Theoretical and Experimental Study on Nonlinear Failure of an MEMS Accelerometer under Dual Frequency Acoustic Interference


Abstract
1. Introduction
2. Acoustic Injection Experiment
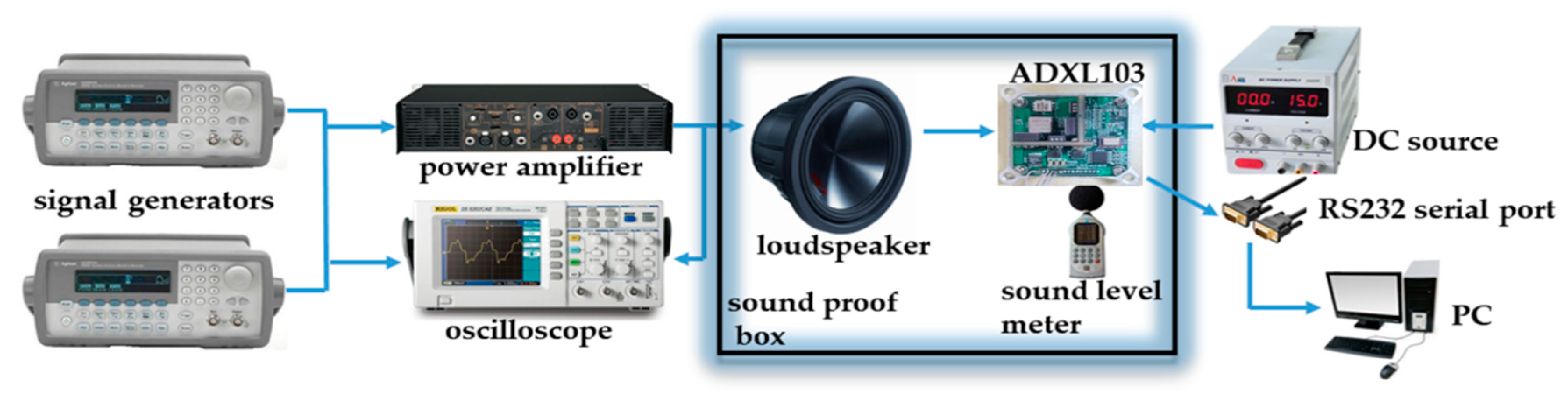
2.1. Acoustic Injection Experiment Facility
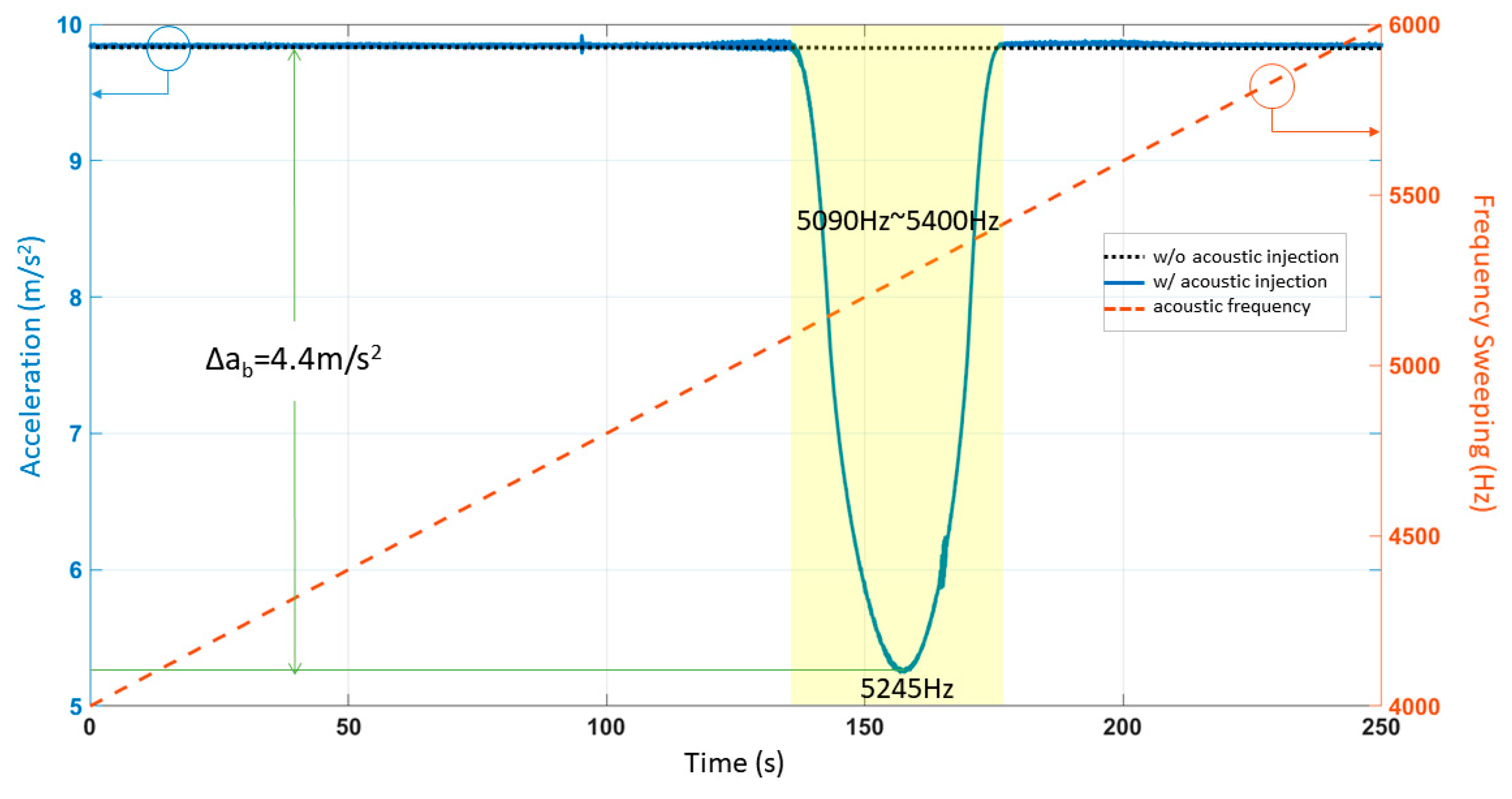
2.2. Acoustic Injection Experiment with Frequency Sweeping
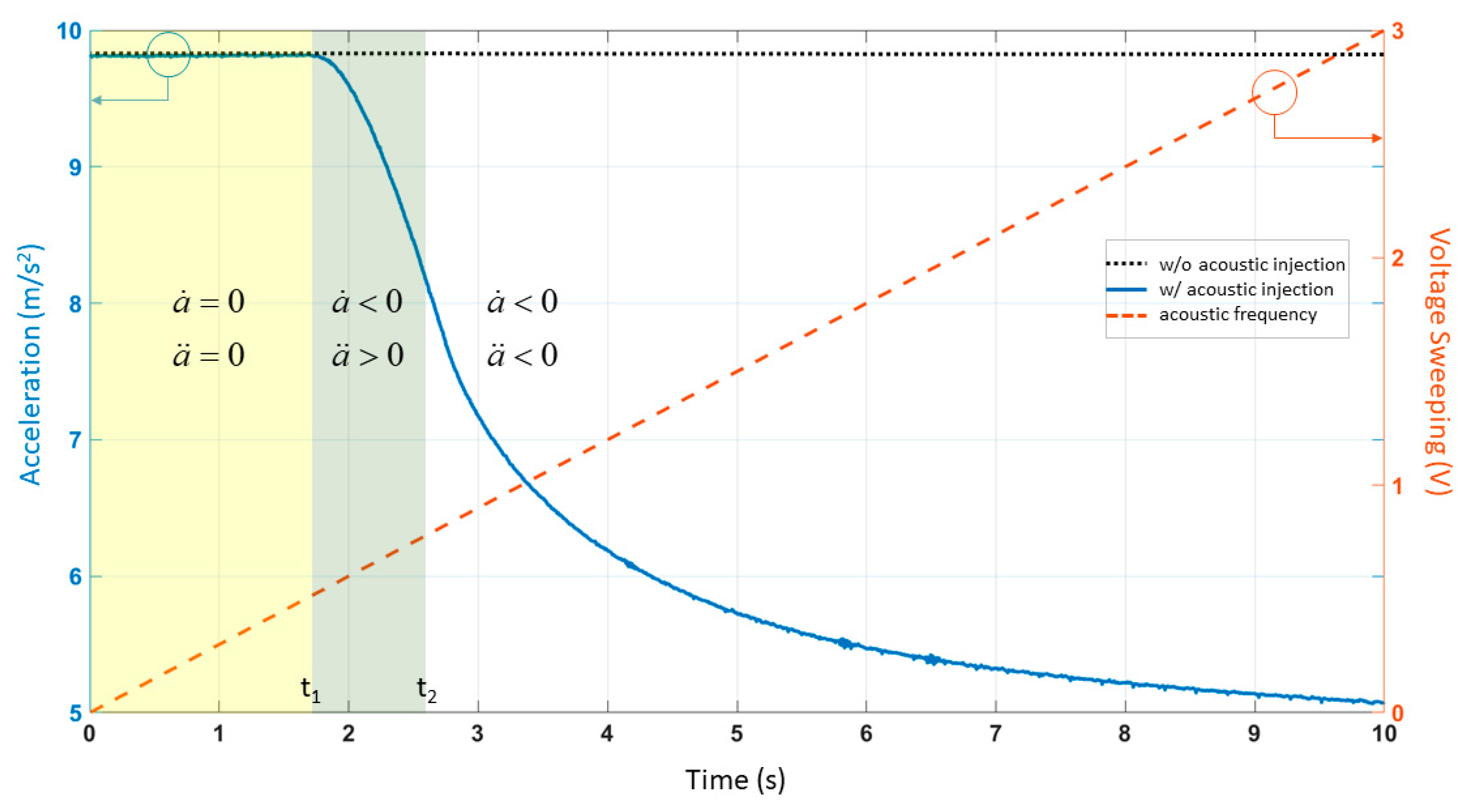
2.3. Acoustic Injection Experiment with Amplitude Sweeping
3. A Mathematical Model of the Accelerometer with Acoustic Injection Attacks
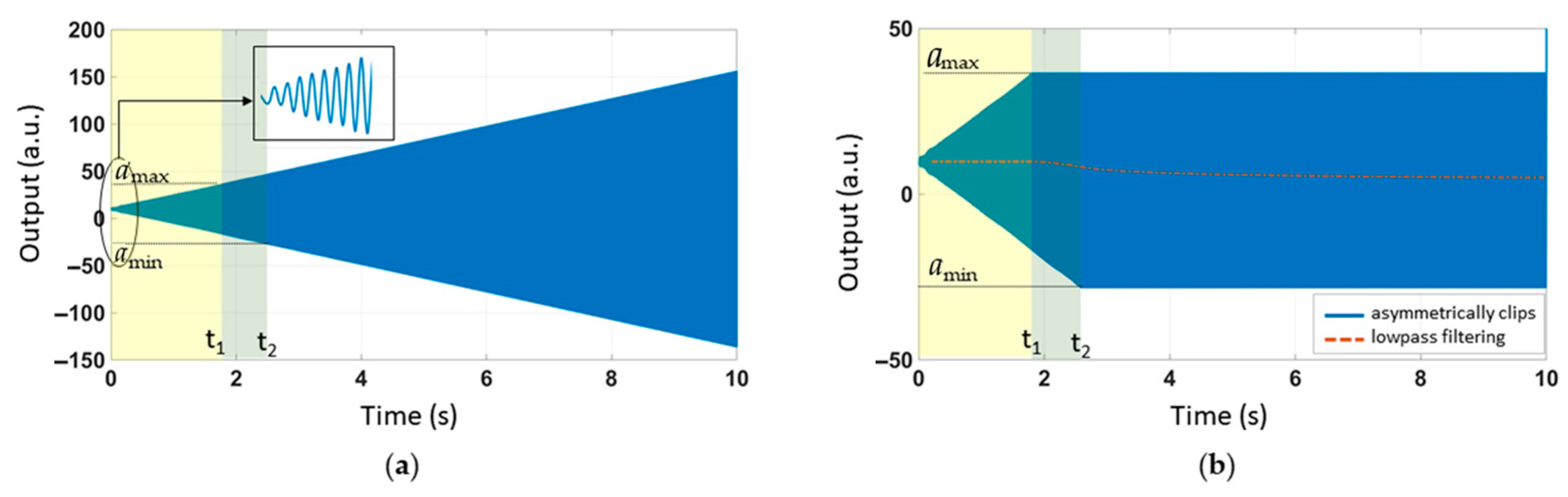
3.1. A Mathematical Model for Bilateral Asymmetric Clips
3.2. The Mathematical Model Fit with Acoustic Injection Experiment with Amplitude Sweeping
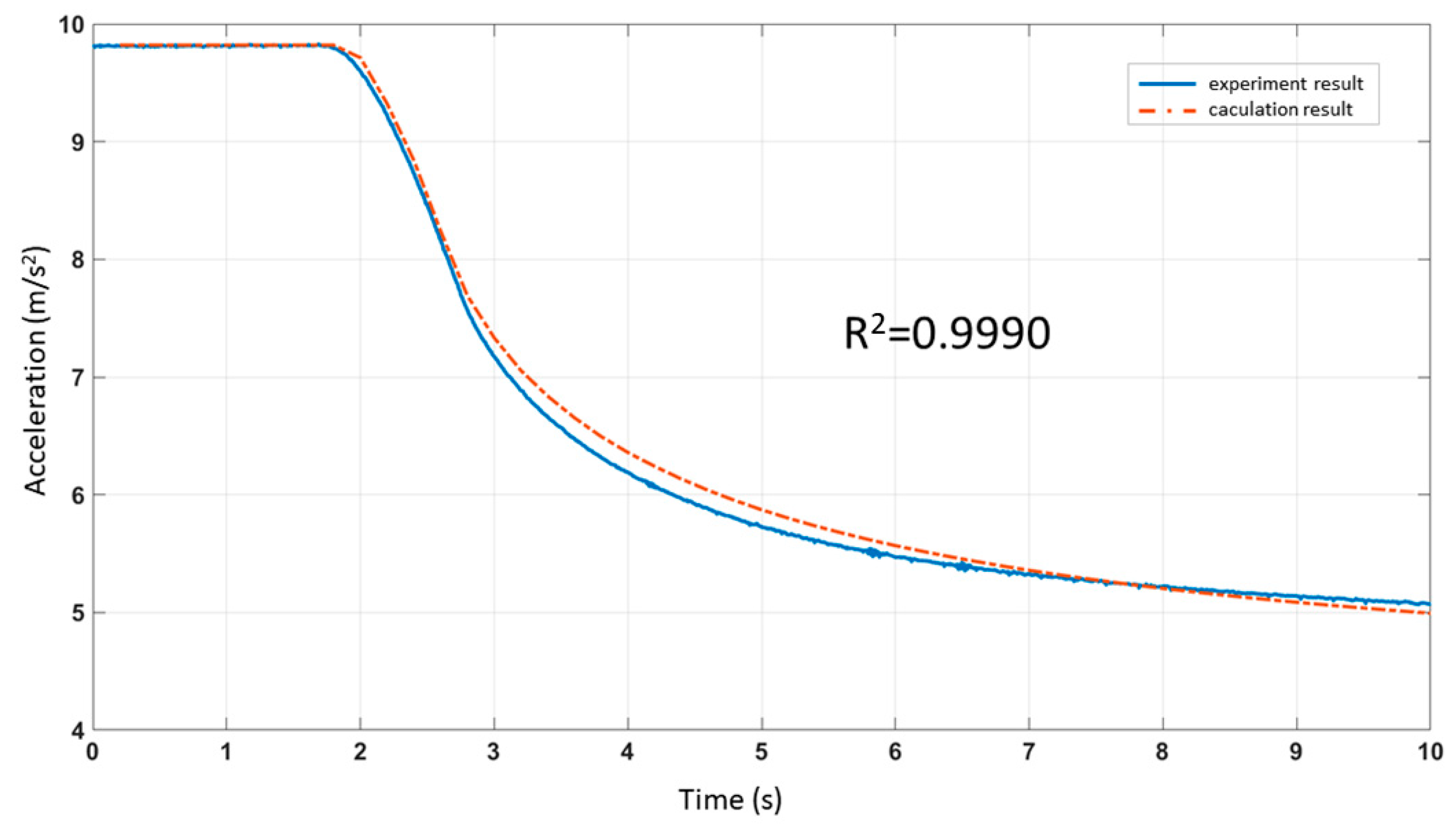
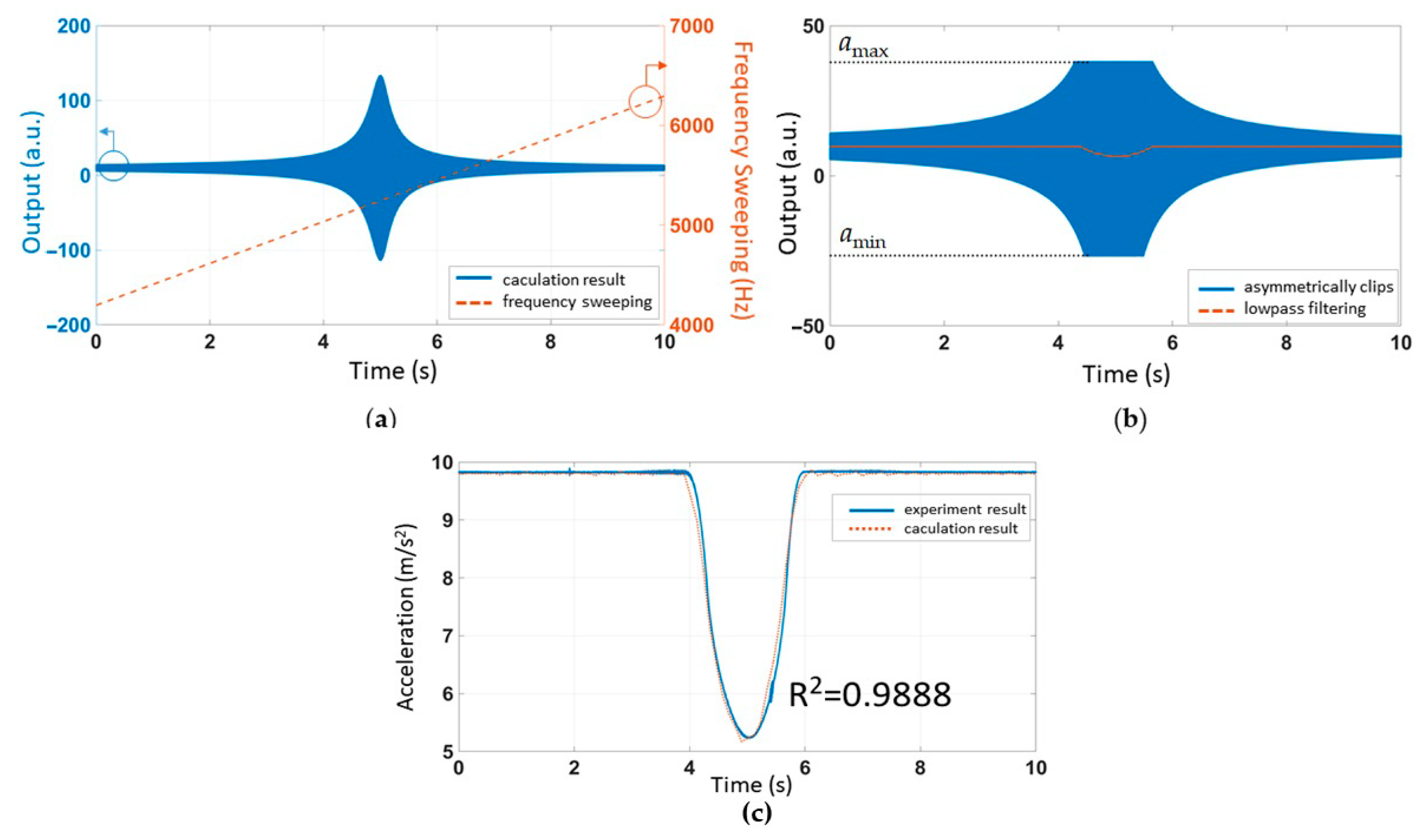
3.3. The Mathematical Model Fit with Acoustic Injection Experiment with Frequency Sweeping
4. Simulation of the Dual Frequency Acoustic Injection Attack
5. Experiment of Dual Frequency Acoustic Injection Attack
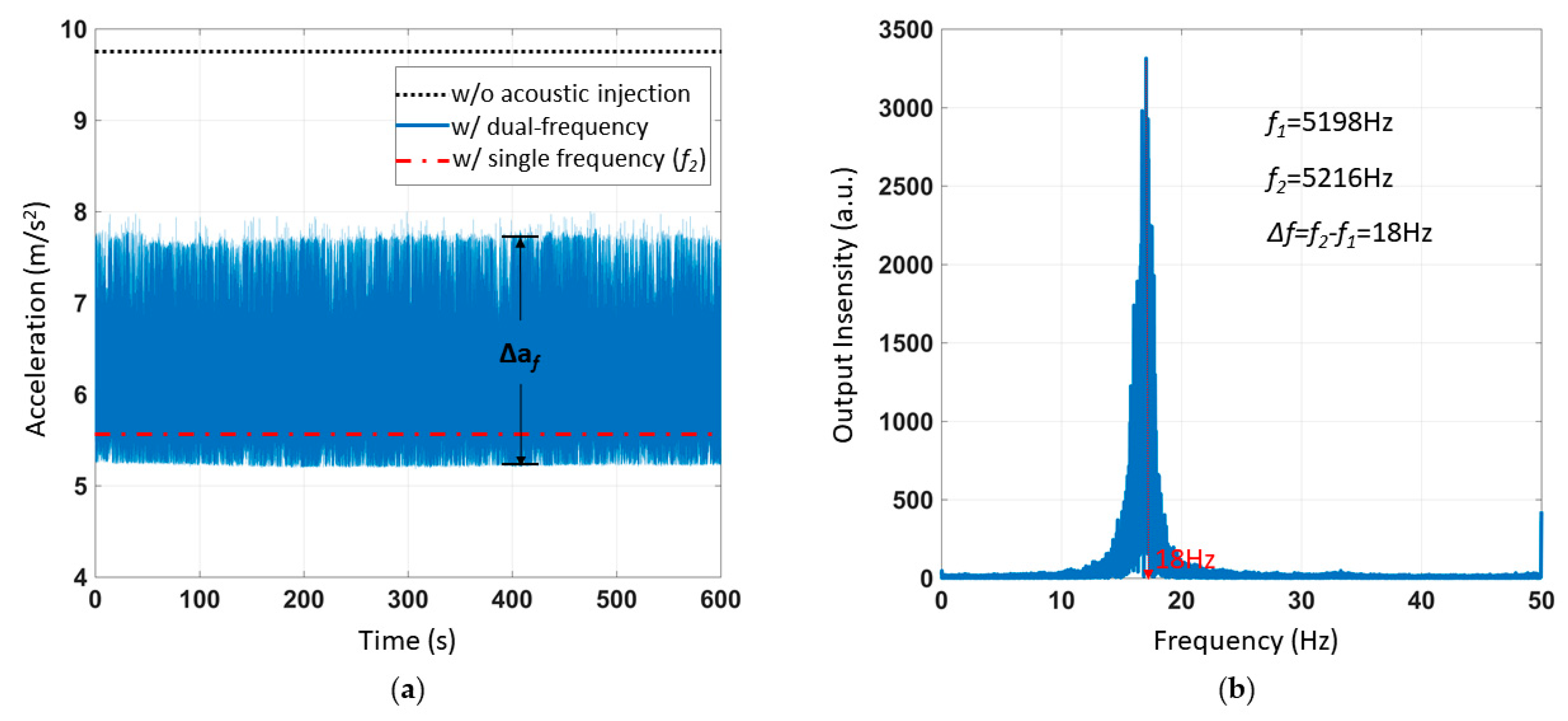
5.1. Acoustic Injection Attack Experiment with Two Superimposed Single Frequencies
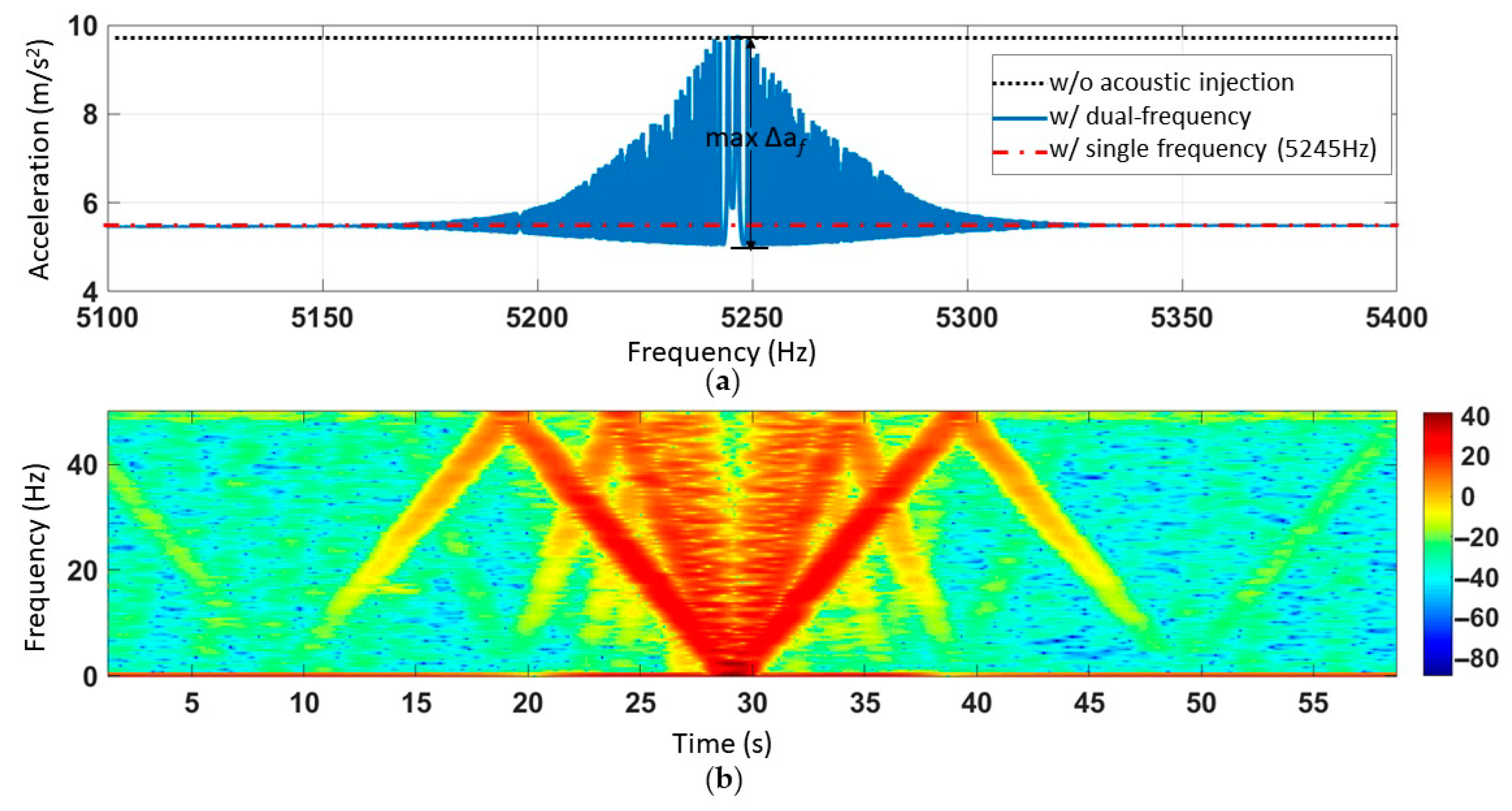
5.2. Acoustic Injection Attack Experiment of Single Frequency and Sweeping Frequency Superimposing
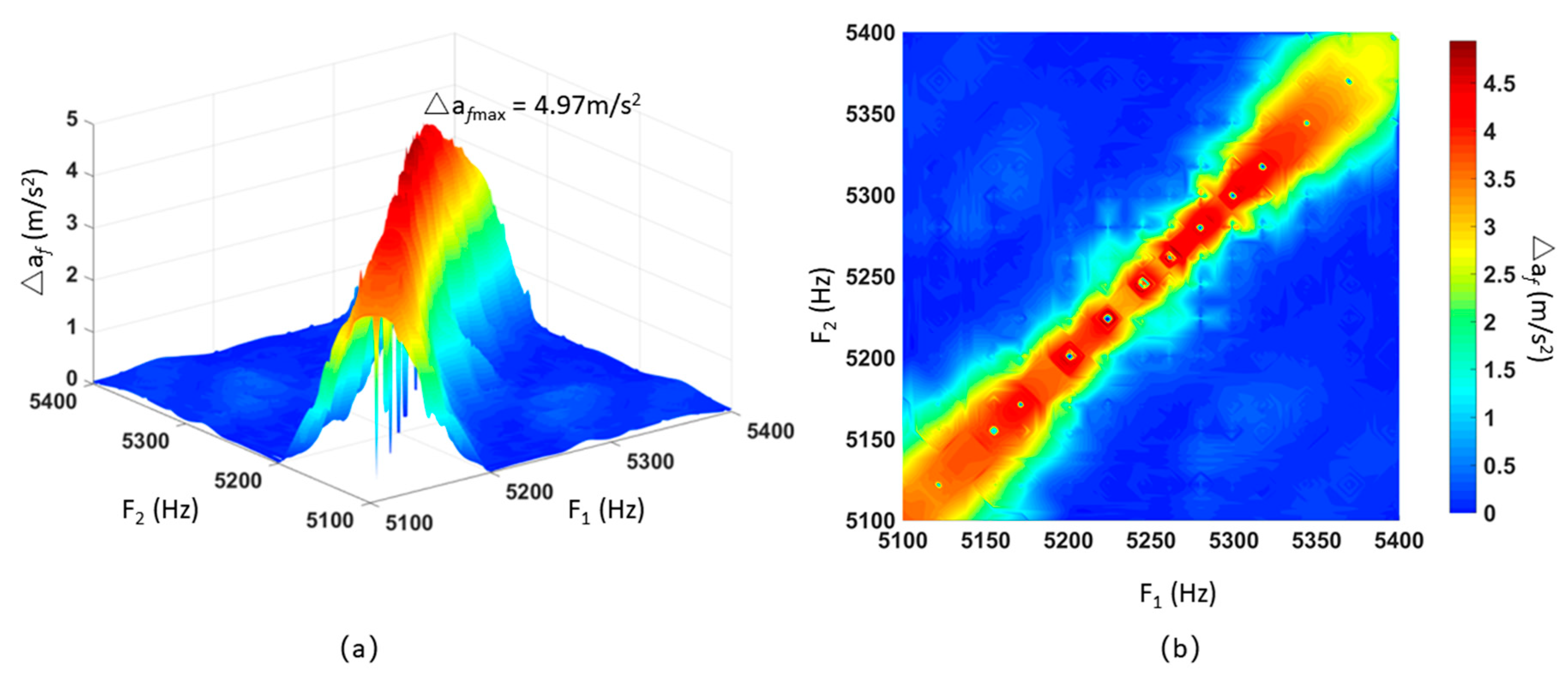
5.3. Acoustic Injection Attack Experiment of Two Sweeping-Frequency Superimposing
6. Discussion
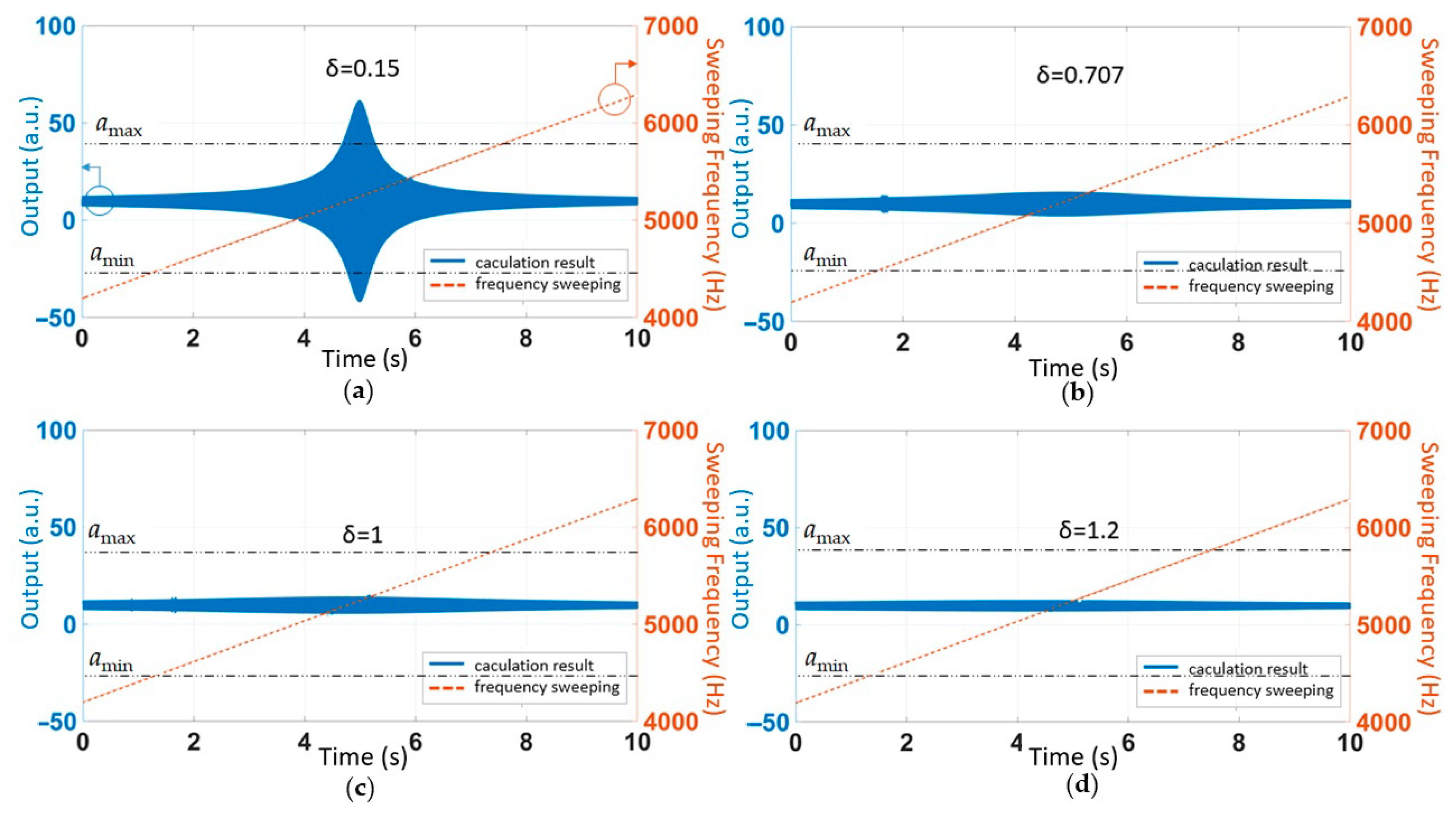
6.1. MEMS Accelerometers with Different Damping Ratios
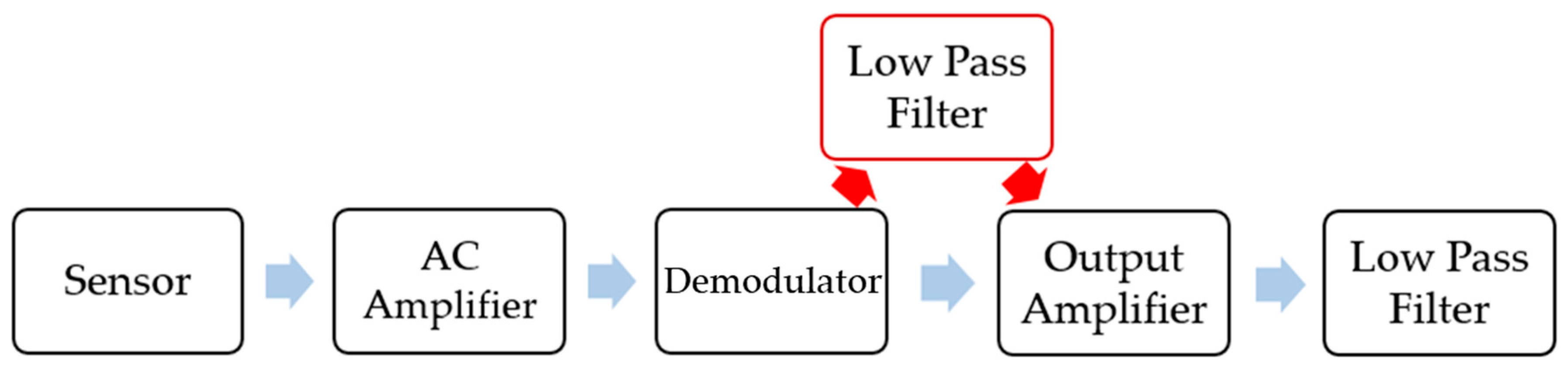
6.2. Preposition Low-Pass Filter
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, N. Full-featured pedometer design realized with 3-axis digital accelerometer. Analog Dialogue 2010, 44, 1–5. [Google Scholar]
- Kuznetsov, A.G.; Abutidze, Z.S.; Portnov, B.I. Development of MEMS sensors for aircraft control systems. Gyroscopy Navig. 2011, 2, 59–62. [Google Scholar] [CrossRef]
- Rahman, M.; Carbunar, B.; Banik, C. Fit and Vulnerable: Attacks and Defenses for a Health Monitoring Device. In Proceedings of the IEEE Symposium on Security and Privacy (IEEE S&P), San Francisco, CA, USA, 19–22 May 2013. [Google Scholar]
- Kundu, A.; Jang, J.H.; Lee, H.R. MEMS-based micro-fuel processor for application in a cell phone. J. Power Sources 2006, 162, 572–578. [Google Scholar] [CrossRef]
- Roy, S.; Mandal, S.; Hanumaiah, N. MEMS accelerometer: From engineering to medicine. IEEE Potentials 2016, 35, 30–33. [Google Scholar] [CrossRef]
- Rubia, E.D.L.; Diaz, E.A. Natural Locomotion Based on Foot-Mounted Inertial Sensors in a Wireless Virtual Reality System. Presence Teleoperators Virtual Environ. 2016, 24, 298–321. [Google Scholar] [CrossRef]
- Ciuti, G.; Ricotti, L.; Menciassi, A.; Dario, P. MEMS sensor technologies for human centred applications in healthcare, physical activities, safety and environmental sensing: A review on research activities in Italy. Sensors. 2015, 15, 6441–6468. [Google Scholar] [CrossRef] [PubMed]
- Kevin, F.; Wenyuan, X. Inside Risks of Trusting the Physics of Sensors. Commun. ACM 2018, 61, 20–23. [Google Scholar]
- Rosen, S.; Howell, P.; Bartram, J.F. Signals and Systems for Speech and Hearing. J. Acoust. Soc. Am. 2011, 29, 143–145. [Google Scholar] [CrossRef]
- Robert, N.D.; Simon, T.C.; George, T.F. A characterization of the performance of a MEMS gyroscope in acoustically harsh environments. IEEE Trans. Ind. Electron. 2011, 58, 2591–2596. [Google Scholar]
- Giechaskiel, I.; Kasper, R. Taxonomy and Challenges of Out-of-Band Signal Injection Attacks and Defenses. IEEE Commun. Surv. Tutor. 2020, 22, 645–670. [Google Scholar] [CrossRef]
- Yan, M.; Gabi, N. Gyrophone: Recognizing Speech from Gyroscope Signals. In Usenix Conference on Security Symposium; USENIX Association: Berkeley, CA, USA, 2014; pp. 1053–1067. [Google Scholar]
- Yunmok, S.; Hocheol, S.; Dongkwan, K.; Youngseok, P.; Juhwan, N.; Kibum, C.; Jungwoo, C.; Yongdae, K. Rocking Drones With Intentional Sound Noise on Gyroscopic Sensors. In Proceedings of the 24th USENIX Security Symposium, Washington, DC, USA, 12–14 August 2015. [Google Scholar]
- Trippel, T.; Weisse, O.; Xu, W. Walnut: Waging Doubt on the Integrity of MEMS Accelerometers with Acoustic Injection Attacks. In Proceedings of the IEEE European Symposium on Security and Privacy (EuroS&P), Paris, France, 26–28 April 2017; pp. 3–18. [Google Scholar]
- Wang, Z.; Wang, K.; Yang, B. Sonic gun to smart devices: Your devices lose control under ultrasound/sound. In Proceedings of the BlackHat USA, Las Vegas, NV, USA, 26–27 July 2017. [Google Scholar]
- Khazaaleh, S.; Korres, G.; Eid, M.; Rasras, M.; Daqaq, M.F. Vulnerability of MEMS Gyroscopes to Targeted Acoustic Attacks. IEEE Access. 2019, 7, 89534–89543. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, H.; Shen, S. Investigation of Acoustic Injection on the MPU6050 Accelerometer. Sensors 2019, 19, 3083. [Google Scholar] [CrossRef] [PubMed]
- Sun, Y.; Guo, P.; Feng, L. A filtering algorithm of MEMS gyroscope to resist acoustic interference. Sensors 2020, 20, 7352. [Google Scholar] [CrossRef] [PubMed]
- Chaouki, K.; Jose, L.E. IEMI threats for information security: Remote command injection on modern smartphones. IEEE Trans. Electromagn. Compat. 2015, 57, 1752–1755. [Google Scholar]
- Diao, W.; Liu, H.; Zhou, Z.; Zhang, K. Your voice assistant is mine: How to abuse speakers to steal information and control your phone. In Proceedings of the ACM Workshop on Security and Privacy in Smartphones & Mobile Devices, Denver, CO, USA, 12–16 October 2015; pp. 63–74. [Google Scholar]
- Analog Devices. Available online: https://www.analog.com/cn/products/adxl103.html (accessed on 14 February 2020).
- Georg, J.; Sebastian, Z.; Casimiro, A. Generic sensor failure modeling for cooperative systems. Sensors 2018, 18, 925. [Google Scholar]
- Lu, C.Y.; Guo, P.; Feng, L.H.; Yang, A.Y.; Wang, J.Y.; Xing, C.Y. An intentional acoustic interference approach to control output signals of MEMS gyroscope based on short-time Fourier analysis. In Proceedings of the 20th International Conference on Electronic Packaging Technology, Hong Kong, China, 12–15 August 2019. [Google Scholar]
- Beliveau, A.; Spencer, G.T.; Thomas, K.A. Evaluation of MEMS capacitive accelerometers. IEEE Des. Test Comput. 1999, 16, 48–56. [Google Scholar] [CrossRef]
- TDK InvenSense. Available online: www.invensense.com/products/motion-tracking/6-axis/mpu6050 (accessed on 29 February 2020).
- Lucibello, A.; Capoccia, G.; Proietti, E.; Marcelli, R.; Margesin, B.; Mulloni, V.; Giacomozzi, F.; Vitulli, F.; Scipioni, M.; Bartolucci, G. Reliable response of RF MEMS LTCC packaged switches after mechanical andthermal stress. Microsyst. Technol. 2016, 22, 495–501. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name (unit) | Symbol | Parameter Value |
|---|---|---|
| Damping ratio | δ | 0.07 |
| Natural frequency (rad/s) | ω0 | 33037.9 |
| Maximum value that can be output (a.u.) | amax | 38.26 |
| Minimum value that can be output (a.u.) | amin | −26.72 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, P.; Zhang, J.; Feng, L.; Cui, J.; Xing, C. Theoretical and Experimental Study on Nonlinear Failure of an MEMS Accelerometer under Dual Frequency Acoustic Interference. Sensors 2021, 21, 945. https://doi.org/10.3390/s21030945
Guo P, Zhang J, Feng L, Cui J, Xing C. Theoretical and Experimental Study on Nonlinear Failure of an MEMS Accelerometer under Dual Frequency Acoustic Interference. Sensors. 2021; 21(3):945. https://doi.org/10.3390/s21030945
Chicago/Turabian StyleGuo, Peng, Jiayu Zhang, Lihui Feng, Jianmin Cui, and Chaoyang Xing. 2021. "Theoretical and Experimental Study on Nonlinear Failure of an MEMS Accelerometer under Dual Frequency Acoustic Interference" Sensors 21, no. 3: 945. https://doi.org/10.3390/s21030945
APA StyleGuo, P., Zhang, J., Feng, L., Cui, J., & Xing, C. (2021). Theoretical and Experimental Study on Nonlinear Failure of an MEMS Accelerometer under Dual Frequency Acoustic Interference. Sensors, 21(3), 945. https://doi.org/10.3390/s21030945