Intelligent Fault Diagnosis of Hydraulic Piston Pump Based on Wavelet Analysis and Improved AlexNet




Abstract
1. Introduction
2. Continuous Wavelet Transform
3. Convolutional Neural Network
3.1. Convolutional Layer
3.2. Pooling Layer
3.3. Softmax Classification
4. Intelligent Diagnosis Method Combining Wavelet Time-Frequency Analysis with Improved AlexNet Model
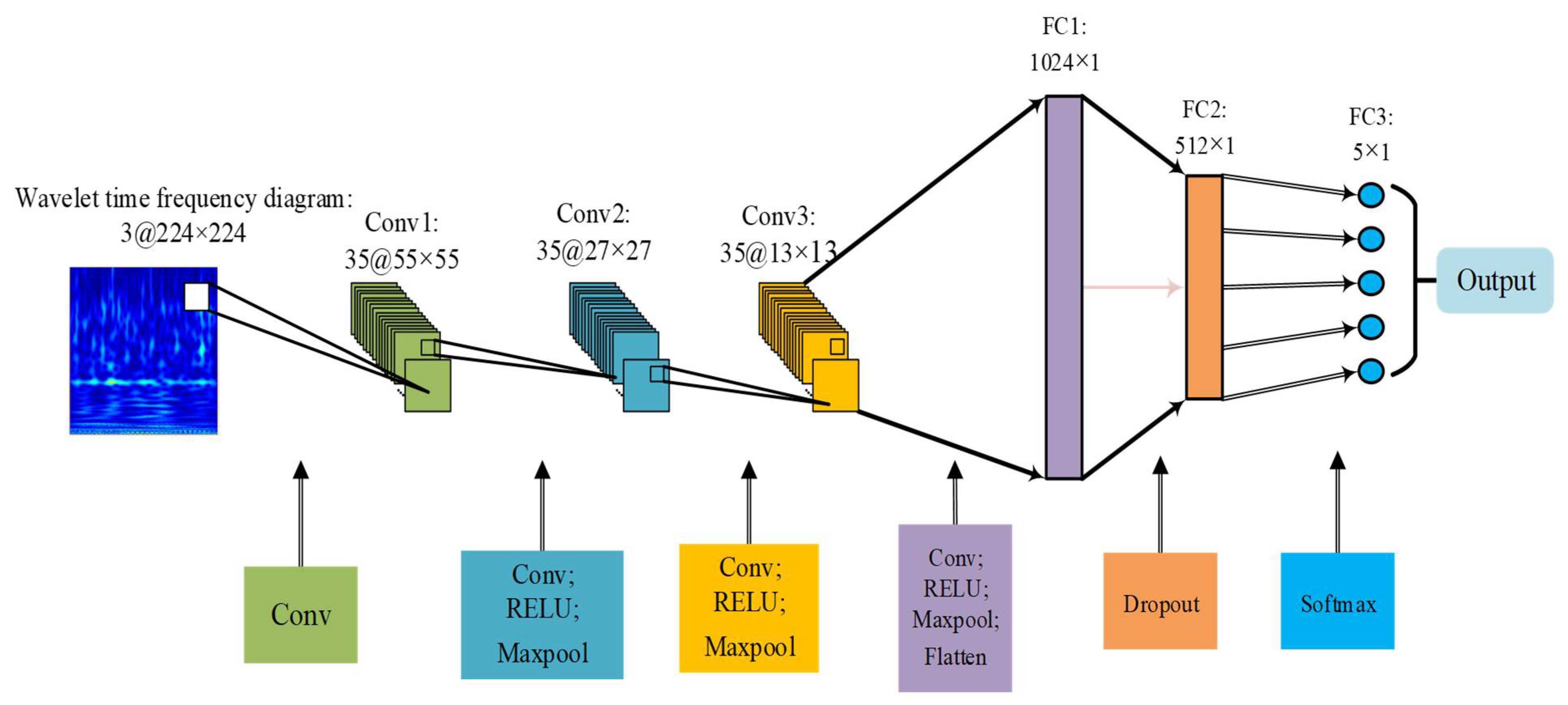
4.1. Improvement of AlexNet Network Model
4.2. Network Model Training Process
4.3. Process of the Intelligent Fault Diagnosis Method
- (1)
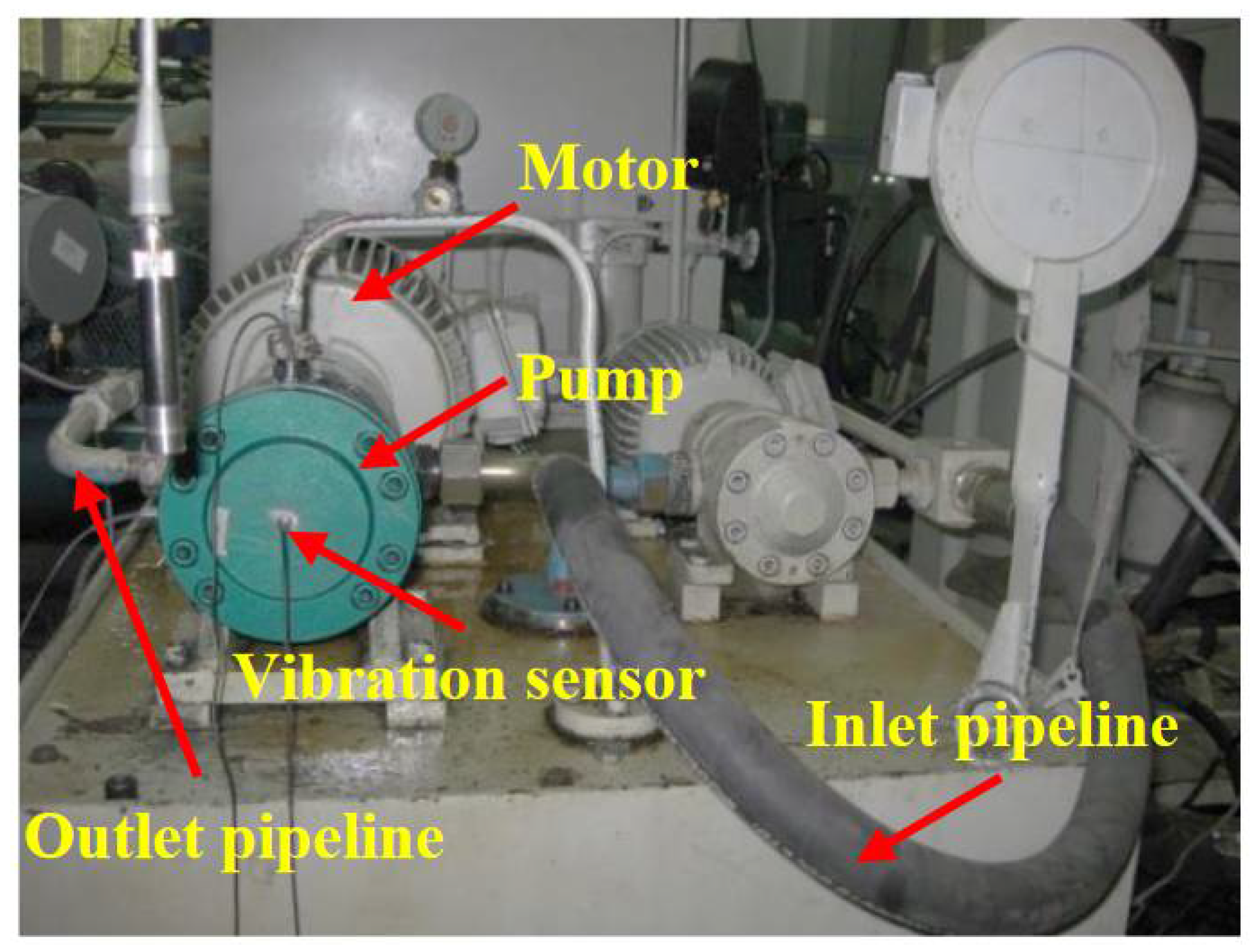
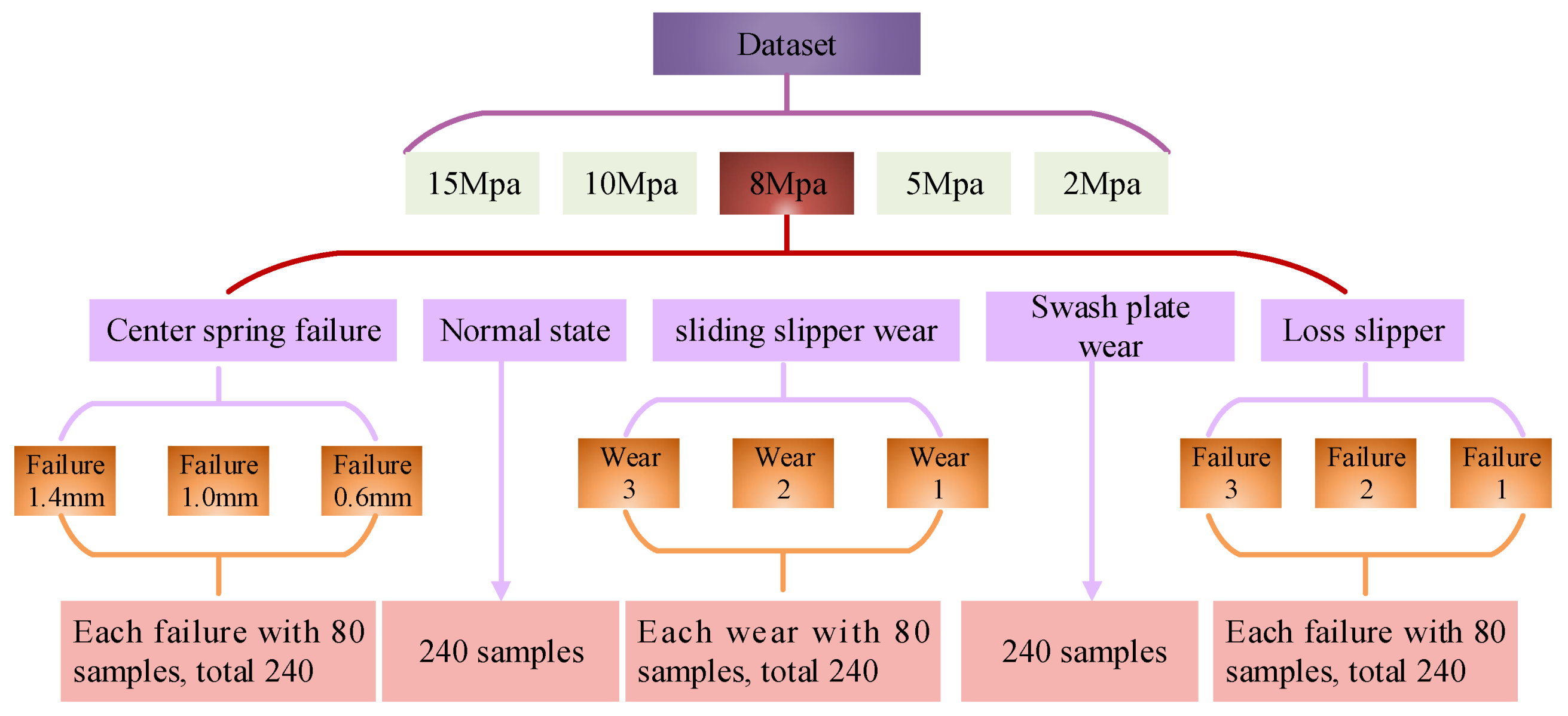
- The signal dataset is constructed by collecting the vibration signals of the piston pump test bench under different conditions. Then samples are constructed through the sliding window, and the length of each sample is 1024.
- (2)
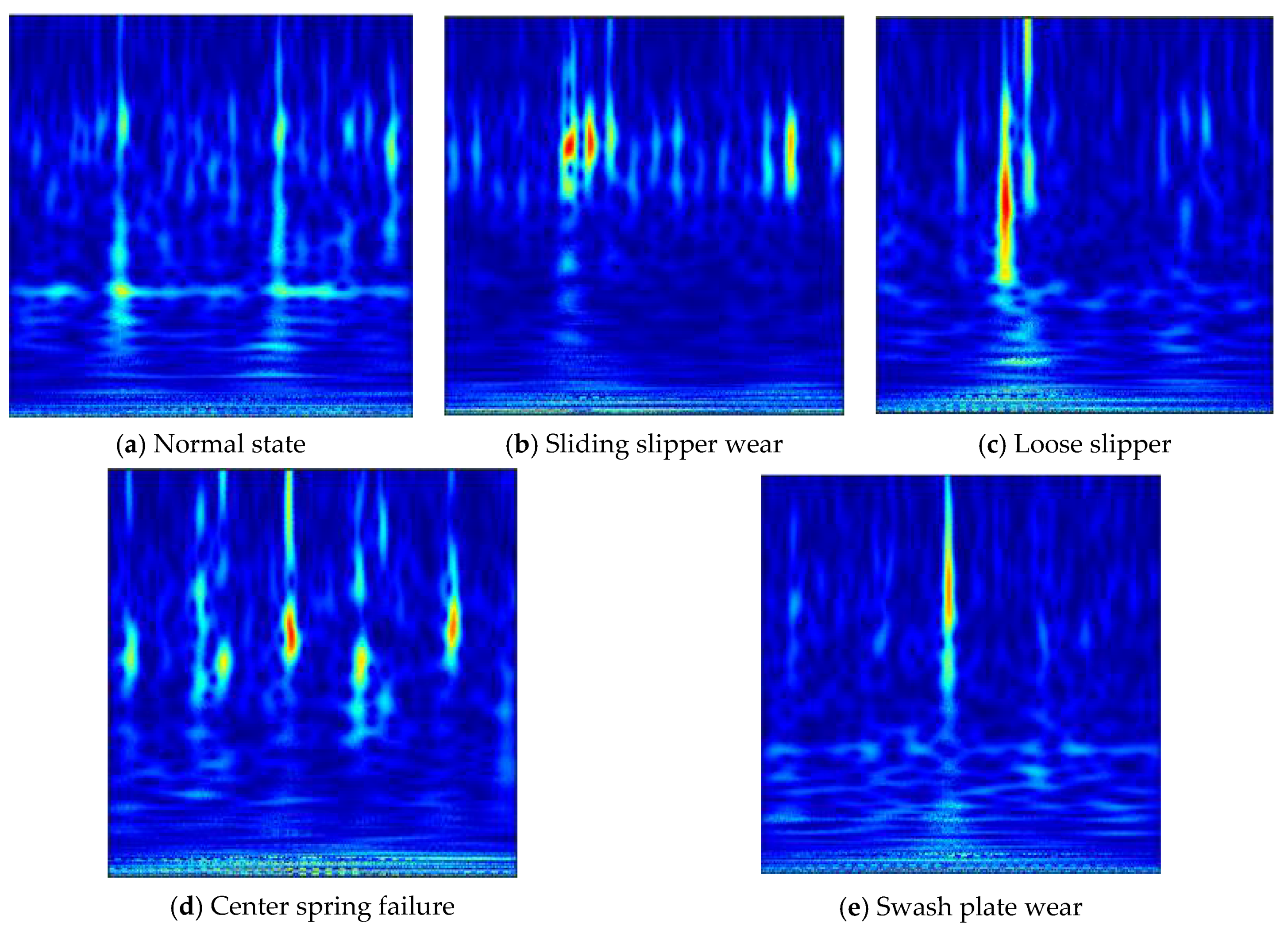
- Wavelet transform on the divided vibration signal dataset is performed to achieve the time-frequency distribution of one-dimensional time series, and 3-channel time-frequency images are generated. The division of dataset is in the following: the training sets account for 70% and the test sets account for 30%.
- (3)
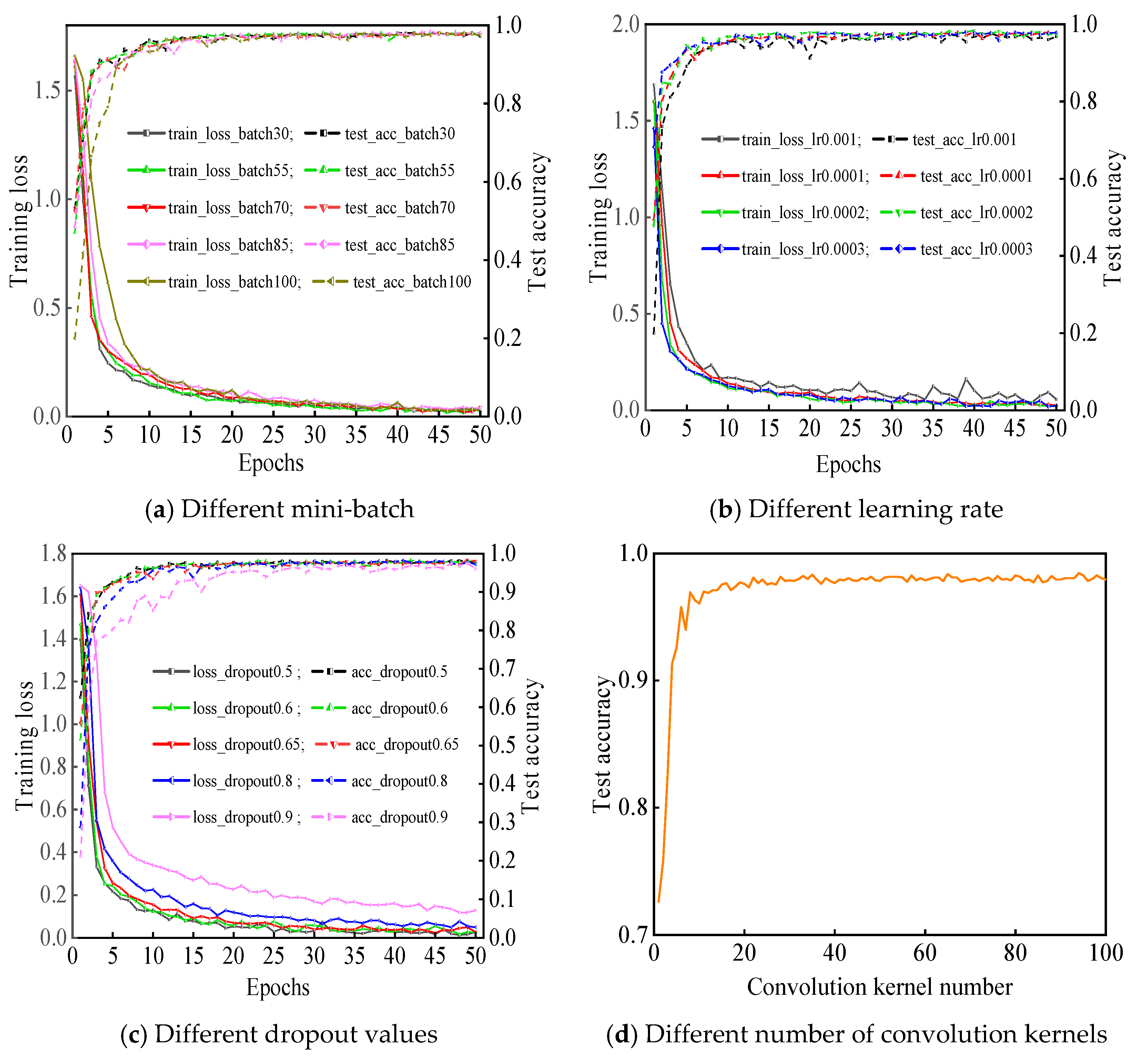
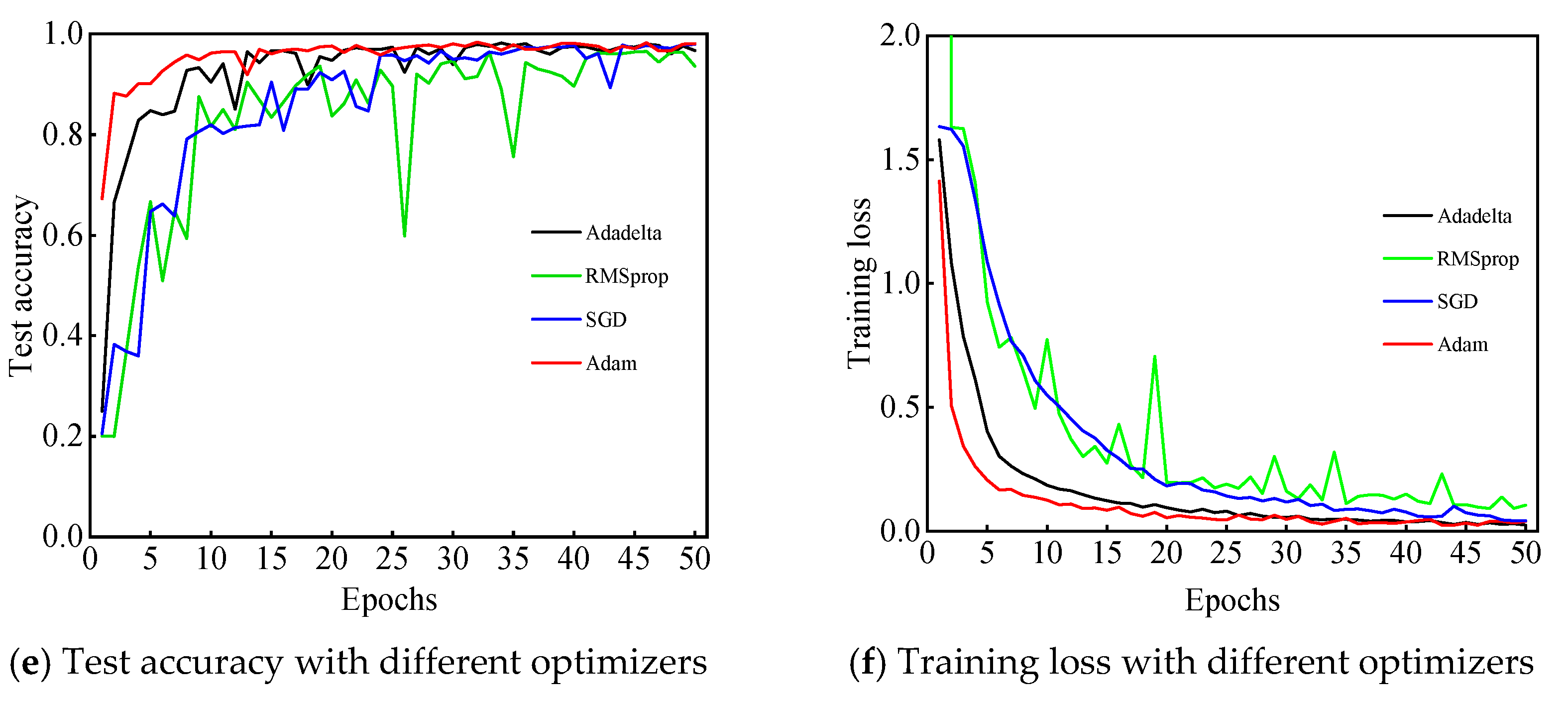
- The structural parameters of the diagnostic model are preliminarily set, such as learning rate, dropout value, the number of convolution kernel, and so on. Then a CNN structure based on the improved AlexNet model is established.
- (4)
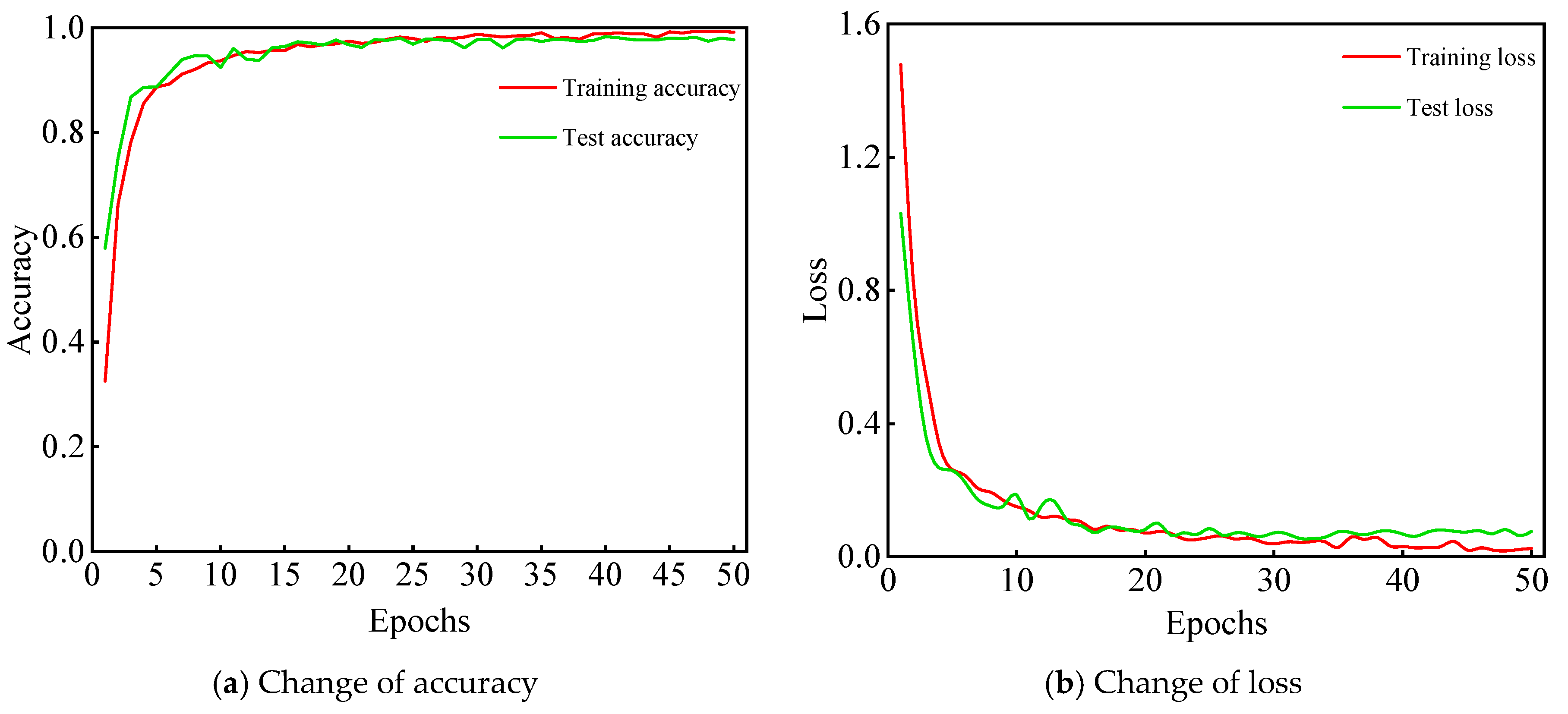
- The training loss and test accuracy of the model are taken as evaluation indicator to select structural parameters through numerous experiments.
- (5)
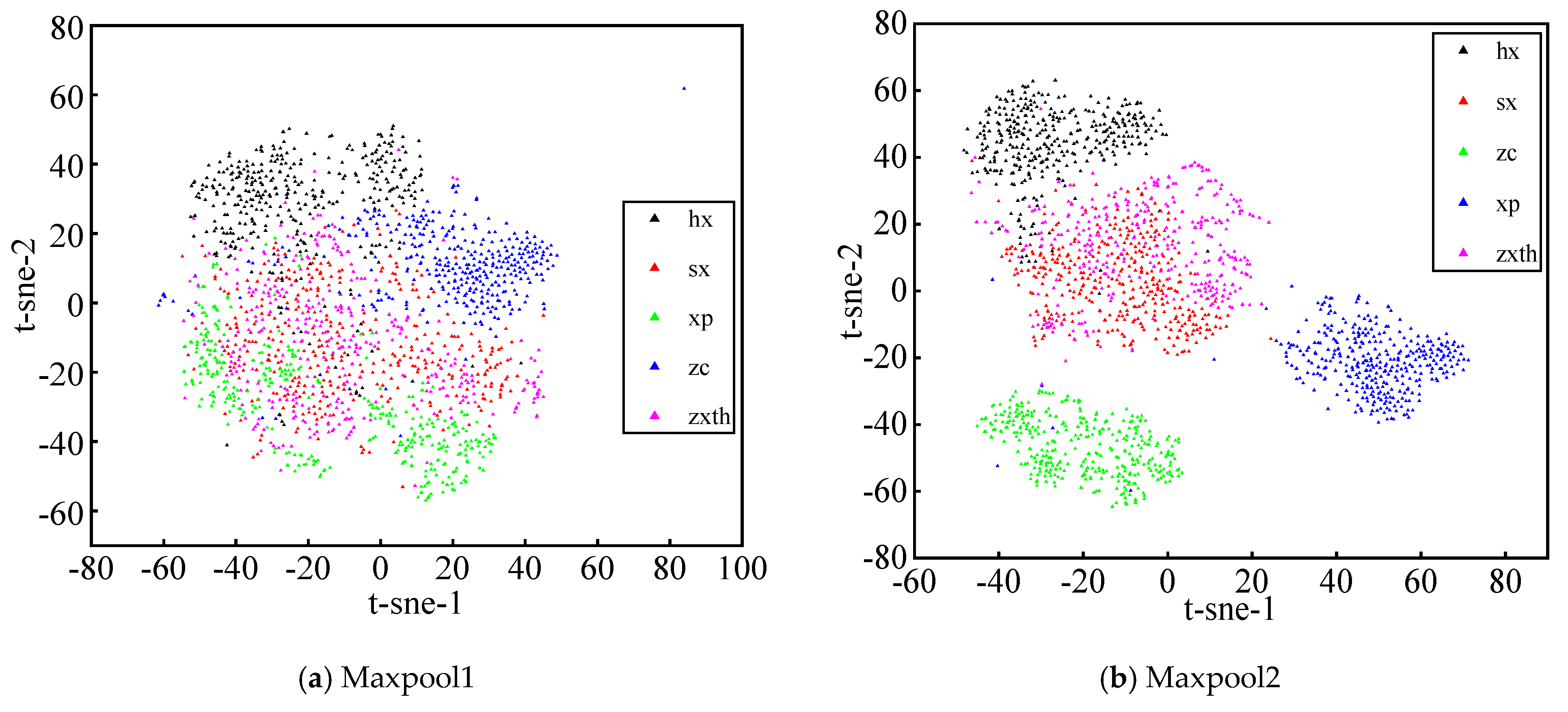
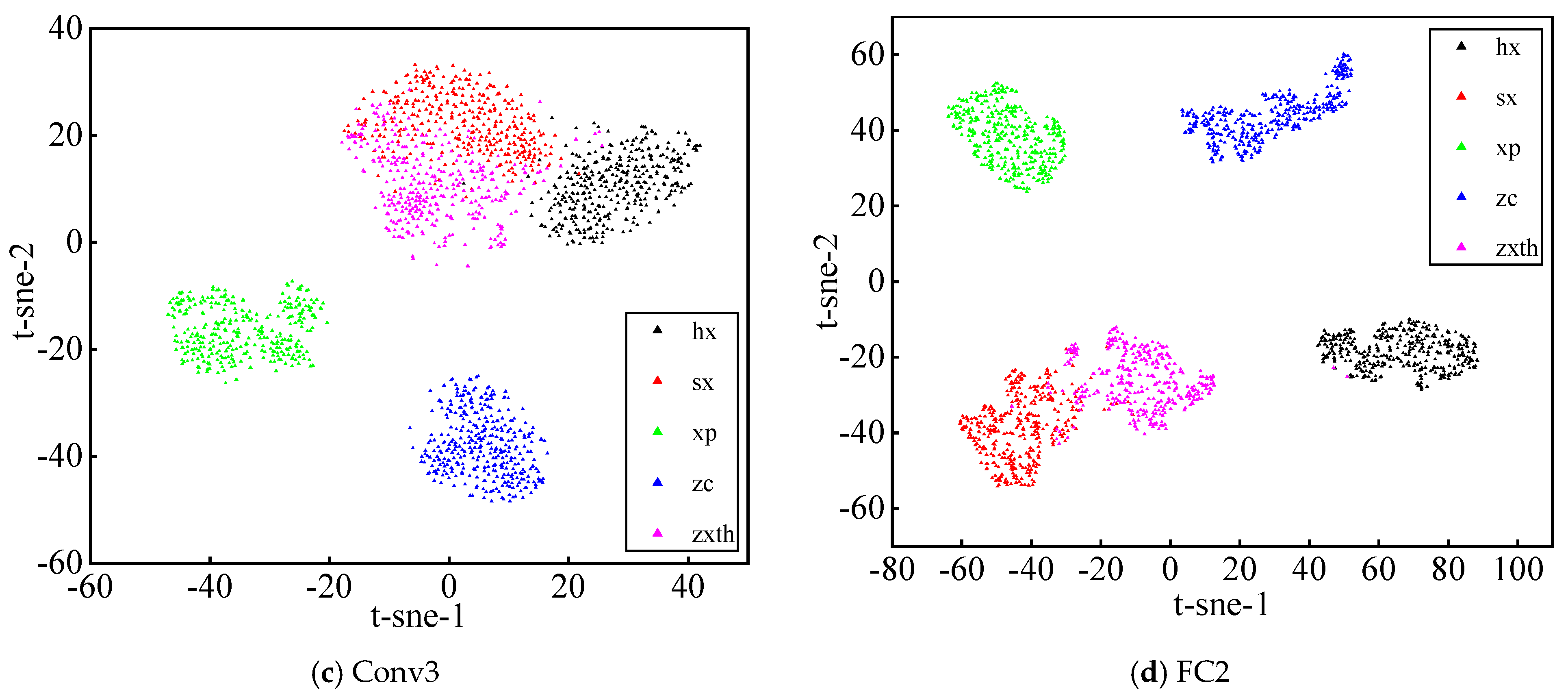
- Through the above steps, the structural parameters of the neural network model are determined. Then, the training samples, test samples are input into the network model to retrain and verify the learning effect of the model, and t-distributed stochastic neighbor embedding (t-SNE) is utilized to visualize the effect of feature extraction.
- (6)
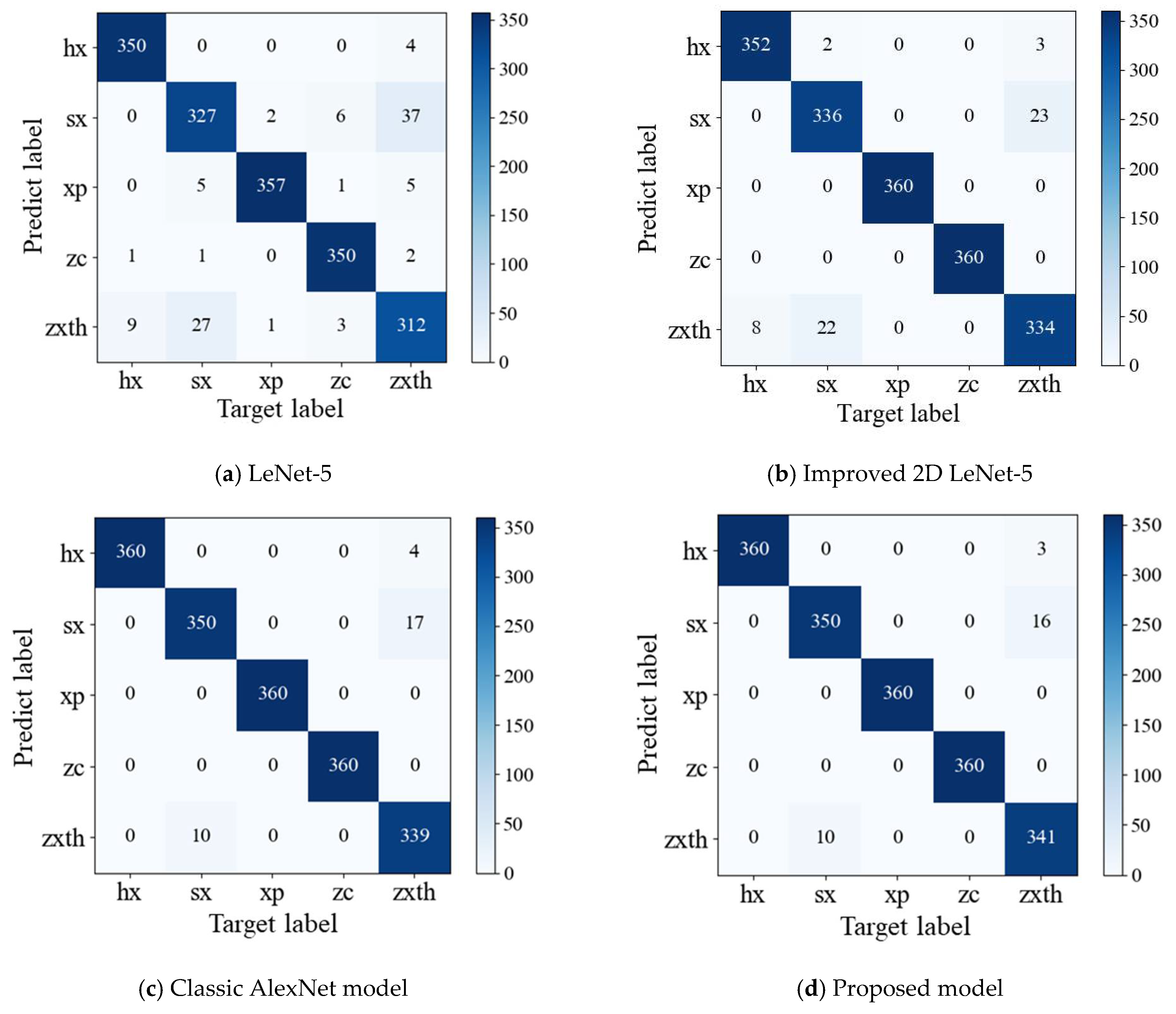
- To further validate the diagnosis property of proposed model, the following deep models are used for comparisons, involving classic, improved 2D LeNet-5, classic LeNet-5, and classic AlexNet.
5. Experimental Verification
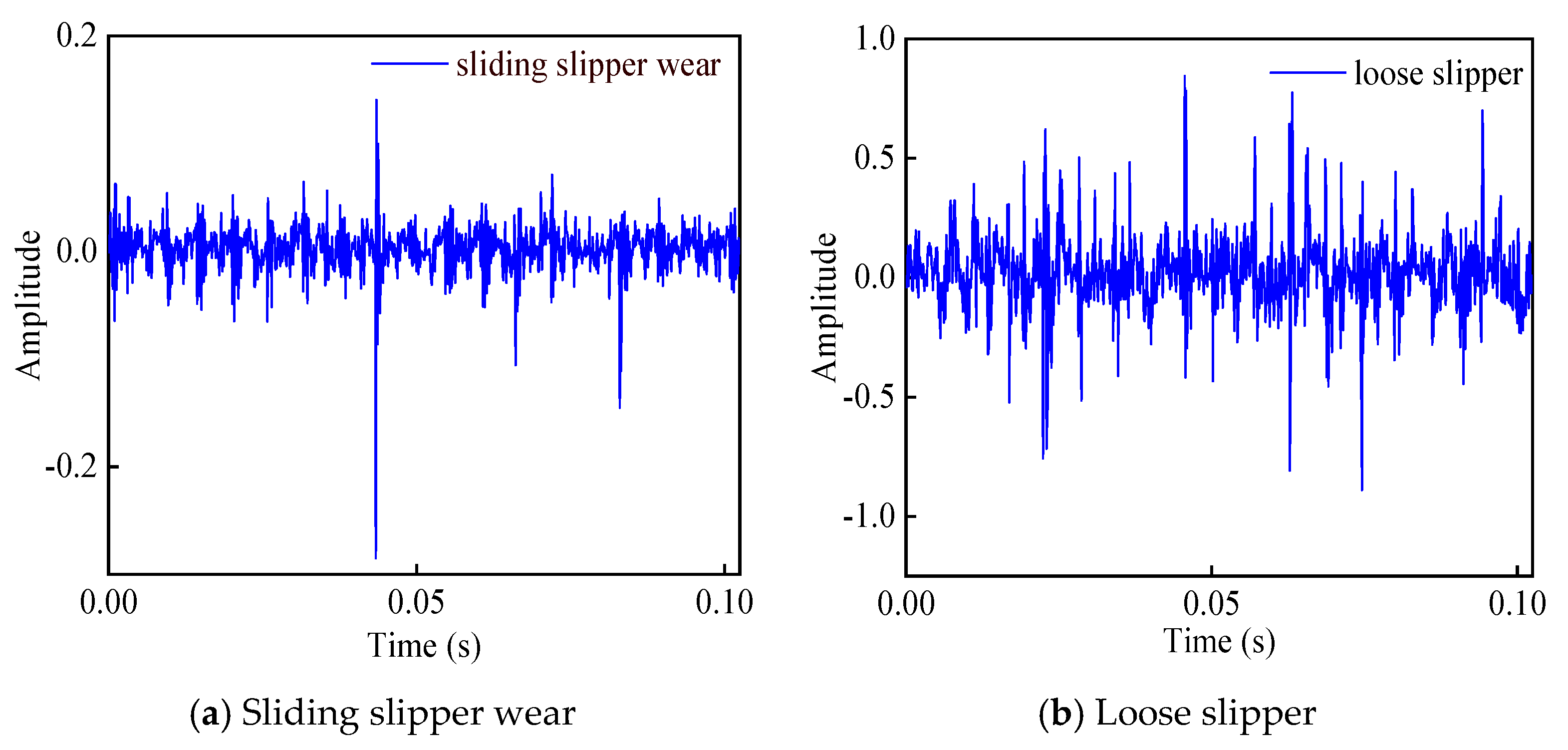
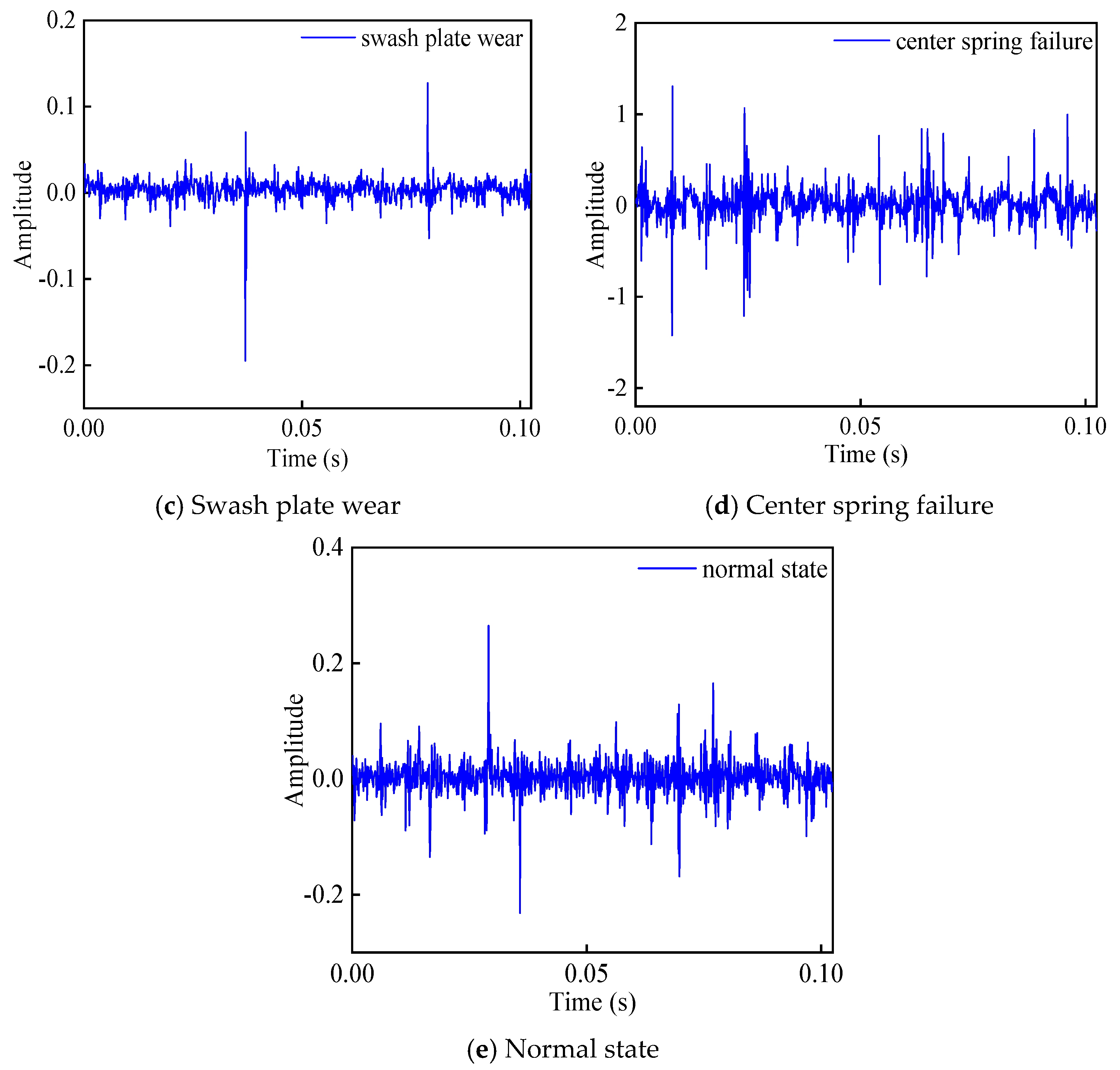
5.1. Sample Set
5.2. Optimal Selection of Model Structure Parameters
5.3. Fault Diagnosis Based on CWT-AlexNet
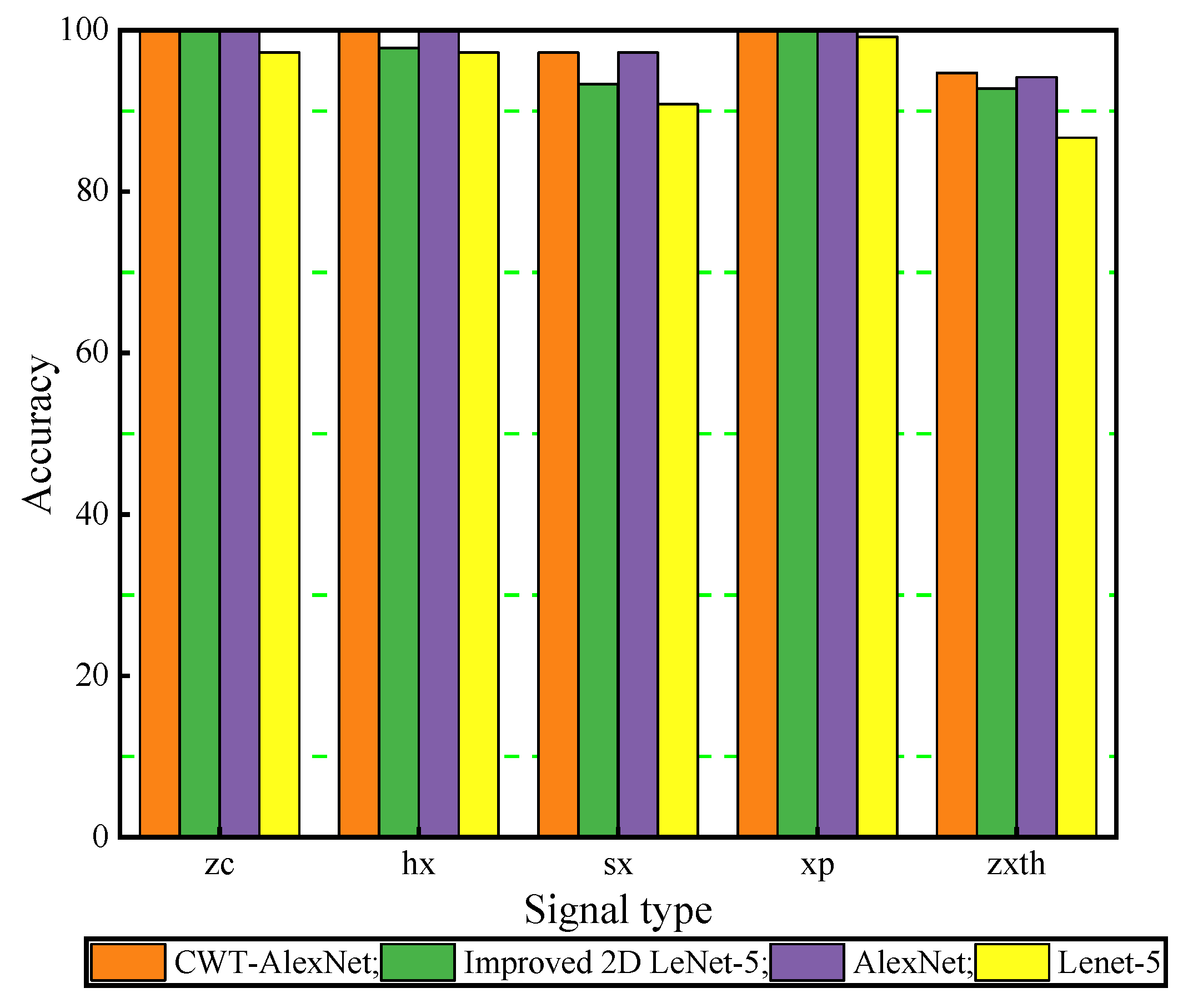
5.4. Comparative Verification
6. Conclusions
- (1)
- The structure of AlexNet network is improved through reducing the number of parameters and calculation complexity of each layer. The proposed model can extract features from the vibration signals of the piston pump in different states and identify various fault types effectively. The recognition accuracy of the normal state, sliding slipper wear, and wear swash plate fault can reach 100%, the recognition accuracy of the loose slipper fault can reach 97.22%, and the recognition accuracy of the center spring failure can reach 94.72%.
- (2)
- Compared with standard LeNet-5 network, standard AlexNet network and improved 2D LeNet-5 network, the proposed CWT-AlexNet model has the highest recognition accuracy for five fault types of the piston pump, and the proposed model has strong robustness.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ye, S.; Zhang, J.; Xu, B.; Zhu, S.; Xiang, J.; Tang, H. Theoretical investigation of the contributions of the excitation forces to the vibration of an axial piston pump. Mech. Syst. Signal Process. 2019, 129, 201–217. [Google Scholar] [CrossRef]
- Tang, S.; Yuan, S.; Zhu, Y. Data Preprocessing Techniques in Convolutional Neural Network Based on Fault Diagnosis Towards Rotating Machinery. IEEE Access 2020, 8, 149487–149496. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, F.; Yuan, S. Effect of unrans and hybrid rans-les turbulence models on unsteady turbulent flows inside a side channel pump. ASME J. Fluids Eng. 2020, 142, 061503. [Google Scholar] [CrossRef]
- Zhang, F.; Appiah, D.; Hong, F.; Zhang, J.; Yuan, S.; Adu-Poku, K.A.; Wei, X. Energy loss evaluation in a side channel pump under different wrapping angles using entropy production method. Int. Commun. Heat Mass Transf. 2020, 113, 104526. [Google Scholar] [CrossRef]
- Zheng, Z.; Li, X.; Zhu, Y. Feature extraction of the hydraulic pump fault based on improved Autogram. Measurement 2020, 163, 107908. [Google Scholar] [CrossRef]
- Tang, S.; Yuan, S.; Zhu, Y. Cyclostationary Analysis towards Fault Diagnosis of Rotating Machinery. Processes 2020, 8, 1217. [Google Scholar] [CrossRef]
- Tang, S.; Yuan, S.; Zhu, Y. Convolutional Neural Network in Intelligent Fault Diagnosis Toward Rotatory Machinery. IEEE Access 2020, 8, 86510–86519. [Google Scholar] [CrossRef]
- Xie, Y.; Xiao, Y.; Liu, X.; Liu, G.; Jiang, W.; Qin, J. Time-Frequency Distribution Map-Based Convolutional Neural Network (CNN) Model for Underwater Pipeline Leakage Detection Using Acoustic Signals. Sensors 2020, 20, 5040. [Google Scholar] [CrossRef]
- Hoang, D.-T.; Kang, H. A survey on Deep Learning based bearing fault diagnosis. Neurocomputing 2019, 335, 327–335. [Google Scholar] [CrossRef]
- Renström, N.; Bangalore, P.; Highcock, E. System-wide anomaly detection in wind turbines using deep autoencoders. Renew. Energy 2020, 157, 647–659. [Google Scholar] [CrossRef]
- Yulita, I.N.; Fanany, M.I.; Arymuthy, A.M. Bi-directional Long Short-Term Memory using Quantized data of Deep Belief Networks for Sleep Stage Classification. Procedia Comput. Sci. 2017, 116, 530–538. [Google Scholar] [CrossRef]
- Tang, S.; Yuan, S.; Zhu, Y. Deep Learning-Based Intelligent Fault Diagnosis Methods Toward Rotating Machinery. IEEE Access 2020, 8, 9335–9346. [Google Scholar] [CrossRef]
- Zhou, Q.; Liu, X.; Zhao, J.; Shen, H.; Xiong, X. Fault diagnosis for rotating machinery based on 1D depth convolutional neural network. J. Vib. Shock. 2018, 37, 31–37. [Google Scholar]
- Shenfield, A.; Howarth, M. A Novel Deep Learning Model for the Detection and Identification of Rolling Element-Bearing Faults. Sensors 2020, 20, 5112. [Google Scholar] [CrossRef]
- Tamilselvan, P.; Wang, P. Failure diagnosis using deep belief learning based health state classification. Reliab. Eng. Syst. Saf. 2013, 115, 124–135. [Google Scholar] [CrossRef]
- Jiang, L.-L.; Yin, H.-K.; Li, X.-J.; Tang, S.-W. Fault Diagnosis of Rotating Machinery Based on Multisensor Information Fusion Using SVM and Time-Domain Features. Shock. Vib. 2014, 2014, 1–8. [Google Scholar] [CrossRef]
- Azamfar, M.; Singh, J.; Bravo-Imaz, I.; Lee, J. Multisensor data fusion for gearbox fault diagnosis using 2-D convolutional neural network and motor current signature analysis. Mech. Syst. Signal Process. 2020, 144, 106861. [Google Scholar] [CrossRef]
- Luwei, K.C.; Yunusa-Kaltungo, A.; Shaaban, Y.A. Integrated Fault Detection Framework for Classifying Rotating Machine Faults Using Frequency Domain Data Fusion and Artificial Neural Networks. Machines 2018, 6, 59. [Google Scholar] [CrossRef]
- Yunusa-Kaltungo, A.; Cao, R. Towards Developing an Automated Faults Characterisation Framework for Rotating Machines. Part 1: Rotor-Related Faults. Energies 2020, 13, 1394. [Google Scholar] [CrossRef]
- Liu, Q.C.; Wang, H.-P.B. A case study on multisensor data fusion for imbalance diagnosis of rotating machinery. Artif. Intell. Eng. Des. Anal. Manuf. 2001, 15, 203–210. [Google Scholar] [CrossRef]
- Wang, Z.; Xiao, F. An Improved Multisensor Data Fusion Method and Its Application in Fault Diagnosis. IEEE Access 2018, 7, 3928–3937. [Google Scholar] [CrossRef]
- Kolanowski, K.; Świetlicka, A.; Kapela, R.; Pochmara, J.; Rybarczyk, A. Multisensor data fusion using Elman neural networks. Appl. Math. Comput. 2018, 319, 236–244. [Google Scholar] [CrossRef]
- Wan, Q.; Xiong, B.; Li, X.; Sun, W. Fault diagnosis for rolling bearing of swashplate based on DCAE-CNN. J. Vib. Shock. 2020, 39, 273–279. [Google Scholar]
- Kim, K.; Jeong, J. Deep Learning-based Data Augmentation for Hydraulic Condition Monitoring System. Procedia Comput. Sci. 2020, 175, 20–27. [Google Scholar] [CrossRef]
- Zhang, H.; Yuan, Q.; Zhao, B.; Niu, G. Bearing fault diagnosis with multi-channel sample and deep convolutional neural network. J. Xi’an Jiaotong Univ. 2020, 54, 58–66. [Google Scholar]
- Quinde, I.B.R.; Sumba, J.P.C.; Ochoa, L.E.E.; Guevara, A.J.V.; Morales-Menendez, R. Bearing Fault Diagnosis Based on Optimal Time-Frequency Representation Method. IFAC Pap. 2019, 52, 194–199. [Google Scholar] [CrossRef]
- Zhao, B.; Zhang, X.; Li, H.; Yang, Z. Intelligent fault diagnosis of rolling bearings based on normalized CNN considering data imbalance and variable working conditions. Knowl. Based Syst. 2020, 199, 105971. [Google Scholar] [CrossRef]
- Che, C.; Wang, H.; Ni, X.; Lin, R. Fault diagnosis of rolling bearing based on deep residual shrinkage network. J. Beijing Univ. Aeronaut. Astronaut. 2020, 1–10. [Google Scholar] [CrossRef]
- Wei, X.; Chao, Q.; Tao, J.; Liu, C.; Wang, L. Cavitation fault diagnosis method for high-speed plunger pump based on LSTM and CNN. Acta Aeronaut. Astronaut. Sin. 2020, 41, 1–12. [Google Scholar]
- Kumar, A.; Gandhi, C.; Zhou, Y.; Kumar, R.; Xiang, J. Improved deep convolution neural network (CNN) for the identification of defects in the centrifugal pump using acoustic images. Appl. Acoust. 2020, 167, 107399. [Google Scholar] [CrossRef]
- AlTobi, M.A.S.; Bevan, G.; Wallace, P.; Harrison, D.; Ramachandran, K. Fault diagnosis of a centrifugal pump using MLP-GABP and SVM with CWT. Eng. Sci. Technol. Int. J. 2019, 22, 854–861. [Google Scholar] [CrossRef]
- Siano, D.; Panza, M. Diagnostic method by using vibration analysis for pump fault detection. Energy Procedia 2018, 148, 10–17. [Google Scholar] [CrossRef]
- Du, Z.; Zhao, J.; Li, H.; Zhang, X. A fault diagnosis method of a plunger pump based on SA-EMD-PNN. J. Vib. Shock. 2019, 38, 145–152. [Google Scholar]
- Wang, S.; Xiang, J.; Tang, H.; Liu, X.; Zhong, Y. Minimum entropy deconvolution based on simulation-determined band pass filter to detect faults in axial piston pump bearings. ISA Trans. 2019, 88, 186–198. [Google Scholar] [CrossRef]
- Yan, L.; Huang, Z. A new hybrid model of sparsity empirical wavelet transform and adaptive dynamic least squares support vector machine for fault diagnosis of gear pump. Adv. Mech. Eng. 2020, 12, 1–8. [Google Scholar]
- Ye, S.; Zhang, J.; Xu, B.; Hou, L.; Xiang, J.; Tang, H. A theoretical dynamic model to study the vibration response characteristics of an axial piston pump. Mech. Syst. Signal Process. 2020, 150, 107237. [Google Scholar] [CrossRef]
- Li, H.; Zhang, Q.; Qin, X.; Sun, Y. Fault diagnosis method for rolling bearings based on short-time Fourier transform and convolution neural network. J. Vib. Shock. 2018, 37, 124–131. [Google Scholar]
- Qiu, N.; Zhou, W.; Che, B.; Wu, D.; Wang, L.; Zhu, H. Effects of micro vortex generators on cavitation erosion by changing periodic shedding into new structures. Phys. Fluids 2020, 32, 104108. [Google Scholar] [CrossRef]
- Tang, S.N.; Zhu, Y.; Li, W.; Cai, J.X. Status and prospect of research in preprocessing methods for measured signals in mechanical systems. J. Drain. Irrig. Mach. Eng. 2019, 37, 822–828. [Google Scholar]
- Zhao, X.; Ye, B.; Chen, T. Study on Measure Rule of Time-Frequency Concentration of Short Time Fourier Transform. J. Vib. Meas. Diagn. 2017, 37, 948–956. [Google Scholar]
- Yin, A.; Li, H.; Li, J.; Dai, Z. Complex Wavelet Structural Similarity Evaluation of Wigner-Ville Distribution and Bearing Early Condition Assessment. J. Vib. 2020, 40, 7–11. [Google Scholar]
- Yan, R.; Lin, C.; Gao, S.; Luo, J.; Li, T.; Xia, Z. Fault diagnosis and analysis of circuit breaker based on wavelet time-frequency representations and convolution neural network. J. Vib. Shock. 2020, 39, 198–205. [Google Scholar]
- Wang, J.; He, Q.; Kong, F. Multiscale envelope manifold for enhanced fault diagnosis of rotating machines. Mech. Syst. Signal Process. 2015, 376–392. [Google Scholar] [CrossRef]
- Silva, A.; Zarzo, A.; González, J.M.M.; Munoz-Guijosa, J.M. Early fault detection of single-point rub in gas turbines with accelerometers on the casing based on continuous wavelet transform. J. Sound Vib. 2020, 487, 115628. [Google Scholar] [CrossRef]
- Tang, S.; Yuan, S.; Zhu, Y.; Li, G. An Integrated Deep Learning Method towards Fault Diagnosis of Hydraulic Axial Piston Pump. Sensors 2020, 20, 6576. [Google Scholar] [CrossRef]
- Jaafra, Y.; Laurent, J.L.; Deruyver, A.; Naceur, M.S. Reinforcement learning for neural architecture search: A review. Image Vis. Comput. 2019, 89, 57–66. [Google Scholar] [CrossRef]
- Unnikrishnan, A.; Sowmya, V.; Soman, K.P. Deep AlexNet with reduced number of trainable parameters for satellite image classification. Procedia Comput. 2018, 143, 931–938. [Google Scholar] [CrossRef]
- Piekarski, M.; Jaworek-Korjakowska, J.; Wawrzyniak, A.I.; Gorgon, M. Convolutional neural network architecture for beam instabilities identification in Synchrotron Radiation Systems as an anomaly detection problem. Measurement 2020, 165, 108116. [Google Scholar] [CrossRef]
- Jiao, J.; Zhao, M.; Lin, J.; Liang, K. A comprehensive review on convolutional neural network in machine fault diagnosis. Neurocomputing 2020, 417, 36–63. [Google Scholar] [CrossRef]
- Sainath, T.N.; Kingsbury, B.E.; Saon, G.; Soltau, H.; Mohamed, A.-R.; Dahl, G.; Ramabhadran, B. Deep Convolutional Neural Networks for Large-scale Speech Tasks. Neural Netw. 2015, 64, 39–48. [Google Scholar] [CrossRef]
- Dai, X.; Duan, Y.; Hu, J.; Liu, S.; Hu, C.; He, Y.; Chen, D.; Luo, C.; Meng, J. Near infrared nighttime road pedestrians recognition based on convolutional neural network. Infrared Phys. Technol. 2019, 97, 25–32. [Google Scholar] [CrossRef]
- Huang, N.; He, J.; Zhu, N.; Xuan, X.; Liu, G.; Chang, C. Identification of the source camera of images based on convolutional neural network. Digit. Investig. 2018, 26, 72–80. [Google Scholar] [CrossRef]
- Zhao, X.; Zhang, Q. Improved AlexNet based fault diagnosis method for rolling bearing under variable conditions. J. Vib. 2020, 40, 472–480. [Google Scholar]
- Wan, L.; Chen, Y.; Li, H.; Li, C. Rolling-Element Bearing Fault Diagnosis Using Improved LeNet-5 Network. Sensors 2020, 20, 1693. [Google Scholar] [CrossRef] [PubMed]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample Type | Total | Training Sample | Test Sample | Labels |
|---|---|---|---|---|
| Sliding slipper wear | 1200 | 840 | 360 | 0 |
| Loose slipper | 1200 | 840 | 360 | 1 |
| Swashplate wear | 1200 | 840 | 360 | 2 |
| Normal state | 1200 | 840 | 360 | 3 |
| Center spring failure | 1200 | 840 | 360 | 4 |
| Total | 6000 | 4200 | 1800 | — |
| Layers | Convolution Kernels × Convolution Kernel Size | Output | Activation Function |
|---|---|---|---|
| First convolution layer | 35 × 11 × 11 | 35 × 55 × 55 | RELU |
| First max-pooling layer | 35 × 3 × 3 | 35 × 27 × 27 | — |
| Second convolution layer | 35 × 3 × 3 | 35 × 27 × 27 | RELU |
| Second max-pooling layer | 35 × 5 × 5 | 35 × 13 × 13 | — |
| Third convolution layer | 35 × 3 × 3 | 35 × 13 × 13 | RELU |
| Third max-pooling layer | 35 × 3 × 3 | 35 × 6 × 6 | — |
| First full connection layer | — | 1024 | RELU |
| Second full connection layer | — | 512 | RELU |
| Third full connection layer | — | 5 | — |
| Sample Type | Recognition Accuracy |
|---|---|
| Normal state | 100.00% |
| Loose slipper | 97.22% |
| Sliding slipper wear | 100.00% |
| Swash plate fault | 100.00% |
| Center spring failure | 94.72% |
| Model | Average Accuracy | Std | Training Time (s/epoch) | Test Time (s/epoch) |
|---|---|---|---|---|
| CWT-AlexNet | 98.06% | 0.171 | 7.27 | 3.12 |
| Tradition LeNet-5 | 93.79% | 0.348 | 5.33 | 1.41 |
| Improved 2D LeNet-5 | 95.63% | 0.739 | 10.29 | 1.53 |
| Tradition AlexNet | 98.02% | 0.134 | 11.54 | 4.25 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Y.; Li, G.; Wang, R.; Tang, S.; Su, H.; Cao, K. Intelligent Fault Diagnosis of Hydraulic Piston Pump Based on Wavelet Analysis and Improved AlexNet. Sensors 2021, 21, 549. https://doi.org/10.3390/s21020549
Zhu Y, Li G, Wang R, Tang S, Su H, Cao K. Intelligent Fault Diagnosis of Hydraulic Piston Pump Based on Wavelet Analysis and Improved AlexNet. Sensors. 2021; 21(2):549. https://doi.org/10.3390/s21020549
Chicago/Turabian StyleZhu, Yong, Guangpeng Li, Rui Wang, Shengnan Tang, Hong Su, and Kai Cao. 2021. "Intelligent Fault Diagnosis of Hydraulic Piston Pump Based on Wavelet Analysis and Improved AlexNet" Sensors 21, no. 2: 549. https://doi.org/10.3390/s21020549
APA StyleZhu, Y., Li, G., Wang, R., Tang, S., Su, H., & Cao, K. (2021). Intelligent Fault Diagnosis of Hydraulic Piston Pump Based on Wavelet Analysis and Improved AlexNet. Sensors, 21(2), 549. https://doi.org/10.3390/s21020549