
Visual SLAM-Based Robotic Mapping Method for Planetary Construction


 and
and
Abstract
:1. Introduction
2. Literature Review
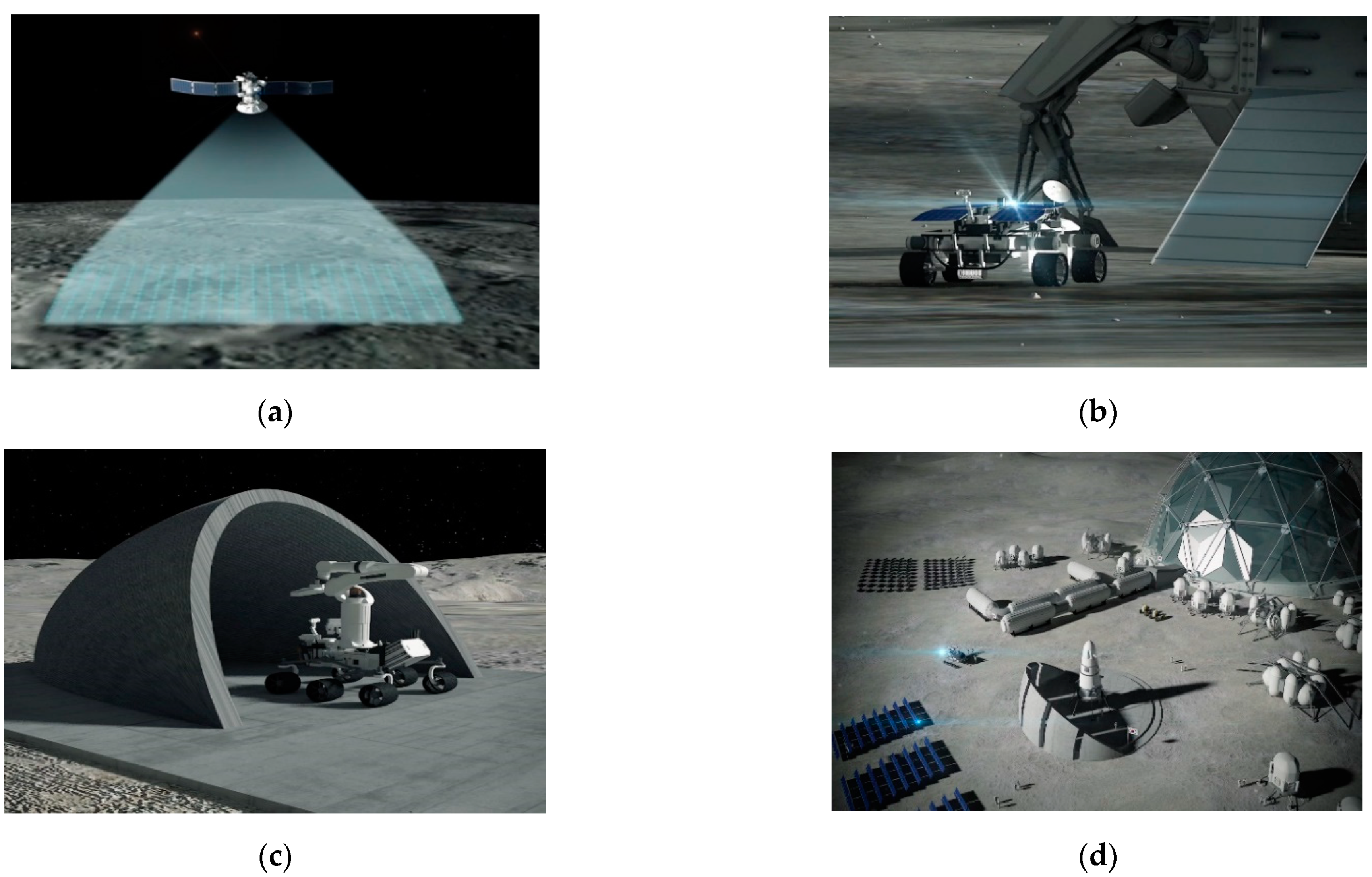
2.1. Planetary Construction
2.2. Planetary SLAM
3. Proposed Method
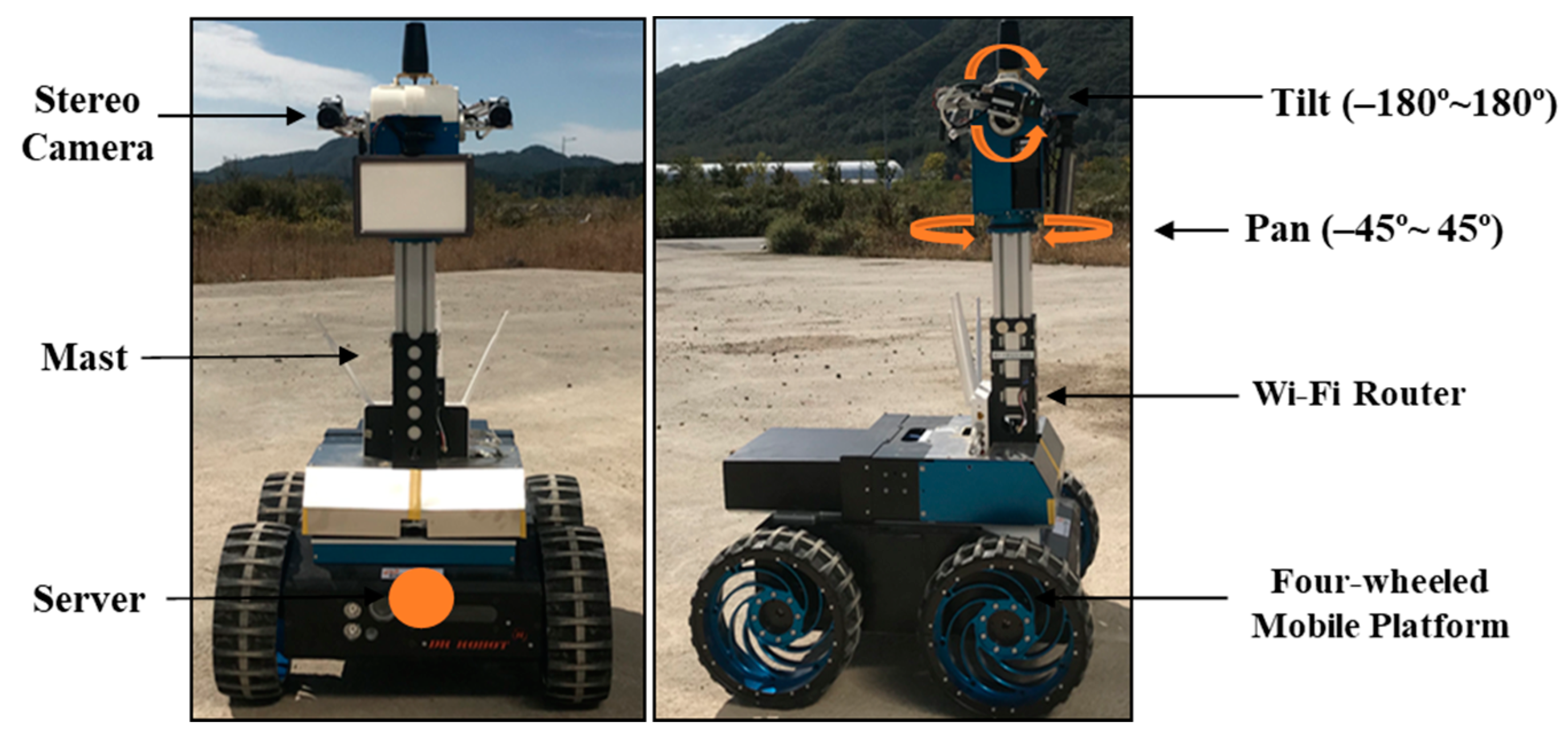
3.1. System Architecture
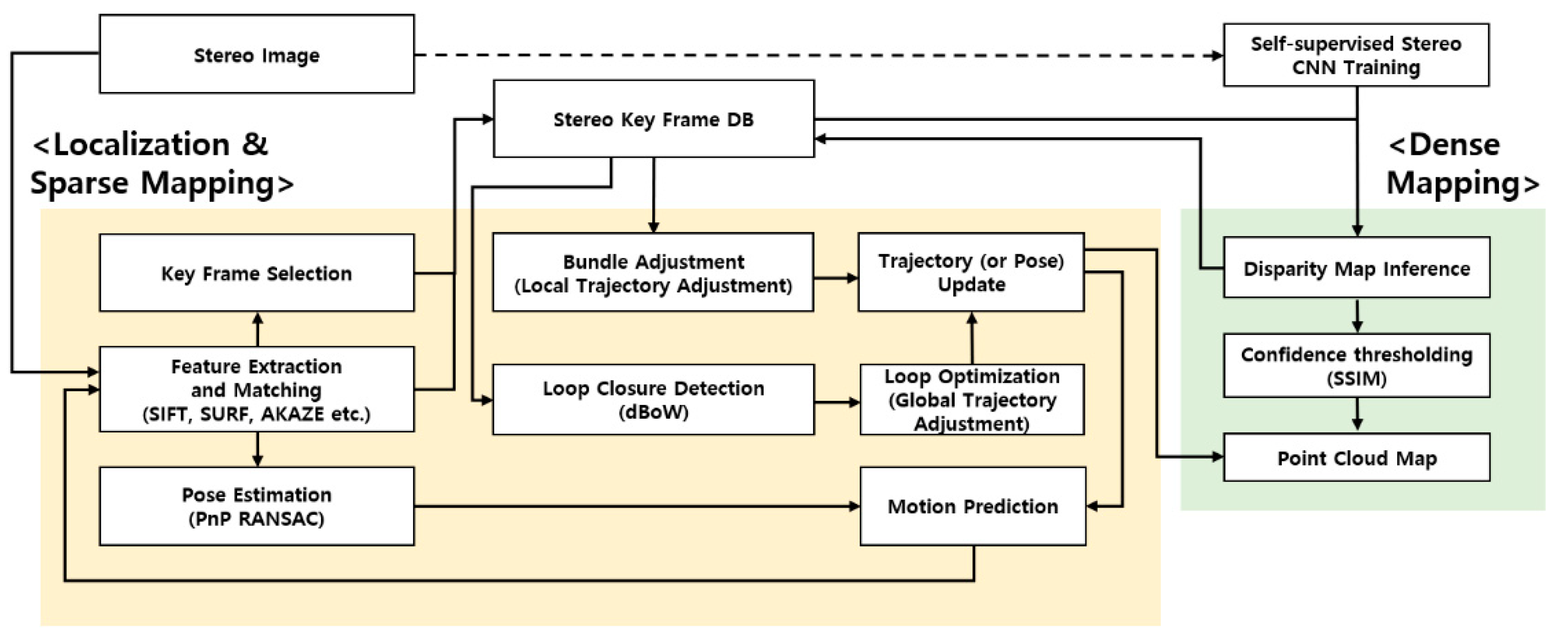
3.2. Stereo SLAM-Based 3D Mapping Method
3.2.1. Disparity Map Prediction
3.2.2. Disparity Map for 3D Mapping
3.2.3. Disparity Map for Localization
4. Experiments and Results
4.1. Overview
4.2. Parameter Setting in the Proposed Method
4.2.1. Dense Disparity Estimation
4.2.2. Disparity-Map-Aided Feature Matching
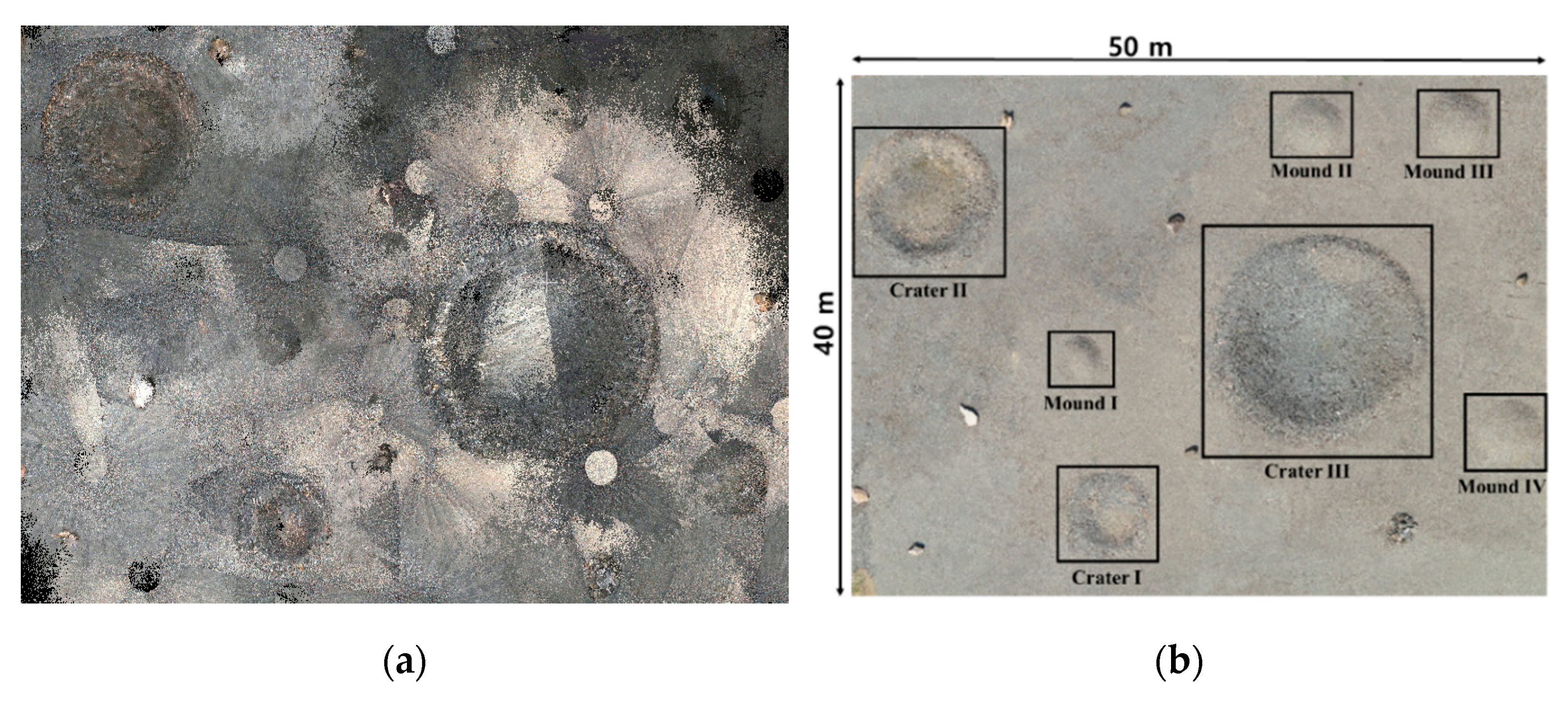
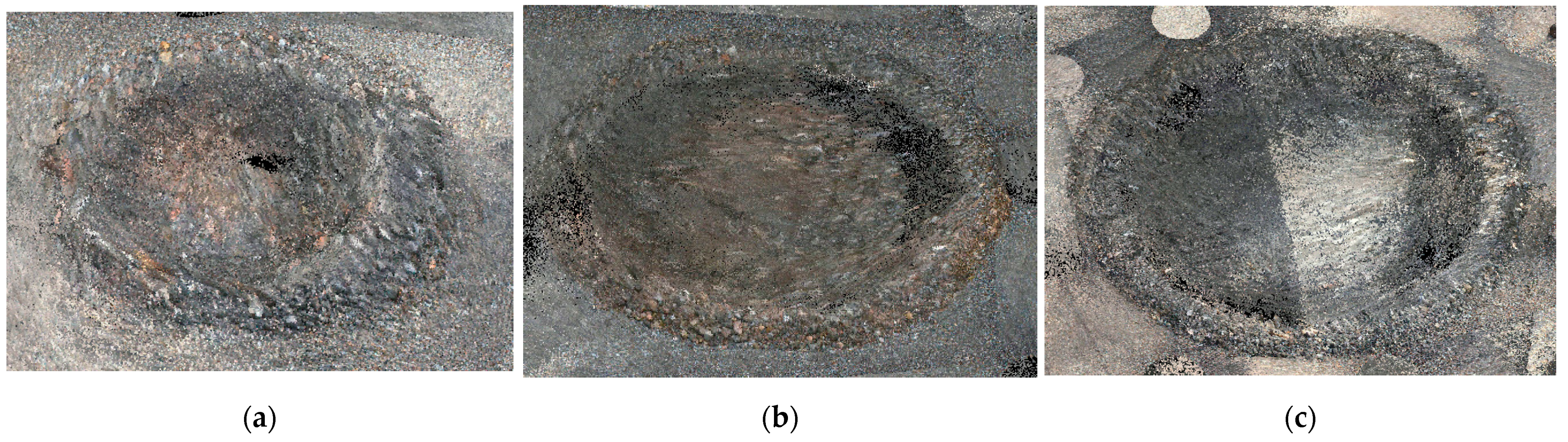
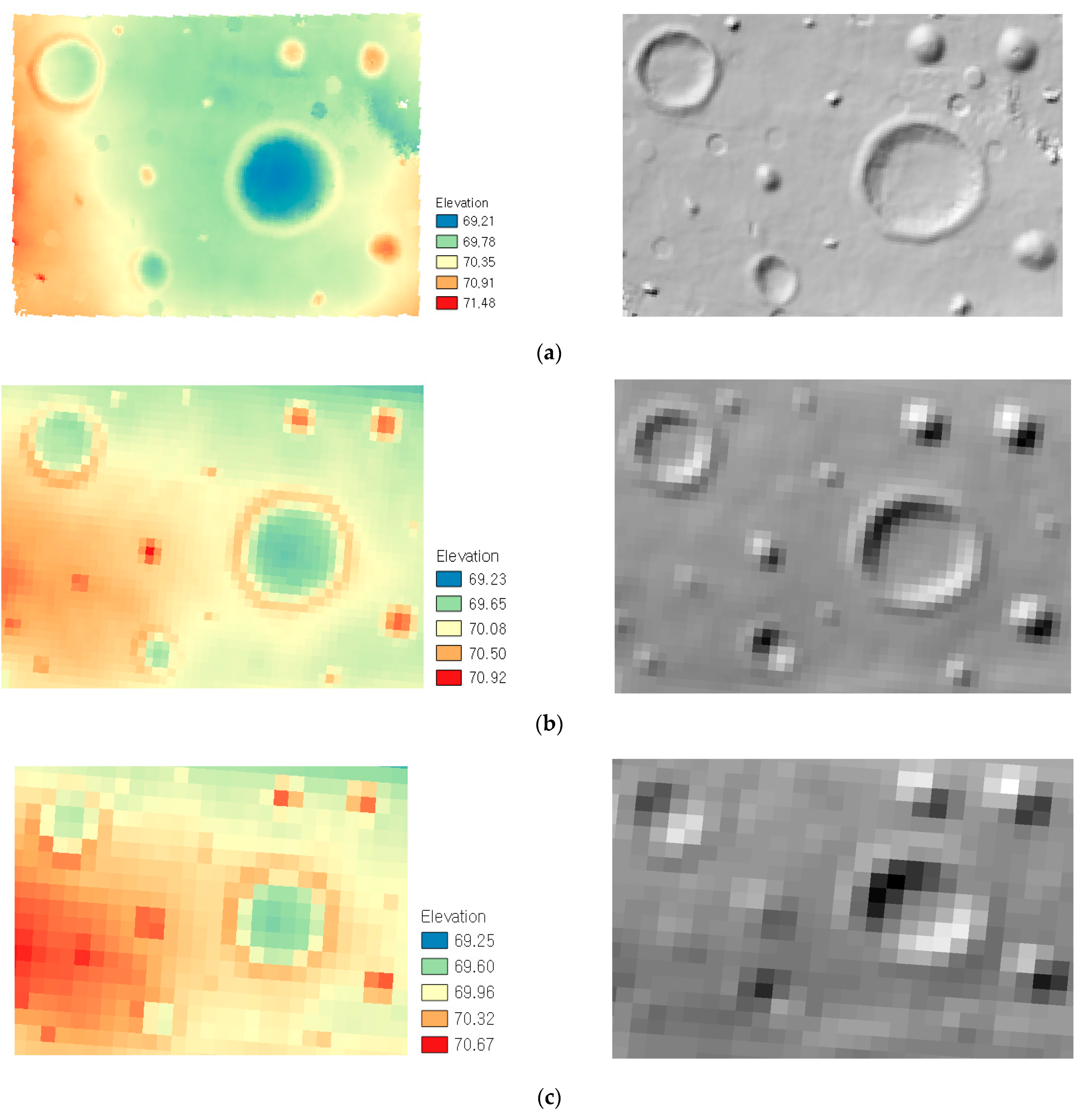
4.3. Terrain-Mapping Results
5. Summary and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Arya, A.; Rajasekhar, R.; Thangjam, G.; Ajai; Kumar, A.K. Detection of potential site for future human habitability on the Moon using Chandrayaan-1 data. Curr. Sci. 2011, 100, 524–529. [Google Scholar]
- Spudis, P.; Bussey, D.; Baloga, S.; Cahill, J.; Glaze, L.; Patterson, G.; Raney, R.; Thompson, T.; Thomson, B.; Ustinov, E. Evidence for water ice on the Moon: Results for anomalous polar craters from the LRO Mini-RF imaging radar. J. Geophys. Res. Planets 2013, 118, 2016–2029. [Google Scholar] [CrossRef]
- Ralphs, M.; Franz, B.; Baker, T.; Howe, S. Water extraction on Mars for an expanding human colony. Life Sci. Space Res. 2015, 7, 57–60. [Google Scholar] [CrossRef]
- Thangavelautham, J.; Robinson, M.S.; Taits, A.; McKinney, T.; Amidan, S.; Polak, A. Flying, hopping Pit-Bots for cave and lava tube exploration on the Moon and Mars. arXiv 2017, arXiv:1701.07799. [Google Scholar]
- Anand, M.; Crawford, I.A.; Balat-Pichelin, M.; Abanades, S.; Van Westrenen, W.; Péraudeau, G.; Jaumann, R.; Seboldt, W. A brief review of chemical and mineralogical resources on the Moon and likely initial In Situ Resource Utilization (ISRU) applications. Planet. Space Sci. 2012, 74, 42–48. [Google Scholar] [CrossRef]
- Arney, D.C.; Jones, C.A.; Klovstad, J.; Komar, D.; Earle, K.; Moses, R.; Bushnell, D.; Shyface, H. Sustaining Human Presence on Mars Using ISRU and a Reusable Lander. In Proceedings of the AIAA Space 2015 Conference and Exposition, Pasadena, CA, USA, 31 August 2015; p. 4479. [Google Scholar]
- Naser, M. Extraterrestrial construction materials. Prog. Mater. Sci. 2019, 105, 100577. [Google Scholar] [CrossRef]
- Lee, W.-B.; Ju, G.-H.; Choi, G.-H.; Sim, E.-S. Development Trends of Space Robots. Curr. Ind. Technol. Trends Aerosp. 2011, 9, 158–175. [Google Scholar]
- Khoshnevis, B. Automated construction by contour crafting—related robotics and information technologies. Autom. Constr. 2004, 13, 5–19. [Google Scholar] [CrossRef]
- Khoshnevis, B.; Yuan, X.; Zahiri, B.; Zhang, J.; Xia, B. Construction by Contour Crafting using sulfur concrete with planetary applications. Rapid Prototyp. J. 2016, 22, 848–856. [Google Scholar] [CrossRef] [Green Version]
- Cesaretti, G.; Dini, E.; De Kestelier, X.; Colla, V.; Pambaguian, L. Building components for an outpost on the Lunar soil by means of a novel 3D printing technology. Acta Astronaut. 2014, 93, 430–450. [Google Scholar] [CrossRef]
- Roman, M.; Yashar, M.; Fiske, M.; Nazarian, S.; Adams, A.; Boyd, P.; Bentley, M.; Ballard, J. 3D-Printing Lunar and Martian Habitats and the Potential Applications for Additive Construction. In Proceedings of the International Conference on Environmental Systems, Lisbon, Portugal, 12–16 July 2020; pp. 1–10. [Google Scholar]
- Sanchez-Cuevas, P.J.; Ramon-Soria, P.; Arrue, B.; Ollero, A.; Heredia, G. Robotic system for inspection by contact of bridge beams using UAVs. Sensors 2019, 19, 305. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Loupos, K.; Doulamis, A.D.; Stentoumis, C.; Protopapadakis, E.; Makantasis, K.; Doulamis, N.D.; Amditis, A.; Chrobocinski, P.; Victores, J.; Montero, R. Autonomous robotic system for tunnel structural inspection and assessment. Int. J. Intell. Robot. Appl. 2018, 2, 43–66. [Google Scholar] [CrossRef]
- Ientile, S.; SCHMIDT, F.; Chevalier, C.; Orcesi, A.; Adelaide, L.; Nedjar, B. Road Network Analysis For Risk And Resilience Assessment Framework Of Road Infrastructure Systems. WIT Trans. Eng. Sci. 2020, 129, 197–206. [Google Scholar]
- Merali, R.S.; Tong, C.; Gammell, J.; Bakambu, J.; Dupuis, E.; Barfoot, T.D. 3D surface mapping using a semiautonomous rover: A planetary analog field experiment. In Proceedings of the 2012 International Symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS), Turin, Italy, 4–6 September 2012. [Google Scholar]
- Tong, C.H.; Barfoot, T.D.; Dupuis, É. Three-dimensional SLAM for mapping planetary work site environments. J. Field Robot. 2012, 29, 381–412. [Google Scholar] [CrossRef]
- Kuroda, Y.; Kurosawa, T.; Tsuchiya, A.; Shimoda, S.; Kubota, T. Position estimation scheme for lunar rover based on integration of the sun and the earth observation and dead reckoning. In Proceedings of the 7th International Symposium on Artificial Intelligence, Robotics and Automation in Space, i-SAIRAS, Nara, Japan, 19–23 May 2003. [Google Scholar]
- Schuster, M.J.; Brunner, S.G.; Bussmann, K.; Büttner, S.; Dömel, A.; Hellerer, M.; Lehner, H.; Lehner, P.; Porges, O.; Reill, J. Towards autonomous planetary exploration. J. Intell. Robot. Syst. 2019, 93, 461–494. [Google Scholar] [CrossRef] [Green Version]
- Xiao, L.; Zhu, P.; Fang, G.; Xiao, Z.; Zou, Y.; Zhao, J.; Zhao, N.; Yuan, Y.; Qiao, L.; Zhang, X. A young multilayered terrane of the northern Mare Imbrium revealed by Chang’E-3 mission. Science 2015, 347, 1226–1229. [Google Scholar] [CrossRef] [PubMed]
- Di, K.; Zhu, M.H.; Yue, Z.; Lin, Y.; Wan, W.; Liu, Z.; Gou, S.; Liu, B.; Peng, M.; Wang, Y. Topographic evolution of Von Kármán crater revealed by the lunar rover Yutu-2. Geophys. Res. Lett. 2019, 46, 12764–12770. [Google Scholar] [CrossRef]
- Kwan, C.; Chou, B.; Ayhan, B. Enhancing Stereo Image Formation and Depth Map Estimation for Mastcam Images. In Proceedings of the 2018 9th IEEE Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York, NY, USA, 8–10 November 2018; pp. 566–572. [Google Scholar]
- Maki, J.; Gruel, D.; McKinney, C.; Ravine, M.; Morales, M.; Lee, D.; Willson, R.; Copley-Woods, D.; Valvo, M.; Goodsall, T. The Mars 2020 Engineering Cameras and Microphone on the Perseverance Rover: A Next-Generation Imaging System for Mars Exploration. Space Sci. Rev. 2020, 216, 1–48. [Google Scholar] [CrossRef]
- International Space Exploration Cooperation Group (ISECG). Global Exploration Map Supplment; National Aeronautics and Space Administration Headquarters: Washington, DC, USA, 2020.
- Li, B.; Yue, Z.; Zhang, J.; Fu, X.; Ling, Z.; Chen, S.; Chen, J.; Yao, P. High-resolution terrain analysis for lander safety landing and rover path planning based on Lunar Reconnaissance Orbiter Narrow Angle Camera images: A case study of China’s Chang’e-4 probe. Earth Space Sci. 2019, 6, 398–410. [Google Scholar] [CrossRef]
- Jawin, E.R.; Valencia, S.N.; Watkins, R.N.; Crowell, J.M.; Neal, C.R.; Schmidt, G. Lunar science for landed missions workshop findings report. Earth Space Sci. 2019, 6, 2–40. [Google Scholar] [CrossRef] [Green Version]
- Pajola, M.; Rossato, S.; Baratti, E.; Kling, A. Planetary mapping for landing sites selection: The Mars case study. In Planetary Cartography and GIS; Springer: Berlin/Heidelberg, Germany, 2019; pp. 175–190. [Google Scholar]
- Mitrofanov, I.G.; Sanin, A.B.; Boynton, W.V.; Chin, G.; Garvin, J.; Golovin, D.; Evans, L.; Harshman, K.; Kozyrev, A.; Litvak, M. Hydrogen mapping of the lunar south pole using the LRO neutron detector experiment LEND. Science 2010, 330, 483–486. [Google Scholar] [CrossRef]
- Pieters, C.M.; Boardman, J.; Buratti, B.; Chatterjee, A.; Clark, R.; Glavich, T.; Green, R.; Head III, J.; Isaacson, P.; Malaret, E. The Moon mineralogy mapper (M3) on chandrayaan-1. Curr. Sci. 2009, 500–505. [Google Scholar] [CrossRef] [Green Version]
- Seelos, K.D.; Seelos, F.P.; Viviano-Beck, C.E.; Murchie, S.L.; Arvidson, R.E.; Ehlmann, B.L.; Fraeman, A.A. Mineralogy of the MSL Curiosity landing site in Gale crater as observed by MRO/CRISM. Geophys. Res. Lett. 2014, 41, 4880–4887. [Google Scholar] [CrossRef] [Green Version]
- Wilson, J.T.; Eke, V.R.; Massey, R.J.; Elphic, R.C.; Feldman, W.C.; Maurice, S.; Teodoro, L.F. Equatorial locations of water on Mars: Improved resolution maps based on Mars Odyssey Neutron Spectrometer data. Icarus 2018, 299, 148–160. [Google Scholar] [CrossRef] [Green Version]
- Bussey, B.; Hoffman, S.J. Human Mars landing site and impacts on Mars surface operations. In Proceedings of the 2016 IEEE Aerospace Conference, Big Sky, MT, USA, 21 January 2016; pp. 1–21. [Google Scholar]
- Sherwood, B. Principles for a practical Moon base. Acta Astronaut. 2019, 160, 116–124. [Google Scholar] [CrossRef]
- Green, R.D.; Kleinhenz, J.E. In-Situ Resource Utilization (ISRU) Living off the Land on the Moon and Mars. In Proceedings of the ACS National Meeting & Exposition, NASA Glenn Research Center, Cleveland, OH, USA, 22 May 2019. [Google Scholar]
- Sanders, G.B.; Larson, W.E. Final review of analog field campaigns for In Situ Resource Utilization technology and capability maturation. Adv. Space Res. 2015, 55, 2381–2404. [Google Scholar] [CrossRef]
- Sanders, G.B.; Larson, W.E. Integration of in-situ resource utilization into lunar/Mars exploration through field analogs. Adv. Space Res. 2011, 47, 20–29. [Google Scholar] [CrossRef]
- Gasser, M.; Chalmer Dunn, M. Moon and Mars habitation in lava tubes: The first explorers will be cave men again. Stefánshellir test site in Iceland. In Proceedings of the European Planetary Science Congress, Berlin, Germany, 16–21 September 2018. ID: EPSC2018–2322. [Google Scholar]
- Tseng, K.-K.; Li, J.; Chang, Y.; Yung, K.; Chan, C.; Hsu, C.-Y. A new architecture for simultaneous localization and mapping: An application of a planetary rover. Enterp. Inf. Syst. 2019, 15, 1–17. [Google Scholar] [CrossRef]
- Bajpai, A.; Burroughes, G.; Shaukat, A.; Gao, Y. Planetary monocular simultaneous localization and mapping. J. Field Robot. 2016, 33, 229–242. [Google Scholar] [CrossRef]
- Peng, M.; Wan, W.; Xing, Y.; Wang, Y.; Liu, Z.; Di, K.; Zhao, Q.; Teng, B.; Mao, X. Integrating Depth And Image Sequences For Planetary Rover Mapping Using Rgb-D Sensor. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 1369–1374. [Google Scholar] [CrossRef] [Green Version]
- Di, K.; Zhao, Q.; Wan, W.; Wang, Y.; Gao, Y. RGB-D SLAM based on extended bundle adjustment with 2D and 3D information. Sensors 2016, 16, 1285. [Google Scholar] [CrossRef] [Green Version]
- Shaukat, A.; Blacker, P.C.; Spiteri, C.; Gao, Y. Towards camera-LIDAR fusion-based terrain modelling for planetary surfaces: Review and analysis. Sensors 2016, 16, 1952. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hidalgo-Carrió, J.; Poulakis, P.; Kirchner, F. Adaptive localization and mapping with application to planetary rovers. J. Field Robot. 2018, 35, 961–987. [Google Scholar] [CrossRef]
- Pire, T.; Fischer, T.; Castro, G.; De Cristóforis, P.; Civera, J.; Berlles, J.J. S-PTAM: Stereo parallel tracking and mapping. Robot. Auton. Syst. 2017, 93, 27–42. [Google Scholar] [CrossRef] [Green Version]
- Gálvez-López, D.; Tardos, J.D. Bags of binary words for fast place recognition in image sequences. IEEE Trans. Robot. 2012, 28, 1188–1197. [Google Scholar] [CrossRef]
- Mayer, N.; Ilg, E.; Hausser, P.; Fischer, P.; Cremers, D.; Dosovitskiy, A.; Brox, T. A large dataset to train convolutional networks for disparity, optical flow, and scene flow estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, San Juan, PR, USA, 17–19 June 1997; pp. 4040–4048. [Google Scholar]
- Kendall, A.; Martirosyan, H.; Dasgupta, S.; Henry, P.; Kennedy, R.; Bachrach, A.; Bry, A. End-to-end learning of geometry and context for deep stereo regression. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 66–75. [Google Scholar]
- Chang, J.-R.; Chen, Y.-S. Pyramid stereo matching network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 5410–5418. [Google Scholar]
- Zhang, F.; Prisacariu, V.; Yang, R.; Torr, P.H. Ga-net: Guided aggregation net for end-to-end stereo matching. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019; pp. 185–194. [Google Scholar]
- Hirschmuller, H. Stereo processing by semiglobal matching and mutual information. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 30, 328–341. [Google Scholar] [CrossRef]
- Geiger, A.; Lenz, P.; Urtasun, R. Are we ready for autonomous driving. In Proceedings of the CVPR, Providence, RI, USA, 16–21 June 2012; pp. 3354–3361. [Google Scholar]
- Menze, M.; Geiger, A. Object scene flow for autonomous vehicles. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3061–3070. [Google Scholar]
- Zhong, Y.; Dai, Y.; Li, H. Self-supervised learning for stereo matching with self-improving ability. arXiv 2017, arXiv:1709.00930. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Alcantarilla, P.F.; Solutions, T. Fast explicit diffusion for accelerated features in nonlinear scale spaces. IEEE Trans. Patt. Anal. Mach. Intell 2011, 34, 1281–1298. [Google Scholar]
- Hong, S.; Shin, H.-S. Comparative Performance Analysis of Feature Detection and Matching Methods for Lunar Terrain Images. J. Korean Soc. Civ. Eng. 2020, 40, 437–444. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Thresholds | Number of Feature Detected | Matching Constraint | ||
|---|---|---|---|---|
| 0.001 | 337 | 2 | 133 | 58 |
| 0.0001 | 1758 | 9 | 589 | 329 |
| 0.00001 | 2983 | 3 | 898 | 603 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, S.; Bangunharcana, A.; Park, J.-M.; Choi, M.; Shin, H.-S. Visual SLAM-Based Robotic Mapping Method for Planetary Construction. Sensors 2021, 21, 7715. https://doi.org/10.3390/s21227715
Hong S, Bangunharcana A, Park J-M, Choi M, Shin H-S. Visual SLAM-Based Robotic Mapping Method for Planetary Construction. Sensors. 2021; 21(22):7715. https://doi.org/10.3390/s21227715
Chicago/Turabian StyleHong, Sungchul, Antyanta Bangunharcana, Jae-Min Park, Minseong Choi, and Hyu-Soung Shin. 2021. "Visual SLAM-Based Robotic Mapping Method for Planetary Construction" Sensors 21, no. 22: 7715. https://doi.org/10.3390/s21227715
APA StyleHong, S., Bangunharcana, A., Park, J.-M., Choi, M., & Shin, H.-S. (2021). Visual SLAM-Based Robotic Mapping Method for Planetary Construction. Sensors, 21(22), 7715. https://doi.org/10.3390/s21227715