
Analysis of Tilt Effect on Notch Depth Profiling Using Thin-Skin Regime of Driver-Pickup Eddy-Current Sensor




Abstract
:1. Introduction
2. Thin-Skin Regime Using Eddy-Current T-R Sensor
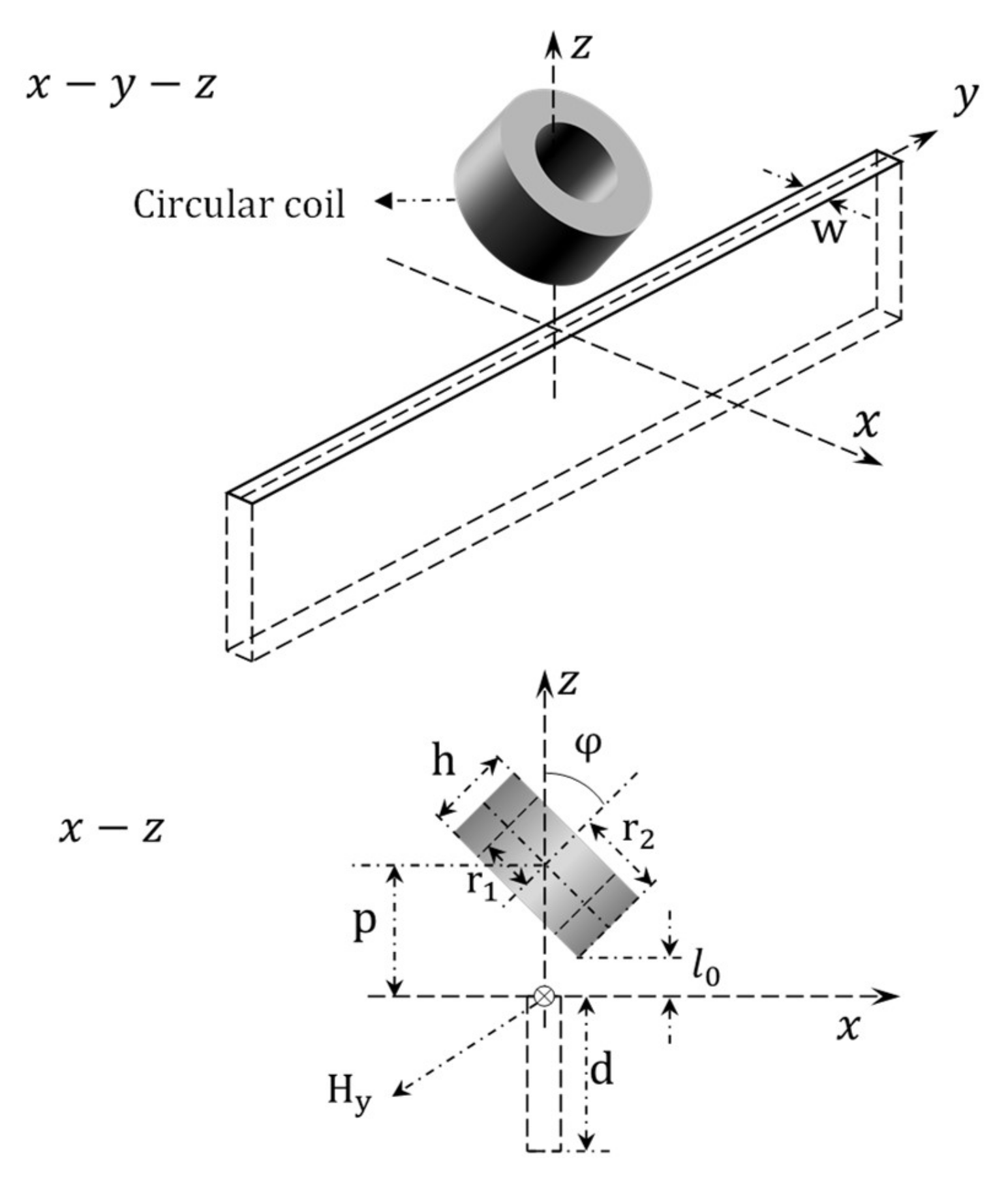
2.1. Original Method-General Formulas of Thin-Skin Regime for Self-Impedance of Tilted Coil Winding above Long Surface Crack
2.2. Method-Revised Algorithms of Mutual Impedance of Tilted T-R Sensor Scanning Cross Long Notches
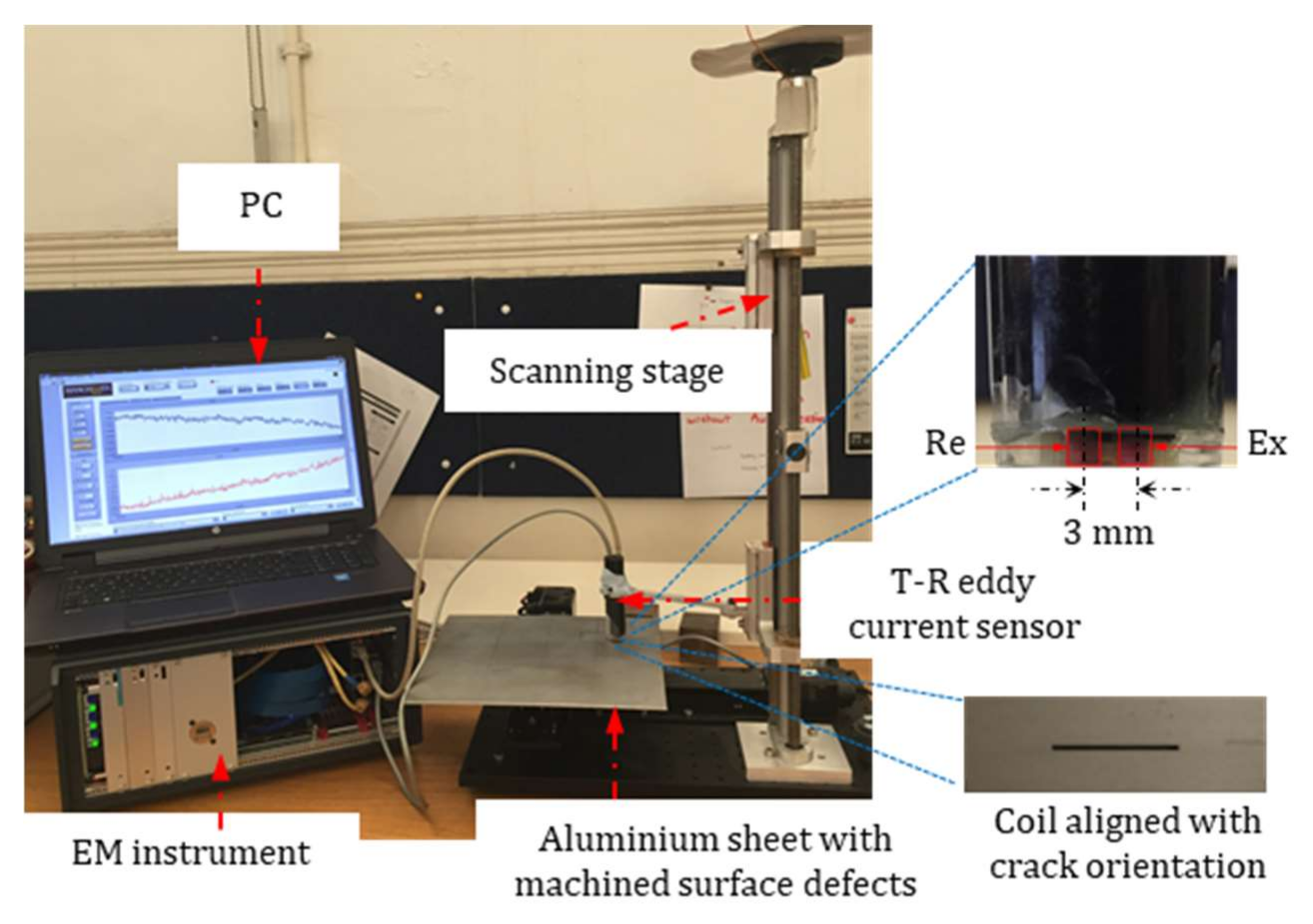
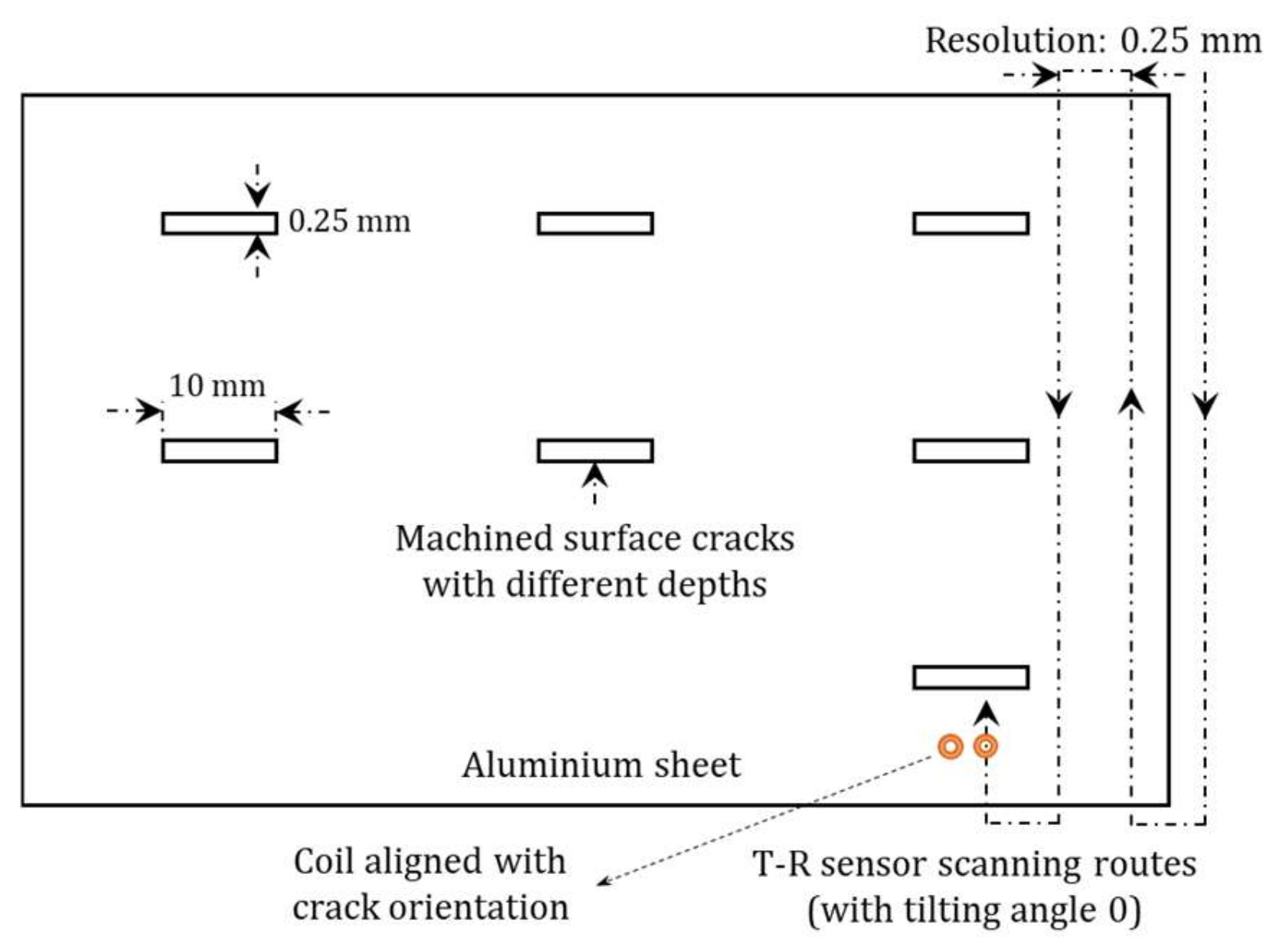
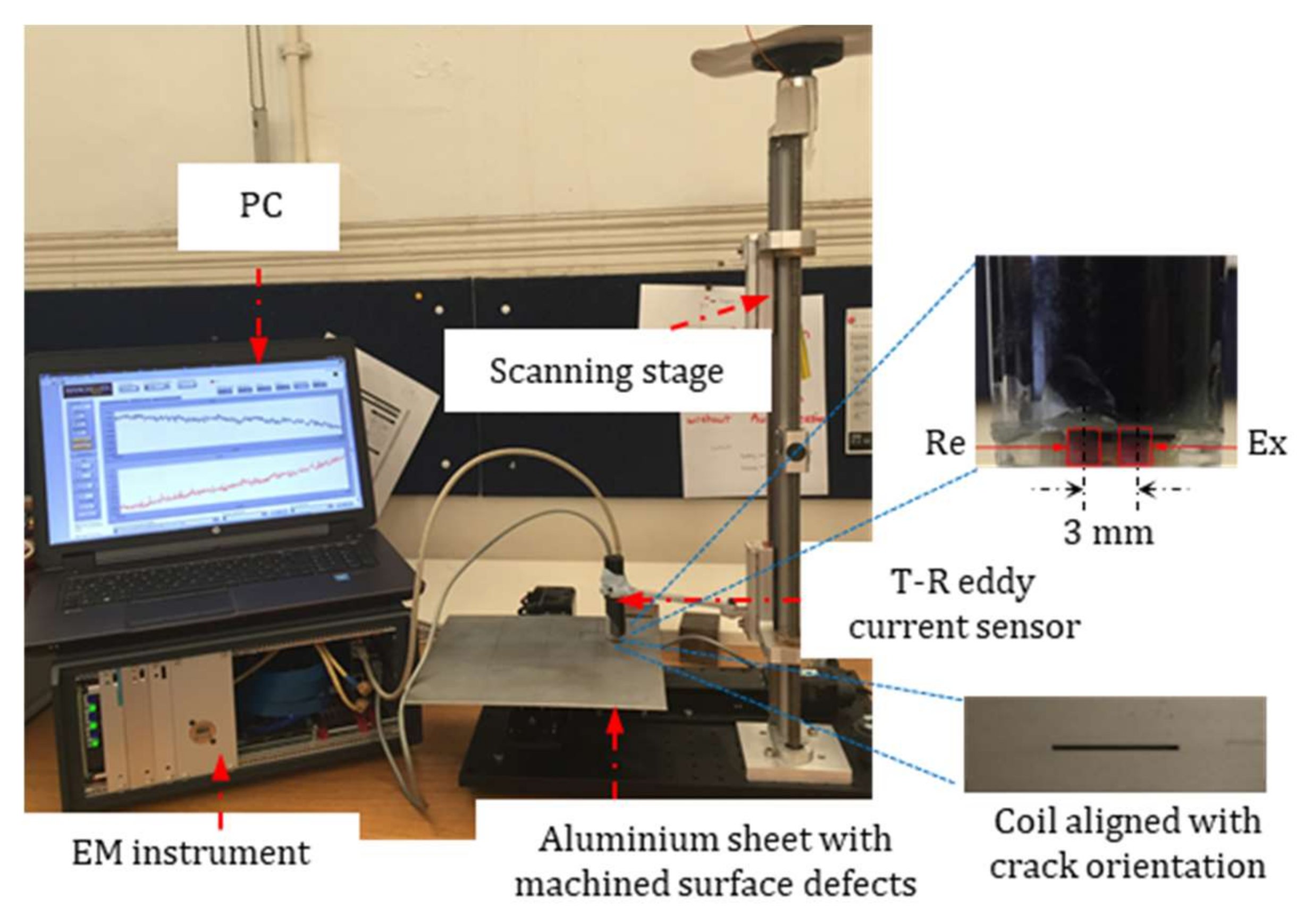
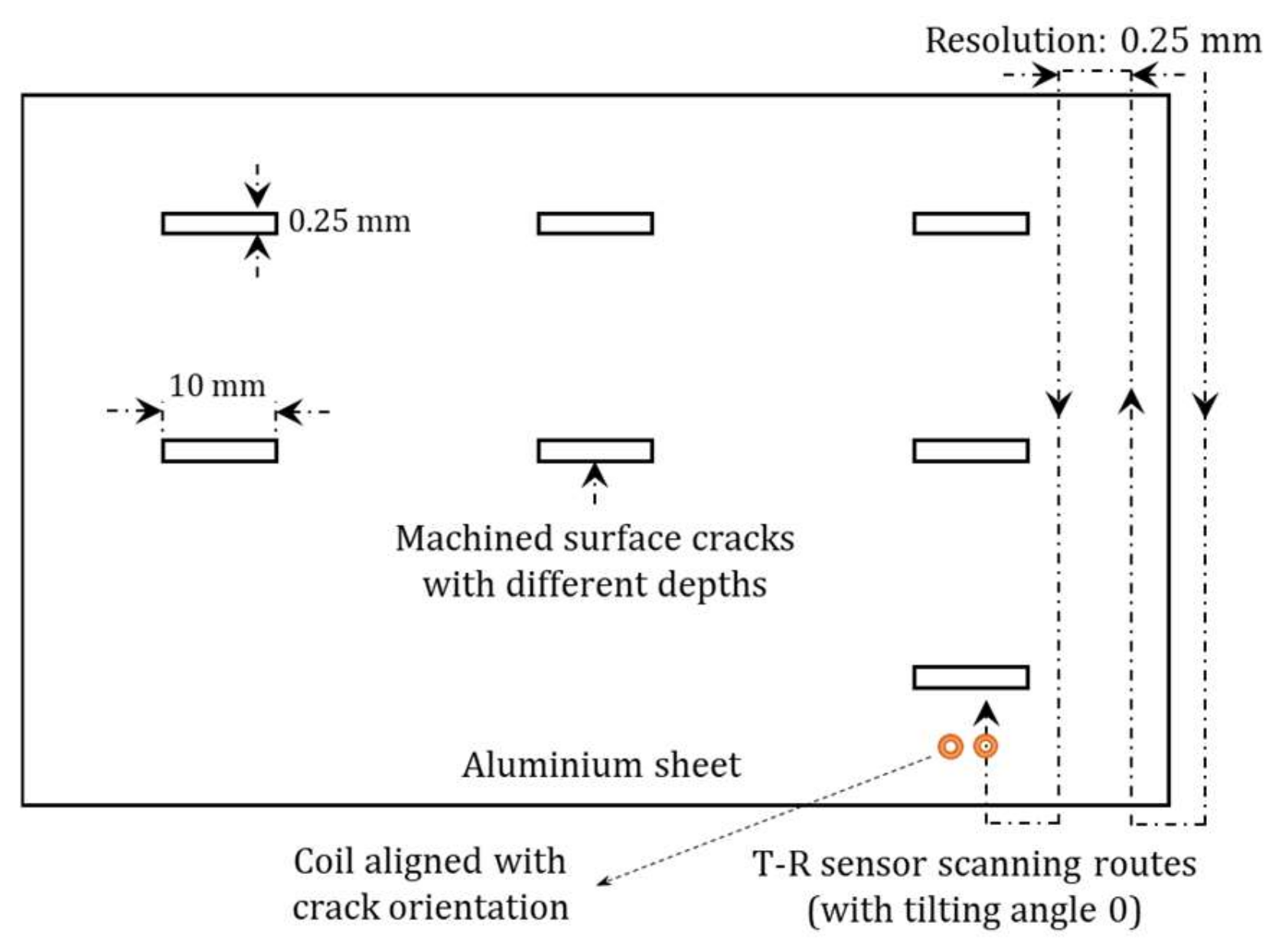
3. Experiments
4. Result and Discussion
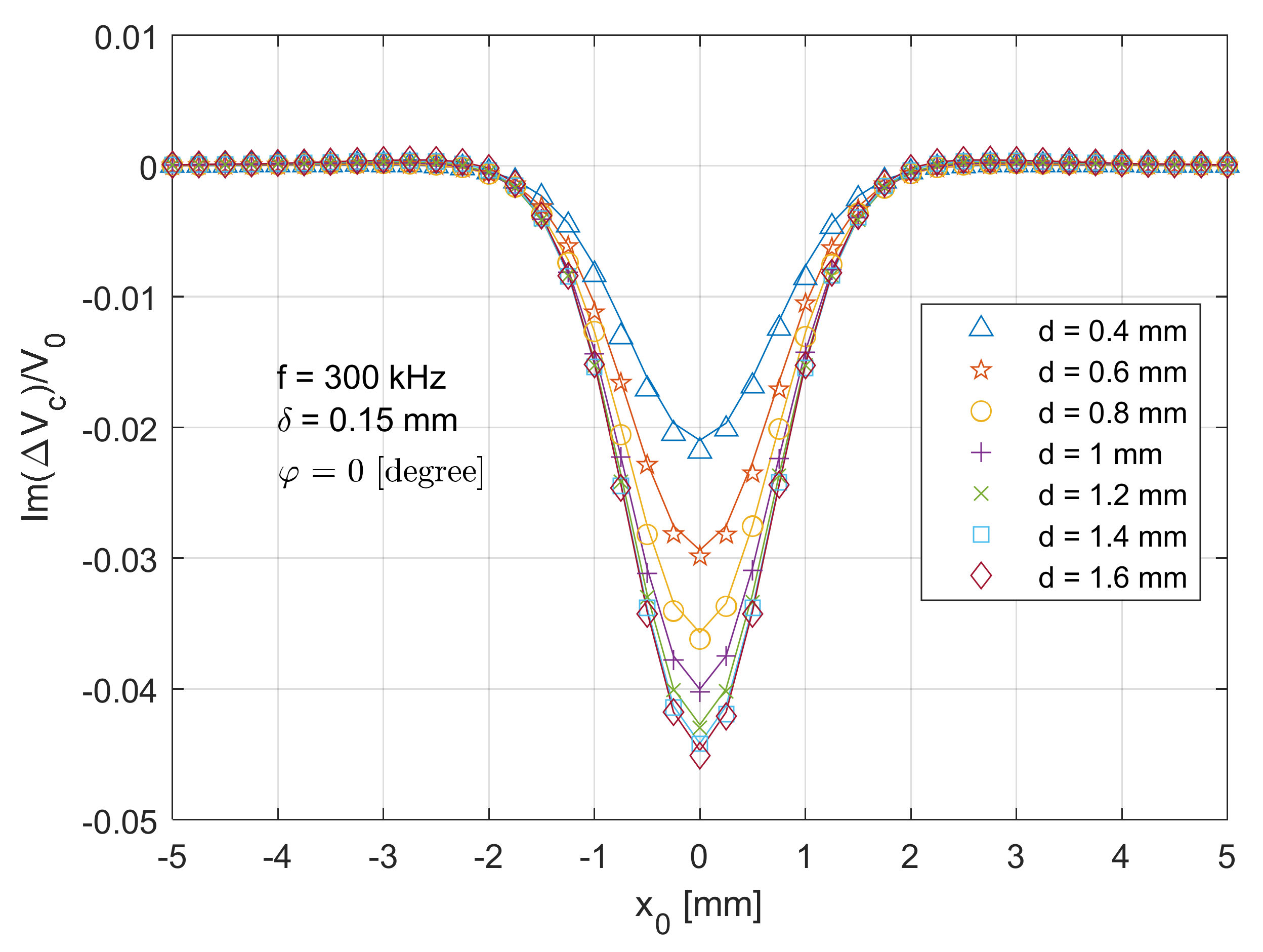
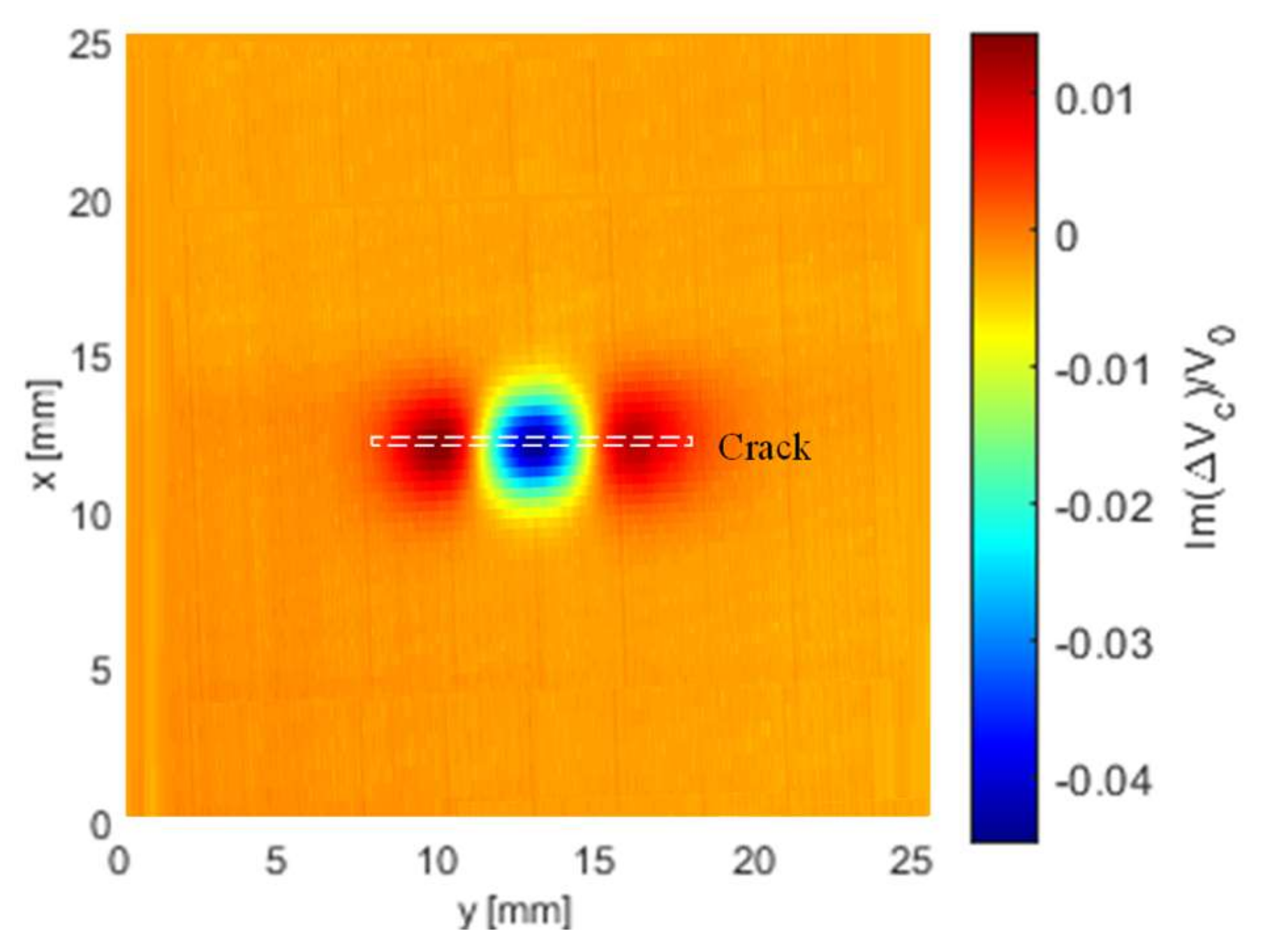
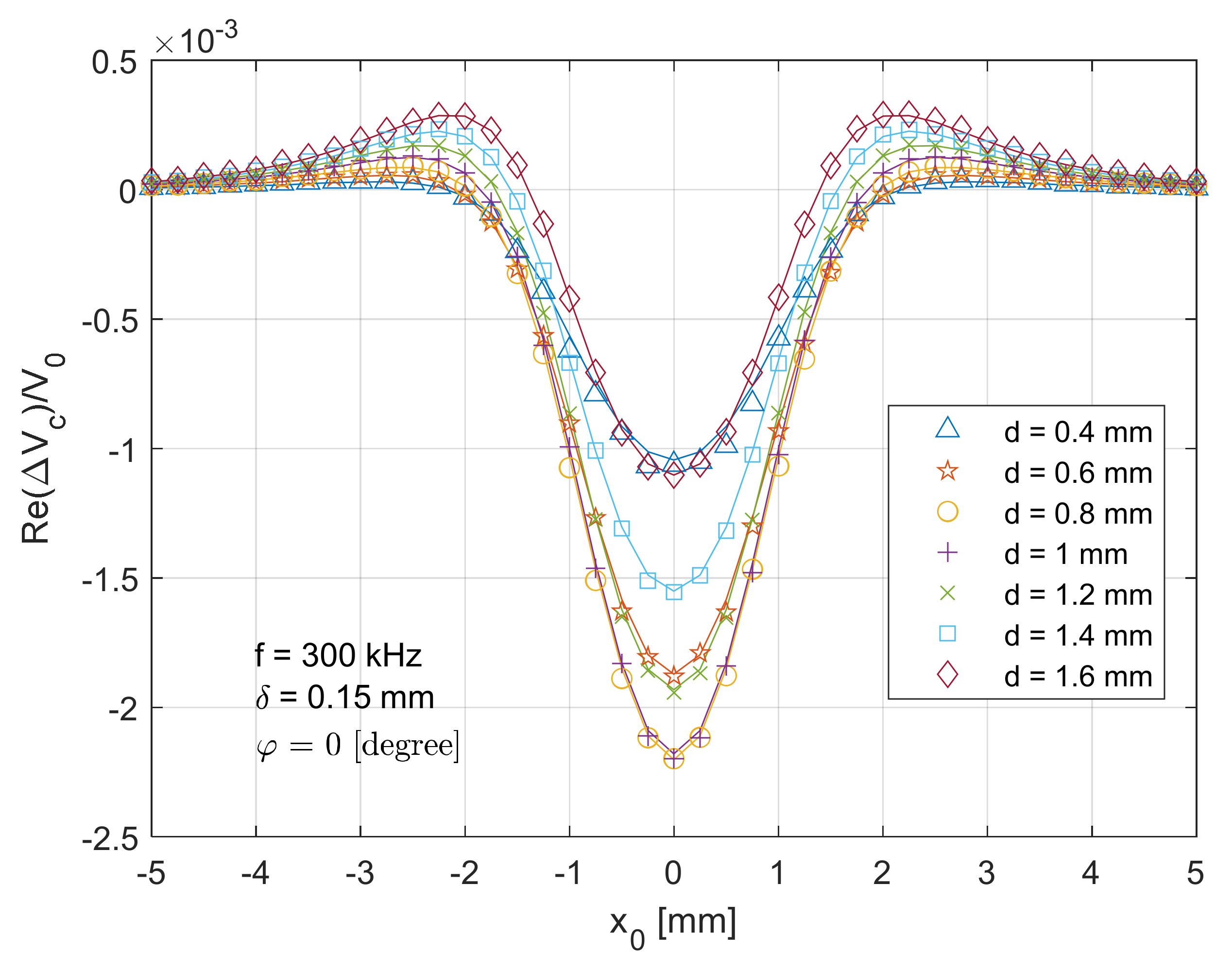
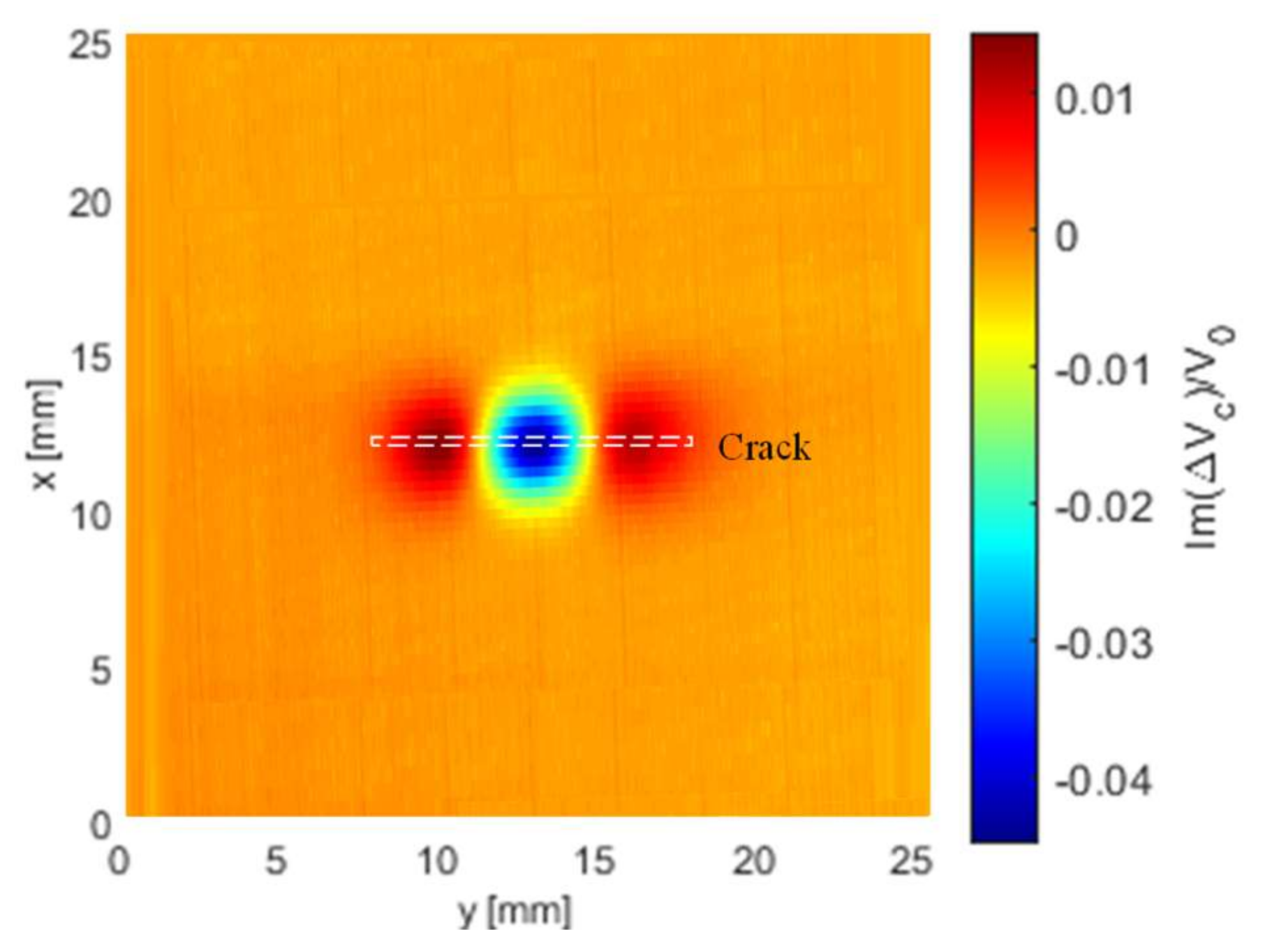
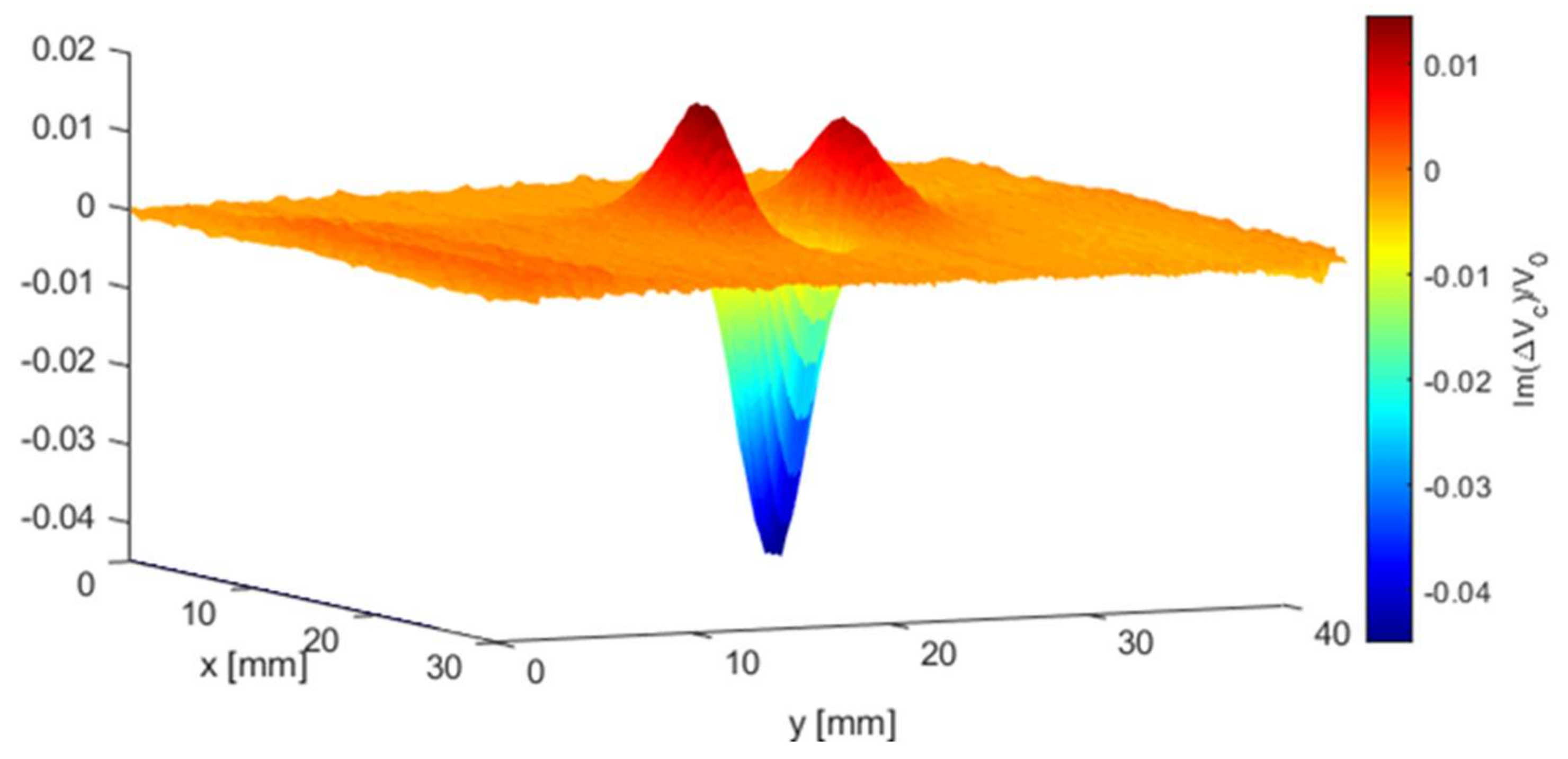
4.1. Scanned Voltage for T-R Sensor across Notch without Tilt Effect
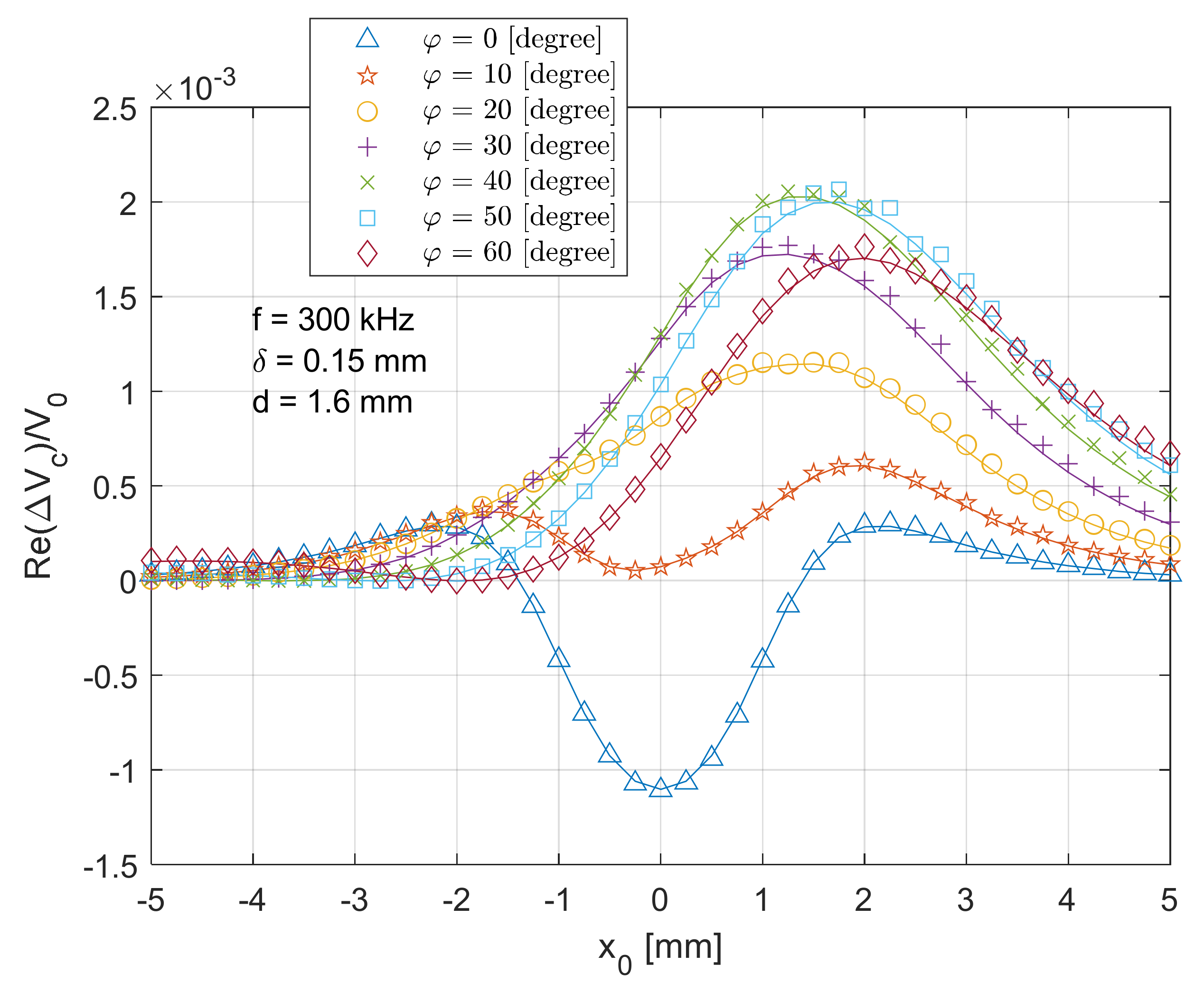
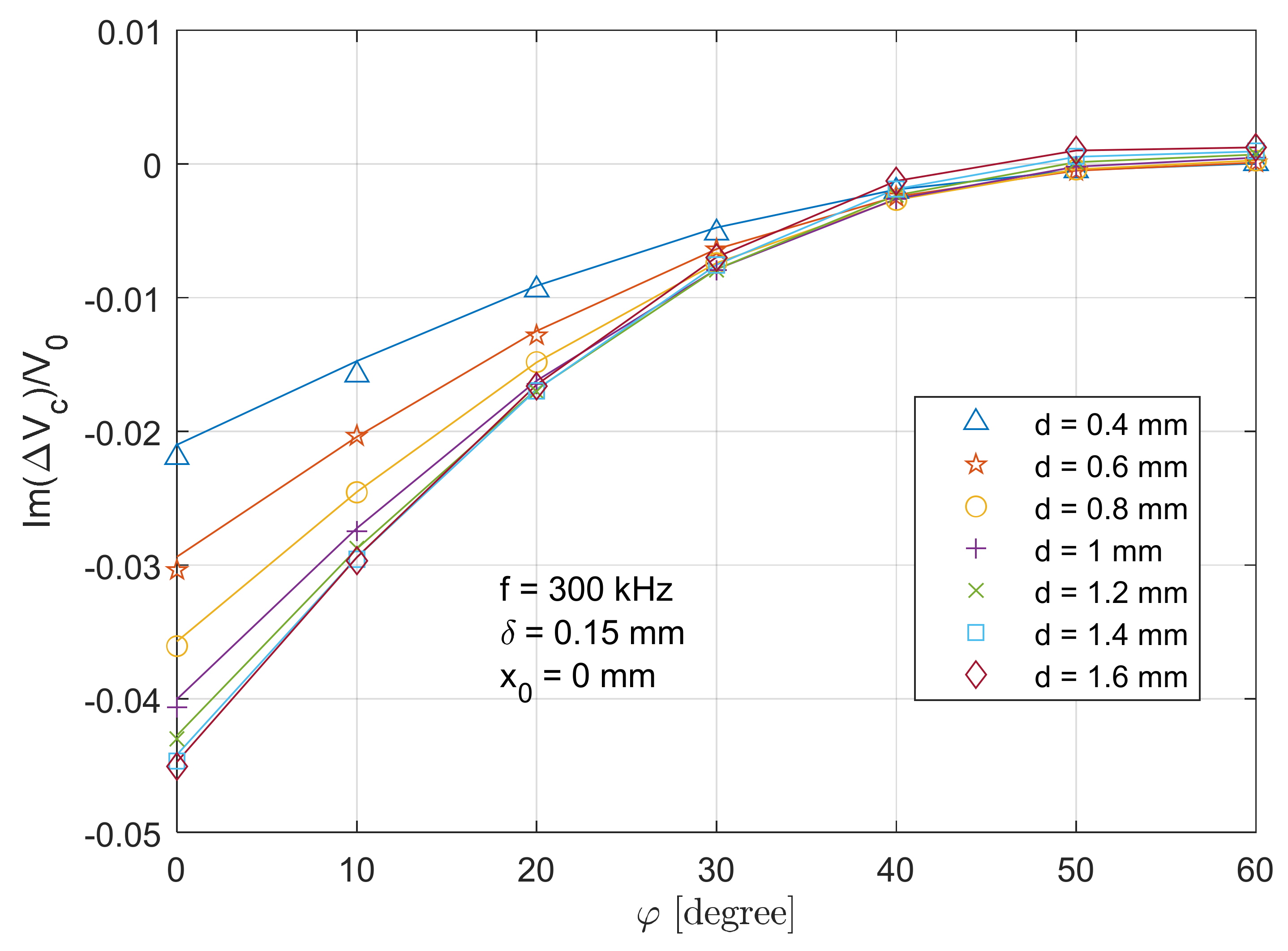
4.2. Tilted T-R Sensor Across the Crack
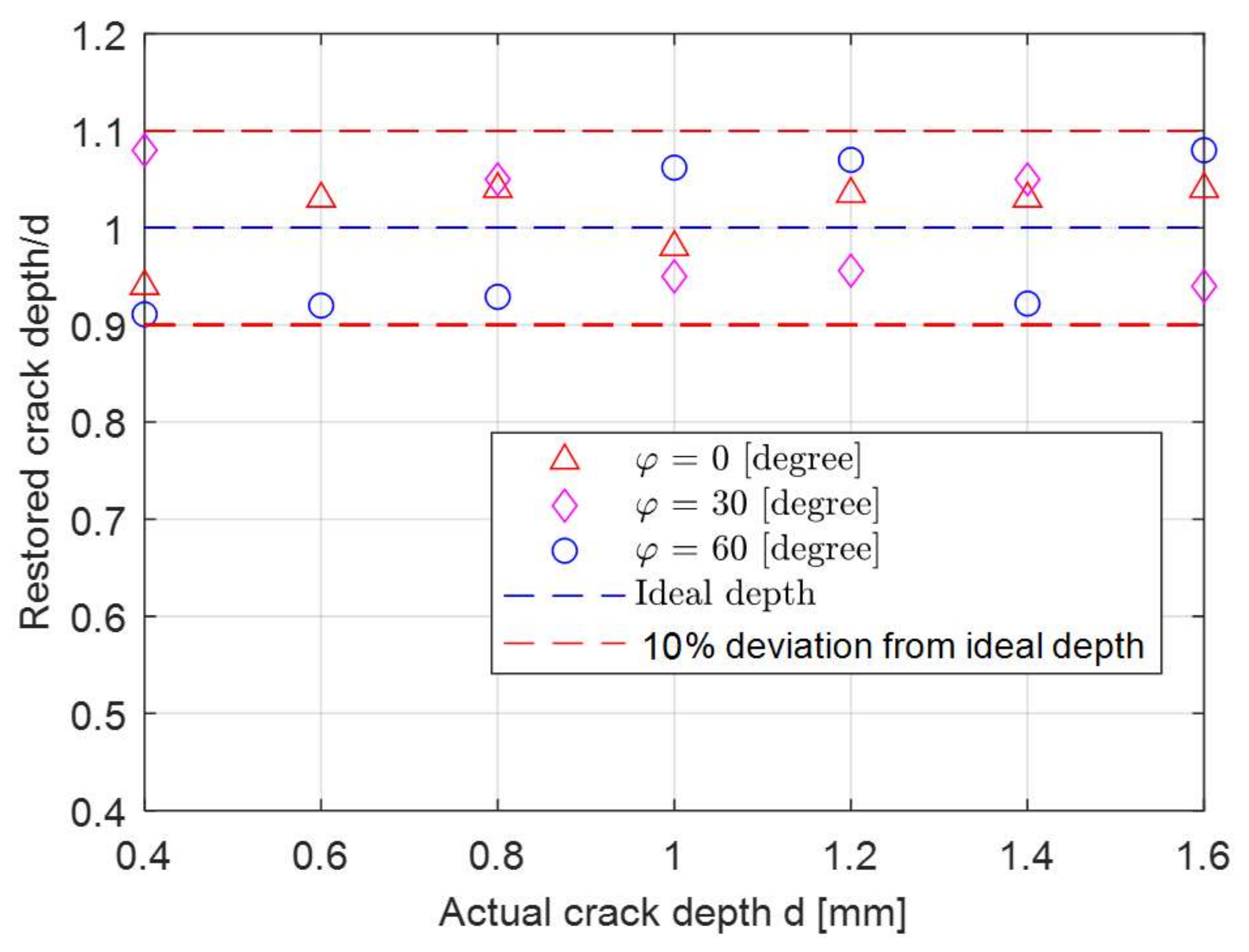
4.3. Retrieval of Surface Crack Depth
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Yang, G.; Dib, G.; Udpa, L.; Tamburrino, A.; Udpa, S.S. Rotating field EC-GMR sensor for crack detection at fastener site in layered structures. IEEE Sens. J. 2014, 15, 463–470. [Google Scholar] [CrossRef]
- Vasic, D.; Bilas, V.; Ambrus, D. Pulsed eddy-current nondestructive testing of ferromagnetic tubes. IEEE Trans. Instrum. Meas. 2004, 53, 1289–1294. [Google Scholar] [CrossRef]
- Li, W.; Chen, G.; Ge, J.; Yin, X.; Li, K. High sensitivity rotating alternating current field measurement for arbitrary-angle underwater cracks. NDT E Int. 2016, 79, 123–131. [Google Scholar] [CrossRef]
- Egorov, A.V.; Polyakov, V.V.; Salita, D.S.; Kolubaev, E.A.; Psakhie, S.G.; Chernyavskii, A.G.; Vorobei, I.V. Inspection of aluminum alloys by a multi-frequency eddy current method. Def. Technol. 2015, 11, 99–103. [Google Scholar] [CrossRef] [Green Version]
- Lu, M.; Peyton, A.; Yin, W. Acceleration of frequency sweeping in eddy-current computation. IEEE Trans. Magn. 2017, 53, 7402808. [Google Scholar] [CrossRef] [Green Version]
- Bowler, J.R.; Norton, S.J.; Harrison, D.J. Eddy-current interaction with an ideal crack. II. The inverse problem. J. Appl. Phys. 1994, 75, 8138–8144. [Google Scholar] [CrossRef]
- Lu, M.; Xu, H.; Zhu, W.; Yin, L.; Zhao, Q.; Peyton, A.; Yin, W. Conductivity Lift-off Invariance and measurement of permeability for ferrite metallic plates. NDT E Int. 2018, 95, 36–44. [Google Scholar] [CrossRef]
- Lu, M.; Meng, X.; Huang, R.; Chen, L.; Peyton, A.; Yin, W. A High-Frequency Phase Feature for the Measurement of Magnetic Permeability Using Eddy Current Sensor. NDT E Int. 2021, 123, 102519. [Google Scholar] [CrossRef]
- Avila, J.R.S.; Lu, M.; Huang, R.; Chen, Z.; Zhu, S.; Yin, W. Accurate measurements of plate thickness with variable lift-off using a combined inductive and capacitive sensor. NDT E Int. 2020, 110, 102202. [Google Scholar] [CrossRef]
- Lu, M.; Meng, X.; Yin, W.; Qu, Z.; Wu, F.; Tang, J.; Xu, H.; Huang, R.; Chen, Z.; Zhao, Q.; et al. Thickness measurement of non-magnetic steel plates using a novel planar triple-coil sensor. NDT E Int. 2019, 107, 102148. [Google Scholar] [CrossRef]
- Huang, R.; Lu, M.; Peyton, A.; Yin, W. Thickness measurement of metallic plates with finite planar dimension using eddy current method. IEEE Trans. Instrum. Meas. 2020, 69, 8424–8431. [Google Scholar]
- Lu, M.; Meng, X.; Chen, L.; Huang, R.; Yin, W.; Peyton, A. Measurement of ferromagnetic slabs permeability based on a novel planar triple-coil sensor. IEEE Sens. J. 2019, 20, 2904–2910. [Google Scholar] [CrossRef]
- Lu, M.; Zhu, W.; Yin, L.; Peyton, A.; Yin, W.; Qu, Z. Reducing the lift-off effect on permeability measurement for magnetic plates from multifrequency induction data. IEEE Trans. Instrum. Meas. 2017, 67, 167–174. [Google Scholar] [CrossRef] [Green Version]
- Gallion, J.R.; Zoughi, R. Millimeter-wave imaging of surface-breaking cracks in steel with severe surface corrosion. IEEE Trans. Instrum. Meas. 2017, 66, 2789–2791. [Google Scholar] [CrossRef]
- Tian, G.Y.; Sophian, A. Defect classification using a new feature for pulsed eddy current sensors. NDT E Int. 2005, 38, 77–82. [Google Scholar] [CrossRef]
- Luloff, M.S.; Morelli, J.; Krause, T.W. February. Examination of Dodd and Deeds solutions for a transmit-receive eddy current probe above a layered planar structure. AIP Conf. Proc. 2017, 1806, 110004. [Google Scholar]
- Lu, M.; Huang, R.; Yin, W.; Zhao, Q.; Peyton, A. Measurement of permeability for ferrous metallic plates using a novel lift-off compensation technique on phase signature. IEEE Sens. J. 2019, 19, 7440–7446. [Google Scholar] [CrossRef] [Green Version]
- Betta, G.; Ferrigno, L.; Laracca, M. GMR-based ECT instrument for detection and characterization of crack on a planar specimen: A hand-held solution. IEEE Trans. Instrum. Meas. 2011, 61, 505–512. [Google Scholar] [CrossRef]
- Huang, R.; Lu, M.; Peyton, A.; Yin, W. A novel perturbed matrix inversion based method for the acceleration of finite element analysis in crack-scanning eddy current NDT. IEEE Access 2020, 8, 12438–12444. [Google Scholar] [CrossRef]
- Cannon, D.F.; Edel, K.O.; Grassie, S.L.; Sawley, K. Rail defects: An overview. Fatigue Fract. Eng. Mater. Struct. 2003, 26, 865–886. [Google Scholar] [CrossRef]
- Nicholson, G.L.; Davis, C.L. Modelling of the response of an ACFM sensor to rail and rail wheel RCF cracks. NDT E Int. 2012, 46, 107–114. [Google Scholar] [CrossRef]
- Bíró, O. Edge element formulations of eddy current problems. Comput. Methods Appl. Mech. Eng. 1999, 169, 391–405. [Google Scholar] [CrossRef]
- Yin, W.; Lu, M.; Tang, J.; Zhao, Q.; Zhang, Z.; Li, K.; Han, Y.; Peyton, A. Custom edge-element FEM solver and its application to eddy-current simulation of realistic 2M-element human brain phantom. Bioelectromagnetics 2018, 39, 604–616. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yin, W.; Lu, M.; Yin, L.; Zhao, Q.; Meng, X.; Zhang, Z.; Peyton, A. Acceleration of eddy current computation for scanning probes. Insight Non Destr. Test. Cond. Monit. 2018, 60, 547–555. [Google Scholar] [CrossRef]
- Yin, W.; Tang, J.; Lu, M.; Xu, H.; Huang, R.; Zhao, Q.; Zhang, Z.; Peyton, A. An equivalent-effect phenomenon in eddy current non-destructive testing of thin structures. IEEE Access 2019, 7, 70296–70307. [Google Scholar] [CrossRef]
- Zeng, Z.; Udpa, L.; Udpa, S.S.; Chan, M.S.C. Reduced magnetic vector potential formulation in the finite element analysis of eddy current nondestructive testing. IEEE Trans. Magn. 2009, 45, 964–967. [Google Scholar] [CrossRef]
- Papaelias, M.P.; Lugg, M.C.; Roberts, C.; Davis, C.L. High-speed inspection of rails using ACFM techniques. NDT E Int. 2009, 42, 328–335. [Google Scholar] [CrossRef]
- Theodoulidis, T.; Poulakis, N.; Dragogias, A. Rapid computation of eddy current signals from narrow cracks. NDT E Int. 2010, 43, 13–19. [Google Scholar] [CrossRef]
- Theodoulidis, T. Analytical model for tilted coils in eddy-current nondestructive inspection. IEEE Trans. Magn. 2005, 41, 2447–2454. [Google Scholar] [CrossRef]
- Burke, S.K. Eddy-current inversion in the thin-skin limit: Determination of depth and opening for a long crack. J. Appl. Phys. 1994, 76, 3072–3080. [Google Scholar] [CrossRef]
- Dodd, C.V.; Deeds, W.E. Analytical solutions to eddy-current probe-coil problems. J. Appl. Phys. 1968, 39, 2829–2838. [Google Scholar] [CrossRef] [Green Version]
- Harfield, N.; Bowler, J.R. Theory of thin-skin eddy-current interaction with surface cracks. J. Appl. Phys. 1997, 82, 4590–4603. [Google Scholar] [CrossRef]
- Avila, J.R.S.; Chen, Z.; Xu, H.; Yin, W. A multi-frequency NDT system for imaging and detection of cracks. In Proceedings of the 2018 IEEE International Symposium on Circuits and Systems (ISCAS) IEEE, Florence, Italy, 27–30 May 2018; pp. 1–4. [Google Scholar]
- Xu, H.; Lu, M.; Avila, J.R.; Zhao, Q.; Zhou, F.; Meng, X.; Yin, W. Imaging a weld cross-section using a novel frequency feature in multi-frequency eddy current testing. Insight Non Destr. Test. Cond. Monit. 2019, 61, 738–743. [Google Scholar] [CrossRef]
- Yin, L.; Ye, B.; Rodriguez, S.; Leiva, R.; Meng, X.; Akid, R.; Yin, W.; Lu, M. Detection of corrosion pits based on an analytically optimised eddy current sensor. Insight Non Destr. Test. Cond. Monit. 2018, 60, 561–567. [Google Scholar] [CrossRef]
- Cheng, J.; Qiu, J.; Ji, H.; Wang, E.; Takagi, T.; Uchimoto, T. Application of low frequency ECT method in noncontact detection and visualization of CFRP material. Compos. Part B Eng. 2017, 110, 141–152. [Google Scholar] [CrossRef]
- Cao, B.H.; Li, C.; Fan, M.B.; Ye, B.; Tian, G.Y. Analytical model of tilted driver–pickup coils for eddy current nondestructive evaluation. Chin. Phys. B 2018, 27, 30301. [Google Scholar] [CrossRef]
- Lu, M.; Xie, Y.; Zhu, W.; Peyton, A.; Yin, W. Determination of the magnetic permeability, electrical conductivity, and thickness of ferrite metallic plates using a multifrequency electromagnetic sensing system. IEEE Trans. Ind. Inform. 2018, 15, 4111–4119. [Google Scholar] [CrossRef] [Green Version]
- Lu, M.; Yin, L.; Peyton, A.; Yin, W. A novel compensation algorithm for thickness measurement immune to lift-off variations using eddy current method. IEEE Trans. Instrum. Meas. 2016, 65, 2773–2779. [Google Scholar]
- Lu, M.; Chen, L.; Meng, X.; Huang, R.; Peyton, A.; Yin, W. Thickness measurement of metallic film based on a high-frequency feature of triple-coil electromagnetic eddy current sensor. IEEE Trans. Instrum. Meas. 2020, 70, 6001208. [Google Scholar]
- Lu, M.; Meng, X.; Huang, R.; Chen, L.; Peyton, A.; Yin, W. Measuring lift-off distance and electromagnetic property of metal using dual-frequency linearity feature. IEEE Trans. Instrum. Meas. 2020, 70, 6001409. [Google Scholar] [CrossRef]
- Lu, M.; Meng, X.; Huang, R.; Chen, L.; Peyton, A.; Yin, W. Liftoff tolerant pancake eddy-current sensor for the thickness and spacing measurement of nonmagnetic plates. IEEE Trans. Instrum. Meas. 2020, 70, 6002209. [Google Scholar]
- Huang, R.; Lu, M.; He, X.; Peyton, A.; Yin, W. Measuring Coaxial Hole Size of Finite-Size Metallic Disk Based on a Dual-Constraint Integration Feature Using Multifrequency Eddy Current Testing. IEEE Trans. Instrum. Meas. 2020, 70, 6001007. [Google Scholar]
- Huang, R.; Lu, M.; Zhang, Z.; Zhao, Q.; Xie, Y.; Tao, Y.; Meng, T.; Peyton, A.; Theodoulidis, T.; Yin, W. Measurement of the radius of metallic plates based on a novel finite region eigenfunction expansion (FREE) method. IEEE Sens. J. 2020, 20, 15099–15106. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Transmitter Coil or Receiver Coil |
|---|---|
| Inner radius (mm) | 0.75 |
| Outer radius (mm) | 1.25 |
| Turns | 300 |
| Spacing (mm) | 3.0 |
| Coil wire diameter (mm) | 0.071 |
| Coil height (mm) | 3.0 |
| Lift-off (mm) | 2.0 |
| Tilt angle (degree) | 0:10:60 |
| Working frequency (kHz) | 300 |
| Magnitude of free-space voltage (152 kHz) (V) | 1.12 |
| Driven current (mA rms) | 48 |
| Free-space coil inductance (H) | |
| Free-space coil DC resistance (Ω) |
| Parameter | Value | |||
|---|---|---|---|---|
| Aluminium sheet | Electrical conductivity (MS/m) | 36.9 | ||
| Relative permeability | 1 | |||
| Thickness (mm) | 2.0 | |||
| Magnitude of voltage change (mV) without surface notches under 300 kHz | 225.7 | |||
| Skin depth (mm) under 300 kHz | 0.15 | |||
| Machined surface crack slot | Width/gape (mm) | 0.25 | ||
| Length (mm) | 10.0 | |||
| Depth (mm) | 0.4:0.2:1.6 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, M.; Meng, X.; Huang, R.; Peyton, A.; Yin, W. Analysis of Tilt Effect on Notch Depth Profiling Using Thin-Skin Regime of Driver-Pickup Eddy-Current Sensor. Sensors 2021, 21, 5536. https://doi.org/10.3390/s21165536
Lu M, Meng X, Huang R, Peyton A, Yin W. Analysis of Tilt Effect on Notch Depth Profiling Using Thin-Skin Regime of Driver-Pickup Eddy-Current Sensor. Sensors. 2021; 21(16):5536. https://doi.org/10.3390/s21165536
Chicago/Turabian StyleLu, Mingyang, Xiaobai Meng, Ruochen Huang, Anthony Peyton, and Wuliang Yin. 2021. "Analysis of Tilt Effect on Notch Depth Profiling Using Thin-Skin Regime of Driver-Pickup Eddy-Current Sensor" Sensors 21, no. 16: 5536. https://doi.org/10.3390/s21165536
APA StyleLu, M., Meng, X., Huang, R., Peyton, A., & Yin, W. (2021). Analysis of Tilt Effect on Notch Depth Profiling Using Thin-Skin Regime of Driver-Pickup Eddy-Current Sensor. Sensors, 21(16), 5536. https://doi.org/10.3390/s21165536