
Identification of Human Motion Using Radar Sensor in an Indoor Environment


Abstract
1. Introduction
2. Radar Sensor Data Acquisition and Signal Preprocessing
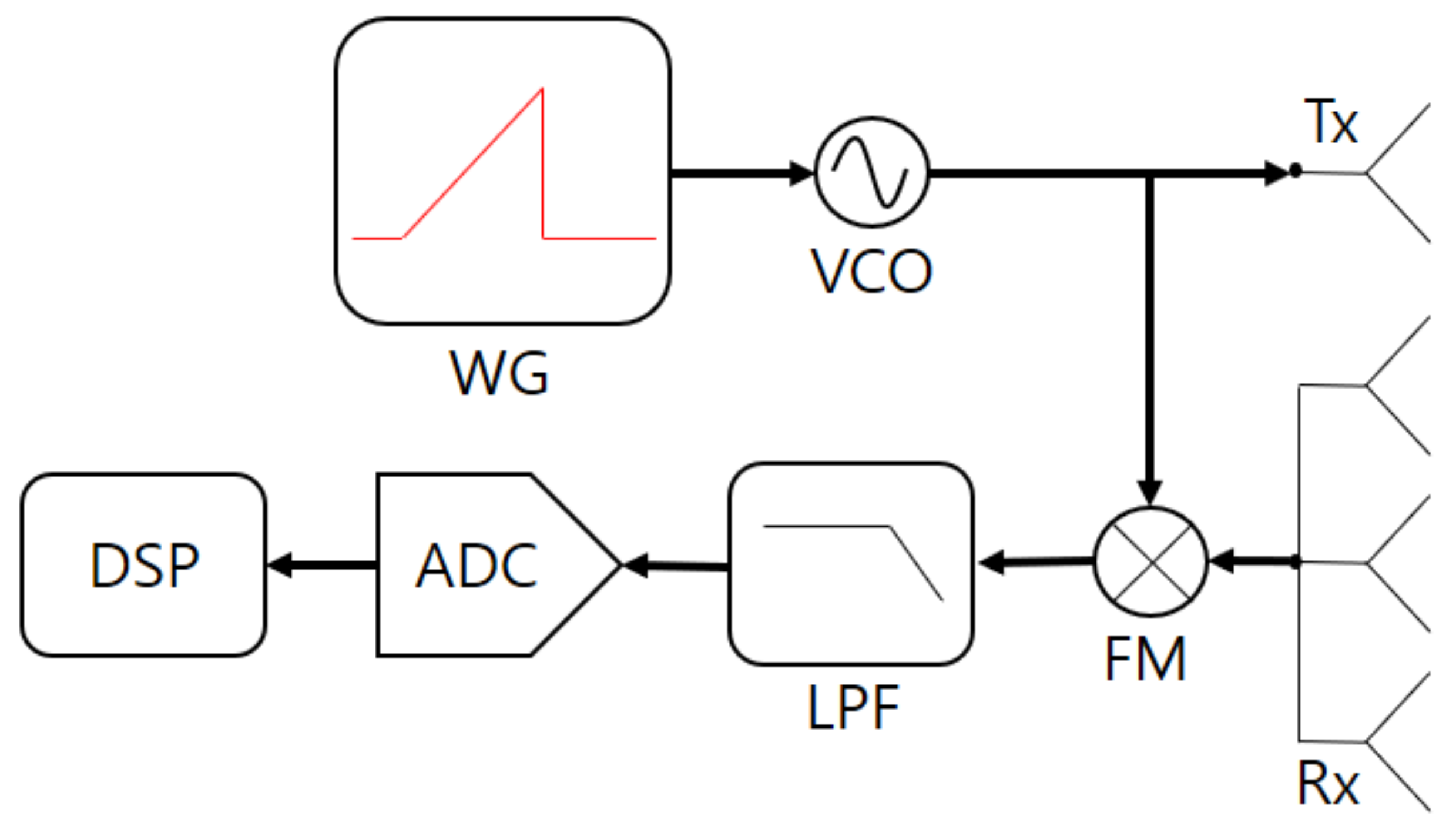
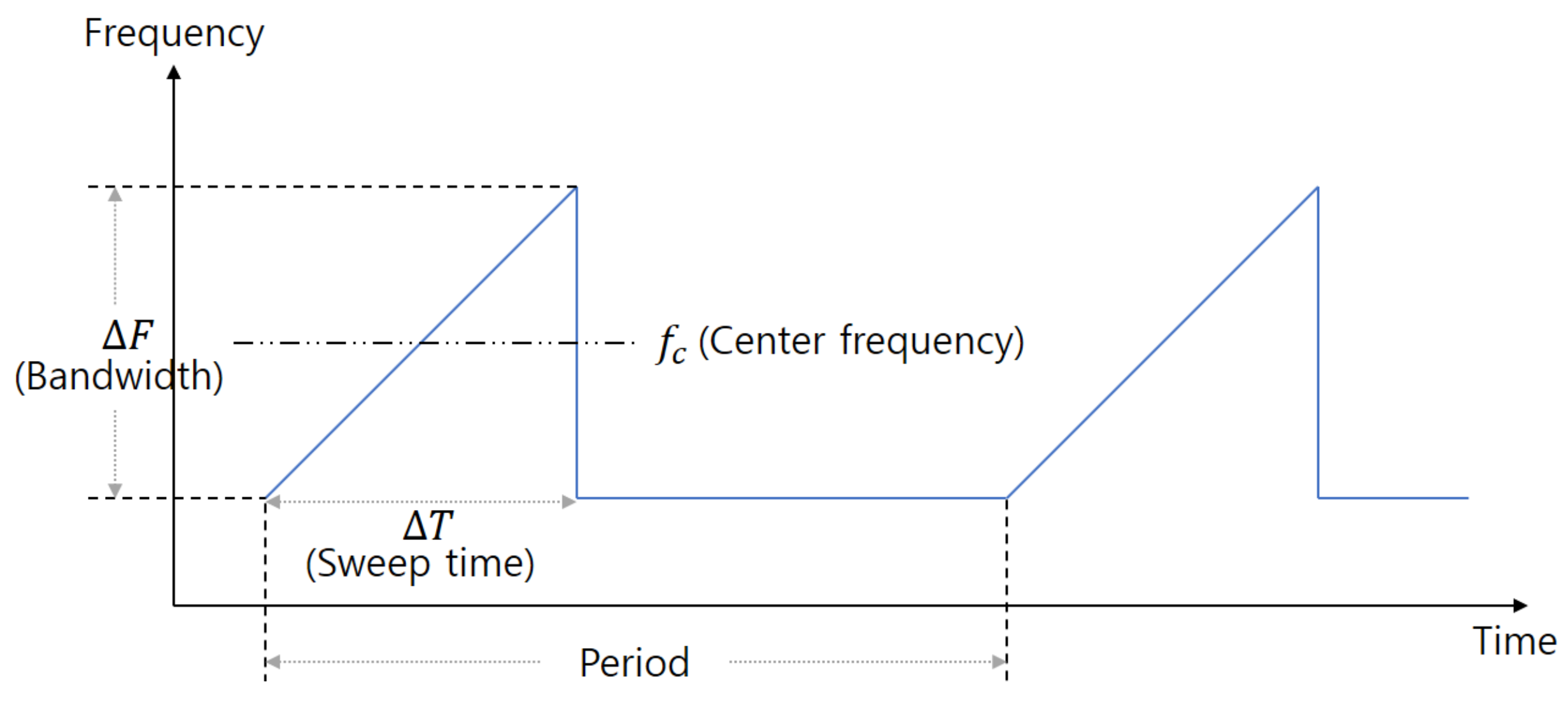
2.1. FMCW Radar Sensor
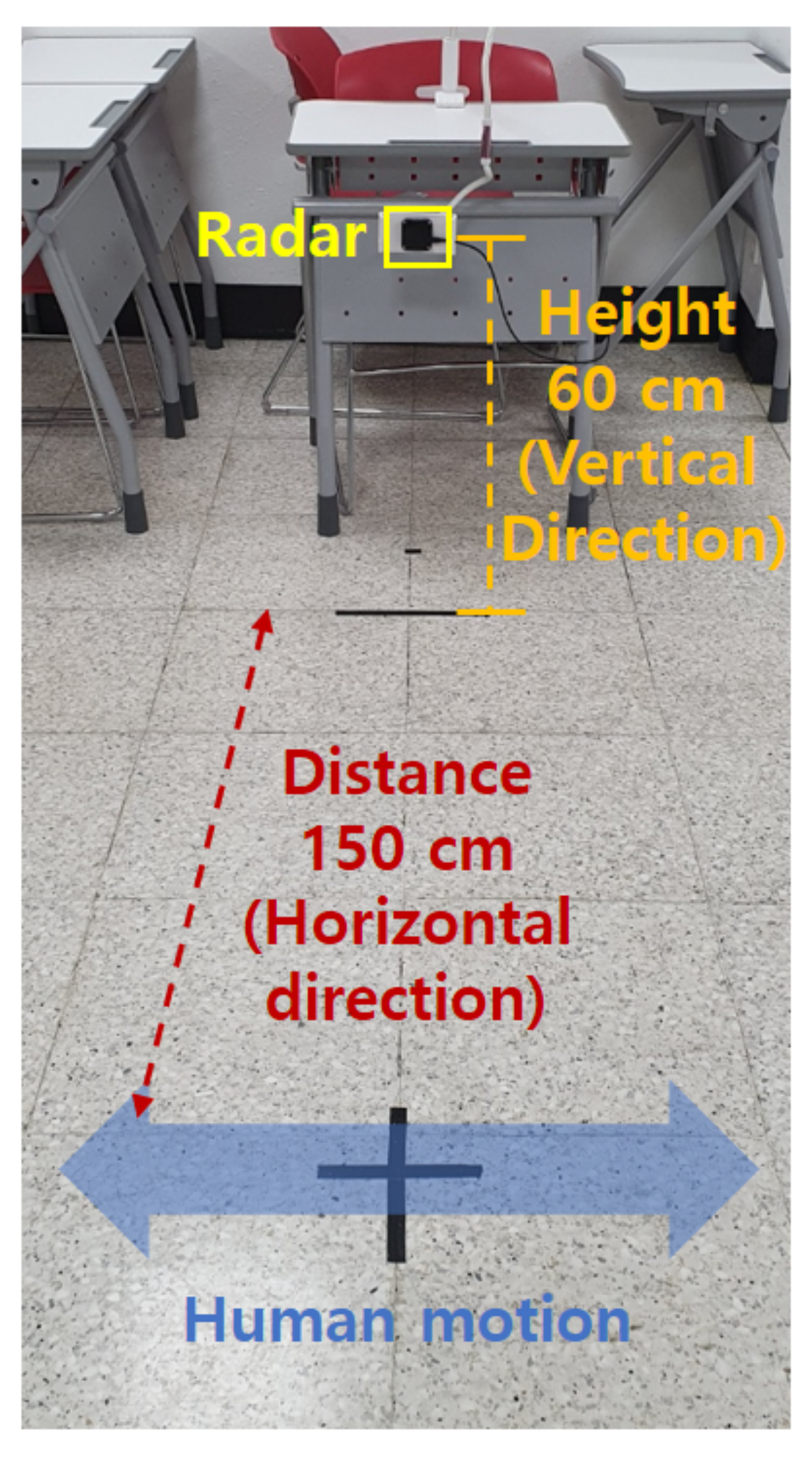
2.2. Measurement Environment
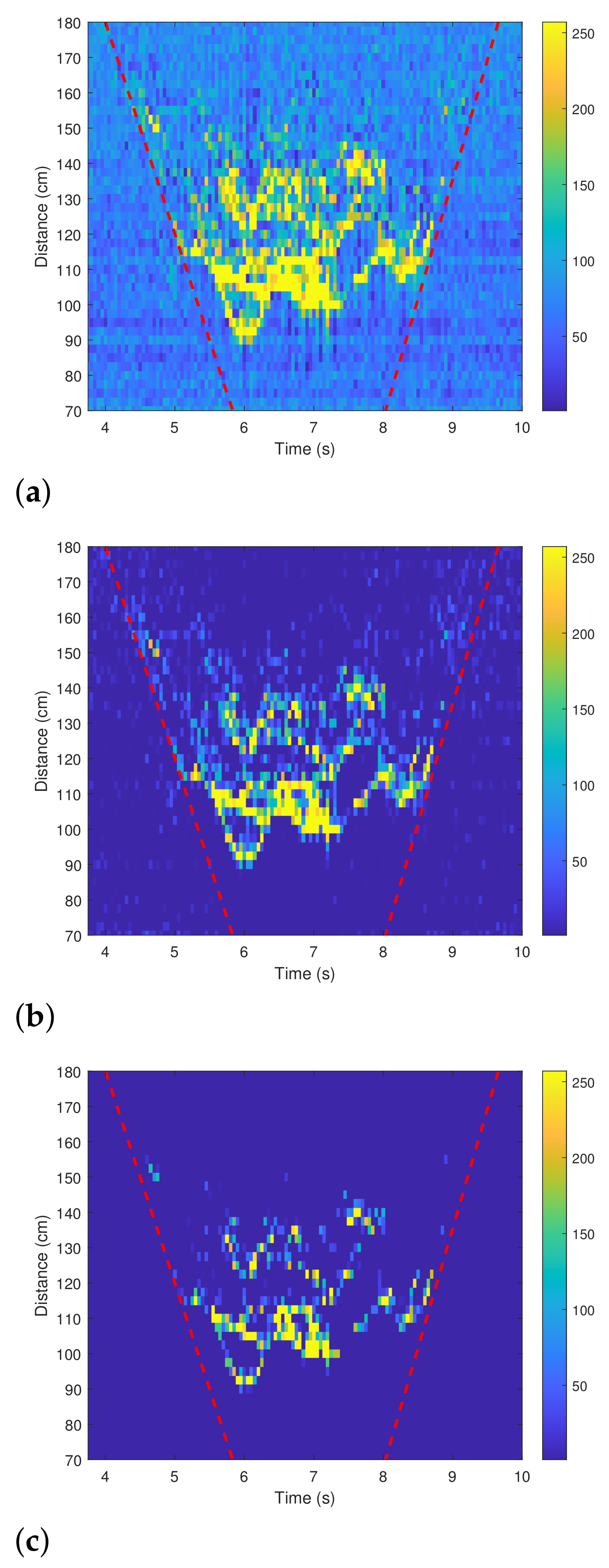
2.3. Preprocessing of Radar Sensor Data
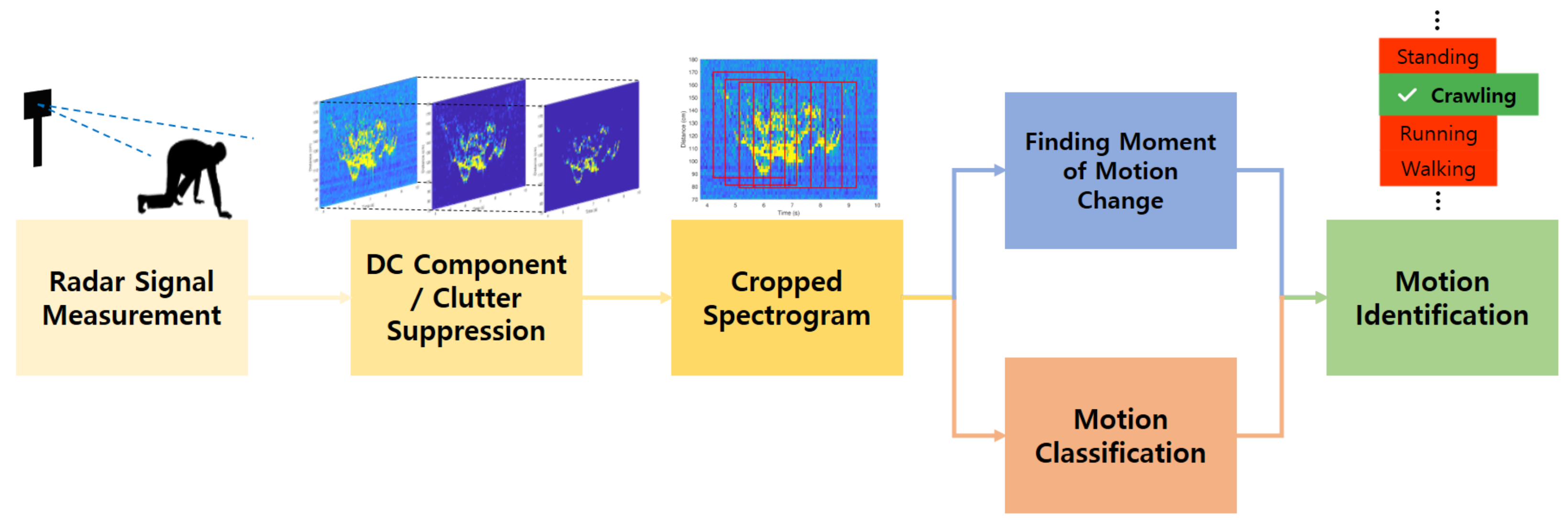
3. Proposed Human Motion Identification Method
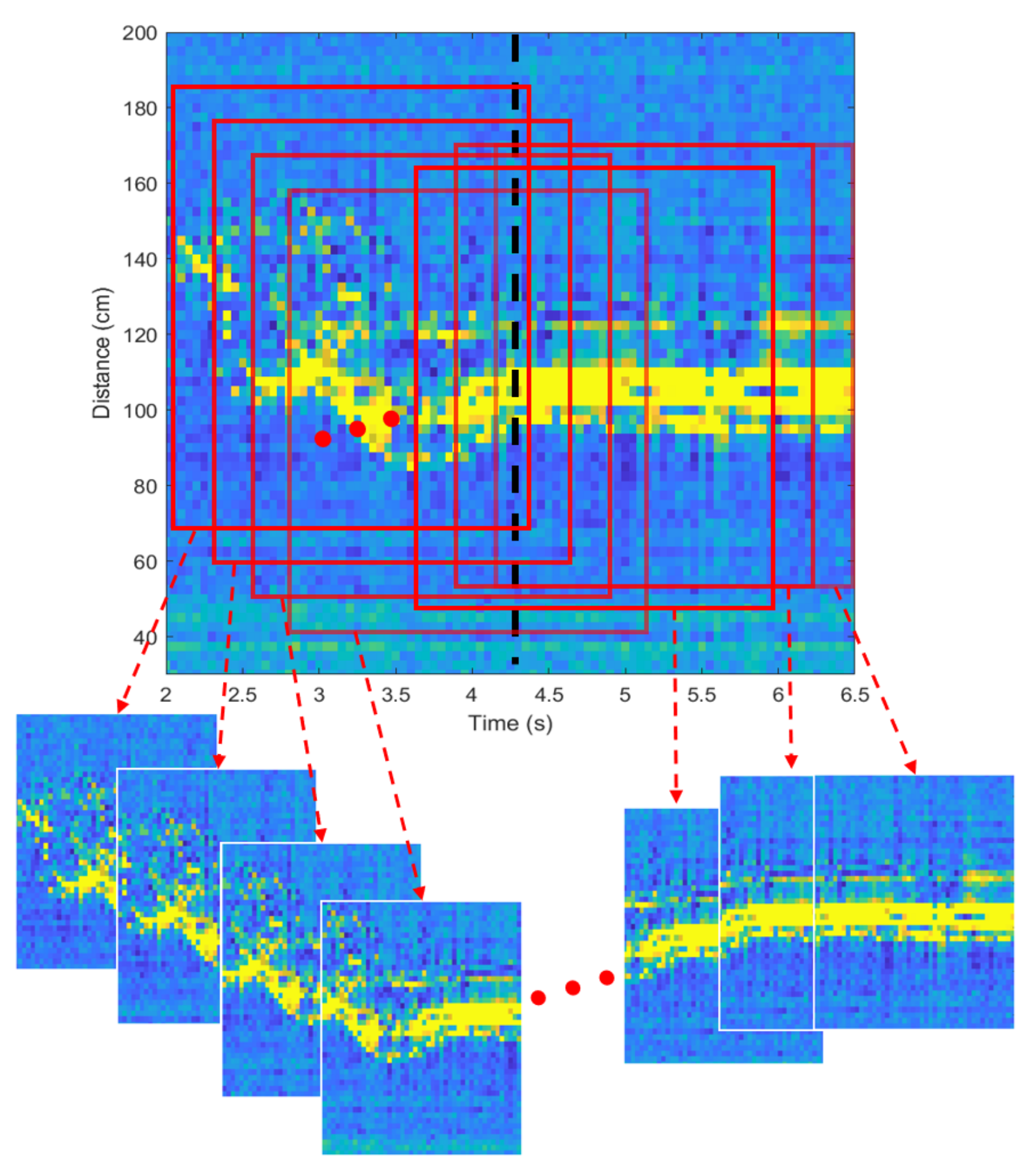
3.1. Generating Input Data
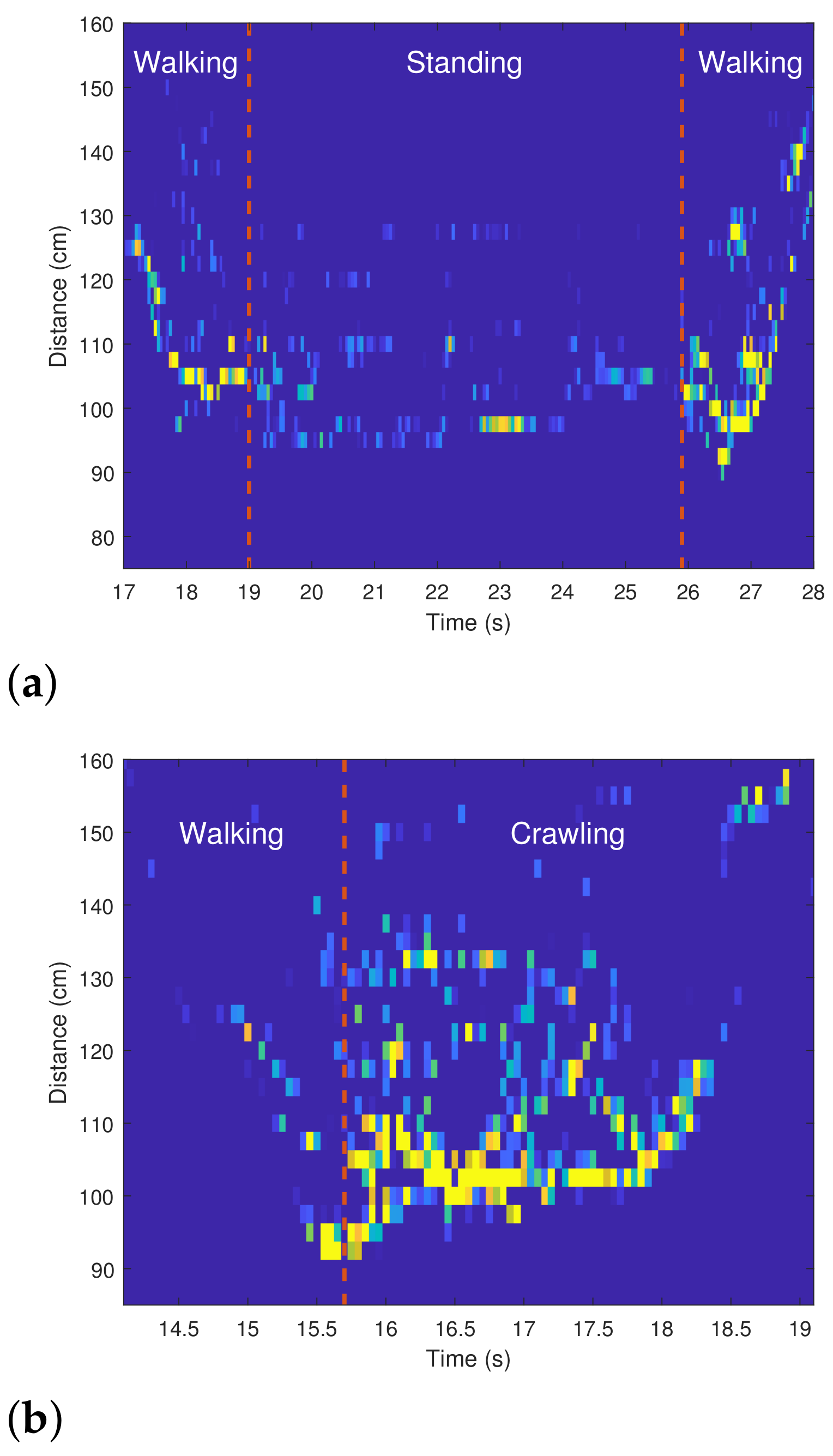
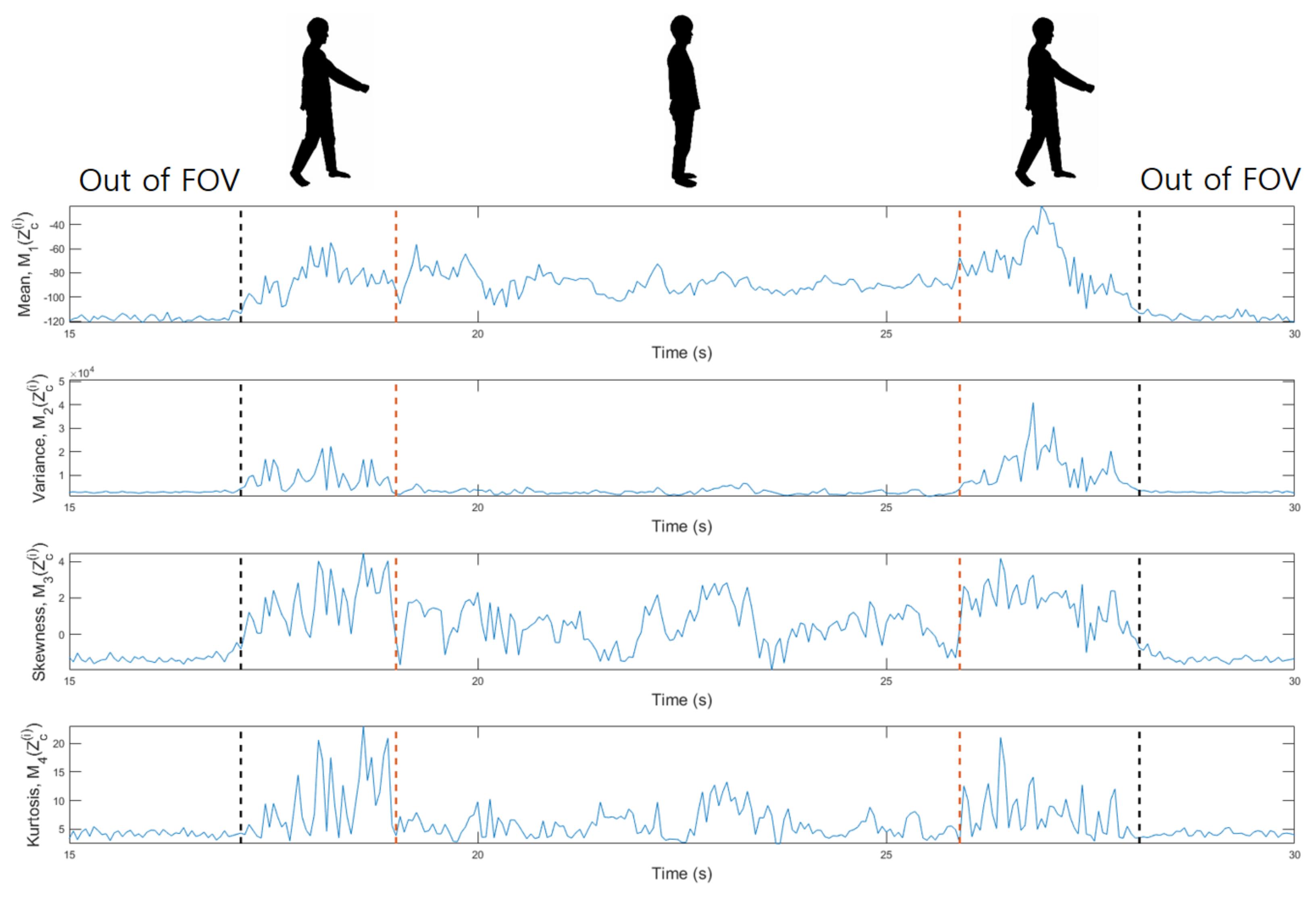
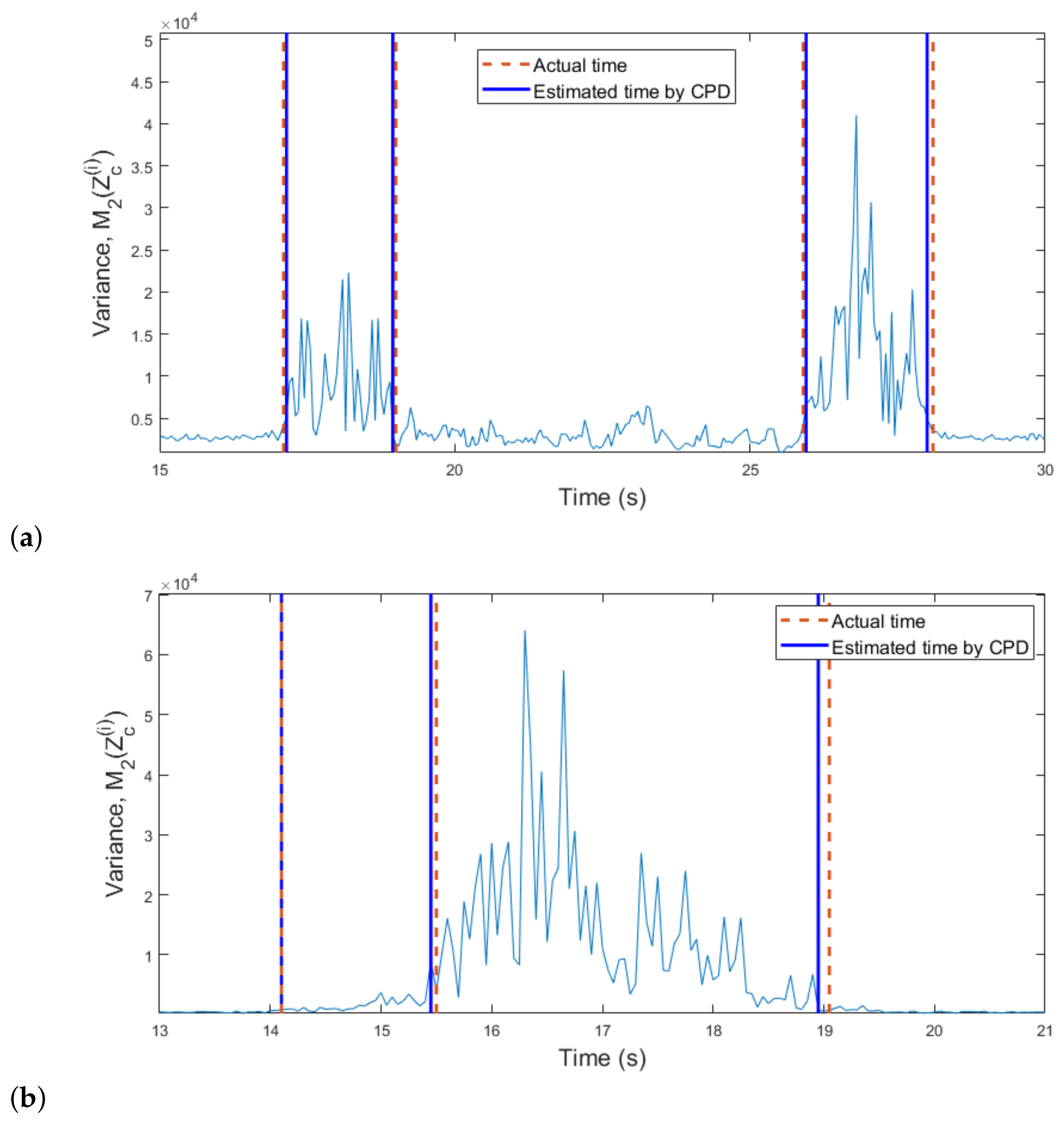
3.2. Determining Moment of Motion Change
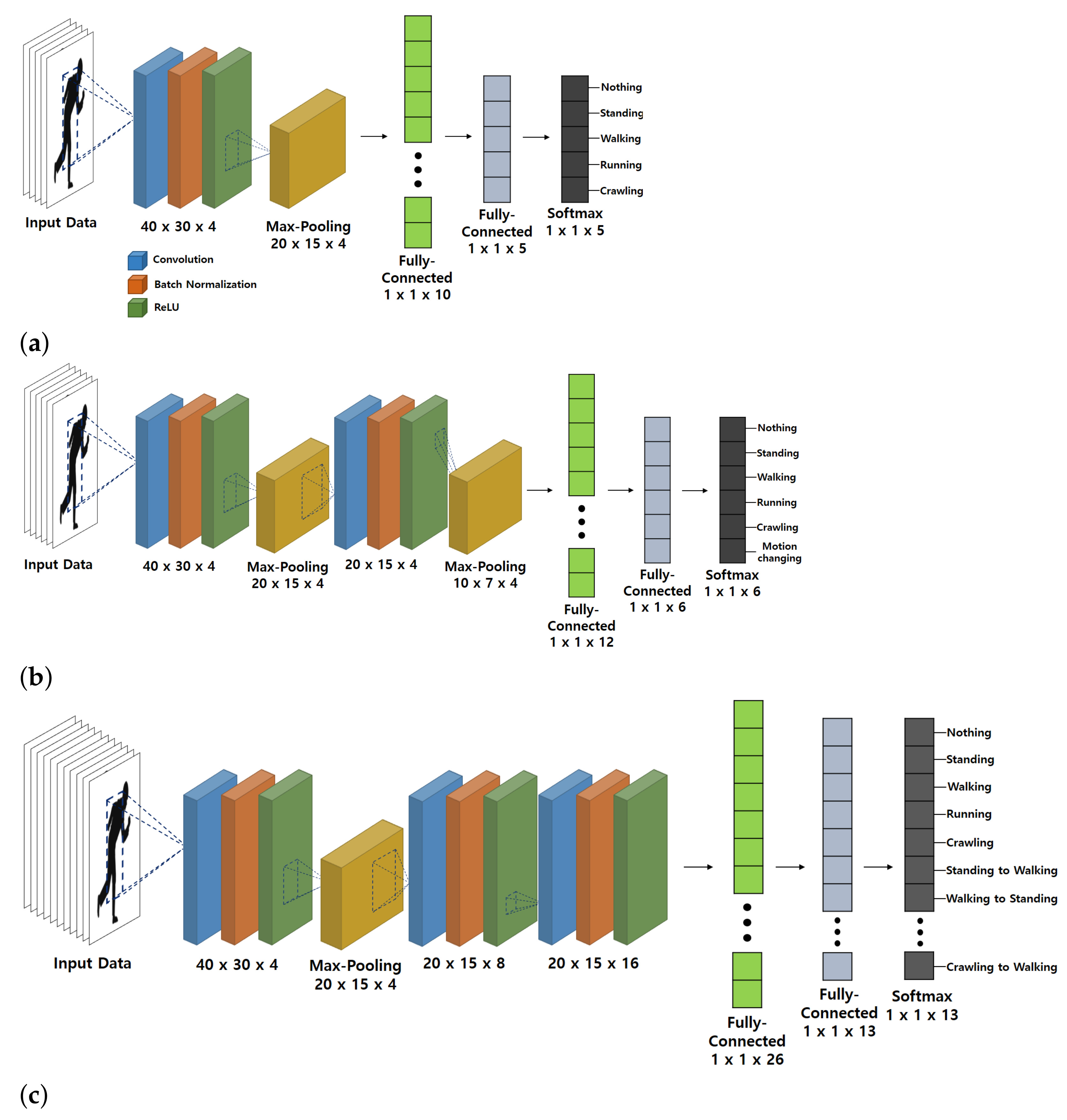
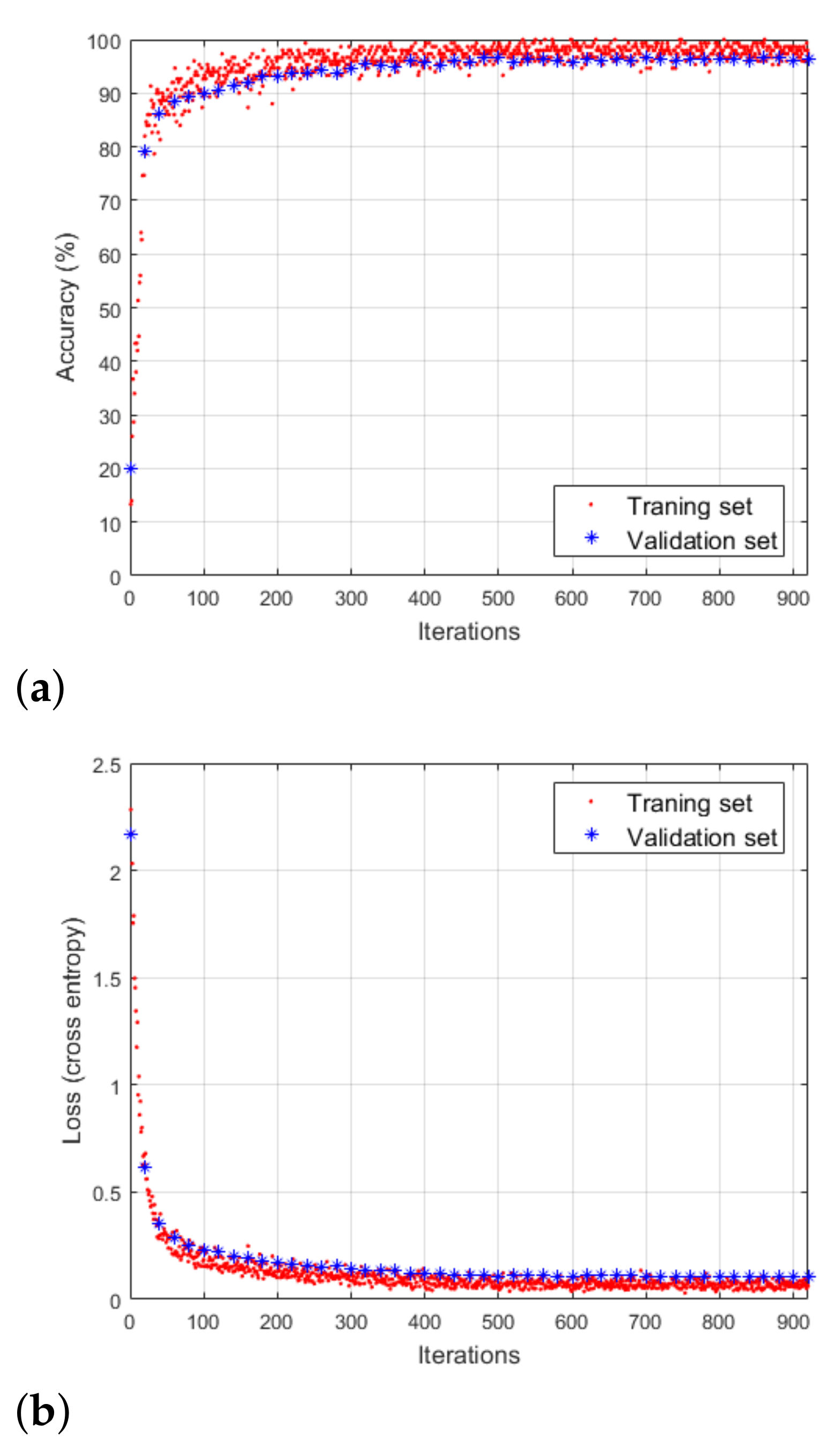
3.3. CNN-Based Motion Classification
- (1)
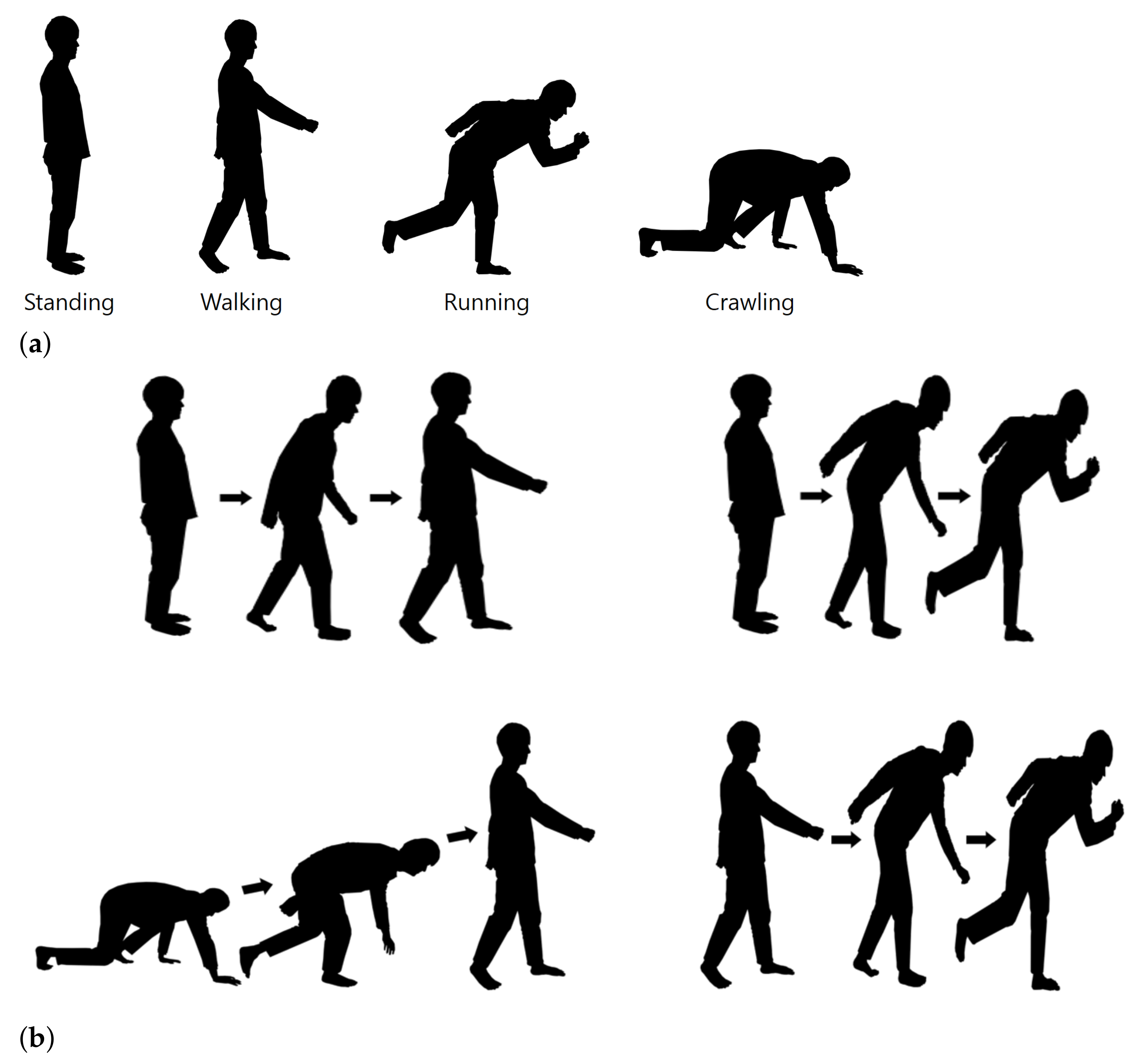
- For single motions.
- (2)
- For single motions and successive motions (assigning successive motions to one and the same class).
- (3)
- For single motions and successive motions (assigning successive motions to different classes).
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ADC | Analog-to-digital converter |
| CNN | Convolutional neural network |
| CPD | Change point detection |
| DC | Direct current |
| DSP | Digital signal processor |
| FM | Frequency mixer |
| FMCW | Frequency-modulated continuous wave |
| FOV | Field of view |
| LPF | Low-pass filter |
| ReLU | Rectified Linear Unit |
| RGB | Red, green, and blue |
| Rx | Receiving antenna |
| Tx | Transmit antenna |
| UWB | Ultra-wideband |
| VCO | Voltage-controlled oscillator |
| WG | Waveform generator |
References
- Patole, S.M.; Torlak, M.; Wang, D.; Ali, M. Automotive radars: A review of signal processing techniques. IEEE Signal Process. Mag. 2017, 34, 22–35. [Google Scholar] [CrossRef]
- Hof, E.; Sanderovich, A.; Salama, M.; Hemo, E. Face verification using mmWave radar sensor. In Proceedings of the 2020 International Conference on Artificial Intelligence in Information and Communication (ICAIIC), Fukuoka, Japan, 19–21 February 2020; pp. 320–324. [Google Scholar]
- Lim, H.-S.; Jung, J.; Lee, J.-E.; Park, H.-M.; Lee, S. DNN-based human face classification using 61 GHz FMCW radar sensor. IEEE Sens. J. 2020, 20, 12217–12224. [Google Scholar] [CrossRef]
- Lim, S.; Lee, S.; Jung, J.; Kim, S. Detection and localization of people inside vehicle using impulse radio ultra-wideband radar sensor. IEEE Sens. J. 2020, 20, 3892–3901. [Google Scholar] [CrossRef]
- Hyun, E.; Jin, Y.-S.; Park, J.-H.; Yang, J.-R. Machine learning-based human recognition scheme using a Doppler radar sensor for in-vehicle applications. Sensors 2020, 20, 6202. [Google Scholar] [CrossRef] [PubMed]
- Massagram, W.; Lubecke, V.M.; HØst-Madsen, A.; Boric-Lubecke, O. Assessment of heart rate variability and respiratory sinus arrhythmia via Doppler radar. IEEE Trans. Microw. Theory Tech. 2009, 57, 2542–2549. [Google Scholar] [CrossRef]
- Sacco, G.; Piuzzi, E.; Pittella, E.; Pisa, S. An FMCW radar for localization and vital signs measurement for different chest orientations. Sensors 2020, 20, 3489. [Google Scholar] [CrossRef] [PubMed]
- Wang, P.; Li, W.; Ogunbona, P.; Wan, J.; Escalera, S. RGB-D-based human motion recognition with deep learning: A survey. Comput. Vis. Image Underst. 2018, 171, 118–139. [Google Scholar] [CrossRef]
- Gennarelli, G.; Ludeno, G.; Soldovieri, F. Real-time through-wall situation awareness using a microwave Doppler radar sensor. Remote. Sens. 2016, 8, 621. [Google Scholar] [CrossRef]
- Rana, S.P.; Dey, M.; Ghavami, M.; Dudley, S. Signature inspired home environments monitoring system using IR-UWB technology. Sensors 2019, 19, 385. [Google Scholar] [CrossRef]
- Jiang, L.; Zhou, X.; Che, L.; Rong, S.; Wen, H. Feature extraction and reconstruction by using 2D-VMD based on carrier-free UWB radar application in human motion recognition. Sensors 2019, 19, 1962. [Google Scholar] [CrossRef]
- Ma, X.; Zhao, R.; Liu, X.; Kuang, H.; Al-qaness, M.A.A. Classification of human motions using micro-Doppler radar in the environments with micro-motion interference. Sensors 2019, 19, 2598. [Google Scholar] [CrossRef]
- Gurbuz, S.Z.; Amin, M.G. Radar-based human-motion recognition with deep learning: Promising applications for indoor monitoring. IEEE Signal Process. Mag. 2019, 36, 16–28. [Google Scholar] [CrossRef]
- Zeng, Z.; Amin, M.G.; Shan, T. Arm motion classification using time-series analysis of the spectrogram frequency envelopes. Remote. Sens. 2020, 12, 454. [Google Scholar] [CrossRef]
- Cohen, M.N. An overview of high range resolution radar techniques. In Proceedings of the NTC’91—National Telesystems Conference Proceedings, Atlanta, GA, USA, 26–27 March 1991; pp. 107–115. [Google Scholar]
- Kim, Y.; Toomajian, B. Hand gesture recognition using micro-Doppler signatures with convolutional neural network. IEEE Access 2016, 4, 7125–7130. [Google Scholar] [CrossRef]
- Dekker, B.; Jacobs, S.; Kossen, A.S.; Kruithof, M.C.; Huizing, A.G.; Geurts, M. Gesture recognition with a low power FMCW radar and a deep convolutional neural network. In Proceedings of the 2017 European Radar Conference (EURAD), Nuremberg, Germany, 11–13 October 2017; pp. 163–166. [Google Scholar]
- Kim, J.; Lee, S.; Kim, Y.-H.; Kim, S.-C. Classification of interference signal for automotive radar systems with convolutional neural network. IEEE Access 2020, 8, 176717–176727. [Google Scholar] [CrossRef]
- Zheng, Q.; Zhao, P.; Li, Y.; Wang, H.; Yang, Y. Spectrum interference-based two-level data augmentation method in deep learning for automatic modulation classification. Neural Comput. Appl. 2020, 1–23. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, R.; Sheng, W.; Han, Y.; Ma, X. Feature extraction and classification of human motions with LFMCW radar. In Proceedings of the 2016 IEEE International Workshop on Electromagnetics: Applications and Student Innovation Competition (iWEM), Nanjing, China, 16–18 May 2016; pp. 1–3. [Google Scholar]
- Amin, M.G.; Erol, B. Understanding deep neural networks performance for radar-based human motion recognition. In Proceedings of the 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018; pp. 1461–1465. [Google Scholar]
- Alujaim, I.; Park, I.; Kim, Y. Human motion detection using planar array FMCW Radar through 3D point clouds. In Proceedings of the 2020 14th European Conference on Antennas and Propagation (EuCAP), Copenhagen, Denmark, 15–20 March 2020; pp. 1–3. [Google Scholar]
- Zhang, R.; Cao, S. Real-time human motion behavior detection via CNN using mmWave radar. IEEE Sens. Lett. 2019, 3, 1–4. [Google Scholar] [CrossRef]
- Mahafza, B.R. Radar Systems Analysis and Design Using MATLAB, 3rd ed.; Chapman and Hall/CRC: New York, NY, USA, 2013. [Google Scholar]
- Oppenheim, A.V.; Willsky, A.S.; Nawab, S.H. Signals and Systems, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1997. [Google Scholar]
- Sim, H.; Do, T.-D.; Lee, S.; Kim, Y.-H.; Kim, S.-C. Road environment recognition for automotive FMCW radar systems through convolutional neural network. IEEE Access 2020, 8, 141648–141656. [Google Scholar] [CrossRef]
- Pittella, E.; Zanaj, B.; Pisa, S.; Cavagnaro, M. Measurement of breath frequency by body-worn UWB radars: A comparison among different signal processing techniques. IEEE Sens. J. 2017, 17, 1772–1780. [Google Scholar] [CrossRef]
- Nezirovic, A.; Yarovoy, A.G.; Ligthart, L.P. Signal processing for improved detection of trapped victims using UWB radar. IEEE Trans. Geosci. Remote. Sens. 2010, 48, 2005–2014. [Google Scholar] [CrossRef]
- Lee, S.; Lee, B.-H.; Lee, J.-E.; Kim, S.-C. Statistical characteristic-based road structure recognition in automotive FMCW radar systems. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2418–2429. [Google Scholar] [CrossRef]
- Killick, R.; Fearnhead, P.; Eckley, I.A. Optimal detection of changepoints with a linear computational cost. J. Am. Stat. Assoc. 2012, 107, 1590–1598. [Google Scholar] [CrossRef]
- Sebastian, R. An overview of gradient descent optimization algorithms. arXiv 2017, arXiv:1609.04747v2. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Consecutive Motions | Mean Absolute Percentage Error |
|---|---|
| Standing and running | 1.5 % |
| Standing and walking | 1.25 % |
| Walking and running | 2.25 % |
| Walking and crawling | 3.75 % |
| Actual Motion | Predicted Motion | ||||
|---|---|---|---|---|---|
| Nothing | Standing | Walking | Running | Crawling | |
| Nothing | 100% | 0% | 0% | 0% | 0% |
| Standing | 0% | 100% | 0% | 0% | 0% |
| Walking | 0% | 0% | 90.85% | 1.44% | 11.83% |
| Running | 0% | 0% | 0% | 98.56% | 0% |
| Crawling | 0% | 0% | 9.15% | 0% | 88.17% |
| Actual Motion | Predicted Motion | |||||
|---|---|---|---|---|---|---|
| Nothing | Standing | Walking | Running | Crawling | Motion Changing | |
| Nothing | 100% | 0% | 0% | 0% | 0% | 0% |
| Standing | 0% | 98% | 1.2% | 0% | 0% | 0.16% |
| Walking | 0% | 0% | 84.94% | 0.78% | 7.48% | 0.16% |
| Running | 0% | 0% | 1.2% | 99.22% | 0% | 0.08% |
| Crawling | 0% | 1.33% | 9.64% | 0% | 92.52% | 0.08% |
| Motion changing | 0% | 0.67% | 3.01% | 0% | 0% | 99.51% |
| Actual Motion | Predicted Motion | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (M1) | (M2) | (M3) | (M4) | (M5) | (M6) | (M7) | (M8) | (M9) | (M10) | (M11) | (M12) | (M13) | |
| Nothing (M1) | 100% | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 0% |
| Standing (M2) | 0% | 100% | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 0% |
| Walking (M3) | 0% | 0% | 100% | 0.61% | 0.72% | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 0% |
| Running (M4) | 0% | 0% | 0% | 99.39% | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 0% |
| Crawling (M5) | 0% | 0% | 0% | 0% | 99.28% | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 0% |
| Standing to walking (M6) | 0% | 0% | 0% | 0% | 0% | 98.08% | 0% | 1.3% | 0% | 0% | 0% | 0% | 0% |
| Walking to standing (M7) | 0% | 0% | 0% | 0% | 0% | 0% | 94.24% | 0% | 8.2% | 0% | 0% | 0% | 0% |
| Standing to running (M8) | 0% | 0% | 0% | 0% | 0% | 1.92% | 0% | 98.05% | 0% | 0% | 0% | 0% | 0% |
| Running to standing (M9) | 0% | 0% | 0% | 0% | 0% | 0% | 5.76% | 0% | 90.71% | 0% | 0% | 0% | 0% |
| Walking to running (M10) | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 0.65% | 0% | 95.42% | 0% | 1.85% | 0.7% |
| Running to walking (M11) | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 1.09% | 3.27% | 98.56% | 1.85% | 1.41% |
| Walking to crawling (M12) | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 1.31% | 0% | 94.44% | 0% |
| Crawling to walking (M13) | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 0% | 1.44% | 1.85% | 97.89% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, S.-w.; Jang, M.-h.; Lee, S. Identification of Human Motion Using Radar Sensor in an Indoor Environment. Sensors 2021, 21, 2305. https://doi.org/10.3390/s21072305
Kang S-w, Jang M-h, Lee S. Identification of Human Motion Using Radar Sensor in an Indoor Environment. Sensors. 2021; 21(7):2305. https://doi.org/10.3390/s21072305
Chicago/Turabian StyleKang, Sung-wook, Min-ho Jang, and Seongwook Lee. 2021. "Identification of Human Motion Using Radar Sensor in an Indoor Environment" Sensors 21, no. 7: 2305. https://doi.org/10.3390/s21072305
APA StyleKang, S.-w., Jang, M.-h., & Lee, S. (2021). Identification of Human Motion Using Radar Sensor in an Indoor Environment. Sensors, 21(7), 2305. https://doi.org/10.3390/s21072305