
WiFi FTM, UWB and Cellular-Based Radio Fusion for Indoor Positioning




Abstract
:1. Introduction
- Proposition of a fusion method in trilateration based on the work presented in [10], with a dynamic weighting with MLE that improves the robustness of location accuracy;
- Validation of the proposed method with a real-world setup with several different scenarios;
- Comparison between different MLE search methods for finding the best for resolving over-determined location problems.
2. Overview of Location Technologies
2.1. Cellular-Based Radio
- Horizontal and vertical positioning error < 3 m for 80% of user equipments (UEs) in indoor deployments;
- Horizontal and vertical positioning error <10 m and <3 m, respectively, for 80% of UEs in outdoors deployments.
2.2. Ultra-Wide Band
2.3. WiFi Fine Time Measurement
3. Materials and Methods
3.1. Proposed Positioning Method
| Algorithm 1: Positioning algorithm with MLE and fusing technologies |
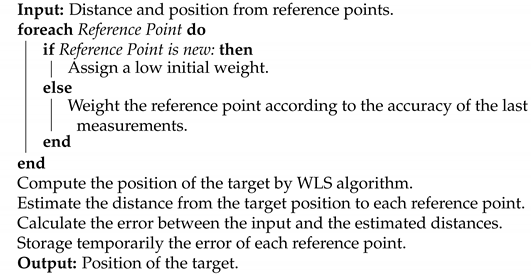 |
3.2. Multi-Technology Fusion
3.3. Maximum Likelihood Estimator (MLE)
- Nelder–Mead: is the most widely used algorithm in direct search method for solving the unconstrained optimisation problem. The Nelder–Mead method iteratively generates a sequence of tetrahedrons to approach the optimal point which can reflect, expand, contract, and shrink. The algorithm is designed for small search spaces because it quickly stalls [27];
- Limited-memory Broyden–Fletcher–Goldfarb–Shanno (L-BFGS): is designed for large non-linear optimisation problems. The algorithm handles bounds on the variables and solves unconstrained problems. However, the convergence is slow and non-optimal for real time cases [28];
- Truncated Newton (TNC): utilises rougher estimations of the optimal search direction for efficiency. As a drawback, the algorithm appears to rapidly stall [29];
- Constrained optimisation by linear approximation (COBYLA): is a direct search method which only incorporates linear models about the objective and the constrains with quick searching time [30];
- Sequential least squares programming (SLSQP): is an iterative method in which the objective and constraints functions demand to be triple continuously differentiable. The method reduces the non-linear optimisation problems by sequential iterations to trim the convergence time [31].
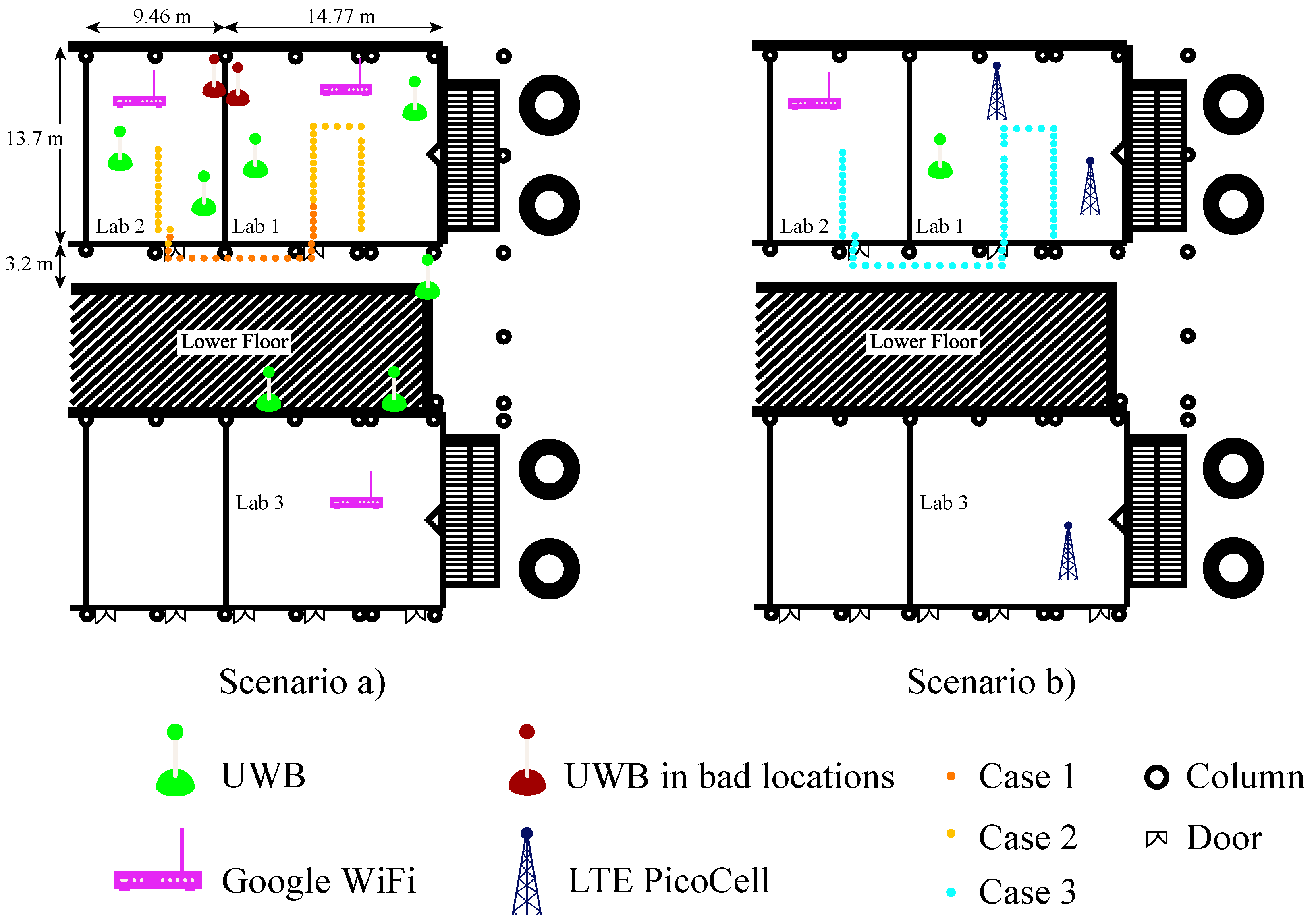
4. Experimental Setup
5. Results
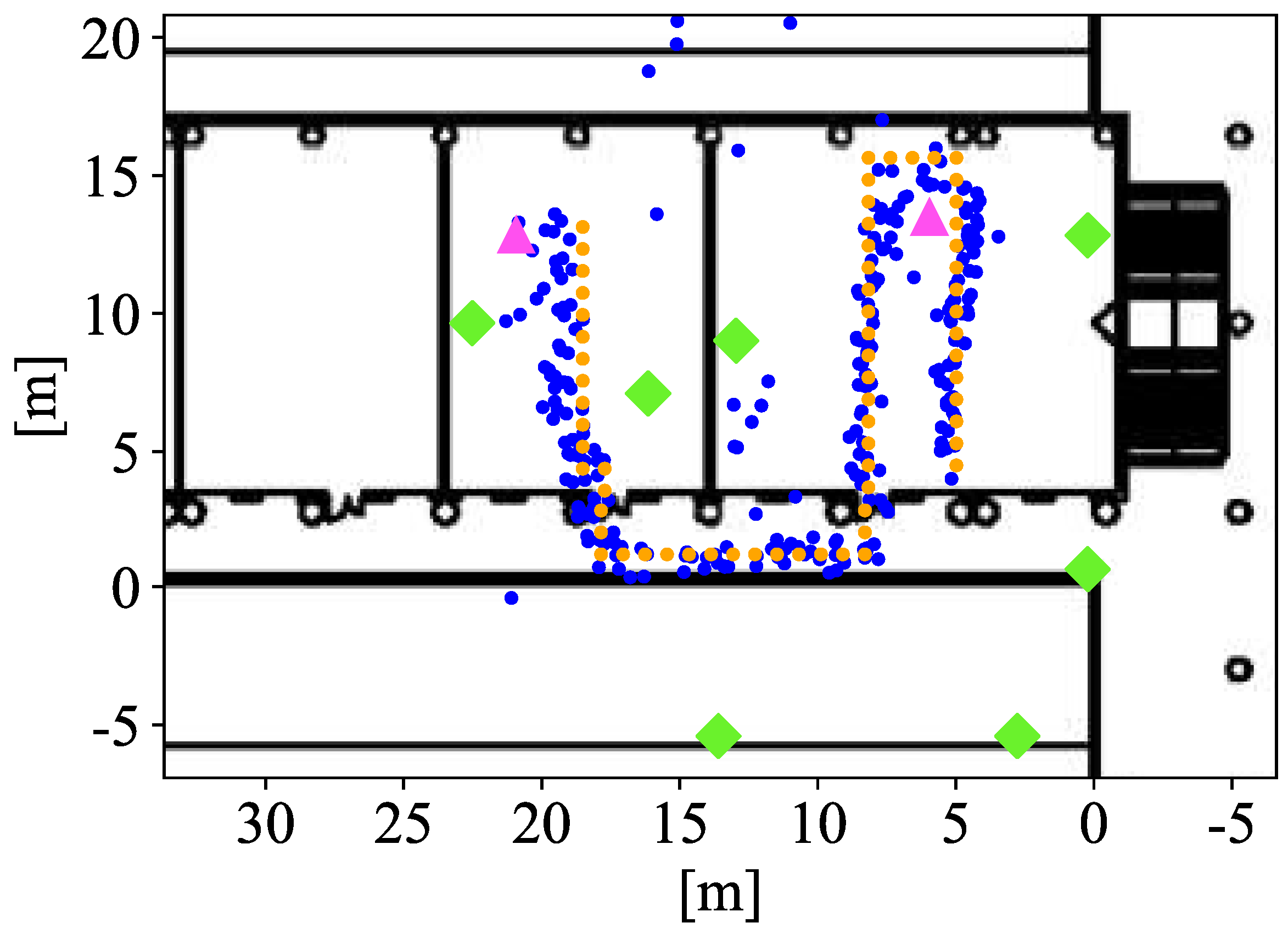
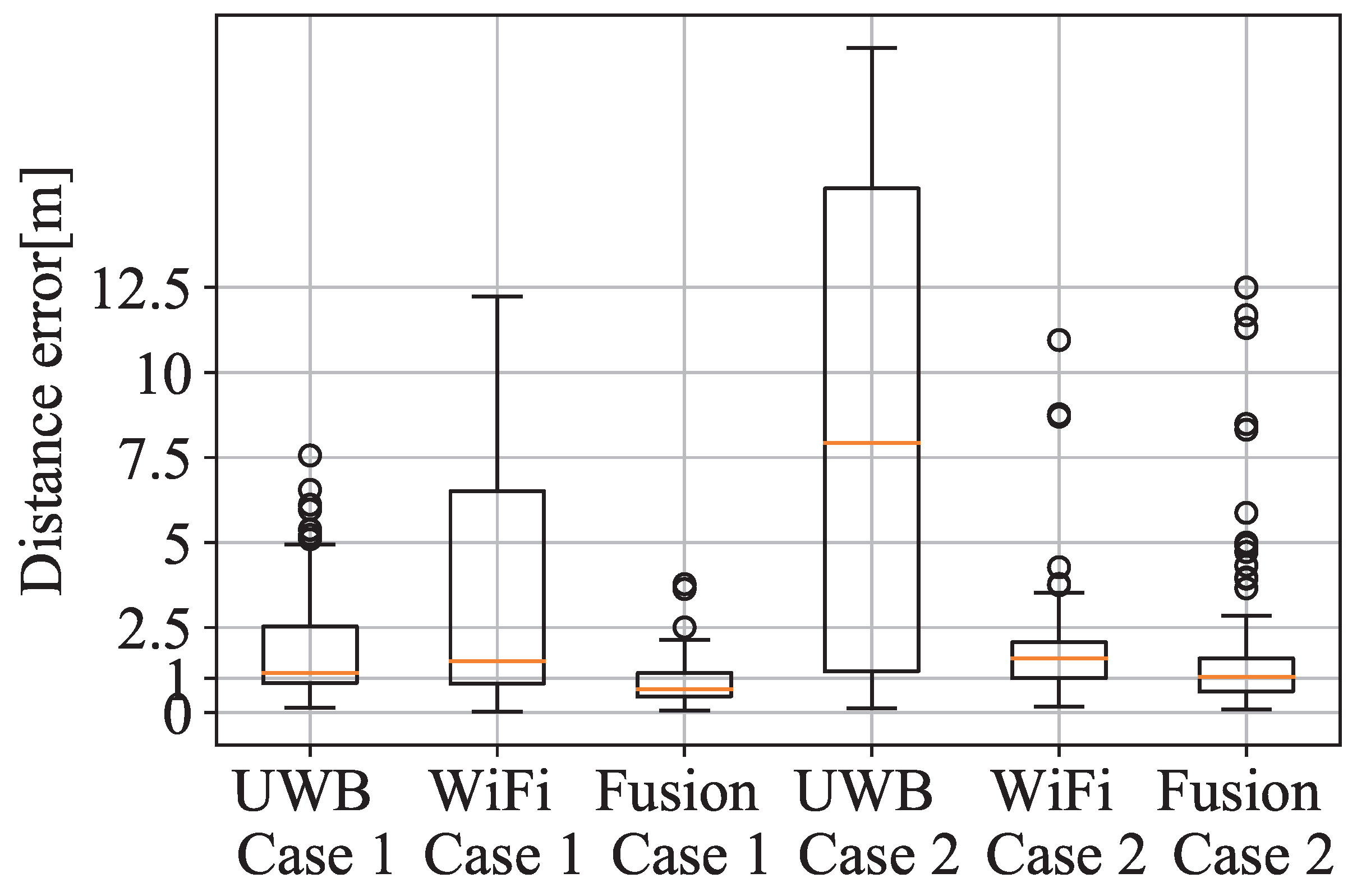
5.1. Results from Multi-Technology Fusion
5.1.1. Case 1: High-Density Deployment with Good UWB Conditions
5.1.2. Case 2: High-Density Deployment with 2 UWB in Bad Locations
5.1.3. Case 3: Low-Density Deployment of High-Precision Technologies
5.2. Comparison of the MLE Searching Methods for Positioning
6. Discussion
6.1. Performance of Multi-Technology Fusion
6.2. MLE Search Methods
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- del Peral-Rosado, J.A.; Raulefs, R.; López-Salcedo, J.A.; Seco-Granados, G. Survey of cellular mobile radio localization methods: From 1G to 5G. IEEE Commun. Surv. Tutor. 2017, 20, 1124–1148. [Google Scholar] [CrossRef]
- Mautz, R. Indoor Positioning Technologies. Permanent Link. Available online: https://www.research-collection.ethz.ch/handle/20.500.11850/54888 (accessed on 29 August 2021).
- Tahat, A.; Kaddoum, G.; Yousefi, S.; Valaee, S.; Gagnon, F. A look at the recent wireless positioning techniques with a focus on algorithms for moving receivers. IEEE Access 2016, 4, 6652–6680. [Google Scholar] [CrossRef]
- Decawave. DWM1001 System Overview and Performance. 2018. Available online: https://www.decawave.com/dwm1001/systemoverview/ (accessed on 29 August 2021).
- Hashem, O.; Harras, K.A.; Youssef, M. Accurate indoor positioning using IEEE 802.11 mc round trip time. Pervasive Mob. Comput. 2021, 75, 101416. [Google Scholar] [CrossRef]
- Yavari, M.; Nickerson, B.G. Ultra Wideband Wireless Positioning Systems; Rep. TR14-230; Department Fac. Computing Science, University of New Brunswick: Fredericton, NB, Canada, 2014; Volume 40. [Google Scholar]
- (ETSI), E.T.S.I. Ultra Wide Band. 2020. Available online: https://www.etsi.org/technologies/ultra-wide-band?jjj=1596015945046 (accessed on 2 September 2021).
- LOCUS Project. Available online: https://www.locus-project.eu/ (accessed on 29 April 2021).
- Keating, R.; Säily, M.; Hulkkonen, J.; Karjalainen, J. Overview of positioning in 5G new radio. In Proceedings of the 2019 16th International Symposium on Wireless Communication Systems (ISWCS), Oulu, Finland, 27–30 August 2019; pp. 320–324. [Google Scholar]
- Alvarez-Merino, C.S.; Luo-Chen, H.Q.; Khatib, E.J.; Barco, R. Opportunistic fusion of ranges from different sources for indoor positioning. IEEE Commun. Lett. 2021, 25, 2260–2264. [Google Scholar] [CrossRef]
- He, S.; Ji, B.; Chan, S.H.G. Chameleon: Survey-free updating of a fingerprint database for indoor localization. IEEE Pervasive Comput. 2016, 15, 66–75. [Google Scholar] [CrossRef]
- Al-homayani, F.; Mahoor, M. Improved indoor geomagnetic field fingerprinting for smartwatch localization using deep learning. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–8. [Google Scholar]
- Lobo, F.L.; Lima, M.; Oliveira, H.; El-Khatib, K.; Harrington, J. Solve: A localization system framework for vanets using the cloud and fog computing. In Proceedings of the 6th ACM Symposium on Development and Analysis of Intelligent Vehicular Networks and Applications, New York, NY, USA, 21–25 November 2017; pp. 17–22. [Google Scholar]
- Verma, R.K.; Pati, B.; Panigrahi, C.R.; Sarkar, J.L.; Mohapatra, S.D. M2C: An energy-efficient mechanism for computation in mobile cloud computing. In Progress in Advanced Computing and Intelligent Engineering; Springer: Berlin/Heidelberg, Germany, 2018; pp. 697–703. [Google Scholar]
- Hou, X.; Arslan, T. Monte Carlo localization algorithm for indoor positioning using Bluetooth low energy devices. In Proceedings of the 2017 International Conference on Localization and GNSS (ICL-GNSS). IEEE, Nottingham, UK, 27–29 June 2017; pp. 1–6. [Google Scholar]
- Bluetooth. 3 Key Factors That Determine the Range of Bluetooth. 2021. Available online: https://www.bluetooth.com/learn-about-bluetooth/key-attributes/range/#estimator (accessed on 10 July 2021).
- Bartoletti, S.; Conti, A.; Dardari, D.; Giorgetti, A. 5G Localization and Context-Awareness; University of Bologna: Bologna, Italy; University of Ferrara: Ferrara, Italy, 2018. [Google Scholar]
- Dardari, D.; Conti, A.; Ferner, U.; Giorgetti, A.; Win, M.Z. Ranging with ultrawide bandwidth signals in multipath environments. Proc. IEEE 2009, 97, 404–426. [Google Scholar] [CrossRef]
- Daily, C. Apple AirTags Use UWB Wireless Tech. Here’s How Ultra Wideband Makes Your Life Easier. 2020. Available online: https://www.cnet.com/tech/mobile/apple-airtags-use-uwb-wireless-tech-heres-how-ultra-wideband-makes-your-life-easier/ (accessed on 22 September 2021).
- I.C.S.L.S. Committee. IEEE Standard for Information Technology-Telecommunications and Information Exchange between Systems-Local and Metropolitan Area Networks-Specific Requirements Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications; IEEE: Piscataway, NJ, USA, 2007. [Google Scholar]
- Gentner, C.; Ulmschneider, M.; Kuehner, I.; Dammann, A. WiFi-RTT Indoor Positioning. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20 April 2020; pp. 1029–1035. [Google Scholar]
- Martin-Escalona, I.; Zola, E. Passive round-trip-time positioning in dense IEEE 802.11 networks. Electronics 2020, 9, 1193. [Google Scholar] [CrossRef]
- Martin-Escalona, I.; Zola, E. Ranging Estimation Error in WiFi Devices Running IEEE 802.11 mc. In Proceedings of the GLOBECOM 2020-2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020; pp. 1–7. [Google Scholar]
- Teunissen, P.; Montenbruck, O. Springer Handbook of Global Navigation Satellite Systems; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Miura, K. An introduction to maximum likelihood estimation and information geometry. Interdiscip. Inf. Sci. 2011, 17, 155–174. [Google Scholar] [CrossRef] [Green Version]
- Zou, C. Lecture Notes on Asymptotic Statistics. Available online: http://web.stat.nankai.edu.cn/chlzou/Note_AS.pdf (accessed on 17 September 2021).
- Gao, F.; Han, L. Implementing the Nelder-Mead simplex algorithm with adaptive parameters. Comput. Optim. Appl. 2012, 51, 259–277. [Google Scholar] [CrossRef]
- Zhu, C.; Byrd, R.H.; Lu, P.; Nocedal, J. Algorithm 778: L-BFGS-B: Fortran subroutines for large-scale bound-constrained optimization. ACM Trans. Math. Softw. (TOMS) 1997, 23, 550–560. [Google Scholar] [CrossRef]
- Matott, L.S.; Leung, K.; Sim, J. Application of MATLAB and Python optimizers to two case studies involving groundwater flow and contaminant transport modeling. Comput. Geosci. 2011, 37, 1894–1899. [Google Scholar] [CrossRef]
- Koch, P.; Bagheri, S.; Foussette, C.; Krause, P.; Bäck, T.; Konen, W. Constrained optimization with a limited number of function evaluations. In Proceedings of the ProcEEDings 24. Workshop comPutational intElligEncE, Dortmund, Germany, 27–28 November 2014; p. 237. [Google Scholar]
- Knežević, N.; Lukić, B.; Jovanović, K.; Žlajpah, L.; Petrič, T. End-effector Cartesian stiffness shaping-sequential least squares programming approach. Serbian J. Electr. Eng. 2021, 18, 1–14. [Google Scholar] [CrossRef]
- Community, S. Different Searching Methods for MLE. Available online: https://docs.scipy.org/doc/scipy/reference/generated/scipy.optimize.minimize.html (accessed on 30 April 2020).
- Google Support. Available online: https://support.google.com/googlenest/thread/44036979/google-wifi-transmit-power-value?hl=en (accessed on 28 September 2021).
- DecaWave. Available online: https://www.decawave.com/application-notes/ (accessed on 28 September 2021).
- 3GPP. Study on channel model for frequencies from 0.5 to 100 GHz. In Technical Report (TR) 38.901, 3rd Generation Partnership Project (3GPP); 3GPP: Sophia Antipolis, France, 2017. [Google Scholar]
- Huang, C.; Molisch, A.F.; He, R.; Wang, R.; Tang, P.; Ai, B.; Zhong, Z. Machine learning-enabled LOS/NLOS identification for MIMO systems in dynamic environments. IEEE Trans. Wirel. Commun. 2020, 19, 3643–3657. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronym | Definition |
|---|---|
| 5G | Fifth generation |
| AP | Access Points |
| AR | Augmented Reality |
| BLE | Bluetooth Low Energy |
| FCC | Federal Communication Commission |
| FTM | Fine-Time Measurement |
| GNSS | Global Navigation Satellite Systems |
| GPS | Global Satellite System |
| IoT | Internet of Things |
| L-BFGS | Limited-memory Broyden–Fletcher–Goldfarb–Shanno |
| LoS | Line of Sight |
| LTE | Long Term Evolution |
| NLoS | Non Line of Sight |
| MLE | Maximum Likelihood Estimator |
| PANS | Positioning And Networking Stack |
| RSSI | Received Signal Strength Indicator |
| RTT | Round-Trip Time |
| ToA | Time of Arrival |
| UE | User Equipment |
| UWB | Ultra-Wide Band |
| WLS | Weighted Least-Square |
| Technology | Access Point | Positioning Accuracy | Positioning Method | Advantages | Disadvantages |
|---|---|---|---|---|---|
| Cellular network | Cellular tower | >30 m | Trilateration | World-wide coverage; No extra infrastructure needed | Low-precision > 100 m |
| UWB | UWB anchor | cm-m | Trilateration | Robust against multpath; high-accuracy; easy-deployment | High-cost |
| WiFi-FTM | Router | cm-m | Trilateration | Low cost; high-accuracy | Not yet widely deployed |
| Bluetooth | Beacon | m | Trilateration; fingerprinting | Low cost; easy-deployment | Low-stability |
| INS | N/A | m | PDR | Self-sufficient | Accumulative error; Smartphone-based calculation |
| Geomagnetism | N/A | m | Fingerprinting | No infrastructure; low-cost; ubiquitous | Need data collection; affected by temporal electrical equipment; |
| Nelder-Mead | L-BFGS-B | TNC | COBYLA | SLSQP | No Weighting | ||
|---|---|---|---|---|---|---|---|
| Case 1 | [m] | 1.14 | 1.46 | 1.43 | 1.14 | 1.14 | 1.07 |
| [m] | 0.77 | 1.2 | 0.99 | 0.77 | 0.77 | 0.67 | |
| 80% cdf error [m] | 1.63 | 1.84 | 1.93 | 1.63 | 1.63 | 1.45 | |
| Time elapsed [s] | 0.103 | 0.065 | 0.169 | 0.200 | 0.067 | 0.070 | |
| Case 2 | [m] | 0.98 | 1.52 | 1.52 | 0.96 | 0.95 | 1.11 |
| [m] | 0.67 | 1.74 | 1.74 | 0.67 | 0.67 | 0.84 | |
| 80% cdf error [m] | 1.3 | 1.83 | 1.83 | 1.25 | 1.23 | 1.46 | |
| Time elapsed [s] | 0.125 | 0.079 | 0.176 | 0.225 | 0.082 | 0.078 | |
| Case 3 | [m] | 18.7 | 19.08 | 18.36 | 18.7 | 18.7 | 18.14 |
| [m] | 9.65 | 10.75 | 10.14 | 9.66 | 9.66 | 10.71 | |
| 80% cdf error [m] | 27.84 | 27.36 | 26.88 | 27.84 | 27.84 | 25.71 | |
| Time elapsed [s] | 0.109 | 0.059 | 0.194 | 0.254 | 0.052 | 0.050 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Álvarez-Merino, C.S.; Luo-Chen, H.Q.; Khatib, E.J.; Barco, R. WiFi FTM, UWB and Cellular-Based Radio Fusion for Indoor Positioning. Sensors 2021, 21, 7020. https://doi.org/10.3390/s21217020
Álvarez-Merino CS, Luo-Chen HQ, Khatib EJ, Barco R. WiFi FTM, UWB and Cellular-Based Radio Fusion for Indoor Positioning. Sensors. 2021; 21(21):7020. https://doi.org/10.3390/s21217020
Chicago/Turabian StyleÁlvarez-Merino, Carlos S., Hao Qiang Luo-Chen, Emil Jatib Khatib, and Raquel Barco. 2021. "WiFi FTM, UWB and Cellular-Based Radio Fusion for Indoor Positioning" Sensors 21, no. 21: 7020. https://doi.org/10.3390/s21217020
APA StyleÁlvarez-Merino, C. S., Luo-Chen, H. Q., Khatib, E. J., & Barco, R. (2021). WiFi FTM, UWB and Cellular-Based Radio Fusion for Indoor Positioning. Sensors, 21(21), 7020. https://doi.org/10.3390/s21217020