
Human Behavior Recognition Model Based on Feature and Classifier Selection

 , ,
, , 
Abstract
:1. Introduction
2. Related Work
3. Classification Framework
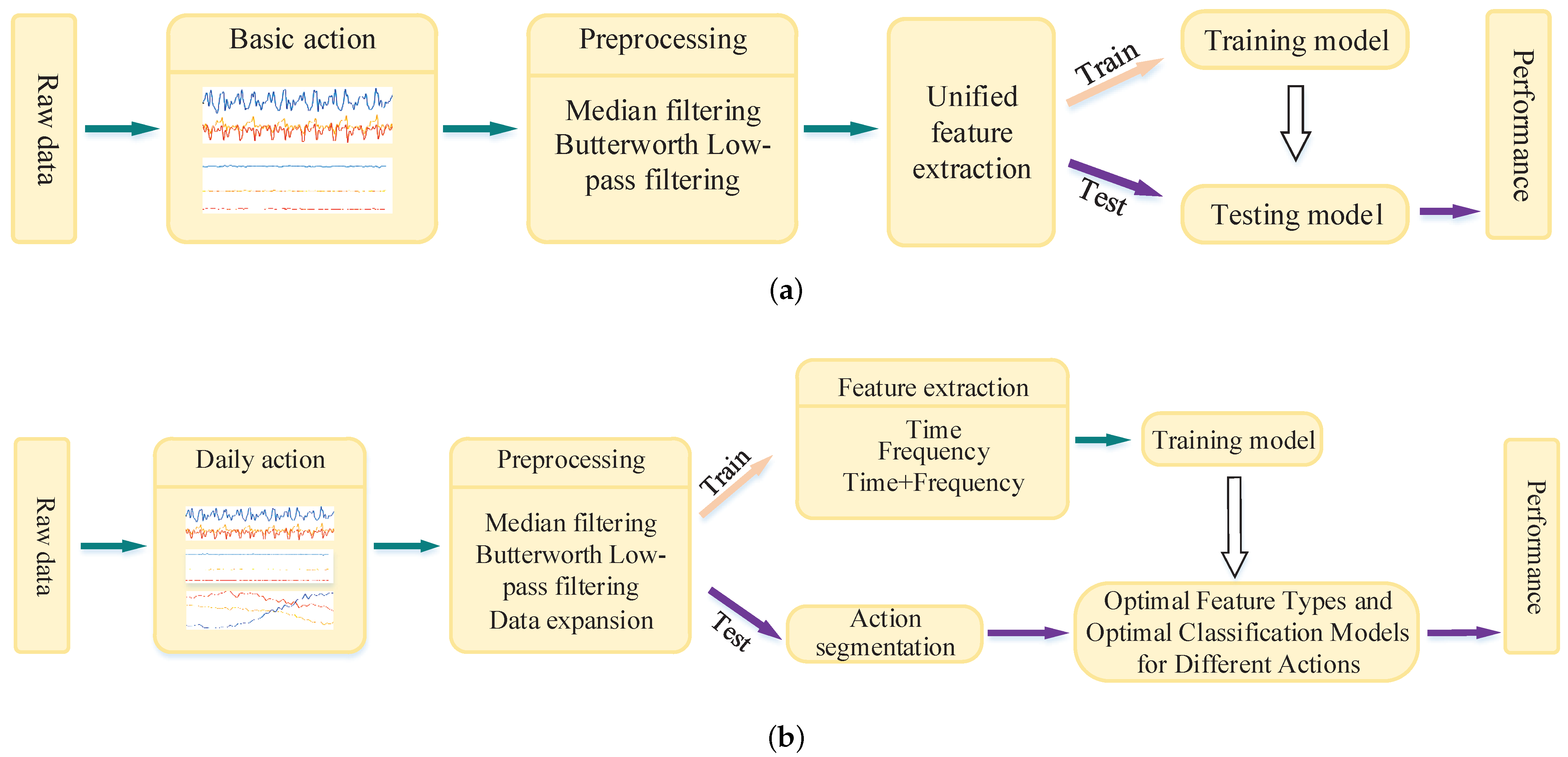
3.1. Multi-Feature and Multi-Classifier Action Recognition Model
3.2. Data Preprocessing
3.3. Feature Extraction and Model Training
3.3.1. Feature Extraction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | |
|---|---|
| Time | Max, Min, Range, Mean, Standard deviation |
| Frequency [47] | Center of gravity frequency, Mean square frequency, Root mean square frequency, Frequency variance, Frequency standard deviation, Mean value, Standard deviation, Median, Peak |
3.3.2. Classifier
4. Experimental Results and Analyses
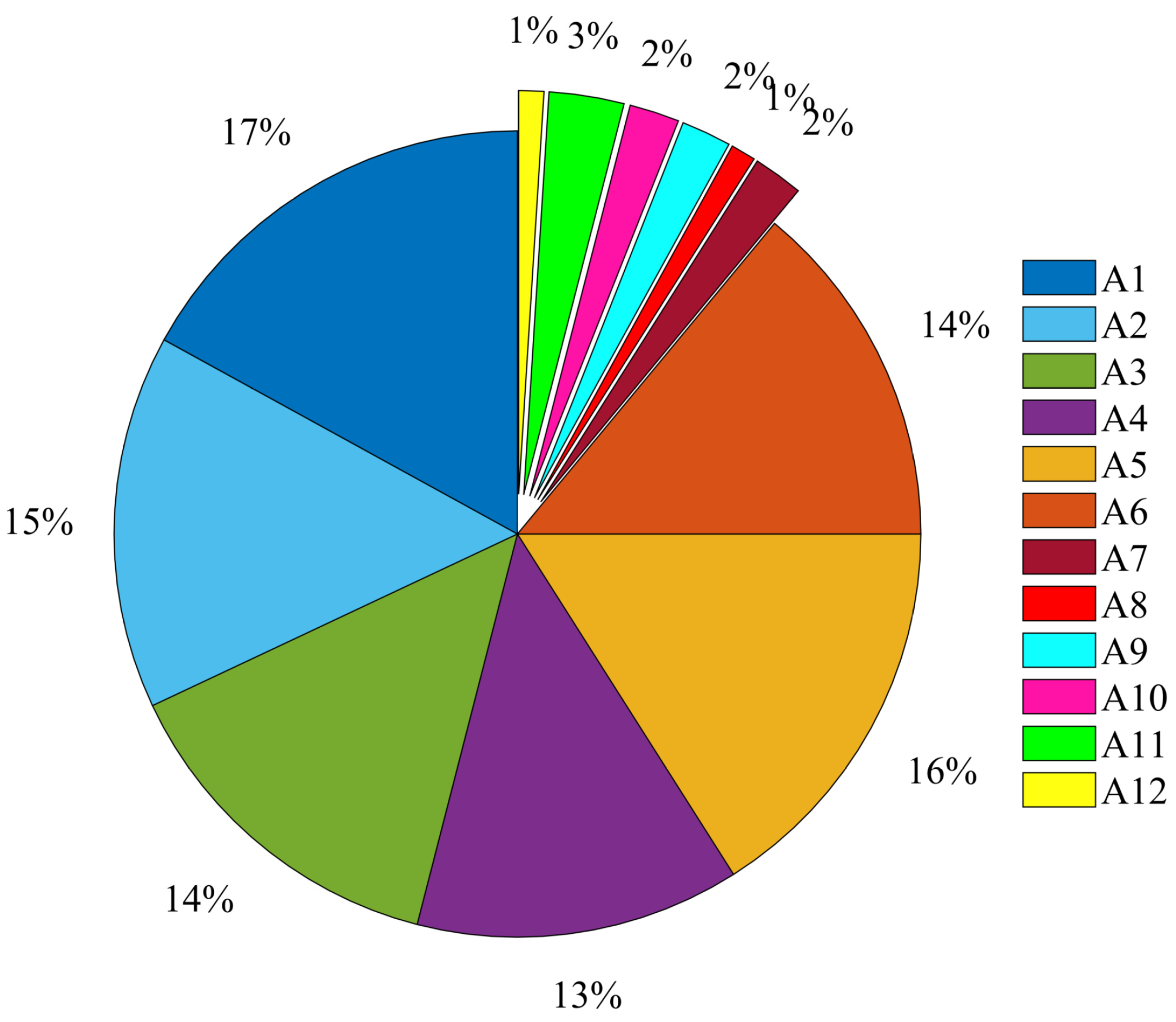
4.1. Data Description
4.2. Experimental Setup and Performance Measurement Criteria
4.3. Comparison of Experimental Results
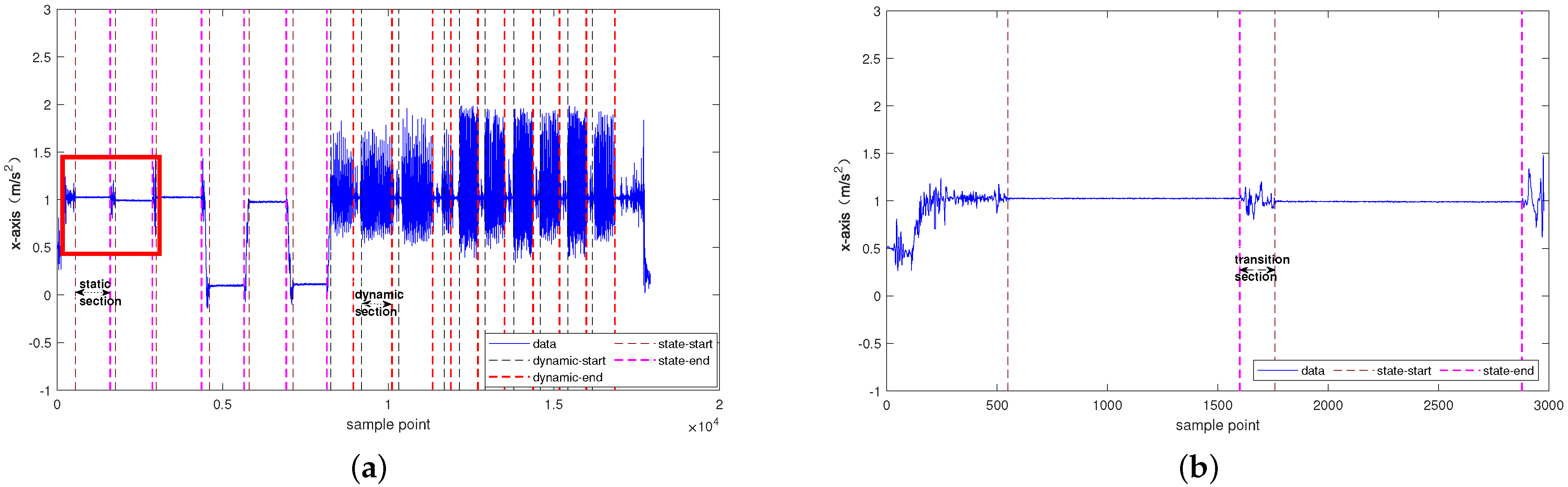
4.3.1. Division of Basic Movements
Reasons for Basic Action Division
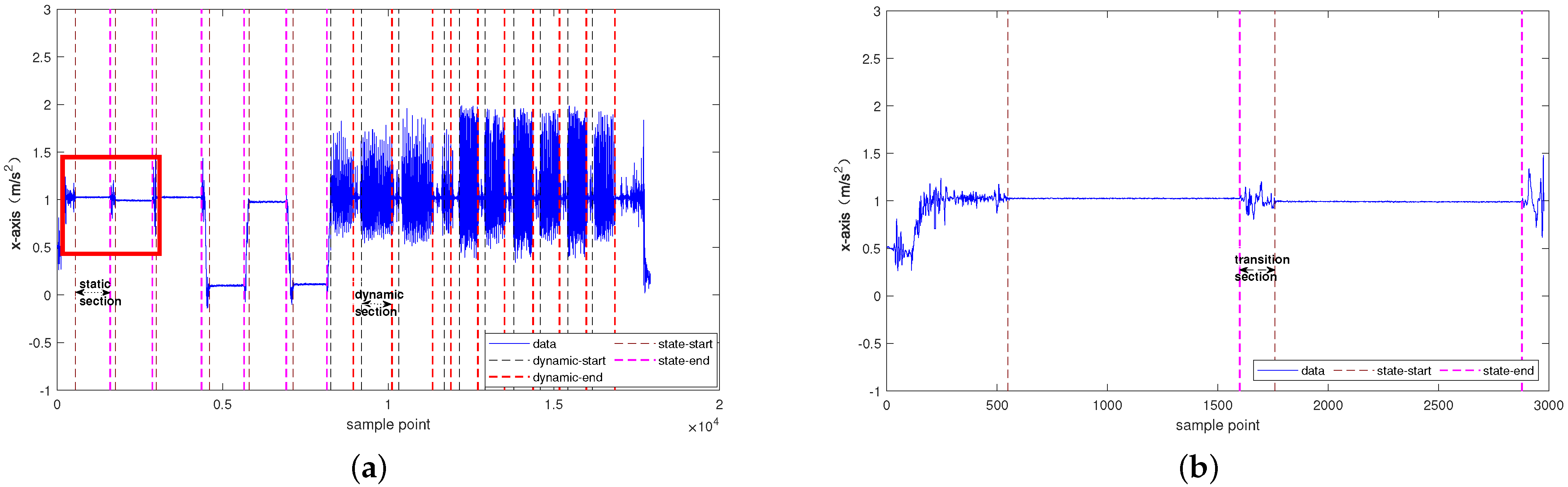
Basic Action Segmentation Method
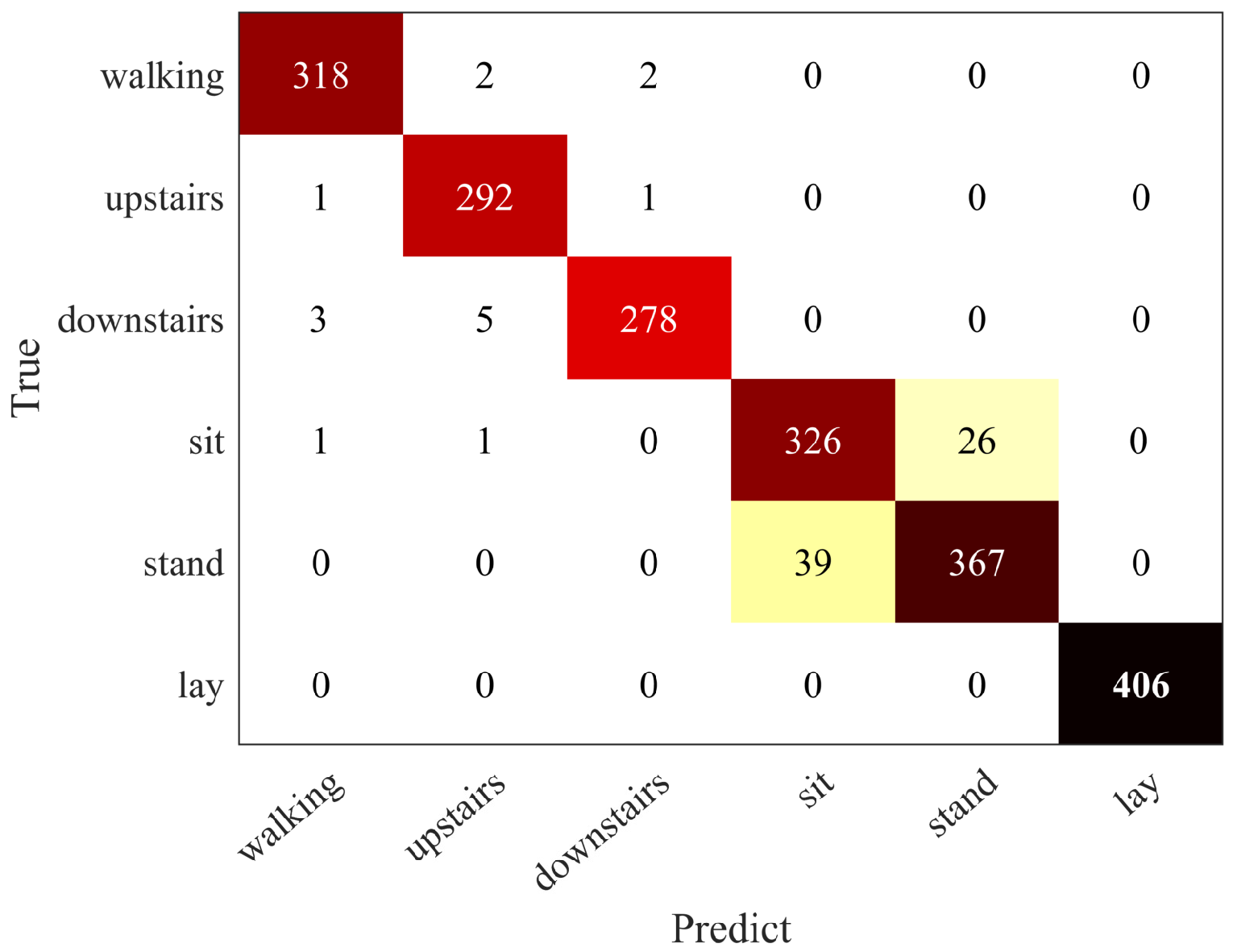
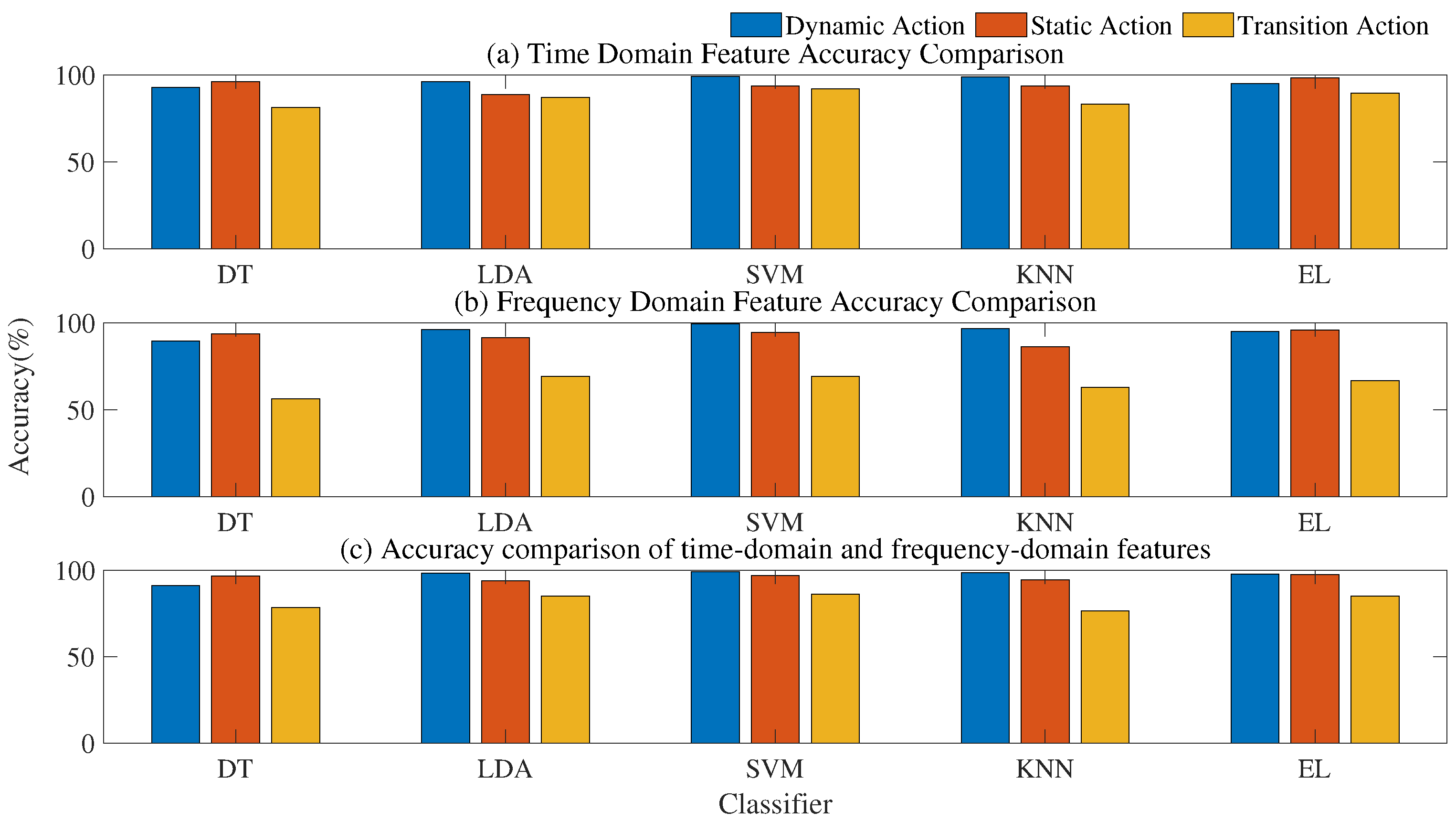
4.3.2. Performance of Subdivision Action on Different Classifiers
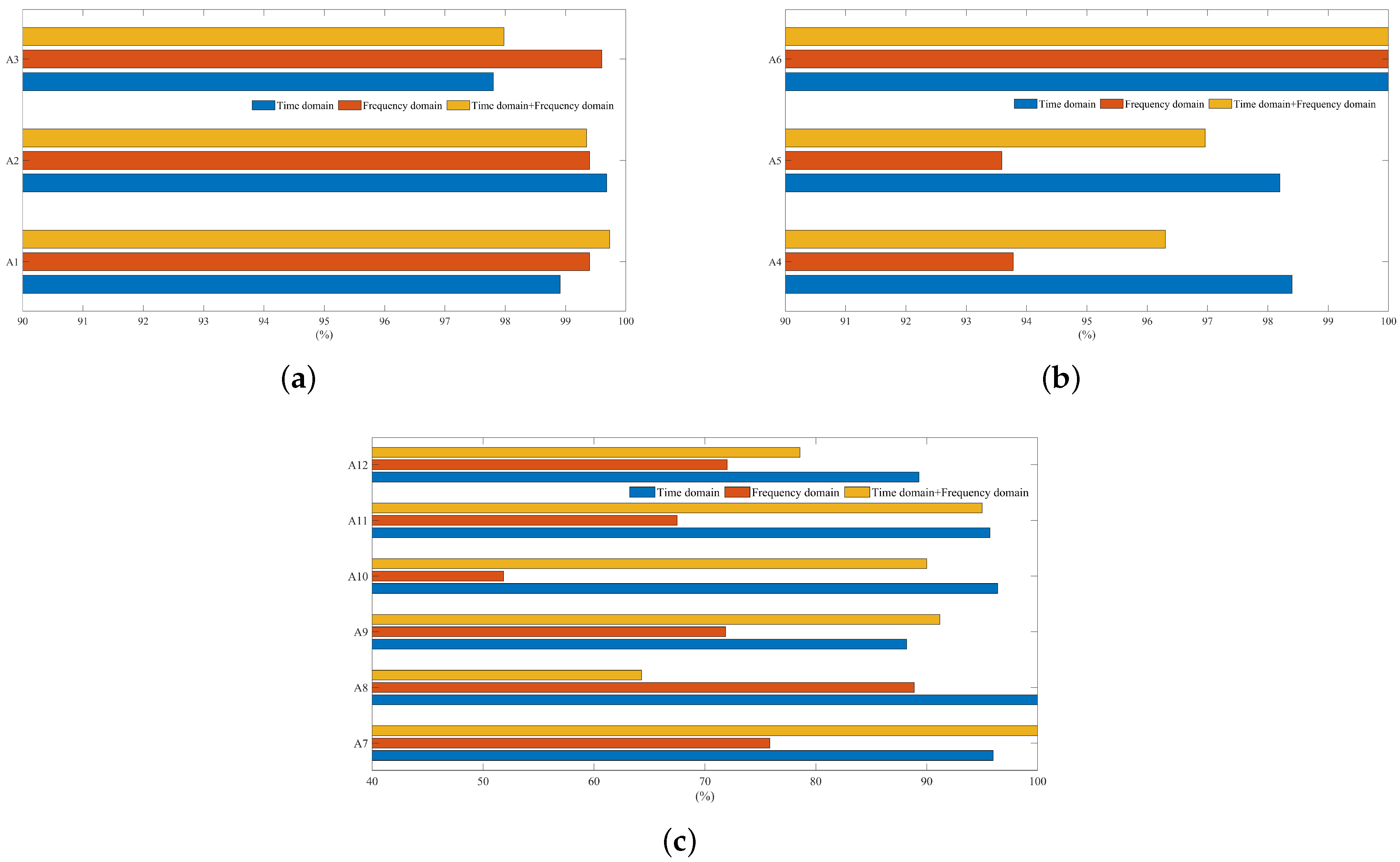
4.3.3. Feature Evaluation of Single Action Based on Optimal Classifier
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Syed, A.S.; Sierra-Sosa, D.; Kumar, A.; Elmaghraby, A.S. A Hierarchical Approach to Activity Recognition and Fall Detection Using Wavelets and Adaptive Pooling. Sensors 2021, 21, 6653. [Google Scholar] [CrossRef]
- Wang, Y.; Cang, S.; Yu, H. A Data Fusion-Based Hybrid Sensory System for Older People’s Daily Activity and Daily Routine Recognition. IEEE Sens. J. 2018, 18, 6874–6888. [Google Scholar] [CrossRef]
- Tsinganos, P.; Skodras, A. On the Comparison of Wearable Sensor Data Fusion to a Single Sensor Machine Learning Technique in Fall Detection. Sensors 2018, 18, 592. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- González, S.; Sedano, J.; Villar, J.; Corchado, E.; Herrero, Á.; Bar-uque, B. Features and models for human activity recognition. Neurocomputing 2015, 167, 52–60. [Google Scholar] [CrossRef] [Green Version]
- Xi, X.; Tang, M.; Miran, S.; Luo, Z. Evaluation of Feature Extraction and Recognition for Activity Monitoring and Fall Detection Based on Wearable sEMG Sensors. Sensors 2017, 17, 1229. [Google Scholar] [CrossRef] [PubMed]
- Mehran, R.; Oyama, A.; Shah, M. Abnormal crowd behavior detection using social force model. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009. [Google Scholar]
- Bhuiyan, M.S.H.; Patwary, N.S.; Saha, P.K.; Hossain, M.T. Sensor-based human activity recognition: A comparative study of machine learning techniques. In Proceedings of the 2020 2nd International Conference on Advanced Information and Communication Technology (ICAICT), Dhaka, Bangladesh, 28–29 November 2020; pp. 286–290. [Google Scholar]
- Lima, W.S.; Souto, E.; El-Khatib, K.; Jalali, R.; Gama, J. Human Activity Recognition Using Inertial Sensors in a Smartphone: An Overview. Sensors 2019, 19, 3213. [Google Scholar] [CrossRef] [Green Version]
- Salvati, L.; d’Amore, M.; Fiorentino, A.; Pellegrino, A.; Sena, P.; Villecco, F. On-Road Detection of Driver Fatigue and Drowsiness during Medium-Distance Journeys. Entropy 2021, 23, 135. [Google Scholar] [CrossRef] [PubMed]
- Ke, S.R.; Hoang, L.; Lee, Y.J.; Hwang, J.N.; Yoo, J.H.; Choi, K.H. A Review on Video-Based Human Activity Recognition. Computers 2013, 2, 88–131. [Google Scholar] [CrossRef]
- Chen, Y.; Shen, C. Performance Analysis of Smartphone-Sensor Behavior for Human Activity Recognition. IEEE Access 2017, 5, 3095–3110. [Google Scholar] [CrossRef]
- Demrozi, F.; Pravadelli, G.; Bihorac, A.; Rashidi, P. Human Activity Recognition Using Inertial, Physiological and Environmental Sensors: A Comprehensive Survey. IEEE Access 2020, 8, 210816–210836. [Google Scholar] [CrossRef]
- Xia, C.; Sugiura, Y. Optimizing Sensor Position with Virtual Sensors in Human Activity Recognition System Design. Sensors 2021, 21, 6893. [Google Scholar] [CrossRef] [PubMed]
- Nasiri, S.; Khosravani, M.R. Progress and challenges in fabrication of wearable sensors for health monitoring. Sens. Actuators A-Phys. 2020, 312, 112105. [Google Scholar] [CrossRef]
- Saif, S.; Saha, R.; Biswas, S. On Development of MySignals based prototype for application in health vitals monitoring. Wirel. Pers. Commun. 2021. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Koohpayehzadeh, J.; Ghafour, M.Y.; Ahmed, A.M.; Asghari, P.; Souri, A.; Pourasghari, H.; Rezapour, A. An elderly health monitoring system based on biological and behavioral indicators in internet of things. J. Ambient. Intell. Humaniz. Comput. 2020, 1–11. [Google Scholar] [CrossRef]
- Attaoui, A.E.; Hazmi, M.; Jilbab, A.; Bourouhou, A. Wearable Wireless Sensors Network for ECG Telemonitoring Using Neural Network for Features Extraction. Wirel. Pers. Commun. 2020, 111, 1955–1976. [Google Scholar] [CrossRef]
- Sun, R.; Sosnoff, J. Novel sensing technology in fall risk assessment in older adults: A systematic review. BMC Geriatr. 2018, 18, 14. [Google Scholar] [CrossRef] [Green Version]
- Bet, P.; Castro, P.C.; Ponti, M. Fall detection and fall risk assessment in older person using wearable sensors: A systematic review. Int. J. Med. Inform. 2019, 130, 103946. [Google Scholar] [CrossRef]
- Torres-Huitzil, C.; Nuño-Maganda, M. Robust smartphone-based human activity recognition using a tri-axial accelerometer. In Proceedings of the 2015 IEEE 6th Latin American Symposium on Circuits & Systems (LASCAS), Montevideo, Uruguay, 24–27 February 2015; pp. 1–4. [Google Scholar]
- Attal, F.; Mohammed, S.; Dedabrishvili, M.; Chamroukhi, F.; Oukhellou, L.; Amirat, Y. Physical Human Activity Recognition Using Wearable Sensors. Sensors 2015, 15, 31314–31338. [Google Scholar] [CrossRef] [Green Version]
- Preece, S.; Goulermas, J.Y.; Kenney, L.; Howard, D.; Meijer, K.; Crompton, R. Activity identification using body-mounted sensors–a review of classification techniques. Physiol. Meas. 2009, 30, R1–R33. [Google Scholar] [CrossRef]
- Wang, X.; Wang, X.; Lv, T.; Jin, L.; He, M. HARNAS: Human Activity Recognition Based on Automatic Neural Architecture Search Using Evolutionary Algorithms. Sensors 2021, 21, 6927. [Google Scholar] [CrossRef]
- Jiang, S.; Lv, B.; Guo, W.; Zhang, C.; Wang, H.; Sheng, X.; Shull, P.B. Feasibility of Wrist-Worn, Real-Time Hand, and Surface Gesture Recognition via sEMG and IMU Sensing. IEEE Trans. Ind. Inform. 2018, 14, 3376–3385. [Google Scholar] [CrossRef]
- Lu, J.; Tong, K. Robust Single Accelerometer-Based Activity Recognition Using Modified Recurrence Plot. IEEE Sens. J. 2019, 19, 6317–6324. [Google Scholar] [CrossRef]
- Hsu, Y.L.; Yang, S.C.; Chang, H.C.; Lai, H.C. Human Daily and Sport Activity Recognition Using a Wearable Inertial Sensor Network. IEEE Access 2018, 6, 31715–31728. [Google Scholar] [CrossRef]
- Wang, J.; Chen, Y.; Hao, S.; Peng, X.; Hu, L. Deep Learning for Sensor-based Activity Recognition: A Survey. Pattern Recognit. Lett. 2019, 119, 3–11. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y. Human Activity Recognition Based on the Hierarchical Feature Selection and Classification Framework. J. Electr. Comput. Eng. 2015, 2015, 140820:1–140820:9. [Google Scholar] [CrossRef] [Green Version]
- Gómez, A.; Sáez, Y.; Viñuela, P.I. Evolutionary Design of Convolutional Neural Networks for Human Activity Recognition in Sensor-Rich Environments. Sensors 2018, 18, 1288. [Google Scholar]
- Li, F.; Shirahama, K.; Nisar, M.; Köping, L.; Grzegorzek, M. Comparison of Feature Learning Methods for Human Activity Recognition Using Wearable Sensors. Sensors 2018, 18, 679. [Google Scholar] [CrossRef] [Green Version]
- Bhuiyan, R.; Ahmed, N.; Amiruzzaman, M.; Islam, M.R. A Robust Feature Extraction Model for Human Activity Characterization Using 3-Axis Accelerometer and Gyroscope Data. Sensors 2020, 20, 6990. [Google Scholar] [CrossRef] [PubMed]
- Minarno, A.E.; Kusuma, W.A.; Wibowo, H.; Akbi, D.R.; Jawas, N. Single triaxial accelerometer-gyroscope classification for human activity recognition. In Proceedings of the 2020 8th International Conference on Information and Communication Technology (ICoICT), Yogyakarta, Indonesia, 24–26 June 2020; pp. 1–5. [Google Scholar]
- Leonardis, G.D.; Rosati, S.; Balestra, G.; Agostini, V.; Panero, E.; Gastaldi, L.; Knaflitz, M. Human activity recognition by wearable sensors: Comparison of different classifiers for real-time applications. In Proceedings of the 2018 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Rome, Italy, 11–13 June 2018; pp. 1–6. [Google Scholar]
- Rosati, S.; Balestra, G.; Molinari, F. Feature Extraction by QuickReduct Algorithm: Assessment of Migraineurs Neurovascular Pattern. J. Med. Imaging Health Inform. 2011, 1, 184–192. [Google Scholar] [CrossRef]
- Rosati, S.; Meiburger, K.; Balestra, G.; Acharya, U.; Molinari, F. Carotid wall measurement and assessment based on pixel-based and local texture descriptors. J. Mech. Med. Biol. 2016, 16, 1640006. [Google Scholar] [CrossRef]
- Li, J.; Cheng, K.; Wang, S.; Morstatter, F.; Trevino, R.P.; Tang, J.; Liu, H. Feature Selection: A Data Perspective. ACM Comput. Surv. 2016, 50, 1–45. [Google Scholar] [CrossRef] [Green Version]
- Rojas-Domínguez, A.; Padierna, L.C.; Valadez, J.M.C.; Puga-Soberanes, H.J.; Fraire, H. Optimal Hyper-Parameter Tuning of SVM Classifiers With Application to Medical Diagnosis. IEEE Access 2018, 6, 7164–7176. [Google Scholar] [CrossRef]
- San-Segundo-Hernández, R.; Blunck, H.; Moreno-Pimentel, J.; Stisen, A.; Gil-Martín, M. Robust Human Activity Recognition using smartwatches and smartphones. Eng. Appl. Artif. Intell. 2018, 72, 190–202. [Google Scholar] [CrossRef]
- Yang, F.; Zhang, L. Real-time human activity classification by accelerometer embedded wearable devices. In Proceedings of the 2017 4th International Conference on Systems and Informatics (ICSAI), Hangzhou, China, 11–13 November 2017; pp. 469–473. [Google Scholar]
- Wang, A.; Chen, G.; Wu, X.; Liu, L.; An, N.; Chang, C.Y. Towards Human Activity Recognition: A Hierarchical Feature Selection Framework. Sensors 2018, 18, 3629. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhu, J.; San-Segundo-Hernández, R.; Pardo, J. Feature extraction for robust physical activity recognition. Hum.-Centric Comput. Inf. Sci. 2017, 7, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Huynh-The, T.; Hua, C.H.; Tu, N.A.; Hur, T.; Bang, J.; Kim, D.; Amin, M.B.; Kang, B.; Seung, H.; Shin, S.Y.; et al. Hierarchical topic modeling with pose-transition feature for action recognition using 3D skeleton data. Inf. Sci. 2018, 444, 20–35. [Google Scholar] [CrossRef]
- Geng, H.; Huan, Z.; Liang, J.; Hou, Z.; Gao, G.; Lv, S. Motion state transition recognition model for complex actions. J. Chin. Comput. Syst. 2021, 42, 2323–2330. [Google Scholar]
- Shoaib, M.; Bosch, S.; Incel, Ö.D.; Scholten, H.; Havinga, P. Fusion of Smartphone Motion Sensors for Physical Activity Recognition. Sensors 2014, 14, 10146–10176. [Google Scholar] [CrossRef]
- Twomey, N.; Diethe, T.; Fafoutis, X.; Elsts, A.; McConville, R.; Flach, P.A.; Craddock, I. A Comprehensive Study of Activity Recognition Using Accelerometers. Informatics 2018, 5, 27. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.Y. Combination approach of SMOTE and biased-SVM for imbalanced datasets. In Proceedings of the 2008 IEEE International Joint Conference on Neural Networks (IEEE World Congress on Computational Intelligence), Hong Kong, China, 1–8 June 2008; pp. 228–231. [Google Scholar]
- Zhao, Z.; Ye, G.L.; Liu, Y.; Zhang, Z.Y. Recognition of Fault State of RV Reducer Based on self-organizing feature map Neural Network. J. Phys. Conf. Ser. 2021, 1986, 012086. [Google Scholar] [CrossRef]
- Sagi, O.; Rokach, L. Explainable decision forest: Transforming a decision forest into an interpretable tree. Inf. Fusion 2020, 61, 124–138. [Google Scholar] [CrossRef]
- Zhou, B.; Wang, H.; Hu, F.; Feng, N.; Xi, H.; Zhang, Z.; Tang, H. Accurate recognition of lower limb ambulation mode based on surface electromyography and motion data using machine learning. Comput. Methods Program Biomed. 2020, 193, 105486. [Google Scholar] [CrossRef] [PubMed]
- Ishwaran, H.; Lu, M. Standard errors and confidence intervals for variable importance in random forest regression, classification, and survival. Stat. Med. 2019, 384, 558–582. [Google Scholar] [CrossRef]
- Anguita, D.; Ghio, A.; Oneto, L.; Parra, X.; Reyes-Ortiz, J.L. A Public Domain Dataset for Human Activity Recognition using Smartphones. Esann 2013, 3, 3. [Google Scholar]
- Huan, Z.; Chen, X.; Lv, S.; Geng, H. Gait Recognition of Acceleration Sensor for Smart Phone Based on Multiple Classifier Fusion. Math. Probl. Eng. 2019, 2019, 1–17. [Google Scholar] [CrossRef]
- Qi, W.; Su, H.; Yang, C.; Ferrigno, G.; Momi, E.; Aliverti, A. A Fast and Robust Deep Convolutional Neural Networks for Complex Human Activity Recognition Using Smartphone. Sensors 2019, 19, 3731. [Google Scholar] [CrossRef] [Green Version]
- Noor, M.H.M.; Salcic, Z.; Wang, K.I.K. Adaptive sliding window segmentation for physical activity recognition using a single tri-axial accelerometer. Pervasive Mob. Comput. 2017, 38, 41–59. [Google Scholar] [CrossRef]


| Traditional Classification | Actions | Actions Description | Our Classification |
|---|---|---|---|
| Basic action | A1 | Walking | Dynamic action |
| A2 | Walking Upstairs | ||
| A3 | Walking Downstairs | ||
| A4 | Siting | Static action | |
| A5 | Standing | ||
| A6 | Laying | ||
| Transitional action | A7 | Stand-to-Sit | Transitional action |
| A8 | Sit-to-Stand | ||
| A9 | Sit-to-Lie | ||
| A10 | Lie-to-Sit | ||
| A11 | Stand-to-Lie | ||
| A12 | Lie-to-Stand |
| Reference | Classifier | Accuracy | Activities | Subject | Sensors | Features |
|---|---|---|---|---|---|---|
| Literature [53] | DCNN | 94.18% | Sit, Stand, Lie, Walk, Walking Upstairs, Walking Downstairs | 20 | Three-axis accelerometer, gyroscope and magnetometer | 248 |
| FRDCNN | 95.27% | |||||
| Literature [32] | DT | 93.44% | Sit, Stand, Lie, Walk, Walking Upstairs, Walking Downstairs | 30 | There-axis accelerometer and gyroscope | 561 |
| RF | 96.73% | |||||
| KNN | 96.21% | |||||
| LR | 98.40% | |||||
| SVM | 93.86% | |||||
| ECLF | 97.60% | |||||
| method3 | DT | 93% | Sit, Stand, Lie, Walk, Walking Upstairs, Walking Downstairs | 30 | There-axis accelerometer and gyroscope | 126 |
| RF | 96.13% | |||||
| KNN | 90% | |||||
| LR | 82% | |||||
| SVM | 96.60% | |||||
| ECLF | 97.18% |
| Action | Precision | Recall | F1-Score |
|---|---|---|---|
| A1 | 99.70% | 98.24% | 98.96% |
| A2 | 98.79% | 99.69% | 99.24% |
| A3 | 98.34% | 98.67% | 98.50% |
| A4 | 91.81% | 91.04% | 91.42% |
| A5 | 91.04% | 92.07% | 91.55% |
| A6 | 100% | 100% | 100% |
| Precision (%) | A1 | A2 | A3 | A4 | A5 | A6 | A7 | A8 | A9 | A10 | A11 | A12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| AW-TD [54] | 99.7 | × | × | 98.1 | 97.4 | × | 68.5 | 58.7 | 90.6 | 86.6 | × | × |
| Literature [43] | 99.0 | 100 | 96.6 | 98.6 | 98.8 | 99.3 | 100 | 100 | 89.6 | 100 | 77.9 | 100 |
| Our method | 99.7 | 100 | 100 | 98.1 | 98.6 | 100 | 96 | 100 | 90.9 | 92.6 | 90.0 | 96.2 |
| Recall (%) | A1 | A2 | A3 | A4 | A5 | A6 | A7 | A8 | A9 | A10 | A11 | A12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| AW-TD [54] | 96.3 | × | × | 90.6 | 99.2 | × | 89.2 | 86.0 | 92.9 | 89.2 | × | × |
| Literature [43] | 100 | 95.6 | 99.7 | 99.8 | 98.7 | 98.1 | 94.7 | 79.1 | 100 | 87.1 | 100 | 93.1 |
| Our method | 99.4 | 99.4 | 99.6 | 98.4 | 98.2 | 100 | 96 | 100 | 88.2 | 96.4 | 95.7 | 89.3 |
| Action | Best Features | Best Classifier |
|---|---|---|
| Dynamic action | Frequency-domain | SVM |
| Static action | Time-domain | EL |
| Transition action | Time-domain | SVM |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, G.; Li, Z.; Huan, Z.; Chen, Y.; Liang, J.; Zhou, B.; Dong, C. Human Behavior Recognition Model Based on Feature and Classifier Selection. Sensors 2021, 21, 7791. https://doi.org/10.3390/s21237791
Gao G, Li Z, Huan Z, Chen Y, Liang J, Zhou B, Dong C. Human Behavior Recognition Model Based on Feature and Classifier Selection. Sensors. 2021; 21(23):7791. https://doi.org/10.3390/s21237791
Chicago/Turabian StyleGao, Ge, Zhixin Li, Zhan Huan, Ying Chen, Jiuzhen Liang, Bangwen Zhou, and Chenhui Dong. 2021. "Human Behavior Recognition Model Based on Feature and Classifier Selection" Sensors 21, no. 23: 7791. https://doi.org/10.3390/s21237791
APA StyleGao, G., Li, Z., Huan, Z., Chen, Y., Liang, J., Zhou, B., & Dong, C. (2021). Human Behavior Recognition Model Based on Feature and Classifier Selection. Sensors, 21(23), 7791. https://doi.org/10.3390/s21237791