
Dense Deployment of LoRa Networks: Expectations and Limits of Channel Activity Detection and Capture Effect for Radio Channel Access



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
1.1. Related Works
1.2. Contributions and Outline
2. Testing LoRa Channel Activity Detection
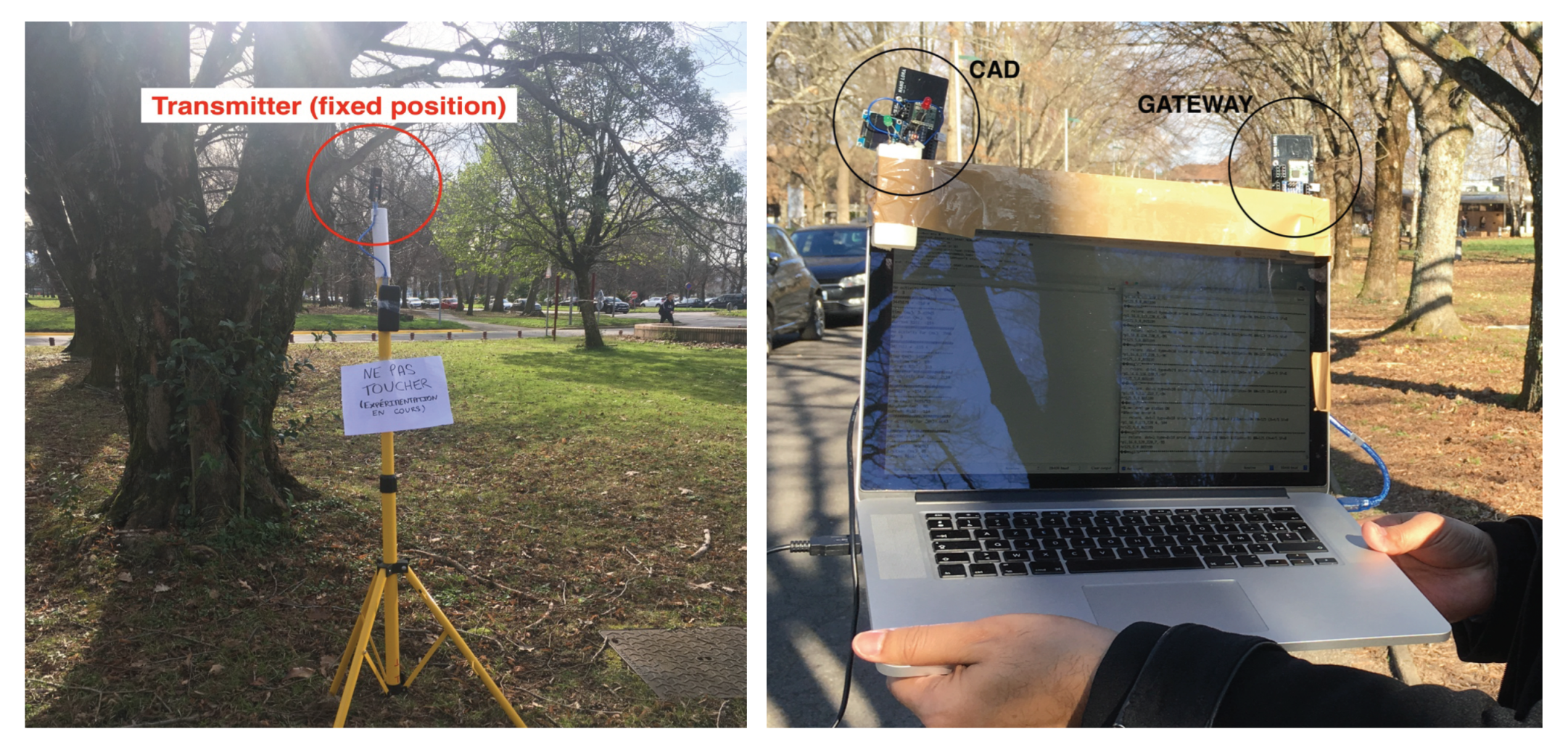
2.1. CAD Test Environment
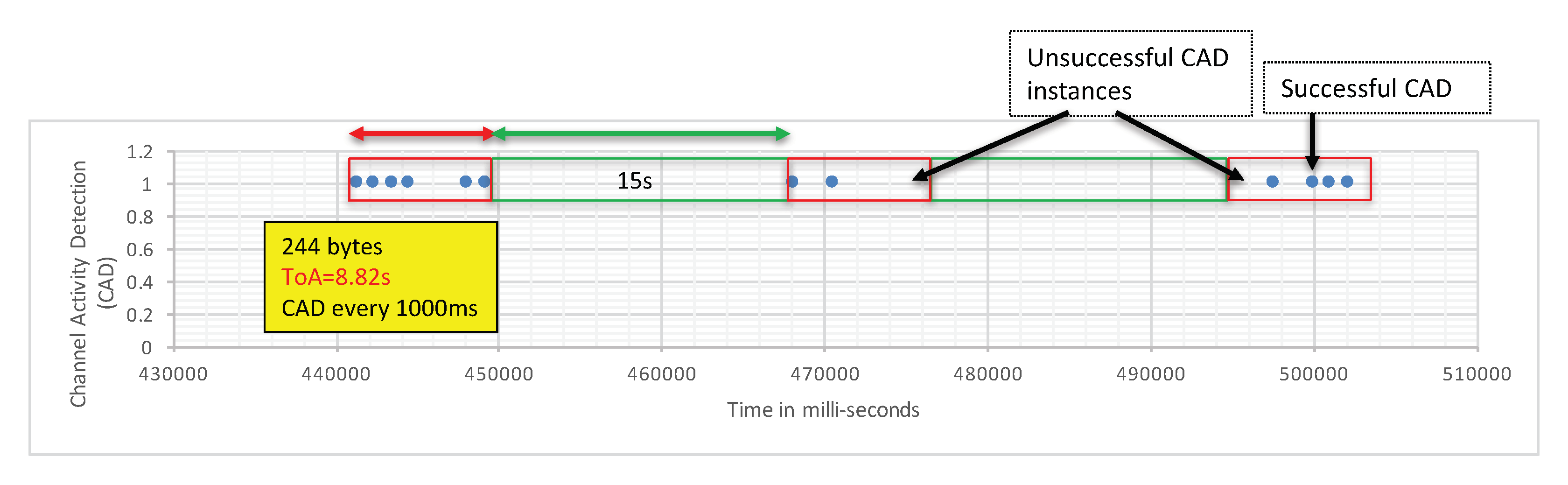
2.2. CAD Experiment 1 Results
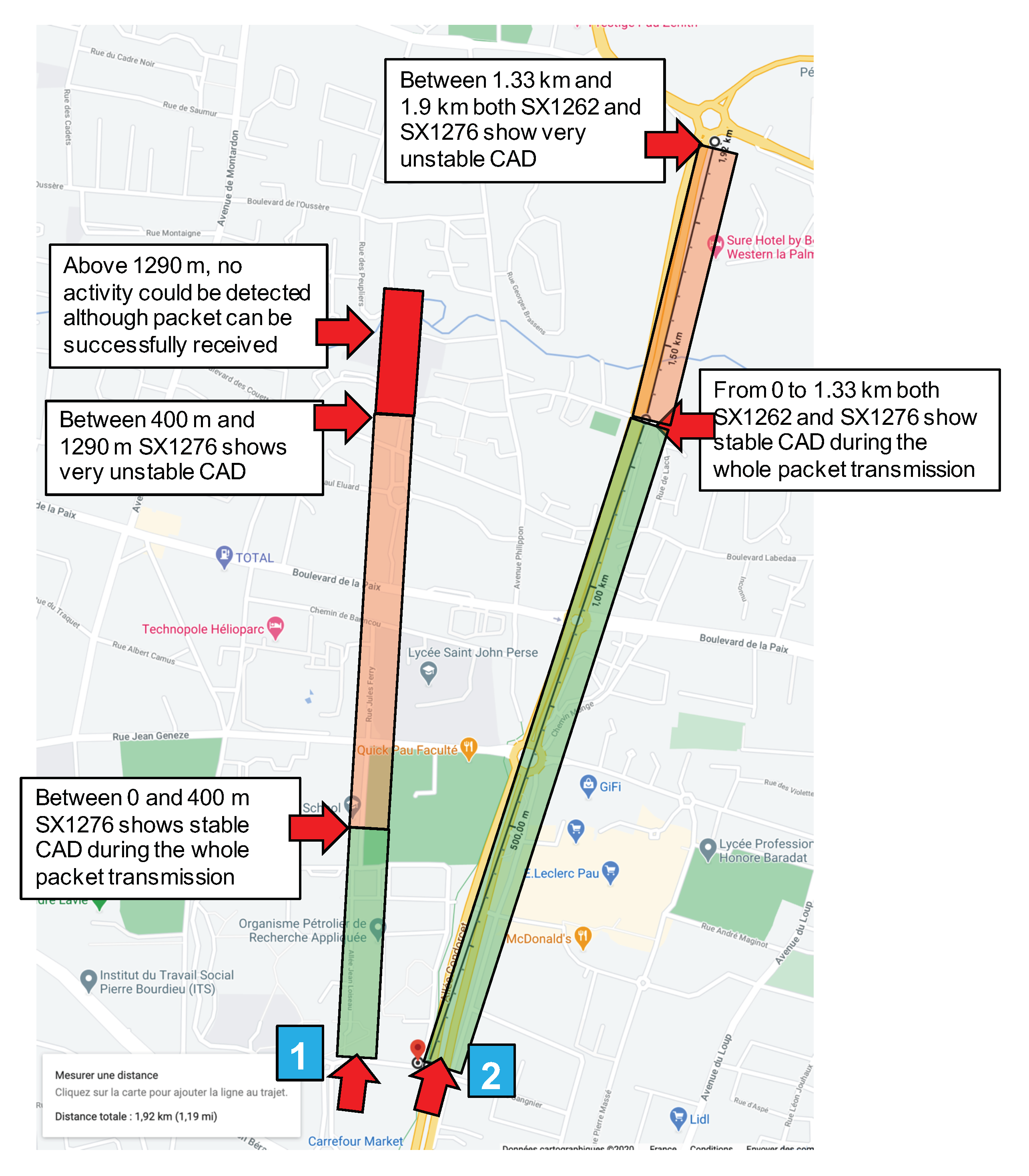
2.3. CAD Experiment 2 Description and Results
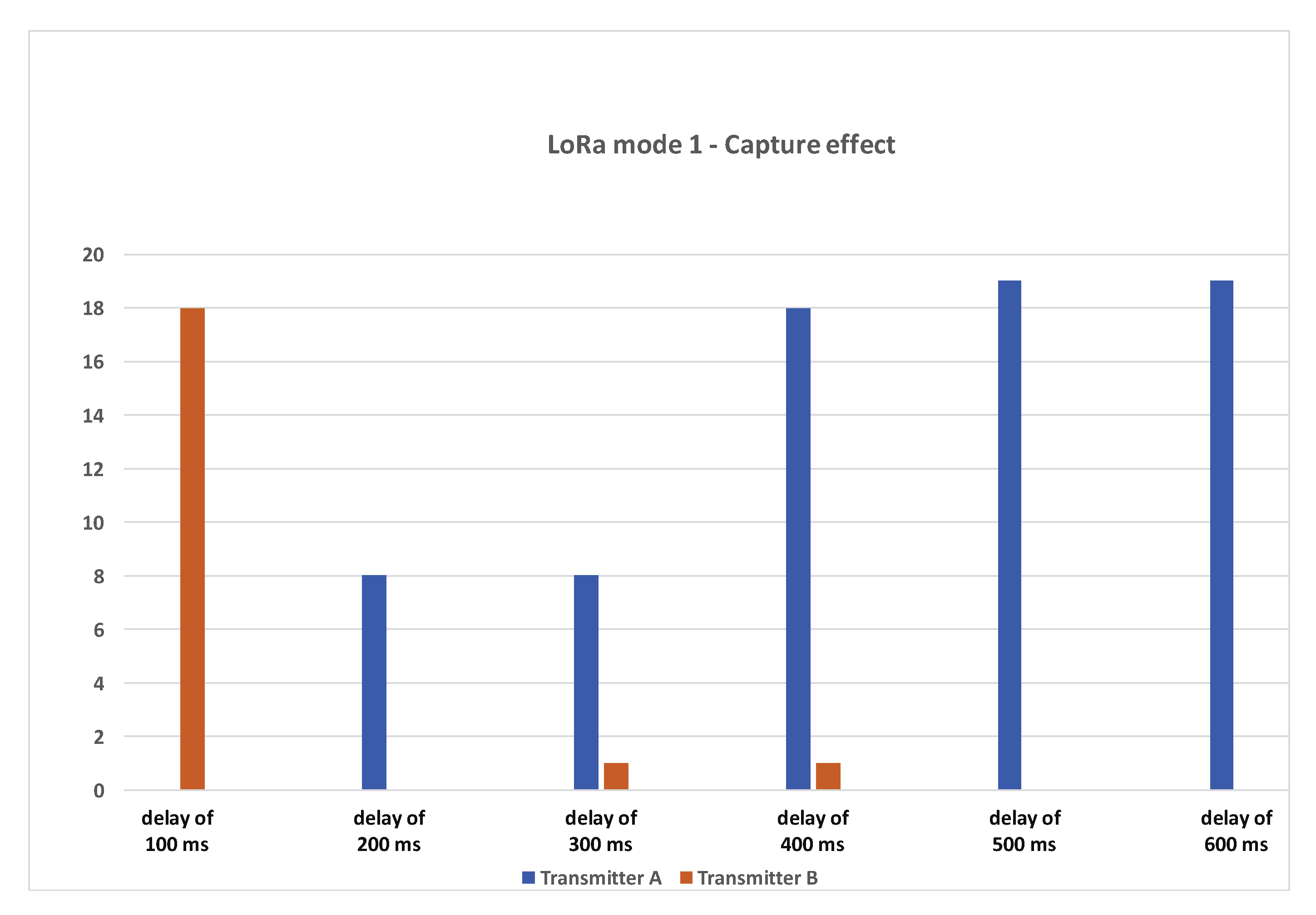
3. Capture Effect in LoRa
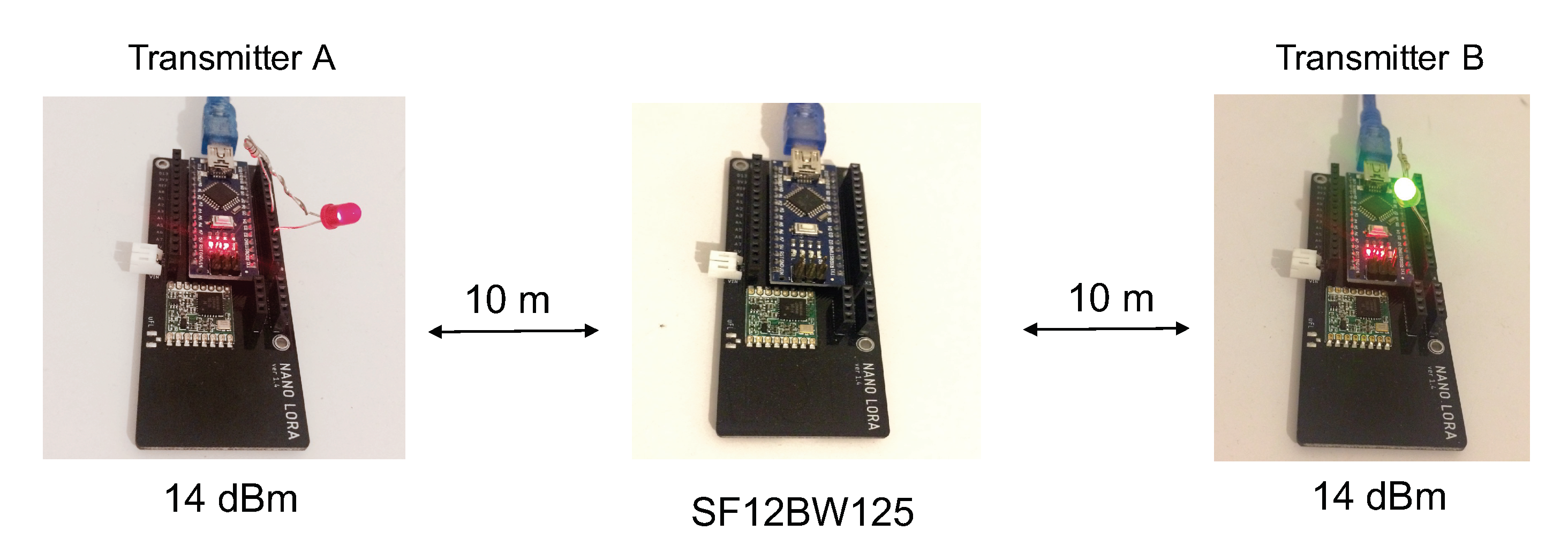
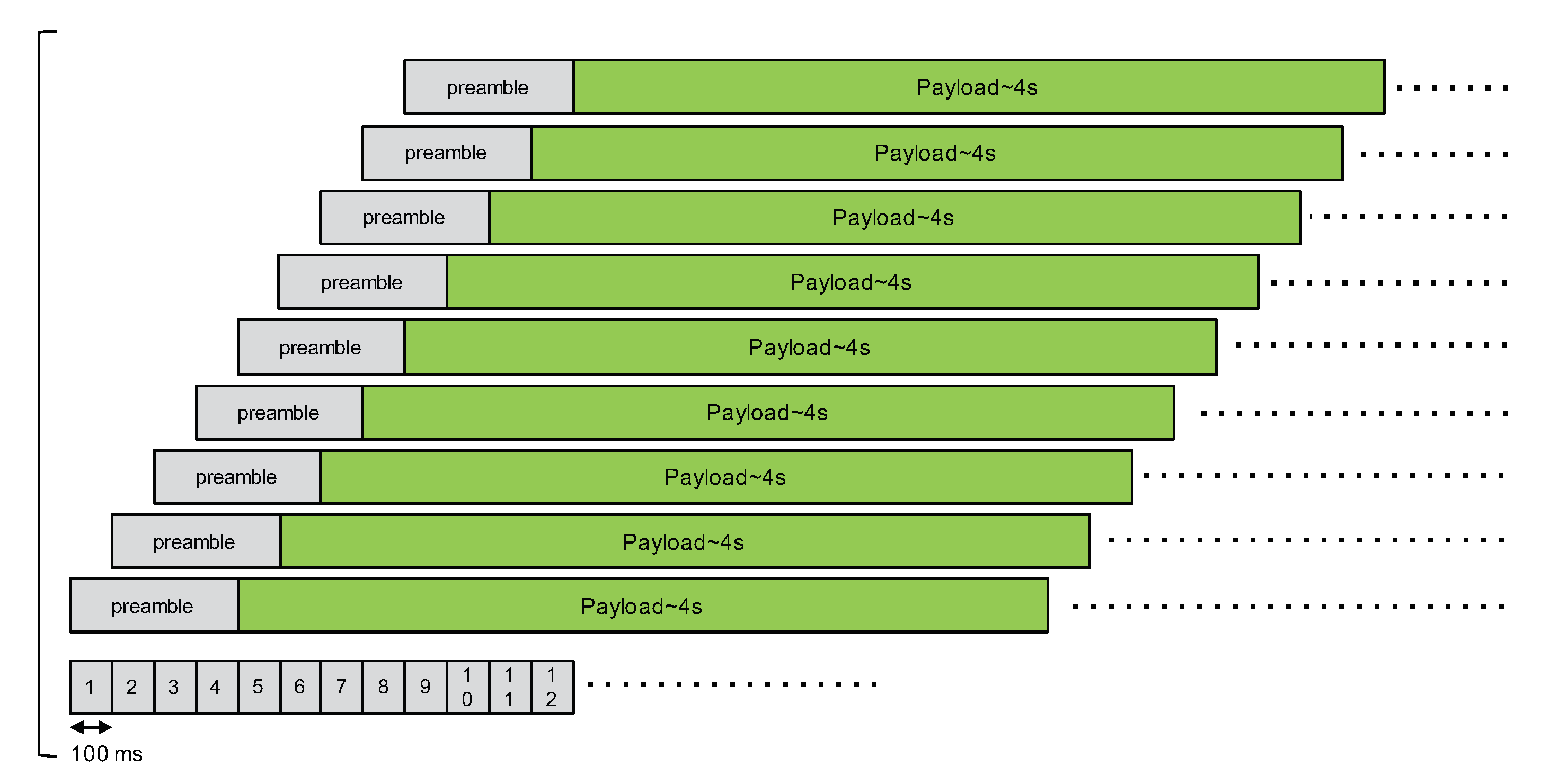
3.1. First Capture Effect Experimentation Settings
3.1.1. Results
3.1.2. Summary
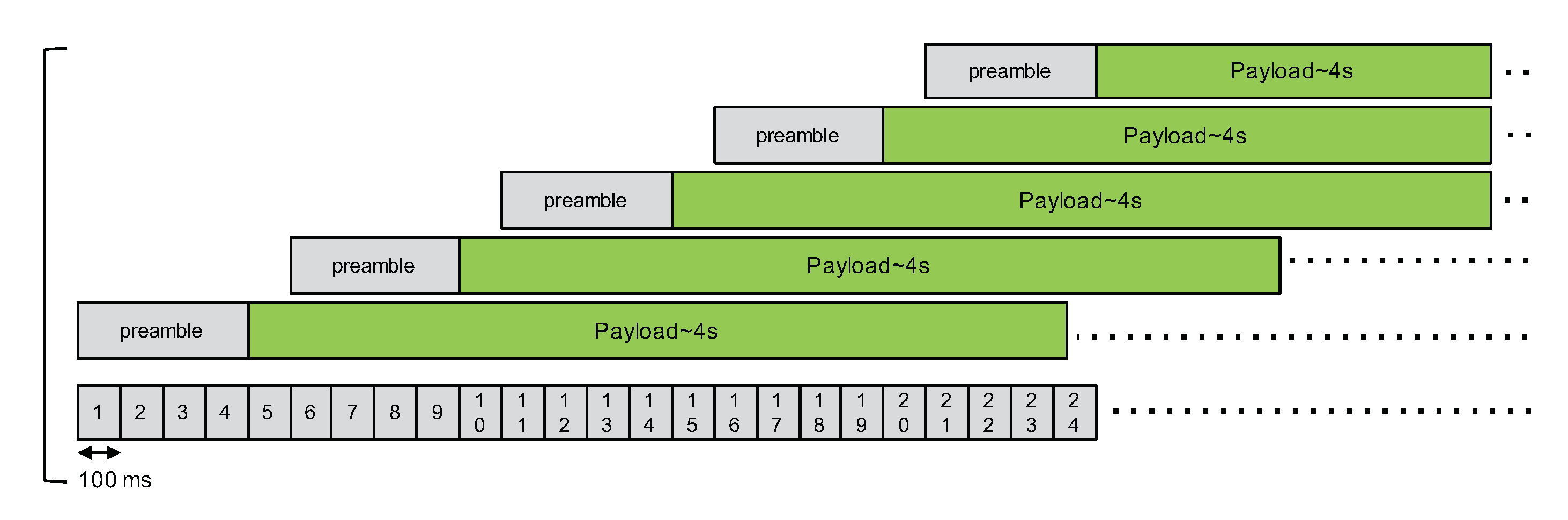
3.2. Second Capture Effect Experimentation Settings
3.2.1. Results
3.2.2. Summary
4. What Channel Access for LoRa?
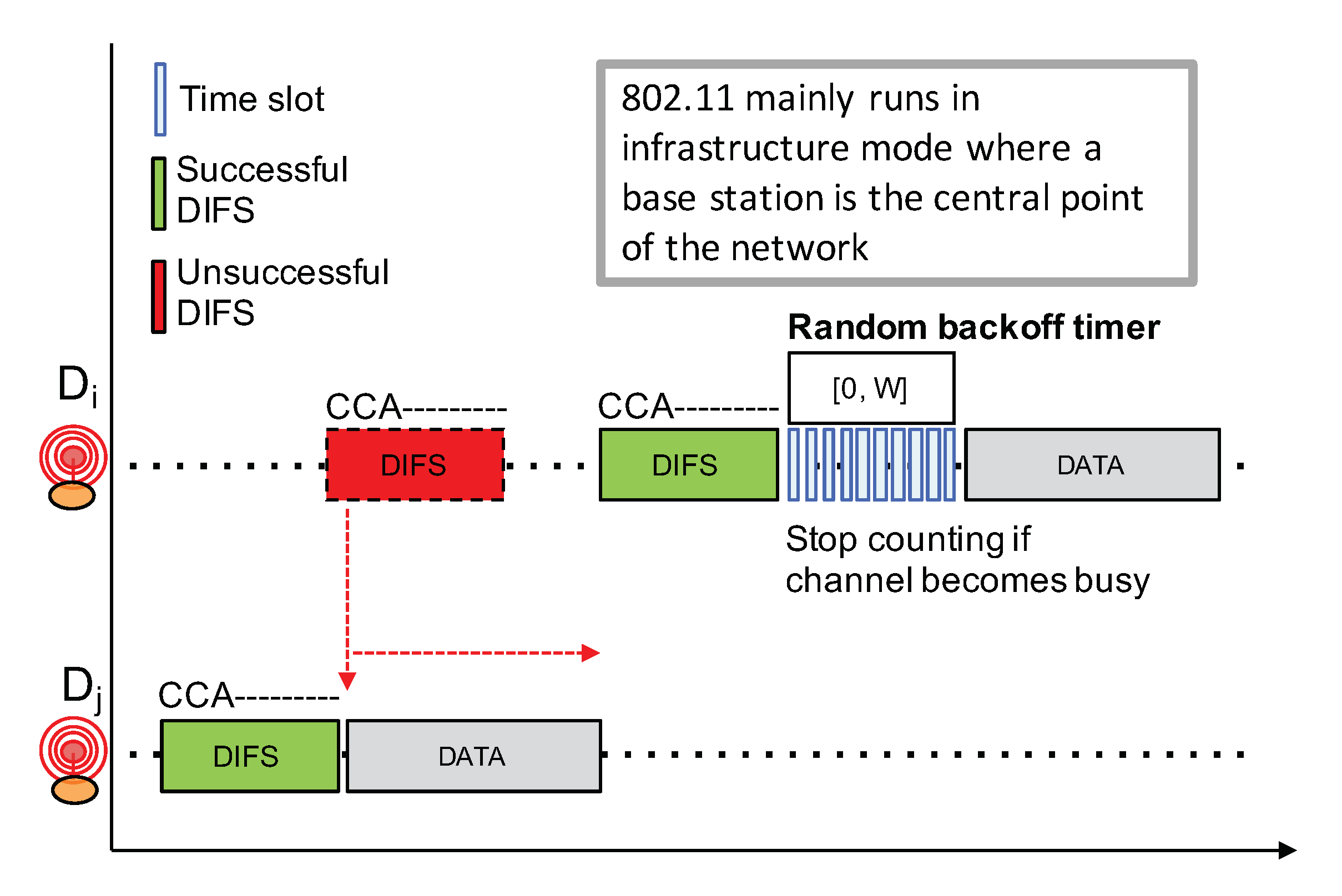
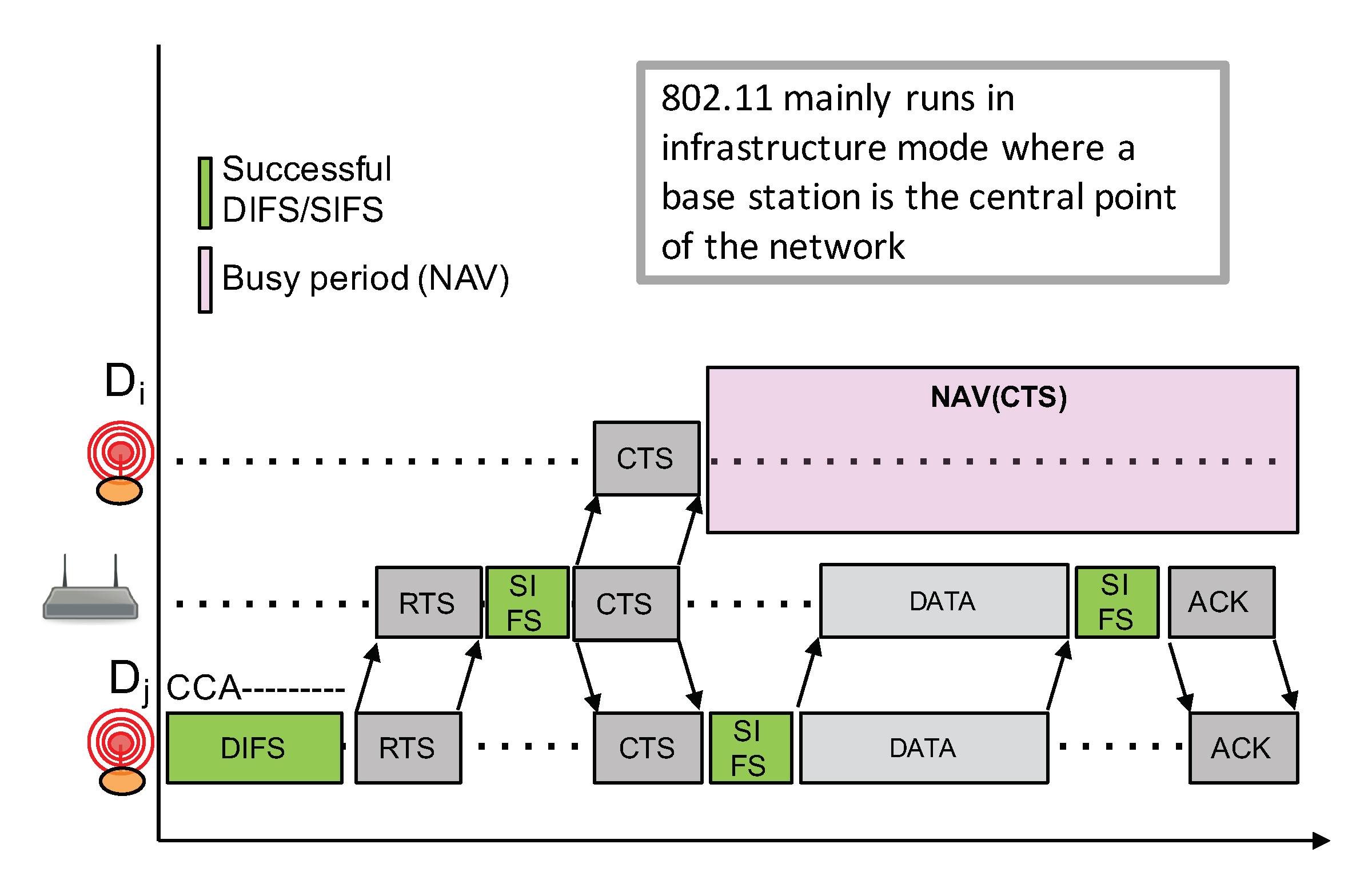
4.1. Review of Channel Access Principles
- Before initiating a transmission, a node first senses the channel in an attempt to detect an ongoing transmission from other nodes;
- If radio activity has not been detected during a DCF inter-frame space (), the node can proceed with the transmission. This is illustrated by a green );
- If there are some radio activities meaning that the channel is busy, which is illustrated by a red , then the node will continuously sense the channel to detect for the end of the transmission.
- Once the channel becomes free, the node needs to observe a free channel for an additional duration. If this is the case, then the node will initiate a random backoff counter expressed in number of slot times in the range ;
- This random backoff counter will be decreased as long as the channel is free. When a transmission is detected (a competing node started a transmission earlier), then this counter will be frozen. The node will then wait for the channel to become free again for at least a duration before resuming to decrease the backoff counter;
- When the random backoff counter reaches 0, the node can start its packet transmission;
- W is initially set to 1. W will be doubled for each retry (this is the exponential backoff) until it reaches a maximum value,
- Applying a random backoff counter when the channel becomes free is necessary because several nodes may be competing and are all waiting for the channel to be free.
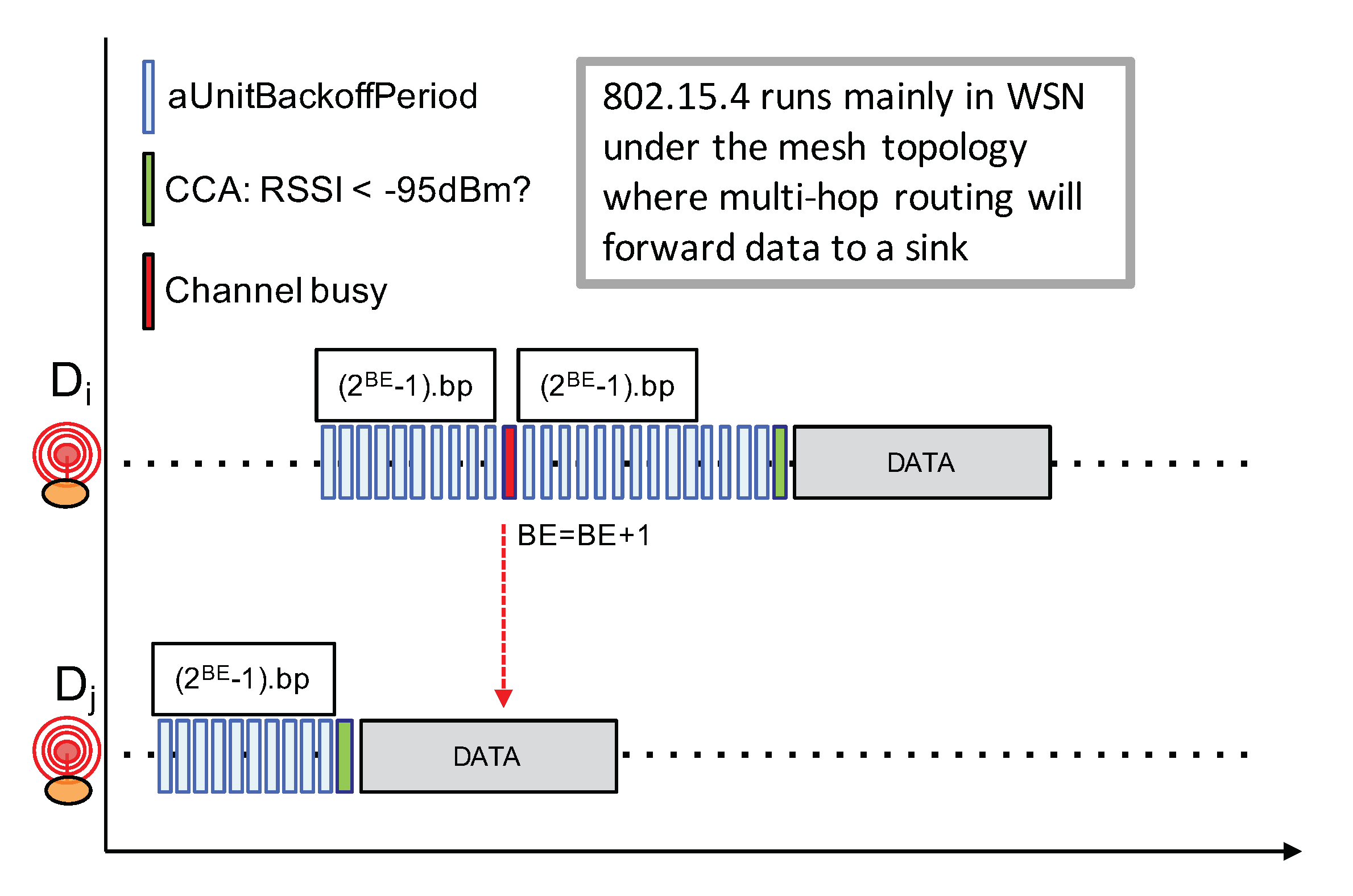
- Prior to any packet transmission attempt, a node first has to wait for a random number of backoff periods in the range ], where BE is initially set to 3;
- At the end of the backoff timer, if the channel is free, then the node can immediately start its packet transmission;
- If the channel is sensed busy, BE is increased and the node waits for an additional ] backoff periods. BE can be increased until it reaches a maximum value;
4.2. Design Guidelines for LoRa
- As CAD is not reliable enough to detect all ongoing transmission, the proposed approach can not entirely rely on CCA but should also have a collision avoidance mechanism similar to IEEE 802.11 RTS/CTS;
- For the same reason, it is not necessary—nor desirable because of energy consumption considerations—to continuously detect for the end of a transmission;
- Because of (1) and (2), a complex backoff timer management procedure with a freeze & resume mechanism as in IEEE 802.11 CSMA is not really tractable;
- However, as node density can be high, an initial backoff procedure prior to packet transmission similar to IEEE 802.15.4 CSMA/CA can still help in improving the temporal distribution of competing transmitter nodes;
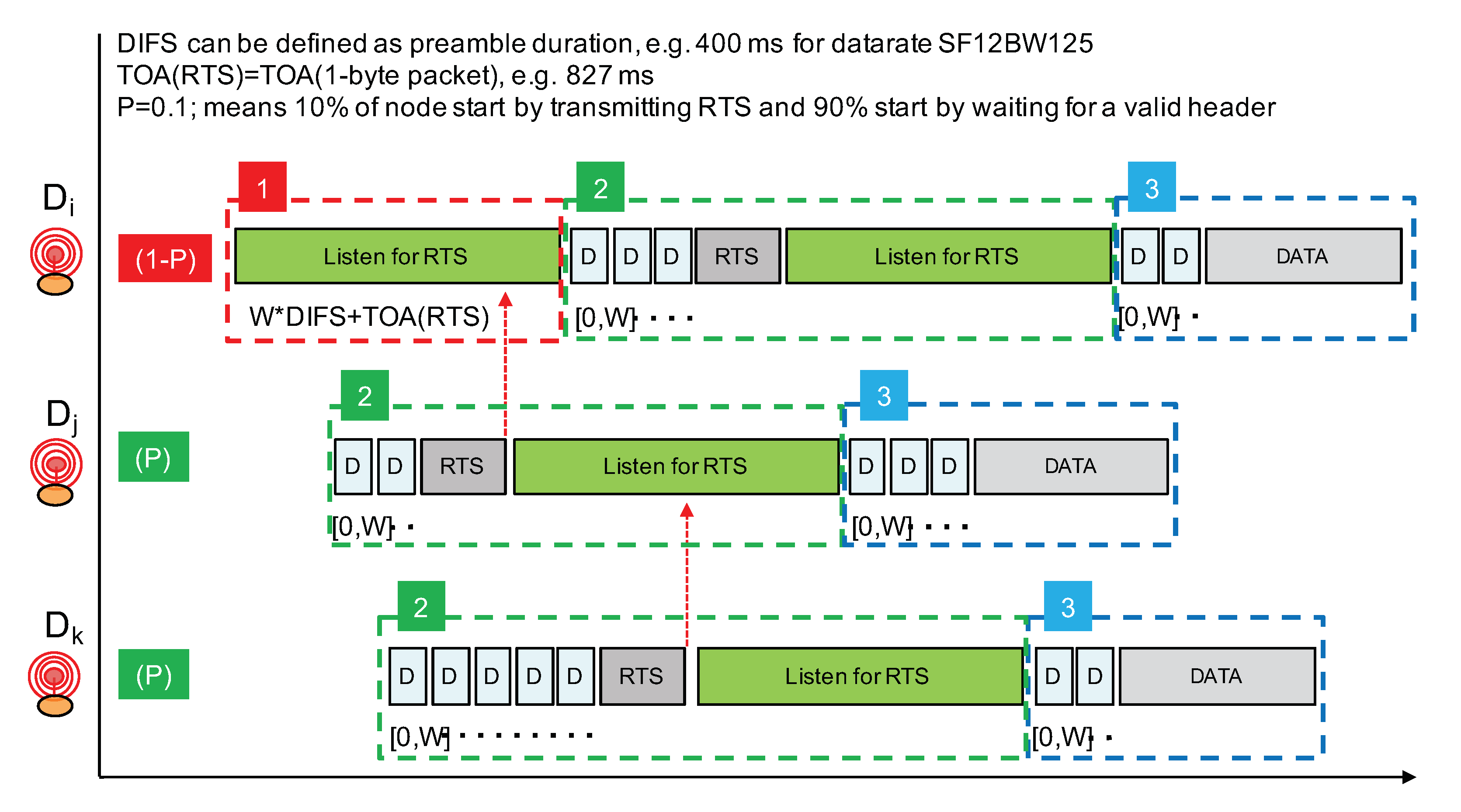
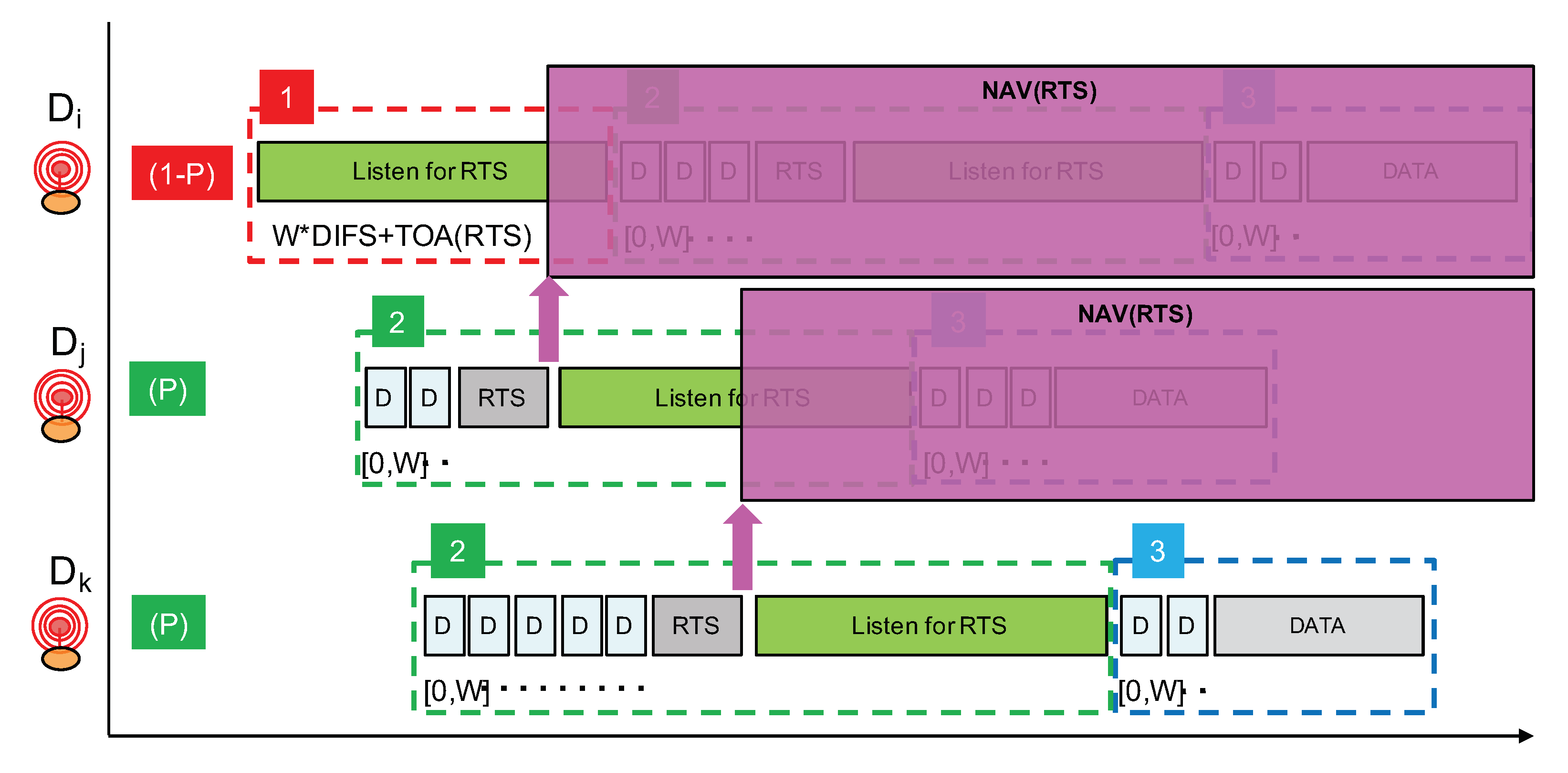
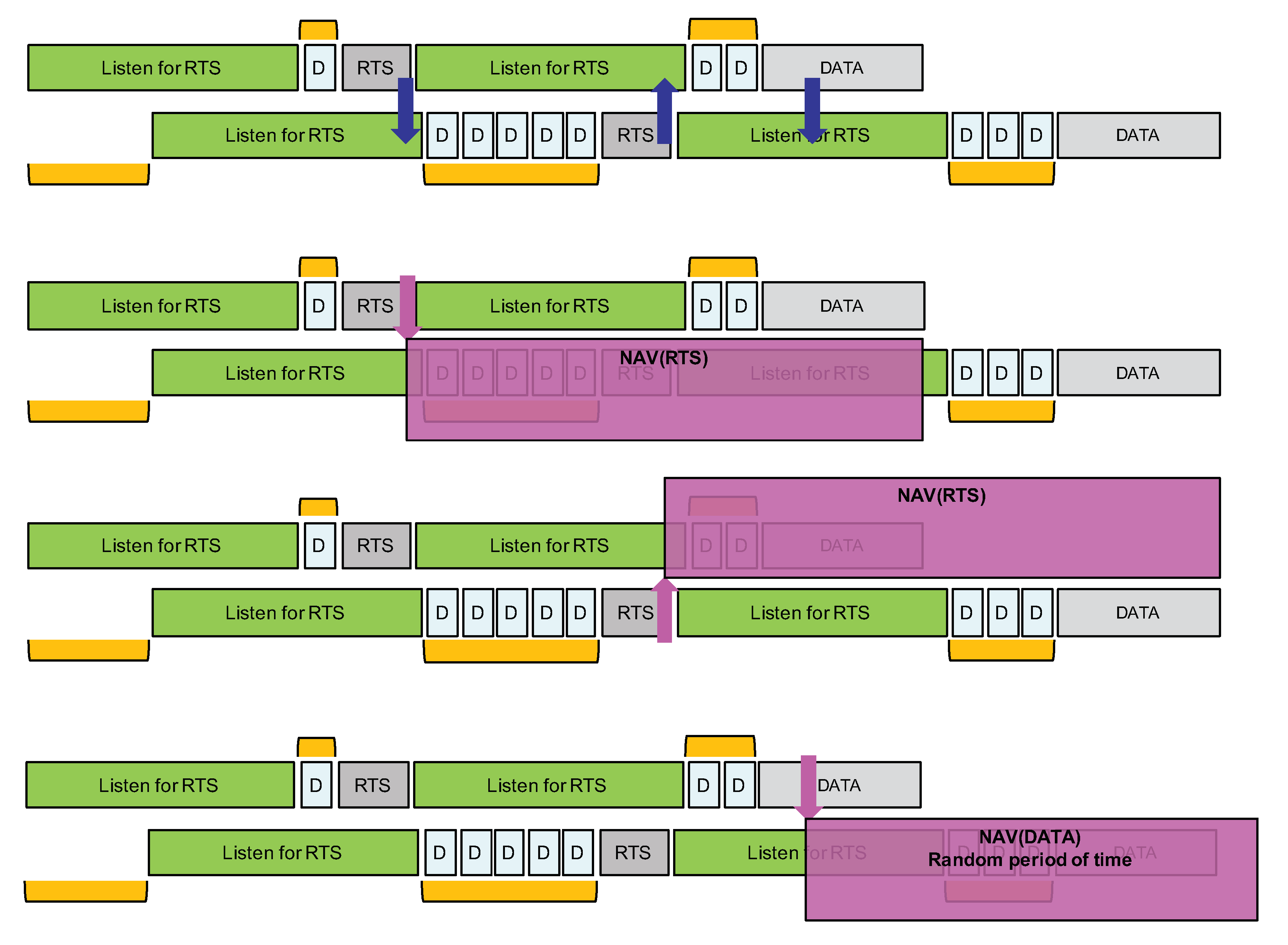
- Since nodes are not continuously in receive mode, and also because of duty-cycle limitations, a congestion avoidance mechanism as stated in (1) can not implement the full RTS/CTS exchange mechanism. As CTS depends on the correct reception of an RTS, the only control packet that is really needed is the RTS;
- In order to receive the RTS indicating a future data transmission, a node willing to transmit needs first to listen for a sufficiently long period for an RTS;
- With an RTS packet carrying only the expected size of future data packet, the correct reception of an RTS can enable a NAV mechanism similar to the one of IEEE 802.11 RTS/CTS;
- While the majority of transmitter nodes should start by listening for an RTS, a minority proportion of transmitter nodes should start by sending the RTS. Therefore, a node willing to transmit will first determine whether it will start listening for RTS or start sending the RTS;
4.3. Proposed Channel Access Mechanism for LoRa
5. Implementation and Preliminary Results
5.1. Implementation
5.2. Preliminary Tests and Results
6. Discussion
6.1. Channel Access and Similarity with Neighbor Discovery Protocols
6.2. Reliability and Efficiency
6.3. Energy Considerations
7. Conclusions and Future Works
Author Contributions
Funding
Conflicts of Interest
References
- Mekki, K.; Bajic, E.; Chaxel, F.; Meyer, F. A comparative study of LPWAN technologies for large-scale IoT deployment. ICT Express 2019, 5, 1–7. [Google Scholar] [CrossRef]
- Yousuf, A.M.; Rochester, E.M.; Ousat, B.; Ghaderi, M. Throughput, Coverage and Scalability of LoRa LPWAN for Internet of Things. In Proceedings of the IEEE/ACM 26th International Symposium on Quality of Service (IWQoS), Banff, AB, Canada, 4–6 June 2018; pp. 1–10. [Google Scholar] [CrossRef]
- Adelantado, F.; Vilajosana, X.; Tuset-Peiró, P.; Martínez, B.; Melià-Seguí, J.; Watteyne, T. Understanding the Limits of LoRaWAN. IEEE Commun. Mag. 2017, 55, 34–40. [Google Scholar] [CrossRef]
- Georgiou, O.; Raza, U. Low Power Wide Area Network Analysis: Can LoRa Scale? IEEE Wirel. Commun. Lett. 2017, 6, 162–165. [Google Scholar] [CrossRef]
- Bankov, D.; Khorov, E.; Lyakhov, A. Mathematical model of LoRaWAN channel access. In Proceedings of the IEEE 18th International Symposium on A World of Wireless, Mobile and Multimedia Networks (WoWMoM), Macau, China, 12–15 June 2017; pp. 1–3. [Google Scholar] [CrossRef]
- Bor, M.C.; Roedig, U.; Voigt, T.; Alonso, J.M. Do LoRa Low-Power Wide-Area Networks Scale? In Proceedings of the 19th ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems (MSWiM ’16), Malta, 13–17 November 2016; ACM: New York, NY, USA, 2016; pp. 59–67. [Google Scholar] [CrossRef]
- Bankov, D.; Khorov, E.; Lyakhov, A. On the Limits of LoRaWAN Channel Access. In Proceedings of the International Conference on Engineering and Telecommunication (EnT), Moscow, Russia, 29–30 November 2016. [Google Scholar]
- Mikhaylov, K.; Petaejaejaervi, J.; Haenninen, T. Analysis of Capacity and Scalability of the LoRa Low Power Wide Area Network Technology. In Proceedings of the 22th European Wireless Conference, Oulu, Finland, 18–20 May 2016. [Google Scholar]
- Croce, D.; Gucciardo, M.; Mangione, S.; Santaromita, G.; Tinnirello, I. Impact of LoRa Imperfect Orthogonality: Analysis of Link-Level Performance. IEEE Commun. Lett. 2018, 22, 796–799. [Google Scholar] [CrossRef]
- Haxhibeqiri, J.; Abeele, F.V.D.; Moerman, I.; Hoebeke, J. LoRa Scalability: A Simulation Model Based on Interference Measurements. Sensors 2017, 17, 1193. [Google Scholar] [CrossRef] [PubMed]
- Rahmadhani, A.; Kuipers, F. When LoRaWAN Frames Collide. In Proceedings of the 12th International Workshop on Wireless Network Testbeds, Experimental Evaluation & Characterization, New Delhi, India, 29 October–2 November 2018; pp. 89–97. [Google Scholar] [CrossRef]
- LoRaWAN 1.1 Specification. Available online: https://lora-alliance.org/resource-hub/lorawantm-specification-v11 (accessed on 6 April 2019).
- Li, S.; Raza, U.; Khan, A. How Agile is the Adaptive Data Rate Mechanism of LoRaWAN? In Proceedings of the IEEE Global Communications Conference, GLOBECOM 2018, Abu Dhabi, UAE, 9–13 December 2018; pp. 206–212. [Google Scholar] [CrossRef]
- Loubany, A.; Lahoud, S.; El Chall, R. Adaptive algorithm for spreading factor selection in LoRaWAN networks with multiple gateways. Comput. Netw. 2020, 182, 107491. [Google Scholar] [CrossRef]
- Dawaliby, S.; Bradai, A.; Pousset, Y. Joint slice-based spreading factor and transmission power optimization in LoRa smart city networks. Internet Things 2019, 100121. [Google Scholar] [CrossRef]
- Lim, J.; Han, Y. Spreading Factor Allocation for Massive Connectivity in LoRa Systems. IEEE Commun. Lett. 2018, 22, 800–803. [Google Scholar] [CrossRef]
- Reynders, B.; Wang, Q.; Tuset-Peiró, P.; Vilajosana, X.; Pollin, S. Improving Reliability and Scalability of LoRaWANs Through Lightweight Scheduling. IEEE Internet Things J. 2018, 5, 1830–1842. [Google Scholar] [CrossRef]
- Slabicki, M.; Premsankar, G.; Di Francesco, M. Adaptive configuration of lora networks for dense IoT deployments. In Proceedings of the NOMS 2018—2018 IEEE/IFIP Network Operations and Management Symposium, Taipei, Taiwan, 23–27 April 2018; pp. 1–9. [Google Scholar] [CrossRef]
- Lee, J.; Jeong, W.; Choi, B. A Scheduling Algorithm for Improving Scalability of LoRaWAN. In Proceedings of the 2018 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 17–19 October 2018; pp. 1383–1388. [Google Scholar] [CrossRef]
- Reynders, B.; Meert, W.; Pollin, S. Power and spreading factor control in low power wide area networks. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Cuomo, F.; Campo, M.; Caponi, A.; Bianchi, G.; Rossini, G.; Pisani, P. EXPLoRa: Extending the performance of LoRa by suitable spreading factor allocations. In Proceedings of the 2017 IEEE 13th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Rome, Italy, 9–11 October 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Zorbas, D.; Abdefadeel, K.Q.; Cionca, V.; Pesch, D.; O’Flynn, B. Offline scheduling algorithms for time-slotted lora-based bulk data transmission. In Proceedings of the IEEE 5th World Forum on Internet of Things (WF- IoT), Limerick, Ireland, 15–18 April 2019. [Google Scholar]
- Piyare, R.; Murphy, A.; Magno, M.; Benini, L. On-Demand LoRa: Asynchronous TDMA for Energy Efficient and Low Latency Communication in IoT. Sensors 2018, 18, 3718. [Google Scholar] [CrossRef] [PubMed]
- Haxhibeqiri, J.; Moerman, I.; Hoebeke, J. Low overhead scheduling of lora transmissions for improved scalability. IEEE Internet Things J. 2018. [Google Scholar] [CrossRef]
- Bankov, D.; Khorov, E.; Lyakhov, A. LoRaWAN Modeling and MCS Allocation to Satisfy Heterogeneous QoS Requirements. Sensors 2019, 19, 4204. [Google Scholar] [CrossRef] [PubMed]
- Farooq, M.O.; Pesch, D. A Search into a Suitable Channel Access Control Protocol for LoRa-Based Networks. In Proceedings of the IEEE 43rd Conference on Local Computer Networks (LCN), Chicago, IL, USA, 1–4 October 2018; pp. 283–286. [Google Scholar] [CrossRef]
- Pham, C. Investigating and Experimenting CSMA Channel Access Mechanisms for Long-Range LoRa IoT Networks. In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference (WCNC), Barcelona, Spain, 15–18 April 2018. [Google Scholar]
- Ahsan, S.; Hassan, S.A.; Adeel, A.; Qureshi, H.K. Improving Channel Utilization of LoRaWAN by using Novel Channel Access Mechanism. In Proceedings of the 15th International Wireless Communications Mobile Computing Conference (IWCMC), Tangier, Morocco, 24–28 June 2019; pp. 1656–1661. [Google Scholar]
- O’Kennedy, M.; Niesler, T.; Wolhuter, R.; Mitton, N. Practical evaluation of carrier sensing for a LoRa wildlife monitoring network. In Proceedings of the IFIP Networking Conference (Networking), Paris, France, 22–26 June 2020; pp. 614–618. [Google Scholar]
- Gamage, A.; Liando, J.C.; Gu, C.; Tan, R.; Li, M. LMAC: Efficient Carrier-Sense Multiple Access for LoRa. In Proceedings of the the 26th Annual International Conference on Mobile Computing and Networking (MobiCom ’20), London, UK, 21–25 September 2020; ACM: New York, NY, USA, 2020. [Google Scholar]
- Semtech. Application Note: SX126x CAD Performance Evaluation Rev.2.1-11/2019. 2019. Available online: https://lora-developers.semtech.com/ (accessed on 24 January 2021).
- Pham, C. A DIY Low-Cost LoRa Gateway. Available online: http://cpham.perso.univ-pau.fr/LORA/RPIgateway.htmlandhttps://github.com/CongducPham/LowCostLoRaGw (accessed on 24 January 2021).
- Pozza, R.; Nati, M.; Georgoulas, S.; Moessner, K.; Gluhak, A. Neighbor Discovery for Opportunistic Networking in Internet of Things Scenarios: A Survey. IEEE Access 2015, 3, 1101–1131. [Google Scholar] [CrossRef]
- McGlynn, M.J.; Borbash, S.A. Birthday Protocols for Low Energy Deployment and Flexible Neighbor Discovery in Ad Hoc Wireless Networks. In Proceedings of the 2nd ACM International Symposium on Mobile Ad Hoc Networking & Computing (MobiHoc’01), Long Beach, CA, USA, 4–5 October 2001; Association for Computing Machinery: New York, NY, USA, 2001; pp. 137–145. [Google Scholar] [CrossRef]
- Meng, T.; Wu, F.; Chen, G. On designing neighbor discovery protocols: A code-based approach. In Proceedings of the IEEE INFOCOM 2014—IEEE Conference on Computer Communications, Toronto, ON, Canada, 27 April–2 May 2014; pp. 1689–1697. [Google Scholar] [CrossRef]
- Bakht, M.; Trower, M.; Kravets, R.H. Searchlight: Won’t You Be My Neighbor? In Proceedings of the 18th Annual International Conference on Mobile Computing and Networking (Mobicom ’12), Istanbul, Turkey, 22–26 August 2012; Association for Computing Machinery: New York, NY, USA, 2012; pp. 185–196. [Google Scholar] [CrossRef]
- Qiu, Y.; Li, S.; Xu, X.; Li, Z. Talk more listen less: Energy-efficient neighbor discovery in wireless sensor networks. In Proceedings of the IEEE INFOCOM 2016—The 35th Annual IEEE International Conference on Computer Communications, San Francisco, CA, USA, 10–14 April 2016; pp. 1–9. [Google Scholar] [CrossRef]
- Kindt, P.H.; Yunge, D.; Reinerth, G.; Chakraborty, S. Griassdi: Mutually Assisted Slotless Neighbor Discovery. In Proceedings of the 16th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN), Pittsburgh, PA, USA, 18–21 April 2017; pp. 93–104. [Google Scholar]
- Ye, W.; Heidemann, J.; Estrin, D. Medium access control with coordinated adaptive sleeping for wireless sensor networks. IEEE/ACM Trans. Netw. 2004, 12, 493–506. [Google Scholar] [CrossRef]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pham, C.; Ehsan, M. Dense Deployment of LoRa Networks: Expectations and Limits of Channel Activity Detection and Capture Effect for Radio Channel Access. Sensors 2021, 21, 825. https://doi.org/10.3390/s21030825
Pham C, Ehsan M. Dense Deployment of LoRa Networks: Expectations and Limits of Channel Activity Detection and Capture Effect for Radio Channel Access. Sensors. 2021; 21(3):825. https://doi.org/10.3390/s21030825
Chicago/Turabian StylePham, Congduc, and Muhammad Ehsan. 2021. "Dense Deployment of LoRa Networks: Expectations and Limits of Channel Activity Detection and Capture Effect for Radio Channel Access" Sensors 21, no. 3: 825. https://doi.org/10.3390/s21030825
APA StylePham, C., & Ehsan, M. (2021). Dense Deployment of LoRa Networks: Expectations and Limits of Channel Activity Detection and Capture Effect for Radio Channel Access. Sensors, 21(3), 825. https://doi.org/10.3390/s21030825