1. Introduction
In recent years, advances on control systems and wireless communications technologies have facilitated the implementation of complex multi-agent systems (MAS) applications. Industrial processes, transportation systems, and energy systems, to name a few examples, are among the main areas of impact that can be potentially optimized through the design of control algorithms for systems comprised of several dynamical agents, aiming to work in a coordinated fashion [
1,
2,
3,
4,
5,
6,
7]. Given the nature of these type of systems, whose complexity increases with the number of members and interactions, the study of their coordinated behavior is a challenging task, as is the design of appropriate control systems and their implementation. This motivates the development of experimental setups suitable to study such systems and their most relevant aspects, where scalability issues rank as one of the most important.
In this context, scalability refers to the behavior of the MAS when the number of agents increases. A given control system that exhibits an acceptable behavior for a MAS composed of a few agents could cause poor performance for a MAS with a larger number of agents. Scalability is a key aspect in applications such as automated highway systems (AHS), in which a platoon of vehicles are automated to navigate in a highway. In such a scenario, platooning schemes able to achieve a tight formation with a constant speed reference, may suffer from the amplification of disturbances or local errors, as they propagate along the chain of vehicles, inducing performance and safety issues that are intensified as the number of vehicles of the platoon increases [
8,
9,
10]. Such undesirable phenomena is known as string instability.
In this work we are interested in developing an experimental platform for MAS problems where the agents are vehicles that can move in one dimension. Preliminary results in this direction where previously repoted in [
11]. In particular we are interested in a platoon of vehicles that autonomously navigates a track in one direction, maintaining a predetermined inter-vehicle distance while traveling at a desired speed. These types of configurations are suitable for modeling AHS where the vehicles will rarely overtake other members of the platoon, unless they are merging or departing from the formation [
12,
13,
14]. The theoretical aspect of such problem has been widely studied, including configurations where string stability is guaranteed. As the study and design of control schemes is of high theoretical complexity, their practical implementation aspects are no less so, and must be considered. Indeed, to achieve the platooning goal, the vehicles must be appropriately equipped with distance sensors, a computing unit that will determine the acceleration or braking actions and a power stage to manipulate the movement. To achieve a string stable configuration with linear control, the agents must posses, at least, either a measurement of their speed or be able to receive the position and/or speed of the platoon leader [
15,
16,
17]. The latter implies the setting up of a communication network to send and receive information among vehicles. Naturally, the implementation costs of real platoons increase as the number of vehicles in the platoon increase.
The implementation aspects of platooning are highly limited due to space and costs restrictions and are normally carried out for a very constrained number of agents. This has motivated the development of lab-scale experimental setups to study the coordinated operation of autonomous agents in higher education institutions and related companies [
18]. These setups may vary in their technical capabilities, and also their costs and applicability. For instance, in [
19,
20], an experimental platform for autonomous multi-agent systems are presented but with no communication capabilities between agents. In [
21,
22], the agents are not fully autonomous since they are coordinated and controlled by a central processing unit. In [
23,
24,
25] the experimental setups have a high per-agent cost. We find relevant to mention that none of the above works are dedicated to study platooning problems.
In the context of control system laboratories, much effort has been made in recent years to implement robotic kits as tools in aiding with the learning process of secondary and higher educations students (See for instance [
26] for a review of modular robotic kits for teachers). A Project-based learning toolkit and Matlab-based applications for teaching, both using quadrotors, were recently explored in [
27,
28] respectively. The work [
29] reports Arduino-based projects for improving automatic control learning. More recently, works such as [
30,
31] report learning tools that demonstrate fuzzy techniques in a control laboratory project setting.
A large percentage of the works mentioned above are based on low-cost micro-controller units (MCUs), with Arduino boards being the most common; they have become the standard environment in embedded systems development. This is due to their accessibility and the large and active community that has generated a healthy ecosystem for makers and teachers. Within the context of simple autonomous agents, [
32] reports an ultra low-cost line follower agent, based on an Arduino board. Basic Arduino boards such as the UNO are easy to use but they usually require extra components to include wireless capabilities or other features. Another widely adopted framework for control laboratories is the one provided by the LEGO
®, MINDSTORMS
®, kits. In particular, the EV3 (
$350 USD for 2 students) [
33] is a commercially available product for building agents that could perform platooning tasks (as they include sensing devices and are able to be programmed). They are capable of interfacing with Matlab/Simulink with native support, with a LEGO
®, library ready to use. However, this fact does not simplify the implementation of control algorithms. Moreover, their price is not competitive for building a large scale platoon or multi-agent system lab, as it can be attested by the large quantity of similar open platforms developed by researchers and mentioned above. For our platform, we opted for the use of an ESP32 [
34] -based MCU that adopts the ubiquitous Arduino UNO footprint, making it familiar for students and compatible with several breakout boards (or Hats) and existing libraries for Arduino boards and similar MCUs. However, when compared to the Arduino UNO, the ESP32 boards at a similar price range offer increased computational power in the shape of a dual core CPU with higher clocks, increased flash memory, and wireless communication capabilities that are fundamental for cooperative platooning schemes.
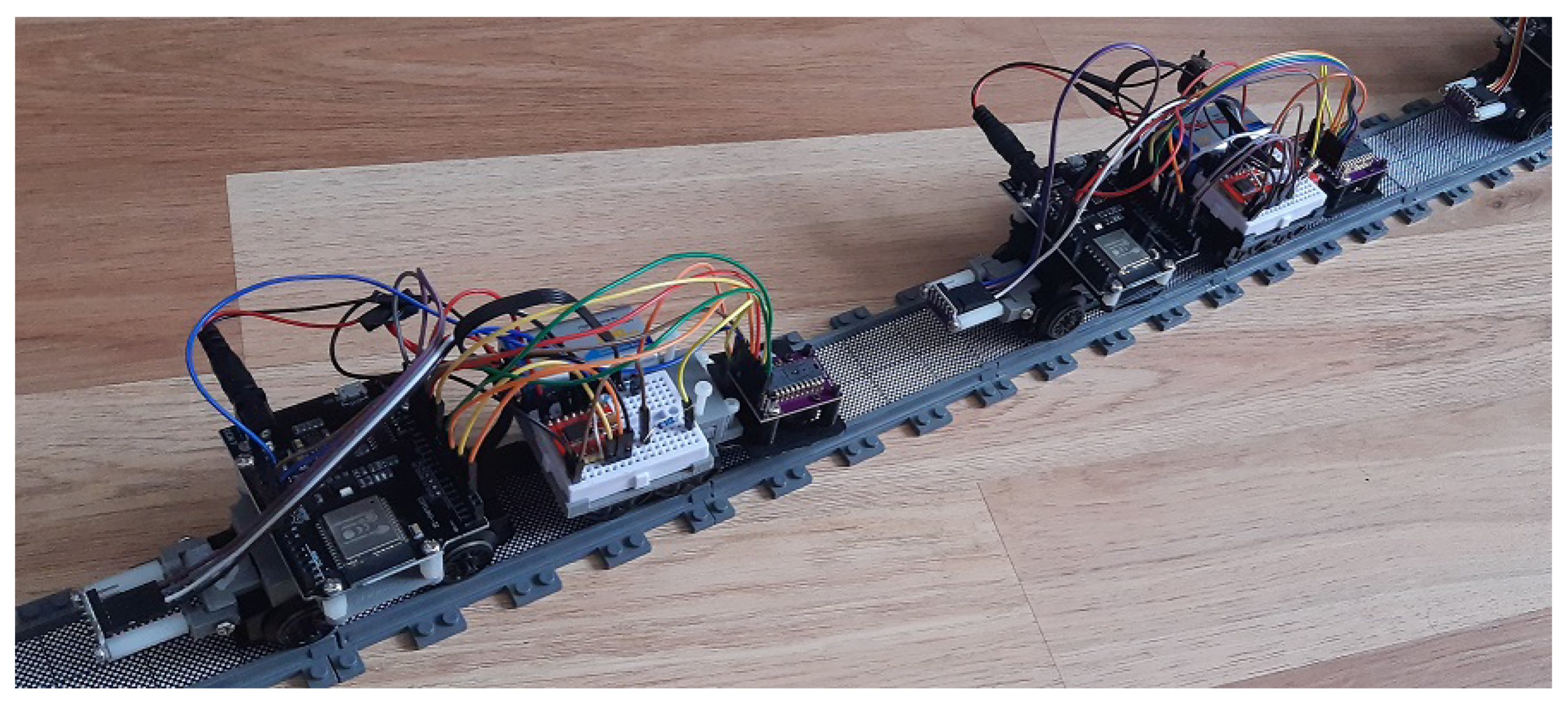
The contribution of this work is to present a scaled down experimental platform to study platooning. The platform is a train-like setup, where agents are restricted to moving along a rail, and such that each agent is able to measure their own speed, their distance to their immediate predecessor and capable of communicating relevant data to each other, enabling cooperative control schemes. The restricted movement allows focusing on the main issues in platooning problems, while the communication and sensing capabilities allow implementing different control algorithms and interconnection topologies with a decentralized processing [
5,
35,
36]. We also include capabilities such that a third-party device can connect to the platoon agents and perform real-time monitoring of the signals of interest in each agent. The proposed platform is designed with a low budget of less than 30 (usd) per agent, but presenting a high degree of flexibility in its capabilities. This is possible due to recent advances in MCUs, low cost sensors and ad-hoc communication protocols for IoT applications, allowing us to develop low cost embedded systems for non-trivial automated tasks. With the designed platform, we are able to illustrate standard control techniques, such as proportional–integral–derivative (PID) control, in a teaching environment, but also validate theoretical results on the complex aspects of string stability and large platoons problems (such as those in [
15,
37,
38]). A repository with the used MCU codes, scripts for supervision and remote configuration, 3D printed models, figures and videos of the platform in action can be accessed at
https://github.com/pl-toon/pl-toon-codes (accessed on 10 March 2021).
The rest of the paper is organized as follows:
Section 2 includes the description of the platooning problem that motivates the platform, presenting some theoretical and practical aspects. Materials and methods are in
Section 3, which presents the design of the agents that comprise the experimental setup, including technical aspects of their components and capabilities. We also describe here the modules and the functions that the agents are capable of performing and their basic configurations.
Section 4 is devoted to the setting up of the platform. In
Section 5 we provide comparisons with the most similar platforms to the one presented here. Experimental results are in
Section 6, where we propose educational activities that can be performed with the use of the platform. In
Section 7 we discuss the scope of the experimental platform and propose research activities to perform. We conclude with some final remarks in
Section 8.
2. Motivational Multi-Agent Problem
As mentioned before, the experimental setup that we present is motivated by the study of the scalability properties of autonomous mobile agents. We aim to provide an open and affordable platform for science, technology, engineering and mathematics (STEM) subjects education, which is functional and flexible enough to serve as an alternative to professionally built ones for platooning research. Specifically, we are interested in the case where each agent is capable of autonomously navigate in a one dimensional setting, forming a platoon of agents that moves in a coordinated way. Platooning has relevance in cooperative adaptive cruise control problems in AHS.
2.1. Platooning Setup
Using a framework similar to the ones presented in [
9,
10], we are interested in the formation control problem for a collection of
N vehicles that travel in a one dimensional track with no overtaking. The position of the
i-th agent is denoted by
, while the inter-vehicle distance is given by
(see
Figure 1). To ease the platooning analysis, researchers commonly assume that the vehicles are identical (homogeneous platoon), with no volume, or length. Also each vehicle dynamic is modeled by a Linear Time Invariant (LTI) system, which is controlled by a local LTI controller. This allows us to use the well-known analytical tools of linear control systems. Consequently, we can use in frequency domain analysis (omitting the Laplace transform arguments
for ease of notation) and write
where
is the Laplace transform of
,
is the Laplace transform of the controller output at the
i-th local controller,
,
is a disturbance at the
i-th agent and
H denotes the frequency domain dynamics of the LTI model for the vehicles.
The main goal is that each vehicle navigates at the same constant speed, while maintaining a desired inter-vehicle distance respect to its predecessor, and rejecting any possible disturbance. This implicitly requires that the platoon leader implements a type of adaptive cruise control strategy, and that the remaining vehicles reach and maintain the cruise speed within a safe distance.
To achieve such goal, each vehicle uses information of themselves and any other vehicle if available. We assume that each vehicle has access to its instantaneous velocity , its position , and the distance to its immediate predecessor , in addition to other local information as control signals, fuel status, etc. However, when assuming wireless communication capabilities in the platoon, such local information can be transmitted to other vehicles located in any arbitrary position in the chain of vehicles. The shared information among vehicles yields a communication network with a specific topology. The communication topology affects, in general, the performance of the entire platoon. Also, depending on the platoon length, the communication network could be complex and hard to implement, so it is desirable to use a simple network topology but ensuring a reasonable performance.
The platooning problem can be divided in two parts: the single agent tracking problem and the multi-agent scalability problem.
2.2. Single Agent Tracking Problem
To achieve the control objective, each vehicle must reach a given speed while maintaining a predefined desired spacing from its predecessor. For simplicity in the analysis, the same is used for every pair of vehicles. The leader () travels in an independent fashion at a constant speed whenever possible. If the platoon is adequately designed, the vehicles will reach the speed of the leader in steady state, achieving the desired formation enforced by . In other words, under no disturbances we will have that and for all as . Notice that the position in steady state should be a ramp signal. The single-agent problem is then to design a controller to achieve such tracking. This of course will depend on the available data at the controller side.
Linear control theory establishes that, if we want to track a ramp signal in a one d.o.f. control loop, two integrators must be placed in the open loop transfer function. Given the vehicle dynamics, the LTI model H has at least one integrator and, thus, the zero steady state error tracking can be achieved requiring local controllers to have integral action. Hence, simple local controllers as PID or PI may be sufficient to design a sensitivity function , where K is the controller, having an acceptable tracking performance. However, depending on the available information and the control scheme, more sophisticated control strategies can be adopted.
2.3. Multi-Agent Scalability Problem
This problem is related to how the whole platoon behaves when more vehicles are added. To illustrate the scalability problem, consider a naive control strategy in which each local controller only uses the positions
and
as
As the vehicles posses mass, integral action is needed for the platooning goal, and each local loop will contain two integrators. According to [
39], such closed loop systems will satisfy
which implies that
, the complementary sensitivity function of the local closed loops, will satisfy
, i.e., there exists
such that
. For this simple interconnection topology of the agents, it has been determined that the effect of disturbances at the leader will affect the inter-vehicle spacing of the
k-th follower through a transfer function possessing the term
[
9]. Consequently, disturbances affecting any vehicle will be amplified as they propagate along the platoon, which can become unsafe or inefficient if the string size
N grows large. This behavior is commonly known as string instability [
9].
To avoid string instability, two alternatives are (i) to use predecessor tracking with a constant time-headway spacing policy and (ii) to use a leader-predecessor tracking scheme with a constant spacing policy. In the following we present these two strategies; however, there are other approaches that can also be studied in the proposed experimental platform of this work.
2.3.1. Predecessor Tracking with a Constant Time Headway Spacing Policy
An alternative to achieve a
string stable platoon is to set [
40]
where
is a parameter and
is a stabilizing controller for the model
H. The parameter
h is the
time headway constant and this strategy can achieve string stability for all
by changing the spacing policy
of the scheme from a constant to a constant time headway. Assuming the vehicles starting at rest in the desired formation, under no disturbances we will have that
and
for all
as
, where
is not fixed in advanced but depends on the agent speed.
This control scheme maintains a simple communication topology but reduces some of the potential benefits that traveling with small pre-defined inter-vehicle spacings can yield [
14].
2.3.2. Leader-Predecessor Tracking with Constant Spacing Policy
Another alternative to achieve string stability is to use information of the leader. For instance, the output of the local controllers for
can be chosen to be [
10]
where
and
are controllers that stabilize
H in closed loop. It can be noted that these control outputs are built by using the distance between an agent and its immediate predecessor and comparing the local velocities to the one of the leader.
This strategy enables the use of a constant inter-vehicle spacing policy given by a distance ; however it requires the leader to broadcast its velocity to the rest of the platoon, which makes the communication topology more complex (and costly) as the number of agents increases.
2.4. Practical Aspects
Each agent should have several sensing capabilities, in order to apply the previous analytical results in a real setting. An experimental setup capable of replicating the behavior of a string stable control scheme requires local measurements, actuators, and communication and processing capabilities. This imposes practical constraints to study platooning in an experimental platform. Indeed, some of the above assumptions may not be satisfied in a practical scenario. However, some of the assumptions are not critical and others can be satisfied with a proper platform design.
For instance, considering agents with no volume as in the previous subsection does not invalidate the analysis or its application in a practical setting, as the relevant information needed for each agent corresponds to the distance from its frontal part to the rear of the predecessor, which can be measured with ranging sensors. The assumption that the agents travel in a one dimensional track can be satisfied with a suitable design of the workspace. Also, the coordination and automation of an arbitrary large number of agents cannot be implemented due to communication, processing and space constraints. However, a proper design of the experimental platform should allow us to work with sufficiently large platoons that exhibit the desired scalability behaviors of interest.
Remark 1. Here, we want to remark that for correctly exhibiting the scalability properties of a platooning configuration, a substantial number of agents may be needed. This, together with commonplace budget constraints (within the academic environment and even more so in developing countries) motivate the design of the proposed experimental setup, as acquiring the required number of agents from established vendors and brands is likely to be prohibitive. In the following sections we document the component selection for the agents, adding emphasis on budget reduction, ease of access and configuration, while ensuring that the requirements are met for these simplified platooning architectures of interest.
4. Platform and Agents Set Up
Once an agent is assembled and programmed, for instance using the base codes provided in the repository of the platform, the set up of the platform can be done. In the following we summarize the functionality of the agents with the provided codes. At the startup, a self-commissioning is carried out by the agents in an automated fashion with the aid of the sensors, facilitating and speeding up the configuration of the agents for a new user.
4.1. Motor Dead-Zone Identification
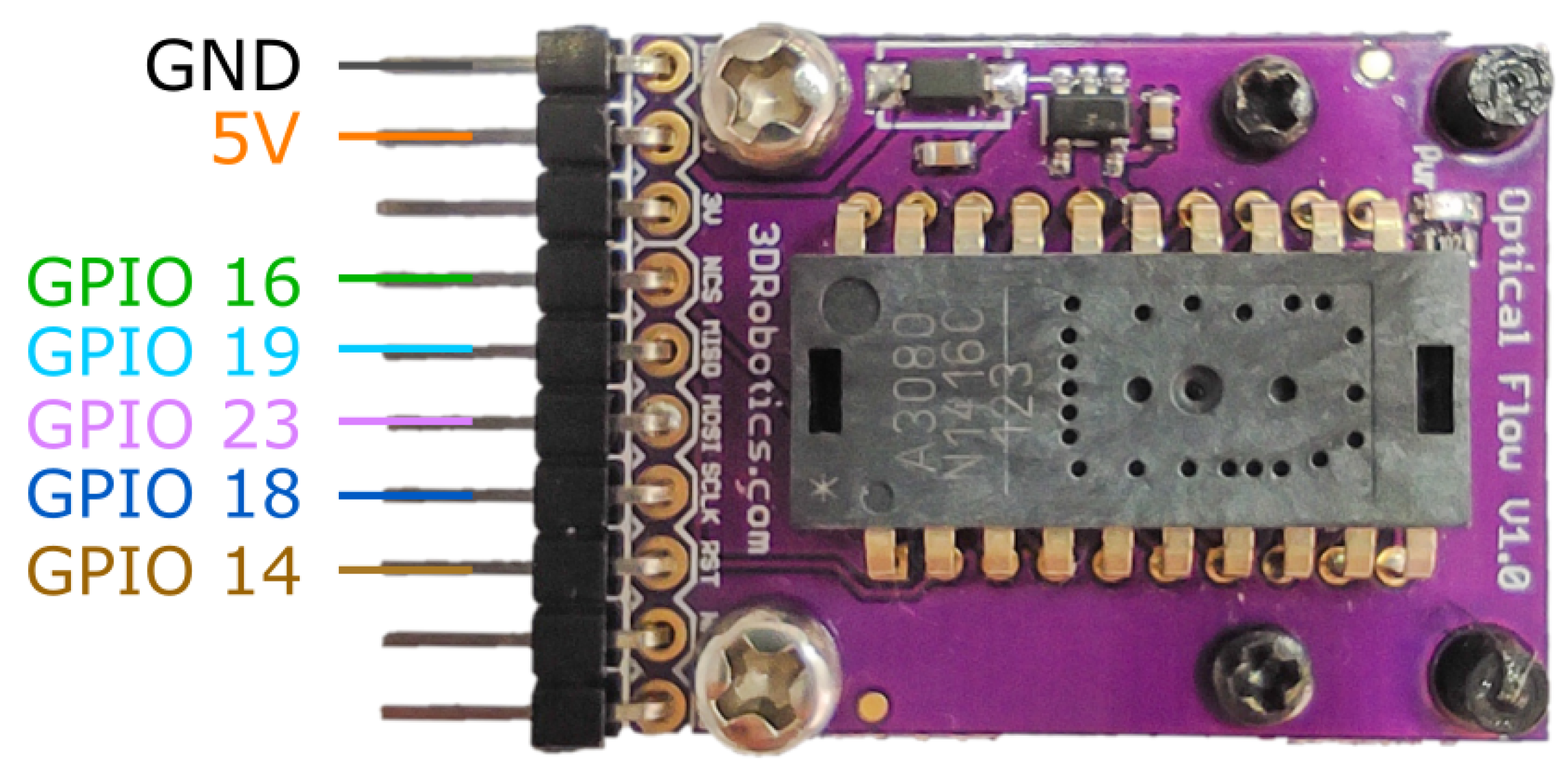
The first step of is to detect the width of the motor dead-zone. For this task we use the ADNS3080 sensor. With a simple loop, the MCU slowly increases the duty cycle of the PWM signal applied to the 9V motor starting from rest. Once the optical sensor registers movement, the process is stopped and the corresponding value is stored for a proper implementation of the control algorithm, ensuring that the PID output is always over the dead-zone threshold whenever it requests the agent to move. As several factors can affect this value (such as battery levels, unexpected obstacles on the tracks, etc.) this process is performed each time the agents are switched on.
4.2. Sensor Calibration
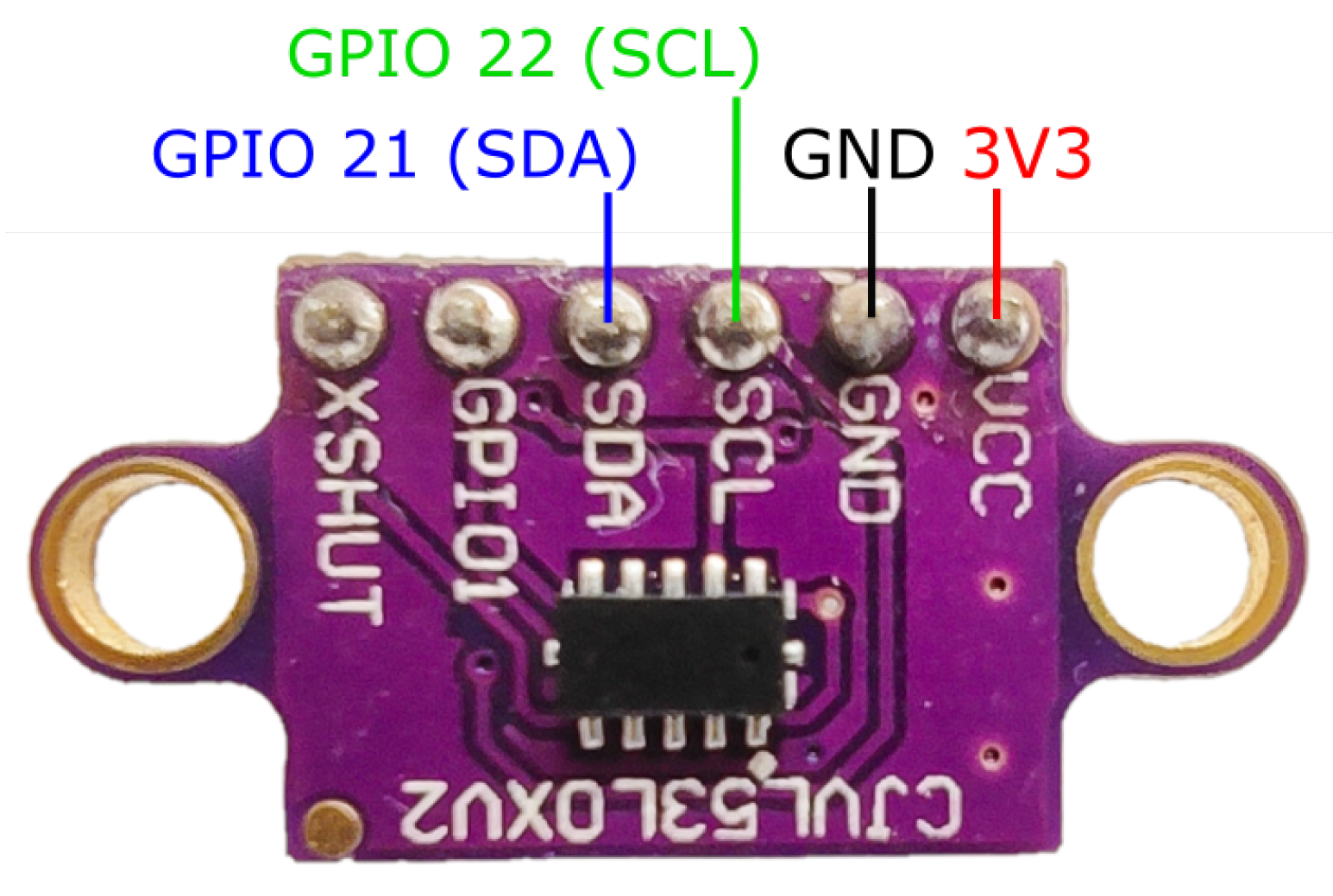
To locally estimate the agent’s velocity, a calibration of the optical sensor is done after identifying the dead-zone. First, using the distance sensor as the reference for the calibration, the agent measures the distance to a standing object. Then the train moves forward and measures its distance to the same object again and does a comparison between the distance traveled measured by both the VL53L0X and ADNS3080. This is then used as a scale factor for future measurements of the optical sensor. The calibration process is done every time the MCU is powered on to guarantee consistent measurements between both sensors and also to make them independent of external factors such as the iteration of the experiment, the battery level and luminosity conditions of the environment.
4.3. Communication Initialization
Finally, the agents coordinate within both communication protocols. For the MQTT protocol, each agent subscribes to predefined topics, referring to relevant quantities (PID parameters, sampling rate, desired control scheme, etc.) or topics used for synchronization purposes. For the ESP-NOW protocol in broadcast mode (as for instance when the leader is the only agent sending date, while the followers listen) the setup is simple. A more involved preliminary step would be required for other communication topologies as the agents require the MAC addresses of their peers.
4.4. Remote User Interaction
Once the agent finishes the set up, it will stay on hold waiting for a start command on the MQTT broker. The reference between agents, the PID parameters, and other internal values, can be changed remotely in real time. After the agents start to use the PID control to regulate their distance to their nearest predecessor or obstacle, their measurements, control signals and other values are sent for supervision. The agents can be also stopped remotely through MQTT messages.
5. Comparison with Other Experimental Platforms
Similar platforms for teaching and research activities have been reported in the literature. For instance, the recent work [
19] reports the development of an open source differential robot (MONA) possessing proximity sensors but lacking wireless communication capabilities in its most basic version. An expansion module can be used to implement inter-agent communication, taking the cost per agent over the
$100 USD mark. In [
21] (microMVP) and [
44] (Colias), two low cost robotic platforms are reported. They are used for the study of trajectory following and swarm research, respectively. The microMVP platform has a per agent cost of
$90 USD and even though the agents posses wireless capabilities through the use of Zigbee modules, vehicles only receive data from a central control computer using a webcam for sensing the positions of the agents on the plane. In such a scenario the agents do not send any data, i.e., there is no inter-agent communication without further modifications. Agents in the Colias platform move on the plane and cost around
$35 USD. They posses distance sensors and IR modules enabling communications with neighbors up to a 2 [m] range and are designed for research of large-scale swarming in a lab setting. As the agents are small and use a high gearbox ratio, there is no need to use a dynamic model and the differential-driven kinematics suffice. Other works such as [
24] and [
22] develop experimental platforms with agents capable of moving in 2 dimensions for implementing decentralized MAS. These platforms are capable of performing trajectory tracking, obstacle avoidance and multi-agent formation control. In both cases, the platforms rely on a hovering camera and a remote PC for supervision and computing of the control signals. The agents used in [
24] have a cost over
$4500 USD.
Table 2 contains a general comparison with the mentioned and other platforms.
The platform proposed in this work considers agents whose dynamic model is easy to identify and also modify. For platooning applications and their development it is relevant to consider this aspect, as properties such as string stability and collision avoidance may only be studied through a thorough mathematical description of the MAS. Moreover, being able to modify the dynamic model of the agents (e.g., by changing the weight of the agents) allows for flexibility of the platform when used in PID control or a system identification lab experience. By simplifying the platform to the 1D case when moving on tracks, we avoid the need for a webcam for supervision and of a remote PC for centralized control. Each agent is fully autonomous and capable of broadcasting its state to any neighbors or central controller, but can be accessed if needed for remote configuration of its parameters in real time. The spatial distribution of the tracks can be made arbitrary large and limited only by the range of the wireless communications and ranging sensors, rather than by the field of view of a camera.
6. Results
In this section we report experimental results in the context of teaching activities to perform with the platform. Research activities are discussed in the next section.
For teaching activities, we consider two types: classroom experiments and lab experiments. In the first case, experiments are not space demanding and can be done in a classroom, where each student or a pair of students, manipulates and studies the movement of one agent. In the second case, more complex experiments can be carried out for a platoon of agents, but this should be done in a lab with appropriate dimensions.
6.1. PID Control Classroom Assignments
Proportional-integrative-derivative (PID) control is one of the most simple but important control techniques. This control mechanism is commonly studied in undergraduate control courses and is widely used in the industry. As stated in previous sections, PID controllers can be implemented in each agent of the platoon to maintain a desired distance between agents. In a classroom environment, single agent experiments can be carried out to teach PID control with minimal set up using the proposed platform of this work.
Below we present a set of laboratory assignments related to the study of PID control and then an specific description of the related activities. This activities are designed for two-students lab groups with the same background, which includes a course in linear systems analysis, and a previous or simultaneous course on control systems in which the theoretical concepts of PID control is studied. The main goal of this activities is to illustrate how an empirical PID tuned controller performs.
With the proposed activities the student should:
Assignment 1: Understand the main characteristics and operation of a single agent of platform.
Assignment 2: Determine suitable controller parameters applying empirical PID tuning techniques.
Assignment 3: Compare the performance of the controller for different PID parameters.
6.1.1. Assignment 1
Students should familiarize themselves with the experimental platform. They must perform a superficial inspection of its components, and then interact with the platform through the monitoring software and dashboard, performing certain basic experiments. For this, students must: (a) Study the dashboard and its functions to obtain the sensor measurements, send control signals to the actuators, store this data and plot it, and to vary the controller parameters. (b) Keep the agent at a fixed distance from an fixed obstacle and plot the measured distance. Repeat this at different distances from the object and verify that the measurements are consistent with the observed distance. (c) Send control signals to the actuators to move the vehicle forwards and backwards, maintaining a certain safety distance from an obstacle. Plot the measurement of the control signal and the measured distance, and check that they are consistent. (d) Obtain the current controller parameters using the software, change them remotely, and then request them again to verify that these parameters were modified successfully.
6.1.2. Assignment 2
Students are required to use the measured distance respect to a static object to run the well known
Ziegler-Nichols second method for PID tuning. In
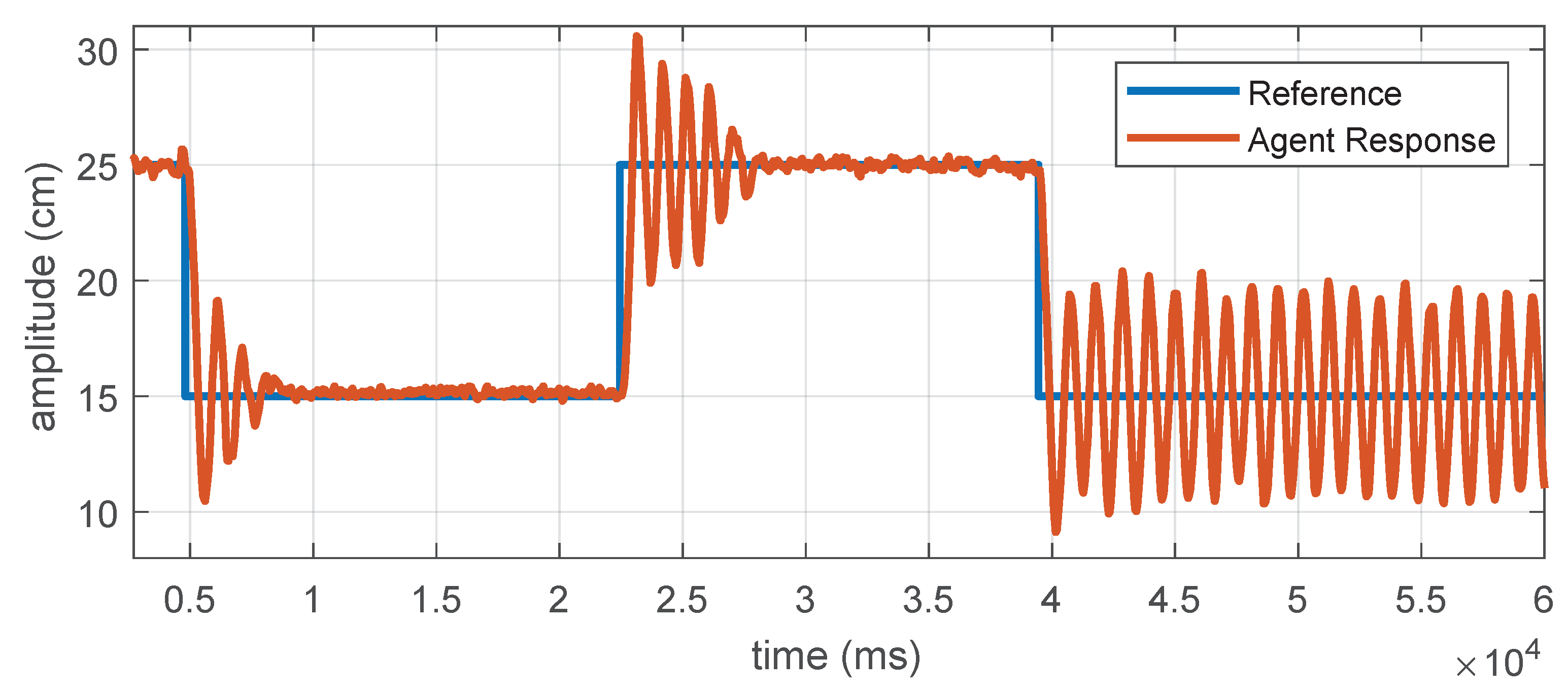
Figure 11 we can observe a plot of such an experiment performed with an agent of the platform. The procedure is as follows: (a) Set
and increase the parameter
in the PID controller, and perform step changes on the desired distance to the static object (blue line) until the measured distance by the ranging sensor (orange line), exhibits oscillations in steady state. (b) Specify the critical value for the gain
, and estimate the frequency of oscillation from the collected data. (c) Use this information to compute a set of values for
,
and
, according to the well-known Ziegler-Nichols gain estimator chart. (d) Test the tuned PID controller using step references and describing the transient and stationary system response.
6.1.3. Assignment 3
The tracking performance of the PID controllers of a single agent can be evaluated running experiments and analyzing the system response. Given the monitoring capabilities within the platform, the rising time, overshoot, tracking errors an other information can be measured quantitatively, allowing for a proper performance evaluation. Additionally, having access to the position and velocity of the agents wirelessly, enables to observe quantitatively in
real time how these measurements change in response to varying the PID parameters
,
, and
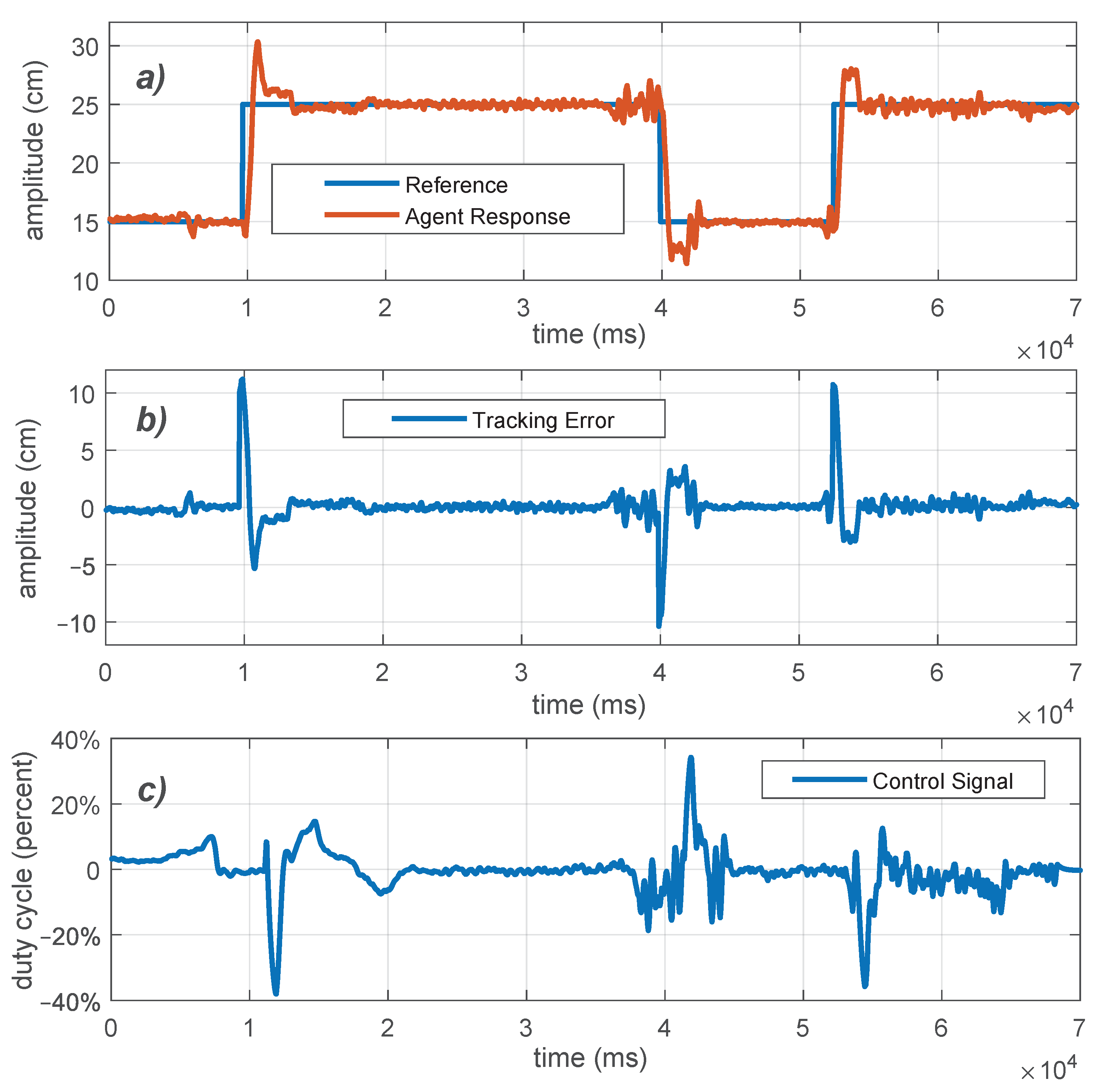
. Such values can be easily changed wirelessly and we can also evaluate the effect of turning off the derivative and/or integrative parts of the controllers. The plots of
Figure 12 show the closed loop step response of a single agent with a PI (first step) and a PID controller (second and third steps) in one experiment, both tuned with the Ziegler-Nichols method. It can be noted that the derivative term provides a smaller overshoot, as it is predicted from classic linear control theory. However, the presence of noise in the output measurements becomes a drawback noticeable in the control action.
Specific activities are: (a) Set in the platform the parameters of a Ziegler-Nichols tuned PID controller and perform a step reference tracking. Store the control action, reference and measured distance. (b) Use the collected data to measure the rise time, overshoot, settling time and tracking error based on an Integral of the Square error (ISE) index. (c) Repeat (a) and (b) for different set of parameters, including the case of , (PD controller), (PI controller). (d) Compare the perfomance of the controllers based on the measured rise time, settling time, overshoot and tracking error.
Remark 2. We want to highlight that the data to generate Figure 11 and Figure 12 were obtained by Electronic Engineering students in a remote laboratory at UTEM (Chile), using similar procedures as the ones we propose. Student feedback of the sessions was positive and most groups were able to successfully execute the tasks of Assignments 1 to 3 of this section. 6.2. Platooning Lab Experiments
The experimental platform can be used to teach undergraduate and graduate students about string stability. This can be done based on well known results (See
Section 2), where some control schemes are not always compatible with string stability.
We propose to use the two control approaches given in
Section 2, namely, predecessor tracking with a constant time headway spacing policy and leader-predecessor tracking with a constant spacing policy. In both cases, a proper controller design yields a string stable platoon, but such design differs from one case to the other. In any case, the experimenters should be aware that the agents could collide for string unstable scenarios. Consequently, they should be prepared in case an agent leaves the tracks accidentally.
Below we specify the assignments for a string stability experience and describe the related activities. The experience is designed for 3 students teams with the same background, which includes a course in linear systems analysis, and a course on control systems and a previous or simultaneous course on advanced control systems where the notion of string stability is introduced.
With the proposed activities the students should:
Assignment 1: Understand the main characteristics and operation of the platform.
Assignment 2: Identify the concept of string instability via experimental results.
Assignment 3: Obtain a string stable behavior in a predecessor-tracking setup.
Assignment 4: Obtain a string stable behavior in a leader-tracking setup.
6.2.1. Assignment 1
To carry out this assignment, students must perform the same activities as Assignment 1 in the previous subsection but adding wireless inter-vehicle communication. Thus, we add some steps: (e) Set a 4 agents platoon on the track, turn on the wireless inter-vehicle communication using the external device software and set it to send the leader velocity to the remaining vehicles in the platoon. (f) Move the leader, setting 30 % of the duty cycle for the motor. (g) Store and plot the leader speed data received in each vehicle and check whether it is concordant with the speed locally measured in the leader.
6.2.2. Assignment 2
Based on the results in
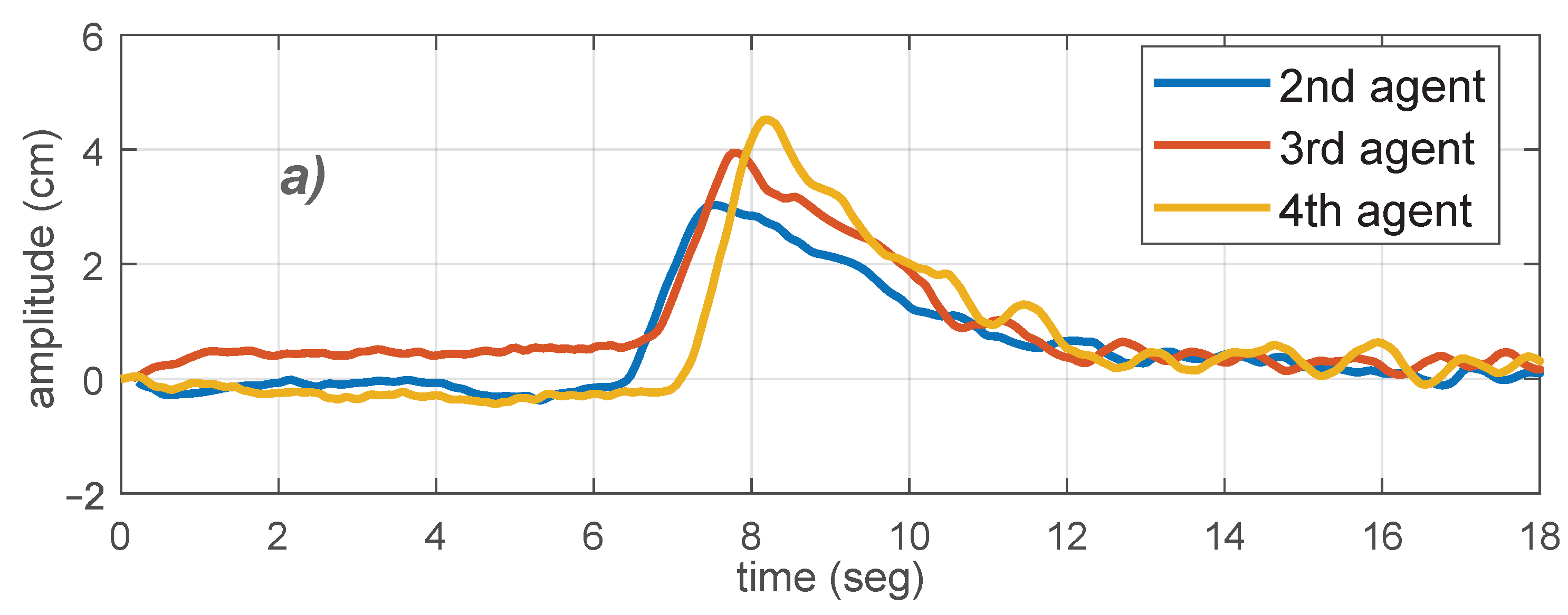
Section 2, one way to observe string instability in a platoon is to consider a simple predecessor-following topology with no time-headway policy. The string unstable behavior can be observed at the beginning of the experiment starting from rest, and also for any abrupt change of the leader speed. An example of what is expected in this type of experiments is depicted in
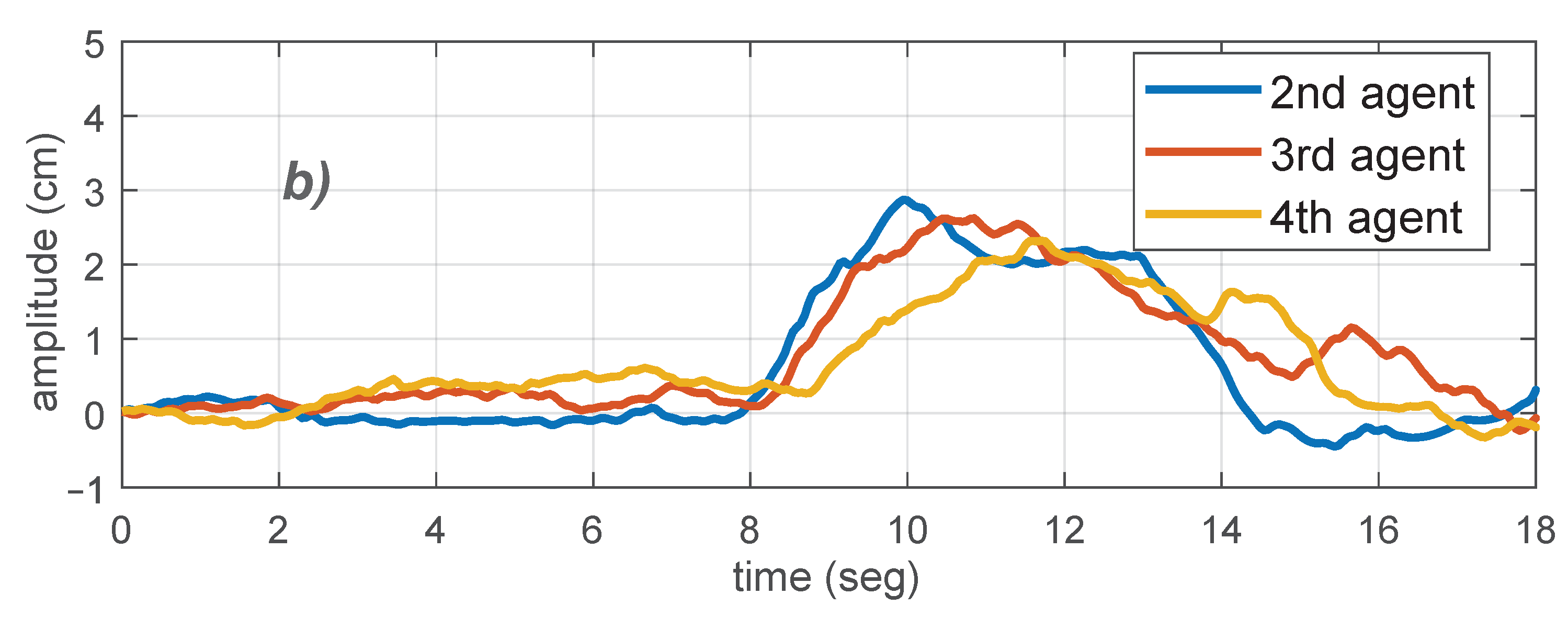
Figure 13, where experimental results were obtained using the proposed experimental platform with platoon of 4 agents. In the upper plot, the tracking error peaks increase along the chain of agents, which is a string unstable behavior.
Steps related to assignment 2 are: (a) Design a PID controller as in the previous subsection and set the corresponding parameters for each local controller. (b) Implement a predecessor-following topology as described in
Section 2. This can be achieved using the local ranging sensor measurements. (c) With the platoon at rest, move the leader with a step signal for the speed and stop when the leader reaches the end of the track. During the experiment, collect data from each agent. (d) Plot the collected data and check a string unstable behavior.
6.2.3. Assignment 3
In this assignment, a string stable controller design must be tested, verifying that agent errors are not amplified along the string. One way to do this is to use a constant time headway policy in the predecessor-following strategy. In
Figure 13b, a strategy based on a constant time headway policy was implemented, leading to a string stable performance.
The tasks to achieve this assignment are: (a) Design a PID controller, for a given constant time headway
h (see
Section 2), such that the string stability condition
is satisfied for this topology. (b) Implement a predecessor-following topology with constant time headway as described in
Section 2. Set the PID parameters and the constant
h obtained in the previous task for each local controller. (c) With the platoon at rest, move the leader with a step signal for the speed and stop when the leader reaches the end of the track. During the experiment, collect data from each agent. (d) Plot the collected data and check if string stability is achieved. (e) Repeat points (a) to (d) for a higher value of the leader velocity. (f) Observe that increasing the leader velocity yields an increasing inter-vehicle distance due to the time headway policy.
6.2.4. Assignment 4
For leader-predecessor tracking schemes, similar experiments can be carried out. In this case, however, the desired inter-vehicle distance is a constant value, so the leader speed can be increased or decreased and the steady state inter-vehicle distance must remain unchanged.
Steps to achieve this assignment are: (a) Design a PID controller, for a leader-predecessor tracking (see
Section 2) such that the string stability condition
is satisfied for this topology. (b) Implement a leader-predecessor tracking setup as described in
Section 2. This can be achieved using the local ranging sensor measurements and the leader velocity transmitted wirelessly to each agent. Set the PID parameters obtained in the previous task for each agent controller. (c) With the platoon at rest, move the leader with a step signal for the speed and stop when the leader reaches the end of the track. During the experiment, collect data from each agent. (d) Plot the collected data and check if a string stable behavior is achieved. (e) Repeat points (a) to (d) for a higher value of the leader velocity. (f) Observe that increasing the leader velocity does not affect the inter-vehicle distance, as expected.
7. Discussion
Platooning and string stability have been widely studied in the literature. However, a large majority of the contributions are theoretical- or simulation-based. The proposed platform was used successfully to implement cooperative platooning algorithms with open software and low cost components. Its affordability (in cost per agent) and flexibility allow for validation or easy prototyping of more involved platooning schemes, while enabling experimentation that complements simulation studies of practical implementations. The proposed platform is a well balanced alternative to perform teaching activities as those proposed in the previous section, but also for testing platooning theoretical results considering the effect of practical and technical aspects such as hardware and software limitations. Indeed, in recent years, practical issues in platooning have become relevant research topics. We now discuss some research applications of the platform.
7.1. Communication Network Aspects
Research experiments can be performed putting the communication network topology, and the information shared by the agents as main subjects. The stability and performance should depend on the kind of information shared between agents, such as speed, position, acceleration, control signals, etc. The network topology establishes which agents are transmitting and receiving certain data. There are many different possibilities to test on the platform by modifying the communication setup.
Communication impairments are also a relevant research topic. One can experimentally observe how communication delays, random data-loss, noisy channels and other communication issues affect the platoon performance. Delays and data dropouts can be emulated via coding or observed under certain conditions. A related experiment could be determining how many agents can be added to the platoon until a communication issue arises due to limited channel capacity. Another possibility is to measure how far the leader can broadcast its data to the rest of the platoon and test whether the speed of the agents plays a role.
7.2. Security in Cyberphysical Systems
Security issues are also an important research topic. Since the platoon may rely on a communication network, a critical aspect in a real application is ensuring transmitted data is not corrupted, changed or accessed by external attackers. There are several types of cyber-attacks against which agents must be protected. The platform allows for testing security algorithms and/or protocols that can be used for this needed protection.
7.3. Advanced Control Algorithms
Finally, it is important to highlight that not only PID control can be tested within the micro-controller unit. Indeed, more sophisticated control and estimation algorithms can also be implemented, such as Kalman filtering, linear quadratic regulator (LQR), model predictive control (MPC), etc. Clearly, the computational demand of the MCU must be considered given the unavoidable processing speed limitations. For instance, designing predictive control with long prediction horizon would become infeasible to implement. Nevertheless, the platform is designed to be flexible not only in the communication topology, but also in the control algorithms to be used for both teaching and research.
7.4. Platform Limitations
As the platform is built with low cost components, there exist some limitations on what the agents are capable of achieving. The ToF module VL53L0X can only measure up to 2 (m) with a precision nearing 5 (mm). Moreover, there are some strict timing constraints that limit the fastest sampling time to 20 (ms). Speed measurements with the ADNS3080 can achieve resoultions of 1 (cm/s) and detect speeds up to 100 (cm/s) with the timing constraints imposed by the ranging sensor. Both of these measurements have noticeable amounts of noise that can are managed with simple filtering routines (included in our routines at the repository). Abrupt changes of direction of the agents may lead to wheel slippage.
8. Conclusions and Further Platform Development
We presented an experimental multi-agent system platform for teaching of control labs and platooning. The design of the platform is open, low-cost, flexible and capable enough for the verification of cooperative platooning schemes.
The individual agents of the platform are also well suited for teaching of PID control labs (and embedded systems). Moreover, the agents can be accessed and supervised remotely, enabling remote experiences for very low costs, complexity and assembly time.
The platform was used as a teaching tool for remote laboratory modules, mitigating the effects of the 2020 pandemic at the Faculty of Engineering of Universidad Tecnológica Metropolitana, in Santiago de Chile.
Future works with the platform will include the development of an easy to use Graphical User Interface for remote labs and verification of other platooning control schemes. Novel research directions aided by the platform will consider the proposal of new control schemes with different spacing policies and interconnection topologies, and the study of the effects of lossy communications on the scalability properties of multi-agent systems.
We conclude by mentioning that it is reasonable to assume that more powerful MCU and better sensors in similar formats will be available in the future. Given the open design of the agents, updating the MCU or any other part, maintaining the basic functionality, should be possible, allowing extending the lifespan and improving the capabilities of the agents and the platform.


 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}