
Autonomous Ground Vehicle Lane-Keeping LPV Model-Based Control: Dual-Rate State Estimation and Comparison of Different Real-Time Control Strategies


Abstract

1. Introduction
2. Control Strategies
2.1. Inverse Kinematic Bicycle Model-Based Controller
2.2. Linear Parameter Varying-Model Predictive Control
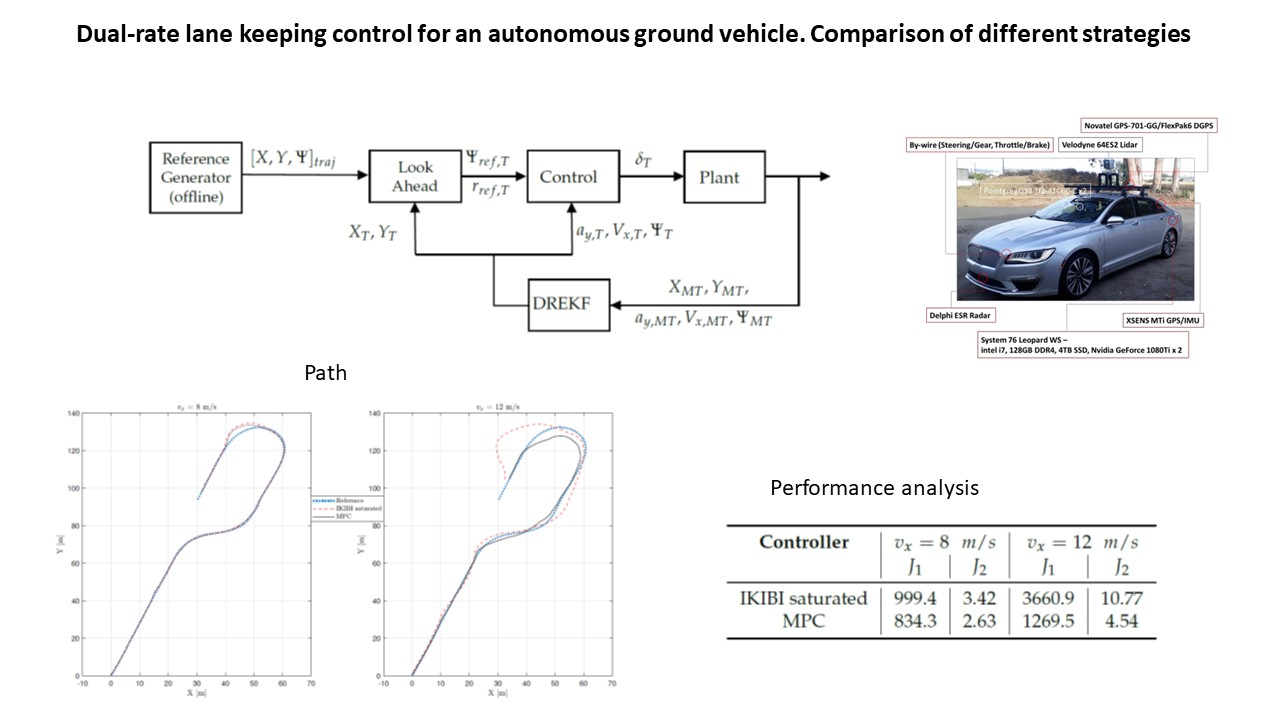
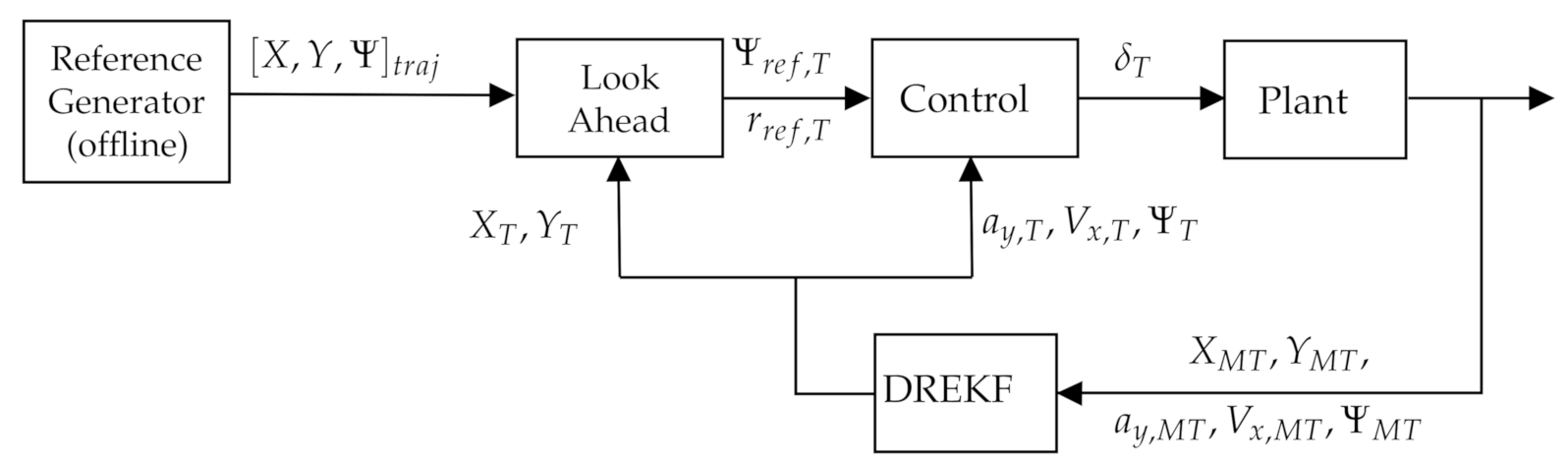
3. Dual-Rate Extended Kalman Filter
- Fast-rate calculations:
- –
- Prediction of the next state and propagation of the covariance . These computations are calculated :where , being the expectation, and where and are Jacobian matrices computed in order to respectively linearize the process model about the current state and about the process noise:
- –
- State and covariance shifts, for and , respectively. These computations are calculated when measurements are not provided, that is for :
- Slow-rate calculations, which are computed when measurements are provided, that is for :
- –
- Prediction of the future output :
- –
- Computation of the Kalman filter gain :where and are Jacobian matrices calculated in order to respectively linearize the output model about the predicted next state and about the measurement noise:
- –
- Correction of the state and correction of the covariance :
4. Implementation
4.1. Simulation Details and Design Choices for the Controllers
4.2. Performed Tests’ Selection
4.3. Cost Indexes Used to Measure Performance
- , which is based on the -norm, and its goal is to provide a measure of how accurately the path is followed:where l is the number of iterations required by the AGV to reach the final point of the path, is the current AGV position, and is the nearest kinematic position reference to the current AGV position.
- , which is based on the -norm and is defined to obtain the maximum difference between the desired path and the current AGV position:
5. Results and Discussion
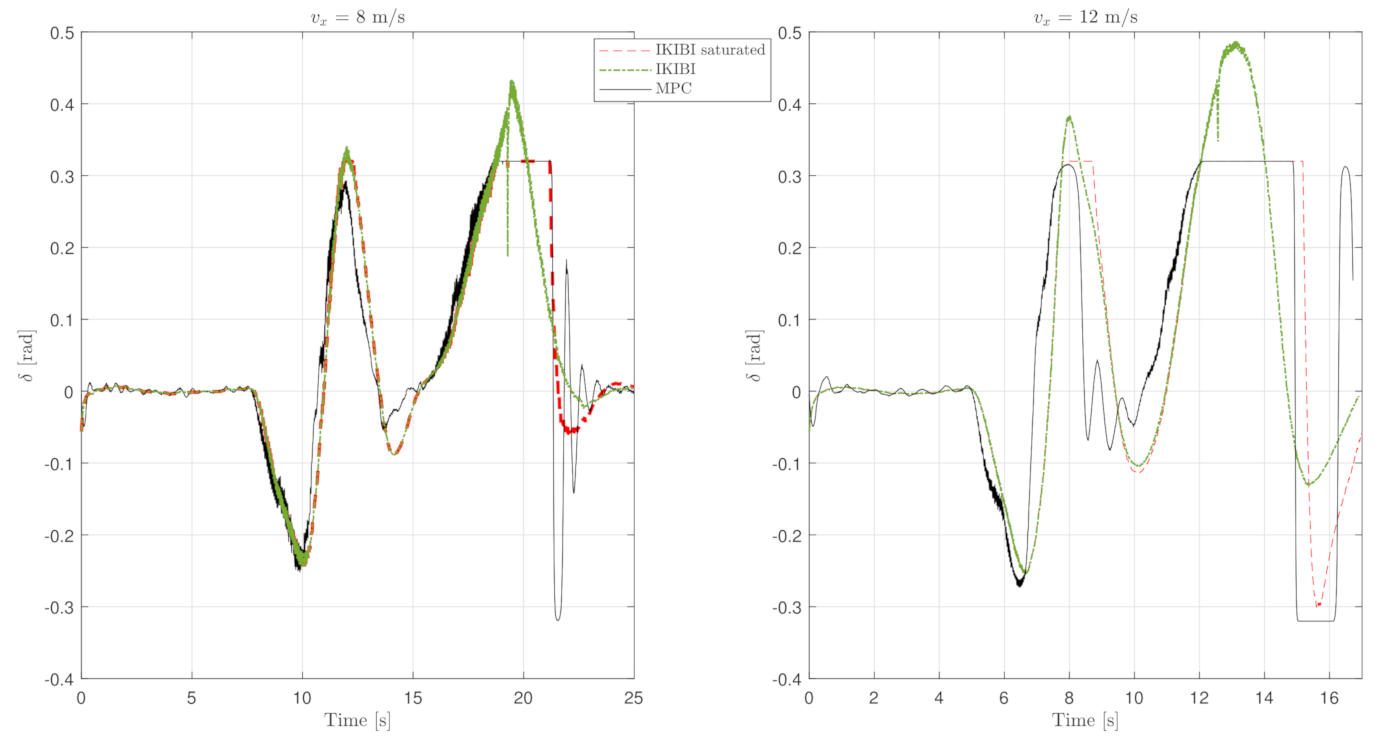
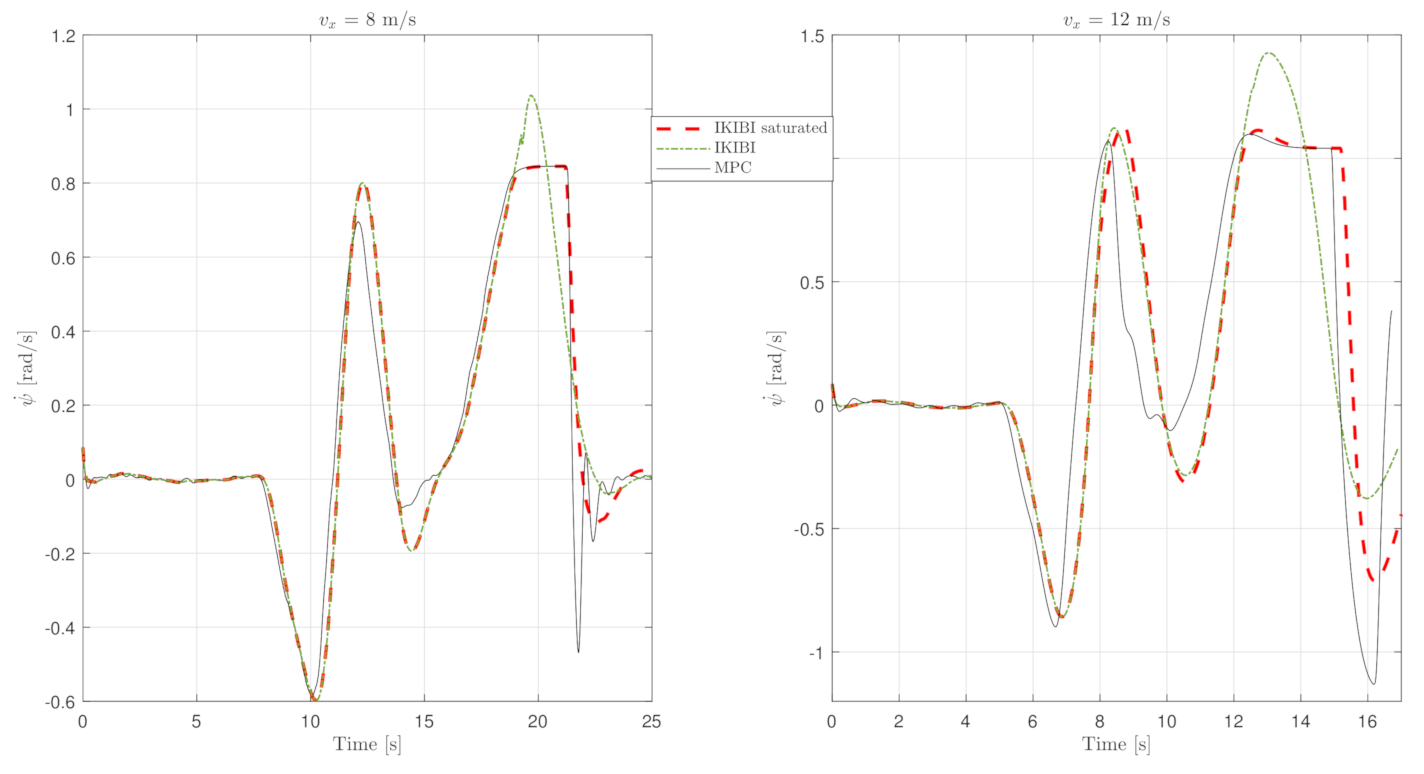
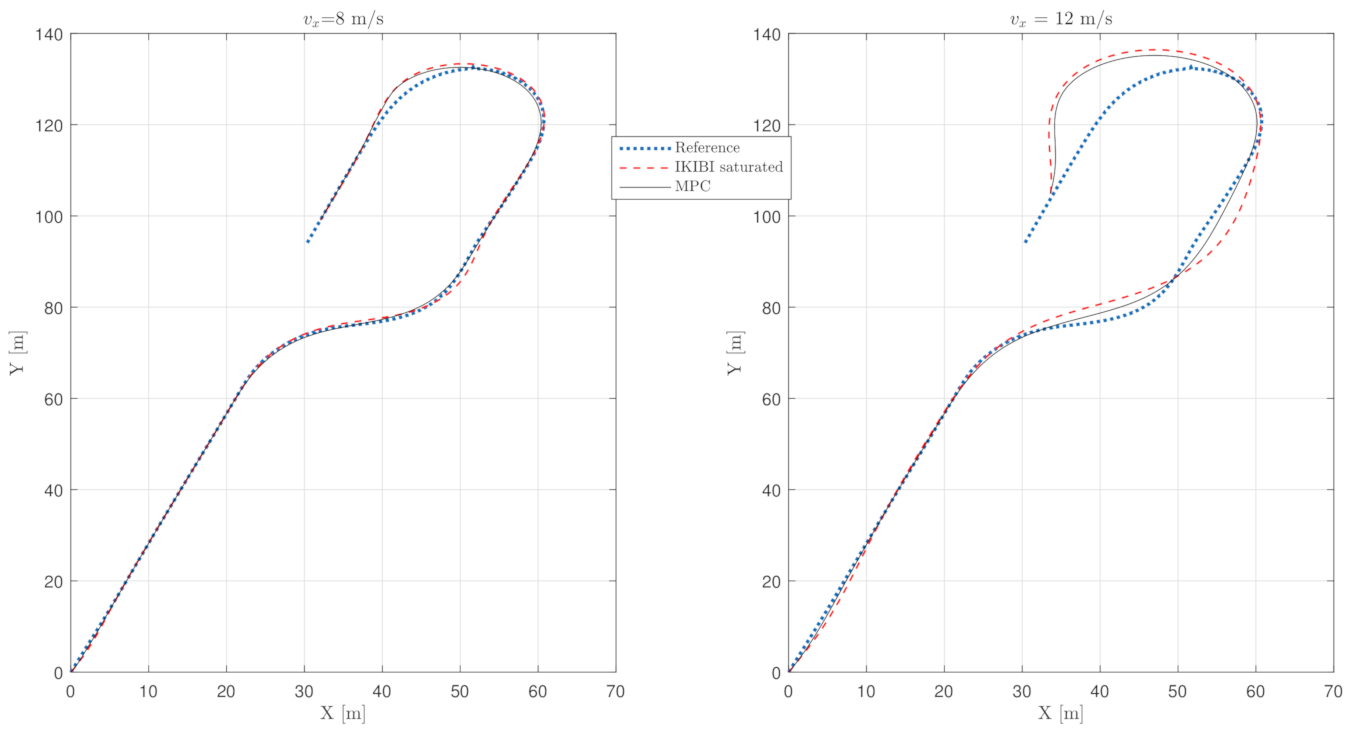
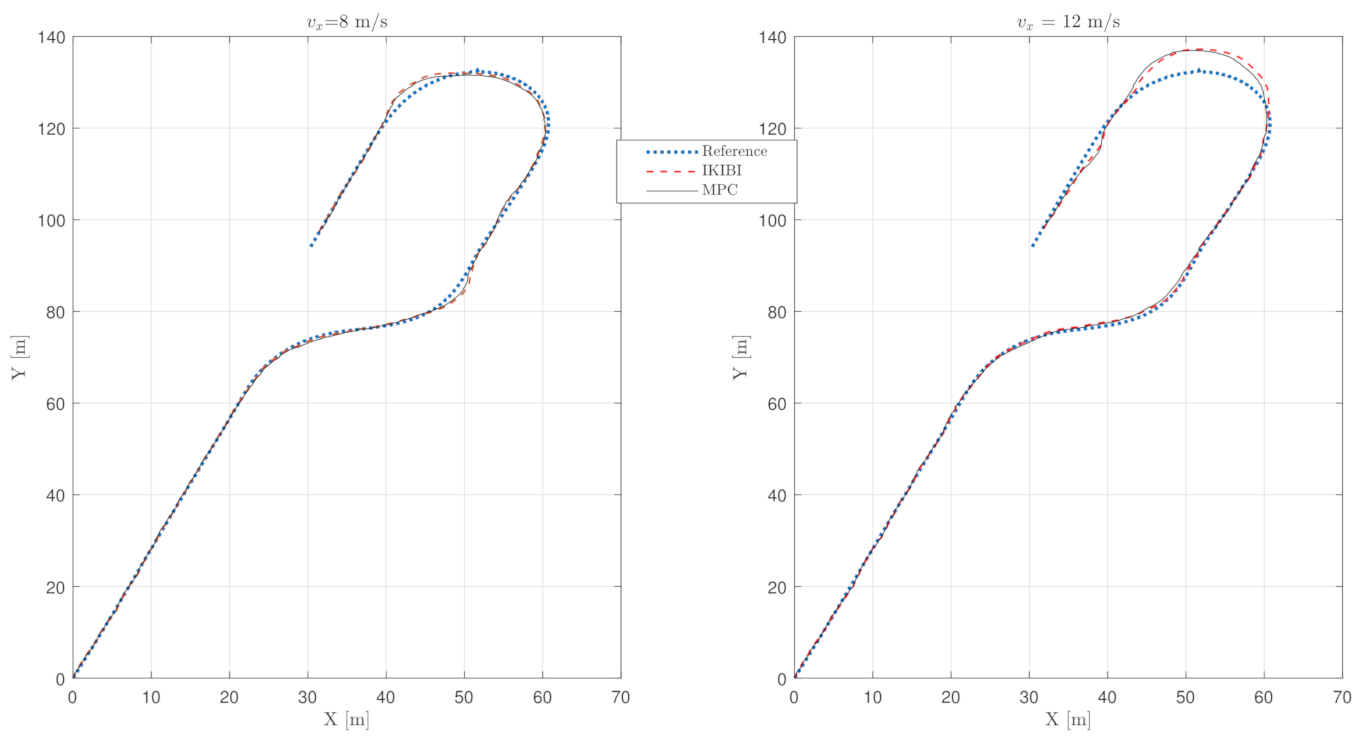
5.1. Noiseless, Fast Sensor Feedback Test
5.2. Fast Sensor Feedback Test with Noise Using EKF
5.3. Noiseless, Slow Sensor Feedback Test
5.4. Slow Sensor Feedback Test with Noise Using the DREKF
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| MPC | Model Predictive Control |
| IKIBI | Inverse Kinematics Bicycle |
| EKF | Extended Kalman Filter |
| AGV | Autonomous Ground Vehicle |
| LPV | Linear Parameter Varying |
| IMU | Inertial Measurement Unit |
| DOF | Degrees of Freedom |
Appendix A. Simulation Model
- m, the vehicle body mass.
- a and b, the distance of the front and rear wheels, respectively, from the normal projection point of vehicle’s CG onto the common axle plane.
- , the vehicle body moment of inertia about the vehicle-fixed z-axis.
- , cornering stiffness. This constant represents a linear approximation for the relationship between the slip angle, , and the lateral force, .
- , the wheel friction coefficient.
- h, the height of the vehicle’s center of gravity above the axle plane.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Constant | Value | Unit |
|---|---|---|
| m | 1800 | kg |
| a | 1.6 | m |
| b | 1.65 | m |
| 0.6 | - | |
| 0.6 | - | |
| 120 | kN/rad | |
| 110 | kN/rad | |
| h | 0.35 | m |
| 3270 |
References
- Haykin, S. Kalman Filtering and Neural Networks; Wiley Online Library: Hoboken, NJ, USA, 2001. [Google Scholar]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; University of North Carolina: Chapel Hill, NC, USA, 2006; Volume 378. [Google Scholar]
- Simon, D. Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Rajamani, R. Vehicle Dynamics and Control; Springer: New York, NY, USA, 2006. [Google Scholar] [CrossRef]
- Montemerlo, M.; Becker, J.; Bhat, S.; Dahlkamp, H.; Dolgov, D.; Ettinger, S.; Haehnel, D.; Hilden, T.; Hoffmann, G.; Huhnke, B.; et al. Junior: The Stanford Entry in the Urban Challenge. J. Field Robot. 2008, 25, 569–597. [Google Scholar] [CrossRef]
- Domina, A.; Tihanyi, V. Modelling the dynamic behavior of the steering system for low speed autonomous path tracking. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; pp. 535–540. [Google Scholar] [CrossRef]
- Kuwata, Y.; Teo, J.; Fiore, G.; Karaman, S.; Frazzoli, E.; How, J.P. Real-time motion planning with applications to autonomous urban driving. IEEE Trans. Control. Syst. Technol. 2009, 17, 1105–1118. [Google Scholar] [CrossRef]
- Kong, J.; Pfeiffer, M.; Schildbach, G.; Borrelli, F. Kinematic and dynamic vehicle models for autonomous driving control design. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Seoul, Korea, 28 June–1 July 2015; pp. 1094–1099. [Google Scholar] [CrossRef]
- Bakker, E.; Nyborg, L.; Pacejka, H. Tyre Modeling for Use in Vehicle Dynamics Studies; SAE Technical Paper 870421; SAE: Warrendale, PA, USA, 1987. [Google Scholar]
- Doumiati, M.; Victorino, A.; Charara, A.; Lechner, D. A method to estimate the lateral tire force and the sideslip angle of a vehicle: Experimental validation. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 6936–6942. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, W.; Tomizuka, M. Extended kalman filtering for robot joint angle estimation using mems inertial sensors. IFAC Proc. Vol. 2013, 46, 406–413. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Hesar, H.D.; Mohebbi, M. A Multi Rate Marginalized Particle Extended Kalman Filter for P and T Wave Segmentation in ECG Signals. IEEE J. Biomed. Health Inform. 2018, 23, 112–122. [Google Scholar] [CrossRef] [PubMed]
- Akhbari, M.; Shamsollahi, M.B.; Jutten, C. Twave alternans detection in ecg using Extended Kalman Filter and dualrate EKF. In Proceedings of the 2014 22nd European Signal Processing Conference (EUSIPCO), Lisbon, Portugal, 1–5 September 2014; pp. 2500–2504. [Google Scholar]
- Grillo, C.; Vitrano, F. State estimation of a nonlinear unmanned aerial vehicle model using an Extended Kalman Filter. In Proceedings of the 15th AIAA International Space Planes and Hypersonic Systems and Technologies Conference, Dayton, OH, USA, 28 April–1 May 2008; p. 2529. [Google Scholar]
- Armesto, L.; Tornero, J.; Vincze, M. Fast ego-motion estimation with multi-rate fusion of inertial and vision. Int. J. Robot. Res. 2007, 26, 577–589. [Google Scholar] [CrossRef]
- Armesto, L.; Tornero, J. SLAM based on Kalman filter for multi-rate fusion of laser and encoder measurements. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No. 04CH37566), Sendai, Japan, 28 September–2 October 2004; Volume 2, pp. 1860–1865. [Google Scholar]
- Paden, B.; Čáp, M.; Yong, S.Z.; Yershov, D.; Frazzoli, E. A survey of motion planning and control techniques for self-driving urban vehicles. IEEE Trans. Intell. Veh. 2016, 1, 33–55. [Google Scholar] [CrossRef]
- Ljungqvist, O. Motion Planning and Stabilization for a Reversing Truck and Trailer System. Master’s Thesis, Linköping University, Linköping, Sweden, 2015. [Google Scholar]
- Borrelli, F.; Falcone, P.; Keviczky, T.; Asgari, J.; Hrovat, D. MPC–based approach to active steering for autonomous vehicle systems. Int. J. Veh. Auton. Syst. 2005, 3, 265–291. [Google Scholar] [CrossRef]
- Carvalho, A.; Gao, Y.; Gray, A.; Tseng, E.; Borrelli, F. Predictive control of an autonomous ground vehicle using an iterative linearization approach. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, The Hague, The Netherlands, 6–9 October 2013; pp. 2335–2340. [Google Scholar] [CrossRef]
- García, C.; Prett, D.; Morari, M. Model Predictive Control: Theory and Practice-a Survey. Automatica 1989, 25, 335–348. [Google Scholar] [CrossRef]
- Mayne, D.; Rawlings, J.; Rao, C.; Scokaert, P. Constrained Model Predictive Control: Stability and Optimality. Automatica 2000, 36, 789–814. [Google Scholar] [CrossRef]
- Besselmann, T.; Morari, M. Autonomous vehicle steering using explicit LPV-MPC. In Proceedings of the 2009 European Control Conference (ECC), Budapest, Hungary, 23–26 August 2009; pp. 2628–2633. [Google Scholar]
- Alcalá, E.; Puig, V.; Quevedo, J. LPV-MPC control for autonomous vehicles. IFAC-PapersOnLine 2019, 52, 106–113. [Google Scholar] [CrossRef]
- Johansson, R. Model-Based Predictive and Adaptive Control; KFS Studentbokhandel: Lund, Sweden, 2020. [Google Scholar]
- Cerone, V.; Piga, D.; Regruto, D. Set-membership LPV model identification of vehicle lateral dynamics. Automatica 2011, 47, 1794–1799. [Google Scholar] [CrossRef]
- Jain, V.; Kolbe, U.; Breuel, G.; Stiller, C. Reacting to Multi-Obstacle Emergency Scenarios Using Linear Time Varying Model Predictive Control. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; pp. 1822–1829. [Google Scholar] [CrossRef]
- Keviczky, T.; Balas, G. Software-Enabled Receding Horizon Control for Autonomous Unmanned Aerial Vehicle Guidance. J. Guid. Control. Dyn. 2006, 29, 680–694. [Google Scholar] [CrossRef][Green Version]
- Farag Saeed Ramadan, A.; Sayed, A.; Shehata, O.; Garcia, F.; Tadjine, H.; Matthes, E. Dynamics Platooning Model and Protocols for Self-Driving Vehicles. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; pp. 1974–1980. [Google Scholar] [CrossRef]
- Salt Ducaju, J.M.; Tang, C.; Chan, C.Y.; Tomizuka, M. Application Specific System Identification for Model-Based Control in Self-Driving Cars. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October–13 November 2020. [Google Scholar]
- Abbeel, P.; Ganapathi, V.; Ng, A. Learning vehicular dynamics, with application to modeling helicopters. Adv. Neural Inf. Process. Syst. 2005, 18, 1–8. [Google Scholar]
- Coulter, R.C. Implementation of the Pure Pursuit Path Tracking Algorithm; Technical Report; Carnegie-Mellon UNIV Pittsburgh PA Robotics INST: Pittsburgh, PA, USA, 1992. [Google Scholar]
- Buehler, M.; Iagnemma, K.; Singh, S. The DARPA Urban Challenge: Autonomous Vehicles in City Traffic; Springer: New York, NY, USA, 2009; Volume 56. [Google Scholar]
- Falcone, P.; Borrelli, F.; Asgari, J.; Tseng, E.; Hrovat, D. Predictive Active Steering Control for Autonomous Vehicle Systems. IEEE Trans. Control. Syst. Technol. 2007, 15, 566–580. [Google Scholar] [CrossRef]
- Yan, Y.; Wang, J.; Zhang, K.; Mingcong, C.; Chen, J. Path Planning using a Kinematic Driver-Vehicle-Road Model with Consideration of Driver’s Characteristics. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; pp. 2259–2264. [Google Scholar] [CrossRef]
- Boyd, S.; Boyd, S.P.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Mattingley, J.; Boyd, S. CVXGEN: A Code Generator for Embedded Convex Optimization. Optim. Eng. 2012, 12, 1–27. [Google Scholar] [CrossRef]
- Gillespie, T.D. Fundamentals of Vehicle Dynamics; Society of Automotive Engineers (SAE): Warrendale, PA, USA, 1992; Volume 400. [Google Scholar]








| Controller | m/s | m/s | ||
|---|---|---|---|---|
| (m) | (m) | (m) | (m) | |
| IKIBI | 492.13 | 0.9 | 2090.2 | 5.15 |
| IKIBI saturated | 667.3 | 1.88 | 3036.1 | 8.39 |
| MPC | 561 | 1.67 | 1817.2 | 6.5 |
| Controller | m/s | m/s | ||
|---|---|---|---|---|
| (m) | (m) | (m) | (m) | |
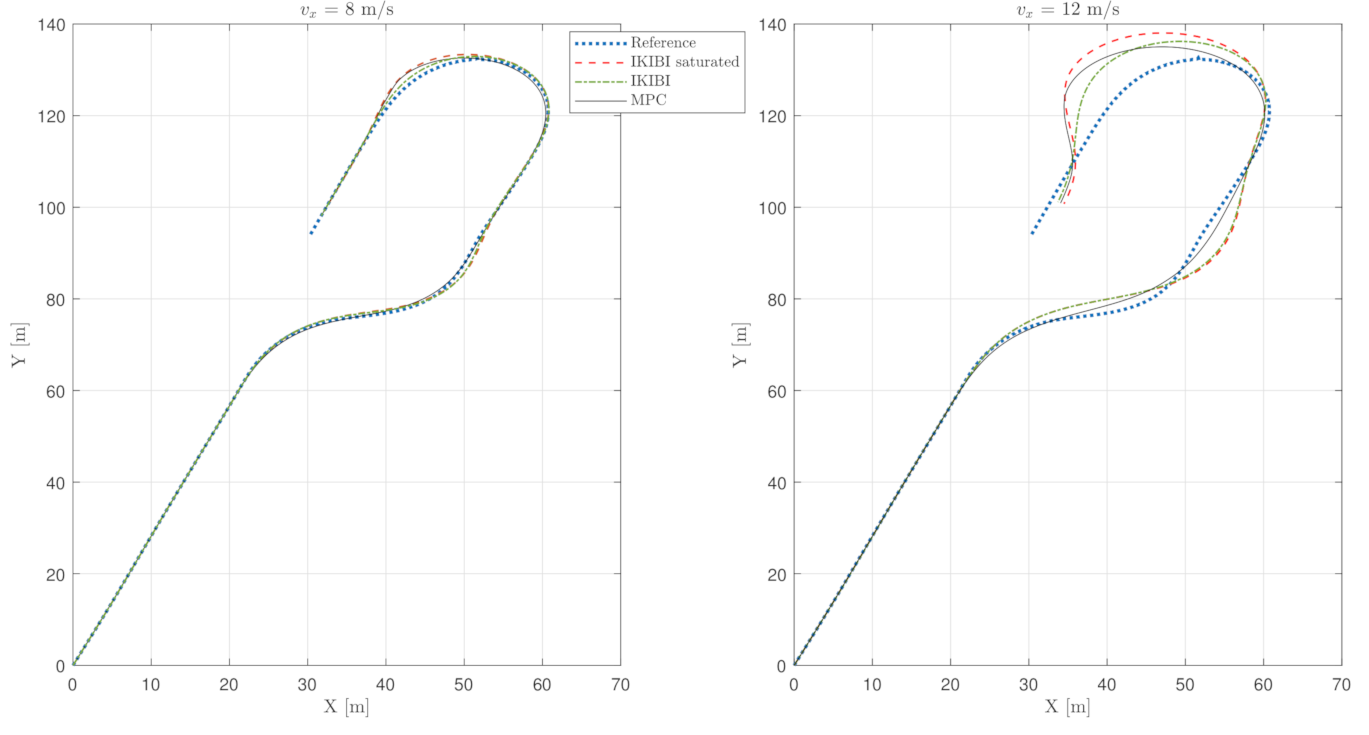
| IKIBI saturated | 999.4 | 3.42 | 3660.9 | 10.77 |
| MPC | 834.3 | 2.63 | 1269.5 | 4.54 |
| Controller | m/s | m/s | ||
|---|---|---|---|---|
| (m) | (m) | (m) | (m) | |
| IKIBI saturated | 800.9 | 1.91 | 3039.8 | 7.49 |
| MPC | 613.8 | 1.69 | 2026.6 | 6.86 |
| Controller | m/s | m/s | ||
|---|---|---|---|---|
| (m) | (m) | (m) | (m) | |
| IKIBI saturated | 764.76 | 1.58 | 1057.3 | 4.67 |
| MPC | 738 | 1.3 | 1040.2 | 4.75 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Salt Ducajú, J.M.; Salt Llobregat, J.J.; Cuenca, Á.; Tomizuka, M. Autonomous Ground Vehicle Lane-Keeping LPV Model-Based Control: Dual-Rate State Estimation and Comparison of Different Real-Time Control Strategies. Sensors 2021, 21, 1531. https://doi.org/10.3390/s21041531
Salt Ducajú JM, Salt Llobregat JJ, Cuenca Á, Tomizuka M. Autonomous Ground Vehicle Lane-Keeping LPV Model-Based Control: Dual-Rate State Estimation and Comparison of Different Real-Time Control Strategies. Sensors. 2021; 21(4):1531. https://doi.org/10.3390/s21041531
Chicago/Turabian StyleSalt Ducajú, Julián M., Julián J. Salt Llobregat, Ángel Cuenca, and Masayoshi Tomizuka. 2021. "Autonomous Ground Vehicle Lane-Keeping LPV Model-Based Control: Dual-Rate State Estimation and Comparison of Different Real-Time Control Strategies" Sensors 21, no. 4: 1531. https://doi.org/10.3390/s21041531
APA StyleSalt Ducajú, J. M., Salt Llobregat, J. J., Cuenca, Á., & Tomizuka, M. (2021). Autonomous Ground Vehicle Lane-Keeping LPV Model-Based Control: Dual-Rate State Estimation and Comparison of Different Real-Time Control Strategies. Sensors, 21(4), 1531. https://doi.org/10.3390/s21041531