1. Introduction
LoRa has several unique characteristics in the Low Power Wide Area Network (LPWAN) space, but its principal advantages are long range communication with extremely low power draw [
1]. LoRa is based on Chirp Spread Spectrum (CSS) radio modulation in the 433, 868 and 915 MHz bands [
2]. LoRa technology brings the potential for battery-powered sensors to operate for up to 10 years without requiring recharging or battery replacement [
3]. This provides multiple new applications for Internet-of-Things (IOT) devices covering large distances and requiring minimal infrastructure expenditure. A single LoRa gateway is able to support thousands of concurrent devices [
4] which provides the potential for sensor networks to be rapidly deployed over expansive sites cheaply, and quickly integrated into existing systems [
5]. In order to accomplish LoRaWAN networks over large distances, a star of stars network topology is typically utilised with several gateways [
6]. Recently simulation has been completed showing that LoRa with appropriate modulation improvements can be used for reliable satelite communications in low earth orbit applications [
7].
LoRa as a technology is placed inside the LPWAN space with other notable technologies such as Bluetooth Low Energy, Sigfox, NB-IoT, Ingenu, EC-GSM, to name a few. Within this category technologies are often grouped based on their use of a licensed or unlicensed frequency band, with Sigfox, LoRa, and Ingenu using unlicensed frequencies [
8]. The focus of this work is long-range battery-powered nodes, which excludes short range technologies such as Bluetooth.
Table 1 shows a high level comparison of the most common wireless networking protocols and LoRa. Another technology, (not shown in
Table 1) is Sigfox, both LoRa and Sigfox offer high range low power communication, however Sigfox does not allow for private networks and gateways, is limited to a 12 Byte message size, and has restrictions on the number of messages sent per day [
9]. LoRa has a larger maximum payload size and no restriction on message size. LoRa is well suited for our use case, allowing long-range data transmission, encryption, and the ability to leverage private gateways and be used in an offline installation. In the last 10 years, LoRa has garnered an exponential increase in interest due to its properties including low power, long-range, and low-cost chipset [
10].
In order for the benefits of LoRa to be properly utilised for a remote node, the power requirements are key. In many application environments it may not be necessary to transmit data using the maximum distance settings. For example Liang et al. showed that a single LoRa gateway could maintain acceptable signal strength placed at any position in a 12 story building [
12]. In this case, sensors destined to be closer to the gateway could operate at lower transmission power and higher data-rates to save power. Most devices are designed to be powered through battery, or energy harvesting devices (e.g., small solar panels), where every mW of power consumed to send a message is important to the usability of the device. If power consumption per message is brought to an absolute minimum then either the battery life of the unit can be extended or the transmission interval can be increased in energy harvesting applications.
In order to prototype applications for this technology it is commonplace to begin by purchasing a development kit containing a Micro Controller Unit (MCU) and a LoRa radio. There are many such prototype boards available and those which we interrogated are marketed using the power usage based on deep sleep consumption. This value is incredibly low with typical MCU units able to remain asleep with current values measured in the μA range. However, almost no power consumption figures are presented for transmission in marketing material. Given the lack of manufacturer data available on transmission power requirements it is thus impossible to to make an estimate of the power required for a specific use case. This initial estimate is crucial to investigate as it can provide a fast way to validate the likelihood of success for an application of the technology, i.e., if a specific size, power input requirement, and message interval is specified an engineer is unable to estimate if a LoRa module can successfully provide a solution.
With the work presented in this paper a formulaic power estimate is provided allowing a designer to consider the likely transmission characteristics required and subsequently estimate the battery size required and transmission interval possible.
3. Multiple Boards Comparison
Background research into the factors which effect the power consumption of a LoRa device result in an extremely long list of factors. Testing the impact of each factor individually would be prohibitively slow, so, where possible, all factors were fixed in order to attempt to standardise the testing environment between the boards. The antenna, power supply, firmware settings, gateway, application server, distance from gateway, message contents, delay, and room temperature, all remained constant.
The power consumption data were recorded using the SourceMeter in CSV export function at 100 Rdgs/S and the values measured were current and source voltage. The results were analysed in Matlab and the resulting current curves synchronised to provide the outcome plot show in
Figure 1.
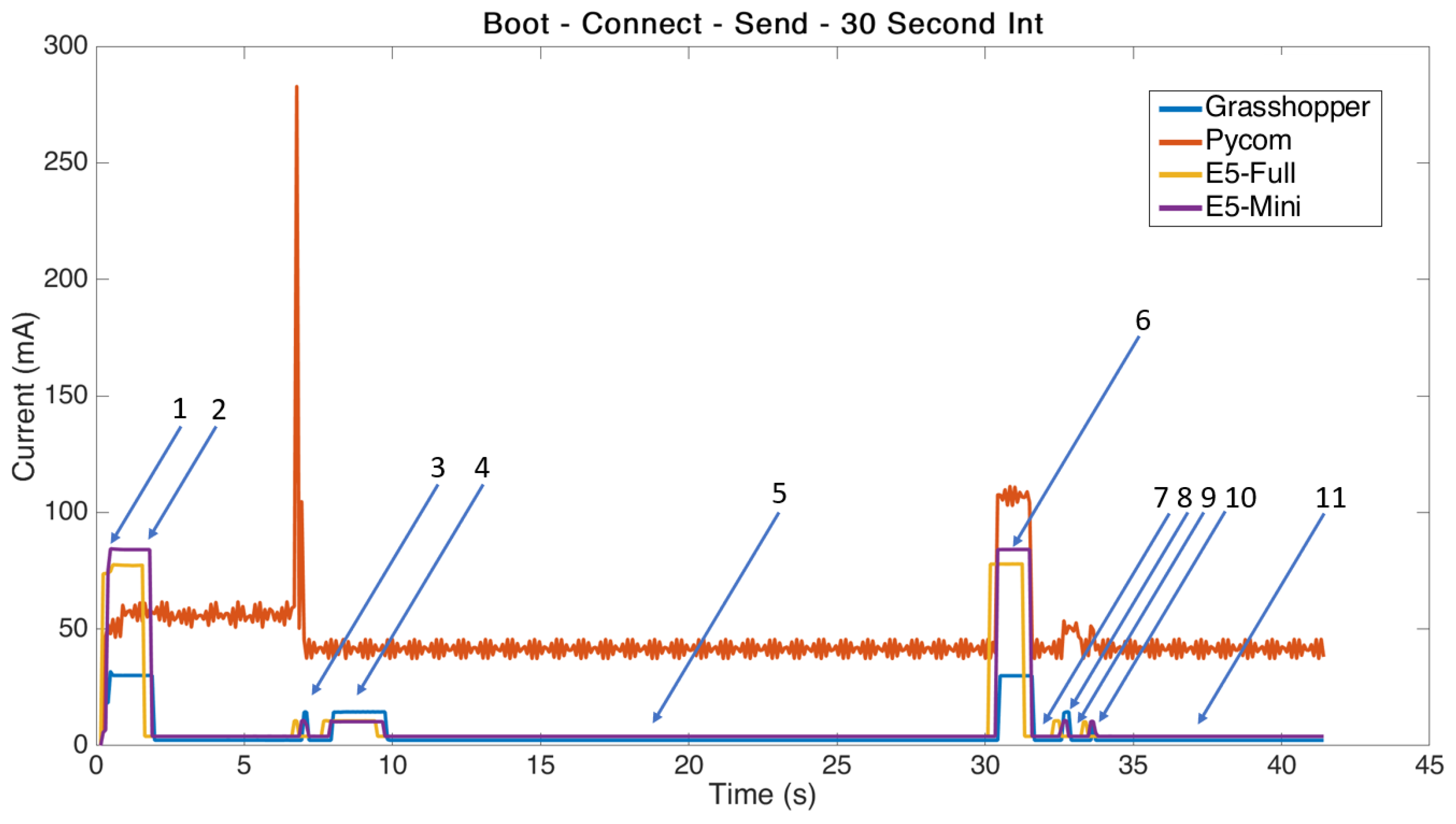
Figure 1.
Power consumption for different prototyping boards. (state descriptions in
Table 5).
Figure 1.
Power consumption for different prototyping boards. (state descriptions in
Table 5).
From analysis of
Figure 1 we can see some interesting behavior. Firstly, it is quickly apparent that the Pycom board uses significantly more power than that of the others when performing the same task. It should be noted that the Pycom board contains a Python micro environment and has far more advanced features than that of the other boards tested. However, it is also marketed as a low power consumption device and it is clearly evident that its idle power consumption is significantly higher than that of the more simple boards. This follows logically as any device with higher computing performance will consume more power and generate more heat in general. However, in applications such as remote battery powered sensors it is unlikely that the extra computing performance of the Pycom board is necessary given the significant power cost attributed to it.
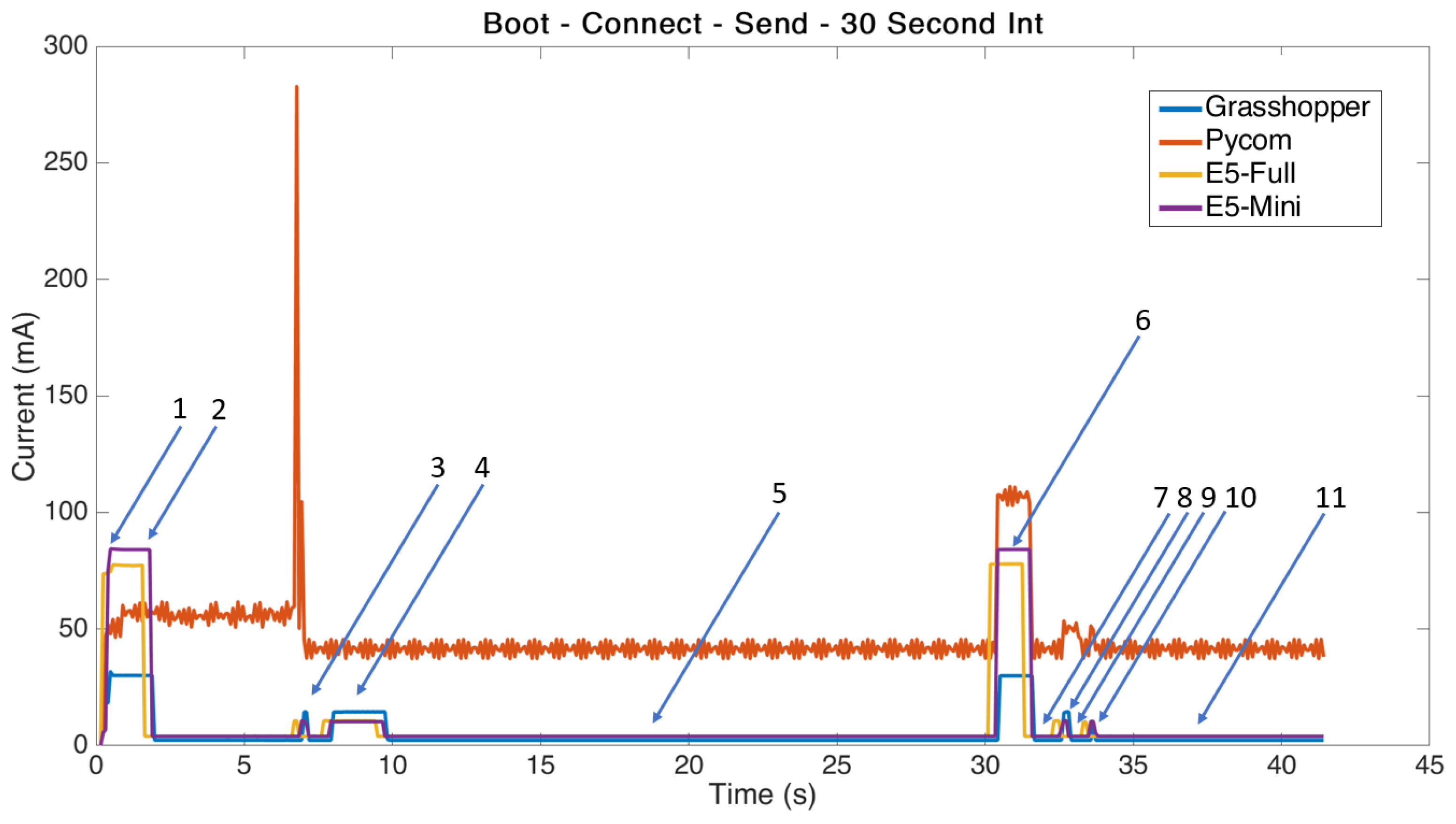
In order to analyse how repeatable the power consumption required for the test was, repeats were carried out and the plots for this test are shown in
Figure 2. It can be concluded that multiple tests show very little variance in the power profile consumed to accomplish the same task and there is very little variability. However, the Pycom board showed greater variability with a standard deviation of 0.14 W·s as compared to an average deviation of 0.004 W·s for the other boards.
Table 5.
Identified Power Profile Stages and Numerical Results.
Table 5.
Identified Power Profile Stages and Numerical Results.
| State Number | Description | E5-Full | E5-Full | E5-Mini | E5-Mini | Pycom | Pycom | Grhppr | Grhppr |
|---|
| Time (ms) | I (mA) | Time (ms) | I (mA) | Time (ms) | I (mA) | Time (ms) | I (mA) |
|---|
| 1 | Wake Up | 483 | 74.7 | 483 | 84.4 | 896 | 51.9 | 483 | 31.7 |
| 2 | Join Transmission | 1070 | 77.2 | 1324 | 84.1 | 6368 | 55.0 | 1406 | 30.1 |
| 3 | Join Receive 1 | 248 | 10.6 | 331 | 10.7 | 165 | 282.8 | 248 | 14.4 |
| 4 | Join Receive 2 | 1902 | 10.7 | 1986 | 14.48 | 166 | 104.7 | 1986 | 14.5 |
| 5 | Programmed Wait | - | - | - | - | - | - | - | - |
| 6 | Transmission | 1080 | 77.9 | 1080 | 84.1 | 1320 | 111.2 | 1240 | 30.0 |
| 7 | Wait First Window | 910 | 4.0 | 910 | 4.0 | 910 | 45.6 | 910 | 2.3 |
| 8 | Receive First Window | 330 | 10.6 | 330 | 10.7 | 420 | 53.5 | 330 | 14.5 |
| 9 | Wait Second Window | 660 | 4.0 | 660 | 4.0 | 410 | 33.4 | 660 | 2.3 |
| 10 | Receive Second Window | 250 | 10.2 | 330 | 10.4 | 250 | 51.3 | 170 | 8.5 |
| 11 | Idle | - | - | - | - | - | - | - | - |
Casals et al. found that there are 11 distinct states in the LoRa modem transmission power profile and these are described in detail in their paper [
15]. For comparison purposes their states are displayed in
Table 6. The results from our power profile analysis, shown in
Figure 1 and
Figure 2, show agreement with the majority of the phases described in their work; however, there were some discrepancies. Casals et al.’s power profile does not appear to capture a difference between the “joining” of the network and transmission of the message. This may be because they did not program an intentional delay as we did, which may have resulted in the joining and message transmittal events occurring at the same time, or perhaps their results were from a board which had already joined the network and had been powered on for some time. The power profiles we obtained clearly show a spike approximately 5 s after boot up, which is consistent in timing with the network acknowledgement of joining. We then observe the programmed delay followed by transmission. It is likely this separate power profile step was amalgamated into their analysis due to immediately transmitting the data after joining. This is interesting to note as the current profile is different for both the joining and normal message transmission events.
By interrogating our results shown in
Table 5, it is evident that the timing is quite consistent for the duration of events identified. The Pycom board’s results show slightly different timing duration for events and this is likely due to error caused by the noise in the generated current waveform. The noise present on the generated data made it more difficult to accurately identify when different stages are beginning and thus affects the accuracy of the timing results for this board.
It was expected that timing would be consistent due to the nature of the LoRa protocol determining when each event takes place. The duration for the first and second receive windows are detailed in the LoRaWAN regional parameters document. There is critical difference between the first and second receive window specifications such that the first window allows a flexible data rate (DR) to be adjusted by the user with the second receive window being fixed at a default frequency of 869.525 MHz [
15]. For this reason, it is likely that there would be some variation in receive window power consumption for different data rate up-links depending on which window received the transmission.
In order to enable message receiving, the window timing is not static and instead relies on a fixed duration to ascertain if a message preamble has been detected [
15]. If a preamble is detected then the modem remains active for the duration of time required to receive a complete message. This principle can be clearly in
Figure 1 and
Figure 2 if we look at the duration of time consumed by “Join Receive 2” in contrast to all other receive windows. The program used does not receive any data from the LoRa gateway during normal message transmittal but during the “joining” event it must receive a message to indicate the success or failure of that event, which results in the significantly longer window time of this state in our testing.
The Pycom board proved difficult to analyse during the “Join Event”, showing a completely different waveform and not returning to idle while waiting for a confirmation of join. This is potentially caused by the board containing a different modem and receiving the confirmation during the first receive window. The Pycom board showed an extremely large spike at the expected time of the first receive, which appears to be a transmission, so we were unable to identify the states accurately for this board during this period.
It was unexpected that the power consumption for events would have such a large variability between the boards. With the principal difference in these boards being the MCU controlling the LoRa modem some variation was inevitable; however, we are seeing differences in the magnitude of 4 times the power required during transmission events. The MCU power consumption difference in theory should mostly affect the idle, sleep, and computation phases with a relatively static power offset due to the different clock speeds during transmission. Indeed we saw behaviour similar to this between the E5-Full and E5-Mini boards. The large variance overall in testing is difficult to rationalise given that all parameters in the software remained the same and the same antenna and gateway were used. The difference likely lies in the modem design and firmware application for each board.
Ultimately, these are significant differences which will affect the eventual end product design considerably, and are based on best case scenarios for power consumption, i.e., there are no calculations taking place on the boards or sensors attached, we are only sending raw values.
The variability between different test runs of the same firmware was found to be very low.
Figure 3 shows the variance between the 5 tests that were performed on each board and illustrates the very low standard deviation and range between data points.
Comparison Summary
From research carried out at the outset of this work, a long list of factors influencing the power of our devices was created. Testing the effects of each of them would be prohibitively slow, so we fixed the factors which were appropriate, and tested for parameters we defined as most relevant.
The software parameters which were shown in literature to have the most significant impact on power consumption were the data rate setting, the transmission power settings and the message size. The transmission interval obviously has a significant impact on the device power consumption as well, but this is adjustable to the users requirement and varying the interval will change the overall device power consumption but has no impact on the single message power consumption.
The key insights from the multiple board testing experiment were that the power required varies depending on the construction of the board. This is logical as each board uses a different MCU and thus has a different clock rate. However, considering each board is marketed as low power and manufacturers do not actually provide any power consumption data other than the minimum rated power supply it is clearly important to actually test these devices, as one could falsely believe they are each equivalent. The low variability in power used between tests was encouraging, this shows that if an appropriate model is developed we can accurately determine the power required to send a single message and then multiply this by the number of messages per day and factor in the devices sleep current to estimate the total power consumption.
4. Grasshopper Board In-Depth Analysis
The multiple board comparison testing showed that for the single message experiment the Grasshopper board had the lowest total overall power consumption in every test performed using the same settings and environment. For this reason, this board was selected for further analysis and testing in order to generate a model.
We performed a series of tests on this board by fixing all parameters to the defaults shown in
Table 3 and then varied one parameter of interest in sequence, in order to understand the effects on power consumption. These tests were time consuming due to the requirement to flash new firmware to the board before each run by placing the device in USB boot load mode and then compiling and uploading the firmware. Once the new firmware was in place the device was removed from the computer and installed on the test bench connected to the SourceMeter. Several runs of each parameter were interrogated to ensure consistent results for the average power consumption and the online gateway was checked to ensure the message was successfully delivered. At the end of this process, we had a single data point for the power curve at that setting and the process was repeated using multiple settings across the entire range of acceptable values. In some cases, we intentionally input values outside the allowable parameters to investigate the behaviour of the device with too large or small values configured for settings.
The results from these experiments are compiled into a series of plots shown in the following pages and are broken down into the results of:
These tests are and their results, are described in detail in the following sub sections.
4.1. Multiple Frame Analysis
The graphical results from the test are displayed in
Figure 4. This test was performed slightly different to the one earlier in the Multiple Boards Comparison section. The Grasshopper board was programmed to send a consistent 2 Byte message at an interval of 30 s. The period in between the messages was this time configured to be “deep sleep” state. This allowed us to analyse the sleeping current required in this state in the period in between message transmittals. The results were then post processed in Matlab to find the message power variance, peak message current, and average sleep current.
The test showed that similarly to the previous test, variability was very low with a range of only 6 mWs per message and a standard deviation of 2 mWs. The average sleep current was determined to be 2.50 μA. This result for sleep current fits extremely well with the advertised deep sleep current of 2–3 μA.
The peak message current was measured to be 35.2 mA on average with a similarly low variance comprised of a range of 0.63 mA and a standard deviation of 0.15 mA.
An interesting takeaway from this experiment was that the first two messages show higher power consumption. In order to ensure this was not an outlier, the test was performed several times and the results for the first two frames remained the same. This behaviour appears to be due to the timing being influenced by how long the device takes to join the network in the first frame. During the first frame transmission, the device attempts to connect to the network first, then immediately sends a frame, then sleeps for 30 s. However, it appears the modem does not allow a re-transmision straight away after wake-up and instead causes the device to wait to send the message. This causes the higher power consumption while the device constantly checks for the ‘modem busy’ flag and then eventually sends the second message. This behaviour disappears after the third message and the power profile is consistent thereafter. This behaviour was intriguing and we were able to replicate it by deliberately setting the transmission interval too high, for example to 10 s. The device would similarly receive the ‘modem busy’ flag and would wait, using high power, while constantly checking for the modem to be available to send. This behaviour disappeared when higher transmission intervals were employed.
The results from this test provided the required data for the deep sleep, which will be incorporated in power estimation for the device in this state in the model, and also provide further evidence of the extremely low variability of these devices when sending messages with a fixed parameter set.
4.2. Data Rate Analysis
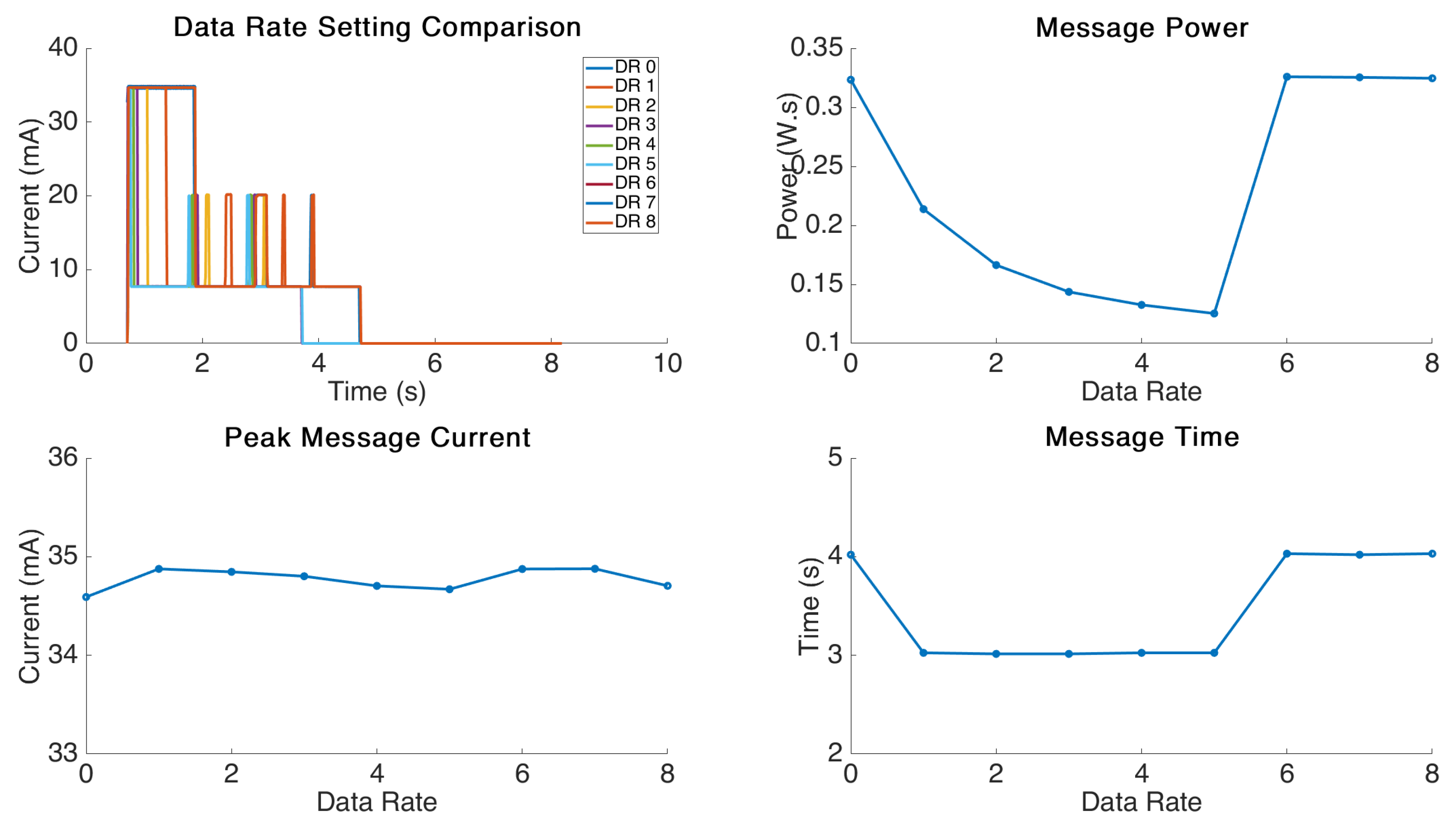
The graphical results for the data rate testing are displayed in
Figure 5. This experiment was performed by sending a standard 2 Byte message using a transmission interval of 30 s and varying the data rate setting from DR-0 to DR-8. The system is unable to deliver at data rate 8 as this is an invalid setting; however, we wanted to investigate the behaviour with an erroneous data rate input. The data rate setting corresponds to an adjustment of the bit rate for transmission which is set in the range 300 bit/s to 5.5 kbit/s [
16]. Increasing the bit rate of the transmission will in turn reduce the time on air required for the message and thus should reduce power consumption, but will also limit the range [
16].
Looking at the power profile delivered from the tests we can see some interesting behaviour. The message power required ultimately reduces with valid increases in the DR setting. This shows good agreement with the results published in other works on this topic [
15,
16,
17]. We can further see that as the transmission bit rate increases there is a staged reduction in message delivery timing from approximately 4 s down to 3 s. This decrease in message time is not linear and instead only steps down to a faster message time at DR1 and then stays static at the 4 s mark. These are likely agreed timings set in the LoRa protocol.
When the data rate is set to an erroneous value (i.e., >DR5) the firmware clearly resorts to using DR0 as the timing and message power immediately returns to match these settings.
The clear trend visible with the data rate setting is that increasing the data rate to the highest setting possible with the transmission distance required will result in an exponential decline in overall power consumption for the device; however, after DR1, it will have no impact on the message delivery time.
4.3. Message Size Analysis
The graphical results for the message size testing are displayed in
Figure 6. This experiment was performed by fixing the static values to defaults similar to the previous experiments and slowly increasing the message size in order to generate a trend line for the effect of message size on power consumption.
The most interesting behaviour shown in the experiment was the stepped message time result. This result matches previous results such as in the data rate experiment which resulted in a similar stepped response for message delivery time rather than a linear increase. It appears the LoRa protocol opens a further window for larger messages which results in it remaining open for a fixed duration regardless of when the message is completed. We found this behaviour to begin at a message size of 19 Bytes and continue right through until the maximum size we tested which was 51 Bytes, the maximum for DR0 [
6].
The peak message current showed some variation but there was no obvious trend and it appeared random, the variation was less than 5 mA between highest and lowest readings.
The message power showed a linear increase with message size up to the threshold value of 19 Bytes and then a significant jump caused by the opening of the longer transmission window. It then showed a similar linear increase from 19 Bytes to the maximum tested value of 51 Bytes.
These results are interesting as they show a significant power ‘overhead’ for increasing the data transmitted over this threshold by one Byte. This information is extremely important for design engineers who may be able to tweak designs in order to remain under this threshold value and gain significant energy savings resulting in longer battery life.
The message size analysis shows important threshold behaviour which engineers should be aware of if trying to optimize hardware for extended battery life or higher transmission intervals. With battery-powered IOT hardware it is logical to reduce the message size where ever possible, but this insight shows the dramatic effect a single extra byte can have on of the overall power consumption.
4.4. TX Power Analysis
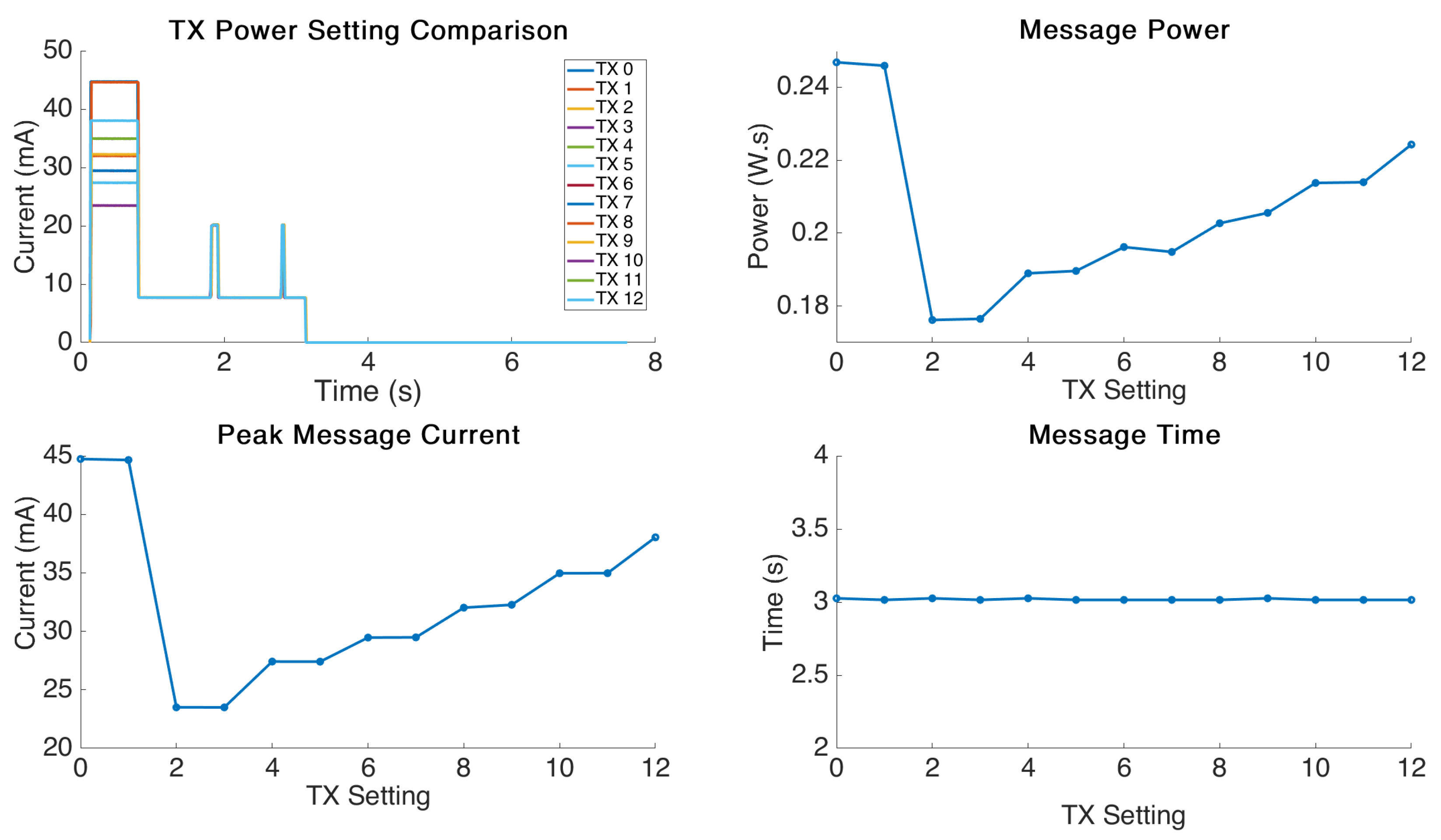
The graphical results for the message size testing are displayed in
Figure 7. This experiment was performed using the default values of DR-0 and a 2 Byte transmission message. The TX power setting was then increased linearly from setting 0 to setting 12. It may be tempting to assume that one will always need maximum TX power for an application, however as compared to Bluetooth and WiFi, LoRa signal transmissions can reach up to kilometers with line of sight [
18]. For this reason, there are actually many applications in which we could make an estimation of the TX power required by using a fraction of the theoretical maximum based on the application environment. Gloria et al. showed that you can achieve up to a 48% reduction in power usage by adapting the TX power of the end node to different situations and this can be accomplished dynamically [
19].
As expected in this section, we see a relatively stable linear power increase with each TX power step as a trend. We also see, as expected, no effect on the message delivery time as a result of manipulating this setting.
We see interesting behaviour at TX setting 1 which causes the highest power consumption possible and appears to be caused by a firmware related problem indicating that TX power setting 2 is actually the lowest permissible value. The documentation for this board was not provided or discoverable, so we were unable to determine the maximum and minimum permitted settings. It appears that the firmware compilation, when faced with an illegal setting, defaults to maximum power output and causes a large jump in power consumption as a result.
Using the data obtained for the linear increase in power consumption, we are able to estimate the impact on the overall consumption from this attribute, which is covered next in the modelling section.
5. Power Model
With the data we collected in the previous sections, we were able to produce a model using linear regression, and fit polynomials to predict the estimated contribution factor from each firmware setting. Due to the natural stepping, which occurred in the message size, the model was separated based on the input as being less than 19 Bytes or greater than 19 Bytes. In order for the reader to replicate the estimation program if required, we have provided the output polynomial coefficients from the regression below:
Datarate Power Contribution (0–5)
TX Value Power Contribution (2–12)
Message Size Power Contribution (1–18 Bytes)
Message Size Power Contribution (18–51 Bytes)
The above formulas yield a variable output power estimate measured in W·s for the amount of energy required to send a single frame of the specified size at the specified data rate and transmission power.
5.1. Power Model Verification
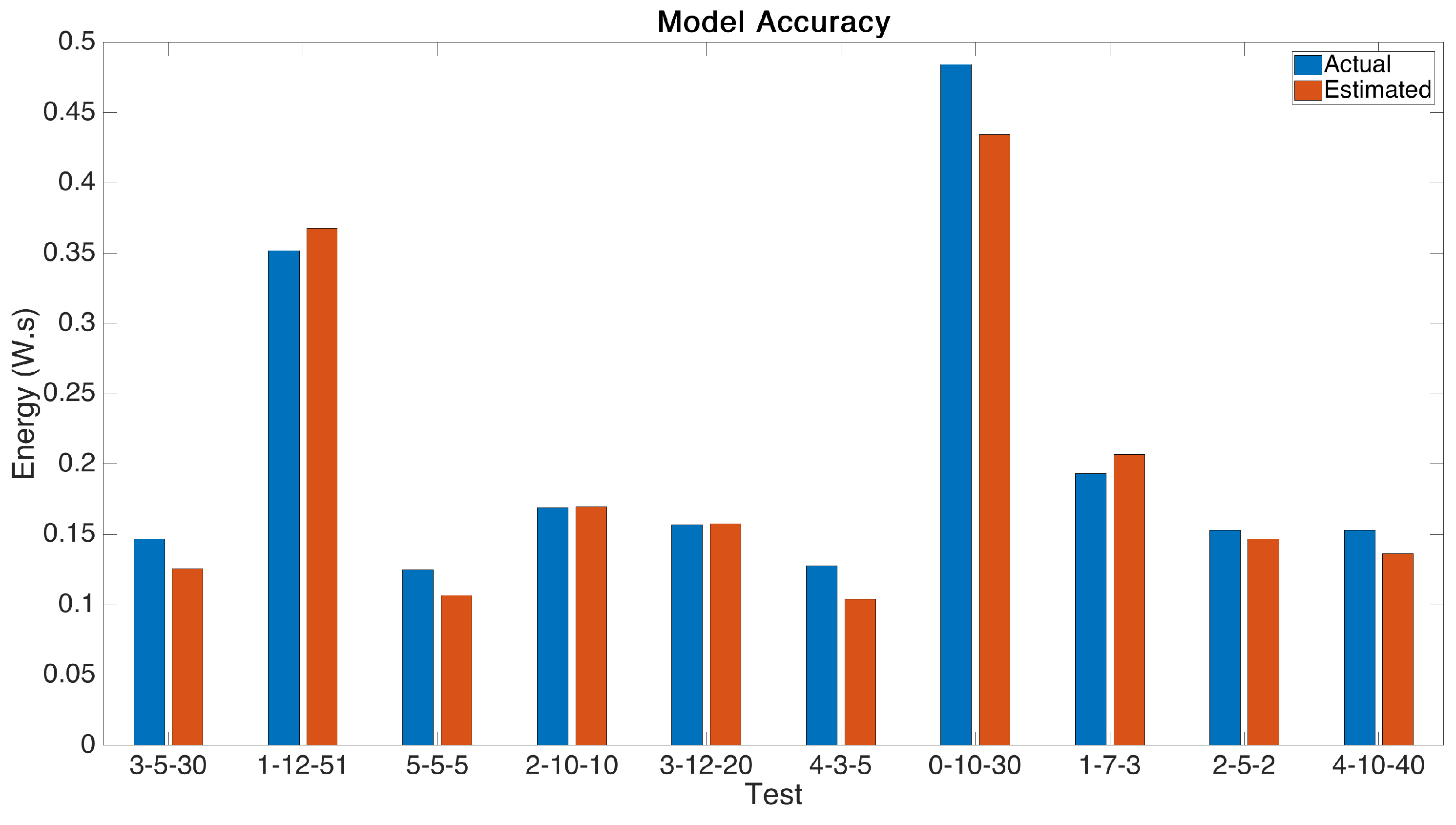
Once the model had been generated based on the testing results, we verified its accuracy using further testing. Input parameters spread over the ranges were randomly selected and and an estimate recorded. The parameters were then compiled and uploaded to the boards and each test point was compared to the experimentally recorded measurement.
Initial testing of our first model iteration identified peaks were the model lacked accuracy and these occurred systemically where there was a high data rate and high message size. We became aware that at low data rates the message size had a significant impact on power consumption, but this effect was greatly diminished at data rates higher than setting 2. We hypothesise that due to the increased bit rate at these data rates, the effect of the larger message was negligible on the overall consumption and updated the model to contain the ‘if’ statement. That is, in the case of a data rate of less than 2, the estimated power includes the message size contribution, but for any other data rate it is ignored.
With this change we were able to arrive at the results shown in
Figure 8. The results show an average mean variation between measured and expected power of 9%.
5.2. Sensors
The testing that has been performed on the Grasshopper board thus far has accounted for variations in message size, data rate, and TX power. With the model created we are able to accurately estimate the power required at different transmission intervals to transmit a message. However, we are currently unable to estimate the power that will be taken by the sensors, which of course read the value that is to be sent.
Several preliminary measurements were carried out using a range of common sensors in order to estimate the power used by them during operation. The sensors did not experience any dynamic power variation and are easily modeled with a static power draw figure over time. The sensors we tested are shown in
Table 7.
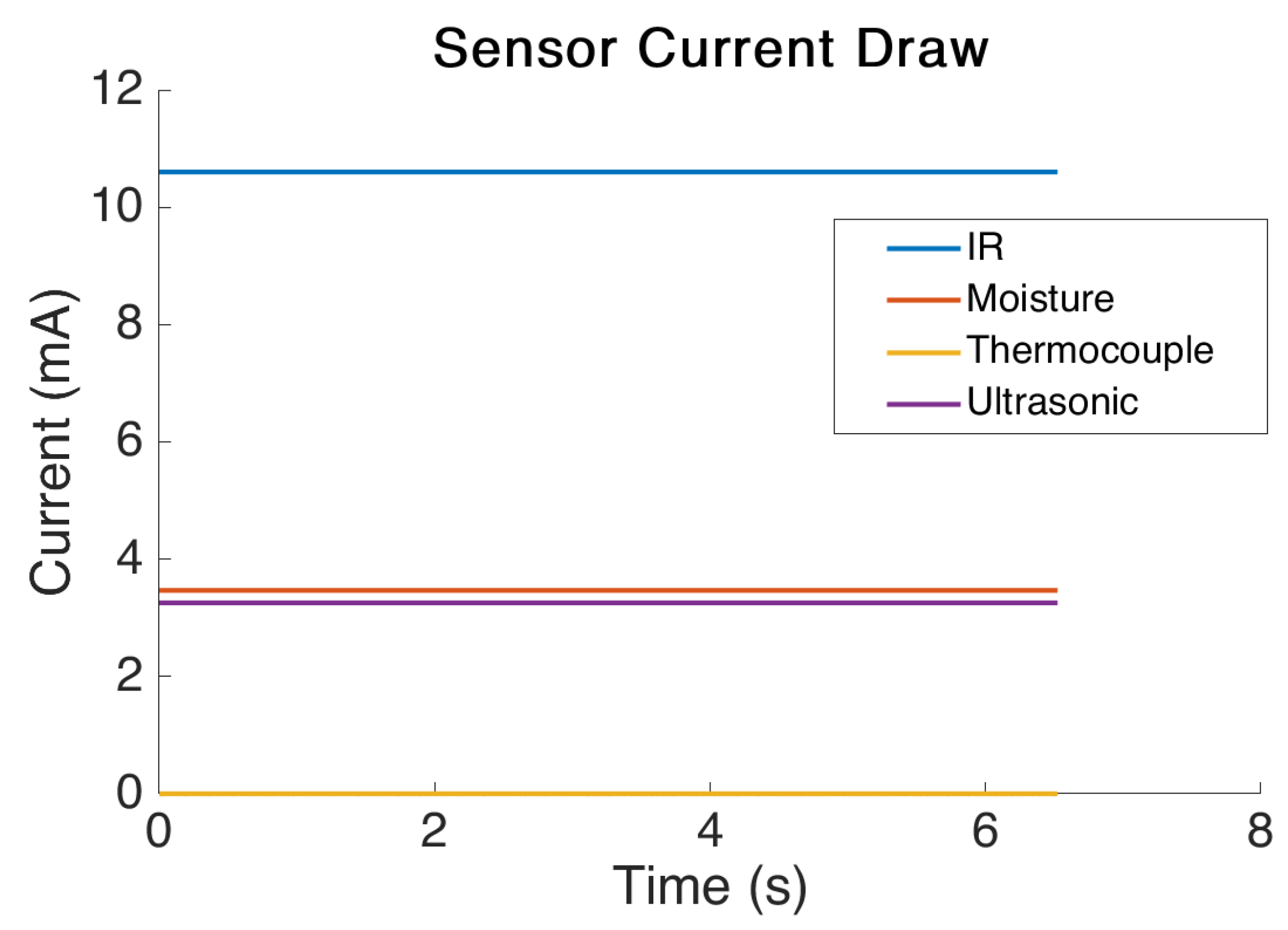
The static power draw test results are shown in
Figure 9. From the results it is clear that the sensors use an extremely small amount of power. The IR sensor used the most power with an average power draw of 10.6 mA. The lowest power sensor tested was the digital thermocouple which used only 0.5 μA of current to power the onboard chip. This figure is the power draw during operation and each sensor utilised must be considered for how long it actually requires being operated. For example, there is no necessity to power a moisture sensor after a reading has taken place but there may be a minimum amount of time it must be powered before an accurate reading can be obtained.
These variable timing figures will need to be investigated and considered for any potential design use case and falls outside the scope of this paper. For the purposes of simple power estimation we can apply an additional sensor current draw ‘overhead’ for the duration of time the LoRa board is running as a worst case. It should be noted there are some sensors (for example CO2 gas sensors) which require running for several minutes before a reading can be taken and this would dramatically effect the overall power consumption, so would need to be considered differently.
5.3. Applying the Model
With the data generated up to this point and the model presented, we can now perform an application on a hypothetical situation. We define a use case as a digital sensor which is approximately 1/4 of the maximum transmission distance from the gateway, which will be sending a single long variable sensor output. We then select likely model settings of DR2, TX3, and a message size of 2 Bytes.
The previously presented model provides an estimated single frame energy of:
W·s
We then define the transmission interval in seconds as:
s
With these figures we can estimate the energy consumption per day as a fraction of the time spent in the message delivery mode, and sleep mode at the given interval. We noted previously that frame time is split dependant upon data rate and message size, from previous results; in this case, it will be 3 s:
s
Therefore:
,
and finally the daily power requirement will be:
If we then assign a battery to the device, we can calculate the estimated battery life between recharge:
This method is not designed to completely remove the requirement for testing, as the accuracy may not be high enough to account for the myriad of variables at play. Moreover, it is to allow a design engineer to quickly make an estimate of how large the battery required will be to operate a device early in the design process, to allow weight and size requirements to be considered before a prototype is even produced, or fully revise the design if it appears unfeasible given other constraints.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}