2.1. Ferromagnetic Properties of 1018 Steel
A36 steel is commonly used on aboveground storage tanks and pipes, but accurate values of its magnetic properties are not readily available. Therefore, values for AISI 1018 steel are often used instead. The chemical compositions and mechanical properties are similar between A36 and 1018, such that several EMAT researchers have used magnetic properties of 1018 steel [
16,
17,
18].
A solution of the electromagnetic and magnetostrictive equations on ferromagnetic materials requires data pertaining to both the static case (conventional B-H curve) and dynamic case (magnetic permeability), as well as magnetostriction coefficients. The steel plate used here for experimental measurements is assumed to follow the SAE1018 B-H static curve and material properties defined within the COMSOL finite element program [
19], allowing for the calculation of static magnetic fields within the plate and wave propagation in a FE simulation.
Magnetostriction is the strain induced by an applied magnetic field. The magnetostrictive response of 1018 steel to an applied field was measured by Thompson [
17]. The curve was found under static conditions.
Under high-frequency oscillating fields, the magnetic permeability must be specified, as the B-H curve does not describe the steel’s behavior under these conditions. There are data on the transverse isotropic permeability, where the static field is much larger than and perpendicular to the dynamic field. The transverse isotropic permeability is found from empirical data from [
18], which considers frequency and static field strength. The EMATs in this study are operated at 0.25 MHz, but permeability data corresponding to that frequency is not available. Therefore, the closest published data is used instead, corresponding to a 0.35 MHz small dynamic field superimposed on a 0.4–1 kA/m static field. Despite the dynamic magnetic fields being significantly larger than the static field in the current EMATs, the assumption is made that the 0.35 MHz permeability curve is applicable.
2.3. Magnetostriction within the PPM EMAT
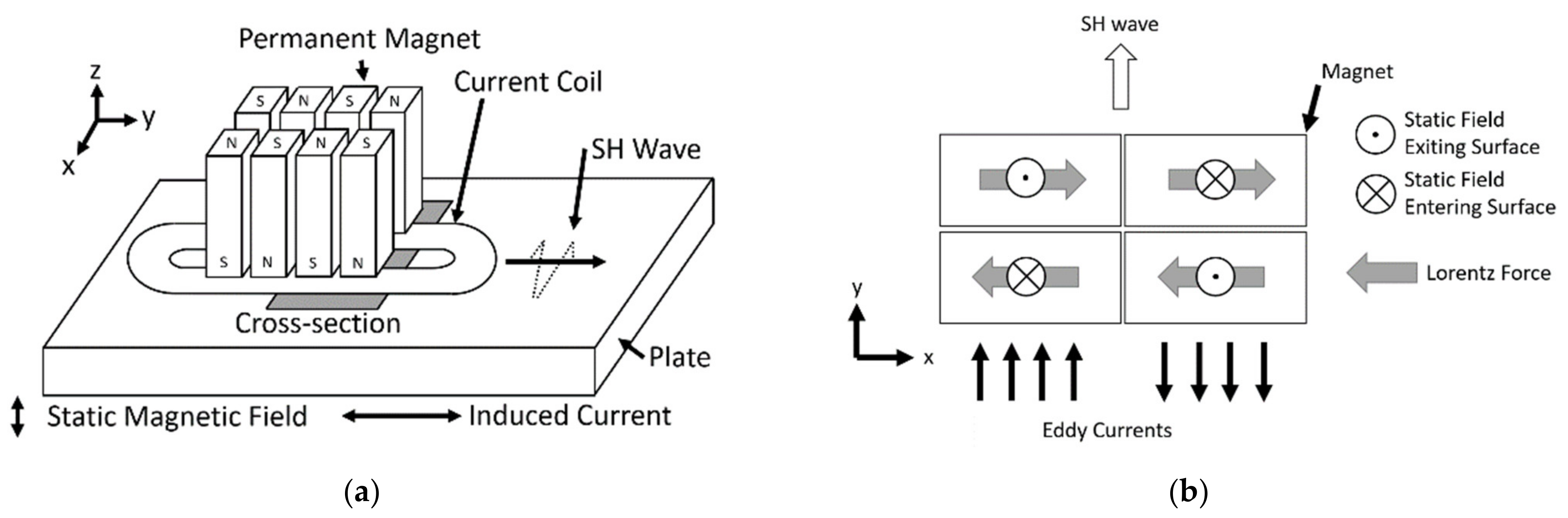
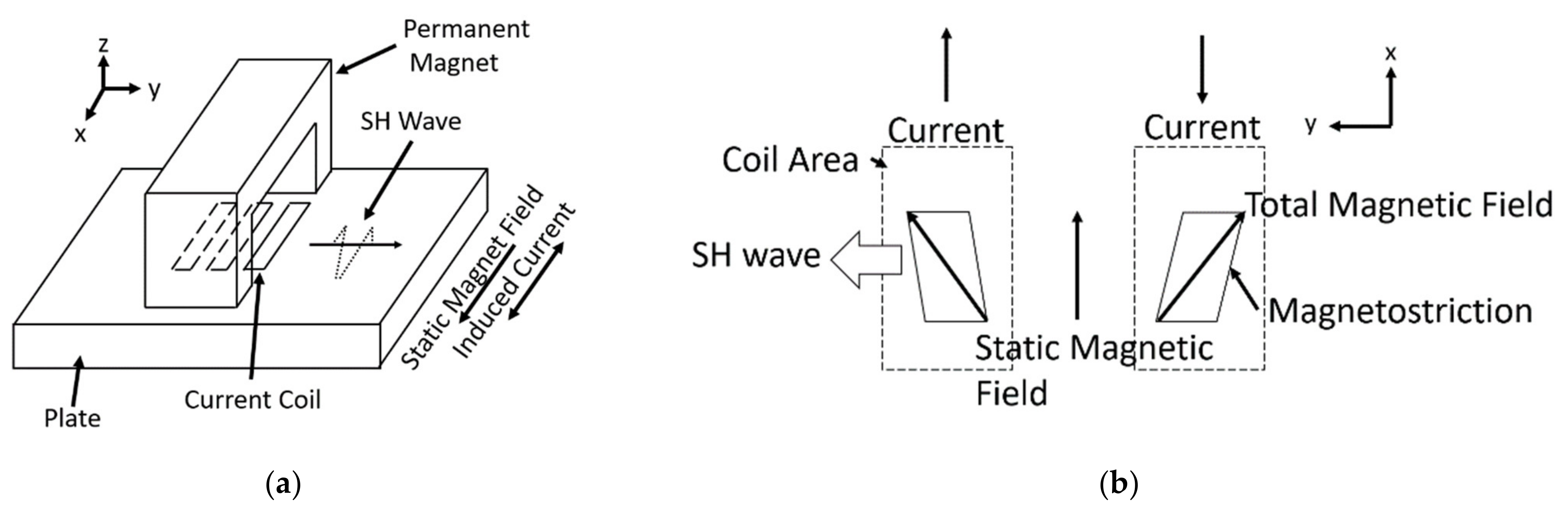
Since the coil in both the MS-EMAT and PPM EMAT configurations runs parallel to the plate surface, the main difference is the orientation of the coil lines with respect to the static field inside the plate. For a Lorentz-based EMAT, the static field in the plate must be perpendicular to the direction of the current in the coil, while in the MS-EMAT, the current runs parallel to the static field.
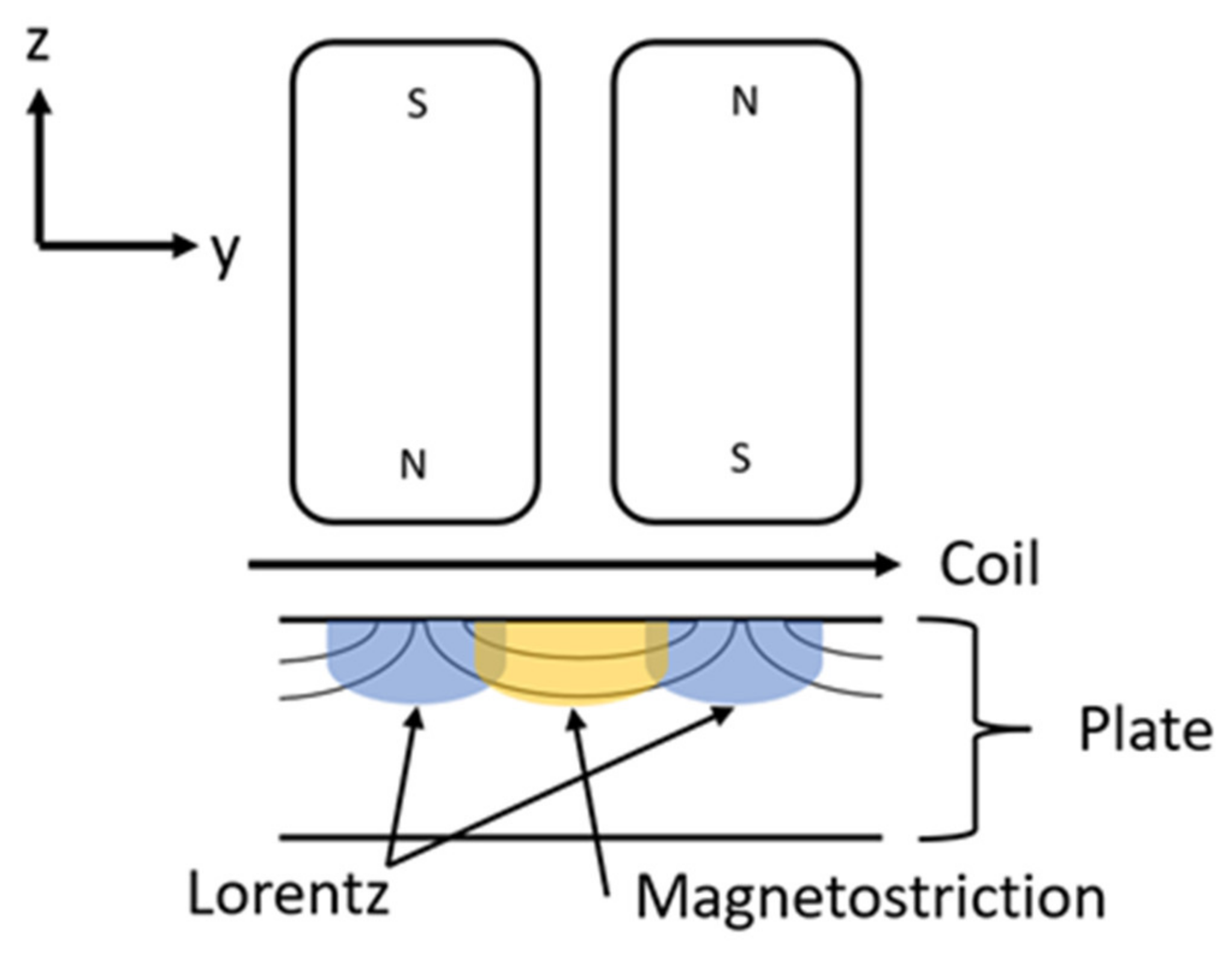
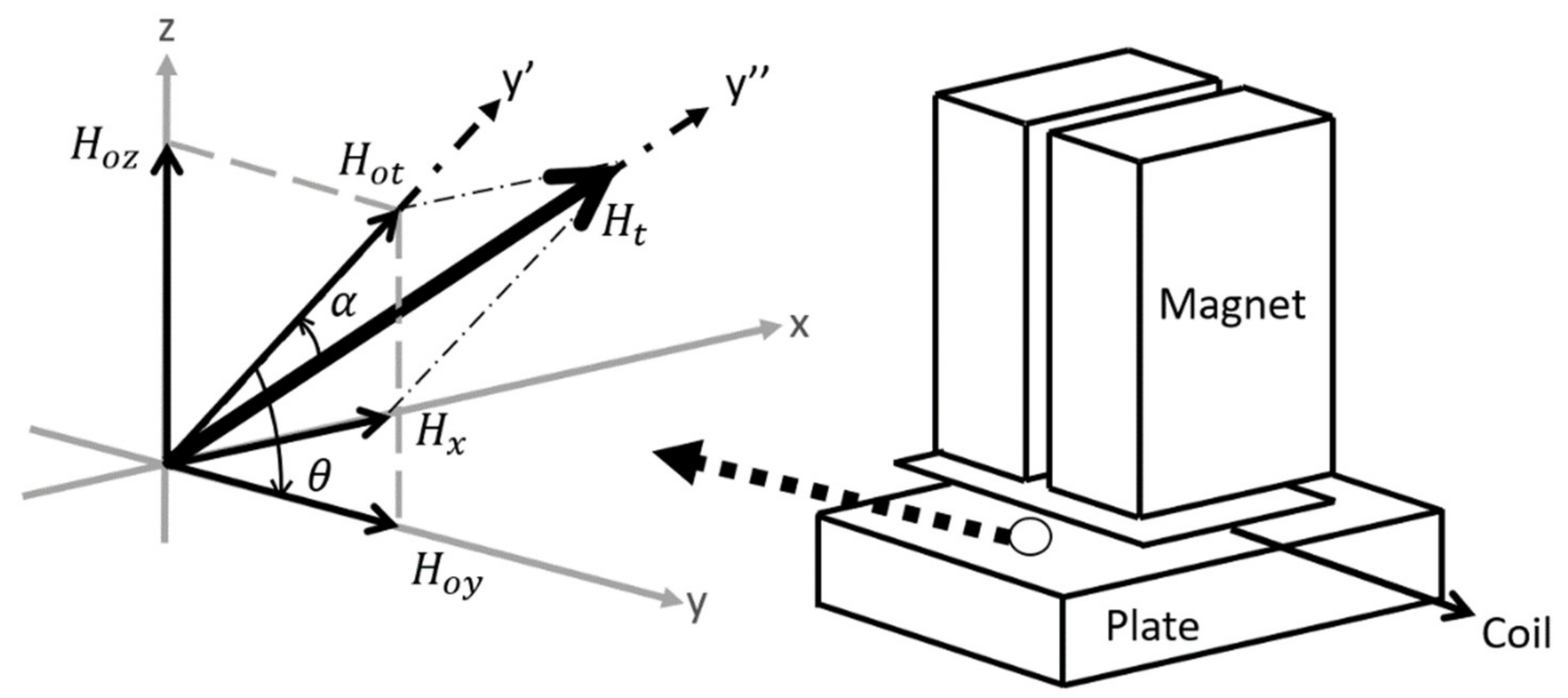
Both Lorentz and magnetostriction mechanisms occur within a PPM EMAT that operates on ¼″ (6.35 mm) thick steel plates. While the static field is perpendicular to the surface of the plate when it enters the plate, the shortest magnetic path in a permeable material towards the opposite pole is along the surface of the plate (
Figure 3). Therefore, a significant portion of the static field is oriented parallel to the main lines of the racetrack coil; that geometry induces magnetostriction in the steel, such that both magnetostriction and Lorentz effects lead to the generation of SH waves.
It is difficult to use only experimental methods to determine the significance of each mechanism within the PPM EMAT, as both mechanisms are excited by the same coil and magnetic field pattern. As a result, each mechanism simultaneously produces SH waves at the same frequency and wavelength. Measuring high-frequency strains within the plate underneath the PPM EMAT, is also a challenge. With direct measurements being impractical, a numerical magnetostriction model that applies to both the PPM EMAT and MS-EMAT should be derived instead. Next, the magnetostriction model for the transmitter can be calibrated using the MS-EMAT (pure magnetostriction mechanism) experimental data in addition to PPM EMAT (both magnetostriction and Lorentz mechanisms) readings. Finally, the individual components of the total PPM EMAT numerical simulation can be isolated to determine the relative strengths of the magnetostriction and Lorentz mechanisms.
2.4. PPM EMAT Magnetostriction Model
A valid magnetostriction model should be applicable to various EMAT configurations, including both PPM and MS-EMATs. To that end, the conventional linear magnetostriction model [
23] (p. 26) is extended to include two static field components. In addition, the high static bias field assumption of the conventional linear model needs to be excluded as it does not apply to all EMAT configurations.
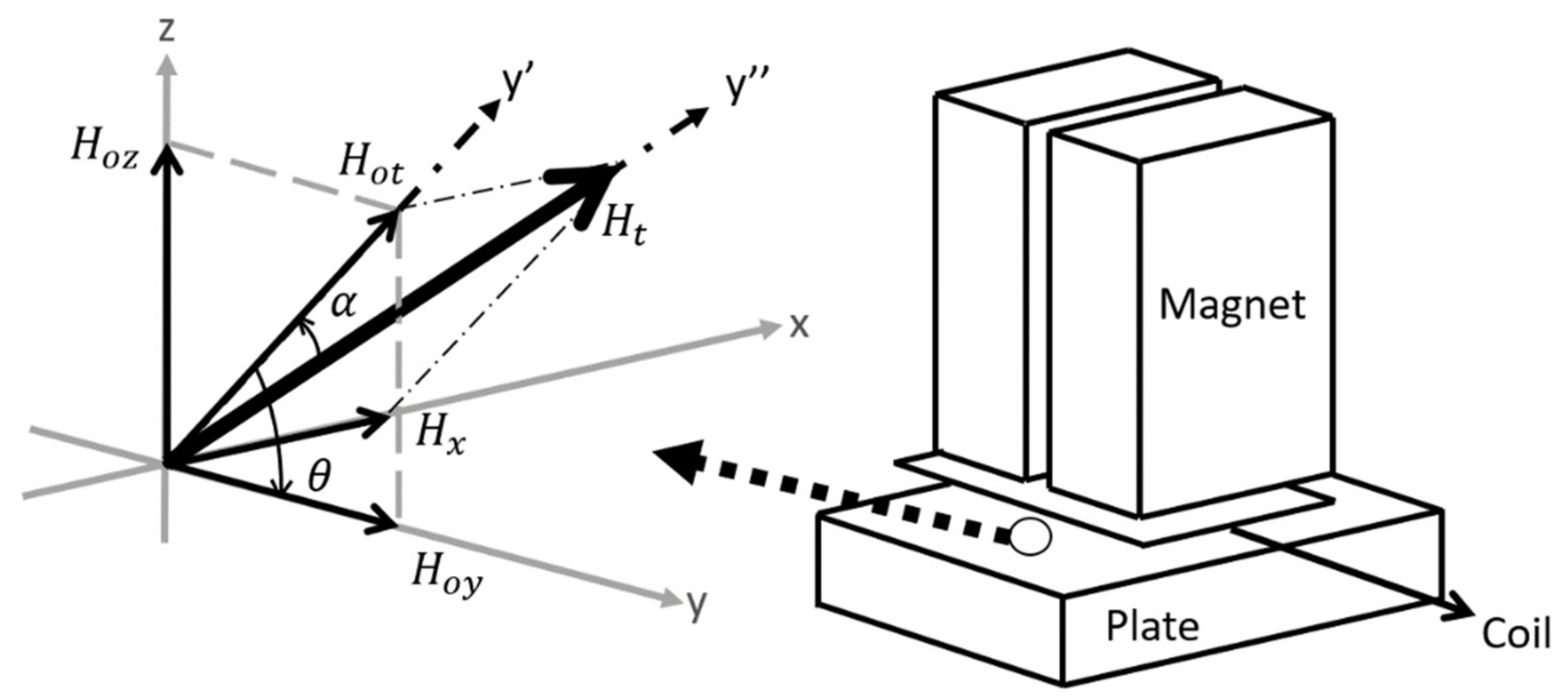
From
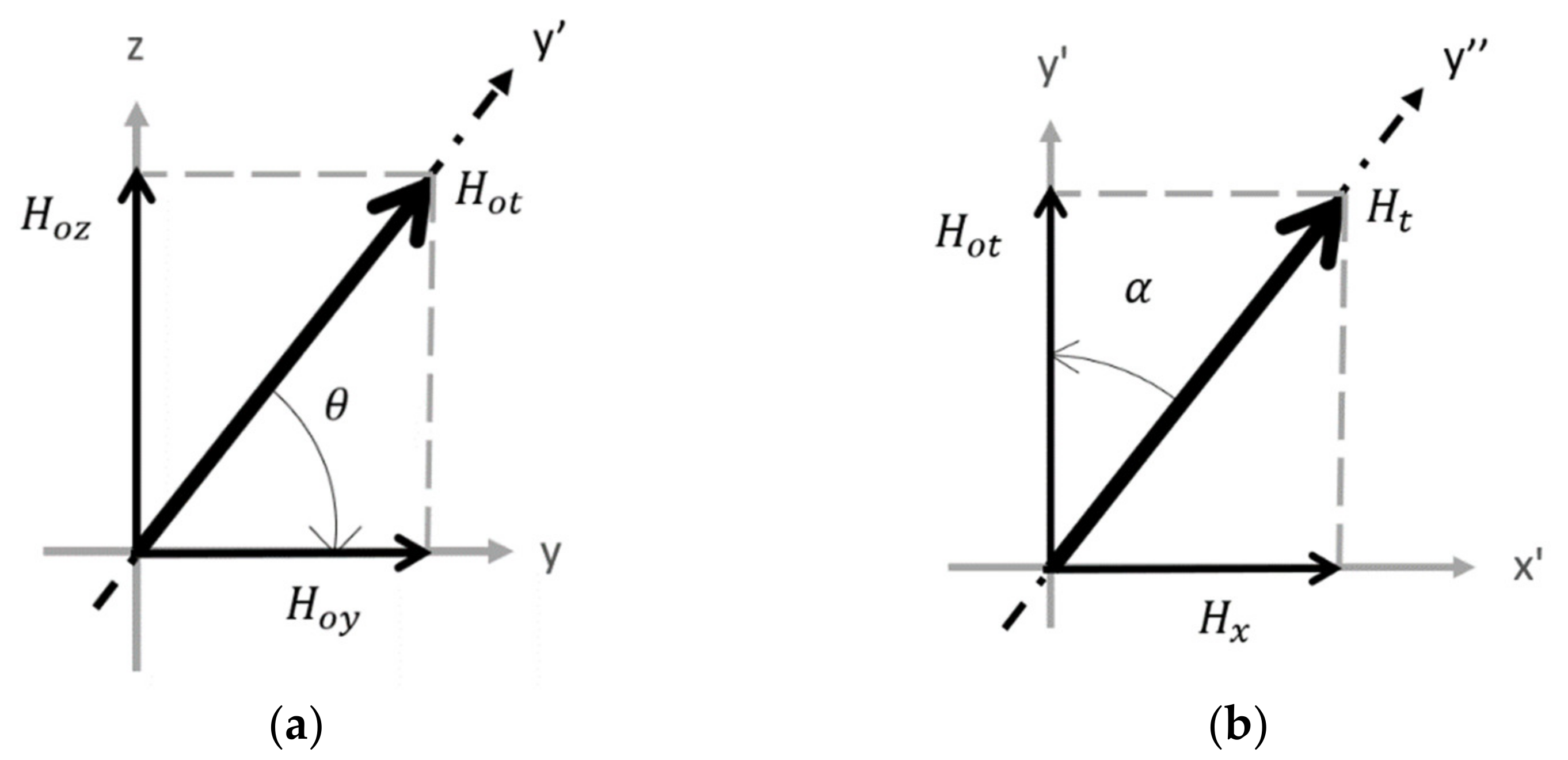
Figure 3, the PPM array produces two major static field components: the y-component (
) and the z-component (
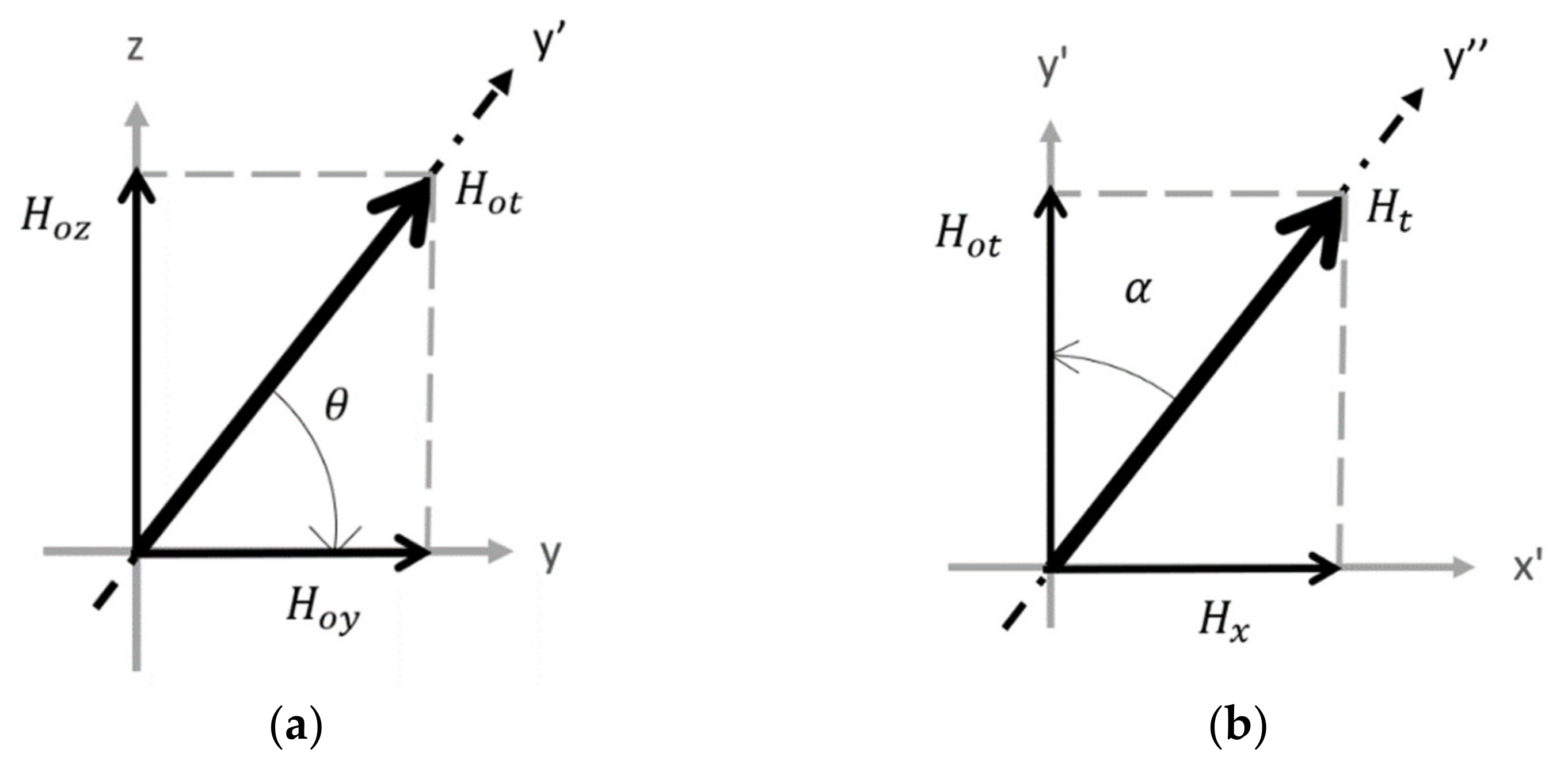
). (The x-component is insignificant in terms of generation of SH waves and neglected from the calculation.) There are three coordinate systems: x-y-z, x’-y’-z’, and x”-y”-z”. The basis vectors of the x”-y”-z” system are in the three principle strain directions, while the x’-y’-z’ system is an intermediate system between the x-y-z and x”-y”-z” systems. The total static field vector is represented by its magnitude
and directional angle
in the y-z plane (
Figure 4a); the total field (static field plus dynamic field) can be represented by its magnitude
and directional angle
(
Figure 4b). A 3D diagram of both coordinate systems along with one side of a PPM EMAT is depicted in
Figure 5. The angles can be defined as
Some assumptions regarding our magnetostriction model are retained from the original linear model of reference [
23]. Magnetostrictive strain is assumed to be oriented along the direction of the total field vector, and magnetostriction is assumed to be an equivoluminal process. Polycrystalline materials, such as steel, can be considered to be isotropic [
27] p. 355, because the average magnetic domain size is much smaller than the ultrasonic wavelength.
The magnetostrictive strain
S″ in the principal coordinate system (x”-y”-z”) is [
23] (p. 27)
where
is the total magnetostriction in the
z” direction. The magnetostrictive strain tensor is transformed to the global coordinate system (x-y-z) from its principal coordinate system by two consecutive rotations so that it can be related to both the static and dynamic electromagnetic fields exerted by an EMAT’s magnets and coils
where
Rotating the strain tensor is easier in its 3 × 3 form but will be referred to its Voigt notation form (6 × 1) for the rest of the derivation. Next, the strain tensor is differentiated with respect to
,
, and
to find the magnetostrictive coefficients
where
and
. This study is focused on SH waves (xy-component) and the PPM EMAT’s racetrack coil produces a magnetic field oriented primarily in the x-direction. Therefore, only the xy-component (component 6 in Voigt notation) induced by an x-direction field,
, is needed for this investigation
where
is the slope of the magnetostriction curve at the total magnetic field strength point. Magnetostriction is hysteretic [
28], so the strain is not precisely aligned with the applied field. It is observed from preliminary experiments that the theoretical model does not agree well with experimental MS-EMAT data, which means that nonlinear effects are significantly affecting the non-hysteretic model. The average impact of nonlinear effects such as hysteresis can be approximated through the use of empirical factors added to estimated values of
. This yields a semi-empirical equation for the key magnetostrictive coefficient relevant to the PPM EMAT
where
Equations (13)–(16) can also be applied to a model of the MS-EMAT with its respective coefficient (
) by setting
in Equation (13), with only a slight change to Equation (15)
is the point of peak static magnetostriction on the magnetostriction curve, which is approximately 5000 A/m on the 1018 steel magnetostriction curve [
17].
is the center point for Equation (14), which empirically modifies the value of
to
to better account for the change in signal amplitude that is caused by the static field.
is set to 797 A/m for the PPM EMAT and MS-EMAT configuration in this study to simplify the finding of the empirical factors.
,
,
, and
are empirical fitting factors to account for hysteresis effects.
modifies the magnitude of the magnetostriction curve calculation in Equation (16).
decreases the angle between the static and dynamic field (Equation (15)) caused by the lag between the strain and applied field.
modifies the magnitude of the magnetostriction data from the static magnetostriction curve (
).
adjusts the value of the static magnetic field strength used to calculate the magnetostriction coefficient in Equation (14). The empirical factors are found by fitting the model predictions with experimental data from MS-EMATs and PPM EMATs.
and
are the
and
values modified by
and
, respectively.
The proposed model’s restrictions are:
The total field must be greater than the inflection point of the specimen’s magnetostrictive curve (). This limitation is due to the formulation of Equation (16), which does not apply when . Most commercial EMATs are pulsed at high currents for high signal levels, which usually satisfies this condition.
The model only predicts the xy-component of the shear and stress driven by a dynamic field in a single dominant direction. These are satisfied by SH wave EMATs.
The model’s results can only be considered valid for the static and dynamic fields produced by the EMATs in the experimental data used to derive the empirical factors. A new set of empirical factors to account for hysteresis and other nonlinear phenomena would need to be found for other operating regimes. Equation (13) can only be applied in a limited area underneath the EMAT footprint. If applied across the entire geometric space beyond that limited area, results are poor where there are very low dynamic or static fields.
Magnetostriction Model Implementation Procedure
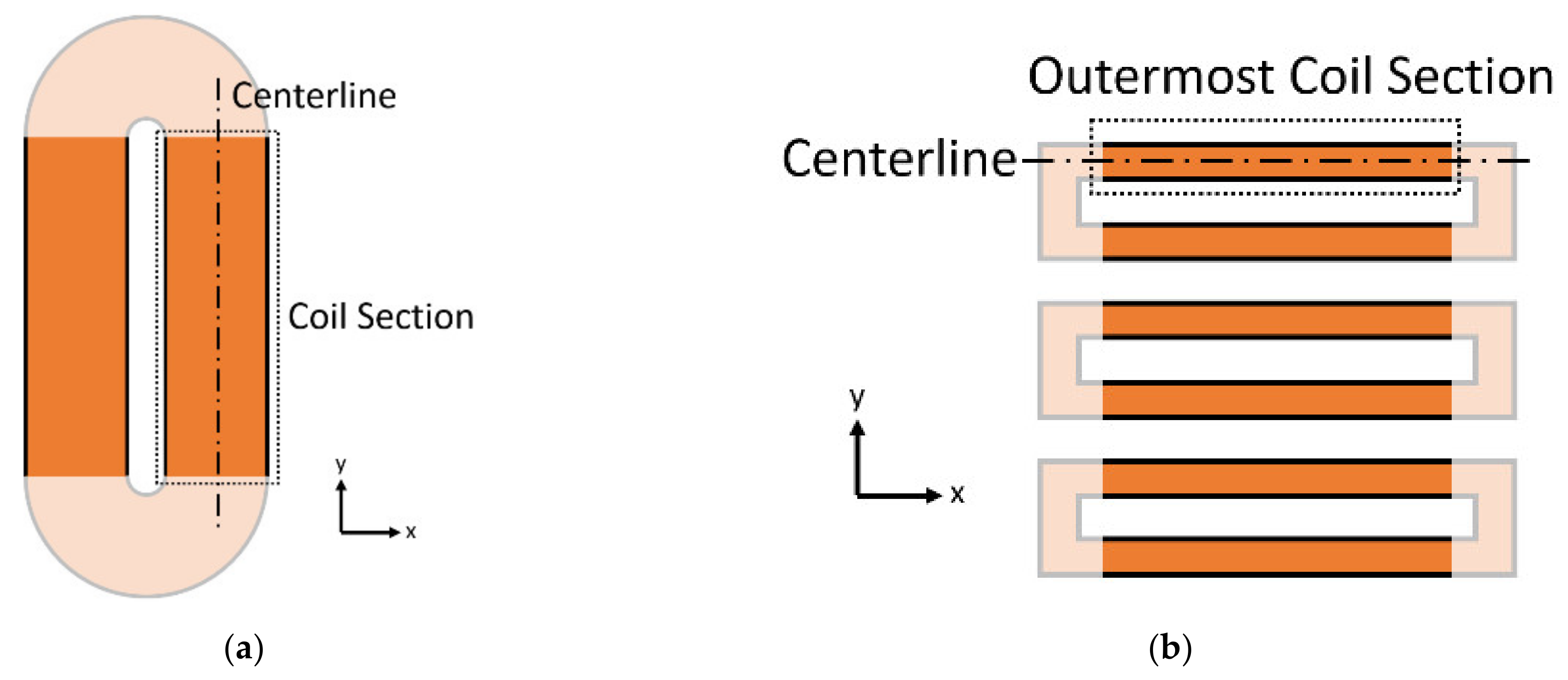
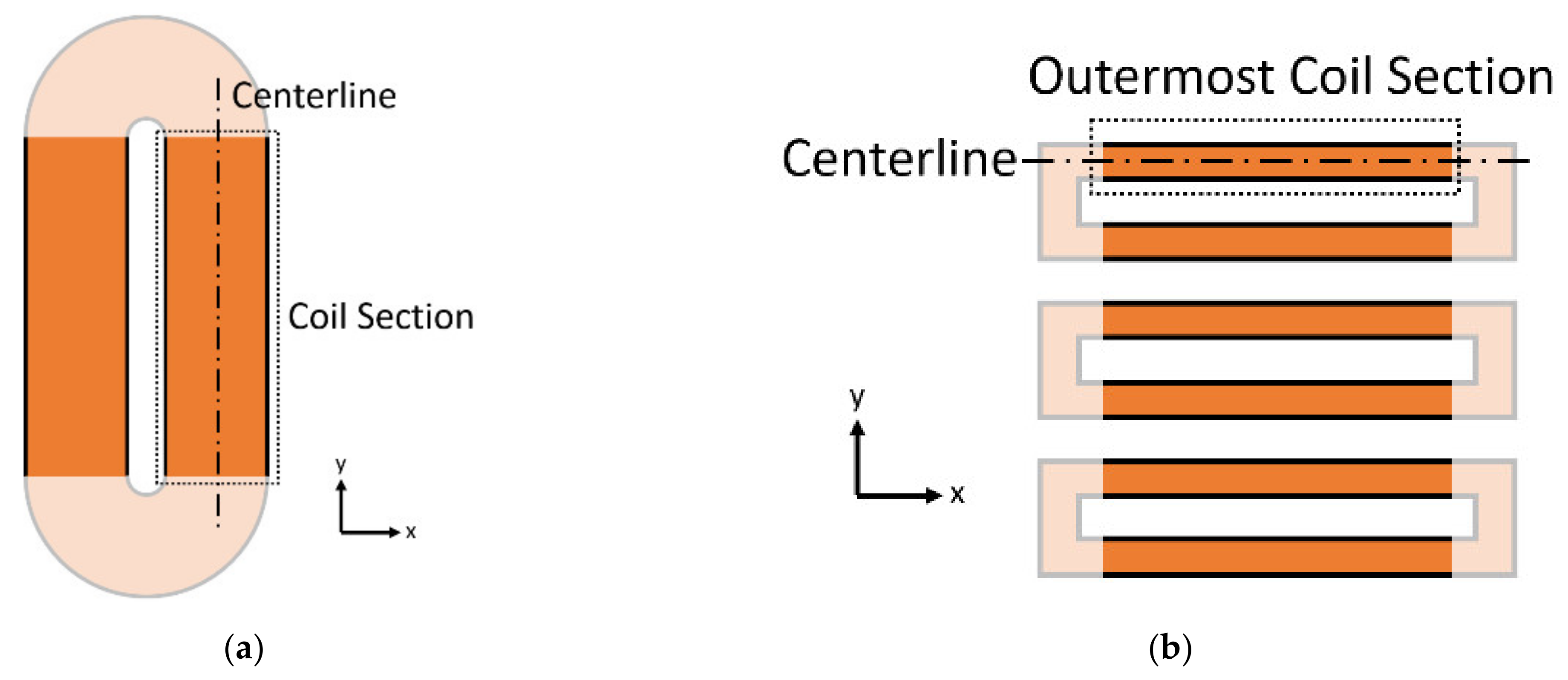
The first step to employ the new model is to solve the static magnetic field using a finite element program such as COMSOL Multiphysics. In the PPM’s case, the
values at the surface of the plate (centerline underneath each row of magnets, as seen in
Figure 6a) are used for the entire sensor as a y-dependent value. A simplification can be made for the MS-EMAT’s case: As
produced by the horseshoe magnet is nearly constant beneath the coil,
is averaged over the entire transmitter coil area, within the plate volume.
Next, another set of frequency-domain magnetic field simulations are performed at the current burst’s center frequency. The dynamic field originating from the alternating current in the transmitter coil is solved; the input current to the coils inside the simulation is the average amplitude of the experimental current in the time domain. can then be found. The range of values must be reduced to a single effective value for each EMAT experimental case to allow for simple derivation of magnetostriction empirical factors later.
For the PPM EMAT, a single average value for
is determined from Equation (15) under the centerline of the racetrack coil (
Figure 6a), as that location contains the highest dynamic fields and, thus, accounts for a majority of the wave generation. For the MS-EMAT, Equation (17) is used to find a single effective value of
, determined using the centerline of the outermost section of the meander coil. (Simulation tests indicate that it is the outermost sections (
Figure 6b) of the meander coil that contribute the most to the SH wave generation).
Determining a value for
to be used in finding values for
and
(Equation (16)) follows the same guiding principles as for the determination of
: An effective average value for
is computed under the centerline coil section (
Figure 6a) for the PPM EMAT or centerline outermost coil section (
Figure 6b) for the MS-EMAT, on the surface of the plate.
As a consequence of these averaging operations, all regions under the transmitter coil for the MS-EMAT should share the same value. For the PPM EMAT, the value for varies along the y-direction only.
2.5. Finite Element Modeling of Entire NDT System to Determine Magnetostriction Empirical Factors
The entire EMAT transmitter, propagation of SH waves inside the plate, and receiver are simulated in the frequency domain using COMSOL Multiphysics 5.6. The transmitter, wave propagation, and receiver are simulated separately to reduce memory requirements. Feedback effects are assumed to be insignificant due to the low efficiency of EMATs and distance between the EMATs (300 mm). The 1018 steel test plate is sized to be much larger than the EMATs (914.4 mm × 304.8 mm × 6.35 mm thick) so that the reflected waves do not interfere with the results. There is a transmitter and receiver, spaced 300 mm apart. This approach has been used in the literature to model EMAT performance [
16,
26,
29,
30,
31,
32]. Two sets of simulations with the MS-EMAT and PPM EMAT transmitters are performed, but only the PPM EMAT receiver receives both sets.
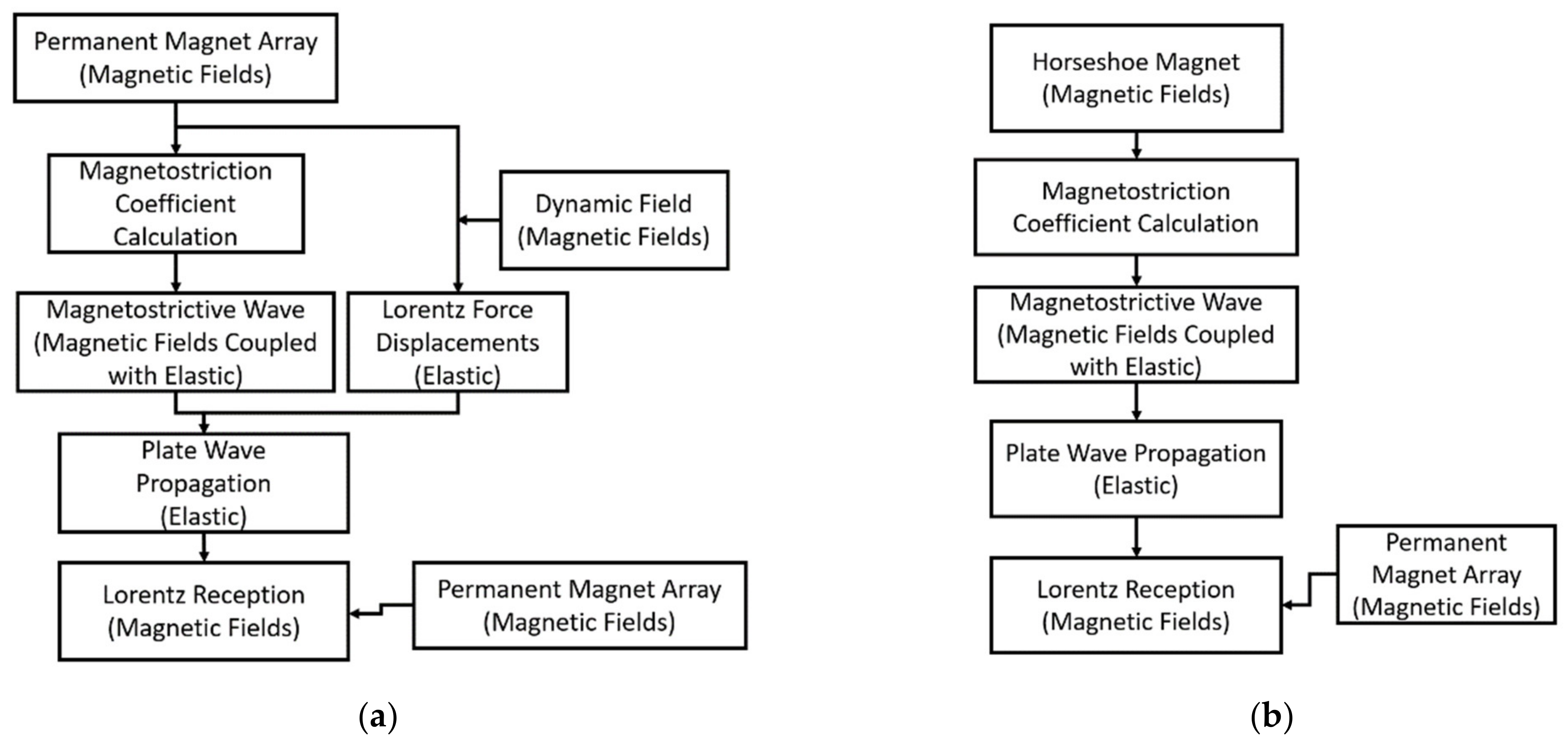
The modeling procedure is similar for both the MS-EMAT and PPM EMAT transmitter. First, a static magnetic field simulation is run without the influence of the coil to find the magnetic flux density or field strength. These static fields are needed as input to both the Lorentz and magnetostriction equations for the PPM EMAT, or just the magnetostriction equation for the MS-EMAT. Next, a dynamic frequency-domain magnetic field simulation is run; this only includes the active meander (MS-EMAT) or racetrack (PPM EMAT) coils and plate. The input to the coil for the simulation is the Fourier transform of the experimentally measured input current. All input current waveforms have a bandwidth of 100 kHz, which is discretized into 5 kHz bins. No major changes to the receiver voltage waveform are observed when the simulations are discretized at 1 kHz instead of 5 kHz.
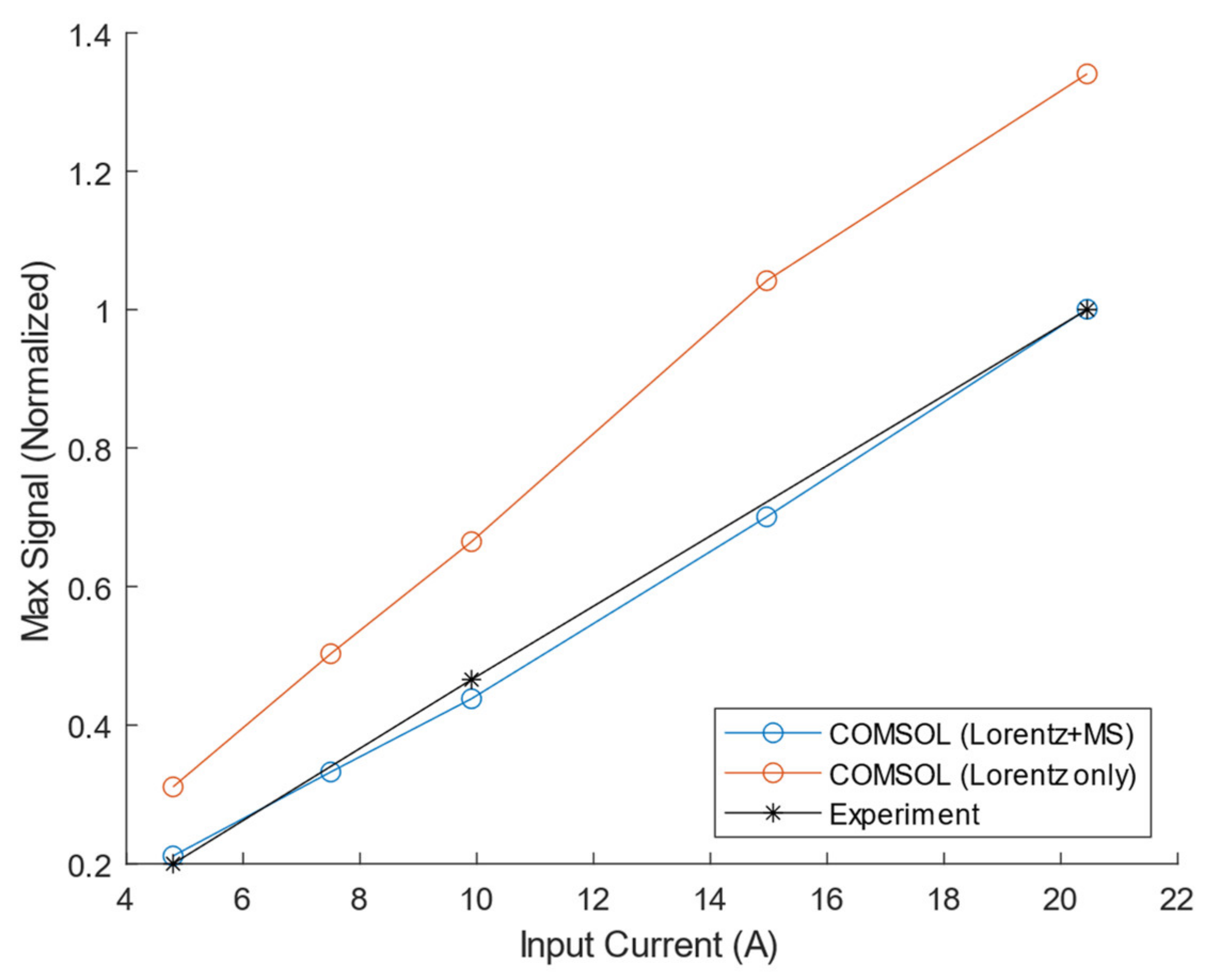
The Lorentz and magnetostriction mechanisms within the PPM EMAT transmitter are solved separately, and the total output is summated to yield the transmitted wave. With the Lorentz mechanism, the induced forces can be calculated directly from separate frequency-domain and static simulation results, then used as input into an elastic simulation. For magnetostriction, the electromagnetic and elastic equations are coupled and are solved together. The MS-EMAT has no significant Lorentz components due to the geometry of the horseshoe magnet and meander coil, so only the magnetostriction is solved with FE.
After the transmitter simulation is complete, the displacements are inserted into a wave propagation simulation containing only the plate to find the displacements at the PPM EMAT receiver. Finally, those displacements are used for the PPM EMAT receiver simulation to find the receiver voltage. The block diagrams of the simulation processes are shown in
Figure 7.
The MS-EMAT’s horseshoe magnet is meshed using tetrahedral elements. Symmetry is used to reduce the problem to quarter size with suitable boundary conditions. The magnet assembly and plate are meshed at 2 mm, but element size is reduced to 0.3 mm where the field exits the magnet and enters the plate. The elements away from the critical areas have a growth rate of 1.5 up to a maximum element size of 61 mm.
The electromagnetic domain within the plate is limited to three times the skin depth, which is substantially thinner than the plate (6.35 mm). Regions deeper than three times the skin depth and areas away from either transmitter or receiver coils contain negligible eddy currents and can be solved with only elastic equations. At least three elements per skin depth are required to accurately represent the dynamic magnetic field [
25], so ten elements through the thickness of the plate are used in the frequency-domain simulation meshes; these elements are distributed so that elements are small and close to the surface to model the dynamic field decay with depth accurately.
The dynamic MS-EMAT mesh has eight elements per wavelength as there are no substantial improvements in ultrasonic wave simulation from a finer element size [
33]. The meshes are comprised of hexahedral elements, which are more memory efficient than tetrahedral elements for rectangular shapes. A ring of perfectly matched layers (PMLs) absorbs acoustic waves that impinge the boundaries of the modeled region, such that the wave propagation simulation approximates that of an infinite plate [
19]. The PML ring needs at least seven elements per SH wavelength to suppress any ultrasonic wave reflections [
34]. The total PML here is one wavelength deep and contains ten element layers.
The dynamic PPM EMAT mesh is sized in the same way as the dynamic MS-EMAT mesh, with eight elements per wavelength and a PML ring of ten elements. Since the dynamic field requires a finer mesh than the static field, the dynamic mesh can be reused for the static field simulation without a loss in accuracy. The transmitter and receiver PPM EMAT mesh are identical.
The wave propagation mesh includes the footprint of the MS-EMAT or PPM EMAT transmitter along with the PPM EMAT receiver footprint, spaced 300 mm apart. In all cases, the mesh is identical because the footprints are identical. The plate is surrounded by a PML ring with ten elements to suppress reflections from the edges.
2.6. Experimental Setup
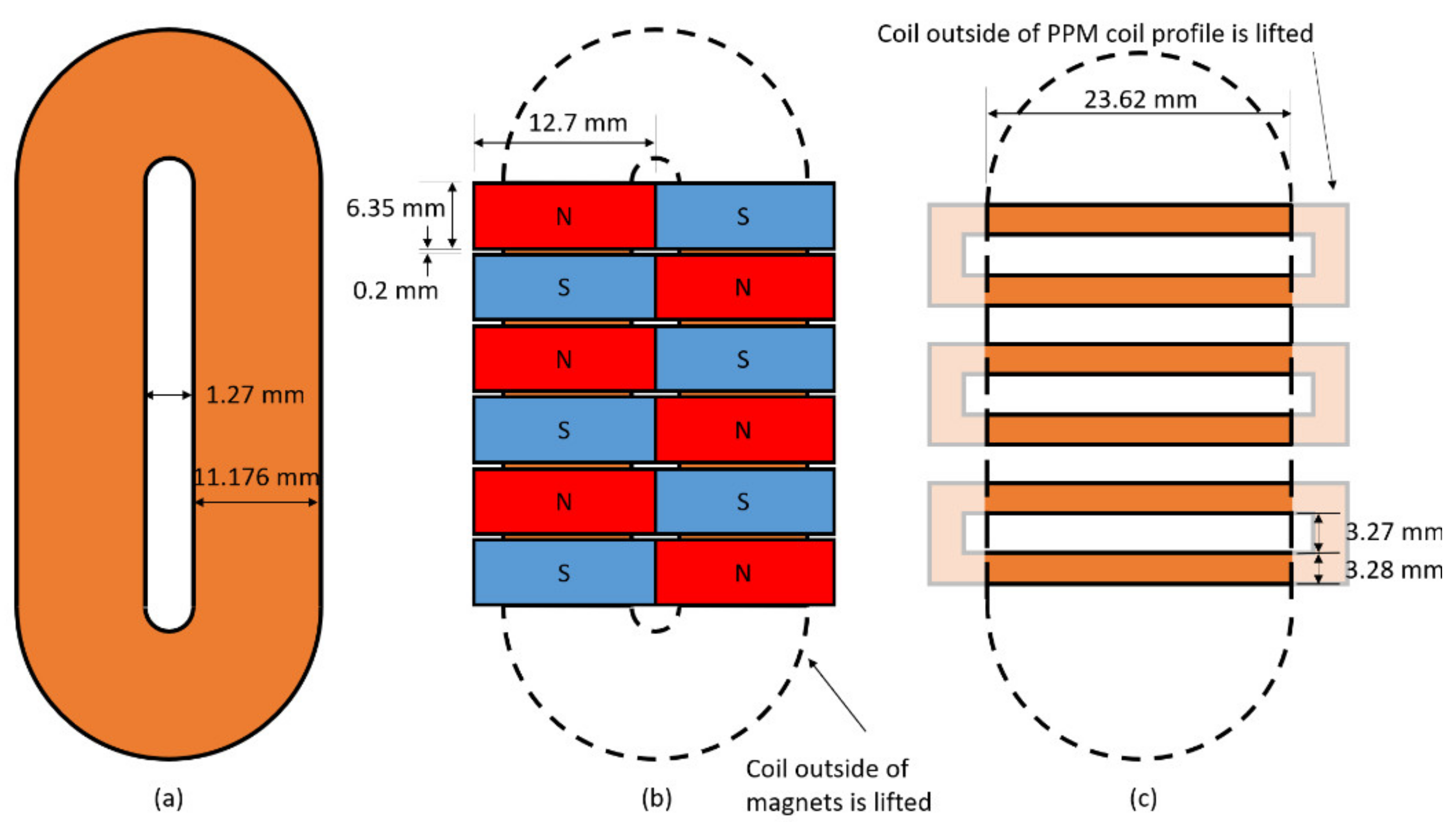
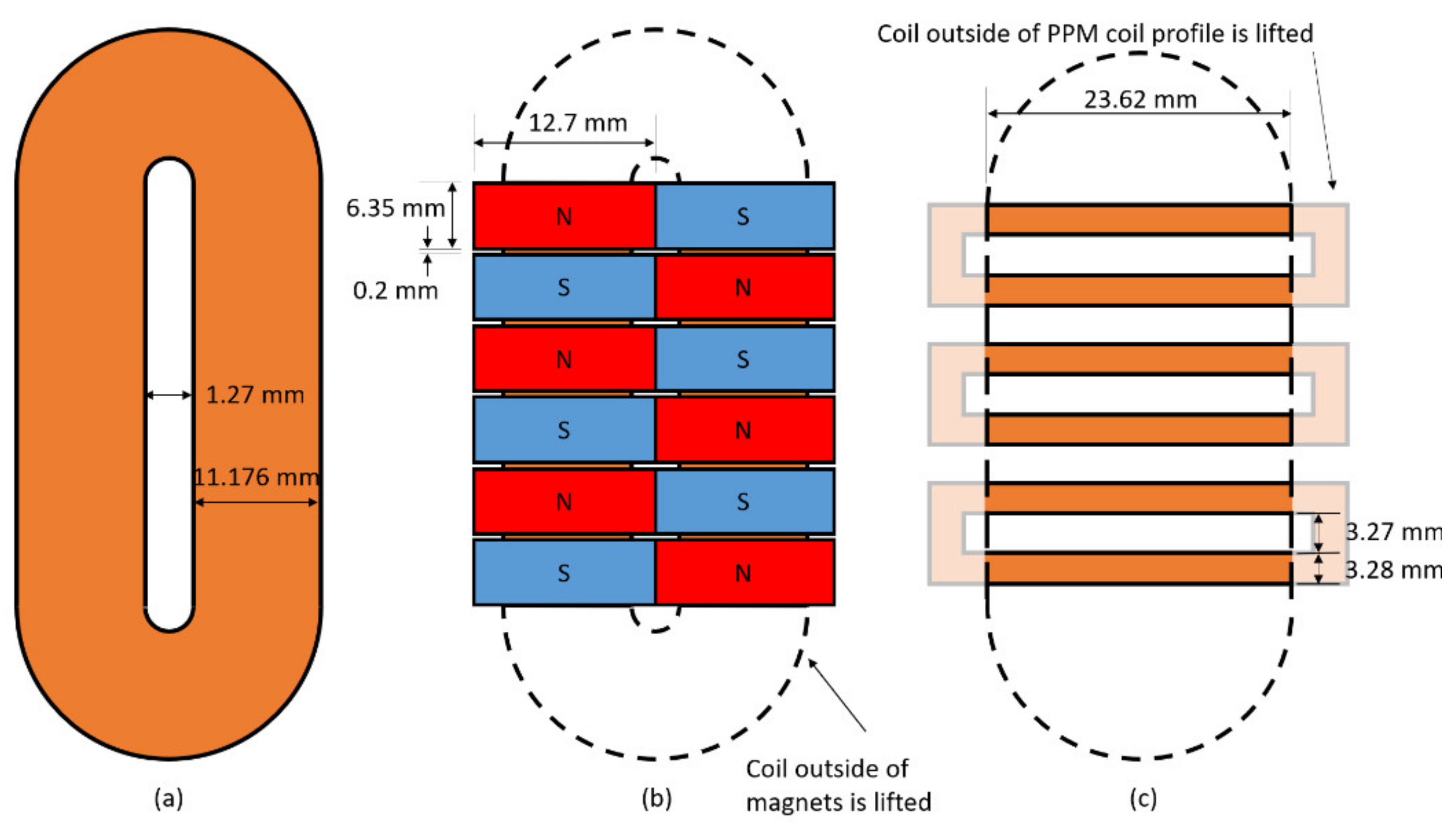
A PPM EMAT system is made for inspecting a 914.4 mm × 304.8 mm × 6.35 mm thick 1018 steel test plate. There is a transmitter and receiver, spaced 300 mm apart. The transmitter is designed to induce SH0 waves, with a center frequency of 250 kHz at 13.1 mm wavelength, minimizing the space between magnets (an area that induces magnetostriction). The racetrack coil has 30 turns. The PPM receiver is identical to the transmitter.
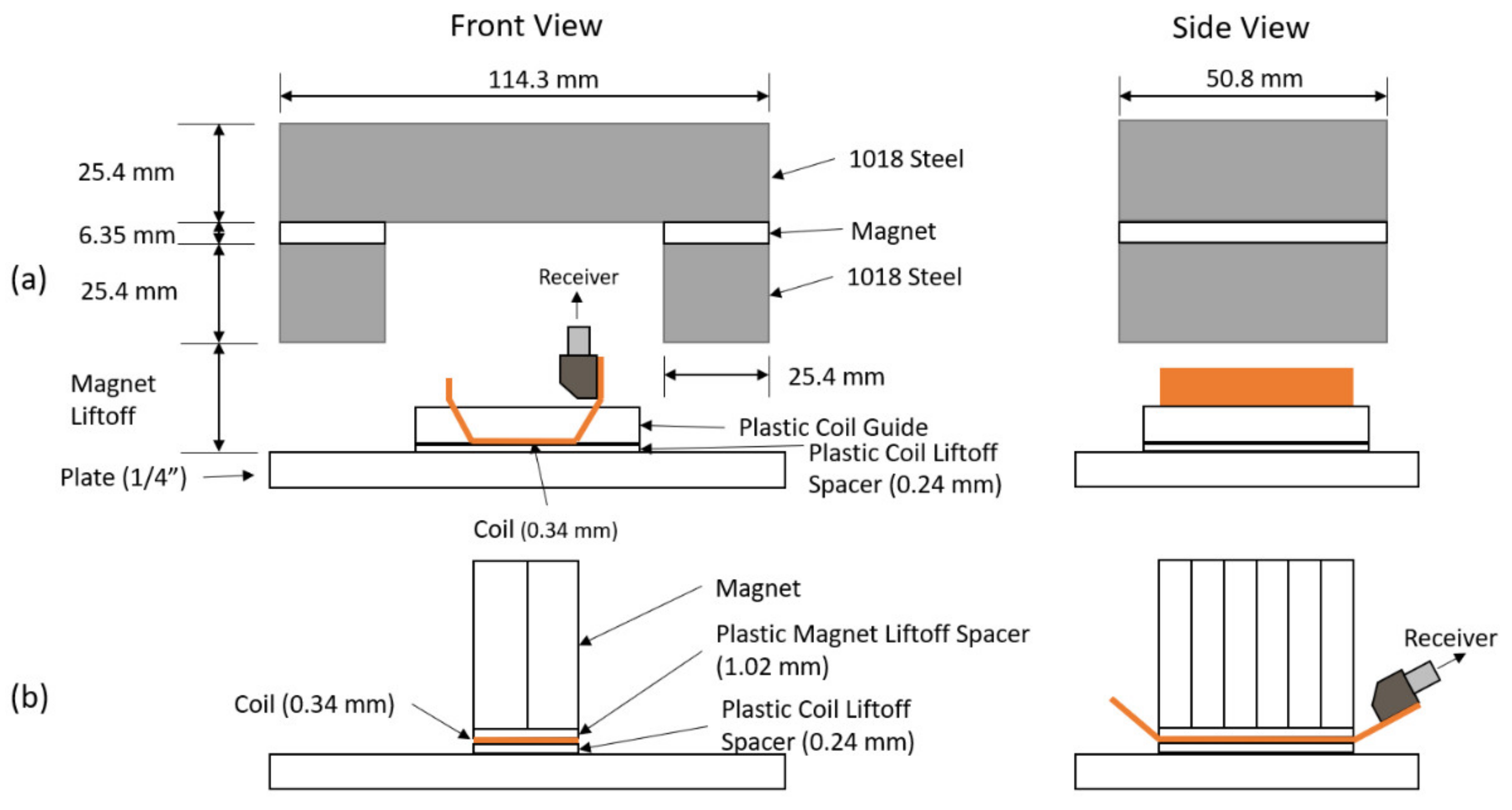
An MS-EMAT transmitter with a 12-turn meander coil is designed to run at the same wavelength, frequency, and on the same section of steel as the PPM EMAT transmitter to gather magnetostriction data while minimizing the number of variables. The same PPM receiver as used for the PPM transmitter is used for this system, such that the effects of only switching transmitters can be assessed.
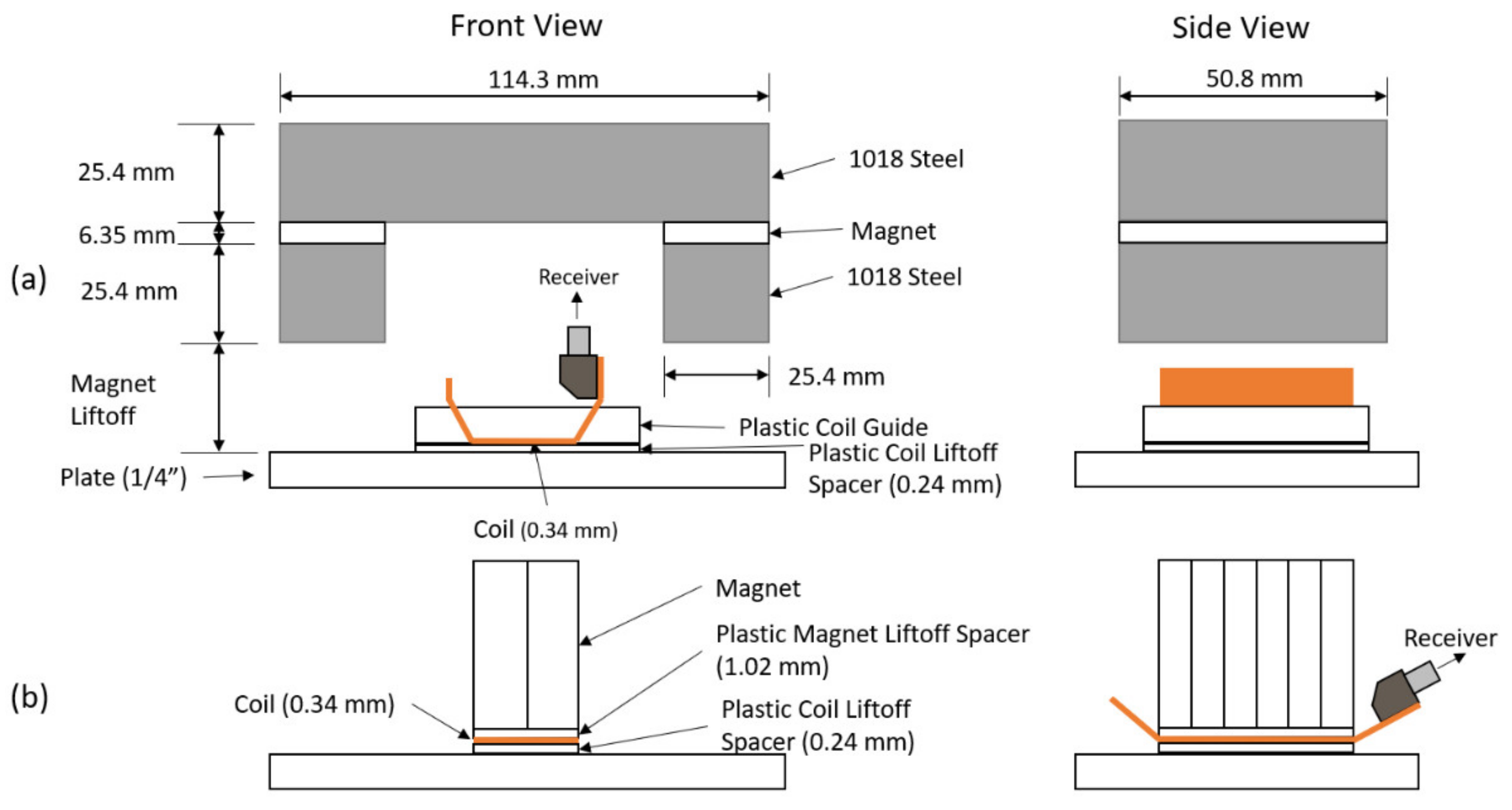
Schematics of both EMAT transmitters are shown in
Figure 8 and
Figure 9. The coil segments outside of the magnet footprint are lifted to reduce the eddy currents they generate. In the case of the MS-EMAT, the liftoff of those exterior coil segments eliminates any Lorentz components.
The PPM itself is made of 12.7 mm × 6.35 mm × 25.4 mm thick N42 magnets. The horseshoe magnet for the MS-EMAT comprises two 50.8 mm × 25.4 mm × 6.35 mm thick N52 magnets and 1018 steel blocks. Both EMAT coils have 0.34 mm thick, with active sections at 0.24 mm liftoff.
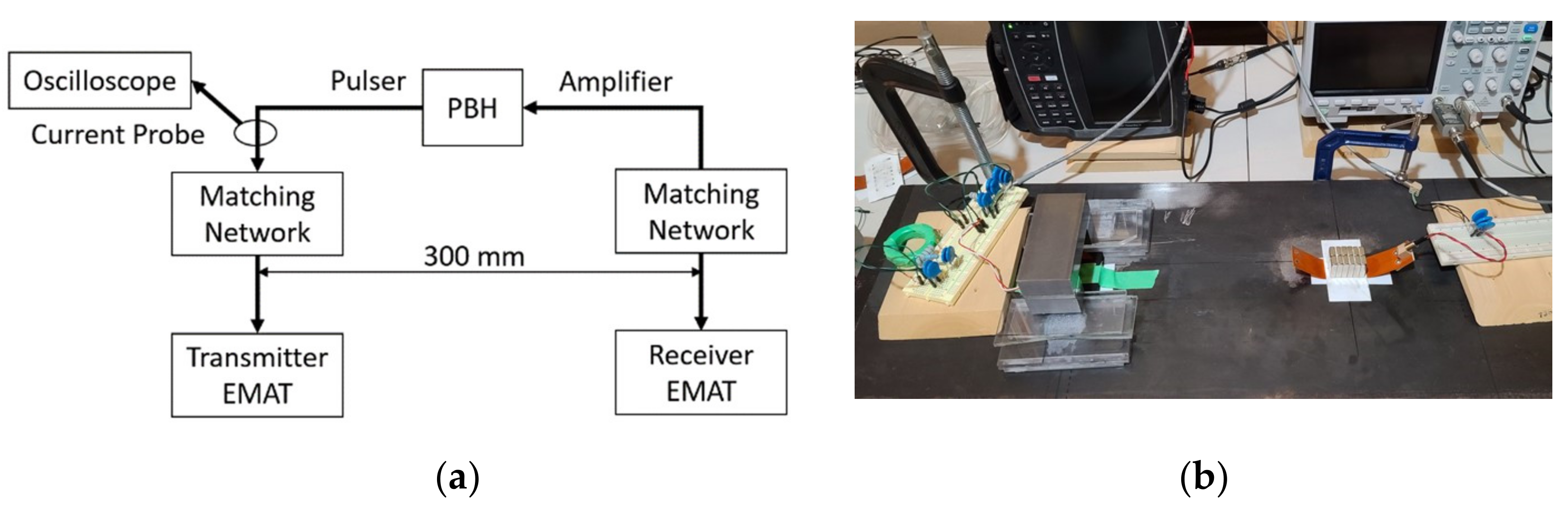
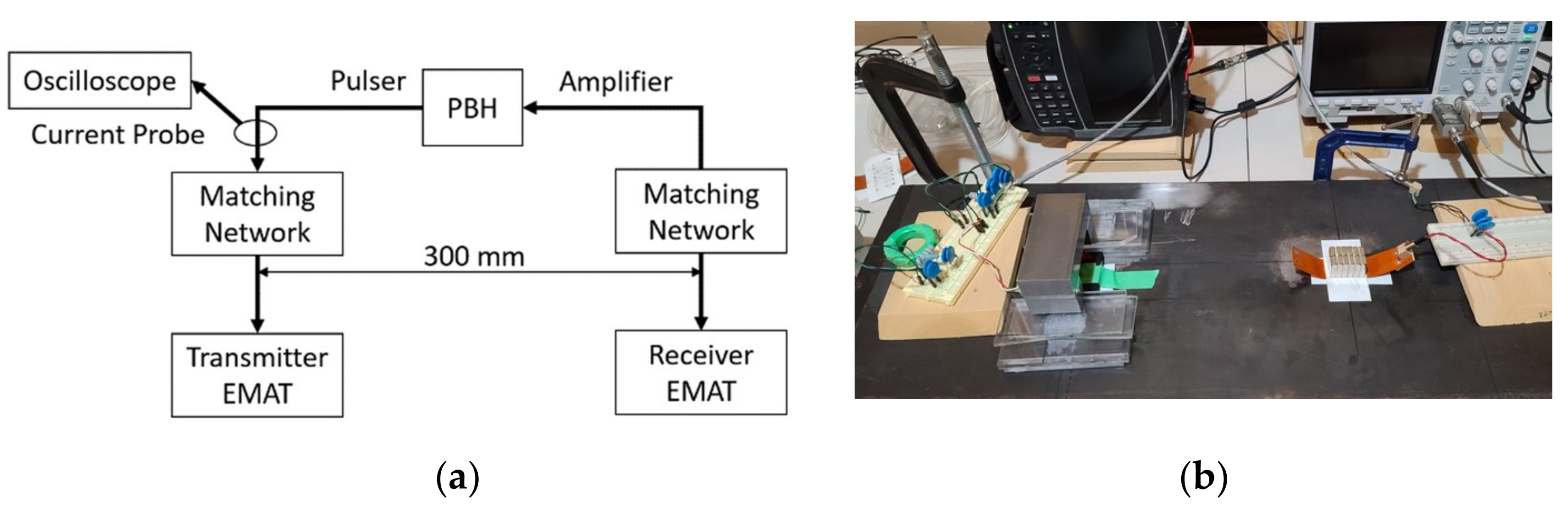
A PowerBox H (PBH) system (Innerspec Technologies, Forest, VA, USA) is used to pulse the transmitter EMATs and amplify the receiver voltage. The input current is measured with a Tektronix P6022 current probe. The PBH is set to time-average the receiver voltage 16 times, with a pulse repetition frequency of 15 Hz. Custom impedance matching circuits are designed to maximize the received signal.
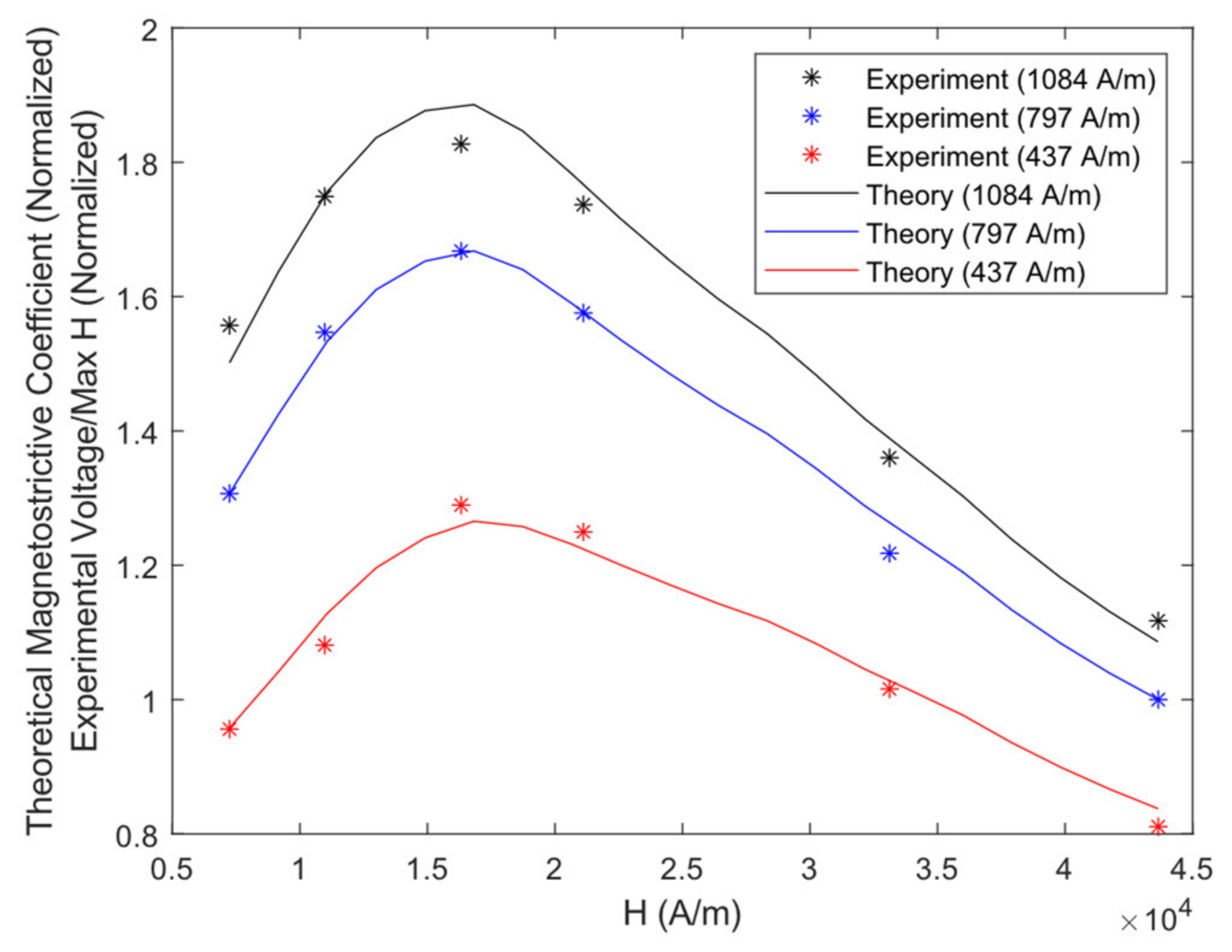
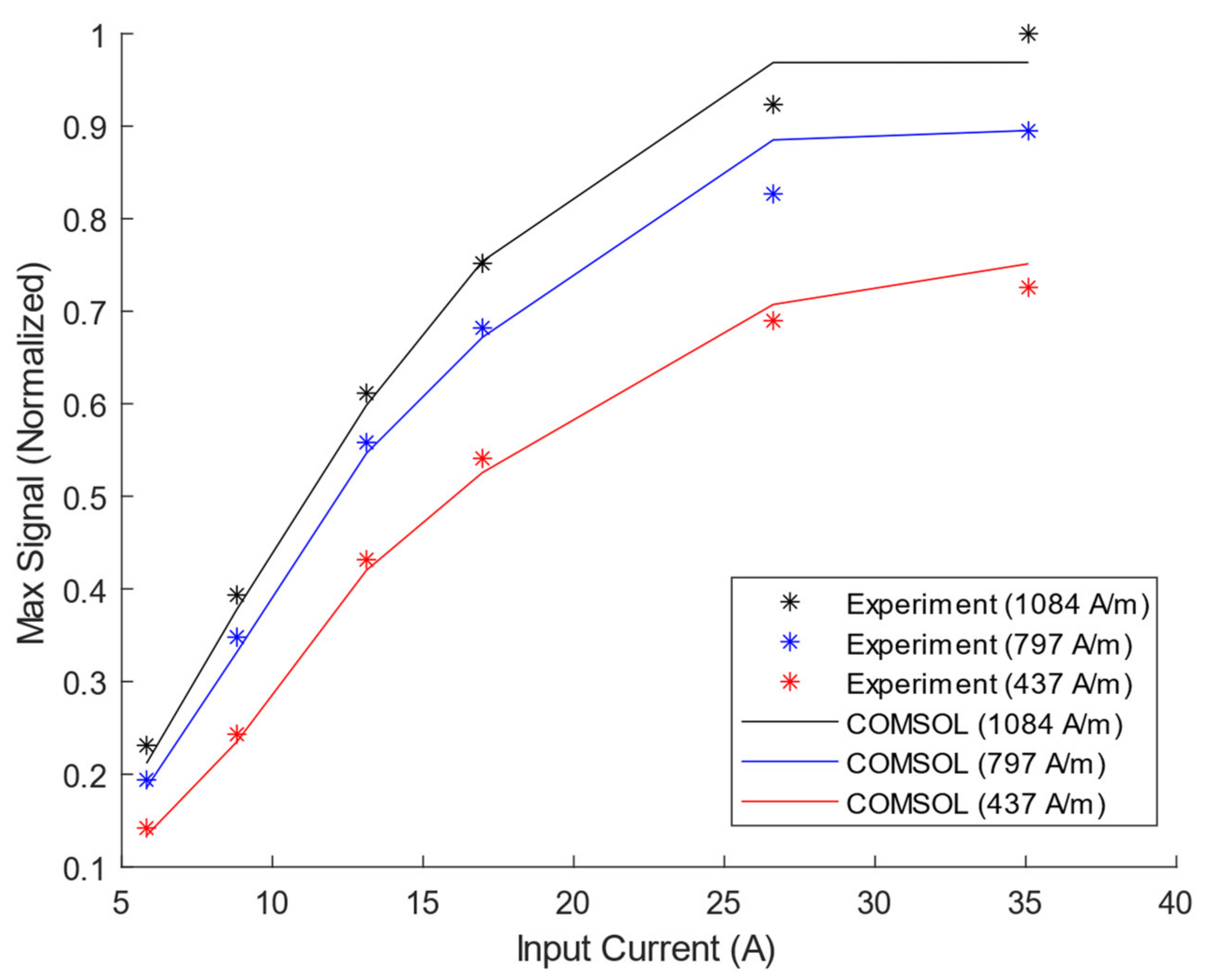
The MS-EMAT experiments are designed to cover the entire range of magnetic field values induced by this study’s PPM EMAT configuration so that the empirical factors for the new magnetostriction model can be determined. Since field measurements inside the plate are not possible, the static field strength on the surface of the plate produced by the PPM is simulated and found to range from 540–820 A/m under the centerline of each row of magnets.
Measurements are made at three values of magnet liftoff to cover this range of static fields with the MS-EMAT transmitter. The horseshoe magnet is much larger than the MS-EMAT coil, generating uniform fields, allowing the use of averaged values within the coil area. Values of the static magnetic field are determined via COMSOL simulation and verified by a Gauss meter in air just above the test plate:
MS-EMAT magnet liftoff = 4.45 mm; associated average static magnetic field = 1084 A/m.
MS-EMAT magnet liftoff = 8.92 mm; associated average static magnetic field = 797 A/m.
MS-EMAT magnet liftoff = 23.68 mm; associated average static magnetic field = 437 A/m.
The maximum static magnetic field variation under the MS-EMAT transmitter within the plate is ±6.5% of the average value for all three liftoff values within the MS-EMAT coil area profile and with depth into the plate.
The PPM EMAT’s input current is five cycles of a sine wave, with average peak currents of 4.8 A, 9.9 A, and 20.5 A. This waveform has a bandwidth of approximately 100 kHz. The maximum dynamic magnetic field produced by the racetrack coil within the plate is determined by COMSOL simulation to range from A/m (4.8 Amperes input current) up to A/m (20.5 Amperes input current). To cover a similar range of field values, the MS-EMAT’s average input current is set to range from 5.8 A ( A/m) to 35.1 A ( A/m) for each of the three values of static field Measurements and COMSOL simulations are then made for three EMAT system configurations:
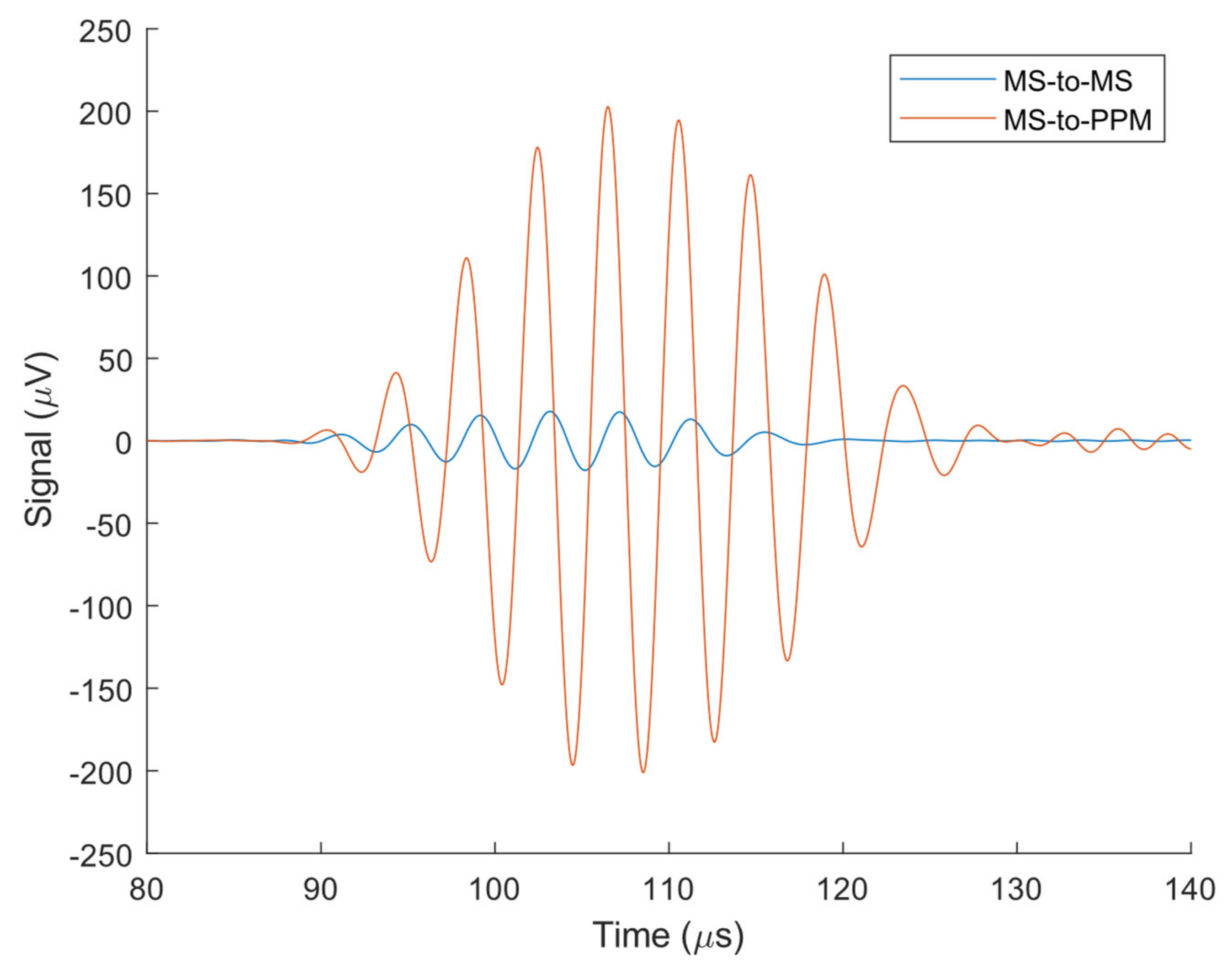
PPM EMAT transmitter to PPM EMAT receiver (PPM-to-PPM)
MS-EMAT transmitter to PPM EMAT receiver (MS-to-PPM)
one MS-EMAT transmitter to MS-EMAT receiver (MS-to-MS) experiment
Each EMAT configuration must be run on the exact same steel footprint to avoid the effects of non-homogeneities in the steel sample. Temporal signal averaging produced a very stable and repeatable output waveform. A typical experimental setup is shown in
Figure 10.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}