
LMI-Based H∞ Controller of Vehicle Roll Stability Control Systems with Input and Output Delays



Abstract
:1. Introduction
2. Methodology
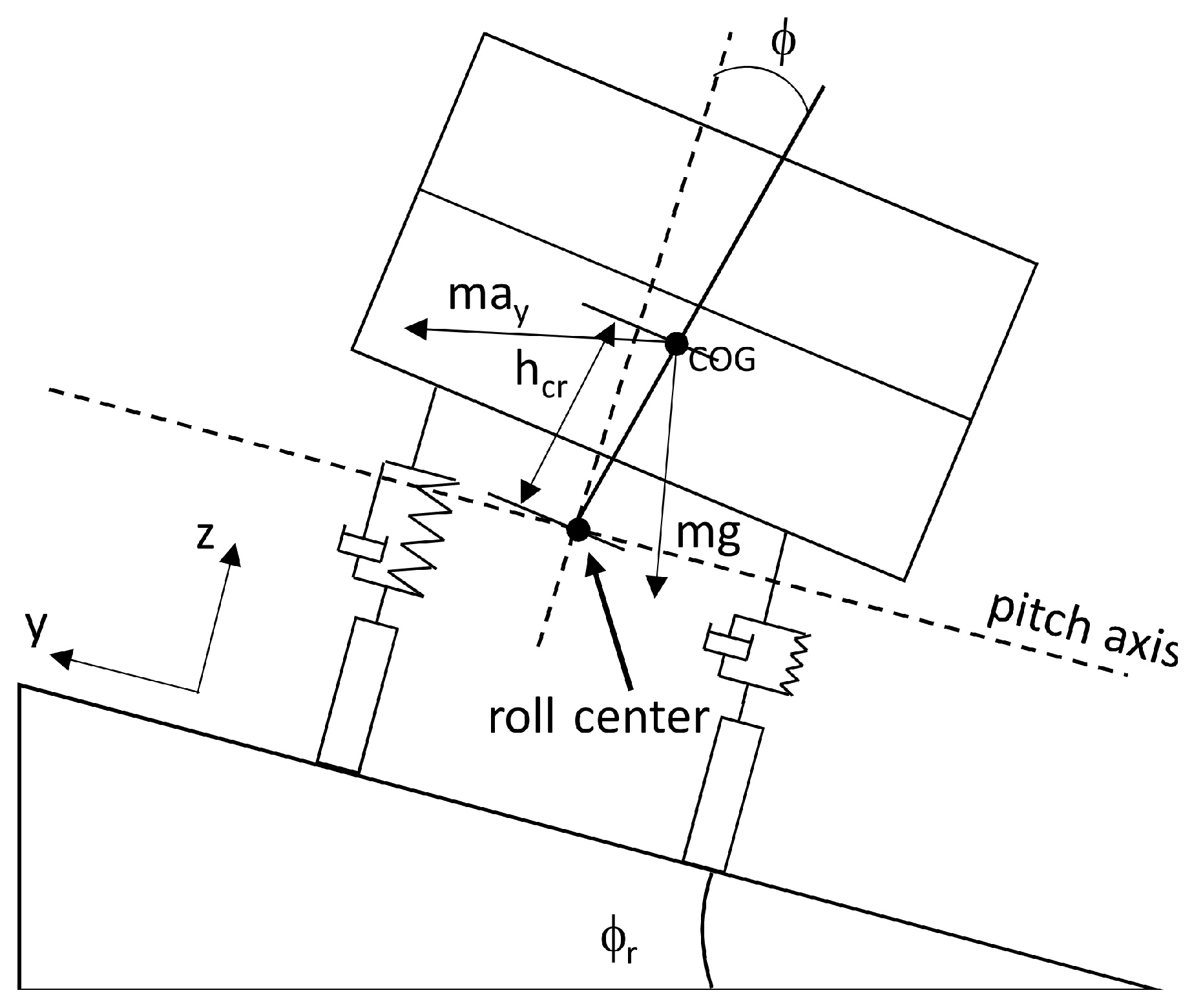
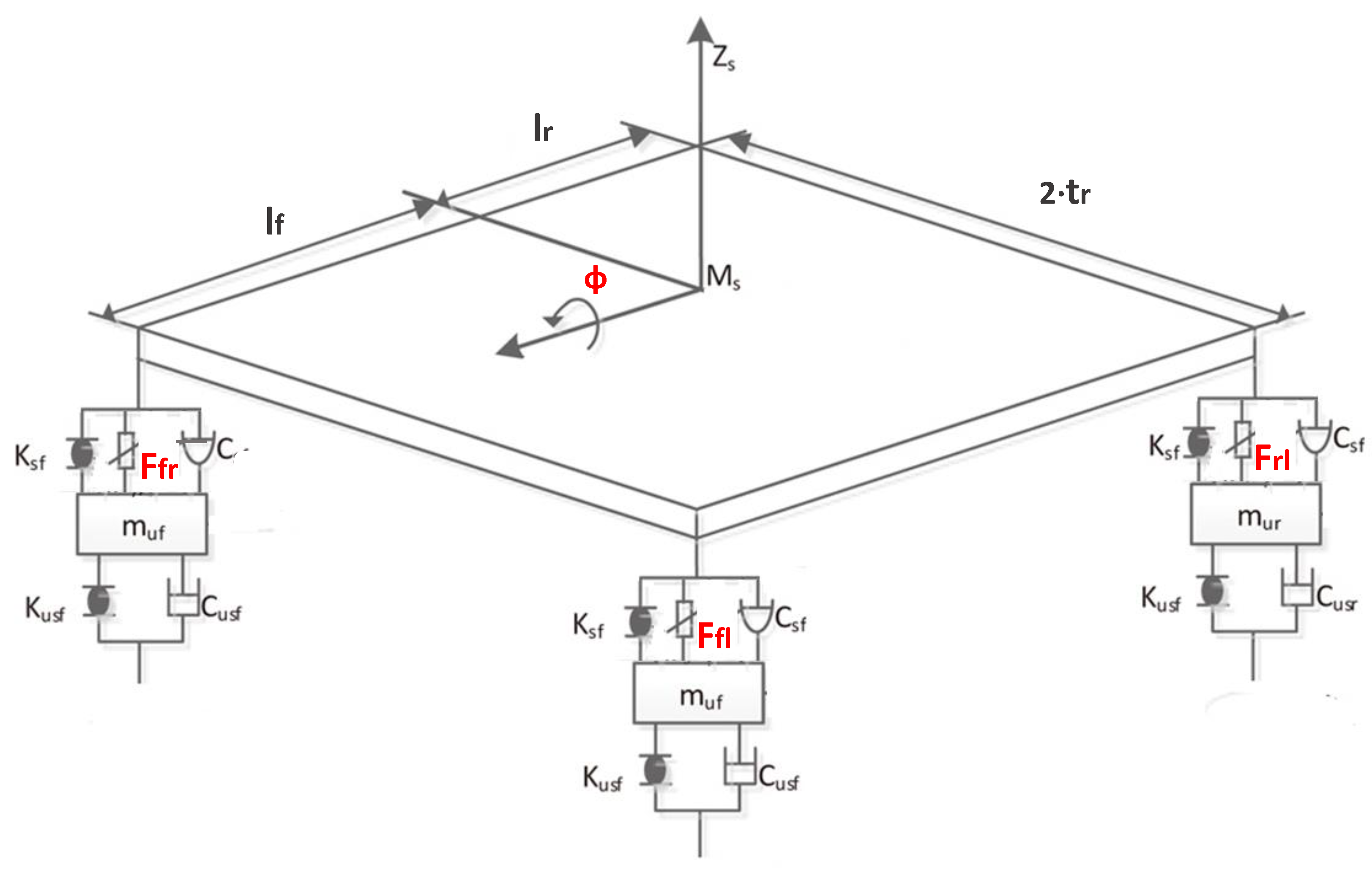
2.1. Vehicle Model Used in the Controller Design
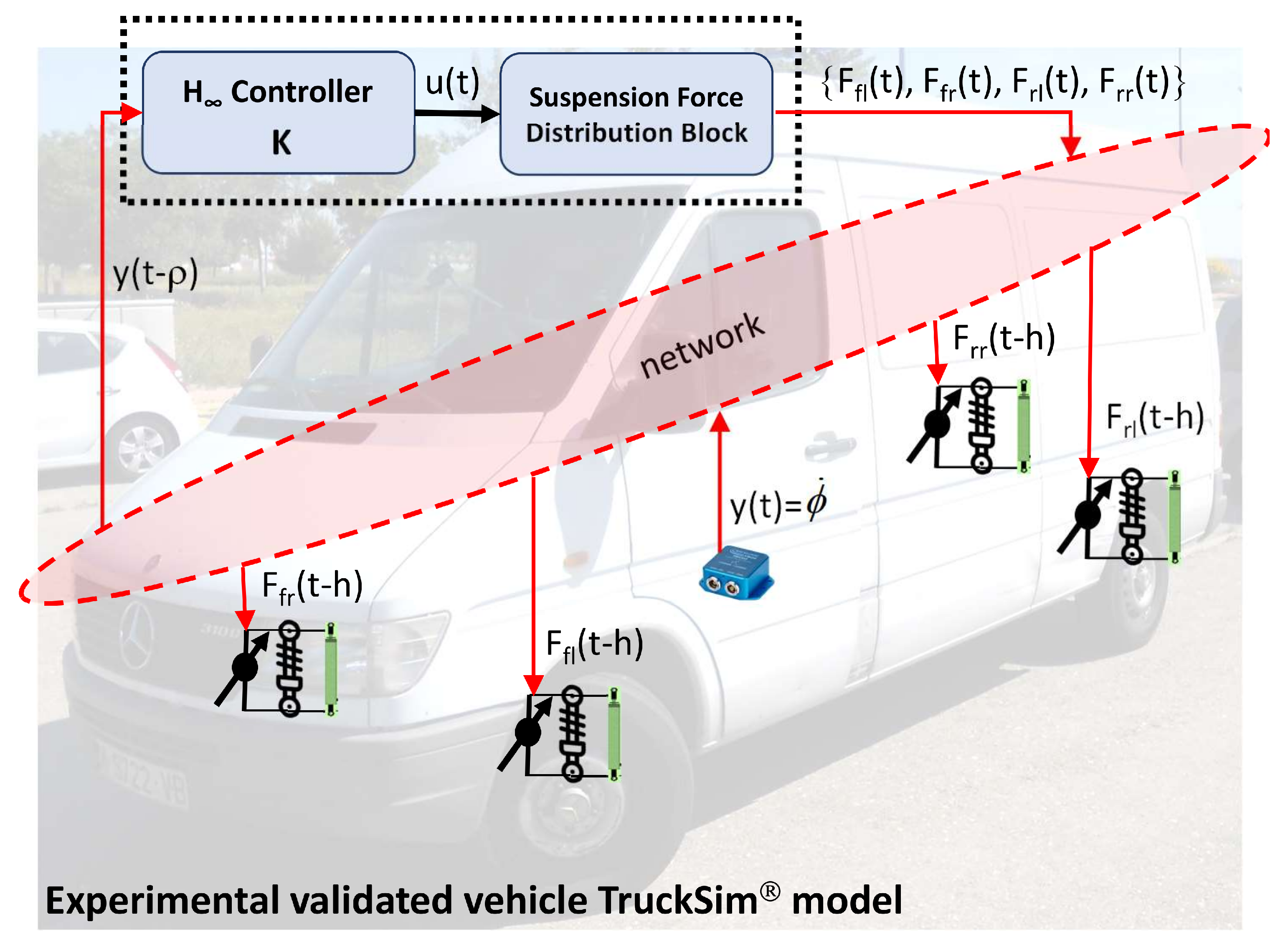
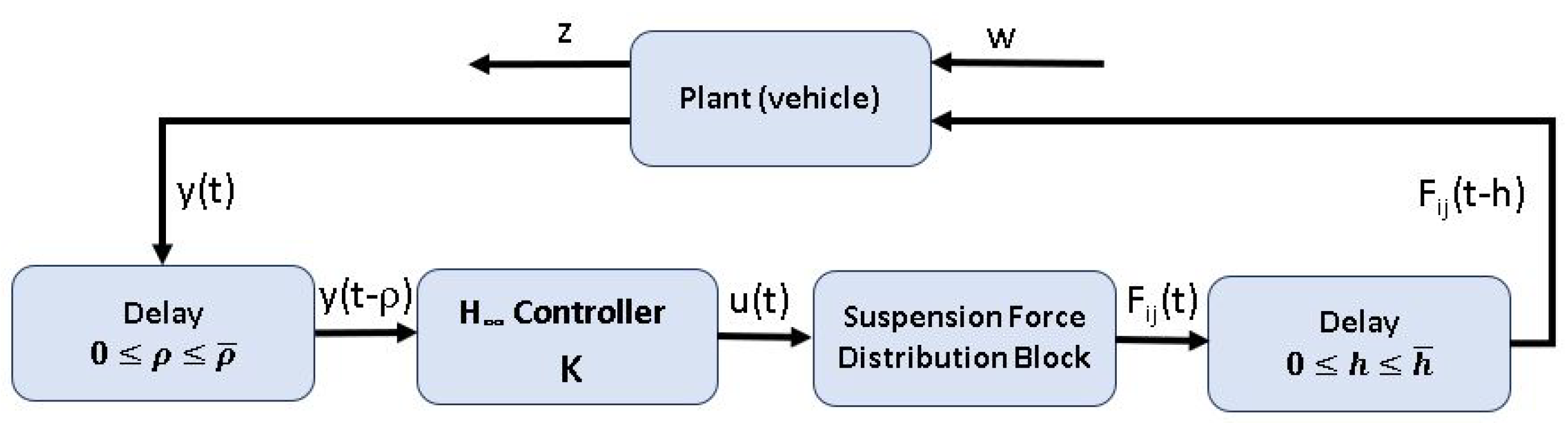
2.2. H Output-Feedback Control Design Considering Network Delays
2.3. H Output-Feedback Controller Design without Considering Network Delays
2.4. Suspension Force Distribution Block
3. Results
3.1. Experiment Specification
- Test 1: A roundabout with a radius of 22 m, at a constant speed of 30 km/h on dry pavement (see Figure 8).
- Test 2: A double lane change at a constant speed of 100 km/h on dry pavement (see Figure 9).
- Test 3: The same roundabout in Test 1, at a constant speed of 120 km/h, in order to evaluate the performance in a more severe test (see Figure 8).
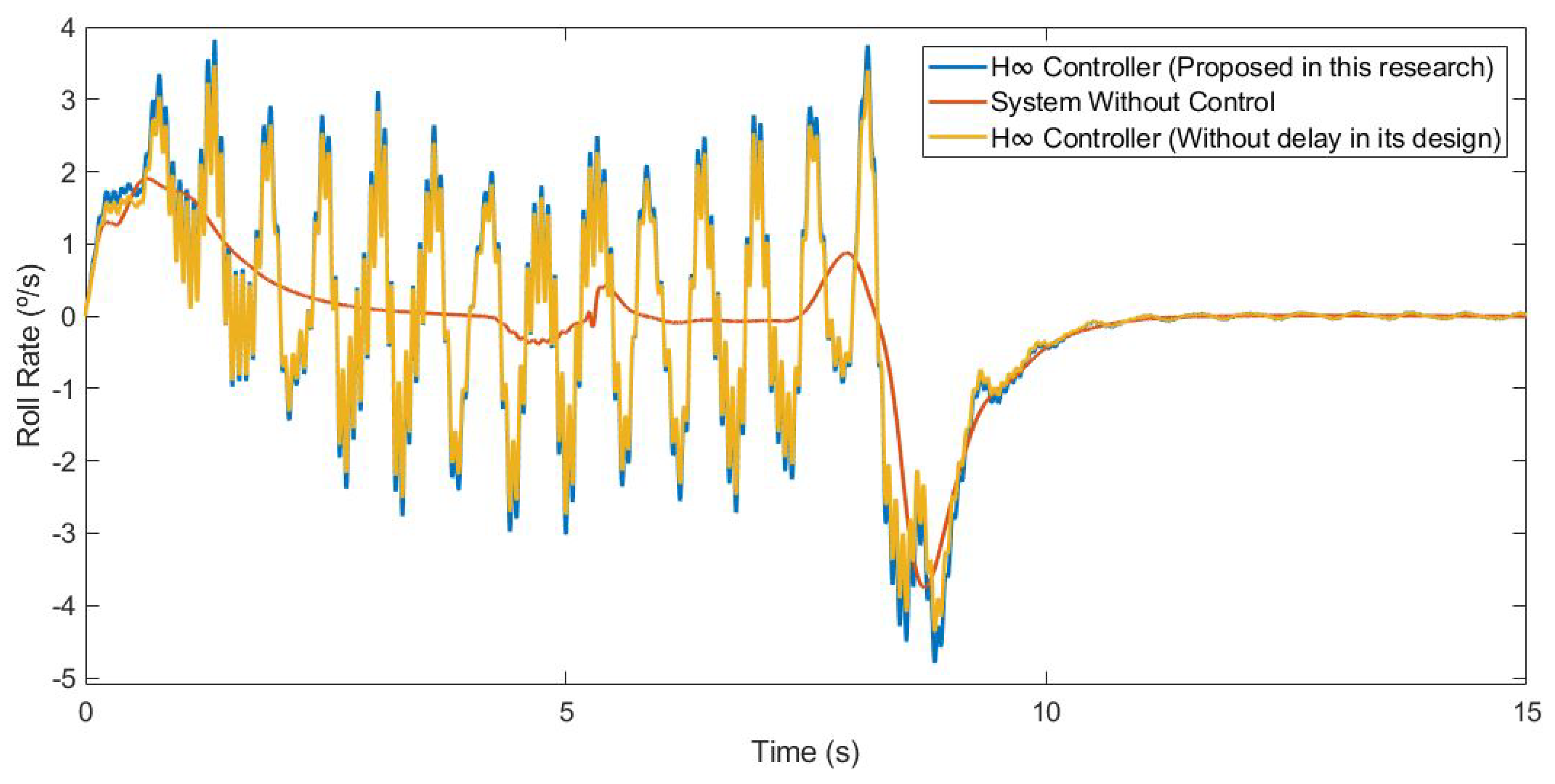
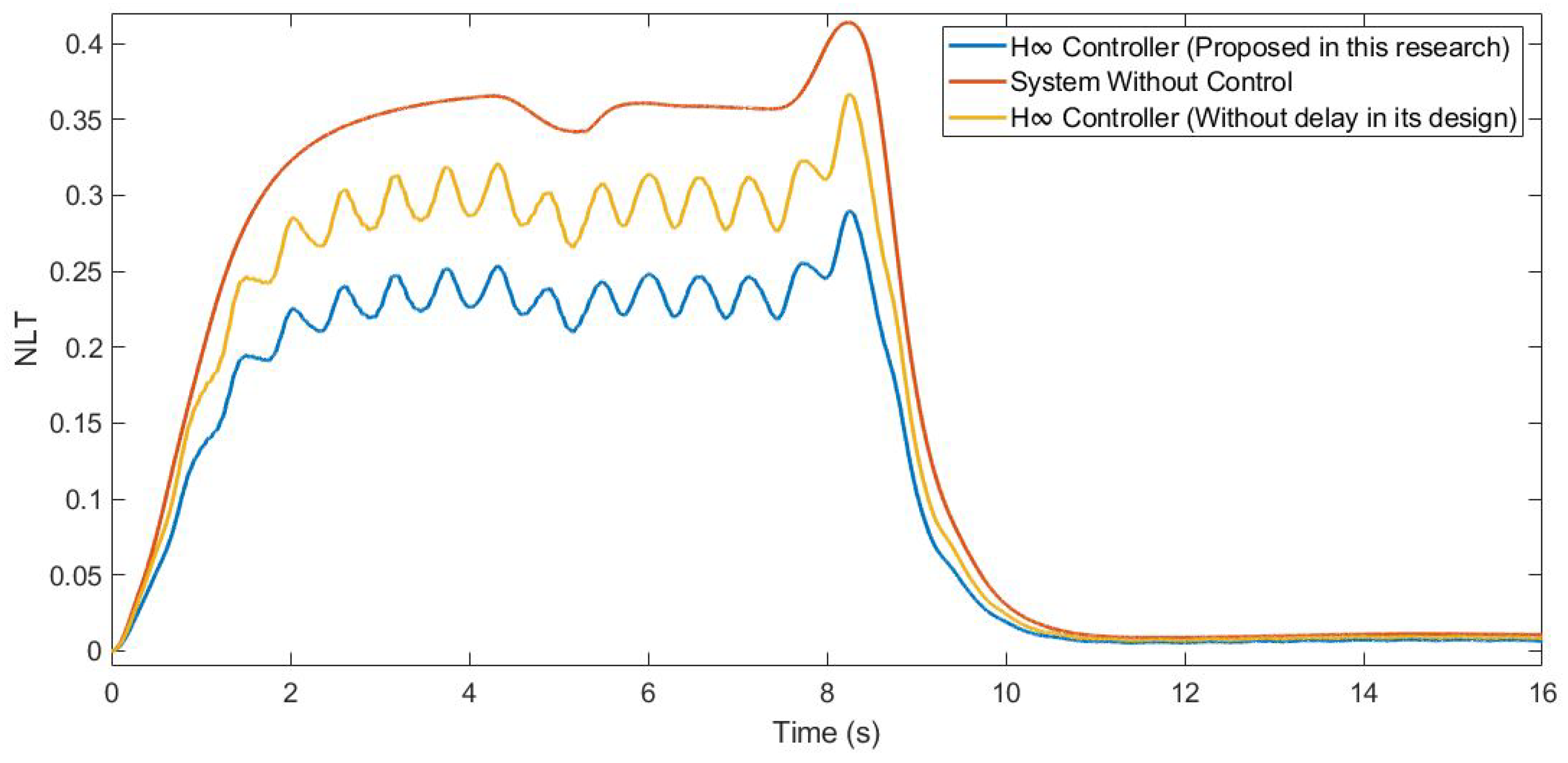
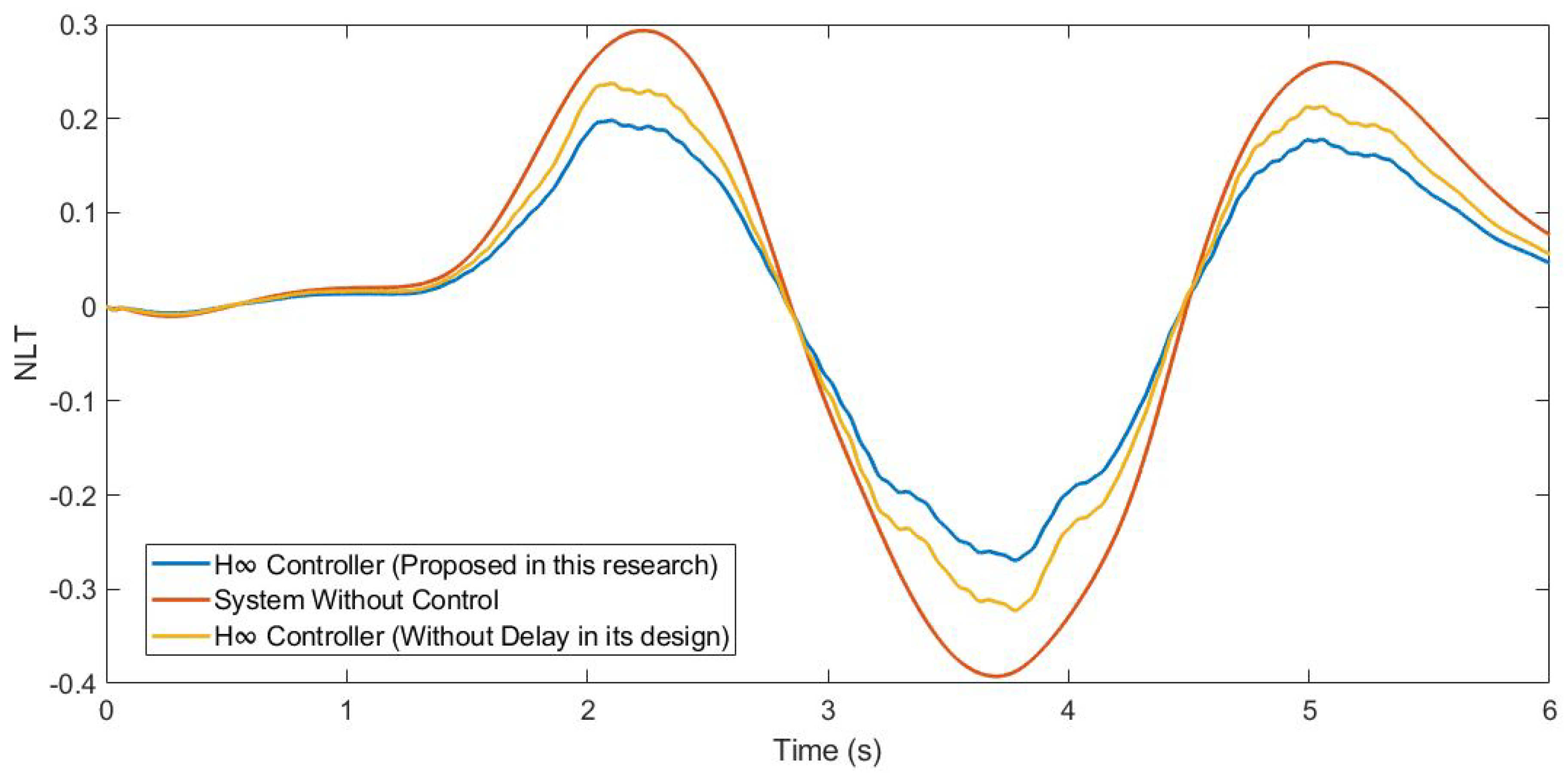
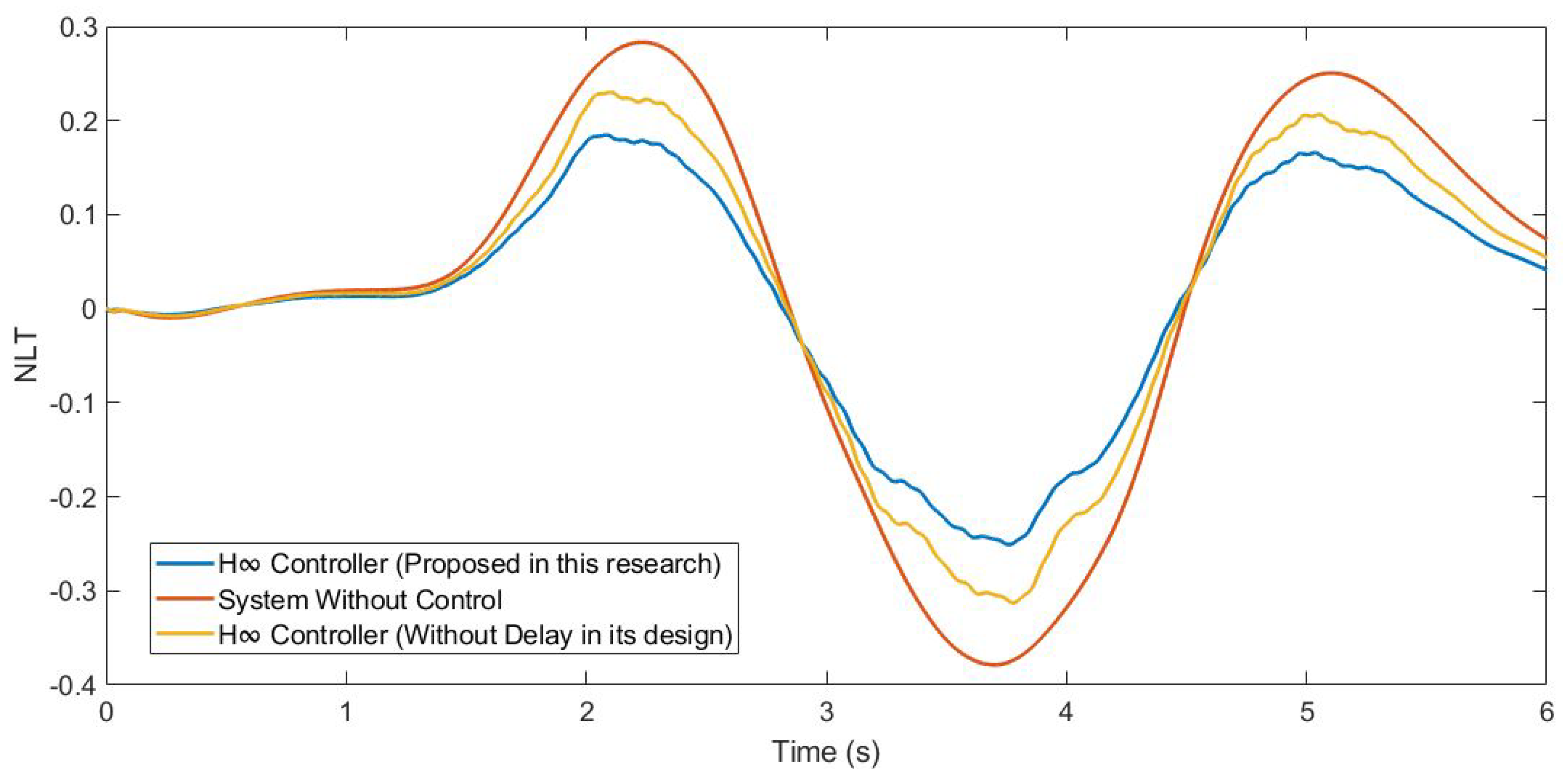
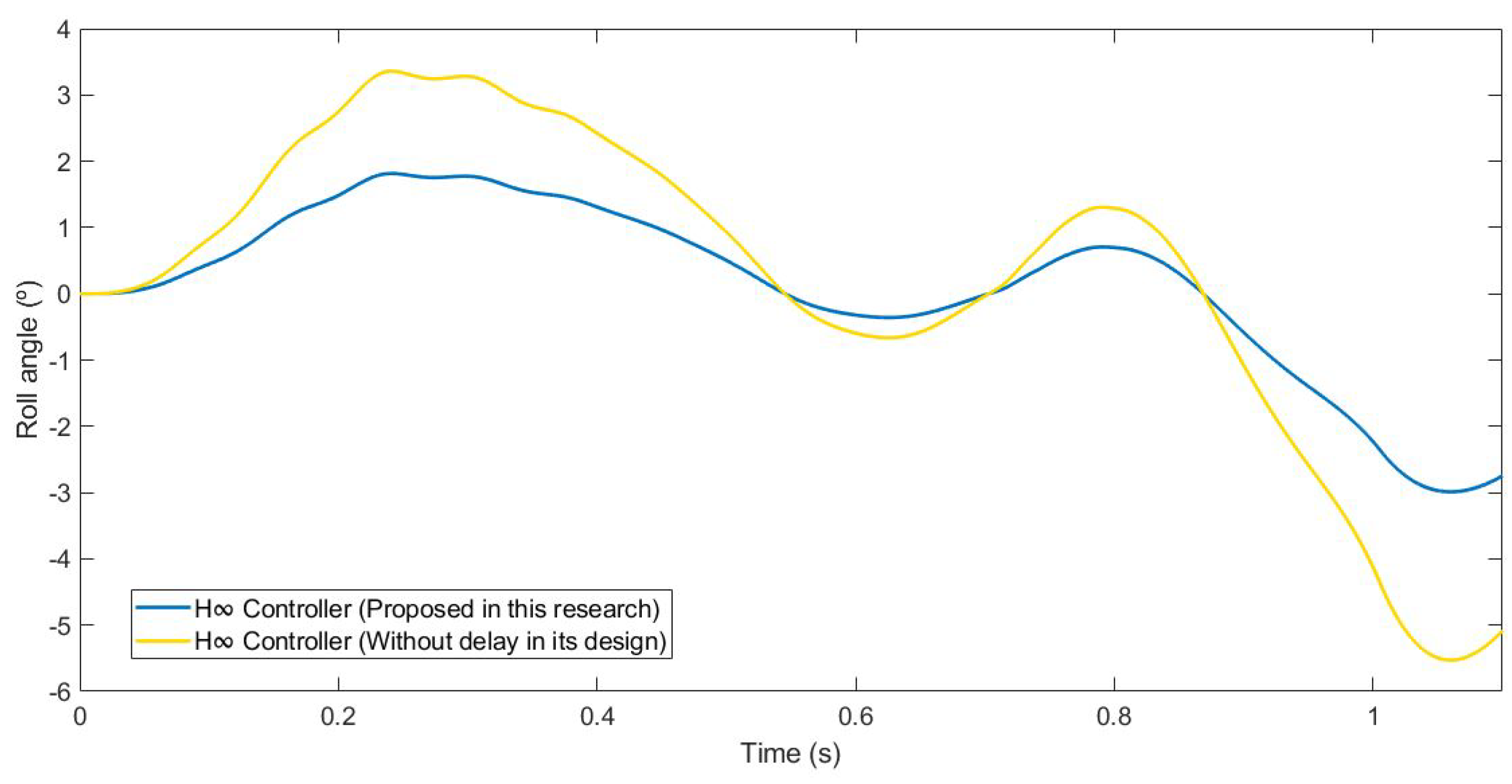
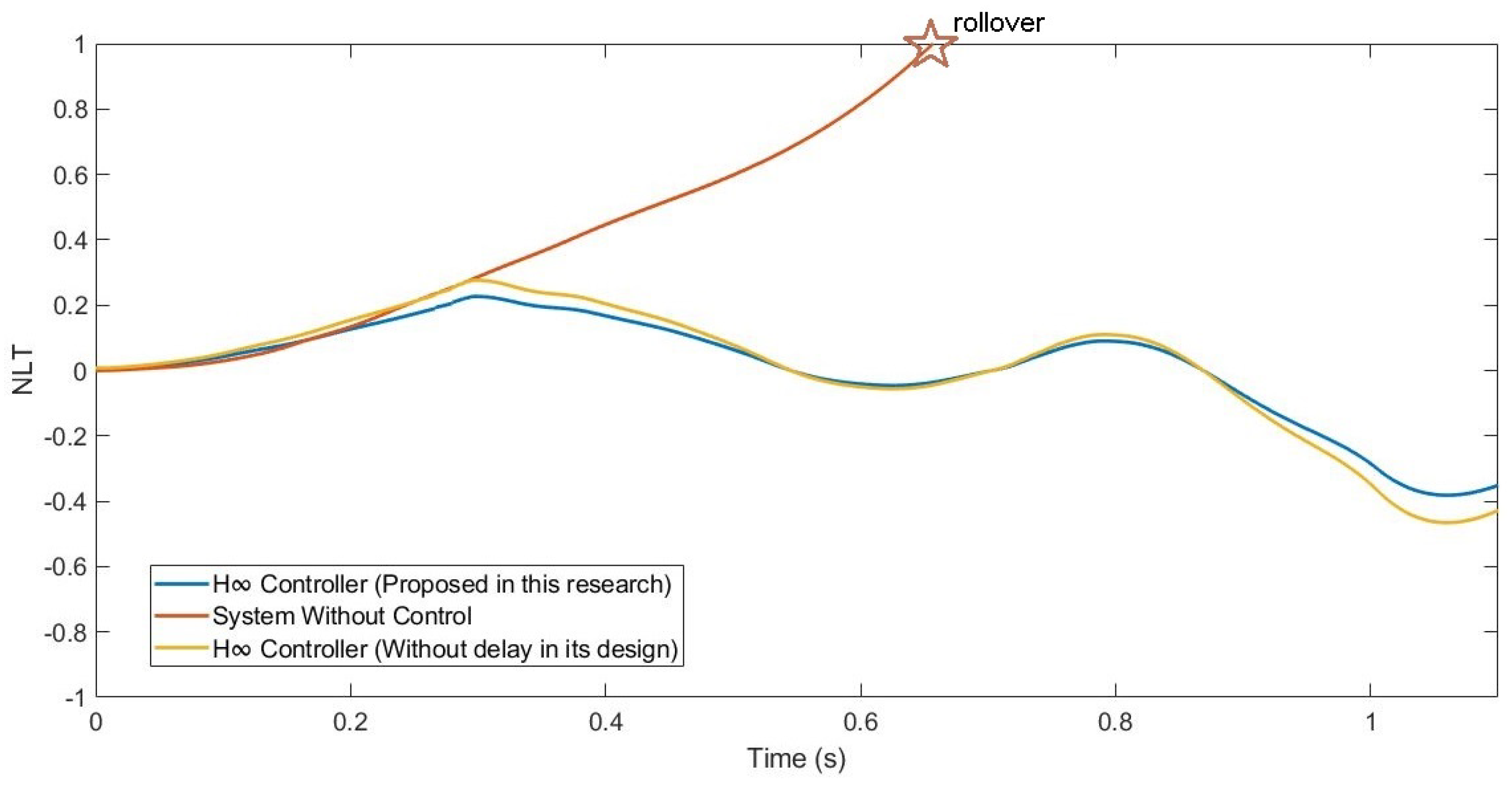
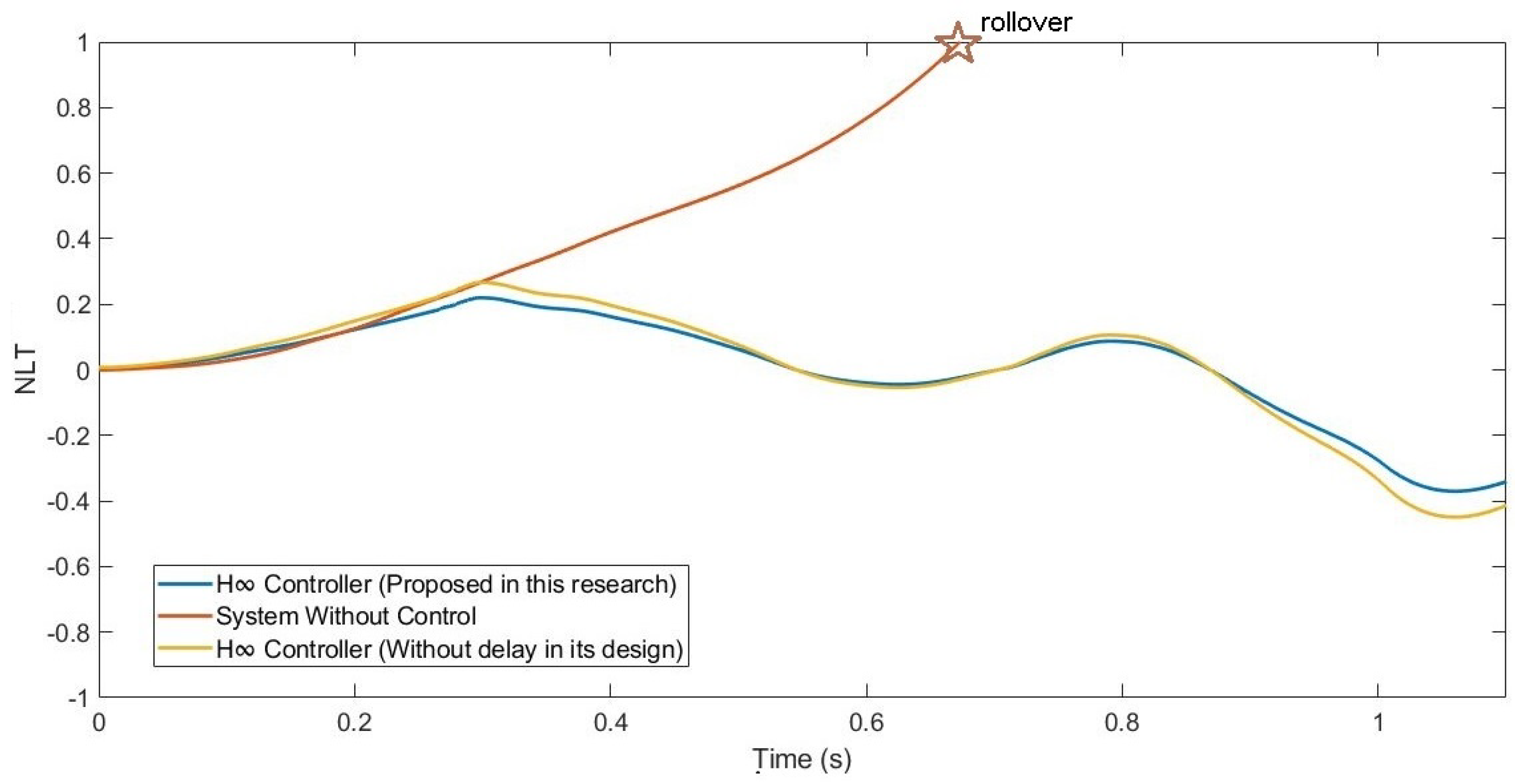
- A simulated scenario, with a delay of applied using the controller proposed in Section 2.2. This simulated scenario will appear in blue with the label “H Controller (Proposed in this research)” in all the figures of Section 3.
- A simulated scenario without a control system. This simulated scenario will appear in red with the label “System Without Control” in all the figures of Section 3.
- A simulated scenario, with a delay of applied using an H controller that did not take into account the delay in its design. This simulated scenario will appear in yellow with the label H Controller (Without delay in its design)” in all the figures of Section 3.
3.1.1. Test 1: Roundabout
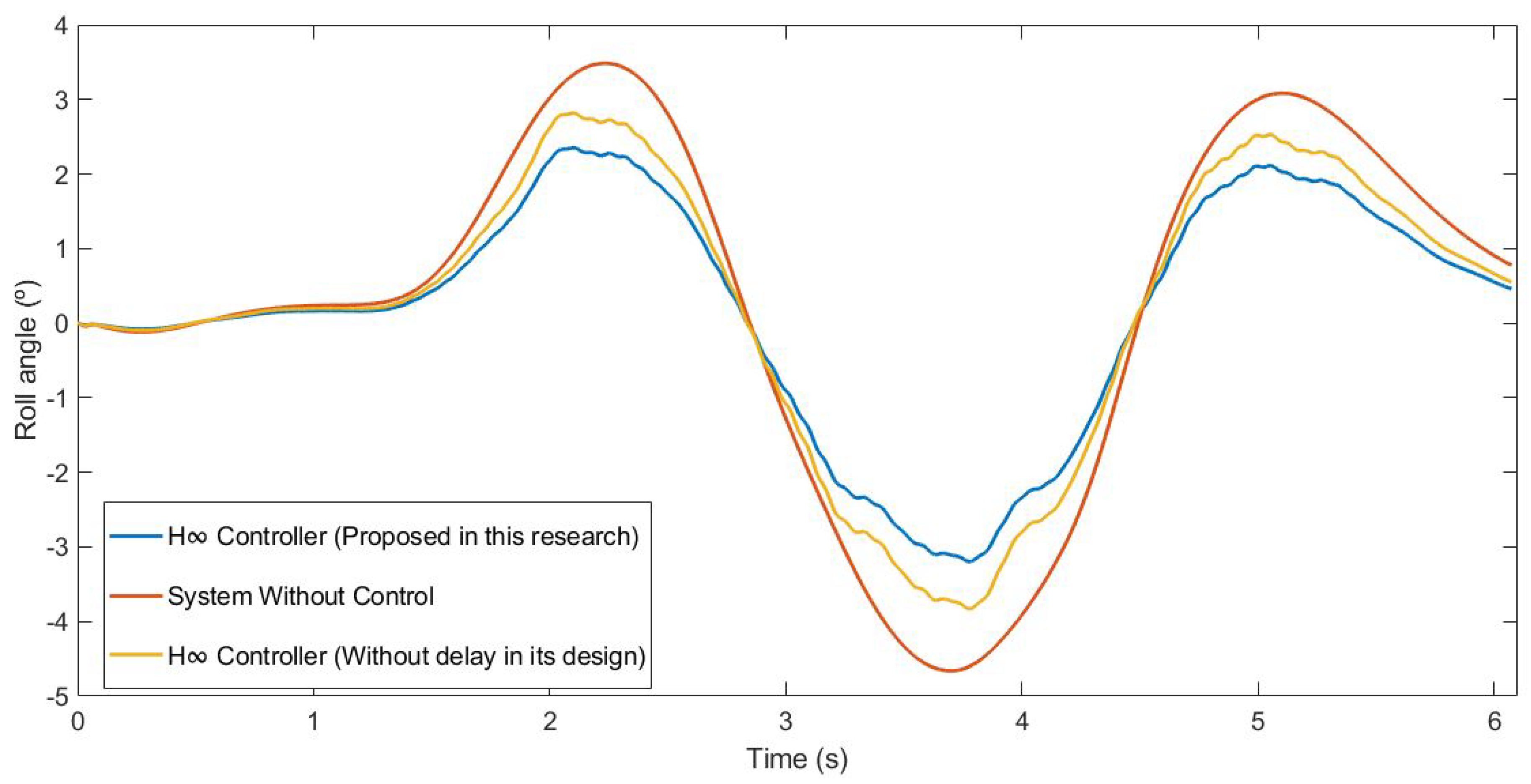
3.1.2. Test 2: Double Lane Change
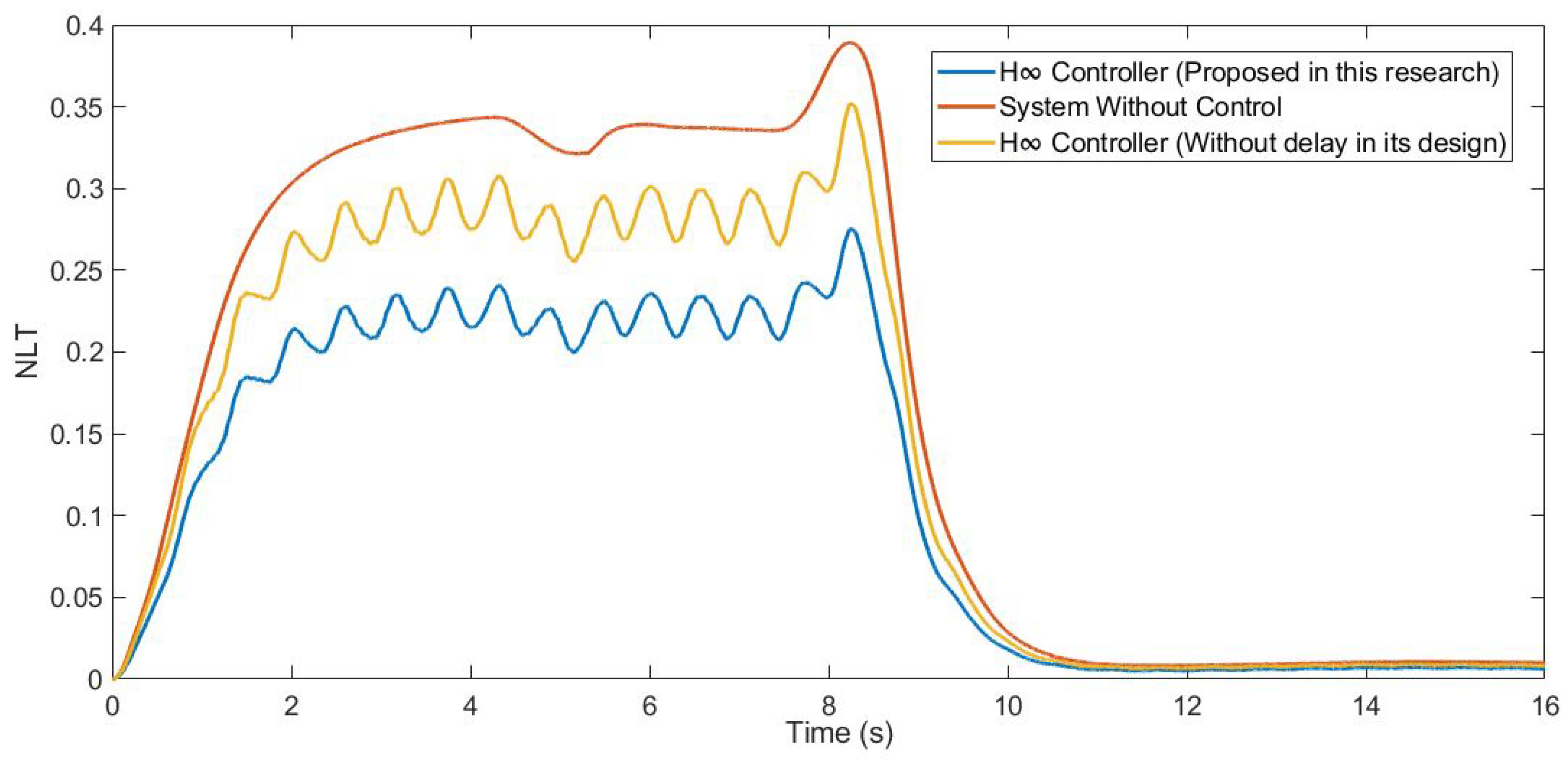
3.1.3. Test 3: Roundabout
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| LMI | Linear Matrix Inequality |
| RMS | Root Mean Square |
| RSC | Roll Stability Control |
| NCS | Networked Control Systems |
References
- Zhu, B.; Piao, Q.; Zhao, J.; Guo, L. Integrated chassis control for vehicle rollover prevention with neural network time-to-rollover warning metrics. Adv. Mech. Eng. 2016, 8, 1687814016632679. [Google Scholar] [CrossRef] [Green Version]
- Yim, S. Design of a robust controller for rollover prevention with active suspension and differential braking. J. Mech. Sci. Technol. 2012, 26, 213–222. [Google Scholar] [CrossRef]
- Riofrio, A.; Boada, M.J.L.; Boada, B.L.; García-Pozuelo, D. Fuzzy-Based Anti-Rollover Controller for a Heavy Duty Vehicle, using Active Suspension. In Proceedings of the FIS ITA 2016 World Automotive Congress, BEXCO, Busan, Korea, 26–30 September 2016. [Google Scholar]
- Riofrio, A.; Sanz, S.; Boada, M.J.L.; Boada, B.L. A LQR-Based Controller with Estimation of Road Bank for Improving Vehicle Lateral and Rollover Stability via Active Suspension. Sensors 2017, 17, 2318. [Google Scholar] [CrossRef] [Green Version]
- Yoon, J.; Cho, W.; Yi, K.; Koo, B. Unified Chassis Control for Vehicle Rollover Prevention. IFAC Proc. 2008, 41, 5682–5687. [Google Scholar] [CrossRef]
- Yoon, J.; Cho, W.; Koo, B.; Yi, K. Unified Chassis Control for Rollover Prevention and Lateral Stability. IEEE Trans. Veh. Technol. 2009, 58, 596–609. [Google Scholar] [CrossRef]
- Rodríguez Licea, M.A.; Cervantes, I. Robust Switched Predictive Braking Control for Rollover Prevention in Wheeled Vehicles. Math. Probl. Eng. 2014, 2014, 356250. [Google Scholar] [CrossRef] [Green Version]
- Jaiwat, P.; Ohtsuka, T. Stabilization of vehicle rollover by nonlinear model predictive control. In Proceedings of the The SICE Annual Conference 2013, Nagoya, Japan, 14–17 September 2013. [Google Scholar]
- Chu, D.; Lu, X.Y.; Wu, C.; Hu, Z.; Zhong, M. Smooth Sliding Mode Control for Vehicle Rollover Prevention Using Active Antiroll Suspension. Math. Probl. Eng. 2015, 2015, 478071. [Google Scholar] [CrossRef] [Green Version]
- Hermans, T.; Ramaekers, P.; Denil, J.; Meulenaere, P.D.; Anthonis, J. Incorporation of AUTOSAR in an Embedded Systems Development Process: A Case Study. In Proceedings of the 2011 37th EUROMICRO Conference on Software Engineering and Advanced Applications, Oulu, Finland, 30 August–2 September 2011; pp. 247–250. [Google Scholar] [CrossRef]
- Sangiovanni-Vincentelli, A.; Di Natale, M. Embedded System Design for Automotive Applications. Computer 2007, 40, 42–51. [Google Scholar] [CrossRef]
- Chakraborty, S.; Lukasiewycz, M.; Buckl, C.; Fahmy, S.; Chang, N.; Park, S.; Kim, Y.; Leteinturier, P.; Adlkofer, H. Embedded systems and software challenges in electric vehicles. In Proceedings of the Design, Automation Test in Europe Conference Exhibition, Dresden, Germany, 12–16 March 2012; pp. 242–429. [Google Scholar] [CrossRef] [Green Version]
- Guo, J.; Luo, Y.; Li, K.; Dai, Y. Coordinated path-following and direct yaw-moment control of autonomous electric vehicles with sideslip angle estimation. Mech. Syst. Signal Proc. 2018, 105, 183–199. [Google Scholar] [CrossRef]
- Strano, S.; Terzo, M. Vehicle sideslip angle estimation via a Riccati equation based nonlinear filter. Meccanica 2017, 52, 3513–3529. [Google Scholar] [CrossRef]
- Zhang, C.; Chen, Q.; Qiu, J. Robust H∞ filtering for vehicle sideslip angle estimation with sampled-data measurements. Trans. Inst. Meas. Control 2017, 39, 1059–1070. [Google Scholar] [CrossRef]
- Boada, B.L.; Boada, M.J.L.; Vargas-Melendez, L.; Diaz, V. A robust observer based on H∞ filtering with parameter uncertainties combined with Neural Networks for estimation of vehicle roll angle. Mech. Syst. Signal Proc. 2018, 99, 611–623. [Google Scholar] [CrossRef] [Green Version]
- Pajares Redondo, J.; Prieto González, L.; García Guzman, J.; Boada, B.L.; Díaz, V. VEHIOT: Design and Evaluation of an IoT Architecture Based on Low-Cost Devices to Be Embedded in Production Vehicles. Sensors 2018, 18, 486. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pajares Redondo, J.; Prieto González, L.; Montalvo Martinez, M.M.; García Guzman, J.; Sanz, S.; Boada, M.J.L.; Boada, B.L. VEHIOT: Evaluation of Smartphones as Data Acquisition Systems to Reduce Risk Situations in Commercial Vehicles. In Proceedings of the 2018 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Madrid, Spain, 12–14 September 2018. [Google Scholar] [CrossRef] [Green Version]
- García Guzman, J.; Prieto González, L.; Pajares Redondo, J.; Sanz, S.; Boada, B.L. Design of Low-Cost Vehicle Roll Angle Estimator Based on Kalman Filters and an IoT Architecture. Sensors 2018, 18, 1800. [Google Scholar] [CrossRef] [Green Version]
- García Guzman, J.; Prieto González, L.; Pajares Redondo, J.; Montalvo Martinez, M.M.; Boada, M.J.L. Real-Time Vehicle Roll Angle Estimation Based on Neural Networks in IoT Low-Cost Devices. Sensors 2018, 18, 2188. [Google Scholar] [CrossRef] [Green Version]
- Farivar, F.; Sayad Haghighi, M.; Jolfaei, A.; Wen, S. On the Security of Networked Control Systems in Smart Vehicle and Its Adaptive Cruise Control. IEEE Trans. Intell. Transp. Syst. 2021, 22, 3824–3831. [Google Scholar] [CrossRef]
- Lyu, W.; Cheng, X. A Novel Adaptive H∞ Filtering Method with Delay Compensation for the Transfer Alignment of Strapdown Inertial Navigation System. Sensors 2017, 17, 2753. [Google Scholar] [CrossRef] [Green Version]
- Boada, M.J.L.; Boada, B.L.; Zhang, H. Event-triggering H∞-based observer combined with NN for simultaneous estimation of vehicle sideslip and roll angles with network-induced delays. IEEE Trans. Control Syst. Technol. 2021, 29, 140–149. [Google Scholar] [CrossRef]
- Shariati, A.; Taghirad, H.D.; Labibi, B. Delay-Dependent H∞ Control of Linear Systems with Uncertain Input Delay Using State-Derivative Feedback. Sensors 2012, 14, 22–30. [Google Scholar]
- Jin, X.; Yin, G.; Li, Y.; Li, J. Stabilizing Vehicle Lateral Dynamics with Considerations of State Delay of AFS for Electric Vehicles via Robust Gain-Scheduling Control. Asian J. Control 2016, 18, 89–97. [Google Scholar] [CrossRef]
- Browne, F.; Rees, B.; Chiu, G.T.C.; Jain, N. Iterative Learning Control With Time-Delay Compensation: An Application to Twin-Roll Strip Casting. IEEE Trans. Control Syst. Technol. 2020, 29, 140–149. [Google Scholar] [CrossRef]
- Vargas-Melendez, L.; Boada, B.L.; Boada, M.J.L.; Gauchia, A.; Diaz, V. Sensor Fusion Based on an Integrated Neural Network and Probability Density Function (PDF) Dual Kalman Filter for On-Line Estimation of Vehicle Parameters and States. Sensors 2017, 17, 987. [Google Scholar] [CrossRef] [PubMed]
- Chokor, A.; Talj, R.; Charara, A.; Doumiati, M.; Rabhi, A. Rollover Prevention Using Active Suspension System. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017. [Google Scholar]
- Vargas-Melendez, L.; Boada, B.L.; Boada, M.J.L.; Gauchia, A.; Diaz, V. A Sensor Fusion Method Based on an Integrated Neural Network and Kalman Filter for Vehicle Roll Angle Estimation. Sensors 2016, 16, 1400. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, Y.; Yang, K.; He, X.; Ji, X. Active Steering and Anti-Roll Shared Control for Enhancing Roll Stability in Path Following of Autonomous Heavy Vehicle. In Proceedings of the WCX SAE World Congress Experience, Detroit, MI, USA, 9–11 April 2019. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Value |
|---|---|---|
| Roll moment of inertia | 500 kg m | |
| Sprung mass | 1700 kg | |
| Sprung mass height about the roll axis | 0.35 m | |
| Total torsional damping | 3538.08 N m/rad | |
| Stiffness coefficient | 18,438.02 N/m | |
| Distance from the Gravity Center to the front axle | 1.51 m | |
| Distance from the Gravity Center to the rear axle | 1.99 m | |
| l | Wheelbase | 3.5 m |
| Half vehicle track, front axle | 0.819 m | |
| Half vehicle track, rear axle | 0.819 m |
| RMS Error (°) | Maximum Error (°) | |
|---|---|---|
| H Controller (Proposed in this research) | 2.05 | 3.44 |
| System Without Control | 3.14 | 4.91 |
| H Controller (Without delay in its design) | 2.60 | 4.35 |
| Normalized Load Transfer Front Axle | Normalized Load Transfer Rear Axle | |
|---|---|---|
| H Controller (Proposed in this research) | 0.25 | 0.24 |
| System Without Control | 0.36 | 0.34 |
| H Controller (Without delay in its design) | 0.32 | 0.31 |
| RMS Error (°) | Maximum Error (°) | |
|---|---|---|
| H Controller (Proposed in this research) | 1.56 | 2.35 |
| System Without Control | 2.36 | 3.48 |
| H Controller (Without delay in its design) | 1.87 | 2.81 |
| Normalized Load Transfer Front Axle | Normalized Load Transfer Rear Axle | |
|---|---|---|
| H Controller (Proposed in this research) | 0.19 | 0.18 |
| System Without Control | 0.29 | 0.27 |
| H Controller (Without delay in its design) | 0.23 | 0.22 |
| RMS Error (°) | Maximum Error (°) | |
|---|---|---|
| H Controller (Proposed in this research) | 1.75 | 4.53 |
| System Without Control | 4.72 (rollover) | 9.81 (rollover) |
| H Controller (Without delay in its design) | 2.14 | 5.52 |
| Normalized Load Transfer Front Axle | Normalized Load Transfer Rear Axle | |
|---|---|---|
| H Controller (Proposed in this research) | 0.38 | 0.37 |
| System Without Control | 1 | 0.94 |
| H Controller (Without delay in its design) | 0.47 | 0.46 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Redondo, J.P.; Boada, B.L.; Díaz, V. LMI-Based H∞ Controller of Vehicle Roll Stability Control Systems with Input and Output Delays. Sensors 2021, 21, 7850. https://doi.org/10.3390/s21237850
Redondo JP, Boada BL, Díaz V. LMI-Based H∞ Controller of Vehicle Roll Stability Control Systems with Input and Output Delays. Sensors. 2021; 21(23):7850. https://doi.org/10.3390/s21237850
Chicago/Turabian StyleRedondo, Jonatan Pajares, Beatriz L. Boada, and Vicente Díaz. 2021. "LMI-Based H∞ Controller of Vehicle Roll Stability Control Systems with Input and Output Delays" Sensors 21, no. 23: 7850. https://doi.org/10.3390/s21237850
APA StyleRedondo, J. P., Boada, B. L., & Díaz, V. (2021). LMI-Based H∞ Controller of Vehicle Roll Stability Control Systems with Input and Output Delays. Sensors, 21(23), 7850. https://doi.org/10.3390/s21237850