
In-Tire Distributed Optical Fiber (DOF) Sensor for the Load Assessment of Light Vehicles in Static Conditions


Abstract
:1. Introduction
Context and General Aim
2. Literature Review/State-of-the-Art
2.1. Load Sensing: From Commercial Use to Autonomous Vehicles
2.2. Deflection Measurement and Load Relationship
2.3. Strain Measurement and Load Relationship
2.4. Acceleration Measurement and Load Relationship
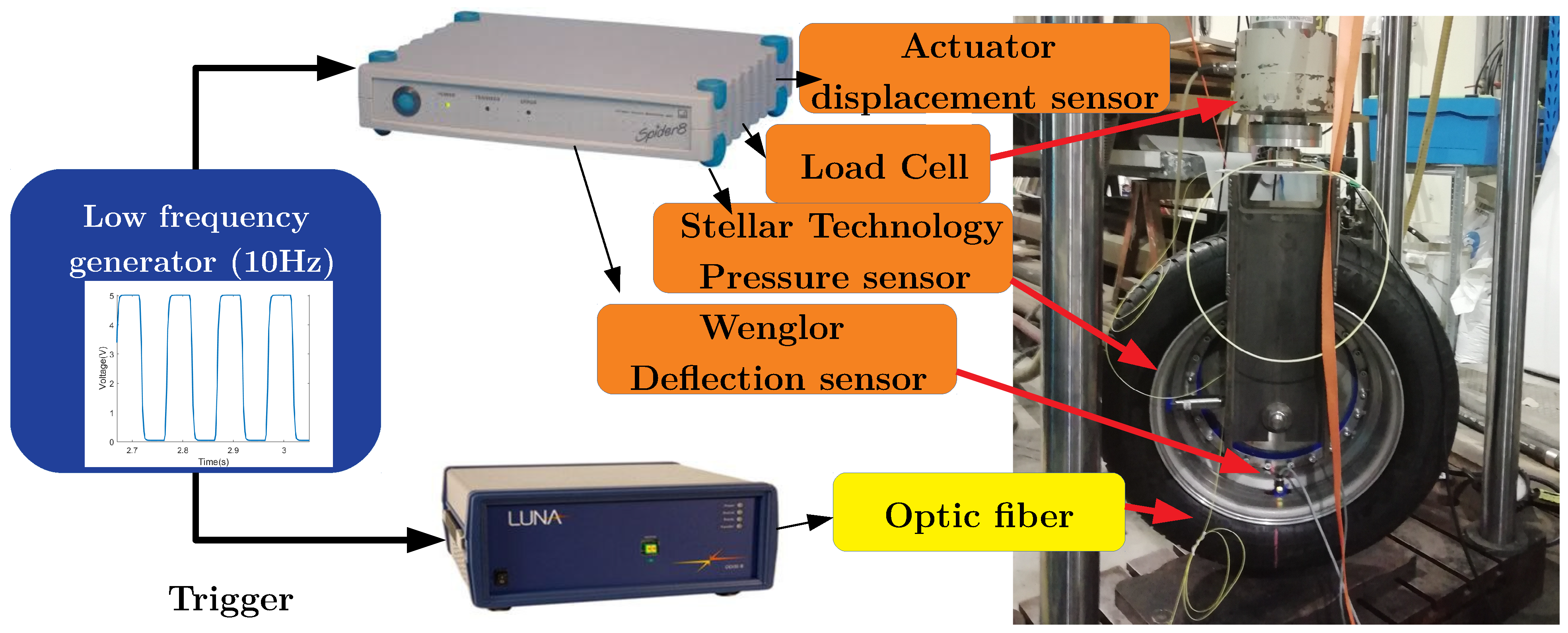
3. Experimental Setup
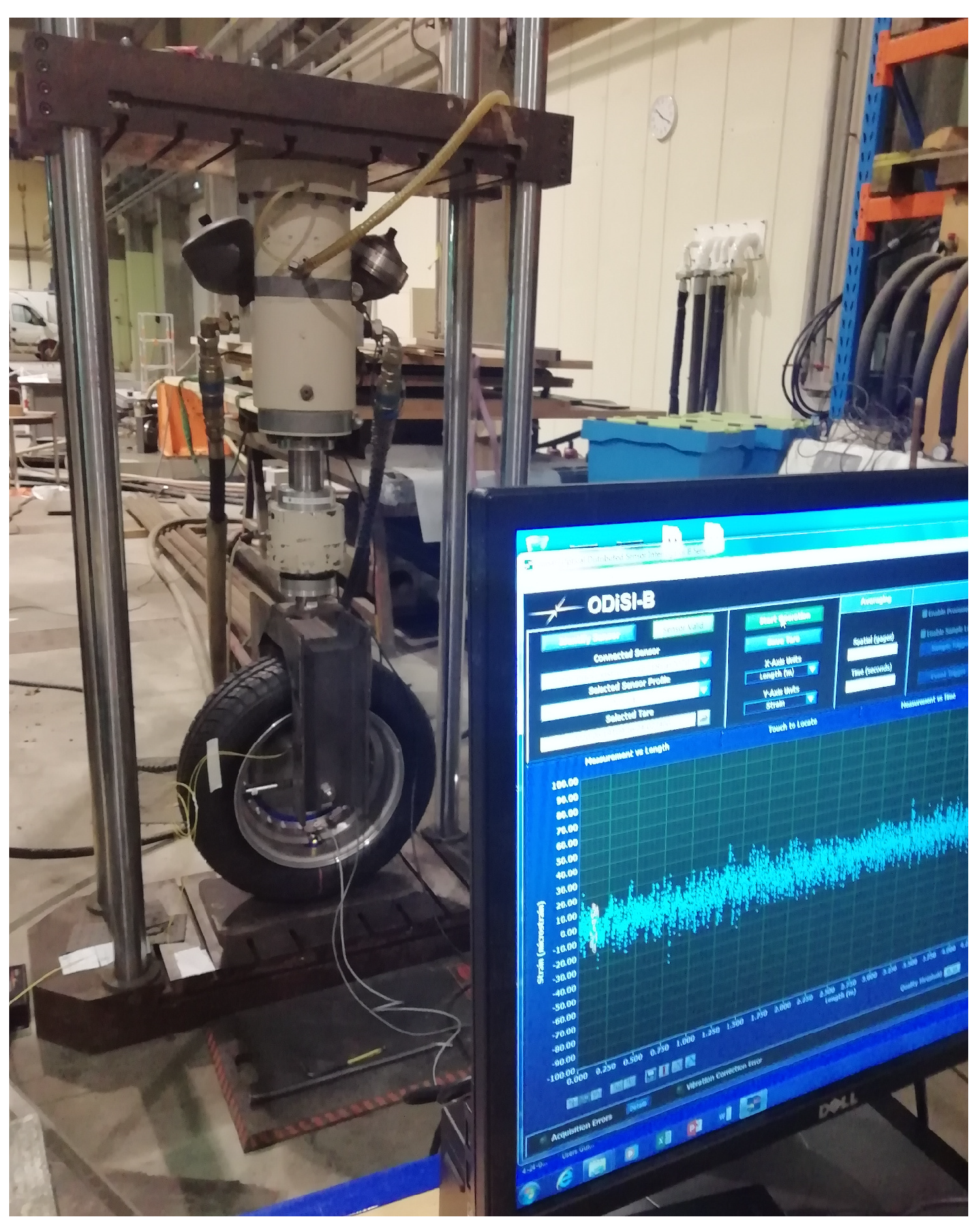
3.1. Vertical Loading Device
3.2. Tested Wheel
- a laser beam for the measurement of the deflection (Wenglor, sensitivity 0.2 V/mm). The laser head is screwed on the tire rim and points radially to a white target painted on the center of the inner side on the tire contact patch;
- a pressure sensor for the measurement of the tire inflation pressure (Stellar Technology, sensitivity 2.9 V/bar);
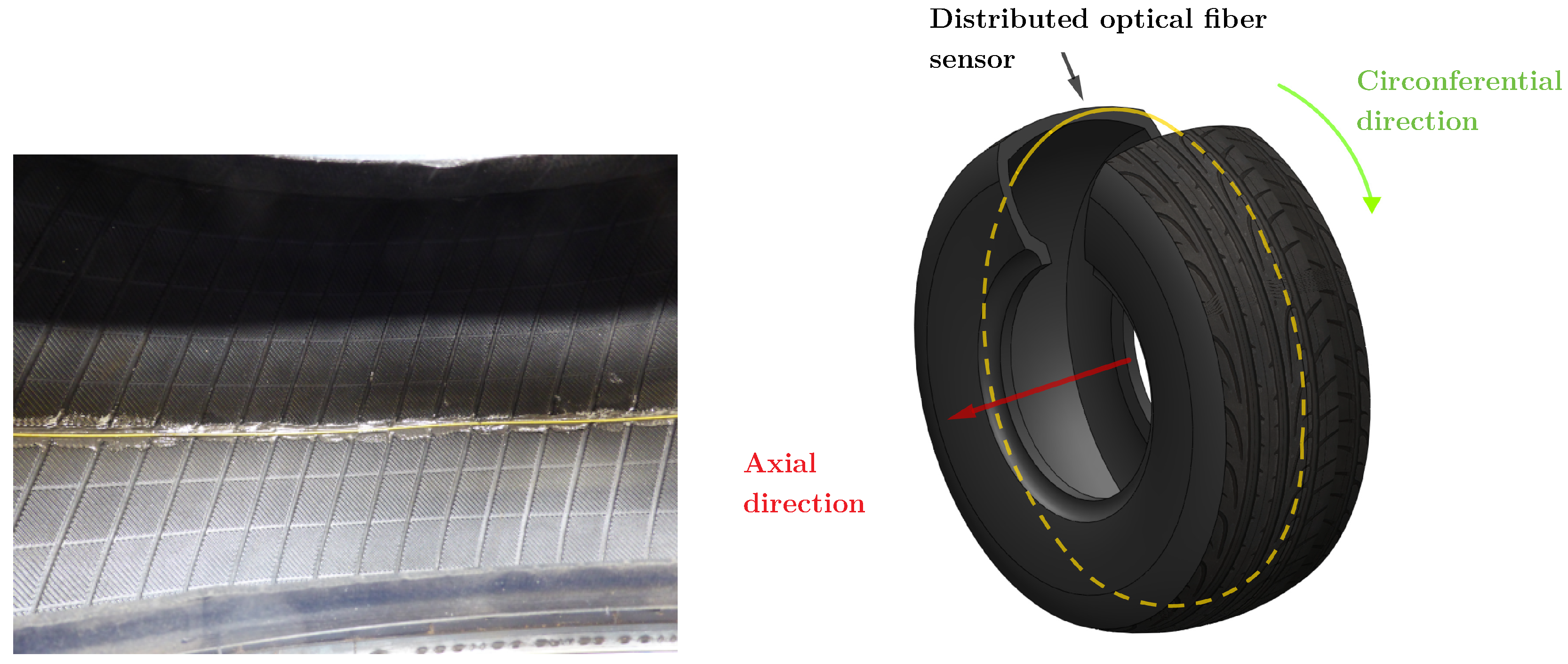
- an optical fiber glued in the middle of the inner tire belt over the full tire circumference (Luna system).
3.3. In-Tire Dof Sensor
4. Data Processing for Load Assessment
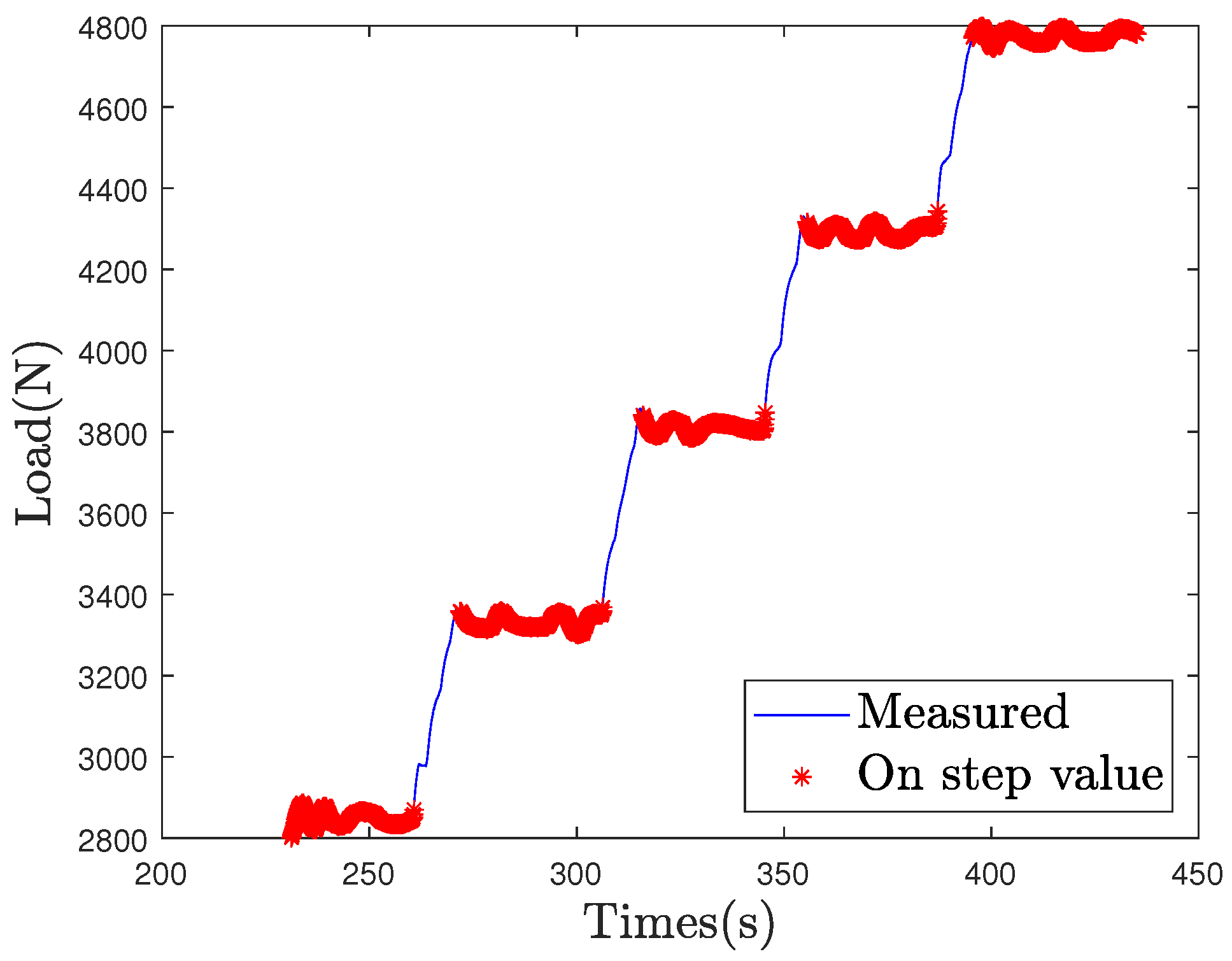
4.1. Loading Cases
4.2. Load Computation from Deflection Data
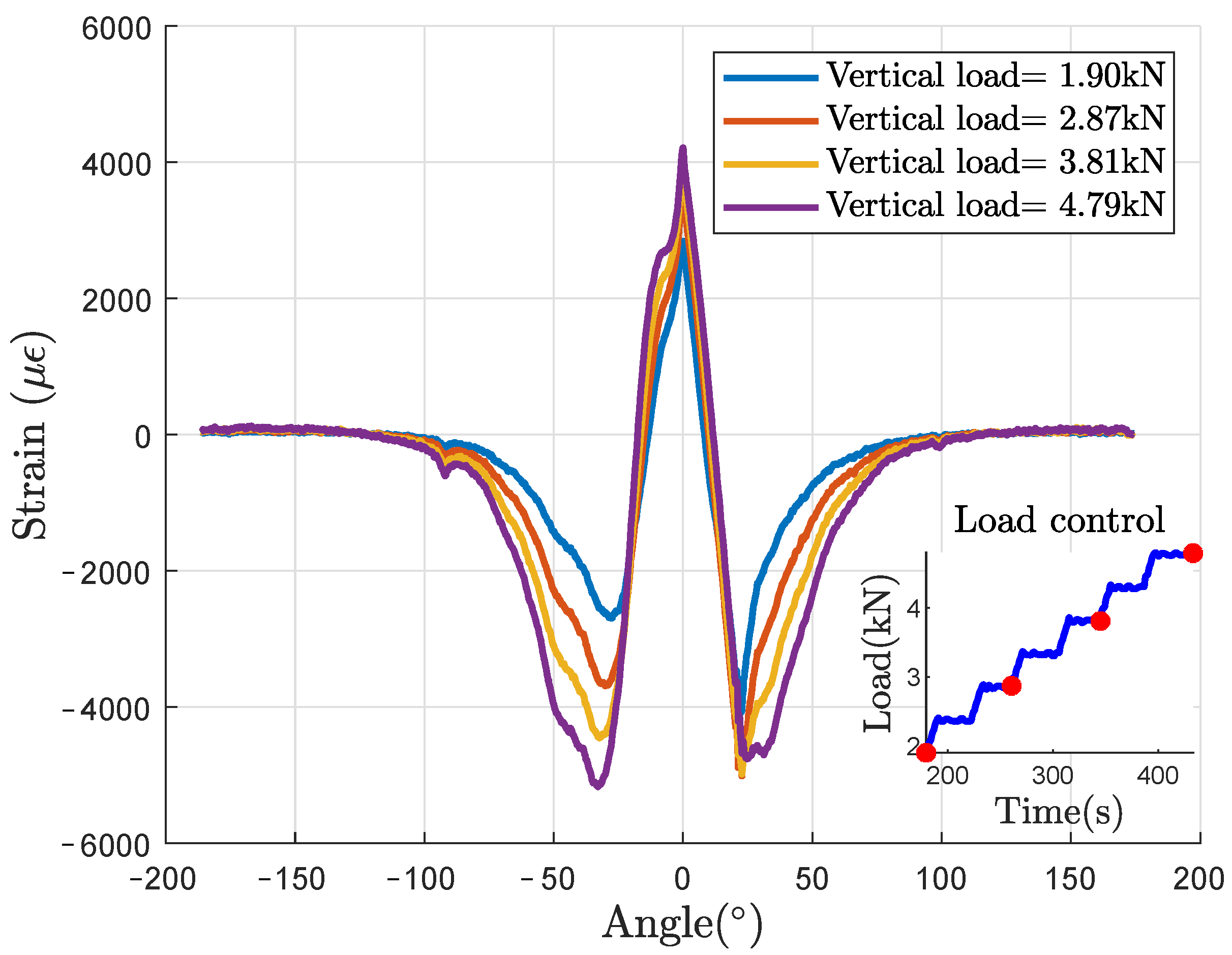
4.3. Load Computation from Dof Strain Data
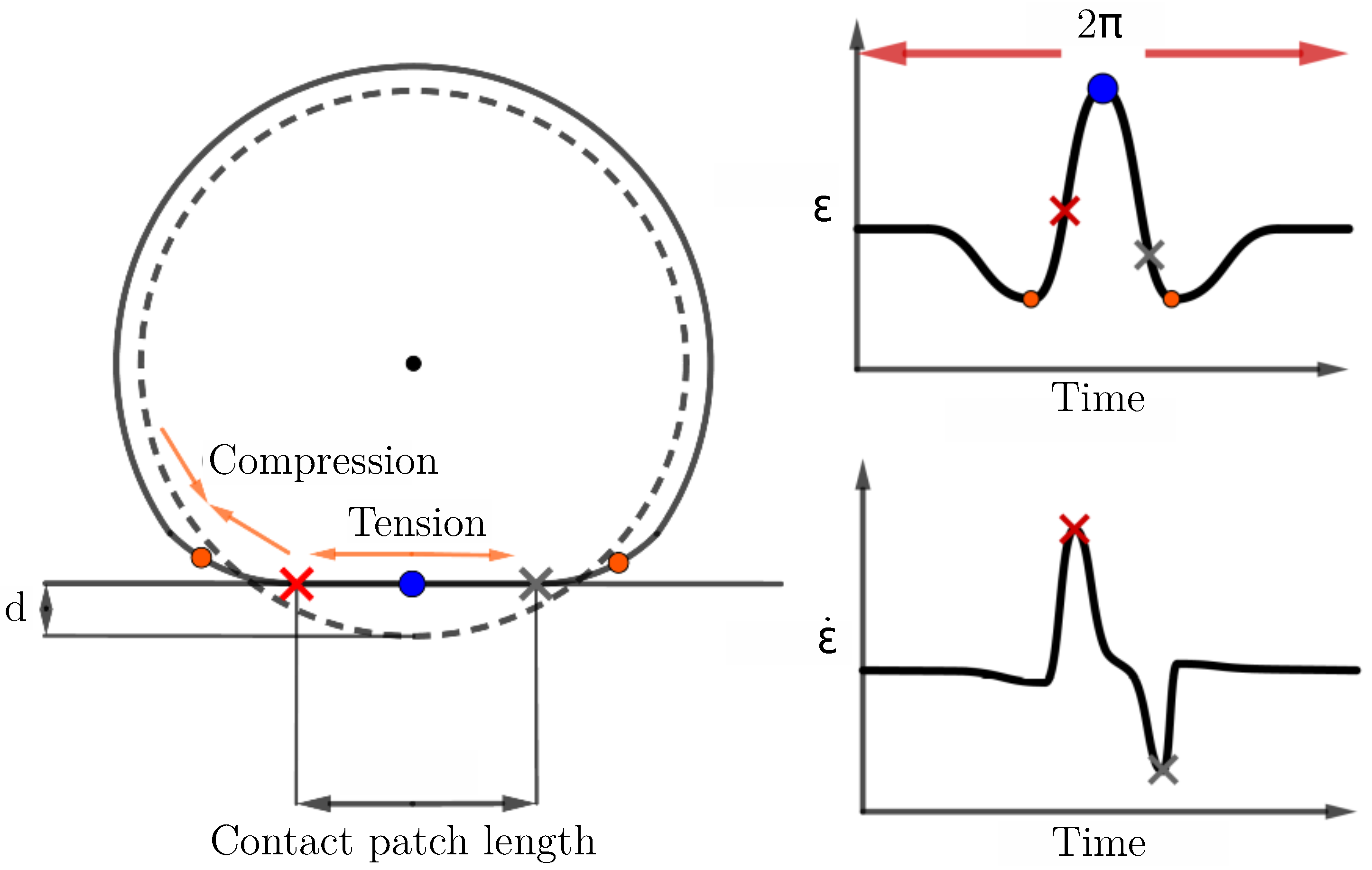
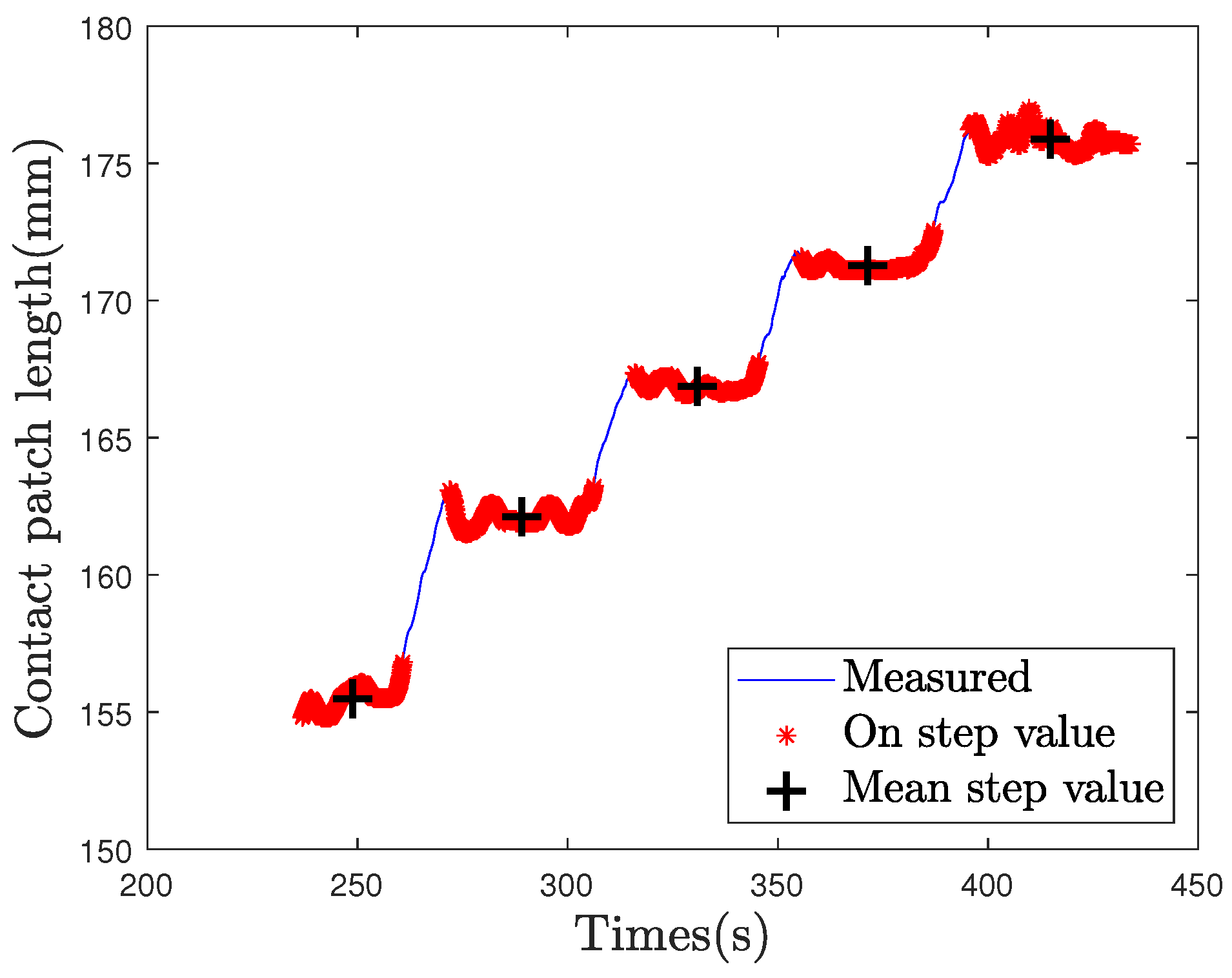
4.4. CPL Computation from DOF Strain Data
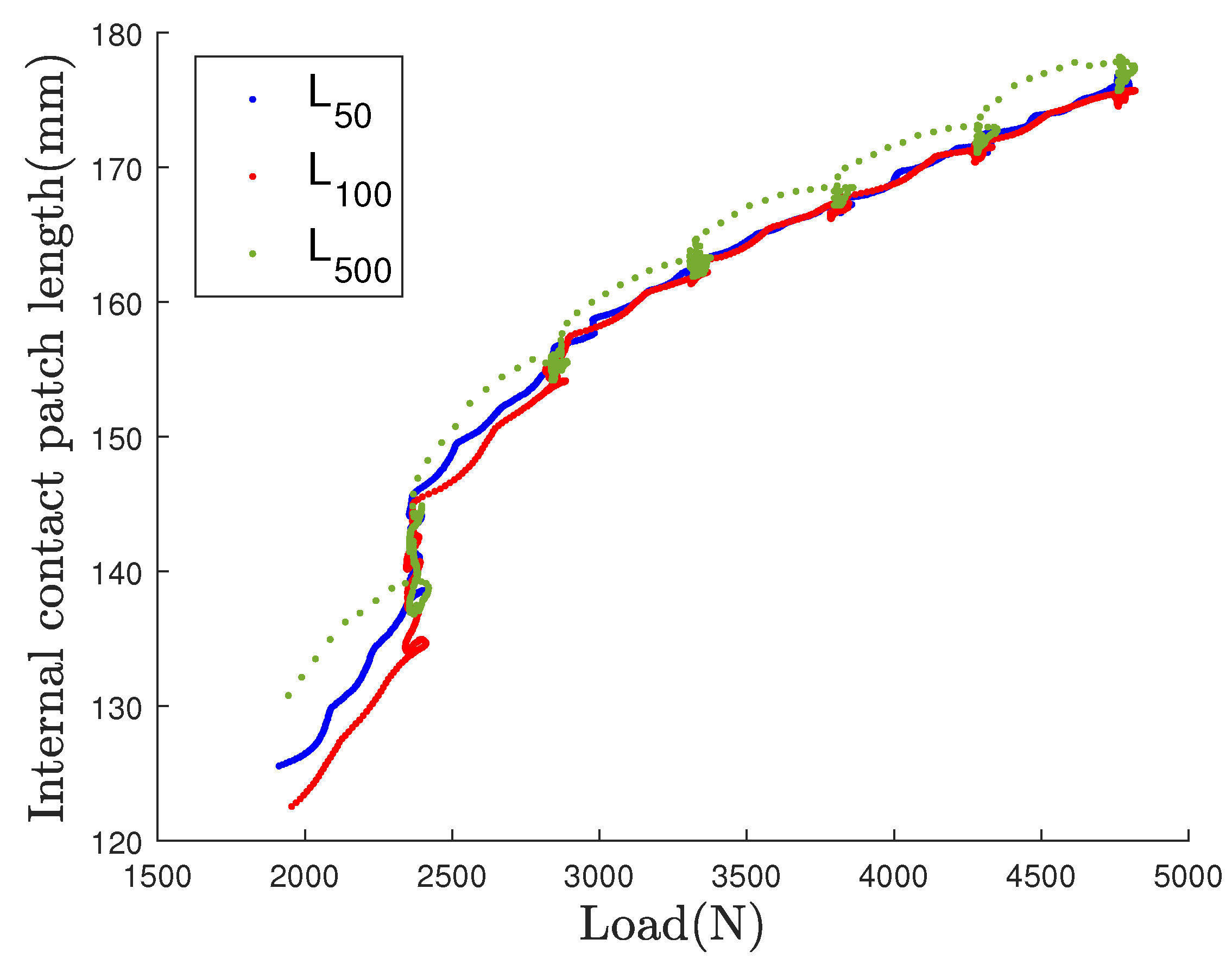
- During the step transition from 2000 N to 2400 N the CPL is highly increasing when reaching and maintaining the 2400 N value, for the three loading cases. This increase of around 10% may be linked to the relaxation of the tire tread rubber, with an applied exceeding the frictional grip force, and resulting to a tread sliding.
- In the following transition step another drifting with a lower magnitude is observed at the beginning of the 2800 N step. It also may be caused by a tread sliding.
- The four loadings from 2800 N to 4800 N are presenting quasi linear relations of the length to the load, for the three loading speeds. CPL is no longer increasing for the periods of steady load; tread sliding seems to not occur again.
- For the higher loading speed , the CPL values on step transitions adopted a curvilinear motion; increasing and decreasing motion. It is linked to the viscoelastic properties of the rubber/steel structure of the tire.
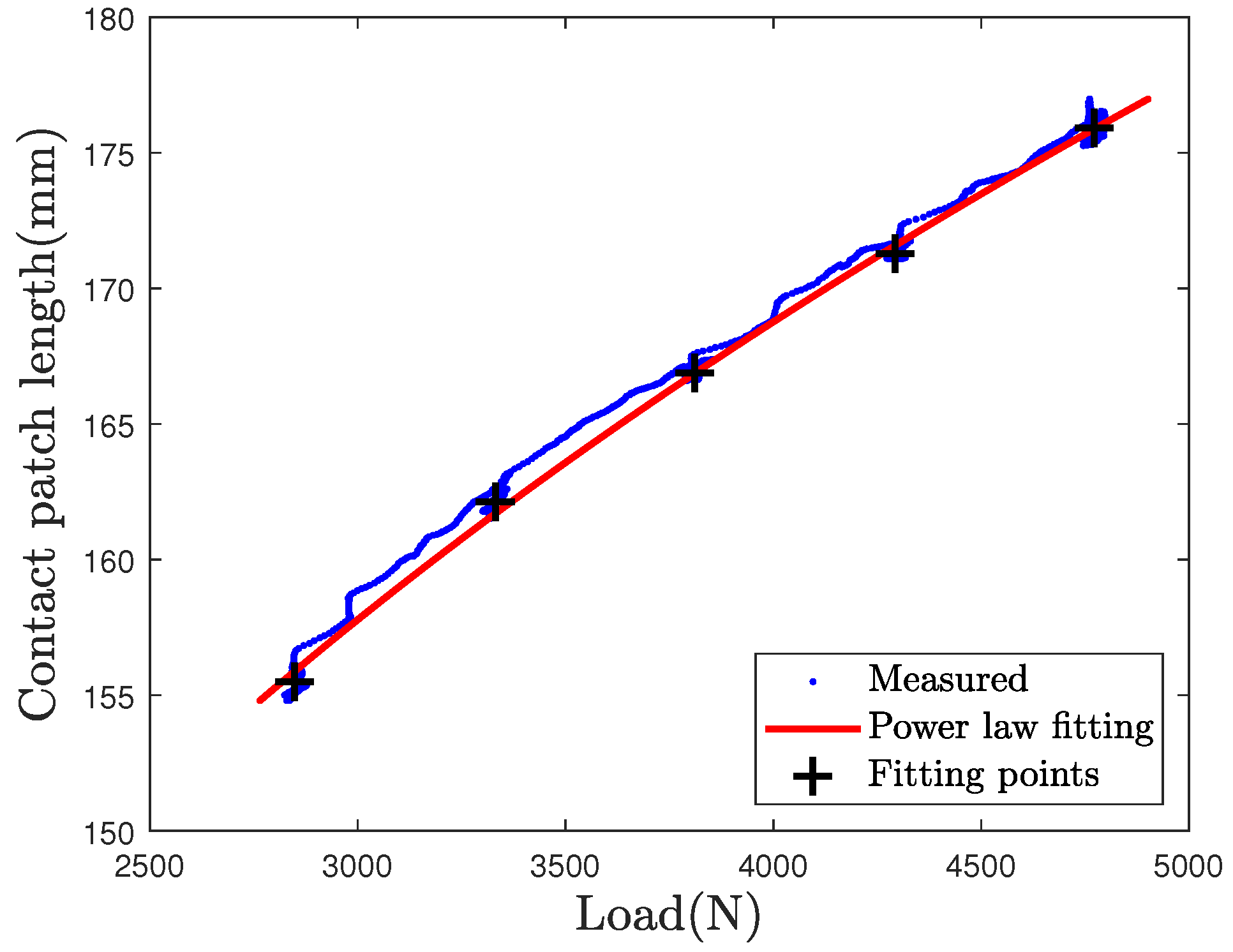
4.5. Load Computation from CPL Data
5. Load Estimation from DOFs and Comparison to Laser Estimation
5.1. Load Estimation for the Loading Case
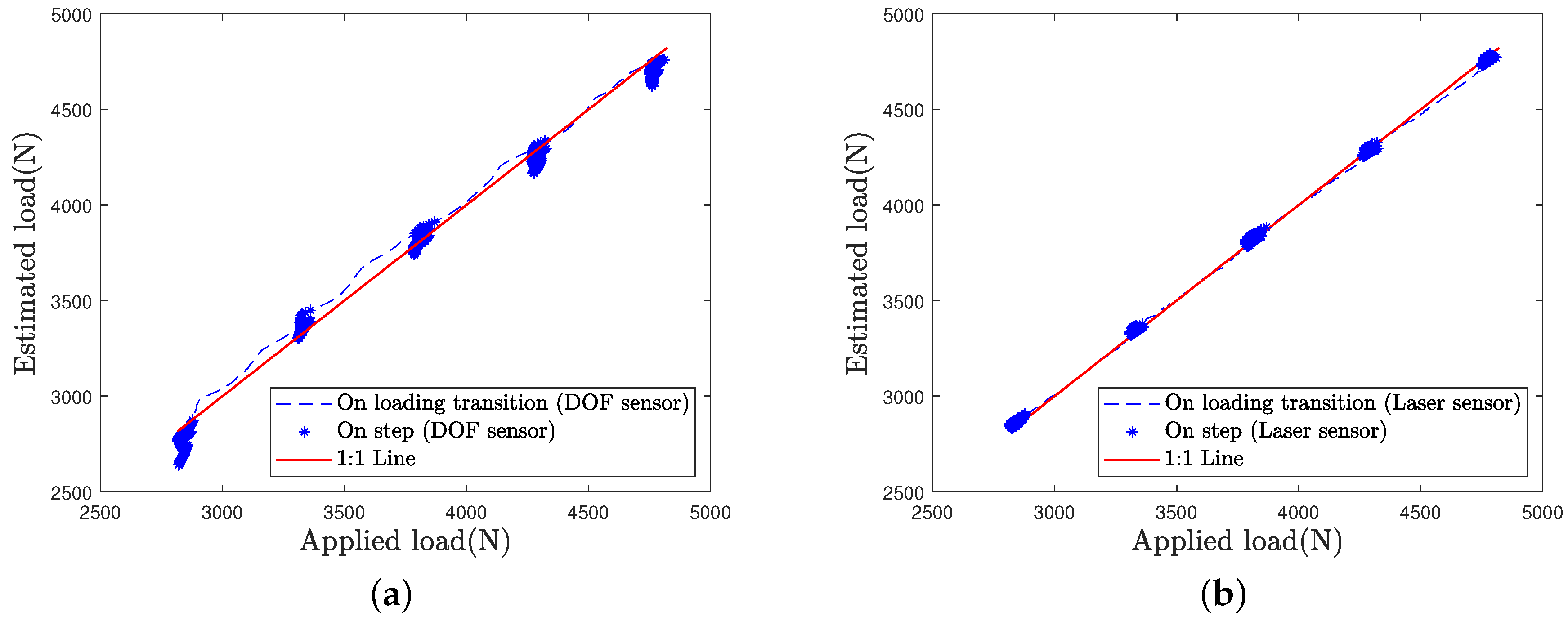
5.2. Load Estimation from Dof Sensor and Comparison to the Laser Sensor Estimation
- Laser mean relative error has always a value lower than 0.76% and is stable through loading increasing. Its RMSPE follows the same behavior with closed values lower than 0.81% which confirms stability of the load estimation from a deflection measurement.
- DOFS mean absolute percentage error on steps reaches three high values of 3.09% ( first step), 2.05 ( first step) and 2.76% ( second step), but other values are lower than 2%.
- RMSPE and mean absolute percentage error value shows that both methods are close but with a higher dispersion for DOF sensor based method.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- CAPTELS Society, France. Available online: http://www.pesage-captels.com/ (accessed on 8 October 2021).
- De Beer, M. Measurement of tyre/pavement interface stresses under moving wheel loads. Int. J. Heavy Veh. Syst. 1996, 3, 97–115. [Google Scholar] [CrossRef]
- Coiret, A.; Orfila, O. Concurrent evaluation of the tire/pavement contact torsor by means of both a dynamometer wheel and a road infrastructure-integrated system. Bull. Lab. Ponts Chaussées 2008, 273, 133–145. [Google Scholar]
- Van Raden, F. Pneumatic Weighing System for Load Carrying Vehicles. U.S. Patent 3,331,458, 18 July 1967. [Google Scholar]
- Tarter, R.E.; Gerstbauer, T.M. Vehicle On-Board Weighting System and Method. U.S. Patent 5,410,109, 25 April 1995. [Google Scholar]
- Hagedorn, T.H.; DeForrest, A.L. Load Measuring System for Leaf Spring Suspensions. U.S. Patent 4,215,754, 5 August 1980. [Google Scholar]
- O’Dea, J.O. On-Board Vehcle Weighting System. U.S. Patent 5,478,974, 26 December 1995. [Google Scholar]
- Fredrickson, D. Weight Sensing Vehicle Hitch. WO Patent WO2016127058A1, 11 August 2016. [Google Scholar]
- Erdogan, G.; Hong, S.; Borrelli, F.; Hedrick, K. Tire Sensors for the Measurement of Slip Angle and Friction Coefficient and Their Use in Stability Control Systems. SAE Int. J. Passeng. Cars Mech. Syst. 2011, 4, 44–58. [Google Scholar] [CrossRef]
- Gnap, J.; Jagelčák, J.; Marienka, P.; Frančák, M.; Kostrzewski, M. Application of MEMS Sensors for Evaluation of the Dynamics for Cargo Securing on Road Vehicles. Sensors 2021, 21, 2881. [Google Scholar] [CrossRef] [PubMed]
- Rodgers, B.; Waddell, W. Tire Engineering. In The Science and Technology of Rubber; Elsevier: Amsterdam, The Netherlands, 2013; pp. 653–695. [Google Scholar] [CrossRef]
- Magori, V.; Magori, V.; Seitz, N. On-line determination of tyre deformation, a novel sensor principle. In Proceedings of the 1998 IEEE Ultrasonics Symposium. Proceedings (Cat. No. 98CH36102), Sendai, Japan, 5–8 October 1998; Volume 1, pp. 485–488. [Google Scholar] [CrossRef]
- Longoria, R.G.; Brushaber, R.; Simms, A. An in-wheel sensor for monitoring tire-terrain interaction: Development and laboratory testing. J. Terramech. 2019, 82, 43–52. [Google Scholar] [CrossRef]
- Tuononen, A.J. Laser triangulation to measure the carcass deflections of a rolling tire. Meas. Sci. Technol. 2011, 22, 125304. [Google Scholar] [CrossRef]
- Xiong, Y.; Tuononen, A. A laser-based sensor system for tire tread deformation measurement. Meas. Sci. Technol. 2014, 25, 115103. [Google Scholar] [CrossRef]
- Nord, S.; Koskinen, S.; Peussa, P. FRICTION—D13 Final Report. 2009. Available online: https://doi.org/10.13140/RG.2.2.27740.72322 (accessed on 8 October 2021).
- Tuononen, A. On-board estimation of dynamic tyre forces from optically measured tyre carcass deflections. Int. J. Heavy Veh. Syst. 2009, 16, 362. [Google Scholar] [CrossRef] [Green Version]
- Rhyne, T.B. Development of a Vertical Stiffness Relationship for Belted Radial Tires. Tire Sci. Technol. 2005, 33, 136–155. [Google Scholar] [CrossRef]
- Coppo, F.; Pepe, G.; Roveri, N.; Carcaterra, A. A Multisensing Setup for the Intelligent Tire Monitoring. Sensors 2017, 17, 576. [Google Scholar] [CrossRef]
- Lee, H.; Kim, M.T.; Taheri, S. Estimation of Tire–Road Contact Features Using Strain-Based Intelligent Tire. Tire Sci. Technol. 2018, 46, 276–293. [Google Scholar] [CrossRef]
- Yang, X. Finite Element Analysis and Experimental Investigation of Tyre Characteristics for Developing Strain-Based Intelligent Tyre System. Ph.D. Thesis, College of Engineering and Physical Sciences of the University of Birmingham, The University of Birmingham, Birmingham, UK, 2011. [Google Scholar]
- Ballo, F.; Previati, G.; Gobbi, M.; Mastinu, G. A Semi-Analytical Tyre Model for the Study of Tyre/Rim Interaction on a Road Vehicle. In Volume 3: 19th International Conference on Advanced Vehicle Technologies; 14th International Conference on Design Education; 10th Frontiers in Biomedical Devices; American Society of Mechanical Engineers: Cleveland, OH, USA, 2017; p. V003T01A003. [Google Scholar] [CrossRef]
- Padula, S. The Pneumatic Tire, Chapter 5 Load Capacity.pdf. Available online: https://www.nhtsa.gov/staticfiles/safercar/pdf/PneumaticTire_HS-810-561.pdf (accessed on 8 October 2021).
- Roveri, N.; Pepe, G.; Carcaterra, A. OPTYRE—A new technology for tire monitoring: Evidence of contact patch phenomena. Mech. Syst. Signal Process. 2016, 66–67, 793–810. [Google Scholar] [CrossRef]
- Lee, H.; Taheri, S. A novel approach to tire parameter identification. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 233, 55–72. [Google Scholar] [CrossRef]
- Breglio, G.; Fienga, F.; Irace, A.; Russo, M.; Strano, S.; Terzo, M. Fiber Bragg Gratings for Strain and Temperature Measurements in a Smart Tire. 2017, p. 6. Available online: http://www.iaeng.org/publication/WCE2017/WCE2017_pp759-763.pdf (accessed on 8 October 2021).
- Garcia-Pozuelo, D.; Olatunbosun, O.; Strano, S.; Terzo, M. A real-time physical model for strain-based intelligent tires. Sens. Actuators A Phys. 2019, 288, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Matsuzaki, R.; Hiraoka, N.; Todoroki, A.; Mizutani, Y. Analysis of Applied Load Estimation Using Strain for Intelligent Tires. J. Solid Mech. Mater. Eng. 2010, 4, 1496–1510. [Google Scholar] [CrossRef] [Green Version]
- Hiroshi, M. Method for Estimating Tire Wear and Apparatus for Estimating Tire Wear. U.S. Patent 848396B2, 9 July 2013. [Google Scholar]
- Jeong, D.; Lee, J.; Choi, S.; Kim, M. Load Estimation of Intelligent Tires Equipped with Acceleration Sensors. In Proceedings of the 2019 IEEE Sensors Applications Symposium (SAS), Sophia Antipolis, France, 11–13 March 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Singh, K.B.; Taheri, S. Accelerometer Based Method for Tire Load and Slip Angle Estimation. Vibration 2019, 2, 174–186. [Google Scholar] [CrossRef] [Green Version]
- Savaresi, S.; Tanelli, M.; Langthaler, P.; Del Re, L. New Regressors for the Direct Identification of Tire Deformation in Road Vehicles Via “In-Tire” Accelerometers. IEEE Trans. Control Syst. Technol. 2008, 16, 769–780. [Google Scholar] [CrossRef]
- Matilainen, M.; Tuononen, A. Tyre contact length on dry and wet road surfaces measured by three-axial accelerometer. Mech. Syst. Signal Process. 2015, 52–53, 548–558. [Google Scholar] [CrossRef]
- Braghin, F.; Brusarosco, M.; Cheli, F.; Cigada, A.; Manzoni, S.; Mancosu, F. Measurement of contact forces and patch features by means of accelerometers fixed inside the tire to improve future car active control. Veh. Syst. Dyn. 2006, 44, 3–13. [Google Scholar] [CrossRef]
- Fontaine, M.; Chapeleau, X.; Baltazarta, V.; Guéguena, I.; Cottineau, L.; Cesbron, J.; Bétaille, D.; Coudouel, D. Static in-tire circumferential strain signature using Rayleigh scattering fiber optic technology: Preliminary results. In 8th Transport Research Arena; Traficom Research Reports 7/2020; Finnish Transport and Communications Agency Traficom: Helsinki, Finland, 2020; ISBN 978-952-311-484-5. Available online: https://www.traficom.fi/sites/default/files/media/publication/TRA2020-Book-of-Abstract-Traficom-research-publication.pdf (accessed on 8 October 2021).
- Froggatt, M.; Moore, J. High-spatial-resolution distributed strain measurement in optical fiber with Rayleigh scatter. Appl. Opt. 1998, 37, 1735. [Google Scholar] [CrossRef]
- Bassil, A.; Wang, X.; Chapeleau, X.; Niederleithinger, E.; Abraham, O.; Leduc, D. Distributed Fiber Optics Sensing and Coda Wave Interferometry Techniques for Damage Monitoring in Concrete Structures. Sensors 2019, 19, 356. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Johnson, K. Contact Mechanics; Cambridge University Press: Cambridge, UK, 1985. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Sensor Type | Aim |
|---|---|---|
| [12] | Ultrasonic sensor | Proof of concept, radial displacement profile sensing and deflection-load relationship identification |
| [13] | Three aligned ultrasonic sensors | Deflection sensing, identification of CPL and speed, load and pressure influence, radial stiffness estimation |
| [14] | Laser | Proof of concept, radial displacement profile sensing, influence quantities identification |
| [15] | Laser | CPL identification and behavior through different pressure, speed and load |
| [16] | IR - PSD | Deflection sensing, deflection-load relationship |
| Reference | Strain Direction Circumferential (C), Transversal (T) | Estimated Characteristic | Method/Model | Sensor or Evaluation Mean | Vertical Load Relationship |
|---|---|---|---|---|---|
| [19,24] | C | CPL | Differentiation and peak to peak | FBG | Not defined |
| [20] | C | CPL | Differentiation and peak to peak | Gauges | Not defined |
| [25] | C | Radial displacement and CPL | Flexible ring model (displacement) and peak to peak | Strain gauges | Linear relationship |
| [26] | C/ T | Strain value and CPL | Differentiation and peak to peak (CPL identification) | FBG | Not defined |
| [27] | C | Displacement | Flexible ring model on viscous foundation | Gauges | Flexible ring model |
| [28] | C | CPL and strain value | Differentiation peak to peak | FEM (simulation) | Integral of circumferential strain |
| Reference | Acceleration Direction: Radial (R), Circumferential (C) | Estimated Characteristic | Method | Sensor | Vertical Load Relationship |
|---|---|---|---|---|---|
| [30] | C | CPL | Peak to peak | Tri-axial | Flexible ring model |
| [31] | R | CPL and Radial max displacement (Comparison) | Zero crossing(CPL)/Double integration | Tri-axial | Recursive least square fitting |
| [32] | R | CPL | Zero crossing acceleration profile | One axis accelerometer | Identification of correlation between CPL and load |
| [33] | R/C | CPL | R.: Zero crossing/C.: Peak to peak | Tri-axial accelerometer | Identification of linear relationship (load vs CPL) |
| [34] | C | CPL | Peak to peak | Tri-axial | Calibration |
| Step Load | Applied (N) | Mean Absolute Percentage Error (Laser Sensor) | Mean Absolute Percentage Error (DOFs) | RMSPE (Laser Sensor) | RMSPE (DOFs) |
|---|---|---|---|---|---|
| 1 | 2850 | 0.28 | 1.14 | 0.35 | 1.41 |
| 2 | 3330 | 0.21 | 1.16 | 0.26 | 1.30 |
| 3 | 3810 | 0.25 | 0.40 | 0.30 | 0.50 |
| 4 | 4290 | 0.15 | 0.83 | 0.19 | 0.91 |
| 5 | 4770 | 0.19 | 0.80 | 0.26 | 0.95 |
| Step Load | Applied (N) | Mean Absolute Percentage Error (Laser Sensor) | Mean Absolute Percentage Error (DOFs) | RMSPE (Laser Sensor) | RMSPE (DOFs) |
|---|---|---|---|---|---|
| 1 | 2840 | 0.27 | 3.09 | 0.32 | 3.34 |
| 2 | 3320 | 0.36 | 0.63 | 0.41 | 0.80 |
| 3 | 3810 | 0.46 | 0.48 | 0.51 | 0.60 |
| 4 | 4280 | 0.25 | 1.48 | 0.30 | 1.60 |
| 5 | 4770 | 0.18 | 1.77 | 0.21 | 1.89 |
| Step Load | Applied (N) | Mean Absolute Percentage Error (Laser Sensor) | Mean Absolute Percentage Error (DOFs) | RMS Percentage Error (Laser Sensor) | RMS Percentage Error (DOFs) |
|---|---|---|---|---|---|
| 1 | 2850 | 0.43 | 2.05 | 0.50 | 2.45 |
| 2 | 3330 | 0.66 | 2.76 | 0.72 | 3.20 |
| 3 | 3810 | 0.76 | 1.64 | 0.81 | 1.87 |
| 4 | 4290 | 0.46 | 0.67 | 0.51 | 1.16 |
| 5 | 4770 | 0.30 | 1.51 | 0.35 | 1.80 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fontaine, M.; Coiret, A.; Cesbron, J.; Baltazart, V.; Bétaille, D. In-Tire Distributed Optical Fiber (DOF) Sensor for the Load Assessment of Light Vehicles in Static Conditions. Sensors 2021, 21, 6874. https://doi.org/10.3390/s21206874
Fontaine M, Coiret A, Cesbron J, Baltazart V, Bétaille D. In-Tire Distributed Optical Fiber (DOF) Sensor for the Load Assessment of Light Vehicles in Static Conditions. Sensors. 2021; 21(20):6874. https://doi.org/10.3390/s21206874
Chicago/Turabian StyleFontaine, Martin, Alex Coiret, Julien Cesbron, Vincent Baltazart, and David Bétaille. 2021. "In-Tire Distributed Optical Fiber (DOF) Sensor for the Load Assessment of Light Vehicles in Static Conditions" Sensors 21, no. 20: 6874. https://doi.org/10.3390/s21206874
APA StyleFontaine, M., Coiret, A., Cesbron, J., Baltazart, V., & Bétaille, D. (2021). In-Tire Distributed Optical Fiber (DOF) Sensor for the Load Assessment of Light Vehicles in Static Conditions. Sensors, 21(20), 6874. https://doi.org/10.3390/s21206874