
Robust Silent Localization of Underwater Acoustic Sensor Network Using Mobile Anchor(s)



Abstract
1. Introduction
1.1. Network Localization: Challenges and Related Works
1.2. Objectives and Contributions
- In general, range-based localization is a non-convex optimization problem, i.e., not easy to find global solution, as discussed in Section 2. We present guidelines to deploy the anchors in certain feasible geometrical configurations that guarantees to find the correct solution using simple (computationally less expensive) solvers. Furthermore, we present two simple solvers and compare their performances to suggest when to use one over others.
- To devise a robust location estimator, an appropriate model of the measurement errors is essential. We advocate that the modified UWB S-V model with certain adaptations is a fairly suitable statistical model for characterizing the acoustic multipath propagation. Using the modified UWB S-V model with certain practical assumptions, we propose that the errors in range-difference measurements can be appropriately modeled by an i.i.d. Laplacian distribution, which has possibilities of outliers in the measurements.
- To mitigate the errors, we present three robust location estimators: Least-Absolute-Deviations (LAD), Least-Median-Squares (LMedS), and RANdom Sample Consensus (RANSAC), which appropriately use the two simple solvers to keep computational expenses low. We perform rigorous simulations under relevant noise settings to compare the performance of the three robust estimators. Based on the simulation results, we present guidelines to select one of the robust estimators over others depending upon the noisy environment and computational budget of the sensors.
- To avoid deployment and maintenance of multiple permanent anchors required for robust location estimation, we propose three practical schemes to perform TDoA measurements using a combination of a static and a mobile anchor or a single mobile or multiple mobile anchors. The schemes are adaptable to the scale of the networks, resources available at hand, and required robustness in the estimated locations.
- Combining a mobile anchor scheme with a robust location estimator, we propose a complete package of an efficient, robust, and practically usable localization scheme for low-cost low-power UWASNs.
1.3. Structure of Paper
1.4. Notations
2. TDoA-Based Localization: Problem Formulation
3. Silent Underwater Positioning Scheme
3.1. Range-Difference Measurement Phase
3.2. Multilateration Phase
- when more than three anchors (including lead) are present
- when the sensor lies within convex-hull of the anchors
- when the anchors are placed in a symmetric fashion
3.3. Comparing CF and GN Methods
- mean-L2-norm-error defined as: ,
- std-L2-norm-error defined as: ,
- In Figure 4, plots (a–e) show the localizable regions by the two methods without noise in measurements and plots (e–i) show the mean-L2-norm-error map with i.i.d. Gaussian noise in measurements. These plots clearly show that symmetric deployment of anchors is essential to have large localizable area in the ROI. Moreover, the GN method results into larger localizable area with lower location errors than the CF method for the same number of anchors taking part in measurements.
- In Figure 5, the plots show the mean-L2-norm-error map with i.i.d. Gaussian noise in and when the ROI is almost contained within the convex hull of the anchors. These assert that the GN method produces overall lower location errors than CF method.
4. Underwater Acoustic Channel Modeling
5. Modeling Errors in Range-Difference Measurements
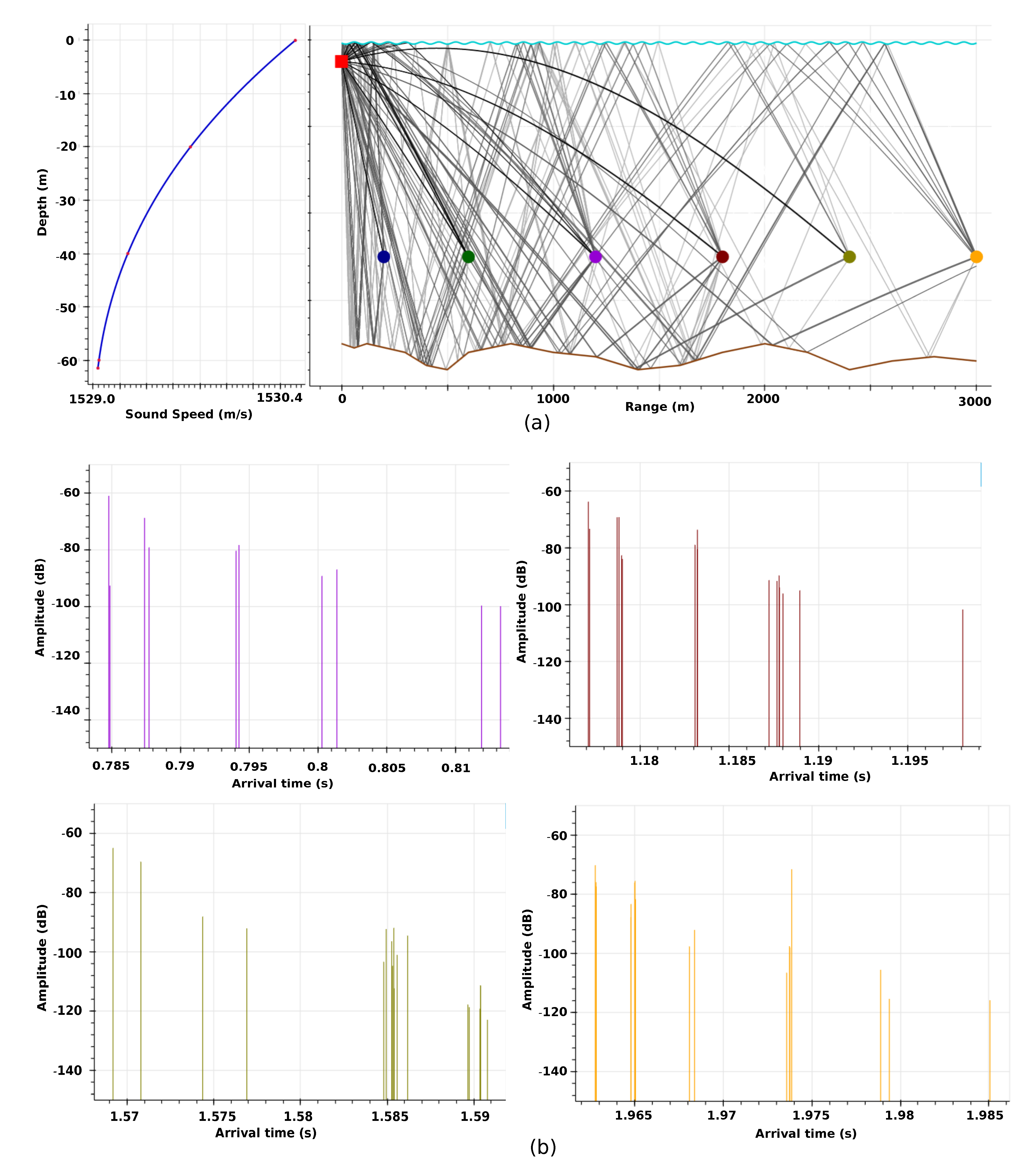
- In shallow sea, numerous eigenpaths and eigenrays arrive at the receivers with significant strength and their strength decays slowly, whereas in deep sea, only few eigenpath and eigenrays arrive at the receivers with significant strength and their strength decay fast.
- Densely packed eigenrays in a eigenpath are generally non-resolvable.
- The vertical links exhibit narrower multipath spreading, while slant and horizontal links exhibit wider multipath spreading ranging from a few to hundreds of milliseconds; larger the distance between transmitter and receiver, higher are the chances of wider spreading.
- In the case of slant and horizontal links, often there is no direct ray arriving at the receiver distant from a transmitter.
6. Robust Location Estimators
6.1. LAD Estimator
| Algorithm 1: Least-Absolute-Squares (LAD) Robust Location Estimator |
 |
6.2. LMedS Estimator
| Algorithm 2: Least-Median-Squares (LMedS) Robust Location Estimator |
 |
6.3. RANSAC Estimator
| Algorithm 3: RANSAC Robust Location Estimator |
 |
7. Localization Using Surface Mobile Anchor(s)
7.1. A Stationary and a Mobile Anchor
7.2. A Single Mobile Anchor
7.3. Two Mobile Anchors and More
7.4. Parameter Selection: Location Accuracy and Overall Cost Trade-Off
8. Simulations and Results
8.1. BELLHOP Ray Tracing to Study Acoustic Multipath Propagation
8.2. Comparing the Robust Location Estimators
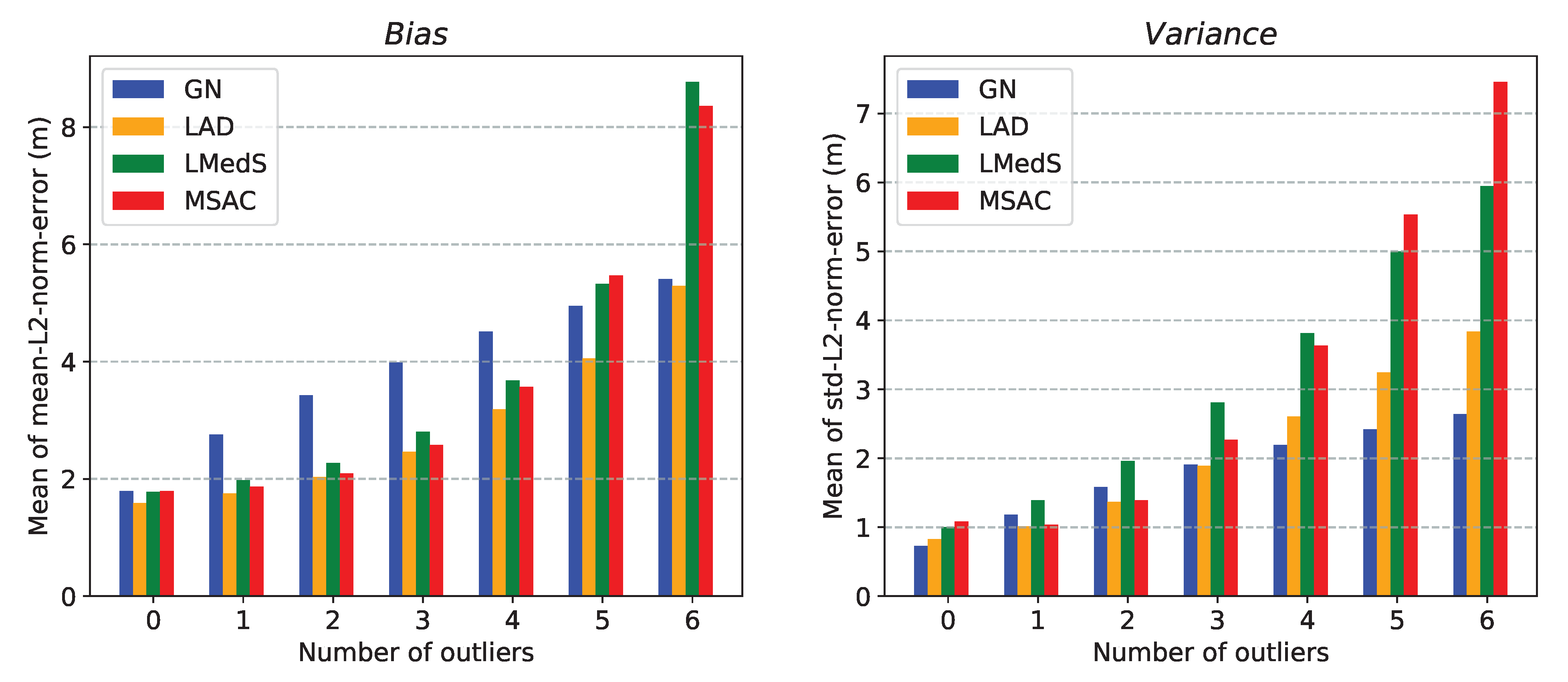
8.2.1. Gaussian Noise
- In the case of no outliers, the RANSAC performed similar to the GN method, whereas the LAD performed slightly lower than the GN method and the LMedS performs slightly lower than all of the estimators in term of both the metrics (bias and variance).
- -
- The GN method solves an MLE under Gaussian noise condition, thus it performs better than others. The improvisation in the RANSAC makes it behave like an MLE under Gaussian noise in absence of outliers. The LAD and the LMedS estimators are not optimal under Gaussian noise condition.
- In the presence of outliers and low-level noise in the inlier measurements (1st row of Figure 7), the LMedS and RANSAC performed similar to each other, whereas the LAD performed lower than the two in term of both the metrics.
- -
- The LMedS and the RANSAC exclusively filter out the outliers and use the LS for their final estimates, whereas the LAD does not exclusively filter out the outliers but weighs them according to their errors from the best fit; thus, some reminiscent of the outliers affect the final estimate. Moreover, the LAD is not optimal estimator under Gaussian noise condition.
- In the presence of outliers and high-level noise in the inlier measurements (3rd row of Figure 7), the RANSAC performs slightly better than the others in term of the bias. The LAD and the LMedS performed similarly to each other in the term of the bias but the LAD performed better than the other two in the term of the variance, specifically when there are a high number of outliers.
- -
- Again, the LAD and the LMedS are not optimal estimators under Gaussian noise condition while the improvisation in the RANSAC makes it behave like an MLE under Gaussian noise condition on the selected inliers. The GN and the LAD are solving MLE, thus their variance should be lower than non-MLE estimators.
- In the case of low-level noise in the inlier measurements (1st row of Figure 7), a noticeable breakdown happened for LMedS when the number of outliers is 6 (i.e., more than ), while the LAD and RANSAC were on the verge of breakdown. However, in the case of high-level noise (3rd row of Figure 7), the breakdown happened for all the three robust estimators, but the LAD still performed marginally better than the other two robust estimators.
- -
- Theoretically, the LMedS can handle up to outliers, whereas the RANSAC can cope with more than of outliers in a large set of data points. Similarly, the LAD can also cope with a high number of outliers in Y-space. In presence of high noise in the inlier measurements, there are high chances that one of the inliers out of the four can lie far away from others; thus, the RANSAC leaves the inlier and instead selects the outlier in the final estimate. The LAD involves all the available measurements but weighs them according to their errors from the best fit model at each iteration. Thus, this ensures that the LAD does not perform worse than the GN method if the initial solution was selected close enough to the global solution.
- The third row in Figure 7 show that the LMedS and RANSAC can find the robust estimates without searching over all the possible subsets, e.g., 35 iterations are sufficient to have chance of getting a good subset when measurements are outliers.
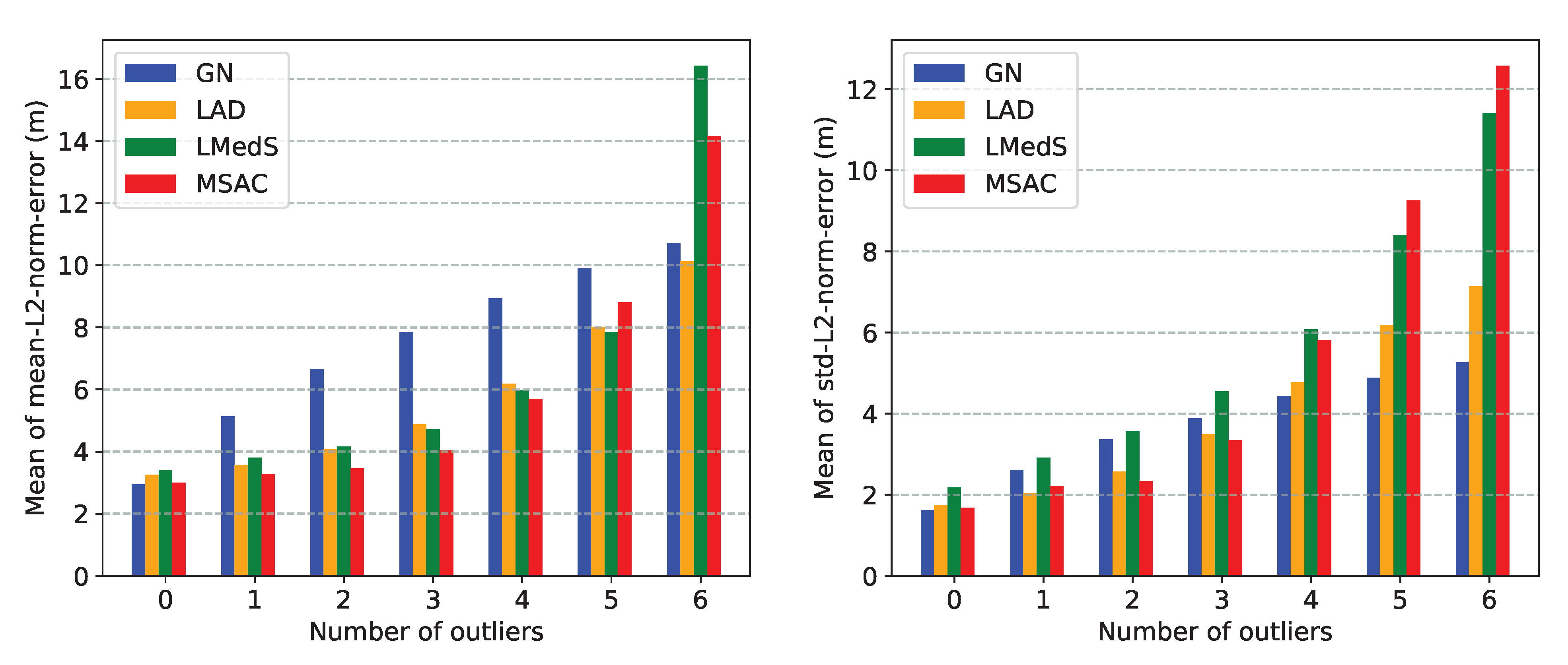
8.2.2. Laplacian Noise
- In the case of no outliers, the LAD estimator performed slightly better than all the other estimators in terms of the bias and almost similar to the GN method in terms of variance.
- -
- The LAD is an MLE under the Laplacian noise condition.
- In the presence of outliers and low-level noise in the inlier measurements, which are well separable from outlier measurements (1st row of Figure 8), the LMedS and the RANSAC performed similar to each other and better than the LAD in the term of both the metrics.
- -
- The LMedS and the RANSAC exclusively filter out the outliers and use the LS for the final estimate, whereas the LAD does not exclusively filter out the outliers but weighs them according to their errors from the best fit model; thus, some reminiscent of the outliers may deteriorate the final estimate.
- In presence of either high-level noise in the inlier measurements (2nd row of Figure 8), the LAD and the RANSAC performed similar to each other and slightly better than the LMedS in term of the bias, while the LAD performed better than the other two robust estimators in term of variance.
- In presence of low-level noise in the inlier measurements (1st row of Figure 8), the breakdown happened only for the LMedS when there were more than outliers, otherwise, the breakdown happened for both the LMedS and the RANSAC.
- -
- As discussed above, the LMedS cannot handle more than outliers. The RANSAC can cope with more than outliers, but when the inlier and outlier measurements are well separable. However, in the case of high-level noise, the inliers are outliers are not well separated and the RANSAC leaves an inlier and instead selects an outlier in its final estimate. The LAD involves all the available measurements but weighs them inversely according to their errors from the best fit model at each iteration. Thus, this ensures that the LAD does not perform worse than the GN method if the initial solution was selected close enough to the global solution.
8.2.3. Laplacian Noise with Distance Dependent Scale
9. Summary and Discussion
10. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A.
Appendix A.1. Gauss–Newton (GN) Method
- Start with a good initial guess
- Take next step:
- Repeat step 2, until , where is sufficiently small value.
Appendix A.2. Close-Form (CF) Method
Appendix B.


References
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Challenges for efficient communication in underwater acoustic sensor networks. ACM SIGBED Rev. 2004, 1, 3–8. [Google Scholar] [CrossRef]
- Lui, L.; Zhou, S.; Cui, J.H. Prospect and problems of wireless communication for underwater sensor networks. Wirel. Commun. Mob. Comput. 2008, 8, 977–994. [Google Scholar]
- Stojanovic, M.; Beaujean, P.P. Acoustic Communication. In Handbook of Ocean Engineering, 1st ed.; Dhanak, M.R., Xiros, N.I., Eds.; Springer: Berlin/Heidelberg, Germany, 2016; Chapter 15; pp. 359–386. [Google Scholar]
- Heidemann, J.; Stojanovic, M.; Zorzi, M. Underwater sensor networks: Applications, advances and challenges. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2012, 370, 158–175. [Google Scholar] [CrossRef] [PubMed]
- Pu, L.; Luo, Y.; Mo, H.; Le, S.; Peng, Z.; Cui, J.H.; Jiang, Z. Comparing underwater MAC protocols in real sea experiments. Comput. Commun. 2015, 56, 47–59. [Google Scholar] [CrossRef]
- Morozs, N.; Mitchell, P.; Zakharov, Y. TDA-MAC: TDMA Without Clock Synchronization in Underwater Acoustic Networks. IEEE Access 2018, 6, 1091–1108. [Google Scholar] [CrossRef]
- Morozs, N.; Mitchell, P.D.; Zakharov, Y.; Mourya, R.; Petillot, Y.R.; Gibney, T.; Dragone, M.; Sherlock, B.; Neasham, J.A.; Tsimenidis, C.C.; et al. Robust TDA-MAC for practical underwater sensor network deployment: Lessons from usmart sea trials. In Proceedings of the ACM International Conference on Underwater Networks and Systems, Shenzhen, China, 3–5 December 2018; pp. 1–8. [Google Scholar]
- Mourya, R.; Saafin, W.; Dragone, M.; Petillot, Y. Ocean Monitoring Framework based on Compressive Sensing using Acoustic Sensor Networks. In Proceedings of the OCEANS 2018, MTS/IEEE, Charleston, SC, USA, 22–25 October 2018; pp. 1–10. [Google Scholar]
- Erol-Kantarci, M.; Mouftah, H.T.; Oktug, S. Localization techniques for underwater acoustic sensor networks. IEEE Commun. Mag. 2010, 48, 152–158. [Google Scholar] [CrossRef]
- Han, G.; Jiang, J.; Shu, L.; Xu, Y.; Wang, F. Localization Algorithms of Underwater Wireless Sensor Networks: A Survey. Sensors 2012, 12, 2026–2061. [Google Scholar] [CrossRef]
- Li, X.; Deng, Z.; Rauchenstein, L.; Carlson, T.J. Contributed Review: Source-localization algorithms and applications using time of arrival and time difference of arrival measurements. Rev. Sci. Instrum. 2016, 87, 13. [Google Scholar] [CrossRef]
- Zekavat, S.R.; Buehrer, R.M. Handbook of Position Location-Theory, Practice and Advances, 1st ed.; IEEE Press: Piscataway Township, NJ, USA, 2019; p. 1376. [Google Scholar]
- Cheng, X.; Thaeler, A.; Xue, G.; Chen, D. TSP: A Time-Based Positioning Scheme for Outdoor Wireless Sensor Networks. In Proceedings of the IEEE INFOCOM, Hong Kong, China, 7–11 March 2004; pp. 2685–2696. [Google Scholar]
- Cheng, X.; Shu, H.; Liang, Q.; Du, D.H.C. Silent positioning in underwater acoustic sensor networks. IEEE Trans. Veh. Technol. 2008, 57, 1756–1766. [Google Scholar] [CrossRef]
- Stojanovic, M.; Preisig, J. Underwater Acoustic Communication Channels: Propagation Models and Statistical Characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- Loubet, G.; Capellano, V.; Filipiak, R.; Npgrenoble, C.; Hres, S.M. Underwater Spread-Spectrum Communications. In Proceedings of the OCEANS1997, MTS/IEEE Halifax, Halifax, NS, Canada, 6–9 October 1997; IEEE: Halifax, NS, Canada, 1997; pp. 574–579. [Google Scholar]
- Pursley, M.B. Direct-sequence spread-spectrum communications for multipath channels. IEEE Trans. Microw. Theory Tech. 2002, 50, 653–661. [Google Scholar] [CrossRef]
- Porter, M.B.; Bucker, H.P. Gaussian beam tracing for computing ocean acoustic fields. J. Acoust. Soc. Am. 1987, 82, 1349–1359. [Google Scholar] [CrossRef]
- Jensen, F.B.; Kuperman, W.A.; Porter, M.B.; Schmidt, H. Computational Ocean Acoustics, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2011; Volume 8, p. 813. [Google Scholar]
- Peterson, J.C.; Porter, M.B. Ray/beam tracing for modeling the effects of ocean and platform dynamics. IEEE J. Ocean. Eng. 2013, 38, 655–665. [Google Scholar] [CrossRef]
- Tindle, C.T. Wavefronts and waveforms in deep-water sound propagation. J. Acoust. Soc. Am. 2002, 112, 464–475. [Google Scholar] [CrossRef]
- Morozs, N.; Gorma, W.; Henson, B.T.; Shen, L.; Mitchell, P.D.; Zakharov, Y.V. Channel Modeling for Underwater Acoustic Network Simulation. IEEE Access 2020, 8, 136151–136175. [Google Scholar] [CrossRef]
- Catipovic, J.; Baggeroer, A.; Von Der Heydt, K.; Koelsch, D. Design and performance analysis of a Digital Acoustic Telemetry System for the short range underwater channel. IEEE J. Ocean. Eng. 1984, 9, 242–252. [Google Scholar] [CrossRef]
- Chitre, M. A high-frequency warm shallow water acoustic communications channel model and measurements. J. Acoust. Soc. Am. 2007, 122, 2580. [Google Scholar] [CrossRef]
- Kim, S.M.; Byun, S.H.; Kim, S.G.; Kim, D.J.; Kim, S.; Lim, Y.K. Underwater acoustic channel characterization at 6 kHz and 12 kHz in a shallow water near Jeju Island. In Proceedings of the OCEANS 2013, MTS/IEEE, San Diego, San Diego, CA, USA, 21–25 October 2013; pp. 1–4. [Google Scholar]
- Jobst, W.; Zabalgogeazcoa, X. Coherence estimates for signals propagated through acoustic channels with multiple paths. J. Acoust. Soc. Am. 1979, 65, 622–630. [Google Scholar] [CrossRef]
- Geng, X.; Zielinski, A. An Eigenpath Underwater Acoustic Communication Channel Model. In Proceedings of the OCEANS 1995, MTS/IEEE, San Diego, San Diego, CA, USA, 9–12 October 1995; pp. 1189–1196. [Google Scholar]
- Radosevic, A.; Proakis, J.G.; Stojanovic, M. Statistical characterization and capacity of shallow water acoustic channels. In Proceedings of the OCEANS 2009, MTS/IEEE EUROPE, Bremen, Germany, 11–14 May 2009; pp. 1–8. [Google Scholar]
- Yang, W.B.; Yang, T.C. Characterization and Modeling of Underwater Acoustic Communications Channels for Frequency-Shift-Keying Signals. In Proceedings of the OCEANS 2006, MTS/IEEE Boston, Boston, MA, USA, 18–21 September 2006; pp. 1–6. [Google Scholar]
- Zhang, J.; Cross, J.; Zheng, Y.R. Statistical channel modeling of wireless shallow water acoustic communications from experiment data. In Proceedings of the Military Communication Conference, San Jose, CA, USA, 31 October–3 November 2010; pp. 2412–2416. [Google Scholar]
- Qarabaqi, P.; Stojanovic, M. Statistical Characterization of Computationally Efficient Modeling of a Class of Underwater Acoustic Communication Channels. IEEE J. Ocean. Eng. 2013, 38, 701–717. [Google Scholar] [CrossRef]
- Saleh, A.A.; Valenzuela, R.A. A Statistical Model for Indoor Multipath Propagation. IEEE J. Sel. Areas Commun. 1987, 5, 128–137. [Google Scholar] [CrossRef]
- Molisch, A.F. Ultra-wide-band propagation channels. Proc. IEEE 2009, 97, 353–371. [Google Scholar] [CrossRef]
- Diamant, R.; Hwee-Pink, T.; Lampe, L. NLOS identification using a hybrid ToA-signal strength algorithm for underwater acoustic localization. In Proceedings of the OCEANS 2010, MTS/IEEE SEATTLE, Seattle, WA, USA, 20–23 September 2010; pp. 1–7. [Google Scholar]
- Diamant, R.; Tan, H.P.; Lampe, L. LOS and NLOS classification for underwater acoustic localization. IEEE Trans. Mob. Comput. 2014, 13, 311–323. [Google Scholar] [CrossRef]
- Aditya, S.; Molisch, A.F.; Behairy, H.M. A Survey on the Impact of Multipath on Wideband Time-of-Arrival Based Localization. Proc. IEEE 2018, 106, 1183–1203. [Google Scholar] [CrossRef]
- Mortazavi, E.; Javidan, R.; Dehghani, M.J.; Kavoosi, V. A robust method for underwater wireless sensor joint localization and synchronization. Ocean. Eng. 2017, 137, 276–286. [Google Scholar] [CrossRef]
- Birkes, D.; Dodge, Y. Alternative Methods of Regression, 1st ed.; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 1993; p. 248. [Google Scholar]
- Zoubir, A.M.; Koivunen, V.; Ollila, E.; Muma, M. Robust Statistics for Signal Processing, 1st ed.; Cambridge University Press: Cambridge, UK, 2019; Volume 53, pp. 1689–1699. [Google Scholar]
- Kay, S.M. Fundamentals of Statistical Processing, Volume I: Estimation Theory; Printice Hall: Upper Saddle River, NJ, USA, 1993; p. 589. [Google Scholar]
- Nocedal, J.; Wright, S.J. Numerical Optimization, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2006; p. 683. [Google Scholar]
- Cheung, K.W.; Ma, W.K.; So, H. Accurate Approximation Algorithm for ToA-based Maximum Likelihood Mobile Location Using Semidefinite Programming. In Proceedings of the 2004 IEEE International Conference on Acoustics, Speech, and Signal Processing, Montreal, QC, Canada, 17–21 May 2004; IEEE: Montreal, QC, Canada, 2004; pp. 145–148. [Google Scholar]
- Gholami, M.R.; Tetruashvili, L.; Ström, E.G.; Censor, Y. Cooperative wireless sensor network positioning via implicit convex feasibility. IEEE Trans. Signal Process. 2013, 61, 5830–5840. [Google Scholar] [CrossRef]
- Soares, C.; Xavier, J.; Gomes, J. Simple and fast convex relaxation method for cooperative localization in sensor networks using range measurements. IEEE Trans. Signal Process. 2015, 63, 1–12. [Google Scholar] [CrossRef]
- Tseng, P. Second Order Cone Programming Relaxation of Sensor Network Localization. SIAM J. Optim. 2007, 18, 156–185. [Google Scholar] [CrossRef]
- Srirangarajan, S.; Tewfik, A.H.; Luo, Z.Q. Distributed Sensor Network Localization Using SOCP Relaxation. IEEE Trans. Wirel. Commun. 2008, 7, 10. [Google Scholar] [CrossRef]
- Nie, J. Sum of squares method for sensor network localization. Comput. Optim. Appl. 2009, 43, 151–179. [Google Scholar] [CrossRef]
- Beck, A.; Stoica, P.; Li, J. Exact and approximate solutions of source localization problems. IEEE Trans. Signal Process. 2008, 56, 1770–1778. [Google Scholar] [CrossRef]
- Heitsenrether, R.M.; Badiey, M. Modeling Acoustic Signal Fluctuations Induced by Sea Surface Roughness. AIP Conf. Proc. 2004, 728, 214–221. [Google Scholar]
- Socheleau, F.X.; Laot, C.; Passerieux, J.M. Stochastic replay of non-WSSUS underwater acoustic communication channels recorded at sea. IEEE Trans. Signal Process. 2011, 59, 4838–4849. [Google Scholar] [CrossRef]
- Stojanovic, M. Underwater Acoustic Communications: Design Consideration on the Physical Layer. In Proceedings of the Fifth Annual Conference on Wireless on Demand Network Systems and Services, Garmisch-Partenkirchen, Germany, 23–25 January 2008; IEEE Xplore: Garmisch-Partenkirchen, Germany, 2008; Volume 1. [Google Scholar]
- Bingham, B.; Blair, B.; Mindell, D. On the design of direct sequence spread-spectrum signaling for range estimation. In Proceedings of the OCEANS 2007, MTS/IEEE Vancouver, Vancouver, BC, Canada, 29 September–4 October 2007; pp. 1–7. [Google Scholar]
- Sherlock, B.; Neasham, J.A.; Tsimenidis, C.C. Spread-Spectrum Techniques for Bio-Friendly Underwater Acoustic Communications. IEEE Access 2018, 6, 4506–4520. [Google Scholar] [CrossRef]
- Edgeworth, F.Y. On Observations Relating to Several Quantities. Hermathena 1887, 6, 279–285. [Google Scholar]
- Burrus, C.S.; Barreto, J.A.; Selesnick, I.W. Iterative Reweighted Least-Squares Design of FIR Filters. IEEE Trans. Signal Process. 1994, 42, 2926–2936. [Google Scholar] [CrossRef]
- Huber, P.J.; Ronchetti, E.M. Robust Statistics. In Robust Statistics, 2nd ed.; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2009; p. 363. [Google Scholar]
- Siegel, A.F. Robust Regression Using Repeated Medians. Biometrika 1982, 69, 242–244. [Google Scholar] [CrossRef]
- Rousseeuw, P.J. Least Median of Squares Regression. J. Am. Stat. Assoc. 1984, 79, 871–880. [Google Scholar] [CrossRef]
- Hartley, R.I.; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Torr, P.H.; Zisserman, A. MLESAC: A new robust estimator with application to estimating image geometry. Comput. Vis. Image Underst. 2000, 78, 138–156. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (a) | |||||
|---|---|---|---|---|---|
| STD (in ms) | |||||
| Errors in | 0.001 | 0.002 | 0.003 | ||
| Methods | bias (in m) | ||||
| GN | 1.6612 | 3.3226 | 4.9842 | ||
| CF | 4.4564 | 8.9129 | 13.3698 | ||
| variance (in m) | |||||
| GN | 0.9548 | 1.9098 | 2.8651 | ||
| CF | 3.0070 | 6.0148 | 9.0237 | ||
| (b) | |||||
| Numbers of Anchors | |||||
| 4 | 7 | 10 | 13 | 16 | |
| Methods | bias (in m) | ||||
| GN | 5.8692 | 4.1281 | 3.6393 | 3.3226 | 3.2494 |
| CF | 14.3327 | 11.1886 | 9.78817 | 8.9129 | 8.4743 |
| variance (in m) | |||||
| GN | 3.3469 | 2.2586 | 2.0275 | 1.9098 | 1.9071 |
| CF | 9.5370 | 7.5355 | 6.5978 | 6.0148 | 5.8165 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mourya, R.; Dragone, M.; Petillot, Y. Robust Silent Localization of Underwater Acoustic Sensor Network Using Mobile Anchor(s). Sensors 2021, 21, 727. https://doi.org/10.3390/s21030727
Mourya R, Dragone M, Petillot Y. Robust Silent Localization of Underwater Acoustic Sensor Network Using Mobile Anchor(s). Sensors. 2021; 21(3):727. https://doi.org/10.3390/s21030727
Chicago/Turabian StyleMourya, Rahul, Mauro Dragone, and Yvan Petillot. 2021. "Robust Silent Localization of Underwater Acoustic Sensor Network Using Mobile Anchor(s)" Sensors 21, no. 3: 727. https://doi.org/10.3390/s21030727
APA StyleMourya, R., Dragone, M., & Petillot, Y. (2021). Robust Silent Localization of Underwater Acoustic Sensor Network Using Mobile Anchor(s). Sensors, 21(3), 727. https://doi.org/10.3390/s21030727