
Data-Driven Anomaly Detection in High-Voltage Transformer Bushings with LSTM Auto-Encoder



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. High-Voltage Bushing Overview
3. Materials and Methods
3.1. Recurrent Neural Network (RNN)
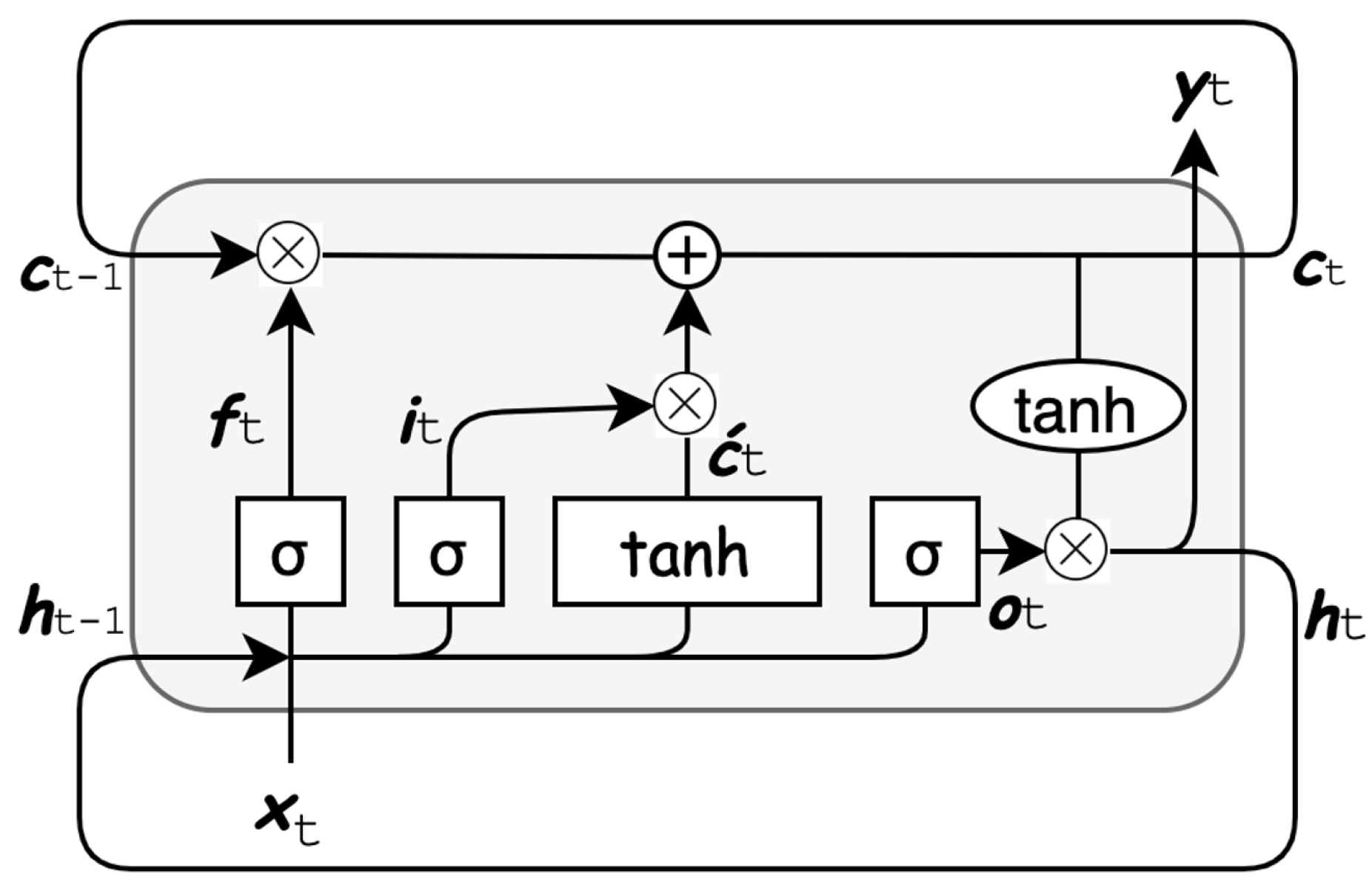
3.2. Long Short-Term Memory (LSTM)
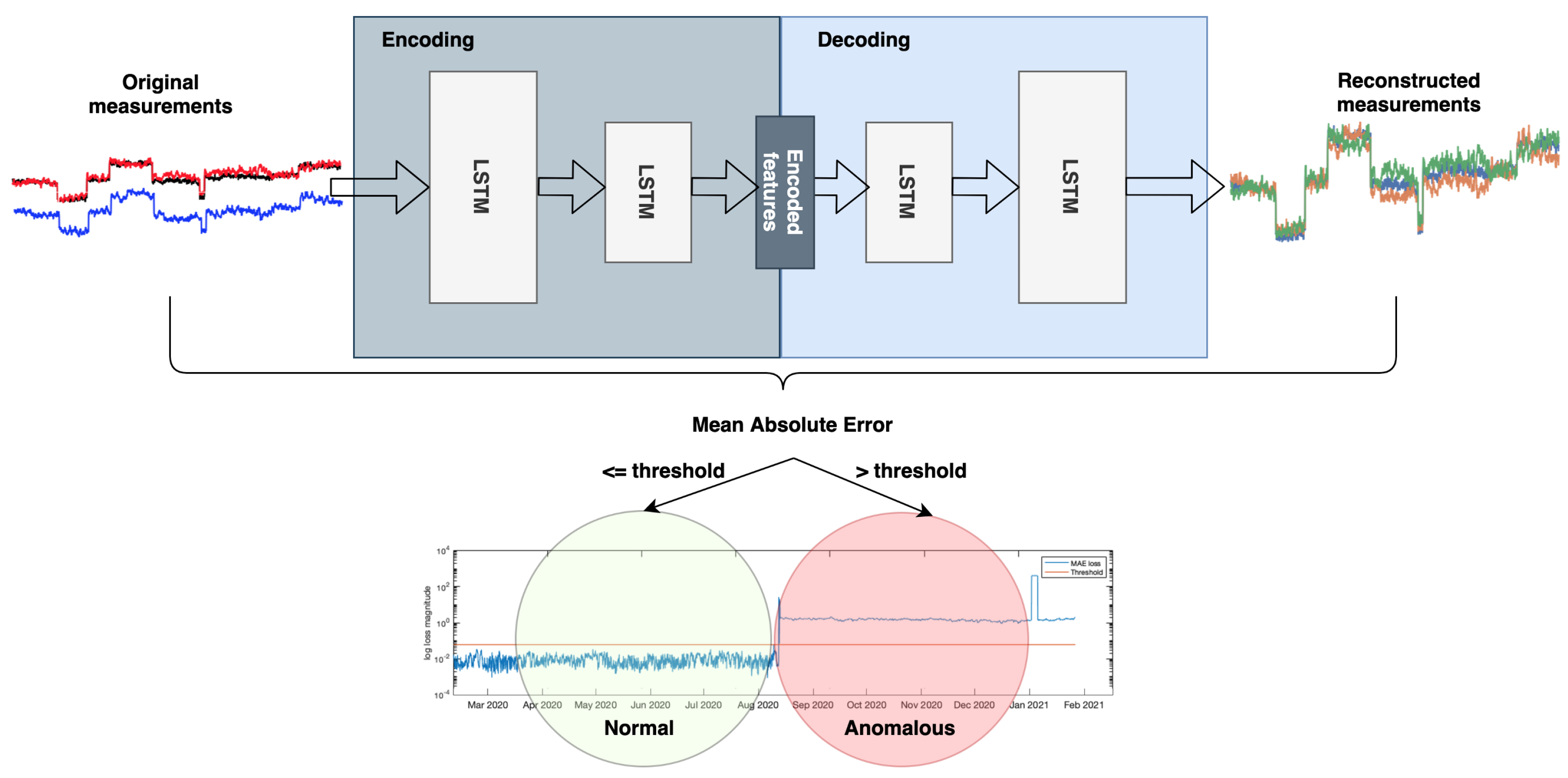
3.3. Long Short-Term Memory Auto-Encoder (LSTMAE)
3.4. Anomalous Event Decision
- Train the LSTMAE model by reducing the MAE loss;
- Once the training has converged, calculate the MAE loss for each time step and fit to a distribution;
- Derive the threshold for normal/anomaly as the boundary of the MAE score distribution calculated on the training data.
- Input the time series to the LSTMAE model and derive the reconstructed version from the decoder;
- Calculate the MAE between the original input time series and its reconstructed version;
- Compare MAE score with the derived threshold for anomaly detection.
4. Results and Discussion
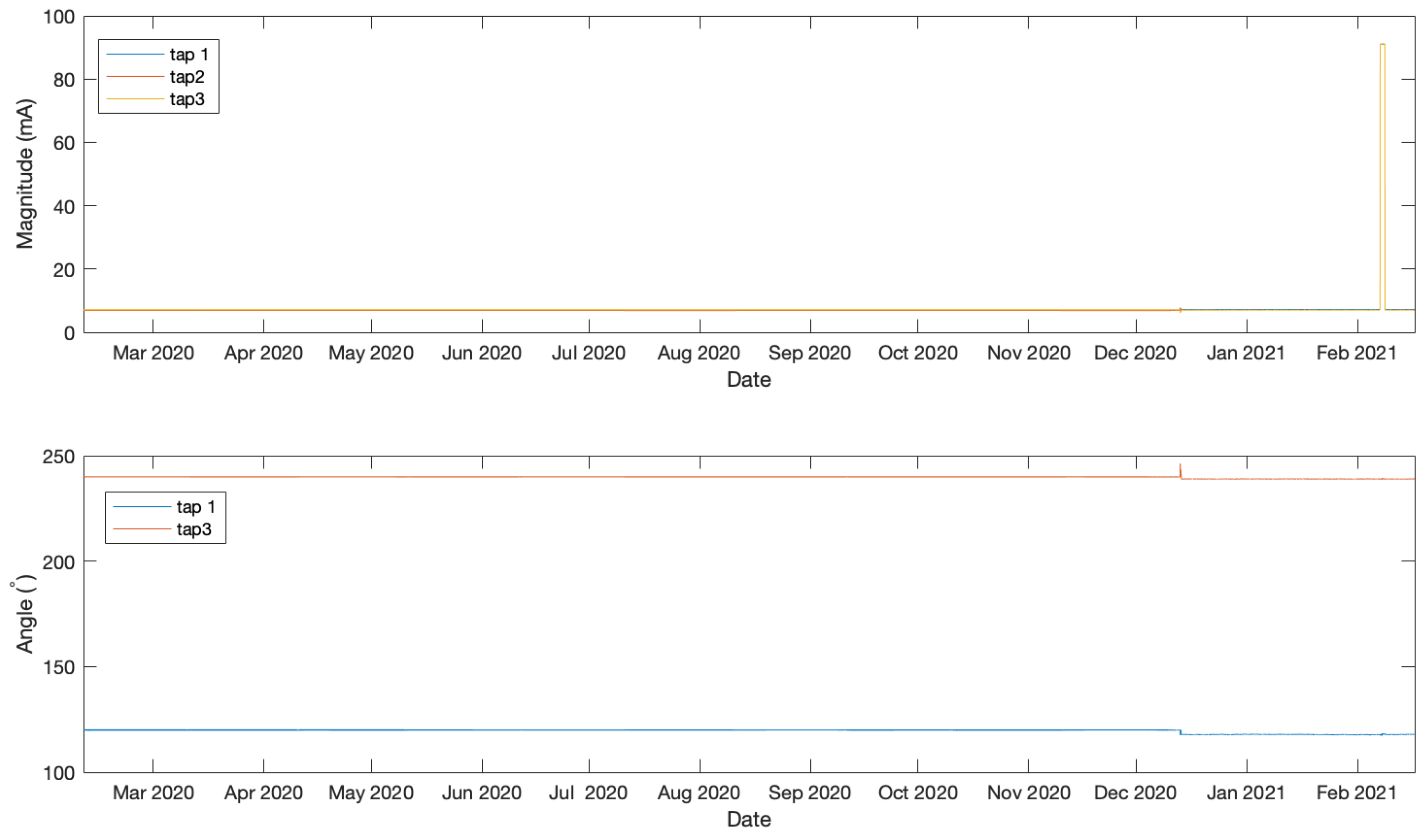
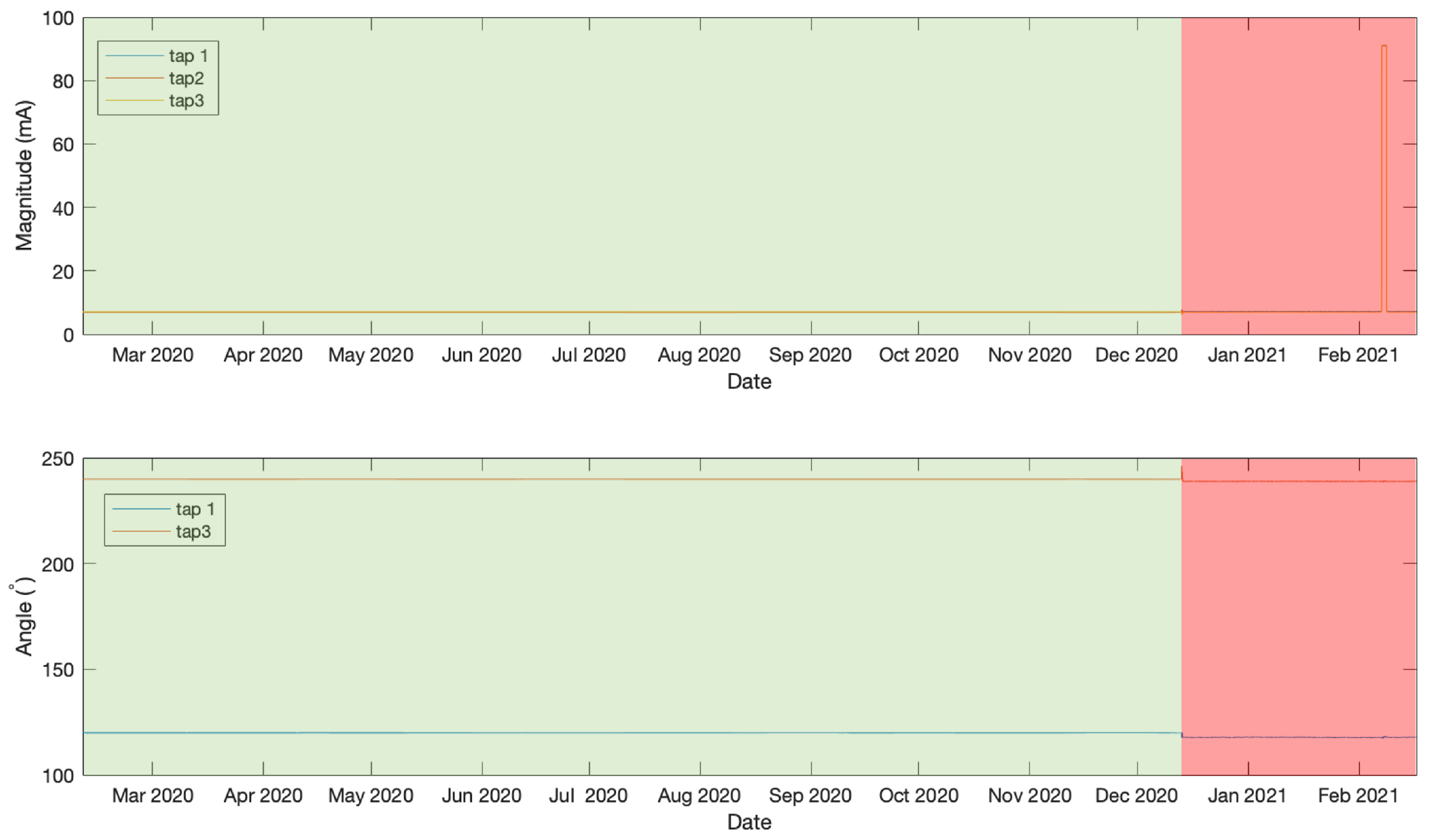
4.1. Bushing Data Measurement
4.2. Experiment 1
4.3. Experiment 2
4.4. Comparison to Other Methods
4.4.1. Autoregressive Models
4.4.2. Distance and Clustering Models
4.4.3. Moving Average Method
4.5. Further Remarks
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| HV | High-Voltage |
| LOF | Local Outlier Factor |
| LSTM | Long Short-Term Memory |
| LSTMAE | Long Short-Term Memory Auto-Encoder |
| MAE | Mean Absolute Error |
| ML | Machine Learning |
| NOF | Natural Outlier Function |
| RMS | Root Mean Square |
| RNN | Recurrent Neural Network |
| SARIMA | Seasonal Autoregressive Integrated Moving Average |
| VAR | Vector Autoregressive |
References
- Krzysztof, W.; Jaroslaw, G. Temperature Distribution in the Insulation System of Condenser-Type HV Bushing-Its Effect on Dielectric Response in the Frequency Domain. Energies 2021, 14, 4016. [Google Scholar] [CrossRef]
- Marques, A.P.; de Jesus Ribeiro, C.; Azevedo, C.H.B.; Lopes dos Santos, J.A.; de Carvalho Sousa, F.R.; da Cunha Brito, L. Power Transformer Disruptions—A Case Study. IEEE Electr. Insul. Mag. 2014, 30, 17–21. [Google Scholar] [CrossRef]
- Subocz, J.; Mrozik, A.; Bohatyrewicz, P.; Zenker, M. Condition Assessment of HV Bushings with Solid Insulation based on the SVM and the FDS Methods. Energies 2020, 13, 853. [Google Scholar] [CrossRef] [Green Version]
- Kumar, M.; Rao, M.M. Online Condition Monitoring of High-Voltage Bushings Through Leakage Current Measurement. Int. J. Power Energy Syst. 2017, 203. [Google Scholar] [CrossRef]
- Suwnansri, T.; Pongmanee, A.; Suwanasri, C. On-line Monitoring for Bushing of Power Transformer. GMSARN Int. J. 2004, 8, 47–52. [Google Scholar]
- Christina, A.J.; Salam, M.A.; Rahman, Q.M.; Wen, F.; Ang, S.P.; Voon, W. Causes of Transformer Failures and Diagnostic Methods—A Review. Renew. Sustain. Energy Rev. 2018, 82, 1442–1456. [Google Scholar]
- Badicu, L.-V.; Broniecki, U.; Koltunowicz, W.; Subocz, J.; Zenker, M.; Mrozik, A. Detection of bushing insulation defects by diagnostic monitoring. In Proceedings of the International Conference on Condition Monitoring and Diagnosis (CMD), Xi’an, China, 25–28 September 2016. [Google Scholar] [CrossRef]
- Setayeshmehr, A.; Akbari, A.; Borsi, H.; Gockenbach, E. On-line Monitoring and Diagnoses of Power Transformer Bushings. IEEE Trans. Dielectr. Electr. Insul. 2006, 13, 608–615. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. IEEE Trans. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Baldi, P. Autoencoders, unsupervised learning, and deep architectures. In Proceedings of the ICML Workshop on Unsupervised and Transfer Learning, Edinburgh, UK, 26 June–1 July 2012. [Google Scholar]
- Sherstinsky, A. Fundamentals of Recurrent Neural Network (RNN) and Long Short-Term Memory (LSTM) network. Phys. D Nonlinear Phenom. 2020, 404, 132306. [Google Scholar] [CrossRef] [Green Version]
- Cook, A.A.; Mısırlı, G.; Fan, Z. Anomaly Detection for IoT Time-Series Data: A Survey. IEEE Internet Things J. 2020, 7, 6481–6494. [Google Scholar] [CrossRef]
- Blázquez-García, A.; Conde, A.; Mori, U.; Lozano, J.A. A review on outlier/anomaly detection in time series data. arXiv 2020, arXiv:2002.04236. [Google Scholar]
- Breunig, M.M.; Kriegel, H.-P.; Ng, R.T.; Sander, J. LOF: Identifying Density-based Local Outliers. In Proceedings of the ACM SIGMOD International Conference on Management of Data, Dallas, TX, USA, 16–18 May 2000. [Google Scholar] [CrossRef]
- Huang, J.; Zhu, Q.; Yang, L.; Feng, J. A non-parameter outlier detection algorithm based on Natural Neighbor. Knowl.-Based Syst. 2016, 92, 71–77. [Google Scholar] [CrossRef]
- Swain, S.; Nandi, S.; Patel, P. Development of an ARIMA Model for Monthly Rainfall Forecasting over Khordha District, Odisha, India. Recent Find. Intell. Comput. Tech. 2018, 708, 325–331. [Google Scholar] [CrossRef]
- Melnyk, I.V.; Matthews, B.L.; Valizadegan, H.; Banerjee, A.; Oza, N.C. Vector Autoregressive Model-Based Anomaly Detection in Aviation Systems. J. Aerosp. Inf. Syst. 2016, 13, 161–173. [Google Scholar] [CrossRef] [Green Version]
- Heathcote, M.J. Electrical Systems and Equipment, 3rd ed.; Pergamon: Oxford, UK, 1992; pp. 193–286. [Google Scholar]
- Lachman, M.F.; Walter, W.; von Guggenberg, P.A. Experience with Application of Sum Current Method to On-Line Diagnostics of High-Voltage Bushings and Current Transformers. In Proceedings of the Sixty-Fifth Annual International Conference of Doble Clients, Boston, MA, USA, 21–25 April 1998. [Google Scholar]
- Lachman, M.F.; Walter, W.; Skinner, J.S. Experience with On-line Diagnosis and Life Management of High-Voltage Bushings. In Proceedings of the Sixty-Sixth Annual International Conference of Doble Clients, Boston, MA, USA, 12–16 April 1999. [Google Scholar]
- Bahr, P.; Christensen, J.; Brusetti, R.C. On-line Diagnostic Case Study Involving a General Electric Type U Bushing. In Proceedings of the Seventy-Fourth Annual International Conference of Doble Clients, Boston, MA, USA, 25–30 March 2007. [Google Scholar]
- Wancour, R.; Molter, S.; Brusetti, R.C.; Weatherbee, E. Chronicling The Degradation of A 345kV General Electric Type U Bushing. In Proceedings of the Seventy-Sixth Annual International Conference of Doble Clients, Boston, MA, USA, 29 March–3 April 2009. [Google Scholar]
- Wyper, K.; MacKay, G.; McGrail, T. Condition Monitoring in the Real World. In Proceedings of the Eightieth Annual International Conference of Doble Clients, Boston, MA, USA, 7–12 April 2013. [Google Scholar]
- Bengio, Y.; Simard, P.; Frasconi, P. Learning long-term dependencies with gradient descent is difficult. IEEE Trans. Neural Netw. Learn. Syst. 1994, 5, 157–166. [Google Scholar] [CrossRef] [PubMed]
- Raeesy, R.; Gillespie, K.; Yang, Z.; Ma, C.; Drugman, T.; Gu, J.; Maas, R.; Rastrow, A.; Hoffmeister, B. LSTM-based Whisper Detection. arXiv 2018, arXiv:1809.07832. [Google Scholar]
- Hinton, G.E.; Salakhutdinov, R.R. Reducing the Dimensionality of Data with Neural Networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2015, arXiv:1412.6980. [Google Scholar]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mitiche, I.; McGrail, T.; Boreham, P.; Nesbitt, A.; Morison, G. Data-Driven Anomaly Detection in High-Voltage Transformer Bushings with LSTM Auto-Encoder. Sensors 2021, 21, 7426. https://doi.org/10.3390/s21217426
Mitiche I, McGrail T, Boreham P, Nesbitt A, Morison G. Data-Driven Anomaly Detection in High-Voltage Transformer Bushings with LSTM Auto-Encoder. Sensors. 2021; 21(21):7426. https://doi.org/10.3390/s21217426
Chicago/Turabian StyleMitiche, Imene, Tony McGrail, Philip Boreham, Alan Nesbitt, and Gordon Morison. 2021. "Data-Driven Anomaly Detection in High-Voltage Transformer Bushings with LSTM Auto-Encoder" Sensors 21, no. 21: 7426. https://doi.org/10.3390/s21217426
APA StyleMitiche, I., McGrail, T., Boreham, P., Nesbitt, A., & Morison, G. (2021). Data-Driven Anomaly Detection in High-Voltage Transformer Bushings with LSTM Auto-Encoder. Sensors, 21(21), 7426. https://doi.org/10.3390/s21217426