
Actuator Fault Detection for Unmanned Ground Vehicles Considering Friction Coefficients

Abstract
:1. Introduction
2. Dynamics of Vehicles with Four Mecanum Wheels
3. Actuator Fault Detection
3.1. Fault Detector Design
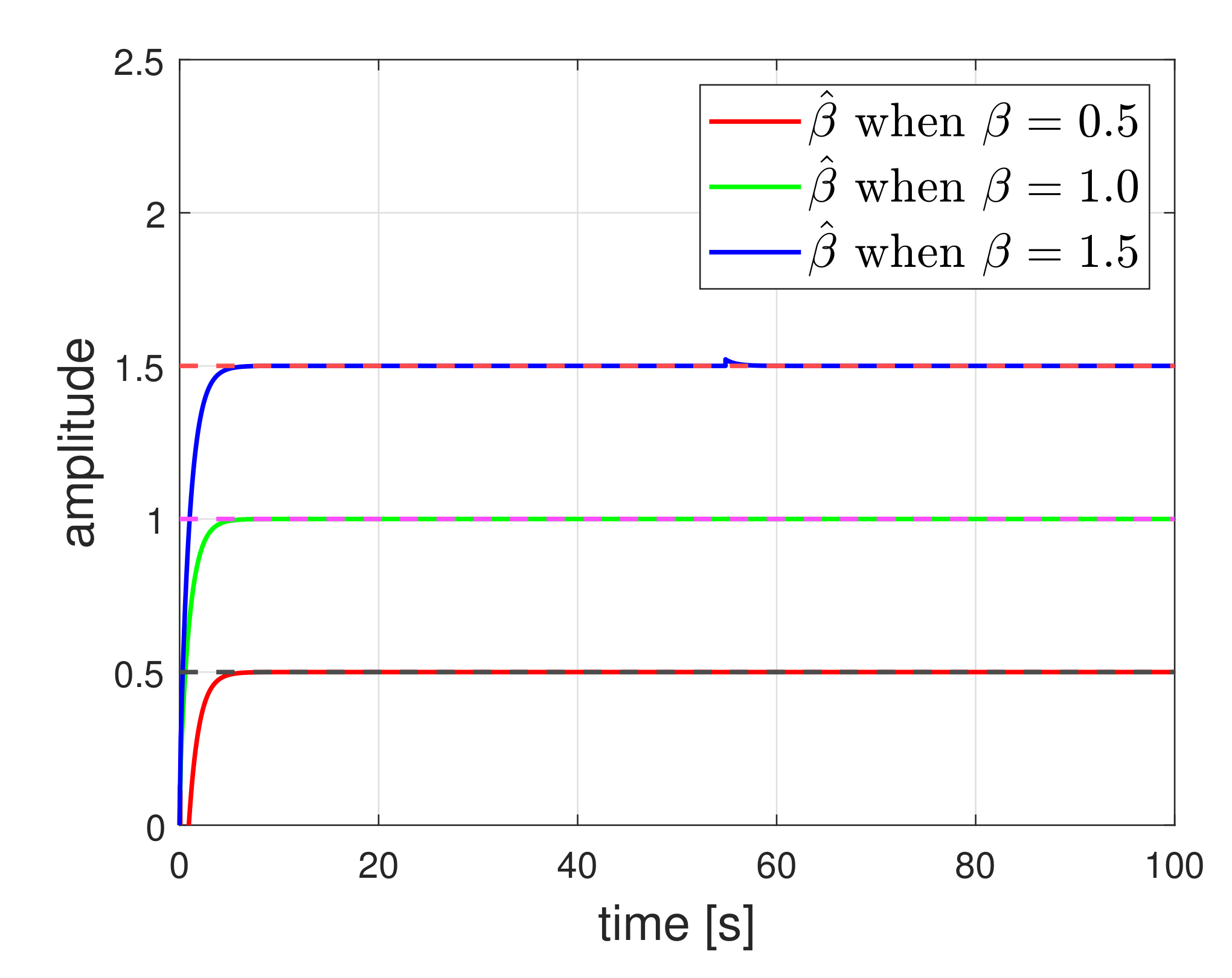
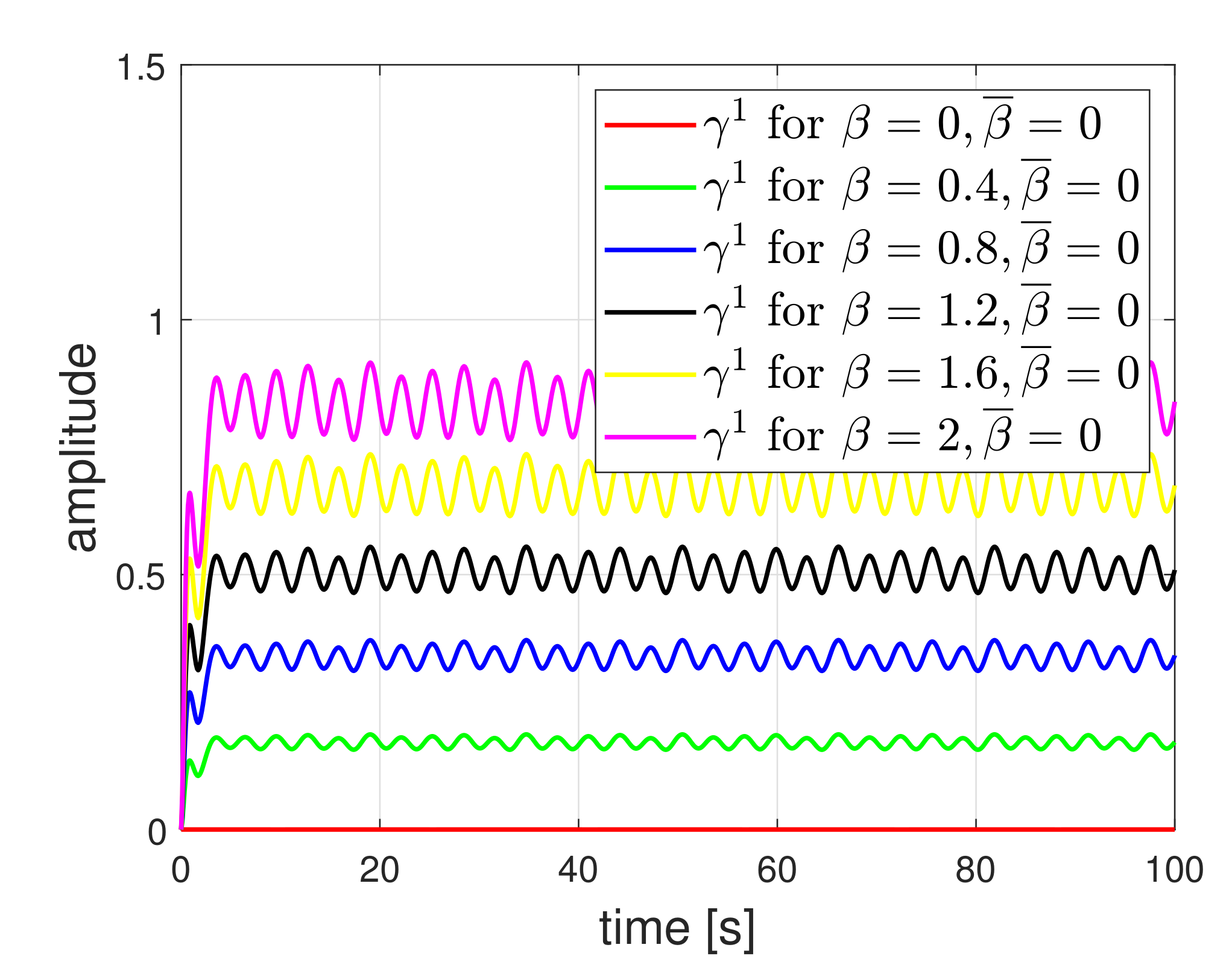
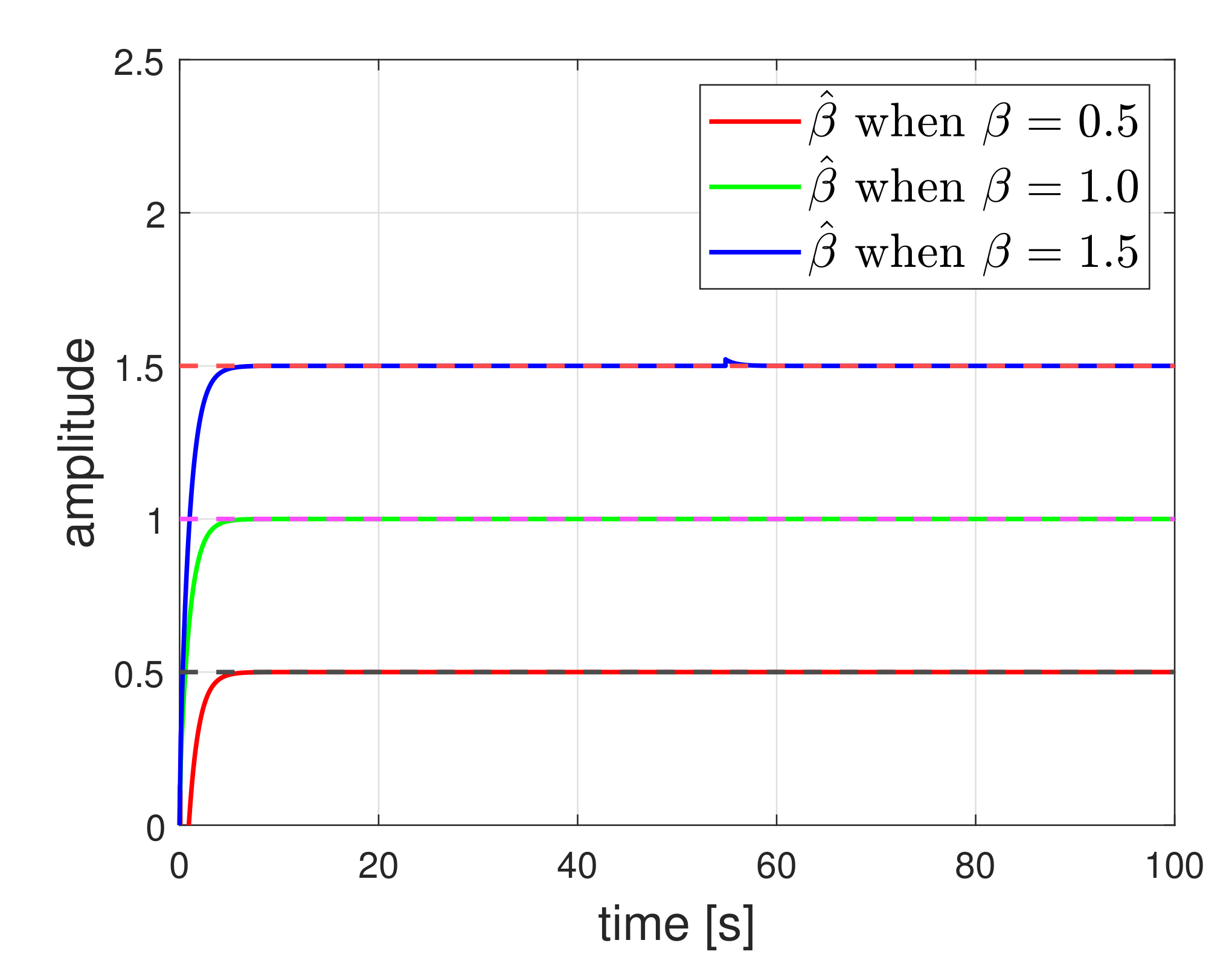
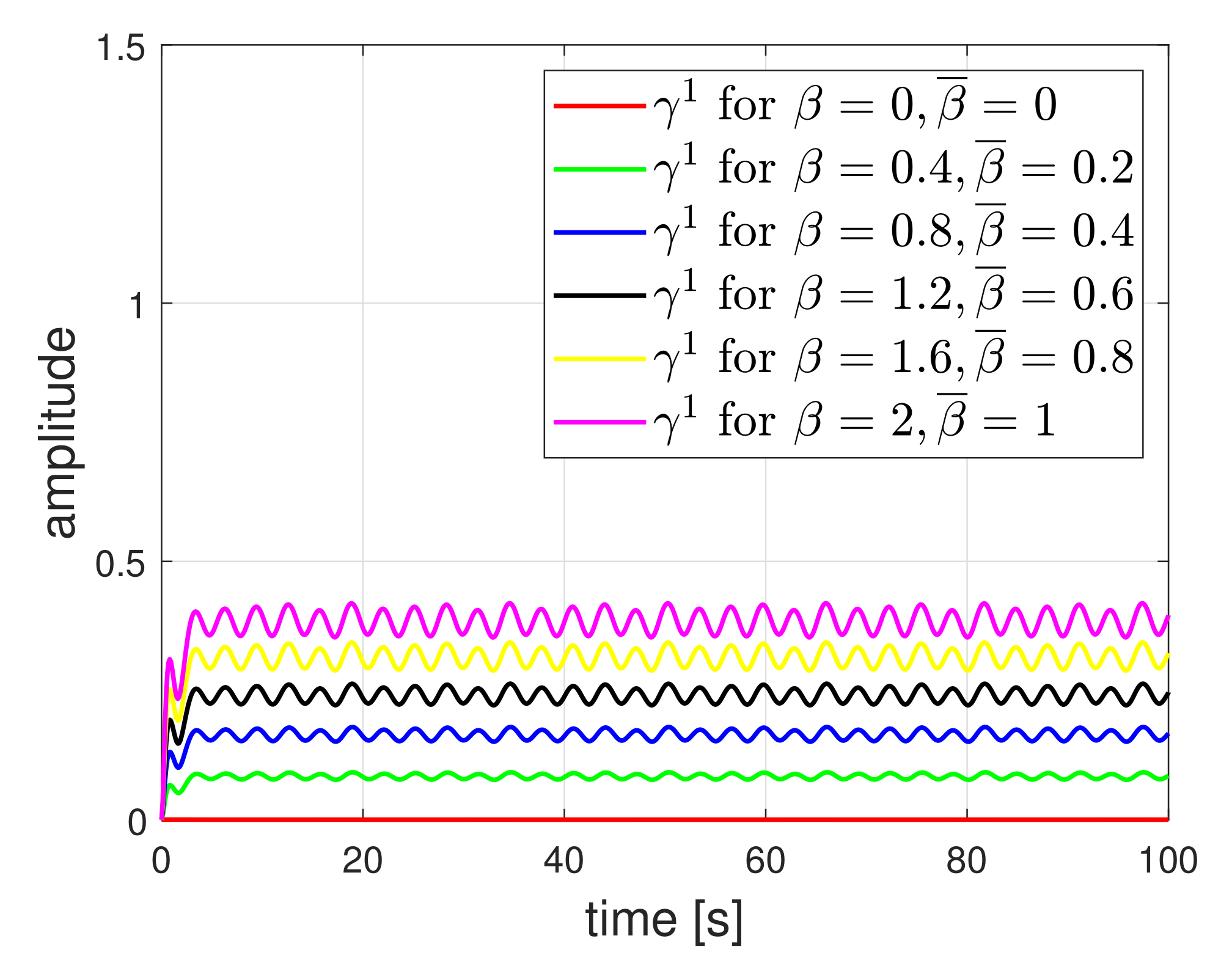
3.2. Discussion on Friction Coefficient Estimation
4. Simulation Results
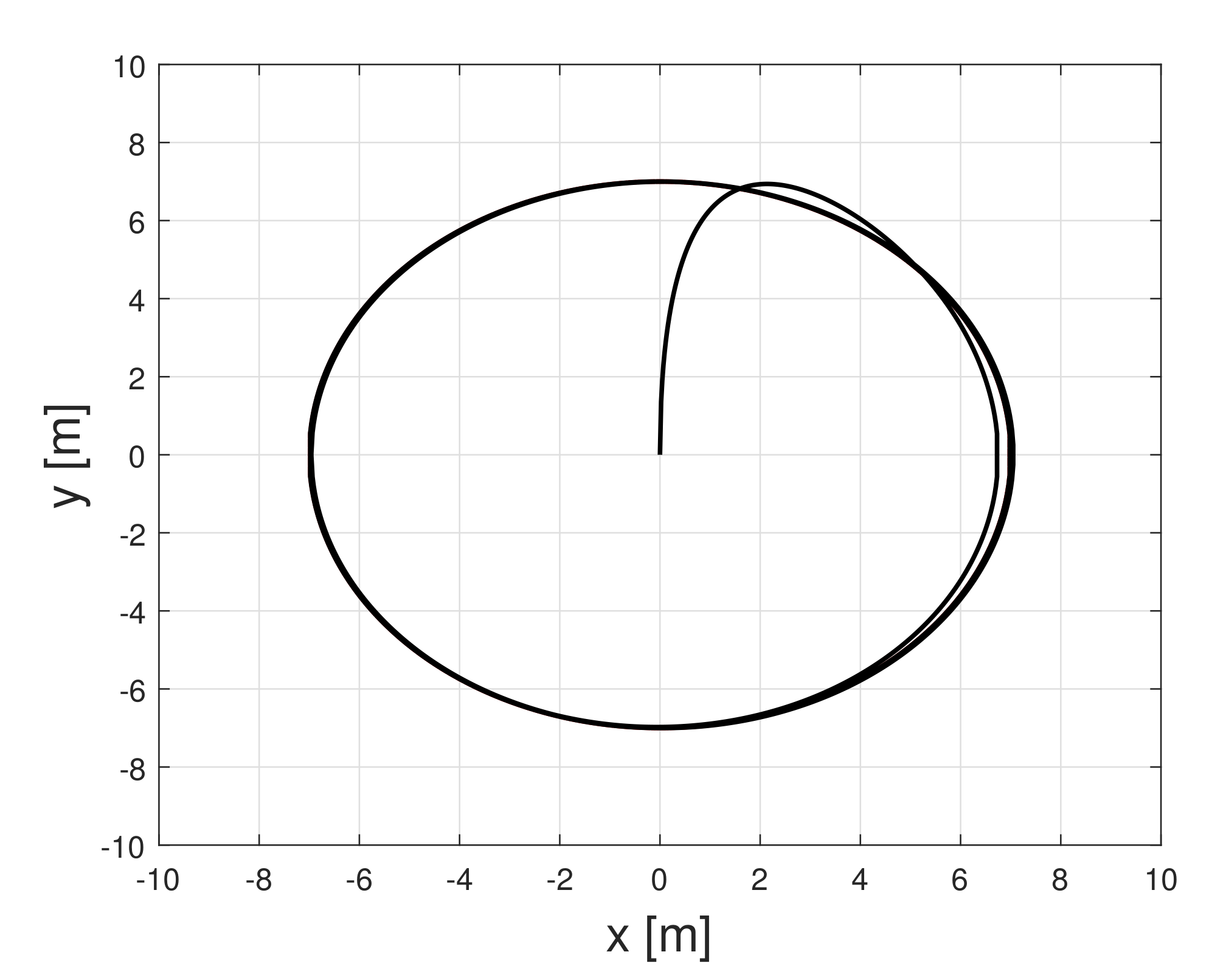
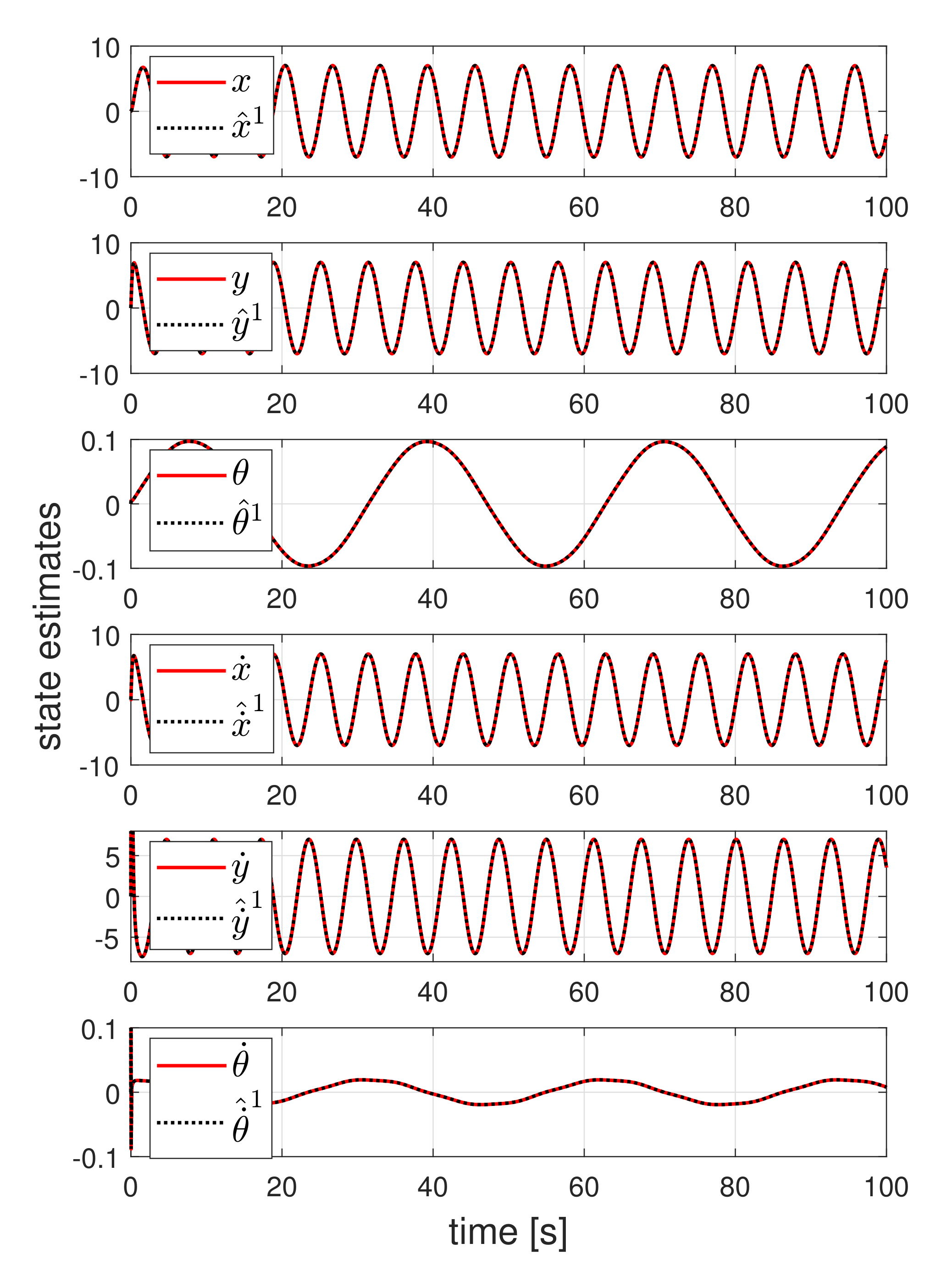
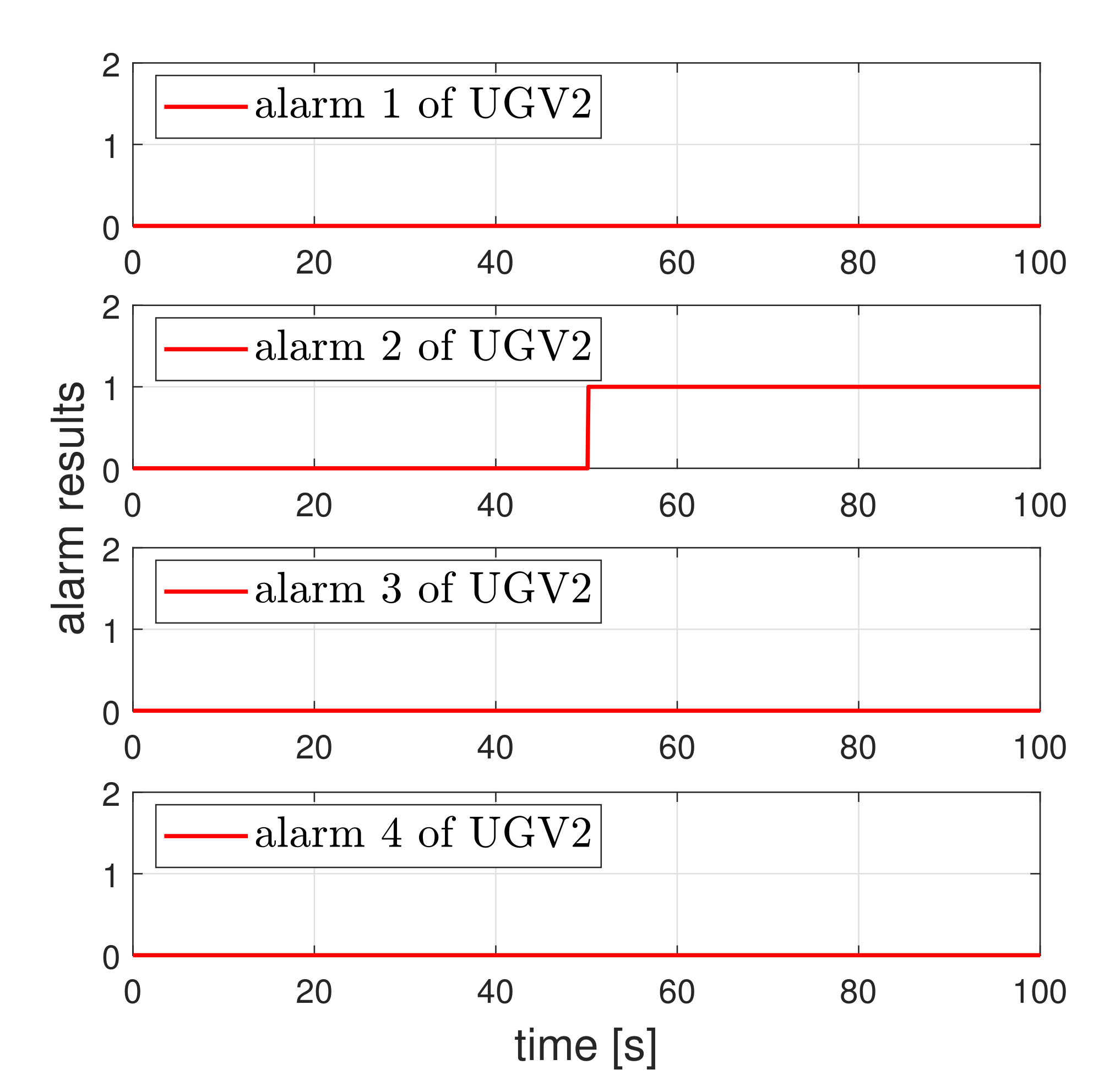
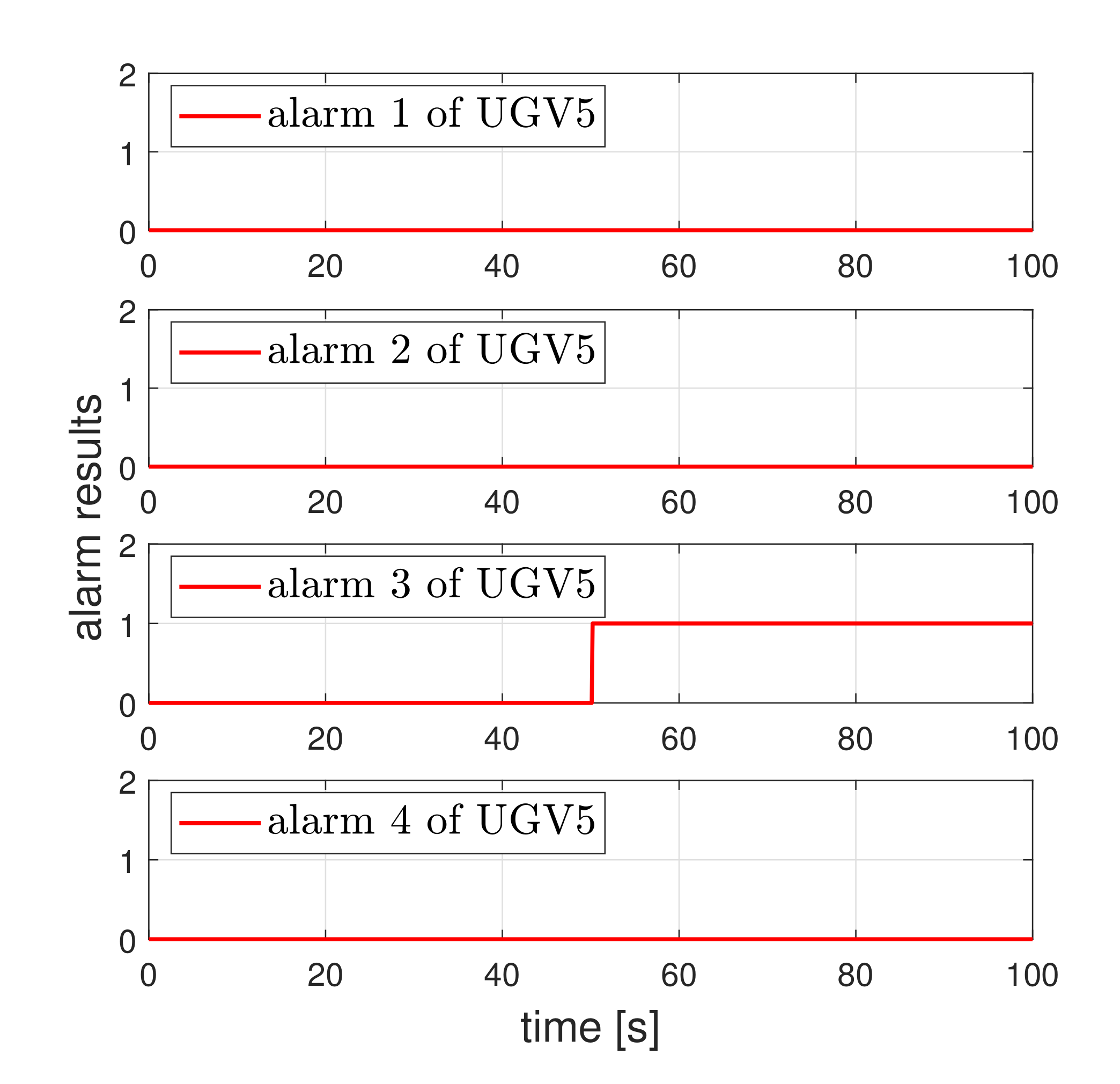
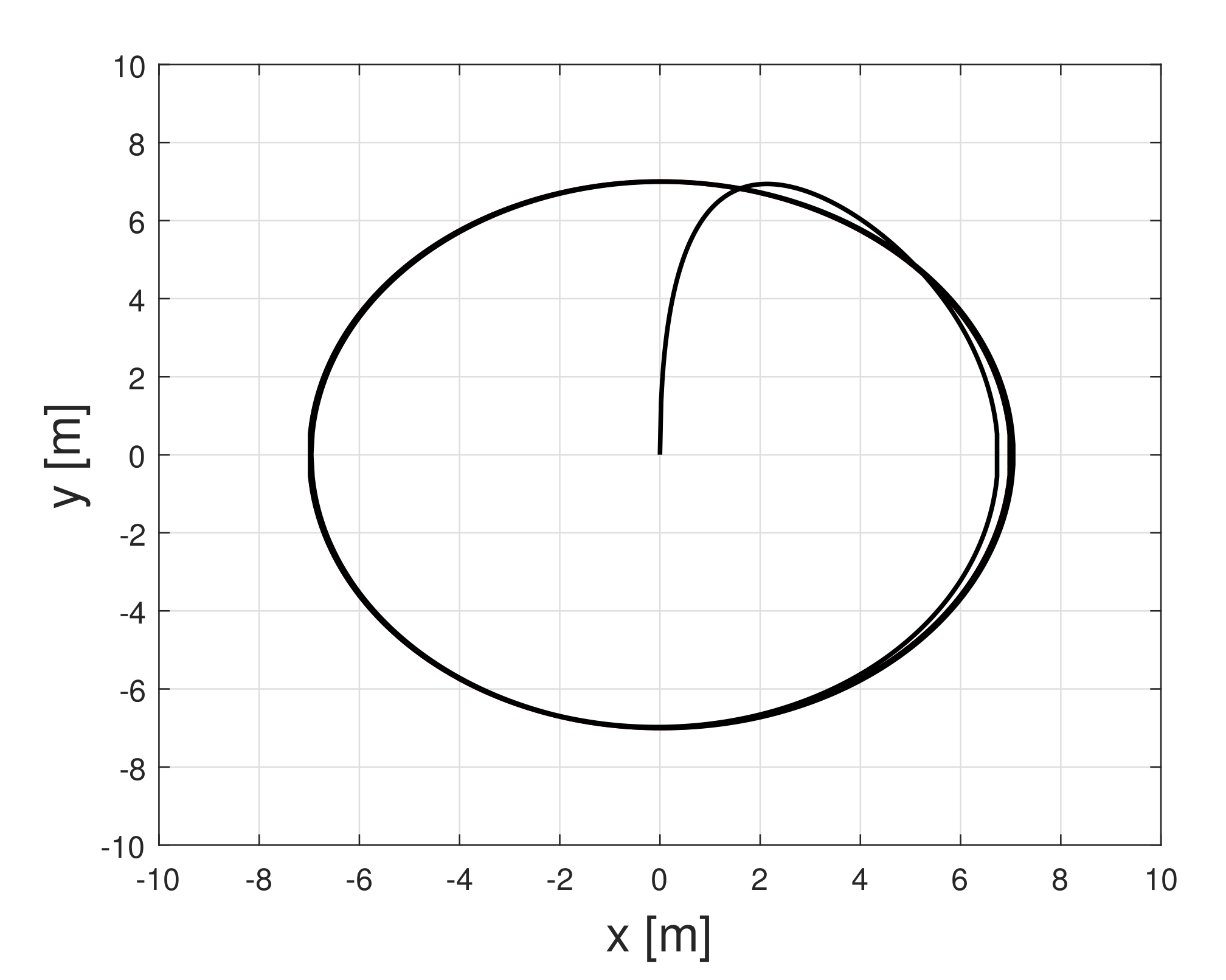
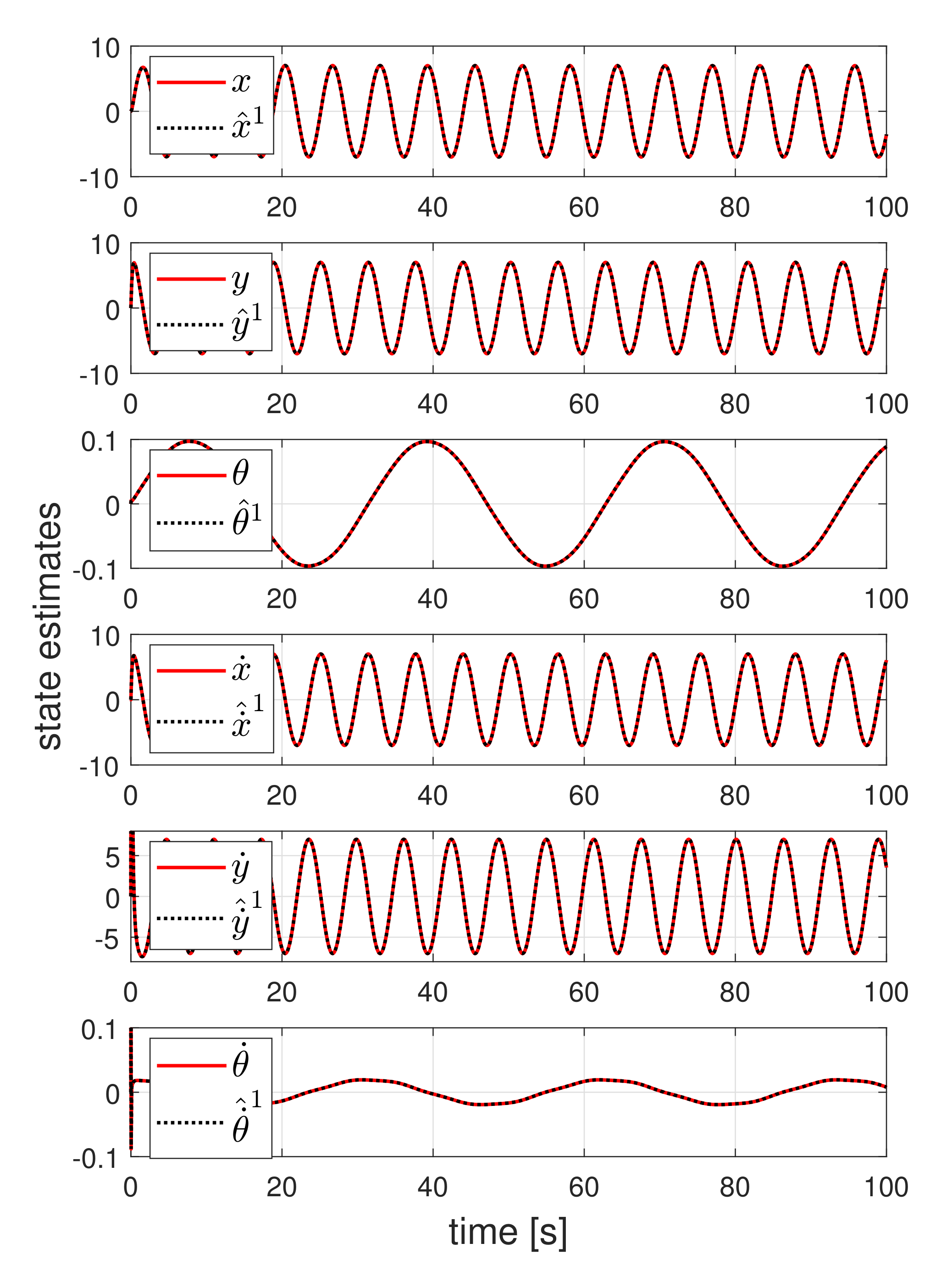
4.1. Actuator Fault Detection of Individual UGV
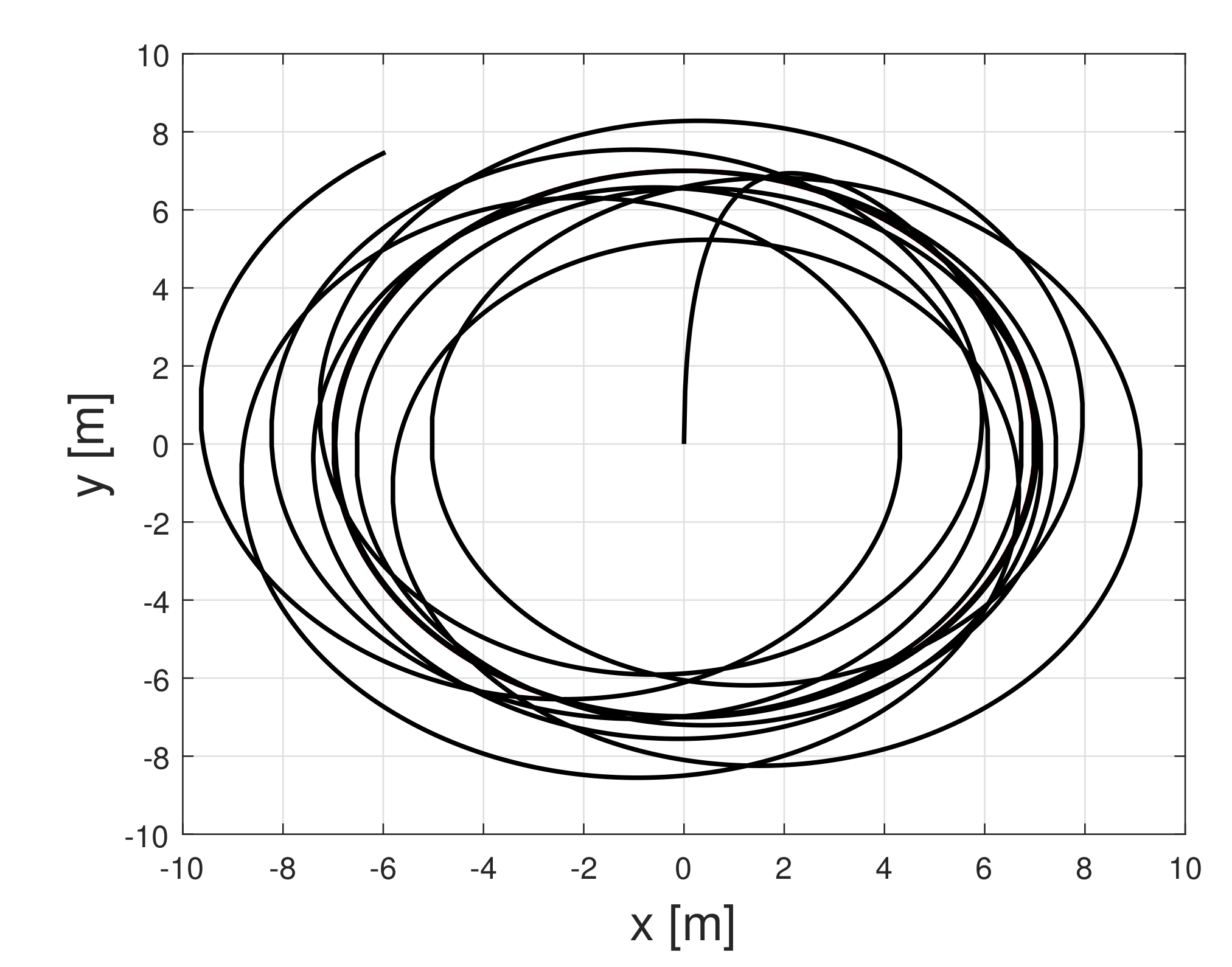
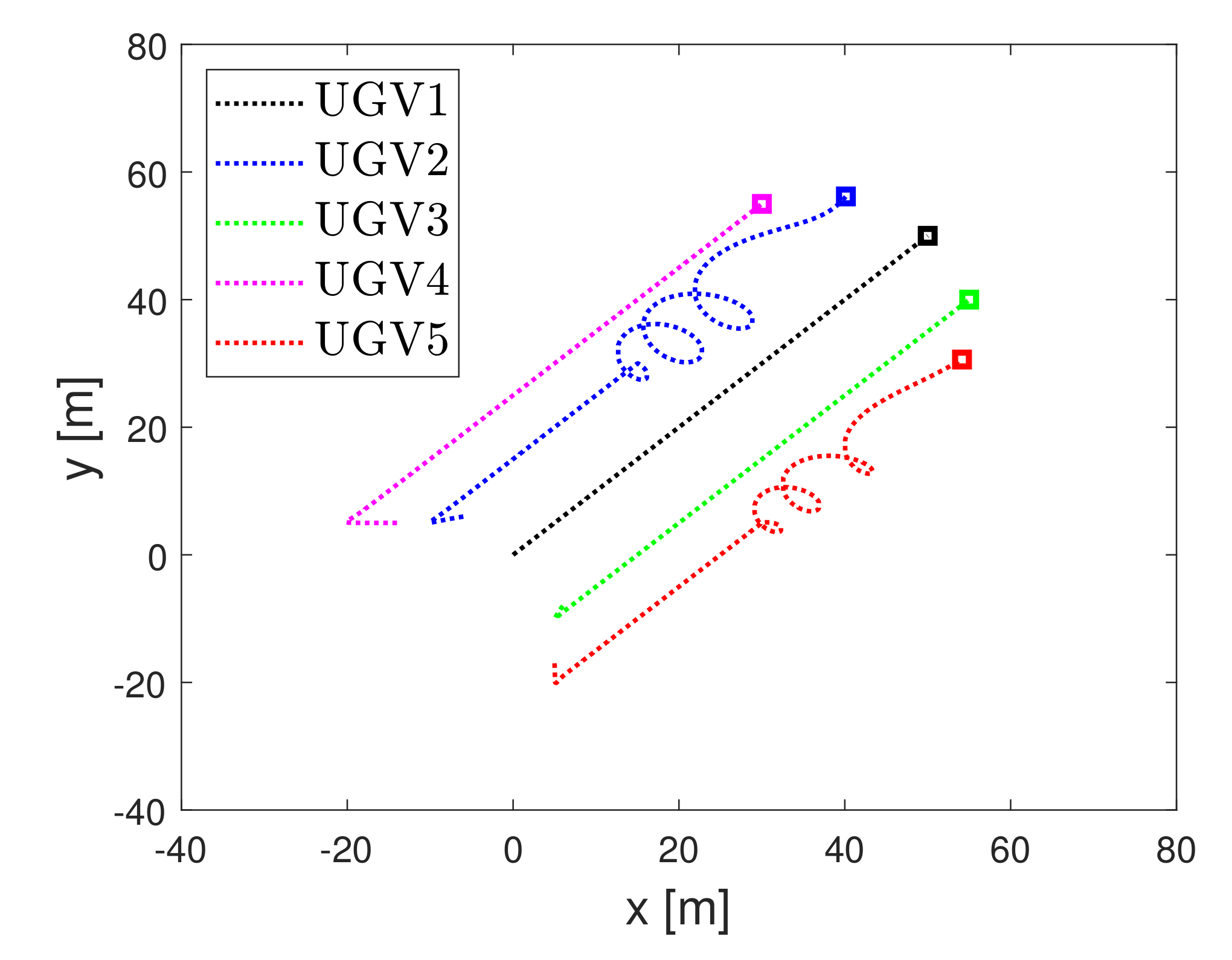
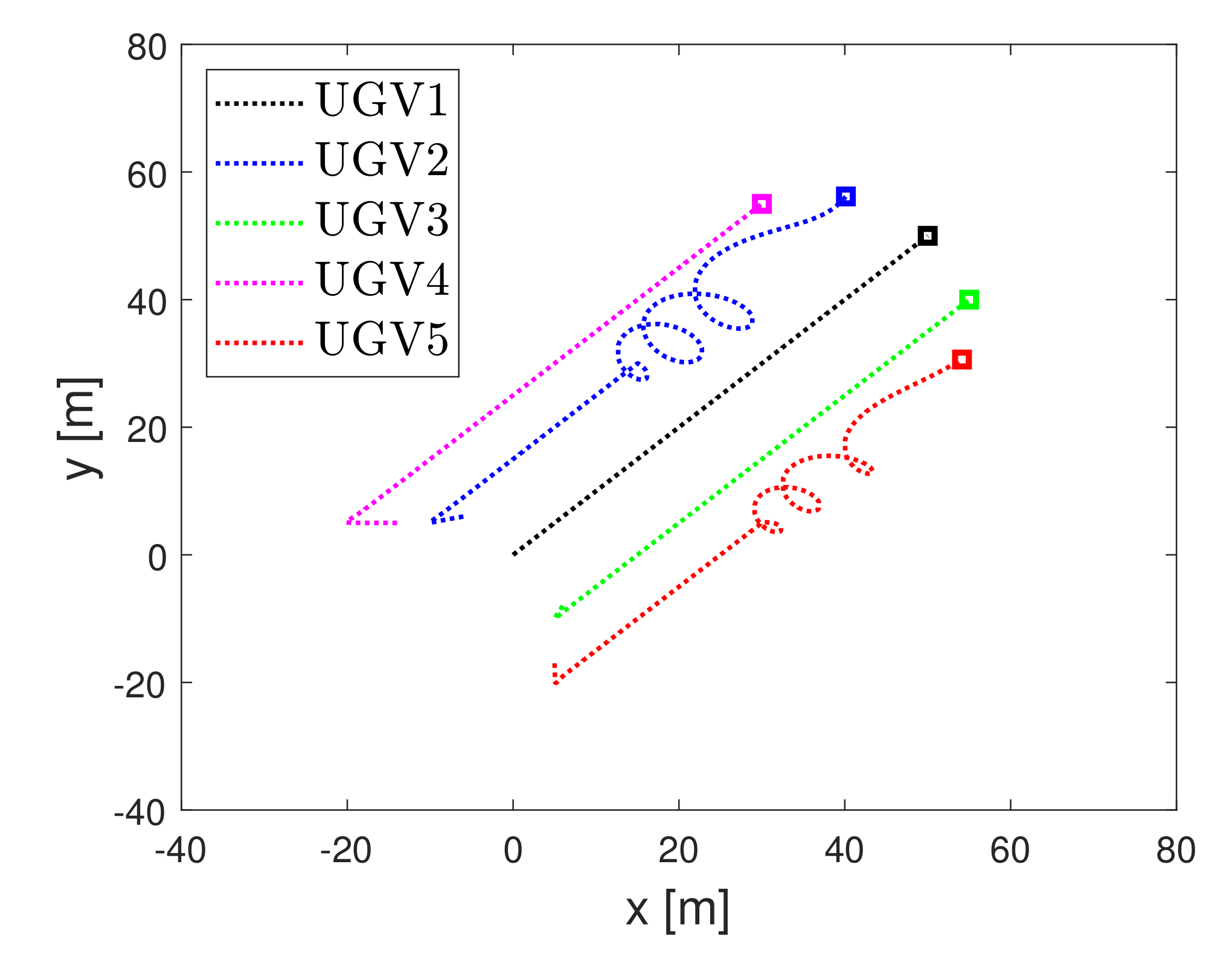
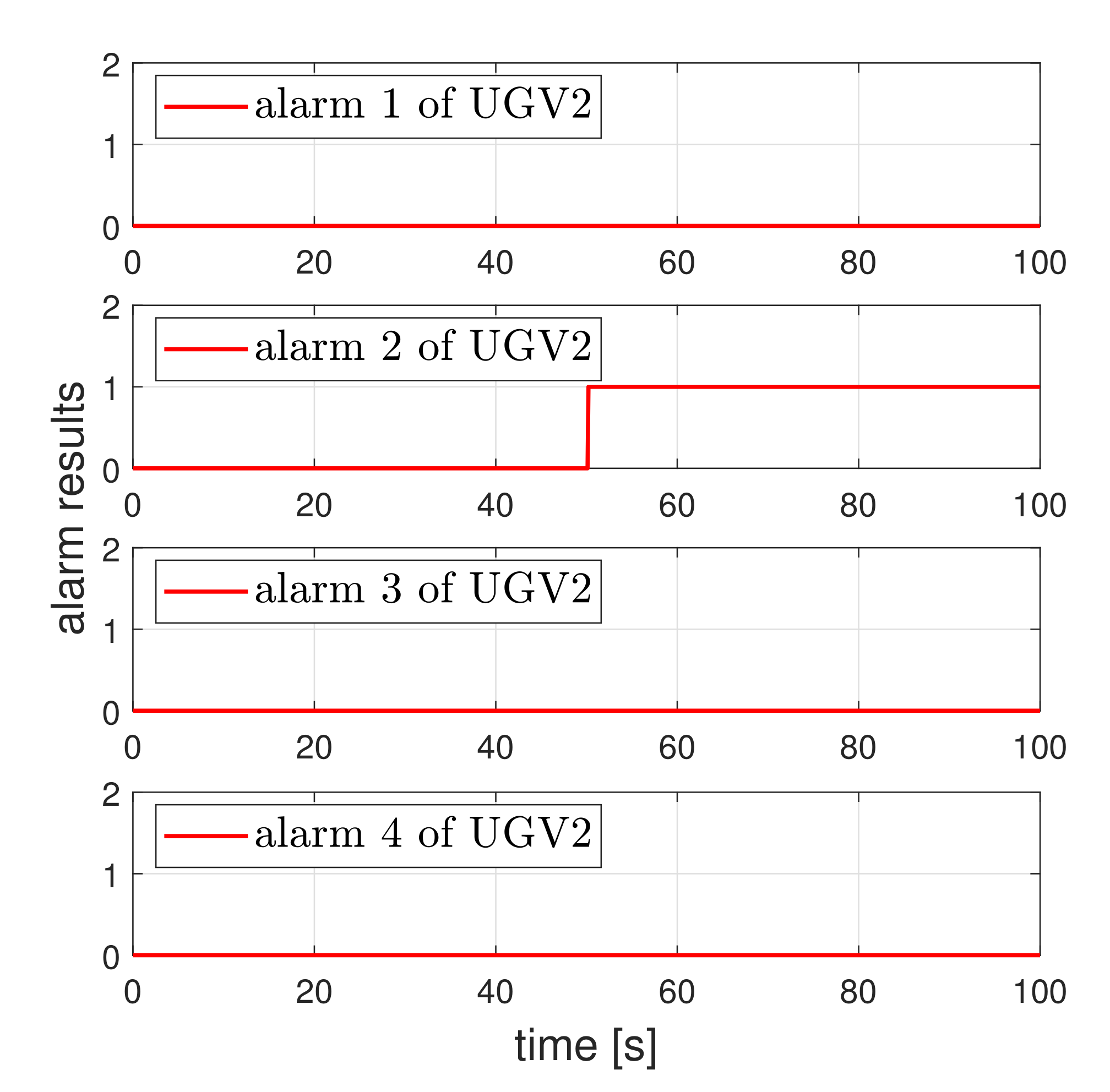
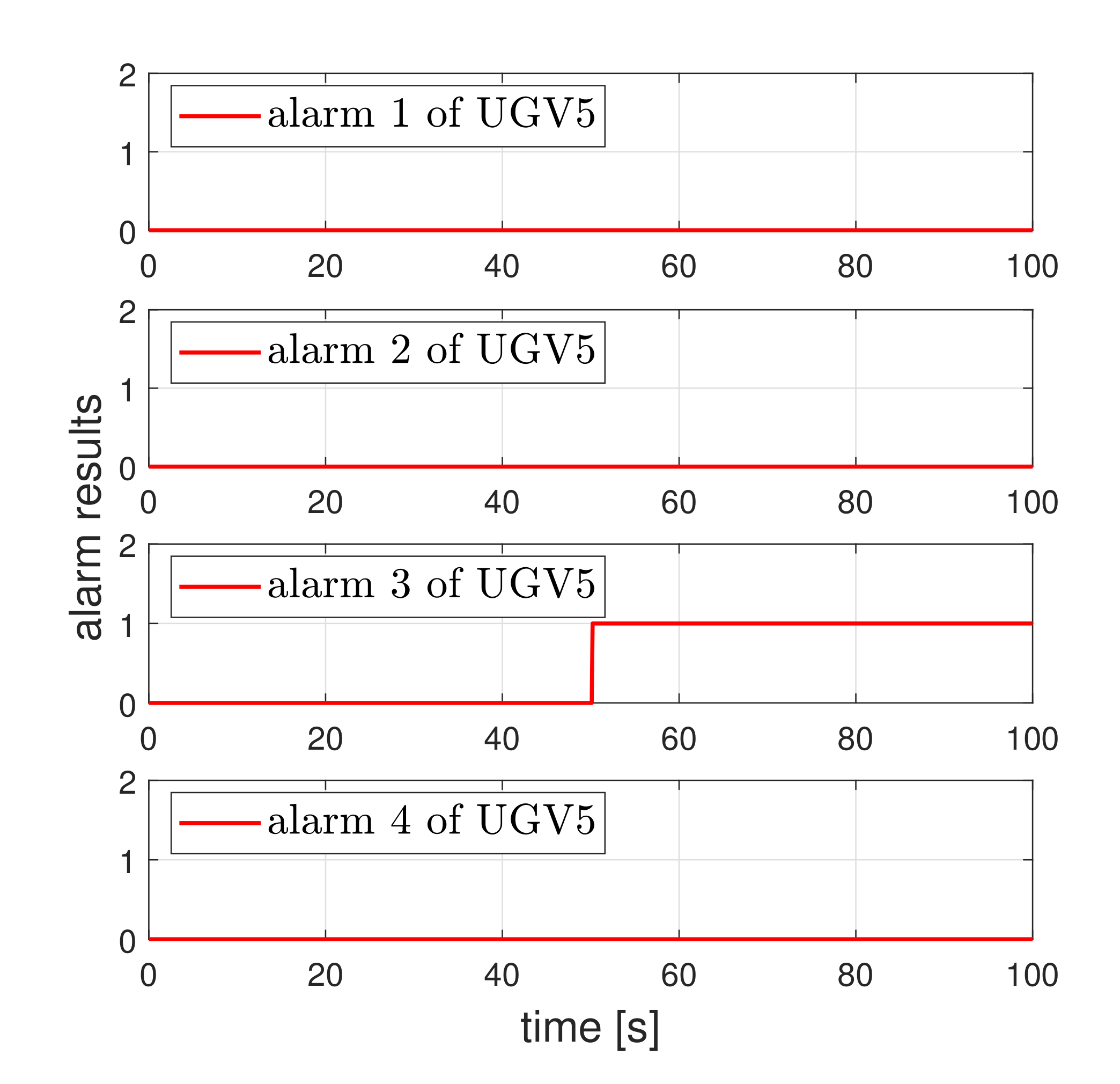
4.2. Performance Evaluation under Swarm Scenario
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Tian, J.; Chen, Y.; Jaakkola, A.; Liu, J.; Hyyppa, J.; Hyyppa, H. NAVIS-An UGV indoor positioning system using laser scan matching for large-area real-time applications. Sensors 2014, 14, 11805–11824. [Google Scholar]
- Zhang, K.; Yan, Y.; Fu, M.; Wang, M. Traversability assessment and trajectory planning of unmanned ground vehicles with suspnesion systems on rough terrain. Sensors 2019, 19, 4372. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nielsen, C.W.; Goodrich, M.A.; Rick, R.W. Ecological interfaces for improving mobile robot teleoperation. IEEE Trans. Robot. 2007, 23, 927–941. [Google Scholar] [CrossRef] [Green Version]
- Olmedo, N.A.; Fisseha, B.; Wilson, W.; Barczyk, M.; Zhang, H.; Lipsett, M.G. An automated vane shear test tool for environmental monitoring with unmanned ground vehicle. J. Terramech. 2020, 91, 53–63. [Google Scholar] [CrossRef]
- Zhang, T. UGV development in 2020–2030 in terms of technologies. In Digital Infantry Battlefield Solution, Introduction to Ground Robotics, DIBS Project, Part One; Latvian Institute of International Affairs: Latvia, Riga, 2016. [Google Scholar]
- Harik, E.H.C.; Guerin, F.; Guinand, F.; Brethe, J.F.; Pelvillain, H. UAV-UGV cooperation for objects trasportation in an industrial area. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT 2015), Seville, Spain, 17–19 March 2015; pp. 547–552. [Google Scholar]
- Quaglia, G.; Cavallone, P.; Visconte, C. Agriq: Agriculture UGV for monitoring and drone landing. J. Mech. Robot. 2018, 66, 413–423. [Google Scholar]
- Toth, F.; Krasnansky, P.; Gulan, M.; Ilkiv, B.R. Control systems in omni-directional robotic vehicle with mecanum wheels. In Proceedings of the International Conference on Process Control (PC 2013), Strbske Pleso, Slovakia, 18–21 June 2013; pp. 516–521. [Google Scholar]
- Wikipedia. Available online: https://en.wikipedia.org/wiki/Mecanum_wheel (accessed on 17 November 2021).
- Peng, T.; Qian, J.; Zi, B.; Liu, J.; Wang, X. Mechanical design and control system of an omni-directional mobile robot for material conveying. Procedia CIRP 2016, 56, 412–415. [Google Scholar] [CrossRef] [Green Version]
- Mellah, S.; Graton, G.; Adel, E.; Ouladsine, M.; Planchais, A. 4-mechanum wheeled mobile robot actuator fault detection and isolation using unknown input observer based approach. In Proceedings of the European Control Conference (ECC 2020), St. Petersburg, Russia, 12–15 May 2020; pp. 1442–1447. [Google Scholar]
- Sahoo, S.R.; Chiddarwar, S.S.; Alakshendra, V. Intuitive dynamic modeling and flatness-based nonlinear control of a mobile robot. IEEE Trans. Ind. Electron. 2017, 94, 797–820. [Google Scholar] [CrossRef]
- Rajamani, R.; Phanomchoeng, G.; Piyabongkarn, D.; Lew, J.Y. Algorithms for real-time estimation of individual wheel tire road friction coefficients. IEEE ASME Trans. Mechatron. 2012, 17, 1183–1195. [Google Scholar] [CrossRef]
- Hu, J.; Rakheja, S.; Zhang, Y. Tire-road friction coefficient estimation under constant vehicle speed control. IFAC-PapersOnLine 2019, 52, 136–141. [Google Scholar] [CrossRef]
- Kim, J.; Lee, J. Real-time estimation of maximum friction and optimal slip ratio based on material identification for a mobile robot on rough terrain. In Proceedings of the International Conference on Control, Automation and Systems (ICCAS 2013), Gwangju, Korea, 20–23 October 2013; pp. 1708–1713. [Google Scholar]
- Fourlas, G.K.; Karkanis, S.; Karras, G.C.; Kyriakopoulos, K.J. Model based actuator fault diagnosis for a mobile robot. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT 2014), Busan, Korea, 26 February–1 March 2014; pp. 79–84. [Google Scholar]
- Roumeliotis, S.I.; Sukhatme, G.S.; Bekey, G.A. Fault detection and identification in a mobile robot using multiple-model estimation. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 1998), San Francisco, CA, USA, 16–20 May 1998; pp. 2223–2228. [Google Scholar]
- Halder, B.; Sarkar, N. Robust nonlinear analytic redundancy for fault detection and isolation in mobile robot. Int. J. Autom. Comput. 2007, 4, 177–182. [Google Scholar] [CrossRef]
- Dixon, W.E.; Walker, I.D.; Dawson, D.M. Fault detection for wheeled mobile robots with parametric uncertainty. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics Proceedings, Como, Italy, 8–12 July 2001; pp. 1245–1250. [Google Scholar]
- Yazdjerdi, P.; Meskin, N. Actuaotor fault detection and isolation of differential drive mobile robots using multiple model algorithm. In Proceedings of the 2017 4th International Conference on Control, Decision and Information Technologies (CoDIT 2017), Barcelona, Spain, 5–7 April 2017; pp. 439–443. [Google Scholar]
- Ihalal, D.; Marx, B.; Ragot, J.; Maquin, D. Unknown input observer for LPV systems with parameter varying output equation. IFAC-PapersOnLine 2015, 48, 1030–1035. [Google Scholar] [CrossRef]
- Marx, B.; Ihalal, D.; Ragot, J.; Maquin, D.; Mammar, S. Unknown input observer for LPV systems. Automatica 2019, 100, 67–74. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| vehicle state | friction coefficient | ||
| motor torques | varying parameters | , | |
| motor fault signals | w | UGV constant | h |
| global position | x, y | wheel radius | R |
| yaw angle | vehicle width | ||
| vehicle mass | m | vehicle length | |
| yaw moment of inertia | I | gravity acceleration | g |
| F | T | T | T | |
| T | F | T | T | |
| T | T | F | T | |
| T | T | T | F |
| vehicle mass | m | 6 |
| yaw moment of inertia | I | |
| wheel radius | R | |
| vehicle width | ||
| vehicle length | ||
| acceleration due to gravity | g | |
| friction coefficient | ||
| nominal friction coefficient | ||
| threshold value | ||
| maximum of yaw rate | 3 | |
| maximum of friction coefficient | 2 | |
| proportional control gain | ||
| integral control gain | ||
| derivative control gain |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Na, G.; Eun, Y. Actuator Fault Detection for Unmanned Ground Vehicles Considering Friction Coefficients. Sensors 2021, 21, 7674. https://doi.org/10.3390/s21227674
Na G, Eun Y. Actuator Fault Detection for Unmanned Ground Vehicles Considering Friction Coefficients. Sensors. 2021; 21(22):7674. https://doi.org/10.3390/s21227674
Chicago/Turabian StyleNa, Gyujin, and Yongsoon Eun. 2021. "Actuator Fault Detection for Unmanned Ground Vehicles Considering Friction Coefficients" Sensors 21, no. 22: 7674. https://doi.org/10.3390/s21227674
APA StyleNa, G., & Eun, Y. (2021). Actuator Fault Detection for Unmanned Ground Vehicles Considering Friction Coefficients. Sensors, 21(22), 7674. https://doi.org/10.3390/s21227674