
Online 3-Dimensional Path Planning with Kinematic Constraints in Unknown Environments Using Hybrid A* with Tree Pruning

 ,
,  ,
,  , and
, and 
Abstract
1. Introduction
1.1. Related Work
1.2. Statement of Contributions
- Extending HA* for robots operating in . The approach is focused on AUVs and includes domain-related constraints.
- Improved HA* operation in unexplored environments by applying a tree pruning procedure which maintains a valid search tree that can be reused when replanning is needed.
- Our proposed approach shows improved results in known environments regarding planning time, success rate and path length (quality of solution) compared to state-lattice A*, RRT and RRT* with Dubins curves.
- For unexplored environments, we show a consistent reduction in planning time by using the tree pruning procedure compared to discarding the tree and planning from scratch.
2. Hybrid-A* for the Underwater Domain
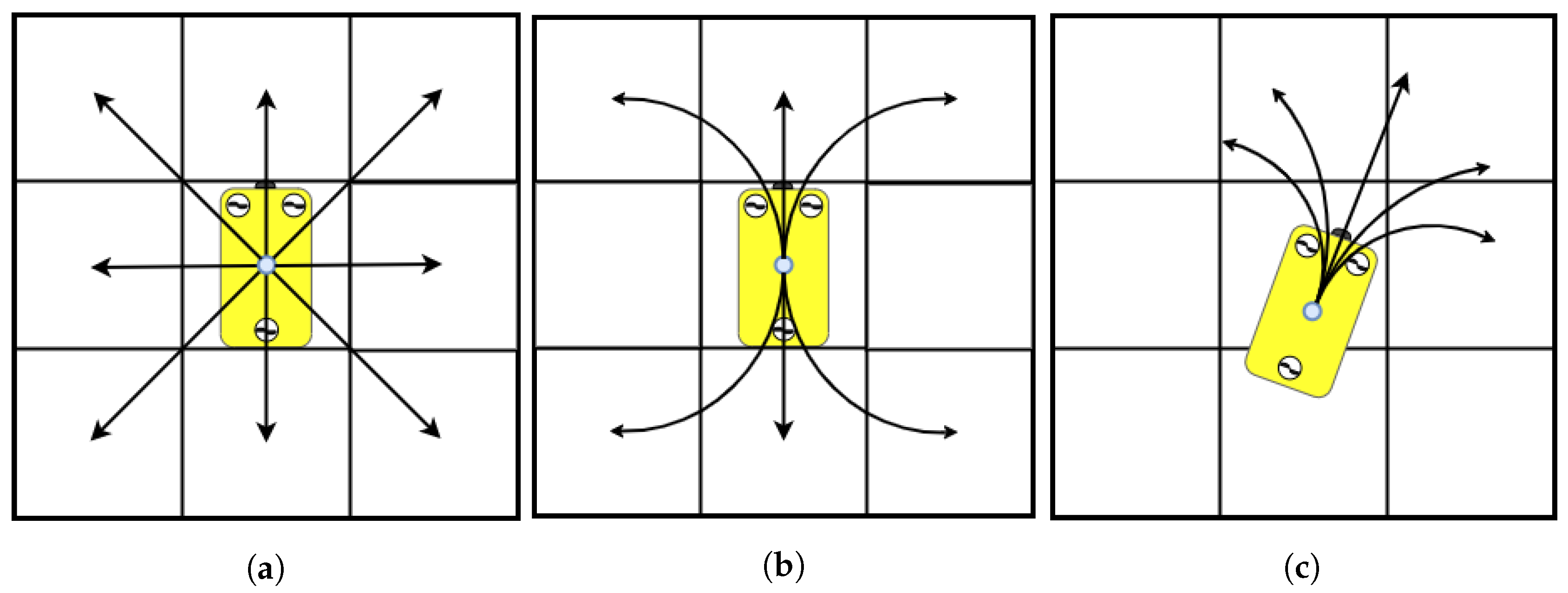
2.1. Hybrid-A*
| Algorithm 1 Hybrid A* |
Input: : Start and goal configuration grid : Grid : Obstacles
|
2.2. Hybrid-A* in the Underwater Domain
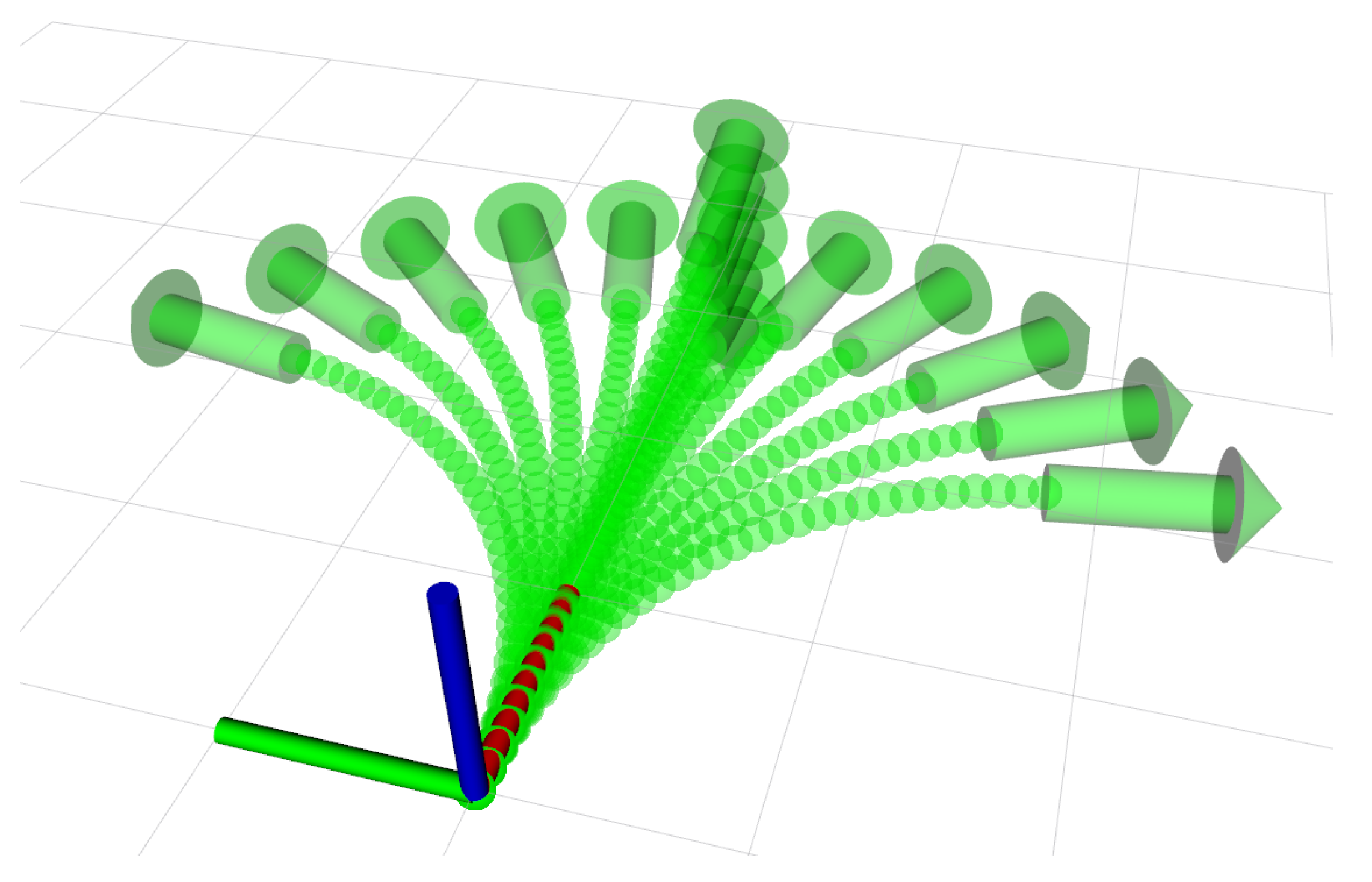
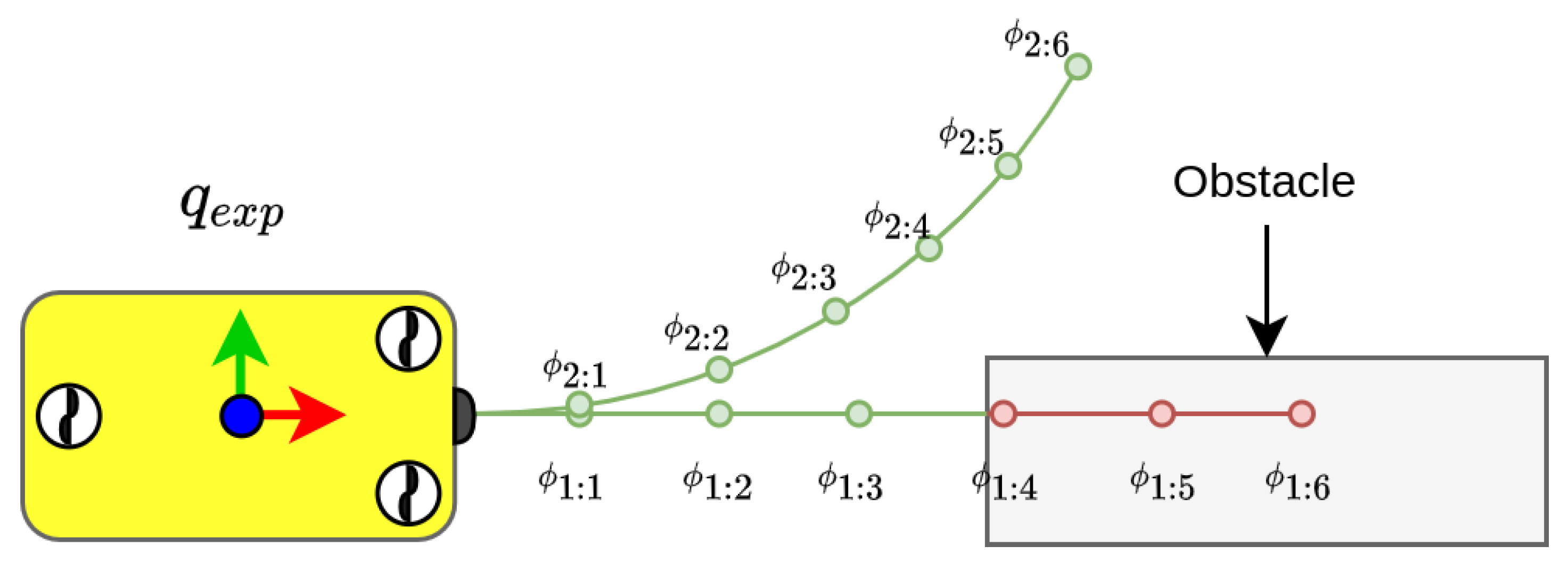
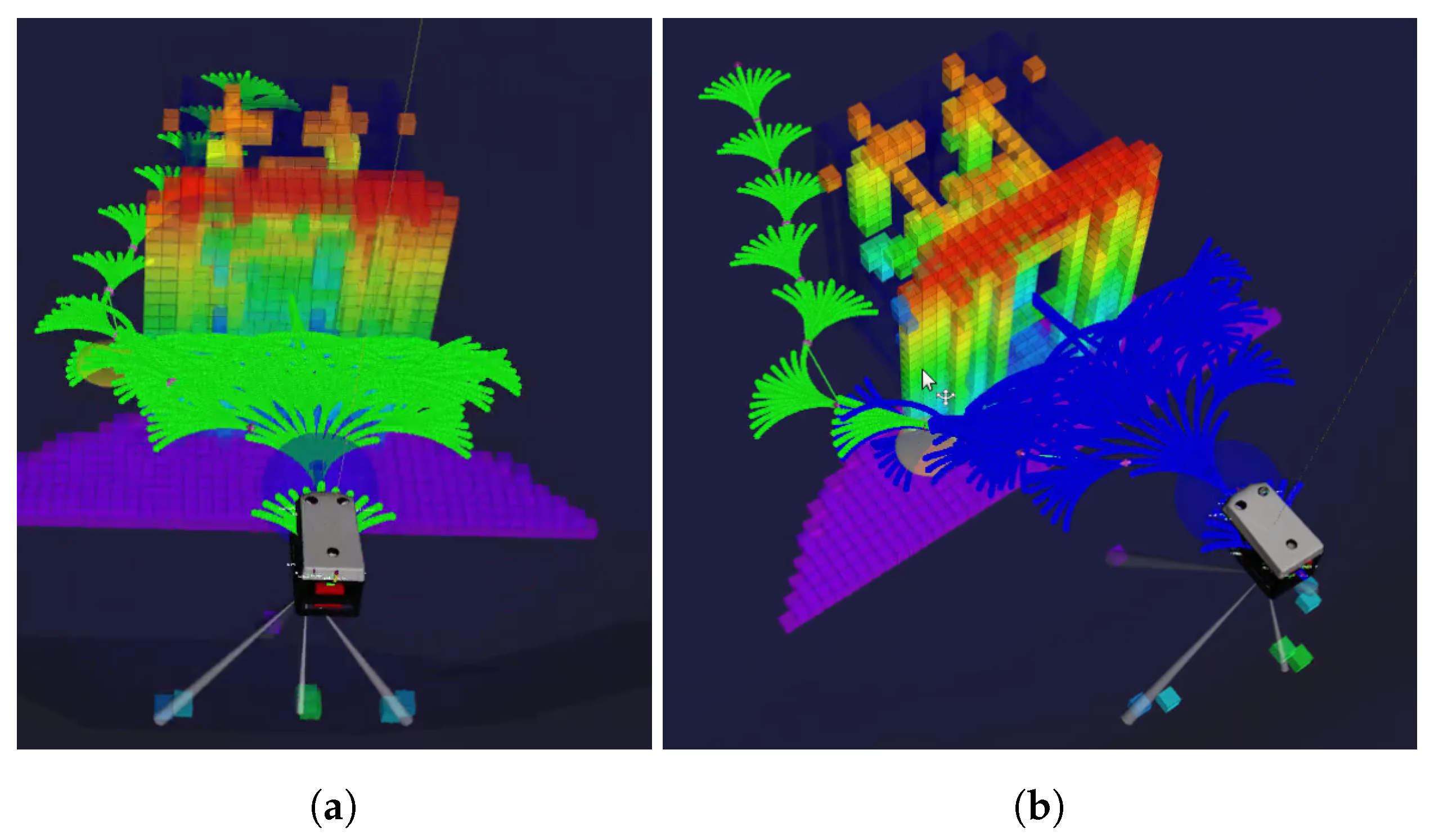
2.2.1. Expansion of a State Using Motion Primitives
2.2.2. Binary Search for a Lower Cost Motion Primitive
| Algorithm 2 BinarySearch |
Input: : Set of branches m : iterations
|
2.2.3. Priority of Expansion
2.2.4. Expanding the Tree with a State
- : As could have a slight difference from the ones already occupying the cell which might lead to a better solution the algorithm will allow to be added to the search tree.
- : : The state is discarded as it is likely to lead to a worse solution.
- : The new state finds a shorter path to . We can however not change the parent as in A* or Dijkstra’s as this might not comply with the motion constraints of the robot and instead is added to the tree, and the new cost of the cell will now be as this is the lowest cost of a state in the cell’s list.
3. Improved Replanning by Tree Pruning
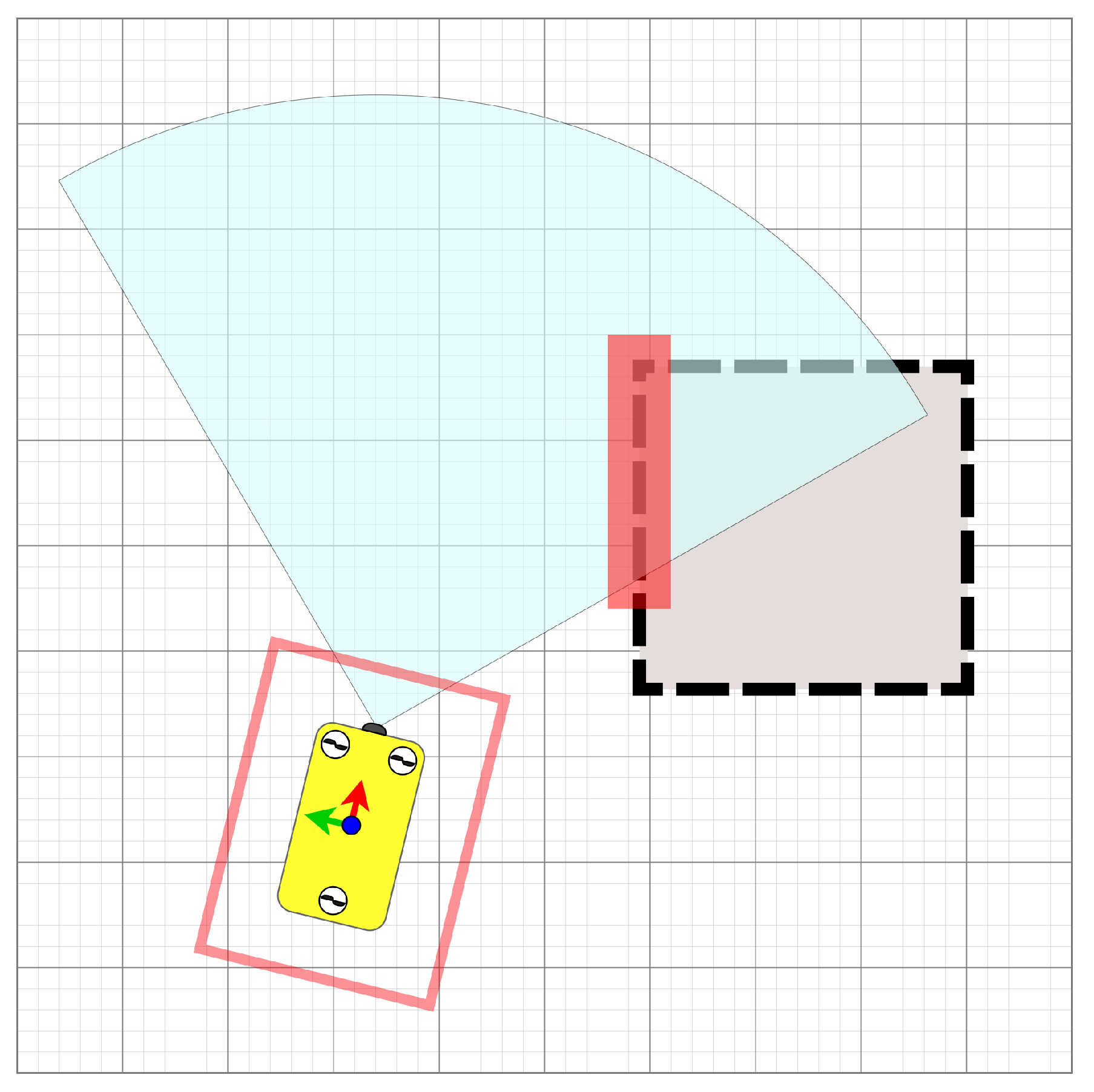
3.1. Online Mapping and Collision Detection
3.2. Tree Pruning
| Algorithm 3 PruneTree |
Input: q : State : Obstacles
|
4. Tests and Evaluation
4.1. Comparison in Known Environments
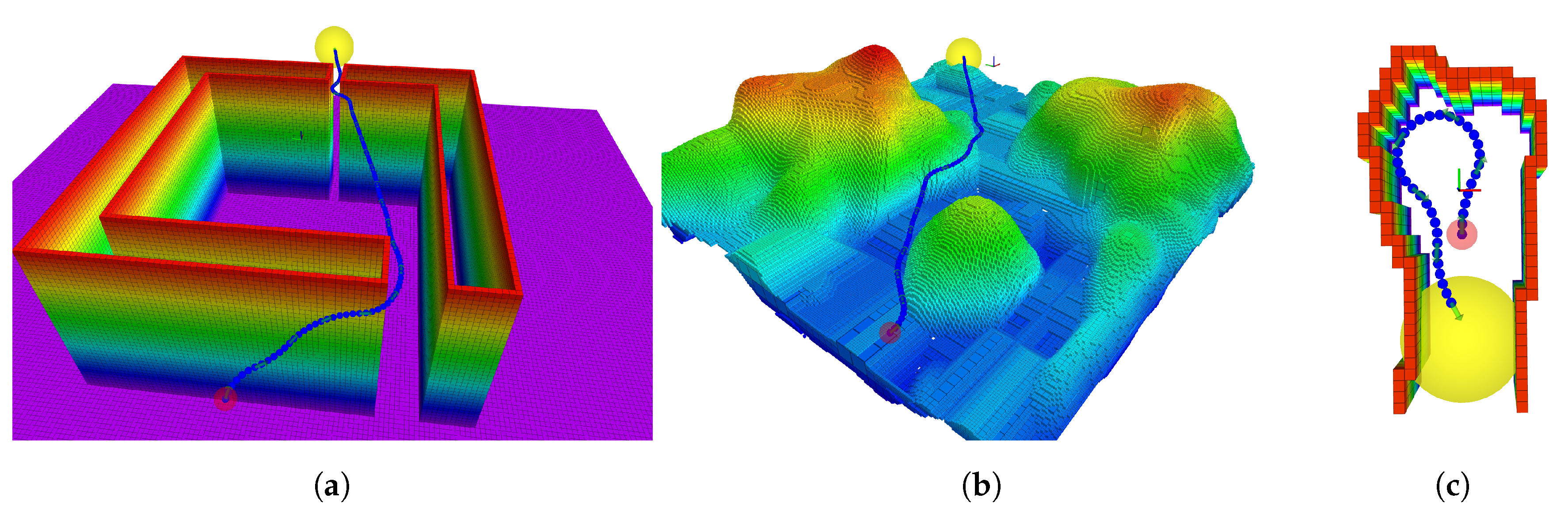
4.1.1. Scenario 1: Gap
4.1.2. Scenario 2: Canyon
4.1.3. Scenario 3: Cave, Dead-End
4.1.4. Known Environment—Results
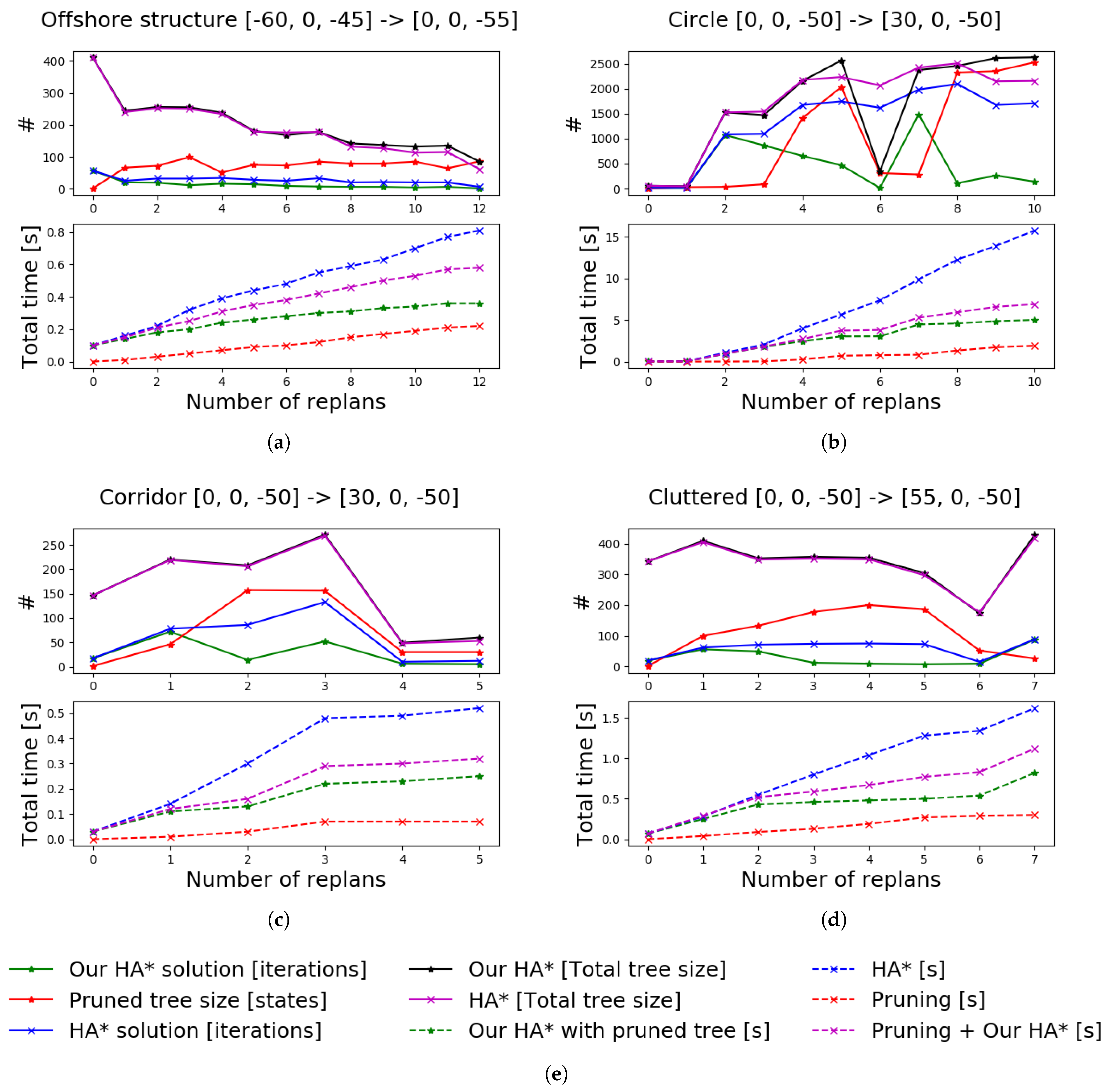
4.2. Comparison in Unknown Environments Using Tree Pruning
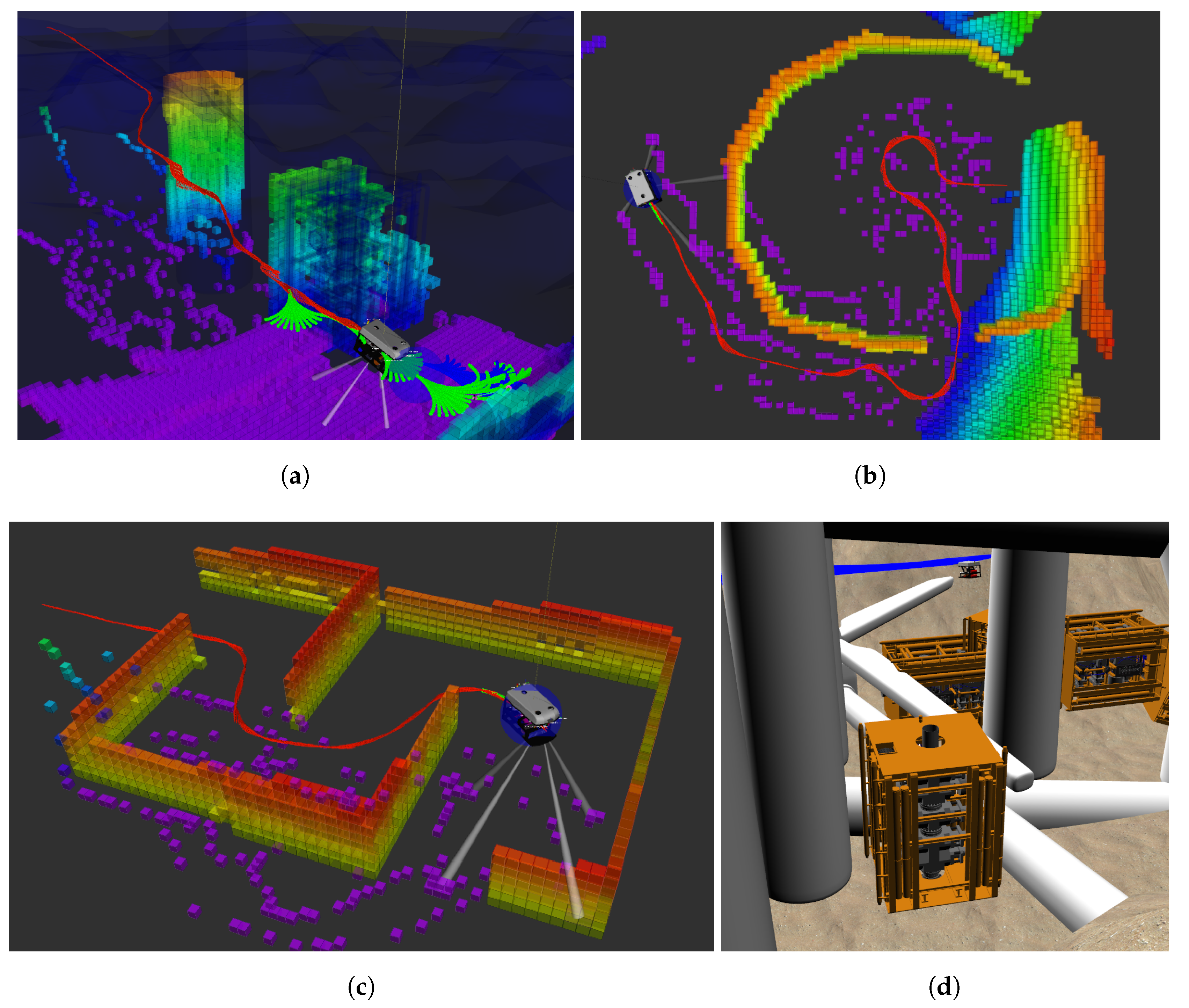
- Scenario 1: Offshore structures
- Scenario 2: Circle/Narrow ExitThe second scenario (see Figure 8b) is a circular structure with an exit. The robot starts from the inside of the structure and the goal region is on the outside. As such, it will first move straight towards the goal until it finds out that the path is blocked. The set of motion primitives is used without vertical movement in this scenario.
- Scenario 3: CorridorThe third scenario (see Figure 8c) is navigating through a corridor, where walls partially blocking the inner passage need to be circumnavigated. The set of motion primitives is used without vertical movement in this scenario.
- Scenario 4: Offshore Incident/ClutteredThe last scenario (see Figure 8d) is a cluttered environment, modelled as an offshore incident with wind turbines which have fallen over next to other offshore structures.
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ADA* | anytime dynamic A* |
| AUV | autonomous underwater vehicle |
| C-Space | configuration space |
| DVL | doppler velocity log |
| DWA | dynamic window approach |
| D* | dynamic A* |
| EST | expansive space trees |
| GA | genetic algorithm |
| HA* | hybrid A* |
| PRM | probabilistic roadmap |
| ROS | robot operating system |
| ROV | remotely operated vehicle |
| RRT | rapid-exploring random tree |
| RRT* | asymptotic optimal RRT |
| FCL | Flexible Collision Library |
| SLAM | simultaneous localisation and mapping |
| SST | stable sparse-RRT |
References
- Robb, D.; Lopes, J.; Padilla, S.; Laskov, A.; Garcia, F.J.C.; Liu, X.; Willners, J.S.; Valeyrie, N.; Lohan, K.; Lane, D.; et al. Exploring Interaction with Remote Autonomous Systems using Conversational Agents. In Proceedings of the DIS 2019—2019 ACM Designing Interactive Systems Conference, Diego, CA, USA, 23–28 June 2019; pp. 1543–1556. [Google Scholar]
- Sato, Y.; Maki, T.; Masuda, K.; Matsuda, T.; Sakamaki, T. Autonomous docking of hovering type AUV to seafloor charging station based on acoustic and visual sensing. In Proceedings of the 2017 IEEE OES International Symposium on Underwater Technology (UT 2017), Busan, Korea, 21–24 February 2017; pp. 1–6. [Google Scholar]
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Lozano-Pérez, T. Spatial Planning: A Configuration Space Approach. IEEE Trans. Comput. 1983, C-32, 108–120. [Google Scholar]
- Dijkstra, E. A Note on Two Problems in Connection with Graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Tanakitkorn, K.; Wilson, P.A.; Turnock, S.R.; Phillips, A.B. Grid-based GA path planning with improved cost function for an over-actuated hover-capable AUV. In Proceedings of the IEEE/OES Autonomous Underwater Vehicles, Oxford, MS, USA, 6–9 October 2014. [Google Scholar]
- Kavraki, L.E.; Svestka, P.; Latombe, J.C.; Overmars, M.H. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Trans. Robot. Autom. 1996, 12, 566–580. [Google Scholar] [CrossRef]
- LaValle, S.M.; Kuffner, J.J. Randomized kinodynamic planning. Int. J. Robot. Res. 2001, 20, 378–400. [Google Scholar] [CrossRef]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Yan, Z.; Zhao, Y.; Chen, T.; Deng, C. 3D path planning for AUV based on circle searching. In Proceedings of the OCEANS 2012 MTS/IEEE: Harnessing the Power of the Ocean, Hampton Roads, VA, USA, 14–19 October 2012. [Google Scholar]
- Pivtoraiko, M.; Kelly, A. Generating near minimal spanning control sets for constrained motion planning in discrete state spaces. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Edmonton, AB, Canada, 2–6 August 2005; pp. 594–600. [Google Scholar]
- Dolgov, D.; Thrun, S.; Montemerlo, M.; Diebel, J. Practical search techniques in path planning for autonomous driving. Int. Symp. Comb. Search SoCS 2008, 1001, 18–80. [Google Scholar]
- Hsu, D. Randomized Single-query Motion Planning in Expansive Spaces. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 2000. [Google Scholar]
- Phillips, J.M.; Bedrossian, N.; Kavraki, L.E. Guided expansive spaces trees: A search strategy for motion- and cost-constrained state spaces. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004. [Google Scholar]
- Dubins, L.E. On Curves of Minimal Length with a Constraint on Average Curvature, and with Prescribed Initial and Terminal Positions and Tangents. Am. J. Math. 1957, 79, 497–516. [Google Scholar] [CrossRef]
- Hernández, J.D.; Vidal, E.; Moll, M.; Palomeras, N.; Carreras, M.; Kavraki, L.E. Online motion planning for unexplored underwater environments using autonomous underwater vehicles. J. Field Robot. 2019, 36, 370–396. [Google Scholar] [CrossRef]
- Pairet, È.; Hernández, J.D.; Lahijanian, M.; Carreras, M. Uncertainty-based Online Mapping and Motion Planning for Marine Robotics Guidance. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018; pp. 2367–2374. [Google Scholar]
- Vidal, E.; Moll, M.; Palomeras, N.; Hernández, J.D.; Carreras, M.; Kavraki, L.E. Online multilayered motion planning with dynamic constraints for autonomous underwater vehicles. In Proceedings of the IEEE International Conference on Robotics and Automation, Montreal, QC, Canada, 20–24 May 2019; pp. 8936–8942. [Google Scholar]
- Pairet, È.; Hernández, J.D.; Petillot, Y.; Lahijanian, M. Online Mapping and Motion Planning under Uncertainty for Safe Navigation in Unknown Environments. arXiv 2020, arXiv:2004.12317. [Google Scholar]
- Jian, X.; Zou, T.; Vardy, A.; Bose, N. A hybrid path planning strategy of autonomous underwater vehicles. In Proceedings of the IEEE/OES Autonomous Underwater Vehicles Symposium, St. Johns, NL, Canada, 30 September–2 October 2020. [Google Scholar]
- Ferguson, D.; Stentz, A. Field D*: An interpolation-based path planner and replanner. Springer Tracts Adv. Robot. 2007, 28, 239–253. [Google Scholar]
- Koenig, S.; Maxim Likhachev, M. Fast replanning for navigation in unknown terrain. IEEE Trans. Robot. 2005, 21, 354–363. [Google Scholar] [CrossRef]
- Likhachev, M.; Ferguson, D.; Gordon, G.; Stentz, A.; Thrun, S. Anytime dynamic a*: An anytime, replanning algorithm. In Proceedings of the 15th International Conference on Automated Planning and Scheduling, Monterey, CA, USA, 5–10 June 2005; pp. 262–271. [Google Scholar]
- Petereit, J.; Emter, T.; Frey, C.; Kopfstedt, T.; Beutel, A. Application of Hybrid A* to an Autonomous Mobile Robot for Path Planning in Unstructured Outdoor Environments. In Proceedings of the ROBOTIK 2012—7th German Conference on Robotics, Munich, Germany, 21–22 May 2012; pp. 227–232. [Google Scholar]
- Dolgov, D.; Thrun, S.; Montemerlo, M.; Diebel, J. Path planning for autonomous vehicles in unknown semi-structured environments. Int. J. Robot. Res. 2010, 29, 485–501. [Google Scholar] [CrossRef]
- Heo, Y.J.; Chung, W.K. RRT-based path planning with kinematic constraints of AUV in underwater structured environment. In Proceedings of the 2013 10th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI 2013), Jeju, Korea, 30 October–2 November 2013; pp. 523–525. [Google Scholar]
- Hernandez, J.D.; Vidal, E.; Vallicrosa, G.; Galceran, E.; Carreras, M. Online path planning for autonomous underwater vehicles in unknown environments. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 1152–1157. [Google Scholar]
- Petillot, Y.; Ruiz, I.; Lane, D. Underwater vehicle obstacle avoidance and path planning using a multi-beam forward looking sonar. IEEE J. Ocean. Eng. 2001, 26, 240–251. [Google Scholar] [CrossRef]
- Stentz, A. Optimal and efficient path planning for unknown and dynamic environments. Int. J. Robot. Autom. 1994, 10, 89–100. [Google Scholar]
- Bekris, K.E.; Kavraki, L.E. Greedy but safe replanning under kinodynamic constraints. In Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 704–710. [Google Scholar]
- Ferguson, D.; Kalra, N.; Stentz, A. Replanning with RRTs. In Proceedings of the IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006. [Google Scholar]
- Hernández, J.D.; Moll, M.; Vidal, E.; Carreras, M.; Kavraki, L.E. Planning feasible and safe paths online for autonomous underwater vehicles in unknown environments. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Daejeon, Korea, 9–14 October 2016; Volume 4, pp. 214–221. [Google Scholar]
- Carreras, M.; Candela, C.; Ribas, D.; Palomeras, N.; Magií, L.; Mallios, A.; Vidal, E.; Pairet, È.; Ridao, P. Testing SPARUS II AUV, an Open Platform for Industrial, Scientific and Academic Applications; Instrumentation Viewpoint: Canary Islands, Spain, 2015. [Google Scholar]
- Carreras, M.; Hernández, J.D.; Vidal, E.; Palomeras, N.; Ribas, D.; Ridao, P. Sparus II AUV—A Hovering Vehicle for Seabed Inspection. IEEE J. Ocean. Eng. 2018, 43, 344–355. [Google Scholar] [CrossRef]
- Ribas, D.; Palomeras, N.; Ridao, P.; Carreras, M.; Mallios, A. Girona 500 AUV: From survey to intervention. IEEE/ASME Trans. Mechatron. 2011, 17, 46–53. [Google Scholar] [CrossRef]
- Russell, S.; Norvig, P. Artificial Intelligence: A Modern Approach, 3rd ed.; Prentice Hall Press: Upper Saddle River, NJ, USA, 2009. [Google Scholar]
- Pearl, J. Heuristics: Intelligent Search Strategies for Computer Problem Solving; Addison-Wesley Longman Publishing Co. Inc.: Boston, MA, USA, 1984. [Google Scholar]
- Sucan, I.A.; Moll, M.; Kavraki, L.E. The Open Motion Planning Library. IEEE Robot. Autom. Mag. 2012, 19, 72–82. [Google Scholar] [CrossRef]
- Durrant-Whyte, H.; Bailey, T. Simultaneous localization and mapping (SLAM): Part I The Essential Algorithms. Robot. Autom. Mag. 2006, 2, 99–110. [Google Scholar] [CrossRef]
- Hornung, A.; Wurm, K.M.; Bennewitz, M.; Stachniss, C.; Burgard, W. OctoMap: An efficient probabilistic 3D mapping framework based on octrees. Auton. Robot. 2013, 34, 189–206. [Google Scholar] [CrossRef]
- Pan, J.; Chitta, S.; Manocha, D. FCL: A general purpose library for collision and proximity queries. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 3859–3866. [Google Scholar]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS : An open-source Robot Operating System. IEEE Robot. Autom. 2009, 15, 19. [Google Scholar]
- Manhães, M.M.M.; Scherer, S.A.; Voss, M.; Douat, L.R.; Rauschenbach, T. UUV Simulator: A Gazebo-based package for underwater intervention and multi-robot simulation. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016. [Google Scholar]
- Cerqueira, R.; Trocoli, T.; Neves, G.; Joyeux, S.; Albiez, J.; Oliveira, L. A novel GPU-based sonar simulator for real-time applications. Comput. Graph. 2017, 68, 66–76. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Reference | C-Space | Kinematic Constraints | Online | Replanning | AUV |
|---|---|---|---|---|---|---|
| Search-based | ||||||
| Field-D*/D*-lite | [22,23] | No | Yes | Yes | No | |
| anytime dynamic A* | [24] | No | Yes | Yes | No | |
| HA* | [13,25,26] | Yes | Yes | No | No | |
| State-Lattice A* | [12] | Yes | Yes | No | No | |
| A* | [11] | SE(3) | Yes | No | No | Yes |
| HA* | This paper | SE(3) | Yes | Yes | Yes | Yes |
| Sampling-based | ||||||
| RRT | [27] | Yes | Yes | No | Yes | |
| RRT* | [28] | Yes | Yes | Yes | Yes | |
| RRT* | [17] | SE(3) | Yes | Yes | Yes | Yes |
| SST | [18] | Yes | Yes | No | Yes | |
| RRT*+SST | [19] | Yes | Yes | No | Yes | |
| RRT*+SST | [20] | SE(3) | Yes | Yes | No | Yes |
| RRT*+DWA | [21] | SE(2) | Yes | Yes | No | Yes |
| Other | ||||||
| Non-Lin. Prog. | [29] | Yes | Yes | No | Yes | |
| GA | [7] | No | No | No | Yes | |
| Solution Length [m] | |||||||
|---|---|---|---|---|---|---|---|
| # | Method | Planning Time [s] | Mean | Median | Min | Max | Success Rate |
| Scenario 1: Gap | |||||||
| 1.1 | HA* | 0.147 | 66.00 | - | - | - | 1.0 |
| 1.2 | State-Lattice A* | 0.450589 | 92.5619 | - | - | - | 1.0 |
| 1.3 | RRT* | 0.147 | 99.70 | 99.38 | 70.48 | 119.35 | 0.953 |
| 1.4 | RRT | 0.019 | 135.54 | 130.43 | 85.15 | 248.93 | 1.0 |
| 1.5 | RRT* | 0.02 | 135.54 | 131.13 | 80.34 | 243.22 | 1.0 |
| 1.6 | RRT* | 0.147 | 77.81 | 75.36 | 67.15 | 102.61 | 0.089 |
| 1.7 | RRT | 0.147 | 134.71 | 130.98 | 69.57 | 270.03 | 0.511 |
| 1.8 | RRT* | 0.30 | 77.12 | 74.84 | 67.62 | 101.70 | 0.177 |
| 1.9 | RRT* | 1.00 | 76.10 | 73.33 | 66.88 | 91.90 | 0.383 |
| 1.10 | RRT | 0.12 | 133.79 | 129.79 | 70.20 | 231.84 | 0.464 |
| 1.11 | RRT | 0.26 | 142.98 | 139.87 | 69.26 | 280.85 | 1.0 |
| Scenario 2: Canyon | |||||||
| 2.1 | HA* | 0.009459 | 63.00 | - | - | - | 1.0 |
| 2.2 | State-Lattice A* | 0.013214 | 69.84 | - | - | - | 1.0 |
| # | Method | Planning Time [s] | Mean | Median | Min | Max | Success Rate |
| 2.3 | RRT* | 0.009459 | 81.04 | 73.73 | 62.71 | 123.32 | 0.106 |
| 2.4 | RRT | 0.009459 | 111.75 | 108.50 | 64.28 | 249.34 | 0.429 |
| 2.5 | RRT | 0.01387 | 122.94 | 119.05 | 64.617 | 245.57 | 1.0 |
| 2.6 | RRT* | 0.20 | 79.45 | 72.12 | 63.44 | 118.83 | 0.989 |
| Scenario 3: Cave (Dead-end) | |||||||
| 3.1 | HA* | 0.004985 | 18.00 | - | - | - | 1.0 |
| 3.2 | State-Lattice A* | No Solution | No Solution | - | - | - | 0.0 |
| 3.3 | RRT* | 0.005 | 19.17 | 19.17 | 19.17 | 19.17 | 0.001 |
| 3.4 | RRT* | 0.01 | 18.99 | 19.05 | 18.27 | 19.53 | 0.01 |
| 3.5 | RRT* | 0.02 | 18.90 | 18.76 | 17.56 | 21.55 | 0.067 |
| 3.6 | RRT* | 0.10 | 19.22 | 19.17 | 17.56 | 22.78 | 0.978 |
| 3.7 | RRT | 0.005 | 19.01 | 19.00 | 18.64 | 19.53 | 0.005 |
| 3.8 | RRT | 0.02 | 19.29 | 19.17 | 17.68 | 22.61 | 0.106 |
| 3.9 | RRT | 0.035 | 19.50 | 19.36 | 17.52 | 31.45 | 1.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Scharff Willners, J.; Gonzalez-Adell, D.; Hernández, J.D.; Pairet, È.; Petillot, Y. Online 3-Dimensional Path Planning with Kinematic Constraints in Unknown Environments Using Hybrid A* with Tree Pruning. Sensors 2021, 21, 1152. https://doi.org/10.3390/s21041152
Scharff Willners J, Gonzalez-Adell D, Hernández JD, Pairet È, Petillot Y. Online 3-Dimensional Path Planning with Kinematic Constraints in Unknown Environments Using Hybrid A* with Tree Pruning. Sensors. 2021; 21(4):1152. https://doi.org/10.3390/s21041152
Chicago/Turabian StyleScharff Willners, Jonatan, Daniel Gonzalez-Adell, Juan David Hernández, Èric Pairet, and Yvan Petillot. 2021. "Online 3-Dimensional Path Planning with Kinematic Constraints in Unknown Environments Using Hybrid A* with Tree Pruning" Sensors 21, no. 4: 1152. https://doi.org/10.3390/s21041152
APA StyleScharff Willners, J., Gonzalez-Adell, D., Hernández, J. D., Pairet, È., & Petillot, Y. (2021). Online 3-Dimensional Path Planning with Kinematic Constraints in Unknown Environments Using Hybrid A* with Tree Pruning. Sensors, 21(4), 1152. https://doi.org/10.3390/s21041152