
FBG-Based Sensor for the Assessment of Heat Transfer Rate of Liquids in a Forced Convective Environment

 , ,
, ,  , and
, and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. FBG: Construction Aspects, Operation Principles, and Characterization
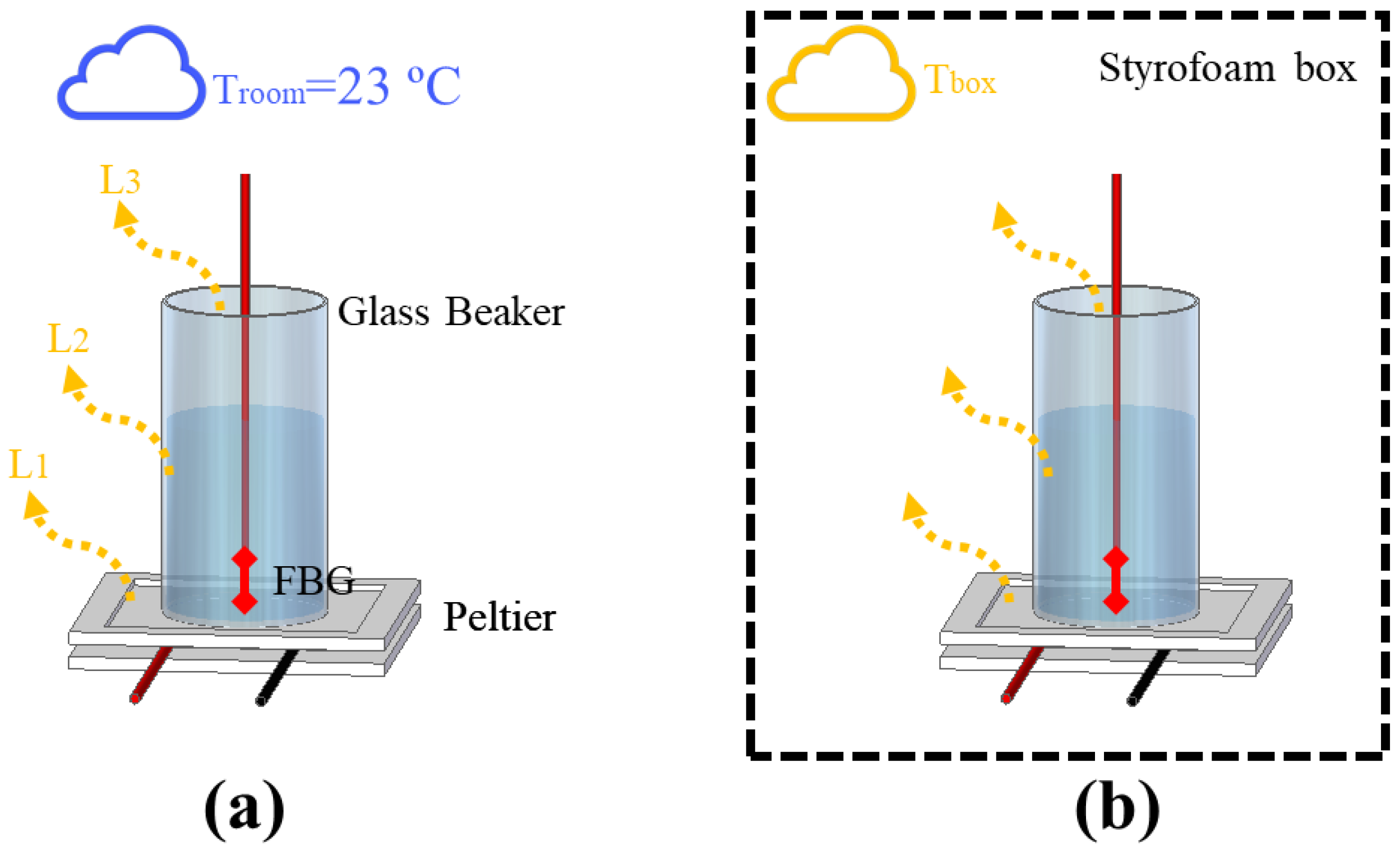
2.2. Analysis of Thermal Power Distribution and Stability
2.3. Measurement of Heat Transfer Rate
3. Results and Discussions
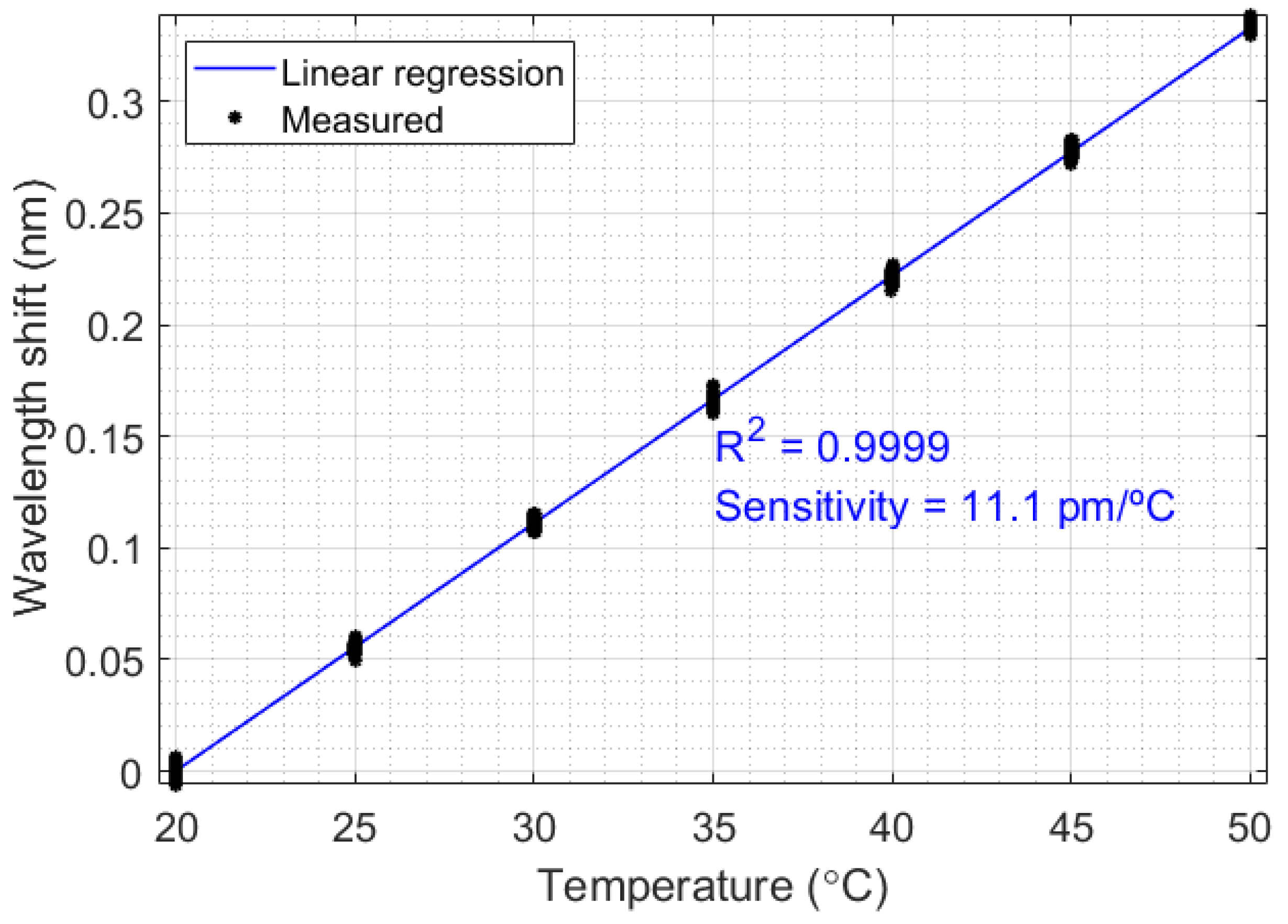
3.1. Temperature Calibration
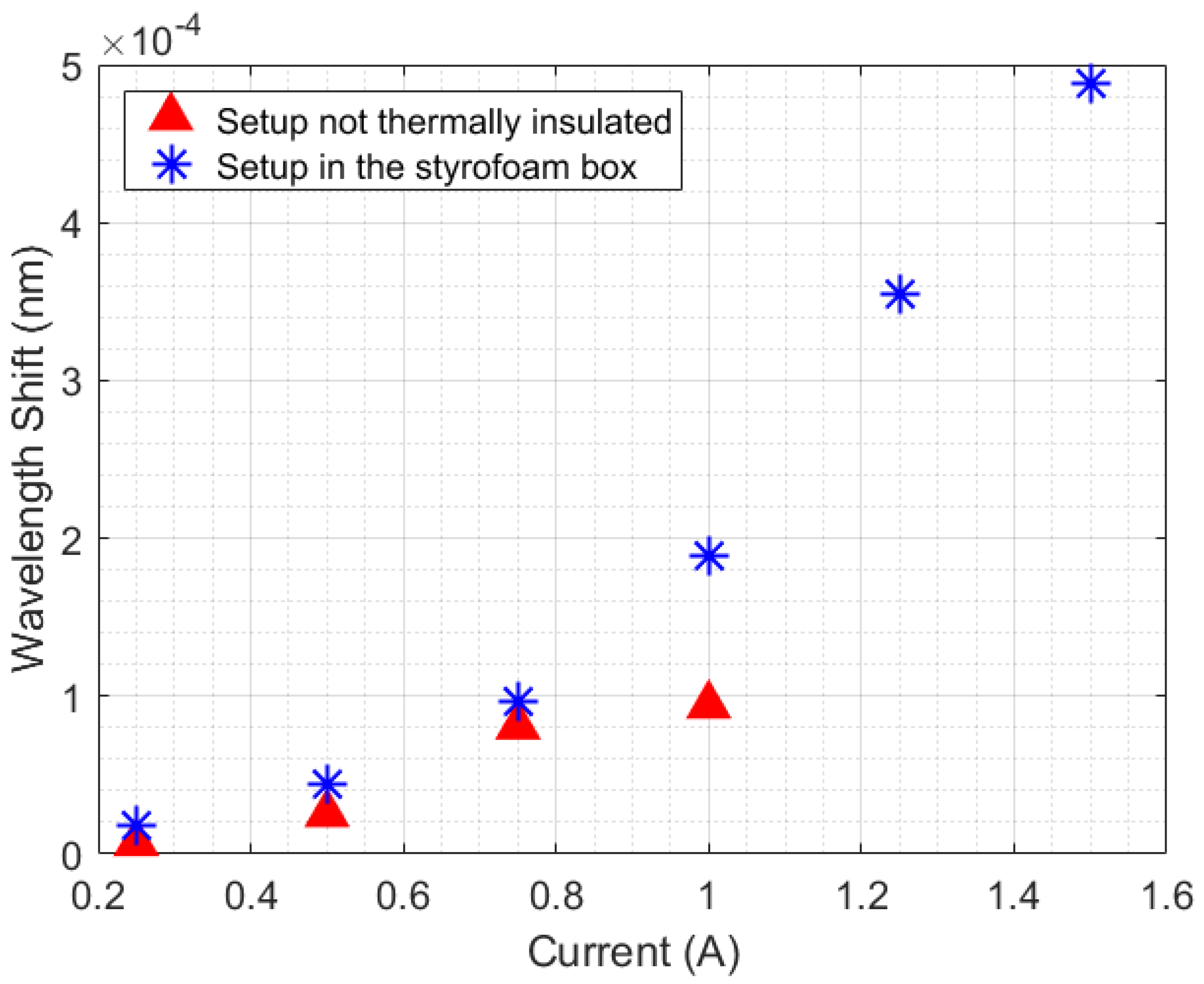
3.2. Analysis of Thermal Power Distribution and Stability
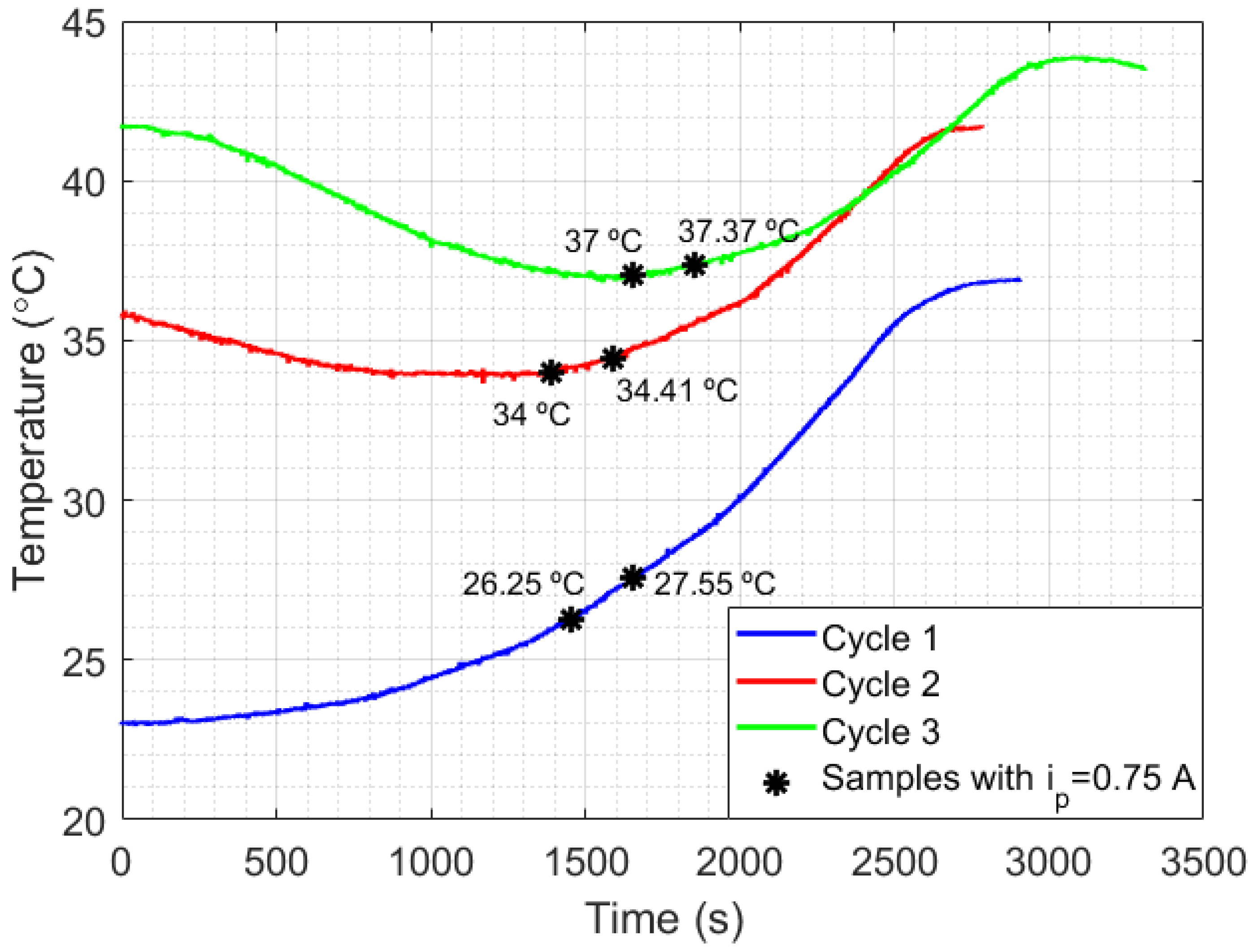
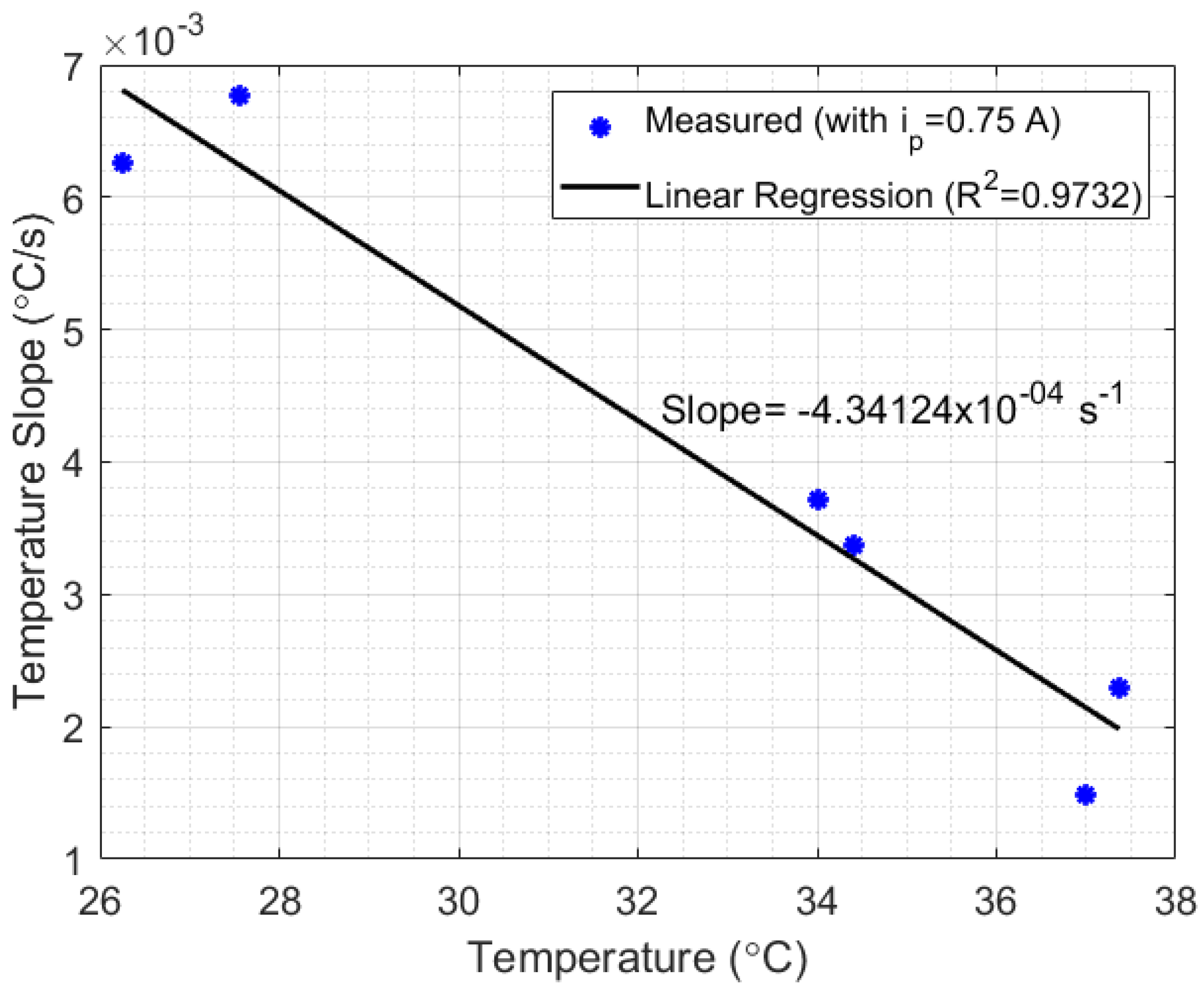
3.3. Measurement of Heat Transfer Rate
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hemminger, W.; Sarge, S. Chapter 1—Definitions, Nomenclature, Terms and Literature. In Handbook of Thermal Analysis and Calorimetry: Principles and Practice; Brown, M.E., Ed.; Elsevier Science B.V.: Amsterdam, The Netherlands, 1998; Volume 1, pp. 1–73. [Google Scholar] [CrossRef]
- He, Y. Rapid thermal conductivity measurement with a hot disk sensor: Part 2. Characterization of thermal greases. Thermochim. Acta 2005, 436, 130–134. [Google Scholar] [CrossRef]
- Harris, A.; Kazachenko, S.; Bateman, R.; Nickerson, J.; Emanuel, M. Measuring the thermal conductivity of heat transfer fluids via the modified transient plane source (MTPS). J. Therm. Anal. Calorim. 2014, 116, 1309–1314. [Google Scholar] [CrossRef]
- Leal-Junior, A.G.; Marques, C.; Frizera, A.; Pontes, M.J. Multi-interface level in oil tanks and applications of optical fiber sensors. Opt. Fiber Technol. 2018, 40, 82–92. [Google Scholar] [CrossRef]
- Woyessa, G.; Pedersen, J.K.M.; Fasano, A.; Nielsen, K.; Markos, C.; Rasmussen, H.K.; Bang, O. Zeonex-PMMA microstructured polymer optical FBGs for simultaneous humidity and temperature sensing. Opt. Lett. 2017, 42, 1161–1164. [Google Scholar] [CrossRef] [PubMed]
- Leal-Junior, A.G.; Marques, C. Diaphragm-Embedded Optical Fiber Sensors: A Review and Tutorial. IEEE Sens. J. 2021, 21, 12719–12733. [Google Scholar] [CrossRef]
- Lazaro, R.C.; Marques, C.; Castellani, C.E.S.; Leal-Junior, A. FBG-Based Measurement Systems for Density, Specific Heat Capacity and Thermal Conductivity Assessment for Liquids. IEEE Sens. J. 2021, 21, 7657–7664. [Google Scholar] [CrossRef]
- Može, M.; Zupančič, M.; Golobič, I. Investigation of the scatter in reported pool boiling CHF measurements including analysis of heat flux and measurement uncertainty evaluation methodology. Appl. Therm. Eng. 2020, 169, 114938. [Google Scholar] [CrossRef]
- Chakravartula, V.; Rakshit, S.; Dhanalakshmi, S.; Kumar, R.; Narayanamoorthi, R. Linear Temperature Distribution Sensor Using FBG in Liquids—Local Heat Transfer Examination Application. IEEE Sens. J. 2021, 21, 16651–16658. [Google Scholar] [CrossRef]
- Incropera, F.; DeWitt, D.; Bergman, T.; Lavine, A. Fundamentals of Heat and Mass Transfer; Wiley: Hoboken, NJ, USA, 2007. [Google Scholar]
- Czichos, H.; Saito, T.; Smith, L. Springer Handbook of Materials Measurement Methods; Springer: Berlin, Germany, 2006; Volume 153–158. [Google Scholar] [CrossRef]
- Demir, M.; Aksöz, S.; Öztürk, E.; Maraşlı, N. The Measurement of Thermal Conductivity Variation with Temperature for Sn-Based Lead-Free Binary Solders. Metall. Mater. Trans. B 2014, 45, 1739–1749. [Google Scholar] [CrossRef]
- Dubois, S.; Lebeau, F. Design, construction and validation of a guarded hot plate apparatus for thermal conductivity measurement of high thickness crop-based specimens. Mater. Struct. 2015, 48, 407–421. [Google Scholar] [CrossRef]
- Paul, G.; Chopkar, M.; Manna, I.; Das, P. Techniques for measuring the thermal conductivity of nanofluids: A review. Renew. Sustain. Energy Rev. 2010, 14, 1913–1924. [Google Scholar] [CrossRef]
- Salazar, A. On thermal diffusivity. Eur. J. Phys. 2003, 24, 351–358. [Google Scholar] [CrossRef]
- Pullins, C.A.; Diller, T.E. In situ High Temperature Heat Flux Sensor Calibration. Int. J. Heat Mass Transf. 2010, 53, 3429–3438. [Google Scholar] [CrossRef]
- Zhao, D.; Qian, X.; Gu, X.; Jajja, S.A.; Yang, R. Measurement Techniques for Thermal Conductivity and Interfacial Thermal Conductance of Bulk and Thin Film Materials. J. Electron. Packag. 2016, 138. [Google Scholar] [CrossRef] [Green Version]
- Díaz, C.A.R.; Leal-Junior, A.; Marques, C.; Frizera, A.; Pontes, M.J.; Antunes, P.F.C.; André, P.S.B.; Ribeiro, M.R.N. Optical Fiber Sensing for Sub-Millimeter Liquid-Level Monitoring: A Review. IEEE Sens. J. 2019, 19, 7179–7191. [Google Scholar] [CrossRef]
- Cui, Y.; Jiang, Y.; Liu, T.; Hu, J.; Jiang, L. A Dual-Cavity Fabry–Perot Interferometric Fiber-Optic Sensor for the Simultaneous Measurement of High-Temperature and High-Gas-Pressure. IEEE Access 2020, 8, 80582–80587. [Google Scholar] [CrossRef]
- Ghildiyal, S.; Ranjan, P.; Mishra, S.; Balasubramaniam, R.; John, J. Fabry–Perot Interferometer-Based Absolute Pressure Sensor With Stainless Steel Diaphragm. IEEE Sens. J. 2019, 19, 6093–6101. [Google Scholar] [CrossRef]
- Ahsani, V.; Ahmed, F.; Jun, M.; Bradley, C. Tapered Fiber-Optic Mach-Zehnder Interferometer for Ultra-High Sensitivity Measurement of Refractive Index. Sensors 2019, 19, 1652. [Google Scholar] [CrossRef] [Green Version]
- Hill, K.O.; Meltz, G. Fiber Bragg grating technology fundamentals and overview. J. Light. Technol. 1997, 15, 1263–1276. [Google Scholar] [CrossRef] [Green Version]
- Leal-Junior, A.G.; Theodosiou, A.; Díaz, C.A.R.; Avellar, L.M.; Kalli, K.; Marques, C.; Frizera, A. FPI-POFBG Angular Movement Sensor Inscribed in CYTOP Fibers With Dynamic Angle Compensator. IEEE Sens. J. 2020, 20, 5962–5969. [Google Scholar] [CrossRef]
- Zhang, Q.; Lei, J.; Chen, Y.; Wu, Y.; Xiao, H. Glass 3D Printing of Microfluidic Pressure Sensor Interrogated by Fiber-Optic Refractometry. IEEE Photonics Technol. Lett. 2020, 32, 414–417. [Google Scholar] [CrossRef]
- Zhang, S.; He, J.; Yu, Q.; Wu, X. Multi-scale load identification system based on distributed optical fiber and local FBG-based vibration sensors. Optik 2020, 219, 165159. [Google Scholar] [CrossRef]
- Leal-Junior, A.; Avellar, L.; Frizera, A.; Marques, C. Smart textiles for multimodal wearable sensing using highly stretchable multiplexed optical fiber system. Sci. Rep. 2020, 10, 13867. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; Zhang, Y.; Zhang, W.; Li, Z.; Kong, L.; Yu, L.; Ge, J.; Yan, T. Ultra-high sensitivity and temperature-compensated Fabry–Perot strain sensor based on tapered FBG. Opt. Laser Technol. 2020, 124, 105997. [Google Scholar] [CrossRef]
- Udoh, S.; Njuguma, J.; Prabhu, R. Modelling and Simulation of Fiber Bragg Grating Characterization for Oil and Gas Sensing Applications. In Proceedings of the First International Conference on Systems Informatics, Modelling and Simulation (ICONS 2014), Vienna, Austria, 28–30 August 2014. [Google Scholar]
- Marques, C.A.F.; Leal-Junior, A.G.; Min, R.; Domingues, M.; Leitão, C.; Antunes, P.; Ortega, B.; André, P. Advances on Polymer Optical Fiber Gratings Using a KrF Pulsed Laser System Operating at 248 nm. Fibers 2018, 6, 13. [Google Scholar] [CrossRef] [Green Version]
- Min, R.; Pereira, L.; Paixão, T.; Woyessa, G.; André, P.; Bang, O.; Antunes, P.; Pinto, J.; Li, Z.; Ortega, B.; et al. Inscription of Bragg gratings in undoped PMMA mPOF with Nd:YAG laser at 266 nm wavelength. Opt. Express 2019, 27, 38039–38048. [Google Scholar] [CrossRef] [PubMed]
- Díaz, C.A.R.; Leal-Junior, A.G.; André, P.S.B.; da Costa Antunes, P.F.; Pontes, M.J.; Frizera-Neto, A.; Ribeiro, M.R.N. Liquid Level Measurement Based on FBG-Embedded Diaphragms With Temperature Compensation. IEEE Sens. J. 2018, 18, 193–200. [Google Scholar] [CrossRef]
- Pereira, K.; Coimbra, W.; Lazaro, R.; Frizera-Neto, A.; Marques, C.; Leal-Junior, A.G. FBG-Based Temperature Sensors for Liquid Identification and Liquid Level Estimation via Random Forest. Sensors 2021, 21, 4568. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Curve | i (A) | Cp (cal/g °C) | k (W/mK) |
|---|---|---|---|
| 1 | 0.25 | 3.3132 | 18.2605 |
| 2 | 0.5 | 1.8507 | 3.3131 |
| 3 | 0.75 | 0.8713 | 0.6643 |
| 4 | 1.0 | 0.9986 | 0.6130 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lazaro, R.; Frizera-Neto, A.; Marques, C.; Castellani, C.E.S.; Leal-Junior, A. FBG-Based Sensor for the Assessment of Heat Transfer Rate of Liquids in a Forced Convective Environment. Sensors 2021, 21, 6922. https://doi.org/10.3390/s21206922
Lazaro R, Frizera-Neto A, Marques C, Castellani CES, Leal-Junior A. FBG-Based Sensor for the Assessment of Heat Transfer Rate of Liquids in a Forced Convective Environment. Sensors. 2021; 21(20):6922. https://doi.org/10.3390/s21206922
Chicago/Turabian StyleLazaro, Renan, Anselmo Frizera-Neto, Carlos Marques, Carlos Eduardo Schmidt Castellani, and Arnaldo Leal-Junior. 2021. "FBG-Based Sensor for the Assessment of Heat Transfer Rate of Liquids in a Forced Convective Environment" Sensors 21, no. 20: 6922. https://doi.org/10.3390/s21206922
APA StyleLazaro, R., Frizera-Neto, A., Marques, C., Castellani, C. E. S., & Leal-Junior, A. (2021). FBG-Based Sensor for the Assessment of Heat Transfer Rate of Liquids in a Forced Convective Environment. Sensors, 21(20), 6922. https://doi.org/10.3390/s21206922