1. Introduction
Teleoperation helps perform long-distance interaction tasks and thus ensures operation safety. A network-based communication channel isolates a human operator from a potentially hazard interaction environment, which is therefore regarded as the special case of cyber-physical systems. In this regard, teleoperation triggers the systemic revolution of human-in-the-loop operation [
1], providing a universal platform to medical diagnosis [
2] and fault diagnosis [
3,
4,
5] for industrial applications, which has been widely applied to space robotics [
6,
7,
8,
9], medical surgery [
10,
11,
12,
13] and deep-sea exploration [
14,
15].
Regarding complex teleoperation tasks, the traditional single-master/single-slave (SM/SS) mode cannot meet the increased requirements of robustness and flexibility. Therefore, introducing another operator becomes a possible solution to extend teleoperation applications [
16,
17]. In contrast to SM/SS mode, multi-master/single-slave (MM/SS) teleoperation can be applied to online training and multiple manipulator collaboration, where shared commands at master side are integrated and sent to the slave robot via weight distribution. The reliability and effectiveness can be enhanced by MM/SS teleoperation, not only enabling fine operation but also reducing operation error through collaborative decision making [
18,
19,
20].
Despite these advantages of MM/SS systems, human factors might introduce stability issues to the operation process. When faced with unstructured environments and unexpected accidents, human operators can be mentally stressed, leading to subjective cognition bias and flawed decisions. To solve this problem, we can introduce reinforcement learning (RL) to the human-in-the-loop system. RL is a popular approach for policy optimization that has seen various applications in the robotics domain [
17,
21,
22,
23]. Complex and accurate high-speed calculations are easy for agents, which can implement policy optimization under certain rule constraints. Most RL works focus on autonomous [
24,
25,
26,
27] and multiple-agent tasks [
28,
29,
30,
31] that do not exhibit human traits. Despite the promise of high-precision maneuvering by agents, human guidance is still needed for specific teleoperation tasks. It is difficult for robots to perceive unstructured environments accurately, which might result in unsafe behavior during the learning process [
32].
In addition, there is a lack of systems for training humans to adapt to cooperative patterns with agents. This poses a challenge to existing MM/SS teleoperation systems: how to train the agent which adapts to human operation and then design a training and cooperation system based on the trained agent. Although some RL works show agents can be trained by setting the reward function, they only focused on the unilateral training process and did not propose whether the the agent’s policy was based on rule constraints [
28,
29,
30,
33,
34]. The human–agent cooperative mechanism compared with human–human was not taken into account either. Moreover, some existing works modeled human actions as part of the RL environment [
26,
35,
36]. Nevertheless, humans are characterized by dynamic real-time interaction rather than the passive environment in terms of human-oriented teleoperation.
In this paper, a truncated quantile critics (TQC) RL-based training and collaboration integrated framework is proposed for human–agent teleoperation that encompasses assessment and agent-based arbitration. This framework describes the learning, training and cooperation relationships among experts, agents and novices based on different experience levels. Different from training agents, we focus on agent-to-human training and bilateral cooperation between a human and agent, in which the agent trains novices and trained novices work with the agent.
2. Methods
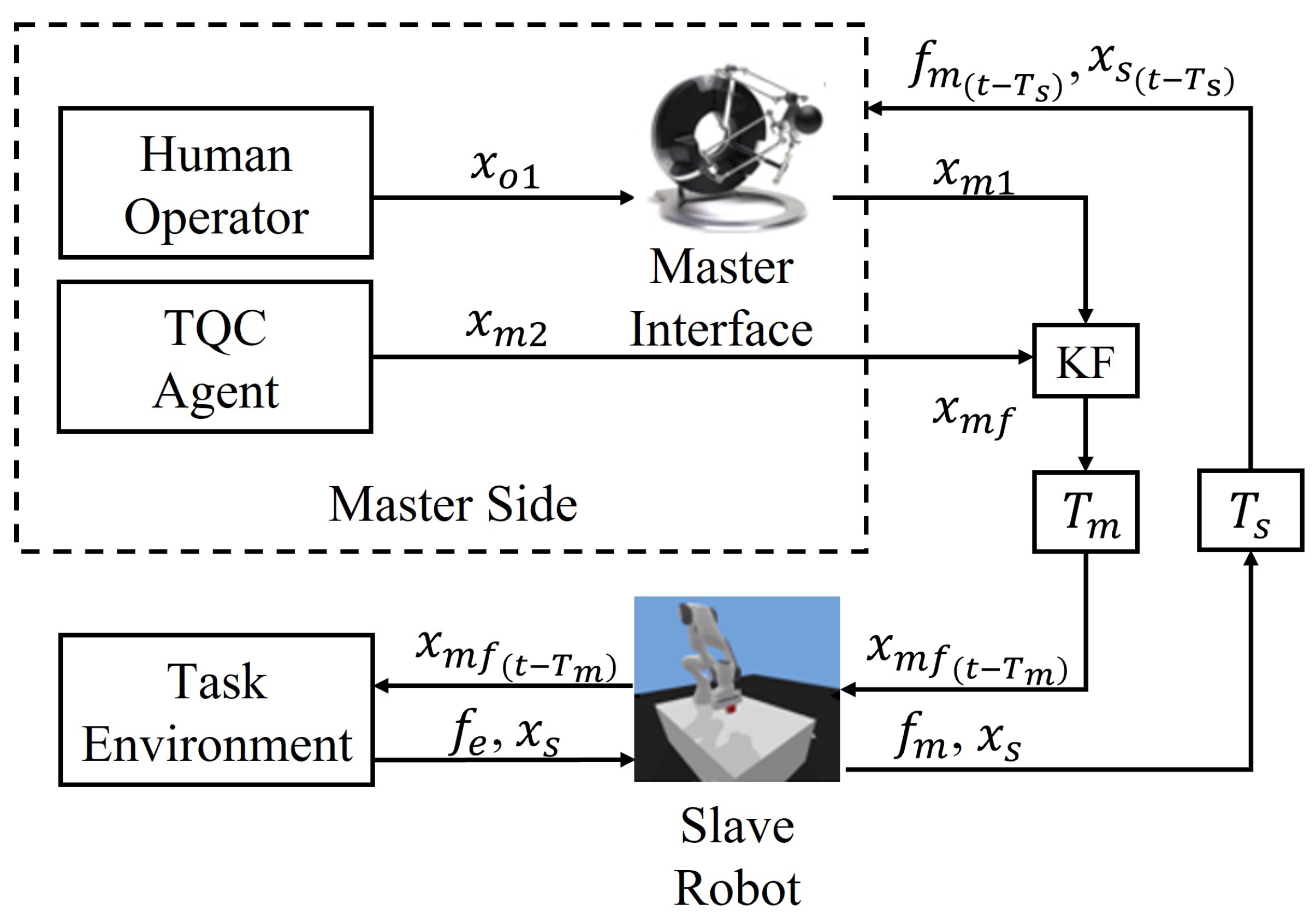
The proposed cooperation system is mainly composed of a master interface, TQC agent and the slave robot interacting with environments. The master commands from the operator and agent will be fused through a Kalman filter (KF) before being sent to the slave side, where
and
represent the commands defined in Cartesian space from the human operator and agent, respectively. The interactive force
will also feedback to the master side via a communication channel, which results in the latency
and
in the closed-loop system.
is the force mapped to the master interface. The arguments of the variables involved in the diagram are omitted for simplicity, as shown in
Figure 1. It is worth pointing out that the proposed framework also allows for human–human cooperation, which can be realized through replacing the agent with a human.
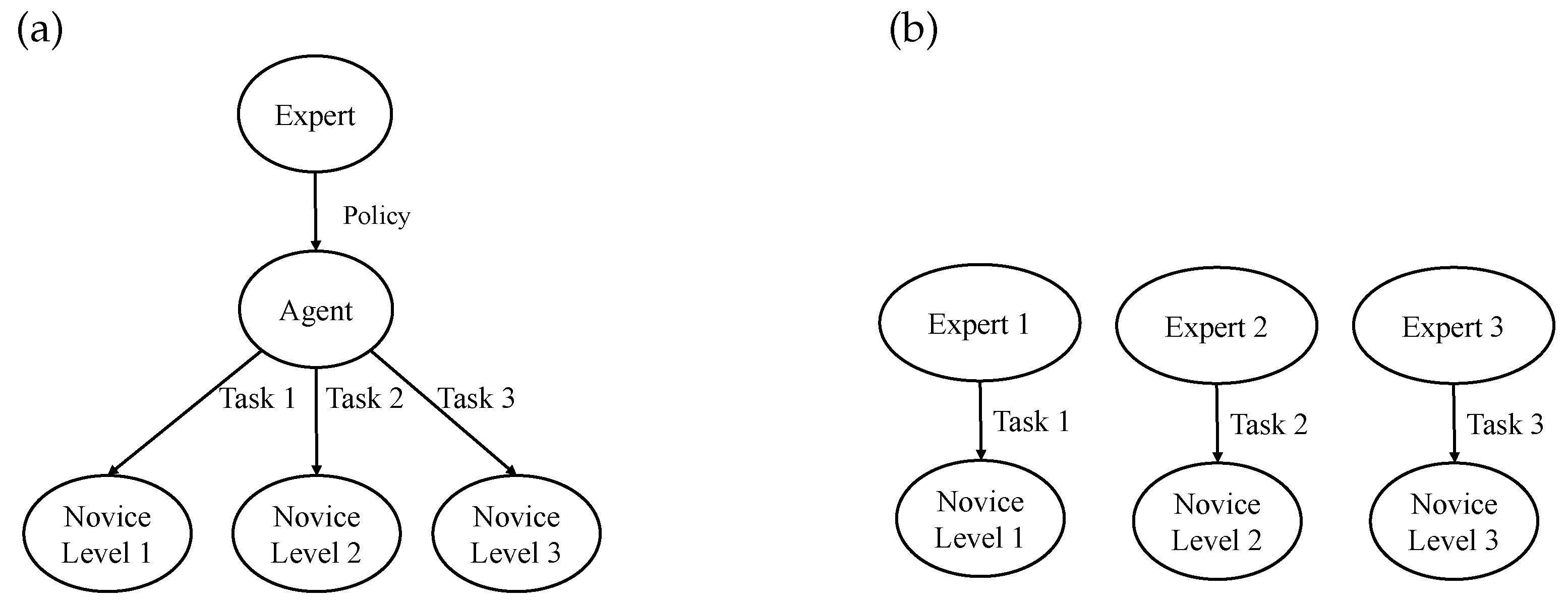
Before performing the human–agent cooperation, a critical issue is how to improve agent and operator skills to achieve a similar level of operation for both. Compared with the traditional one-to-one training mode [
37,
38] (see
Figure 2b), the agent-based training method [
39] is employed in this paper, which is able to provide one-to-many training for the novices at different levels, as demonstrated in
Figure 2a. The adopted agent can effectively implement the expert’s constraint rules to provide standardized actions and quantitative feedback. Moreover, the agent-based training approach significantly reduces the need for expert resources and enables simultaneous remote training of different novices.
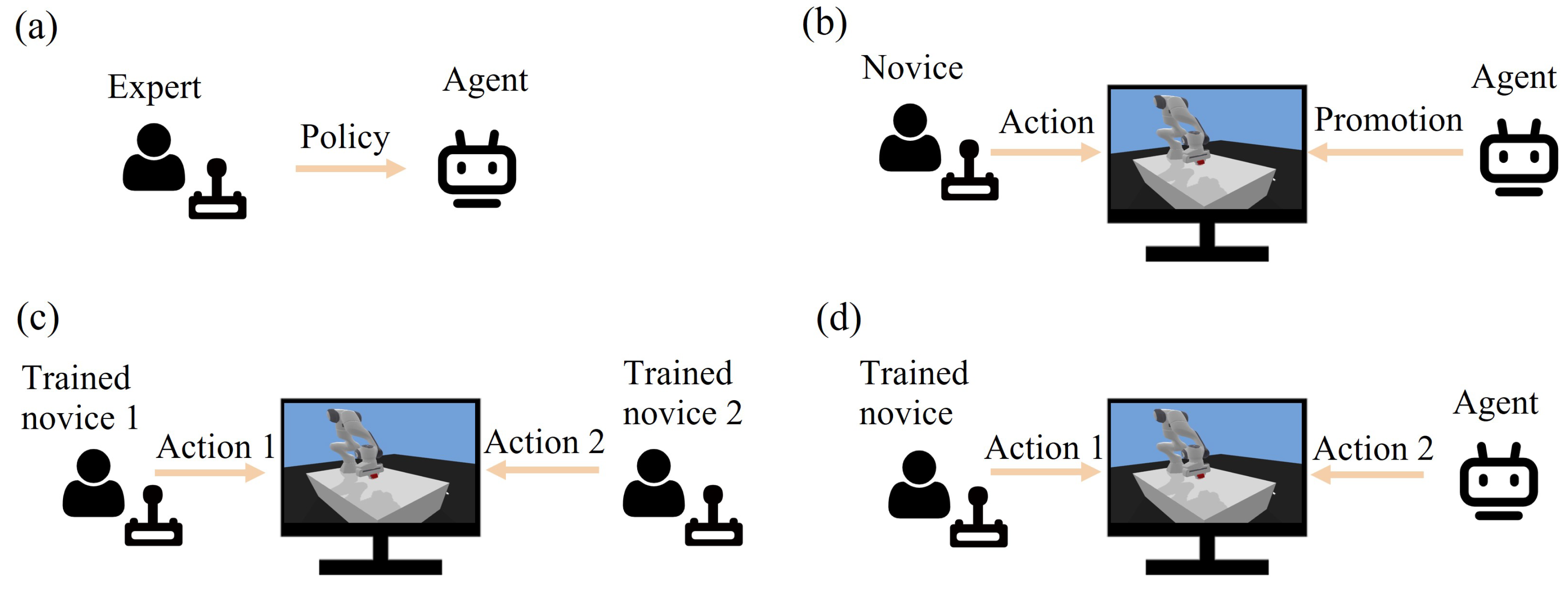
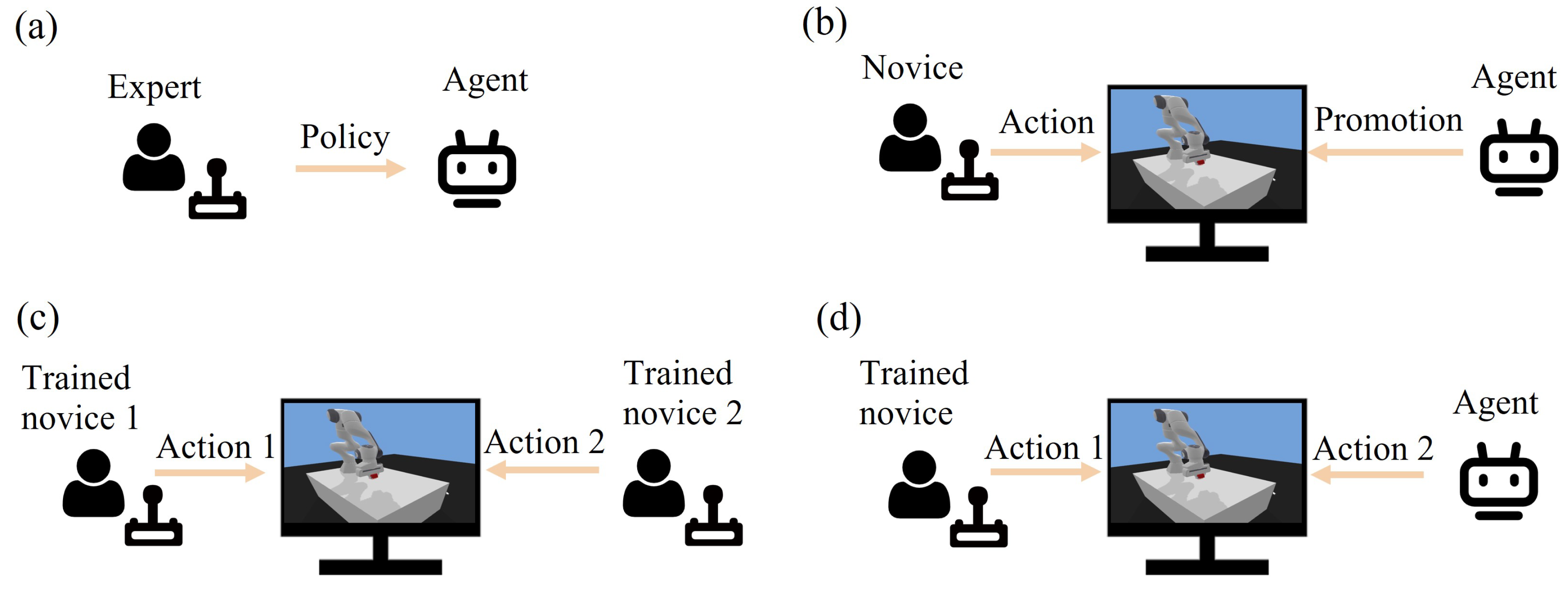
The overall training and collaboration procedure is depicted in
Figure 3. In order to render the training and cooperation framework, the first step is to formulate certain constraints through expert experience and train the agent with specific operational tasks through RL, as shown in
Figure 3a. Then, with the aid of the trained agent, a training and cooperation system will be accessible for novices (
Figure 3b). The developed system is beneficial for the training and cooperation of novices, including human–human (
Figure 3c) and human–agent (
Figure 3d) cooperation modes. The dominance factors of the agent and human will change dynamically based on their performance and task constraints. When the performance gap between operator and expert is large, the agent will play a relatively dominant role, guiding the novice user; as the performance gap narrows, the agent’s dominance will gradually shift to the user side.
2.1. Expert Trains Agent
Robotic manipulation tasks are characterized by high dimensions and continuous state space, including kinematic information on the robot and environment. When attempting to solve such problems, a dense reward function is difficult to define and use to guide the robot through the learning process, leading to a high time cost. To overcome this issue, we introduce hindsight experience replay (HER) [
40] and the TQC method to train the agent. In this way, the agent is trained through the reward function, speed and position constraints based on expert rules.
2.1.1. Hindsight Experience Replay
With the HER algorithm, the robot can learn from the high-dimension continuous state-action space, which facilitates increasing the reward density for the agent. Prior to completing the learning of a good strategy, the agent could complete the current RL for any state experienced in the sequence. If these states are regarded as task goals, the agent can obtain a large number of positive rewards, thereby promoting the learning process.
The HER algorithm additionally defines the task target space G under the basic RL framework, in which each target element corresponds to a reward mapping . At the beginning of each episode, by sampling the initial state in the distribution and the task goal, the task goal remains unchanged during the phase of interaction with the environment. In each timestep, the agent’s strategy input includes both the current state and current task goal, namely , and obtains an instant reward .
The input of the Q function includes state, action and goal, namely with being the discount factor. For the multi-goal RL task, assume that the target element g corresponds to a mapping , that is, the goal of the agent is to reach the state s by interacting with the environment, so as to satisfy . The target can also be specified to satisfy certain attributes in the state. For example, if the state is used to describe the two-dimensional coordinates of the horizontal plane, where the agent is currently located in . The task goal is to render the current state satisfying the given horizontal coordinates , then, there exists . In addition, we can define the target mapping description. For any given state s, there exists a mapping such that .
2.1.2. Truncated Quantile Critics
We train the agent with the TQC algorithm [
41] for two experimental applications, namely reaching and picking and placing (P&P) tasks. The state, action and reward for this experiment are defined as follows.
The actual state of the robot: angles and angular velocities of the robot joints, the poses of the objects and their linear and angular velocities.
The robot observation state: in the reaching task, the observation space contains the position and velocity of the end-effector. In the P&P task, the observation space contains the position and velocity of the end-effector and the objects’ pose.
The initial state and target distribution: in both tasks, the end-effector starts from a fixed position in each round. The robot end-effector is 20 cm above the surface. The initial position of the object is randomly sampled from the surface within a square. If the initial state already meets the task target, the initial state and target will be resampled.
Task goal: the target position g that the robot needs to move the object to within a certain error range . Thus, the goal is accomplished with and , where is the position of the target object, and the output is the Euclidean distance between the two inputs.
The reward function is defined as the negative bool value if the distance between the achieved and target positions is lower than the threshold.
2.2. Agent Trains Novice
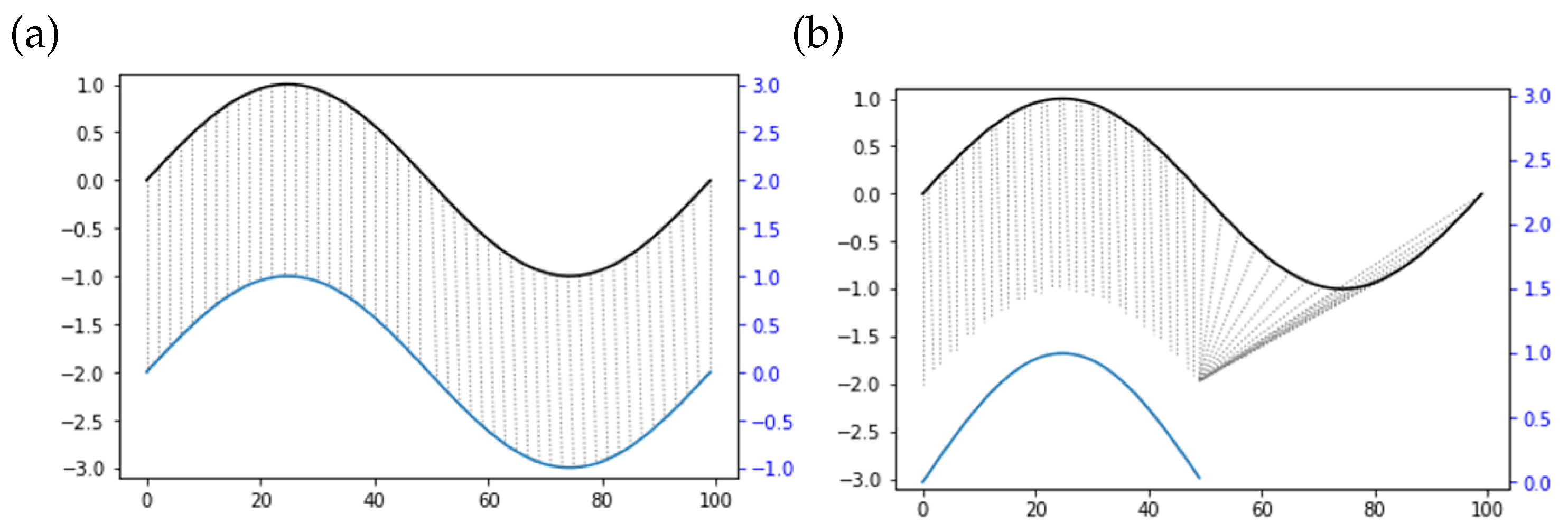
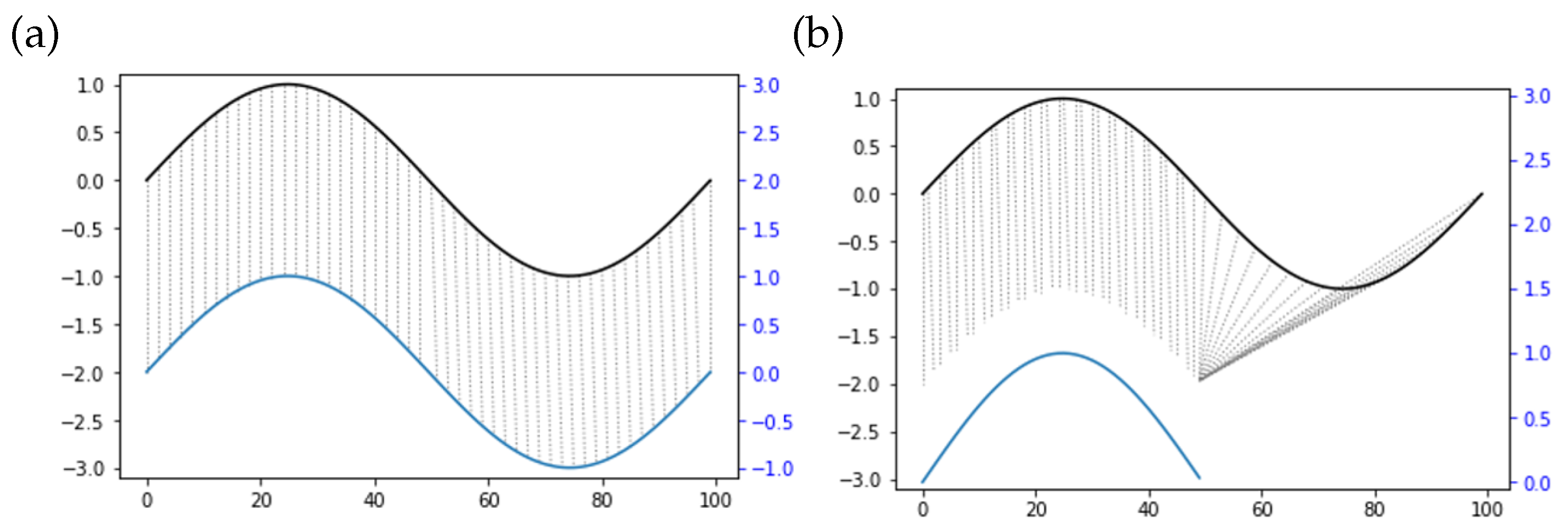
Similarity assessment is used to evaluate the training result of the operator. We check the similarity of operations from an expert agent and operator, and then train the operator through improving the similarity level. In teleoperation, similarity is reflected by the time delay and the operating speed difference when human operators conduct the same trajectory. Operators may behave at different speeds to perform the same trajectory. Apart from that, the displacement can only occur on the time axis in terms of different time series. With reverted displacement as an example, the two time series present the identity. Based on the above complicated cases, it is difficult to successfully measure the similarity between two time series with the application of point-to-point matching methods, such as Euclidean distance (
Figure 4a). The dynamic time warping (DTW) algorithm [
42] is therefore used to match time series with different lengths through prolonging and restricting the time series. In accordance with
Figure 4b, the top and bottom solid lines denote the two time series, and the dashed lines between them stand for the similar points. Since a discrete-time sequence characterizes the motion trajectory collected, the DTW algorithm can avoid unrecognizable problems due to different lengths. The similarity of two trajectories could be therefore calculated as follows.
Suppose the trajectory outputs by the agent and operator are
and
, namely
and
. We consider the warp path as
. The distance of the warp path follows the cost matrix
, whose element is described by
where
is the minimum distance of warp path
W, which is regarded as a metric to evaluate the similarity.
is the Euclidean distance between the two data points. The two trajectory sequences are therefore matched through the DTW algorithm. The smaller the
we calculate, the more similar the two trajectory sequences are.
2.3. Agent Cooperates with Human
The KF module is used to fuse the two commands (i.e.,
and
) and output the fused command
. A discrete control process can be described as
where
is the system state which contains position and velocity signals at the
kth sample.
H is the observation matrix.
A is the state-transition matrix.
is the observation state.
and
represent process and measurement noise, respectively. They are assumed to be white Gaussian noise, and their covariances are
Q and
R, respectively. Based on the previously collected data, a one-step state estimate can be deduced from the system process
where
is the state prediction and
the optimal result based on the previous state.
and
are the covariances of
and
, respectively. Based on the observed value at the
kth sample and the estimated value at the
th sample, we can obtain
where
is the Kalman gain,
and
is the error covariance matrix. With the block matrix
, we can derive from (
5) that
3. Experiment
We have conducted a series of experiments with ten healthy subjects (9 male, age 21 ± 3, 9 right-handed) without motor impairment. None of the subjects had experience with haptic devices. The experiment was approved by the Research Ethics Committee of Imperial College London (No. ICREC-18IC4816). Each subject was informed about the experiment and signed a consent form before the test.
3.1. Experimental Platform
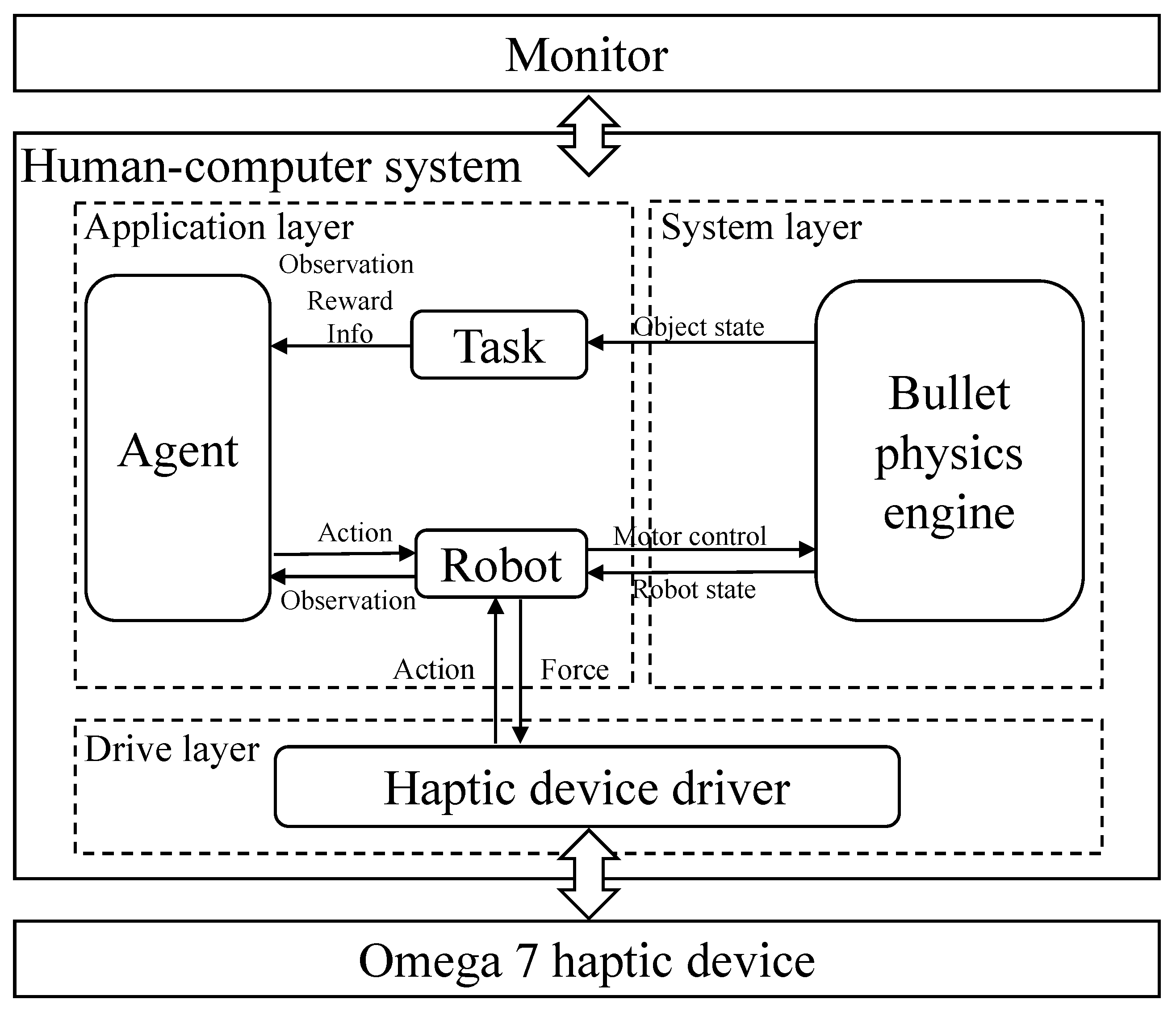
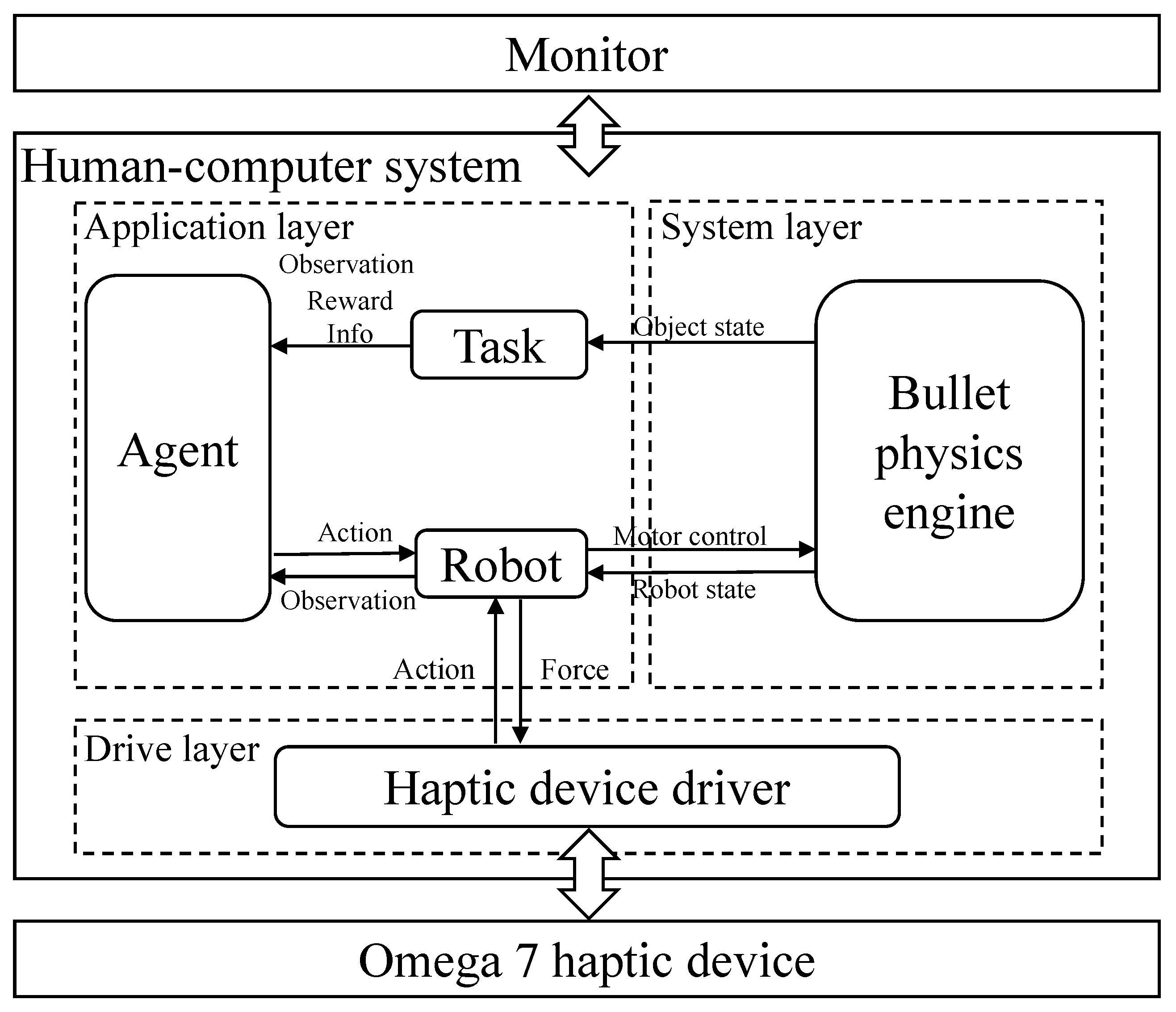
The experiment was conducted based on the simulation platform. The system architecture diagram is shown in
Figure 5, which consists of three main components: a human–computer simulation system, a visual display and a haptic interface. The haptic device (Omega.7, Force Dimension) was used to collect six degree-of-freedom (DoF) motion information and provide three-DoF force feedback in translations. The subject held the handle of the haptic device to remotely control the slave robot in Cartesian space. The human–computer system rendered the corresponding visual and haptic feedback information to the operator through a monitor and haptic device.
The software components of the system can be divided into driver layer, system layer and application layer. The driver layer processed haptic feedback information and drove the haptic device. In the system layer, the Bullet physics engine [
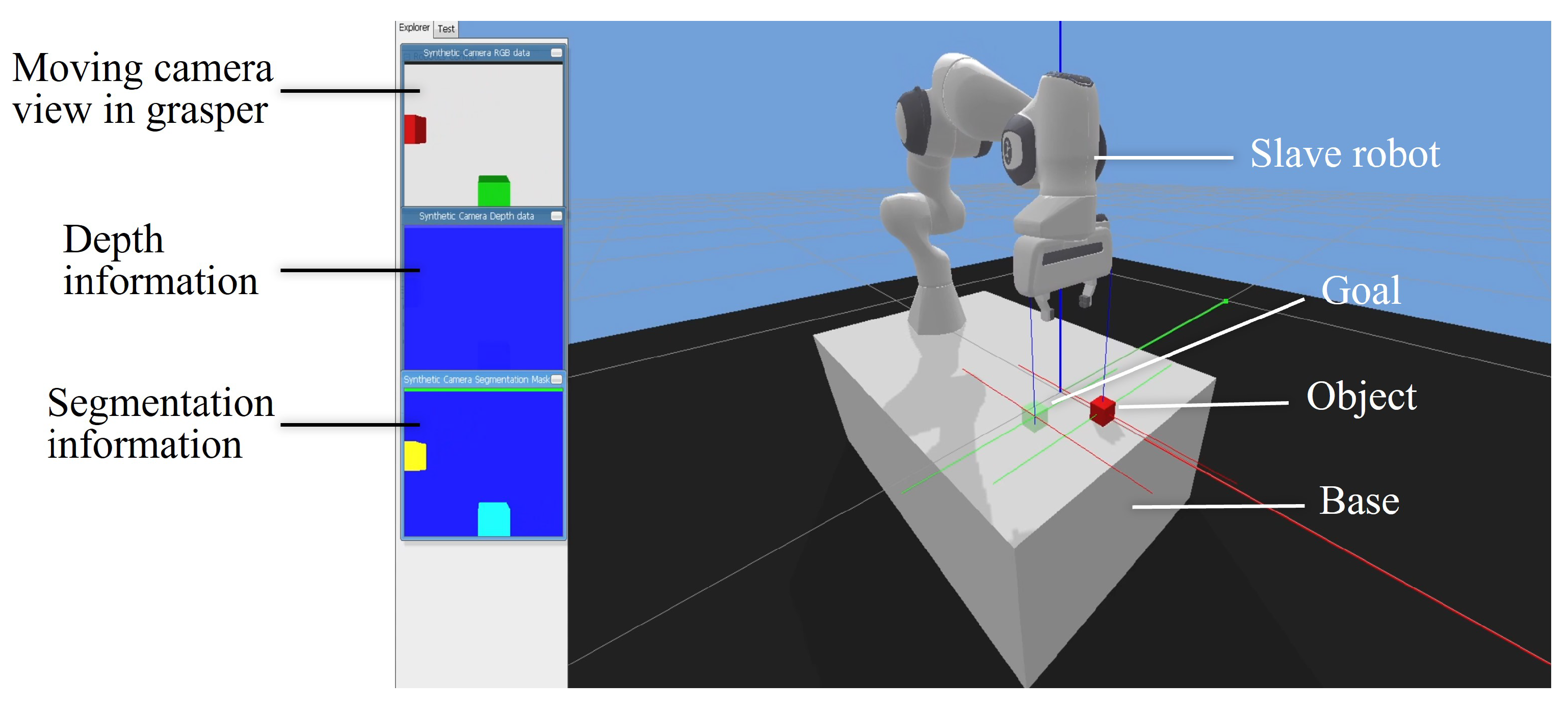
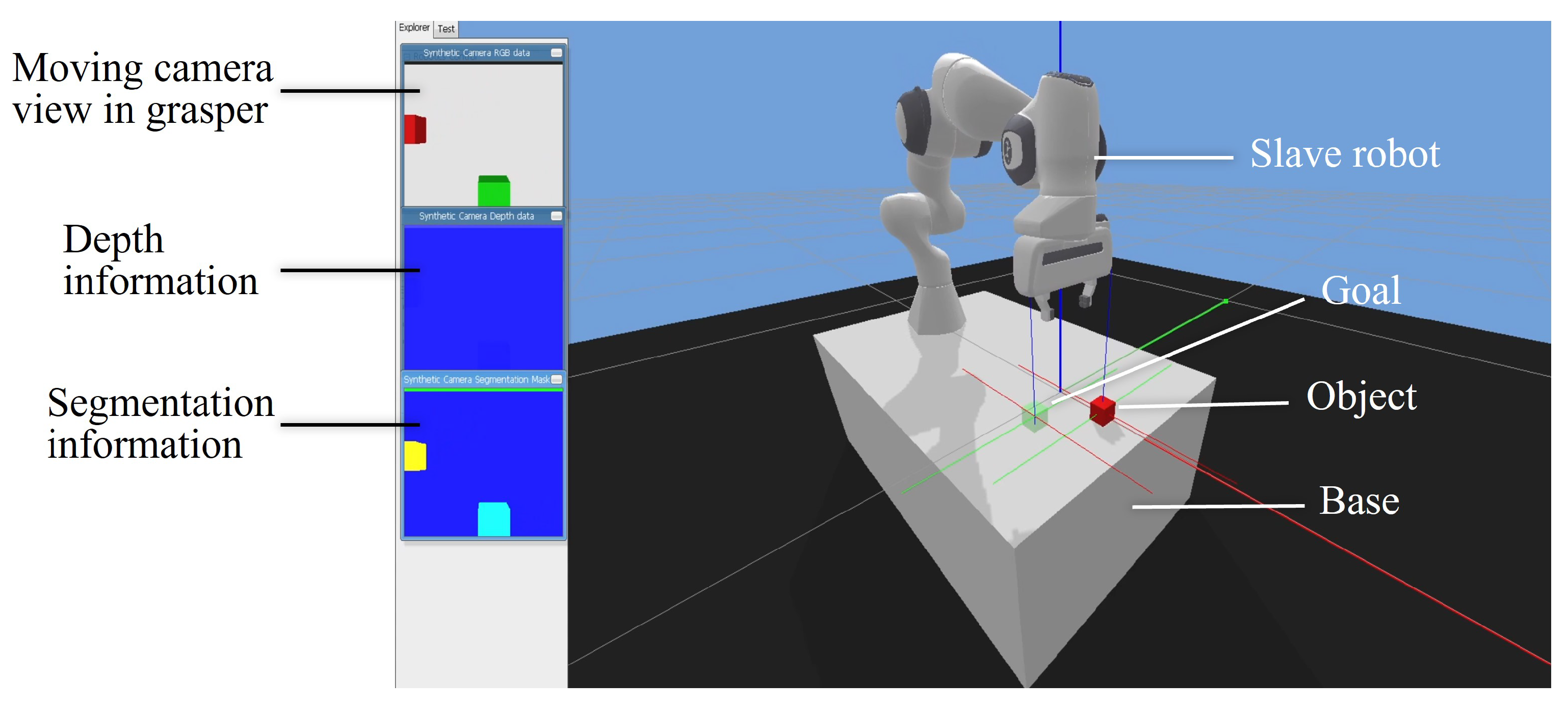
43] was employed to support Pybullet for the simulation. The application layer included modules of the agent, task and robot. The simulation platform used the Franka Panda robot (Franka Emika GmbH Inc., Munich, Germany) as the slave robot to interact with the environment. The visual display is shown in
Figure 6 and this graphic user interface (GUI) was designed based on Pybullet and Stable-Baselines3 [
44]. The main view for the operator was the slave robot under a global camera (
Figure 6, right panel). There were also three auxiliary windows on the left side of the GUI to provide user 3D information. The first view was extracted from the moving camera in the gripper of the robot, providing dynamic interaction information. The second window could provide depth information of the objects, and the third segmentation view could reflect the profiles of the objects.
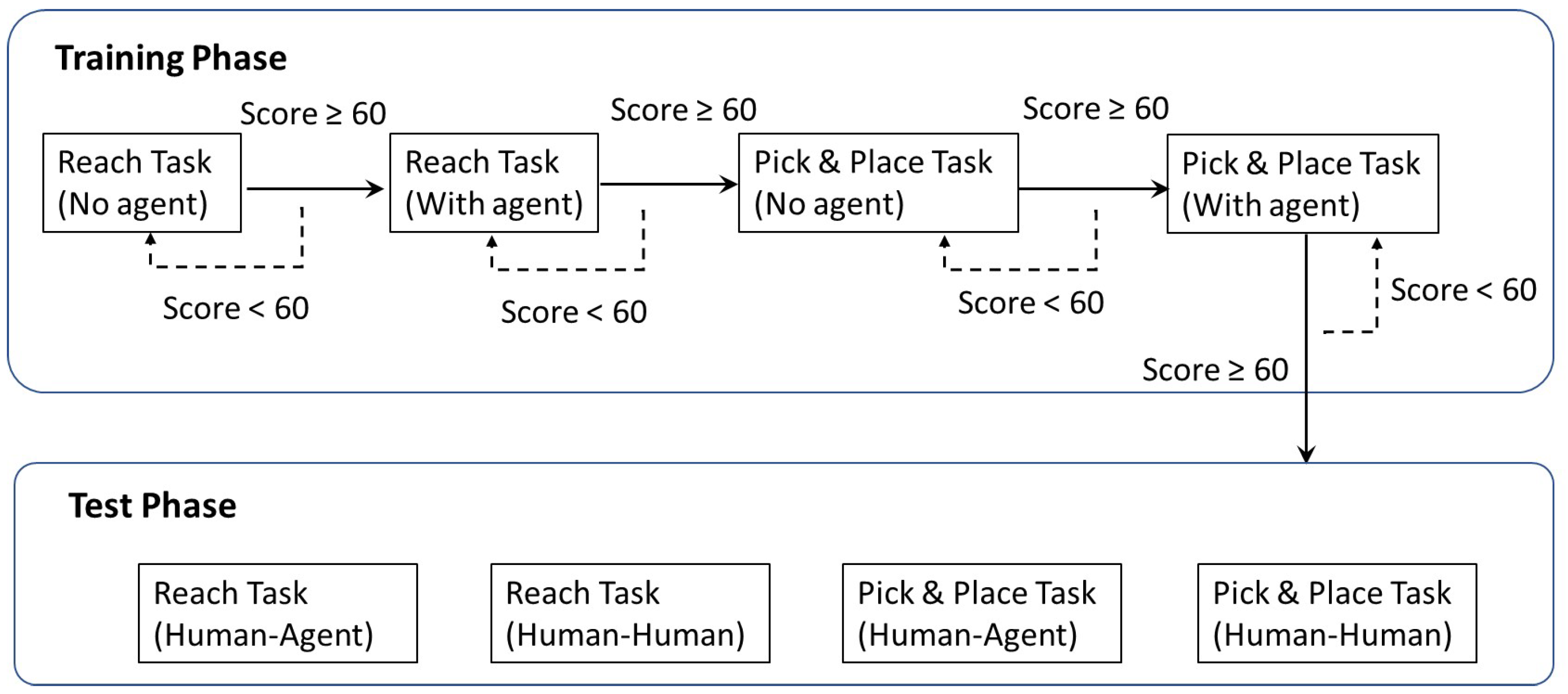
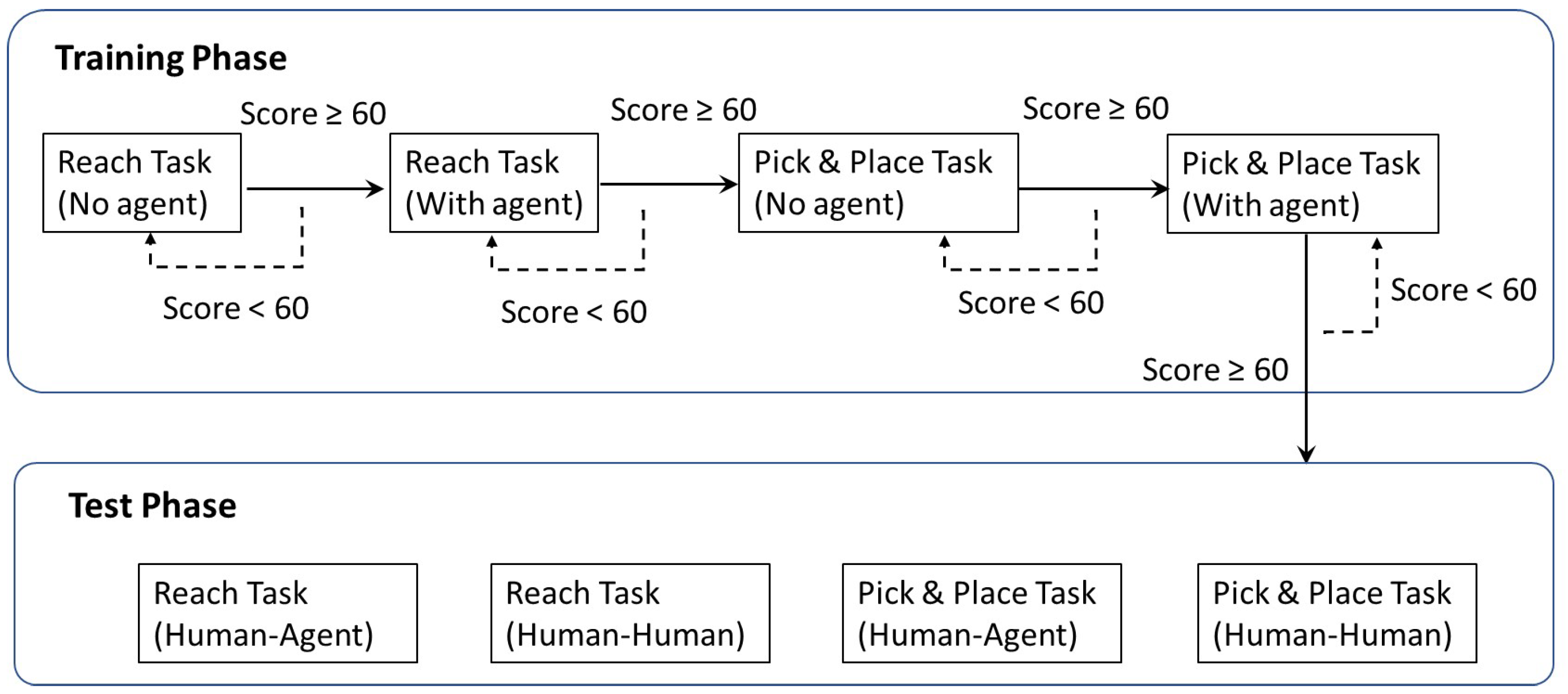
3.2. Experimental Procedure
The whole experiment included training and test phases (
Figure 7). The training session was designed to allow the subjects to become familiar with the teleoperation and reach the entry level of the task operation, where the agent would intermittently provide guidance trajectory for the novice in this phase. Then, in the test phase, we investigated human–human (HH) and human–agent (HA) cooperation to further check whether the agent could help the operator perform the task as a human operator. Finally, an assessment phase was conducted to collect the participants’ subjective responses to HH and HA cooperation modes.
3.2.1. Tasks
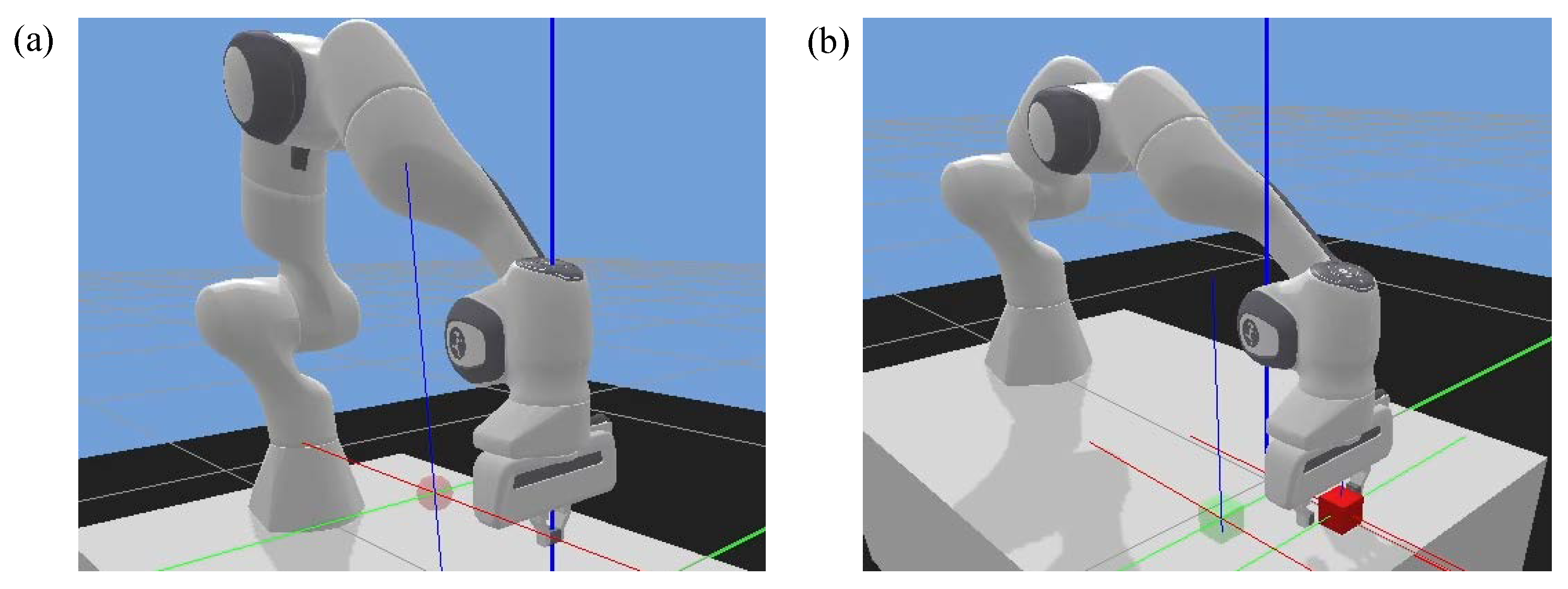
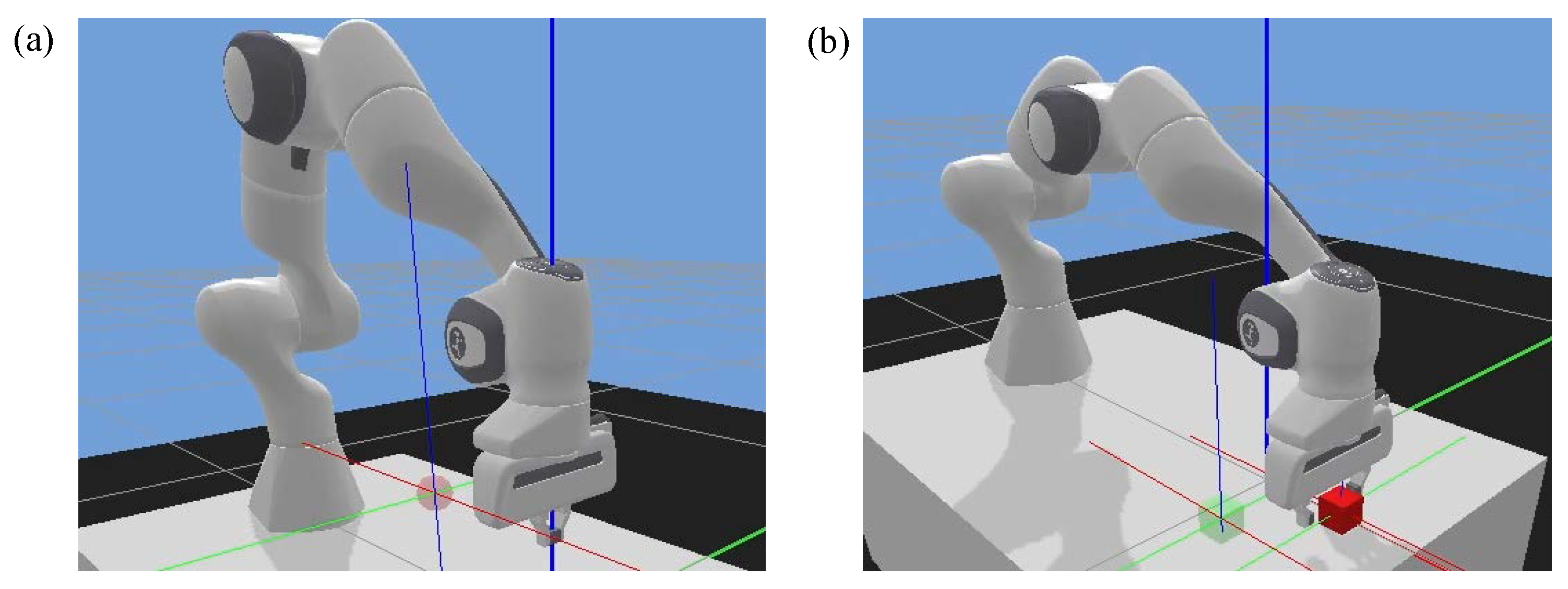
The reaching and P&P tasks were designed to reflect the common actions in teleoperation. The robot was set to move in a workspace of 30 × 30 × 20 cm. The targets were shown within the robot’s workspace.
Reaching task (
Figure 8a): this task was developed to test the subject’s motor control capability. The robot gripper remained closed in this task. A red target ball was randomly generated on the table. The subject was required to control the slave robot through the hand controller to reach the target as fast and accurately as possible. If the subject realized the goal within the update time (13 s), a new target would be shown.
P&P task (
Figure 8b): this task tested both the subject’s movement and grasping control abilities, which required a high level of coordination. In this task, a random red cube was generated on the table plane. The subject needed to control the robot end-effector to pick up the cube and place it in the target position (green transparent cube). The successful grasping should satisfy both position and force criteria, i.e., the gripper moves to the target and lifts it up using proper force. This grasping force was calculated by the physical engine of the robot controller through checking the deformation of the object surface. A new target would be shown if the goal was achieved or update time was reached. The update time for this task was 30 s.
3.2.2. Training Phase
In this phase, we provided the novices with visual cues and an operation score to learn the operation efficiently. For each task, there were two modes for training, namely without or with an agent. It should be noted that the agent in the training phase represents providing a guidance trajectory instead of involving control commands. At the end of each session, a performance score (0 to 100) was shown to the subject. It was derived from the similarity between the actual motion and guidance trajectory, where the latter represents the optimal operation in which an agent learned from an expert. If the subject’s performance score reaches 60, it is supposed that he/she has gained the control skills required for the test phase. Otherwise, the subject needs to continue a second training session for the corresponding mode. The criterion of the score and time limits was set based on trial and error using data of the reference value taken from the experimenters.
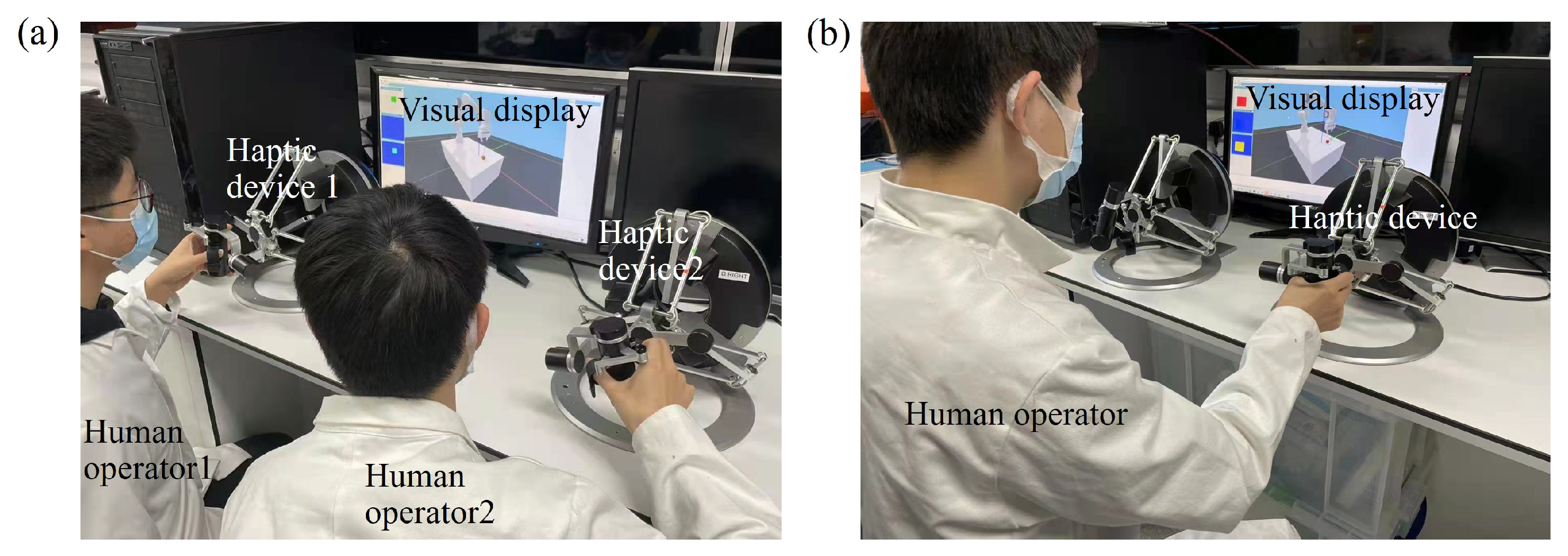
3.2.3. Test Phase
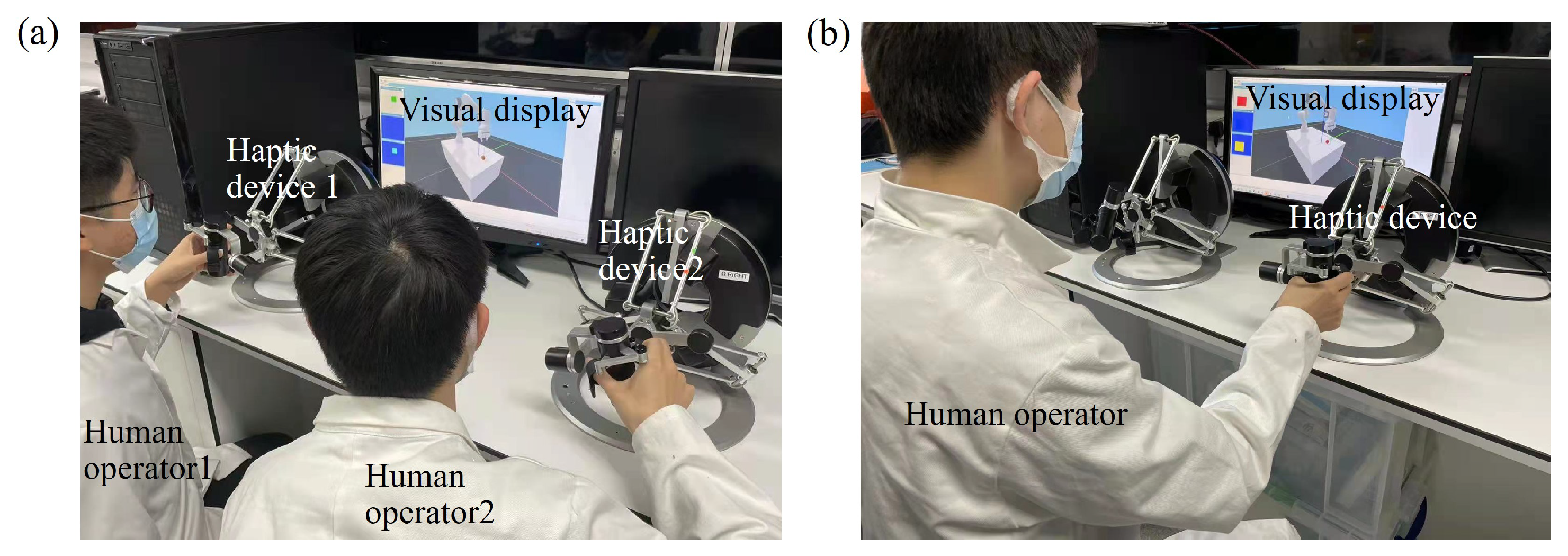
There was no guided trajectory shown on the screen in this phase. Subjects were involved in two different modes of cooperation, HH and HA cooperation tasks. The subjects were also told whether they would cooperate with a human or agent before each mode. In the HH cooperation mode, ten subjects were randomly paired into five groups to conduct the cooperation task. In the HA mode, one subject cooperated with the agent to perform the same task. At the end of the experiment, all subjects were subjectively assessed by questionnaires. Data such as operational time and task success rates were recorded for all trials. The experimental scene is shown in
Figure 9.
3.3. Evaluation Measures
The performance of the subjects was evaluated through both quantitative measures and subjective measures.
3.3.1. Quantitative Measures
Success rate: the success rate is the percentage of successfully completed trials to the total number of trials. The task is defined as successfully completed when the object is reached (i.e., the distance between robot end-effector and the center of the target cube is less than 0.05 m) within 13 s in the reaching task. In the P&P task, successful operations include reaching, grasping the object and moving it to the target position within 30 s. Except satisfying the position criterion, the grasping forces of the gripper should be large enough to lift the object.
Operation time: the operation time is the time from the display of the target to the successful arrival or placement. In the failed trial, the operation time is the update time.
3.3.2. Subjective Measures
The subjects were invited to fill in the questionnaire after test phases (
Table 1), where Q1 describes the comparison with human operation without the assistance of an agent or other subject. The questionnaire was designed to evaluate their subjective responses in mental effort, temporal demand, agency, performance, task difficulty and robot/human assistance. All questionnaire items were constructed using a 5-point Likert scale.
4. Results
In this section, we will show the experimental results of test phase in both performance metrics and questionnaire responses. A Shapiro–Wilk test was conducted to examine the data distribution. Both quantitative and subjective measurements were not normally distributed. Thus, we used non-parametric Wilcoxon signed rank test to check the differences of human–human and human–agent control modes.
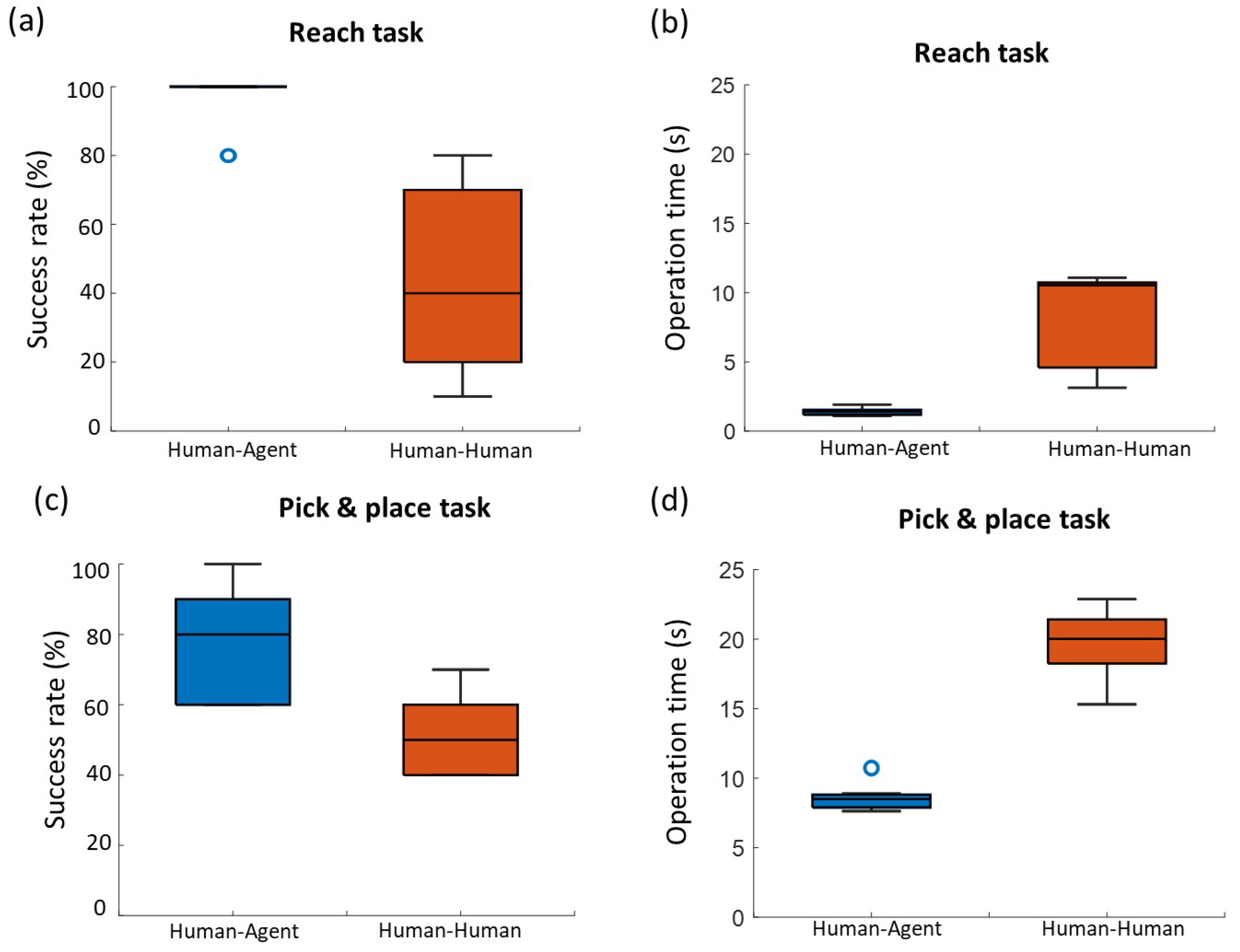
4.1. Performance Measures
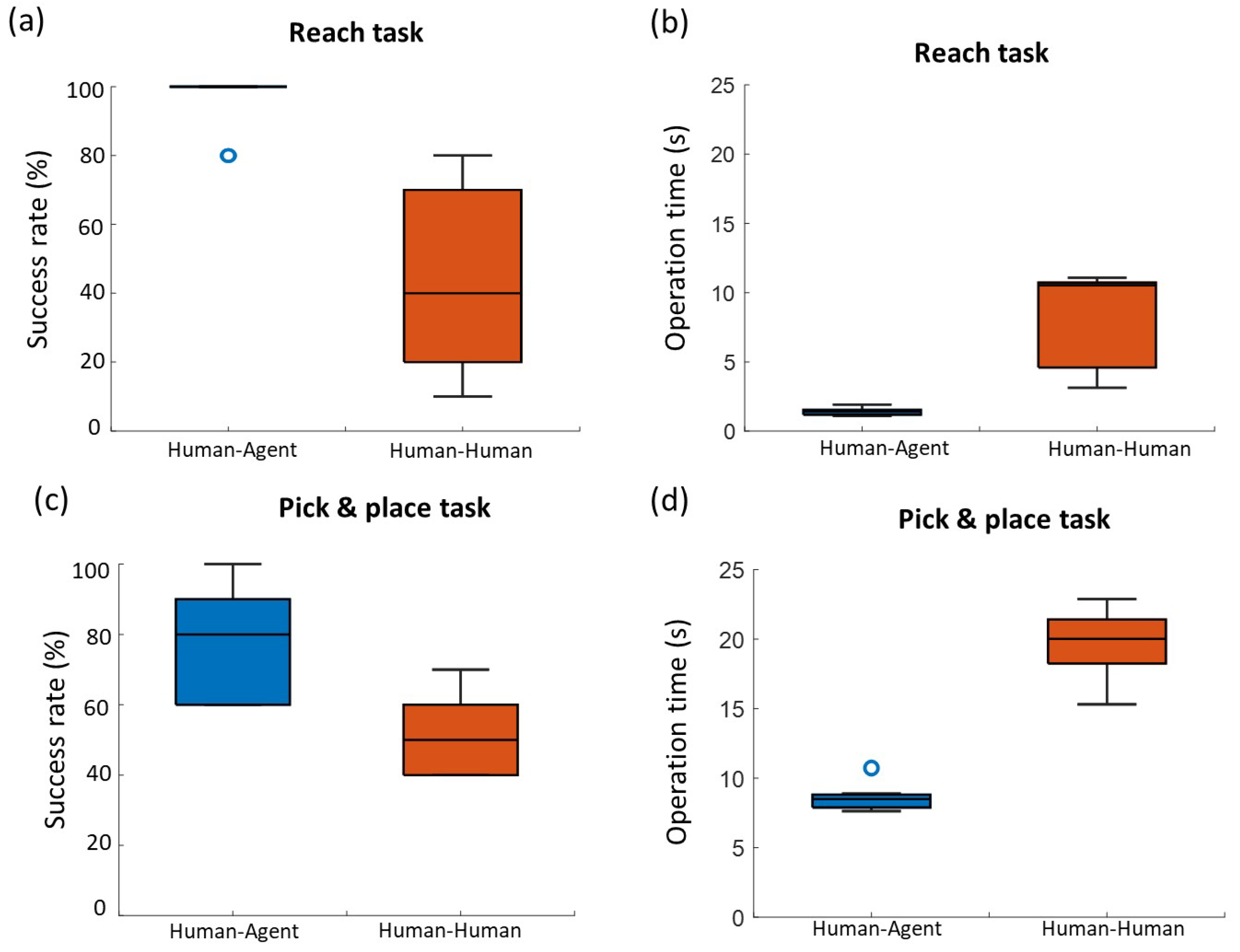
Figure 10a shows the result of the success rate for the reaching task. The average success rate of human–human cooperation mode was 44.0% with 27.2% deviation. In contrast, the average success rate of human–human cooperation mode arrived at 96.0% with lower deviation of 8.4%. The addition of robotic agent significantly improves the success rate compared with a human partner (
p = 0.007). Similarly, the assistance of an agent is also reflected in the operation time. The subjects took 8.0 ± 3.5 s in average to complete the task in human–human cooperation, while human–agent saved more than 80% of the time than human–human mode, thereby significantly improving the operation efficiency (
p = 0.005). The agent played an important role in human–agent cooperation with average weights from 0.74 to 0.95.
Compared to the reaching task, the P&P task required relatively more time to be performed (see
Figure 10d). The average success rate for human–agent cooperation in the P&P task was about 77.0% lower than that in the reaching task. On the other hand, the success rate for human–human cooperation in the P&P task was not affected by the task complexity and even a little higher than that in the reaching task. This result suggests that the current assistance strategies of the robotic agent are more suitable for simple motion tasks. However, the advantages of human–agent cooperation in both metrics were still obvious compared with the human–human cooperation (
Figure 10c,d). The average operation time for human–human cooperation was 19.5 ± 2.8 s, while the human and agent spent about 8.6 ± 0.9 s (
p = 0.005). The success rate of the human–agent mode was significantly higher than human–human mode (
p = 0.007). In the process of the P&P task, the average weights for agent in human–agent cooperation were within the range of
.
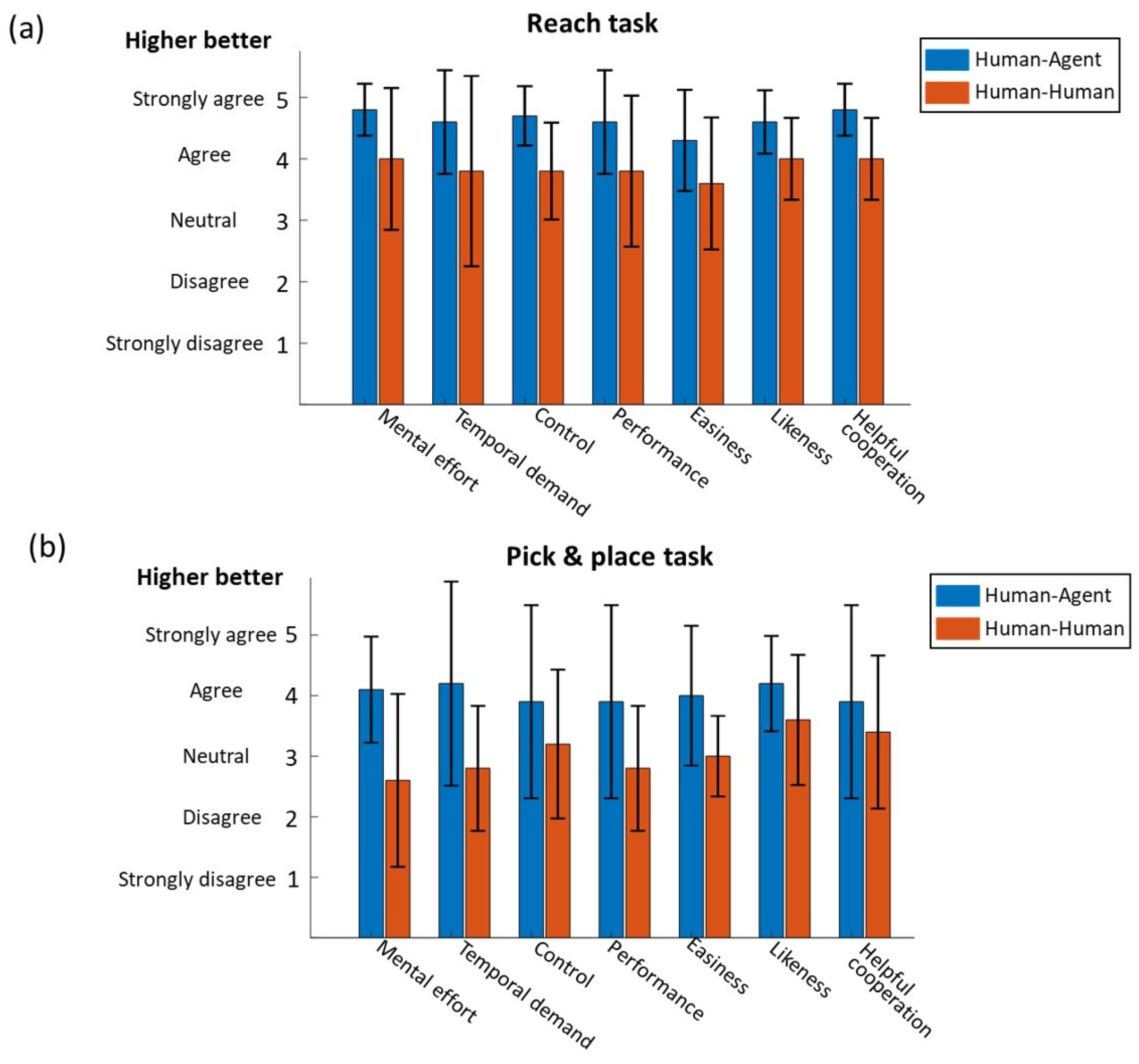
4.2. Subjective Assessment
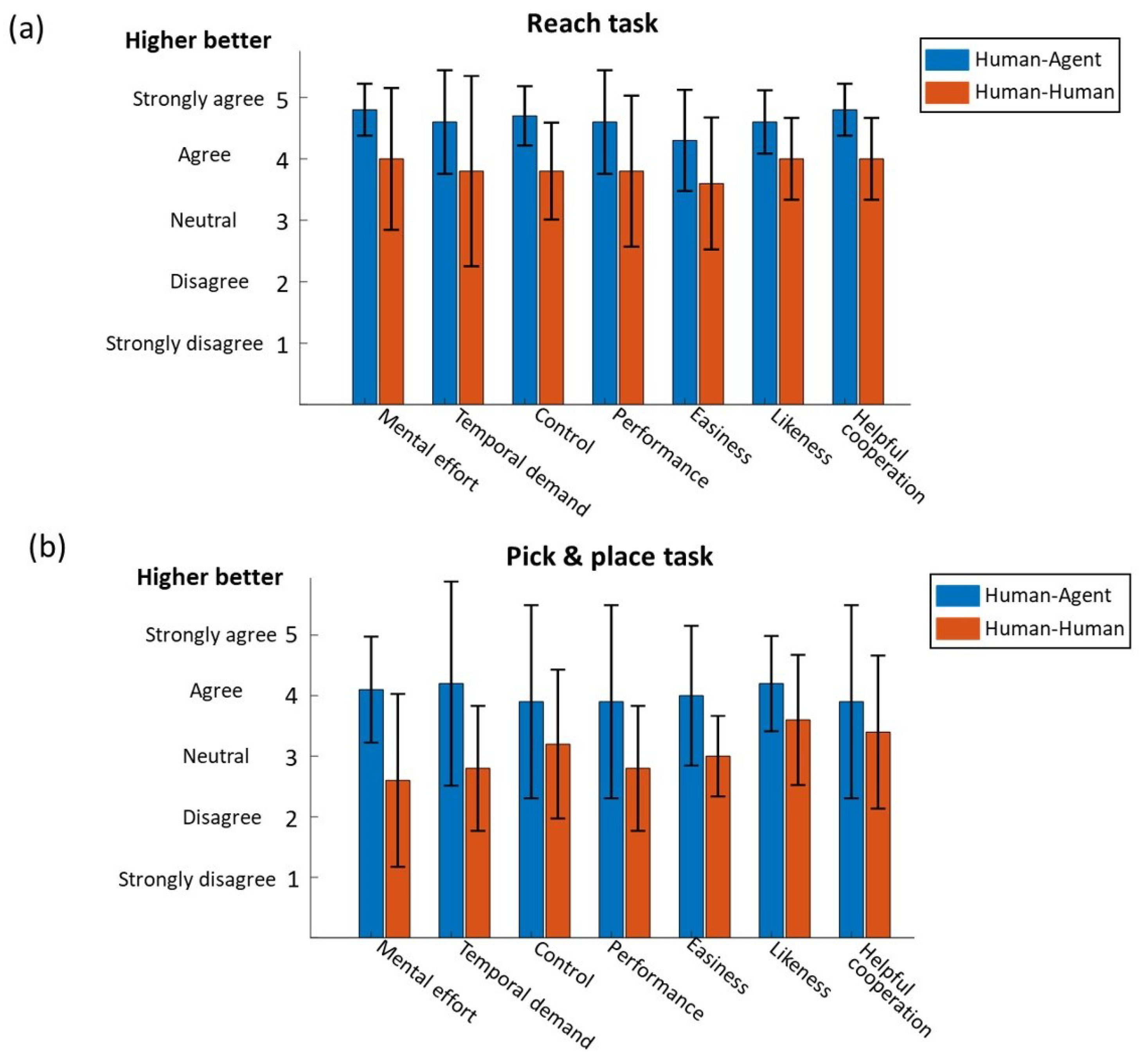
The questionnaire result for the reaching task is shown in
Figure 11a. In general, the subjects’ responses were positive on the reaching task. The average response ranges for human–human and human–agent cooperation were
and
, respectively, which were both above the neutral score. The subjects felt that cooperating with the agent required less mental effort compared to that with a human partner with a marginally significant difference (
p = 0.05). This might be due to the fact that the agent could provide efficient and consistent assistance to the operator and the subject could trust the agent and follow its guidance. Then, it is reasonable that operating with an agent was easier in terms of the subjects’ feelings (
p = 0.02). In addition, the subjects believed they were able to control the robot with the agent better (
p = 0.02). This indicates that although the agent may contribute more to the task completion, the operator still had the autonomy with even stronger feelings of control. However, cooperating with the agent and human partner did not cause different feelings on temporal demand and performance (
p = 0.08, 0.1, respectively). However, from subjective perspectives, the subjects preferred cooperating with an agent than a human partner (
p = 0.01), and they believed the robotic agent was more helpful to perform the task than cooperating with a human partner (
p = 0.02).
The subjective responses for the P&P task are shown in
Figure 11b. As the P&P task consists not only of reaching, but also grasping, moving and loading, it is obvious that the subjective scores of the P&P task (
Figure 11b) were lower than those of the reaching task (
Figure 11a) in all metrics. The average responses were from 2.6 to 3.6 for human–human mode and 3.9 to 4.2 for human–agent mode. Similar to the reaching task, the subjects felt human–agent cooperation was easier than human–human (
p = 0.008) in the P&P task. Although the subjects felt the task was easier with an agent, they were uncertain whether the agent partner or human partner helped them more. There is no significant difference in assistance from the human and agent partner (
p = 0.3). Furthermore, subjects felt their performance was better when cooperating with an agent (3.9 ± 1.6) but there was no significant difference between the human or agent partner (
p = 0.06). In addition, different from the responses in the reaching task, subjects did not feel an obvious difference in control (
p = 0.08) or preference (
p = 0.1) when cooperating with an agent or human. However, it is worth noting that human–agent cooperation required significantly less mental effort (
p = 0.02) and temporal demand (
p = 0.03) than human–human cooperation in the P&P task.
5. Discussion
The experimental results have validated the proposed cooperative framework for multi-master/single-slave teleoperation and proved that human–agent cooperation is superior to human–human cooperation. With the help of a Kalman filter, the human and agent commands can be balanced and fused by time-varying weights. Compared with the previous telerobotic schemes [
8,
9], the introduced TQC agent extends the traditional single-master/single-slave teleoperation paradigm to overcome subjective operation errors, which enables the collaborative agent to assist on the master side. Instead of correcting the master command by introducing a co-pilot on the slave side [
17], the master commands are blended on the master side, which overcomes the uncertainty caused by the co-pilot and reduces the computational burden for the slave side.
In general, it is found that cooperating with an agent could reduce the subjects’ mental effort and make the task operation easier compared to cooperating with a human partner in both the reaching and P&P task. Compared to a human partner, the proposed agent plays a fixed role as an assistant, where the degree of assistance is determined dynamically by the subject’s operation performance. In contrast, a human partner is unpredictable, so a lack of understanding of each other’s proficiency would result in complicated interactive behaviors between a human and human, including cooperation, collaboration and competition [
45]. The human–human interactive behaviors could switch among these three taxonomies, so it is difficult to achieve the interaction tasks in the absence of informative communication. In addition, the subjects felt the agent was more helpful and they had better control than with a human partner in the reaching task. Since the P&P task consists of multiple sub-processes (i.e., reaching, grasping, moving and loading), more conflicted behaviors might be triggered. As a result, the subjective assessment gap in performing the P&P task is more pronounced than that in the reaching task.
In the experiment, the agent played a relatively dominant role in both tasks with the average dynamic weights greater than 0.647. On the one hand, this result indicates that the designed agent could effectively assist a human operator to reduce their workload and mental load. On the other hand, the human operator trusted the cooperated agent and was inclined to cede some of the autonomy to the agent in terms of tasks. The agent in the reaching task tended to be assigned more weights than in the complex P&P task, due to the fact that subjects were possibly more confident in the agent performing simple movements. Regarding the P&P task, the agent partner was still superior to the human partner but its assistance to the operator was affected by the complexity of the task. Correspondingly, the operator was determined to take back some control and assign relatively less weight to the agent. However, it should be noticed that, in the current experiment setting, the novice operators were trained in a relatively short time and their capability may still be at the entry level, which explained the high weights in both tasks from another point of view.
6. Conclusions
The teleoperation control framework for human–agent collaboration is investigated in this paper. A reinforcement learning algorithm and Kalman filter in the proposed cooperative framework allowed for novice training and human–agent collaboration simultaneously. The TQC agent is beneficial to improve the training compared with traditional one-expert-to-one-novice training mode. The experimental results have quantitatively shown that the proposed framework can improve the success rate and operation time for the reaching task and P&P task with the collaboration of the designed agent. The questionnaire result also sheds light on the fact that the collaborating agent partner facilitates reducing human mental loads.
Although the proposed human–agent partnership effectively improves the operation efficiency and reduces human mental efforts, there are some aspects we could further improve in the proposed framework. Firstly, the assistance role of the agent is initially assumed to be fixed. However, a flexible role of the agent is more practical for physical human–robot interaction. We will integrate the human intent prediction into the system which enables real-time estimation of the operator’s state and adjusts the role of the assistant agent accordingly. Secondly, the proposed agent is suitable for simple reaching tasks but less adaptive to complicated P&P tasks. Our future research will investigate how a human transfers the authority to his/her partner in more complicated interaction tasks. Based on this, we will develop more natural, supportive and task-specific agent for a human operator or autonomous agent–agent control to perform multiple operation activities.
Author Contributions
Conceptualization, Z.H. and Z.W.; methodology, Z.W. and B.X.; software, Z.H. and W.B.; validation, Z.H.; formal analysis, Y.H. and L.S.; investigation, B.X. and L.S.; resources, W.B. and E.M.Y.; data curation, Z.H. and Y.H.; writing—original draft preparation, Z.H. and Z.W.; writing—review and editing, Z.W., Y.H., L.S., B.X. and E.M.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Engineering and Physical Sciences Research Council (EPSRC) Grant EP/P012779/1; European Commission Grants H2020 PH-CODING (FETOPEN 829186), CONBOTS (ICT 871803), REHYB (ICT 871767), NIMA (FETOPEN 899626) and UK EPSRC Grant FAIR-SPACE EP/R026092/1.
Institutional Review Board Statement
The study was approved by the Ethics Committee of Imperial College London (protocol code: ICREC-18IC4816).
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
The data presented in this study are available on request from the corresponding author. The data are not publicly available due to privacy and ethical.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
Abbreviations
The following abbreviations are used in this manuscript:
| KF | Kalman Filter |
| TQC | Truncated Quantile Critics |
| RL | Reinforcement Learning |
| P & P | Pick and Place |
| HER | Hindsight Experience Replay |
| HH | Human–Human |
| HA | Human–Agent |
References
- Chen, Z.; Wang, Z.; Liang, R.; Liang, B.; Zhang, T. Virtual-joint based motion similarity criteria for human-robot kinematics mapping. Robot. Auton. Syst. 2020, 125, 103412. [Google Scholar] [CrossRef]
- Gao, A.; Murphy, R.R.; Chen, W.; Dagnino, G.; Fischer, P.; Gutierrez, M.G.; Kundrat, D.; Nelson, B.J.; Shamsudhin, N.; Su, H.; et al. Progress in robotics for combating infectious diseases. Sci. Robot. 2021, 6. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Liang, B.; Sun, Y.; Zhang, T. Adaptive Fault-Tolerant Prescribed-Time Control for Teleoperation Systems with Position Error Constraints. IEEE Trans. Ind. Informatics 2020, 16, 4889–4899. [Google Scholar] [CrossRef]
- Boukhnifer, M.; Ferreira, A. Fault tolerant control of a bilateral teleoperated micromanipulation system. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 412–417. [Google Scholar]
- Zheng, L.; Yi, R. Fault diagnosis system for the inspection robot in power transmission lines maintenance. In Proceedings of the 2009 International Conference on Optical Instruments and Technology: Optoelectronic Imaging and Process Technology, International Society for Optics and Photonics, Shanghai, China, 19–22 October 2009. [Google Scholar]
- Kettwich, C.; Schrank, A.; Oehl, M. Teleoperation of Highly Automated Vehicles in Public Transport: User-Centered Design of a Human-Machine Interface for Remote-Operation and Its Expert Usability Evaluation. Multimodal Technol. Interact. 2021, 5, 26. [Google Scholar] [CrossRef]
- Schmaus, P.; Leidner, D.; Krüger, T.; Bayer, R.; Pleintinger, B.; Schiele, A.; Lii, N.Y. Knowledge Driven Orbit-to-Ground Teleoperation of a Robot Coworker. IEEE Robot. Autom. Lett. 2020, 5, 143–150. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Chen, Z.; Liang, B. Fixed-time velocity reconstruction scheme for space teleoperation systems: Exp Barrier Lyapunov Function approach. Acta Astronaut. 2019, 157, 92–101. [Google Scholar] [CrossRef]
- Wang, Z.; Lam, H.; Xiao, B.; Chen, Z.; Liang, B.; Zhang, T. Event-Triggered Prescribed-Time Fuzzy Control for Space Teleoperation Systems Subject to Multiple Constraints and Uncertainties. IEEE Trans. Fuzzy Syst. 2021, 29, 2785–2797. [Google Scholar] [CrossRef]
- El Rassi, I.; El Rassi, J.M. A review of haptic feedback in tele-operated robotic surgery. J. Med Eng. Technol. 2020, 44, 247–254. [Google Scholar] [CrossRef]
- Okamura, A. Methods for haptic feedback in teleoperated robot-assisted surgery. Ind. Robot. Int. J. 2004, 31, 499–508. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Lai, W.; Cao, L.; Burdet, E.; Phee, S.J. Design and Evaluation of a Foot-Controlled Robotic System for Endoscopic Surgery. IEEE Robot. Autom. Lett. 2021, 6, 2469–2476. [Google Scholar] [CrossRef]
- Huang, Y.; Lai, W.; Cao, L.; Liu, J.; Li, X.; Burdet, E.; Phee, S.J. A Three-Limb Teleoperated Robotic System with Foot Control for Flexible Endoscopic Surgery. Ann. Biomed. Eng. 2021, 49, 2282–2296. [Google Scholar] [CrossRef] [PubMed]
- Saltaren, R.; Aracil, R.; Alvarez, C.; Yime, E.; Sabater, J.M. Field and service applications—Exploring deep sea by teleoperated robot—An Underwater Parallel Robot with High Navigation Capabilities. IEEE Robot. Autom. Mag. 2007, 14, 65–75. [Google Scholar] [CrossRef]
- Sun, Y.; Chen, X.; Wang, Z.; Qin, H.; Jing, R. Adaptive interval type-2 fuzzy control for multi-legged underwater robot with input saturation and full-state constraints. Int. J. Syst. Sci. 2021, 1–16. [Google Scholar] [CrossRef]
- Shahbazi, M.; Atashzar, S.F.; Patel, R.V. A Systematic Review of Multilateral Teleoperation Systems. IEEE Trans. Haptics 2018, 11, 338–356. [Google Scholar] [CrossRef]
- Wang, Z.; Bai, W.; Chen, Z.; Xiao, B.; Liang, B.; Yeatman, E. Multiple-Pilot Collaboration for Advanced RemoteIntervention using Reinforcement Learning. In Proceedings of the 2021 47th Annual Conference of the IEEE Industrial Electronics Society (IECON), Toronto, ON, Canada, 13–16 October 2021. [Google Scholar] [CrossRef]
- Munawar, A.; Wu, J.Y.; Taylor, R.H.; Kazanzides, P.; Fischer, G.S. A Framework for Customizable Multi-User Teleoperated Control. IEEE Robot. Autom. Lett. 2021, 6, 3256–3263. [Google Scholar] [CrossRef]
- Benloucif, A.; Nguyen, A.T.; Sentouh, C.; Popieul, J.C. Cooperative Trajectory Planning for Haptic Shared Control Between Driver and Automation in Highway Driving. IEEE Trans. Ind. Electron. 2019, 66, 9846–9857. [Google Scholar] [CrossRef]
- Sentouh, C.; Nguyen, A.T.; Benloucif, M.A.; Popieul, J.C. Driver-Automation Cooperation Oriented Approach for Shared Control of Lane Keeping Assist Systems. IEEE Trans. Control. Syst. Technol. 2019, 27, 1962–1978. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Nguyen, N.D.; Nahavandi, S. Deep Reinforcement Learning for Multiagent Systems: A Review of Challenges, Solutions, and Applications. IEEE Trans. Cybern. 2020, 50, 3826–3839. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bhagat, S.; Banerjee, H.; Ho Tse, Z.T.; Ren, H. Deep Reinforcement Learning for Soft, Flexible Robots: Brief Review with Impending Challenges. Robotics 2019, 8, 4. [Google Scholar] [CrossRef] [Green Version]
- Mohammed, M.Q.; Chung, K.L.; Chyi, C.S. Review of Deep Reinforcement Learning-Based Object Grasping: Techniques, Open Challenges, and Recommendations. IEEE Access 2020, 8, 178450–178481. [Google Scholar] [CrossRef]
- Zhang, T.; McCarthy, Z.; Jow, O.; Lee, D.; Chen, X.; Goldberg, K.; Abbeel, P. Deep Imitation Learning for Complex Manipulation Tasks from Virtual Reality Teleoperation. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 5628–5635. [Google Scholar] [CrossRef] [Green Version]
- Ravichandar, H.; Polydoros, A.S.; Chernova, S.; Billard, A. Recent Advances in Robot Learning from Demonstration. Annu. Rev. Control. Robot. Auton. Syst. 2020, 3, 297–330. [Google Scholar] [CrossRef] [Green Version]
- Kalashnikov, D.; Irpan, A.; Pastor, P.; Ibarz, J.; Herzog, A.; Jang, E.; Quillen, D.; Holly, E.; Kalakrishnan, M.; Vanhoucke, V.; et al. QT-Opt: Scalable Deep Reinforcement Learning for Vision-Based Robotic Manipulation. arXiv 2018, arXiv:1806.10293. [Google Scholar]
- OpenAI; Akkaya, I.; Andrychowicz, M.; Chociej, M.; Litwin, M.; McGrew, B.; Petron, A.; Paino, A.; Plappert, M.; Powell, G.; et al. Solving Rubik’s Cube with a Robot Hand. arXiv 2019, arXiv:1910.07113. [Google Scholar]
- Leibo, J.Z.; Zambaldi, V.; Lanctot, M.; Marecki, J.; Graepel, T. Multi-Agent Reinforcement Learning in Sequential Social Dilemmas. arXiv 2017, arXiv:1702.03037. [Google Scholar]
- Xie, A.; Losey, D.P.; Tolsma, R.; Finn, C.; Sadigh, D. Learning Latent Representations to Influence Multi-Agent Interaction. arXiv 2020, arXiv:2011.06619. [Google Scholar]
- Lanctot, M.; Zambaldi, V.; Gruslys, A.; Lazaridou, A.; Tuyls, K.; Perolat, J.; Silver, D.; Graepel, T. A Unified Game-Theoretic Approach to Multiagent Reinforcement Learning. arXiv 2017, arXiv:1711.00832. [Google Scholar]
- Tampuu, A.; Matiisen, T.; Kodelja, D.; Kuzovkin, I.; Korjus, K.; Aru, J.; Aru, J.; Vicente, R. Multiagent Cooperation and Competition with Deep Reinforcement Learning. PLoS ONE 2017, 12, e0172395. [Google Scholar] [CrossRef] [PubMed]
- Thananjeyan, B.; Balakrishna, A.; Rosolia, U.; Li, F.; McAllister, R.; Gonzalez, J.E.; Levine, S.; Borrelli, F.; Goldberg, K. Safety Augmented Value Estimation From Demonstrations (SAVED): Safe Deep Model-Based RL for Sparse Cost Robotic Tasks. IEEE Robot. Autom. Lett. 2020, 5, 3612–3619. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Xu, H.; Wang, X.; Wu, Y.; Keutzer, K.; Gonzalez, J.E.; Tian, Y. Multi-Agent Collaboration via Reward Attribution Decomposition. arXiv 2020, arXiv:2010.085311. [Google Scholar]
- Wang, C.; Pérez-D’Arpino, C.; Xu, D.; Fei-Fei, L.; Liu, C.K.; Savarese, S. Co-GAIL: Learning Diverse Strategies for Human-Robot Collaboration. arXiv 2021, arXiv:2108.06038. [Google Scholar]
- Lee, J. A Survey of Robot Learning from Demonstrations for Human-Robot Collaboration. arXiv 2017, arXiv:1710.08789. [Google Scholar]
- Vogt, D.; Stepputtis, S.; Grehl, S.; Jung, B.; Ben Amor, H. A System for Learning Continuous Human-Robot Interactions from Human-Human Demonstrations. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 2882–2889. [Google Scholar] [CrossRef]
- Badash, I.; Burtt, K.; Solorzano, C.A.; Carey, J.N. Innovations in surgery simulation: A review of past, current and future techniques. Ann. Transl. Med. 2016, 4, 453. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Smeak, D.D. Teaching Surgery to the Veterinary Novice: The Ohio State University Experience. J. Vet. Med. Educ. 2007, 34, 620–627. [Google Scholar] [CrossRef] [PubMed]
- Tan, X.; Chng, C.B.; Su, Y.; Lim, K.B.; Chui, C.K. Robot-Assisted Training in Laparoscopy Using Deep Reinforcement Learning. IEEE Robot. Autom. Lett. 2019, 4, 485–492. [Google Scholar] [CrossRef]
- Andrychowicz, M.; Wolski, F.; Ray, A.; Schneider, J.; Fong, R.; Welinder, P.; McGrew, B.; Tobin, J.; Abbeel, P.; Zaremba, W. Hindsight Experience Replay. arXiv 2018, arXiv:1707.01495. [Google Scholar]
- Kuznetsov, A.; Shvechikov, P.; Grishin, A.; Vetrov, D. Controlling Overestimation Bias with Truncated Mixture of Continuous Distributional Quantile Critics. In Proceedings of the International Conference on Machine Learning, PMLR, Vienna, Austria, 12–18 July 2020; pp. 5556–5566. [Google Scholar]
- Johnen, B.; Kuhlenkoetter, B. A Dynamic Time Warping Algorithm for Industrial Robot Motion Analysis. In Proceedings of the 2016 Annual Conference on Information Science and Systems (CISS), Princeton, NJ, USA, 16–18 March 2016; pp. 18–23. [Google Scholar] [CrossRef]
- Coumans, E.; Bai, Y. PyBullet, a Python Module for Physics Simulation for Games, Robotics and Machine Learning 2016–2018. Available online: http://pybullet.org (accessed on 1 November 2021).
- Raffin, A.; Hill, A.; Ernestus, M.; Gleave, A.; Kanervisto, A.; Dormann, N. Stable Baselines3. 2019. Available online: https://github.com/DLR-RM/stable-baselines3 (accessed on 1 November 2021).
- Jarrassé, N.; Charalambous, T.; Burdet, E. A framework to describe, analyze and generate interactive motor behaviors. PLoS ONE 2012, 7, e49945. [Google Scholar]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).



 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}