
Effectiveness of Electrostatic Shielding in High-Frequency Electromagnetic Induction Soil Sensing



Abstract
:1. Introduction
2. Materials and Methods
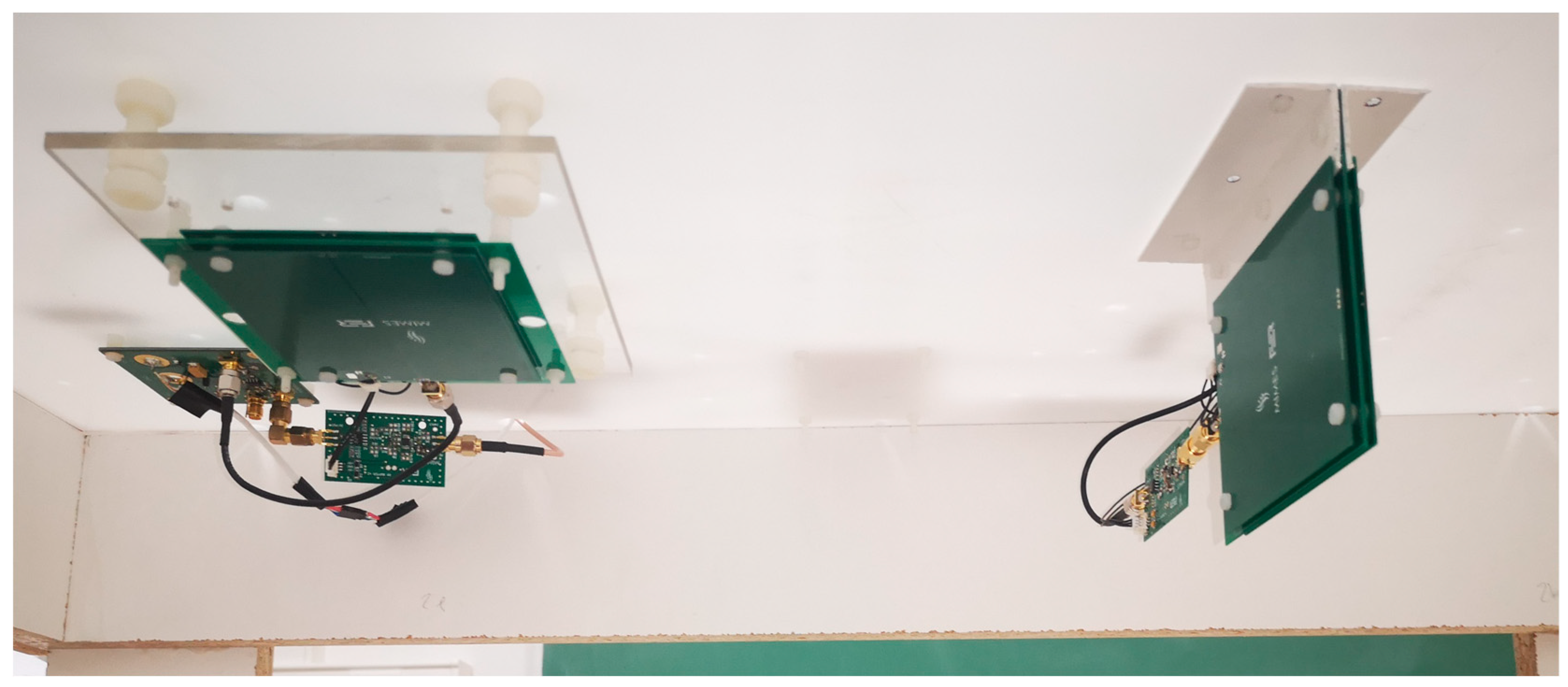
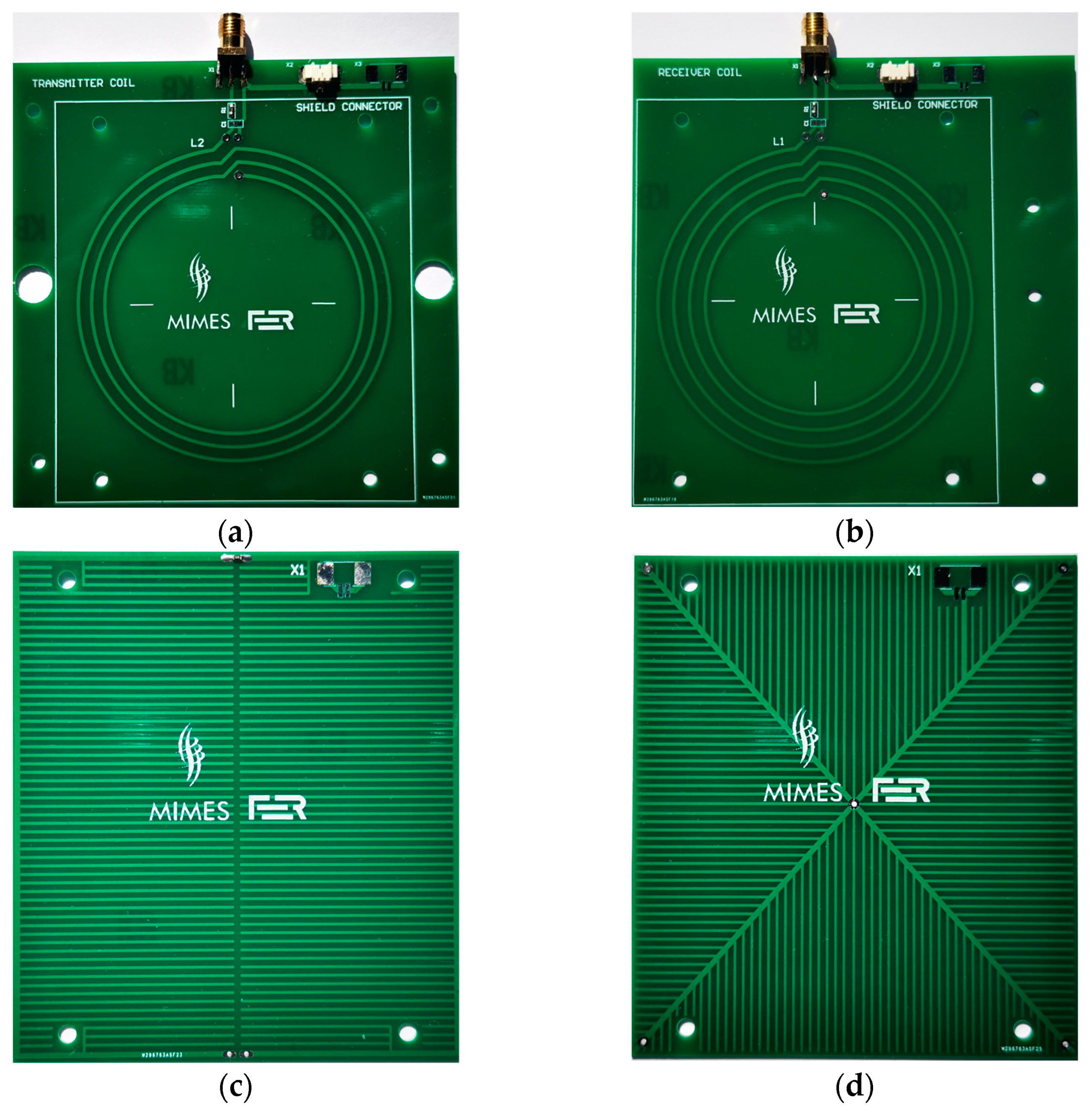
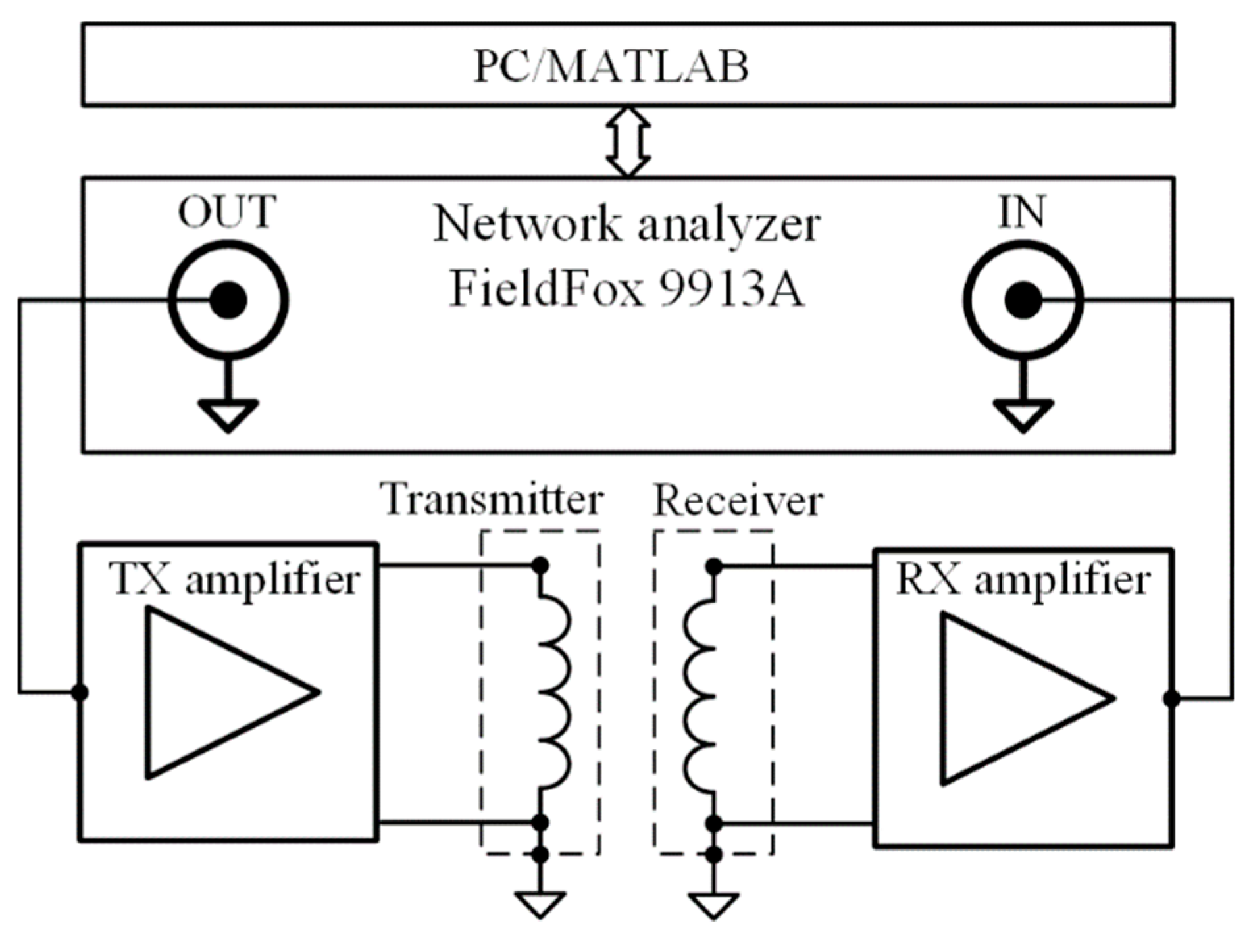
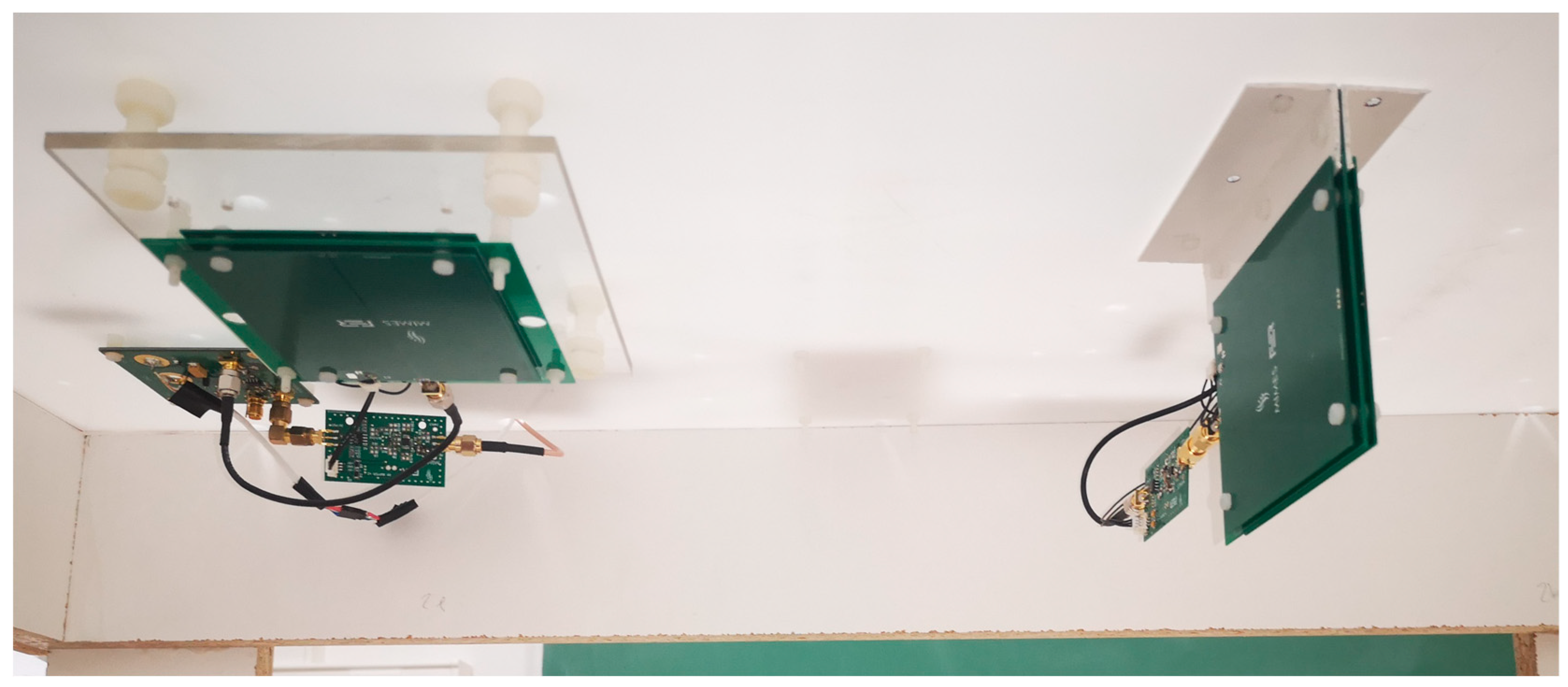
2.1. Experimental Setup
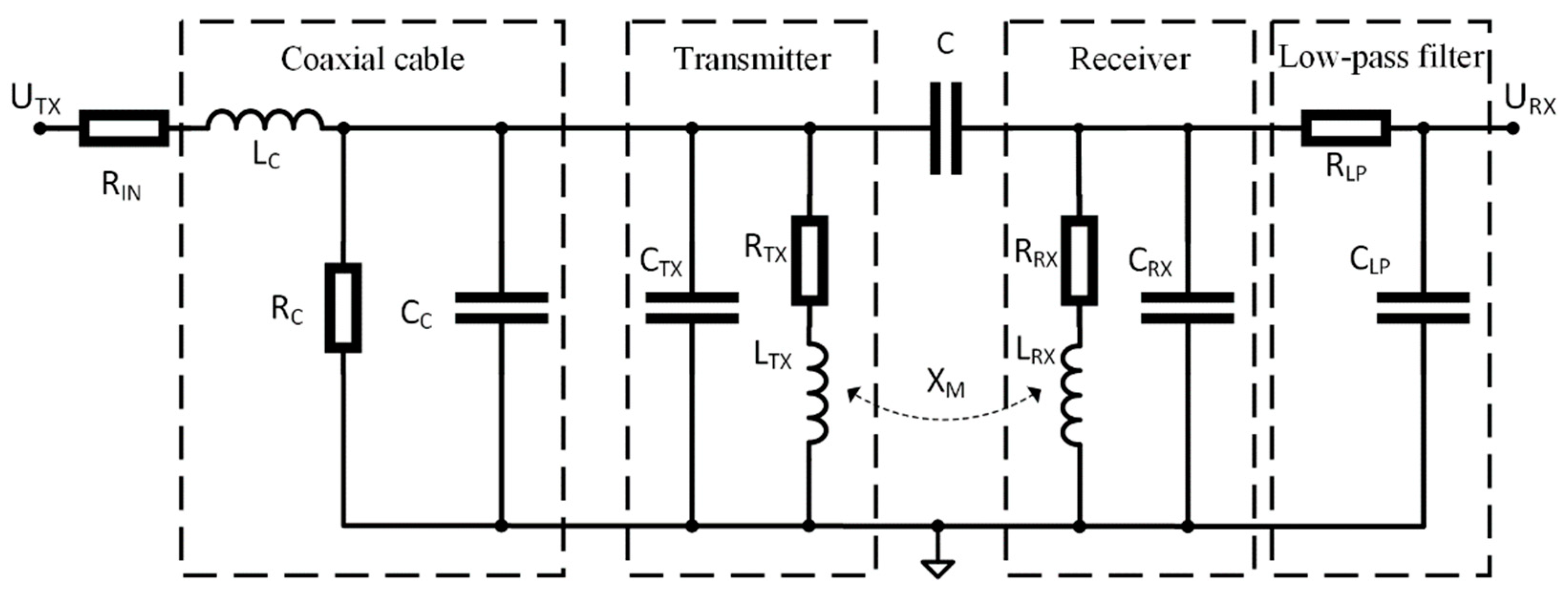
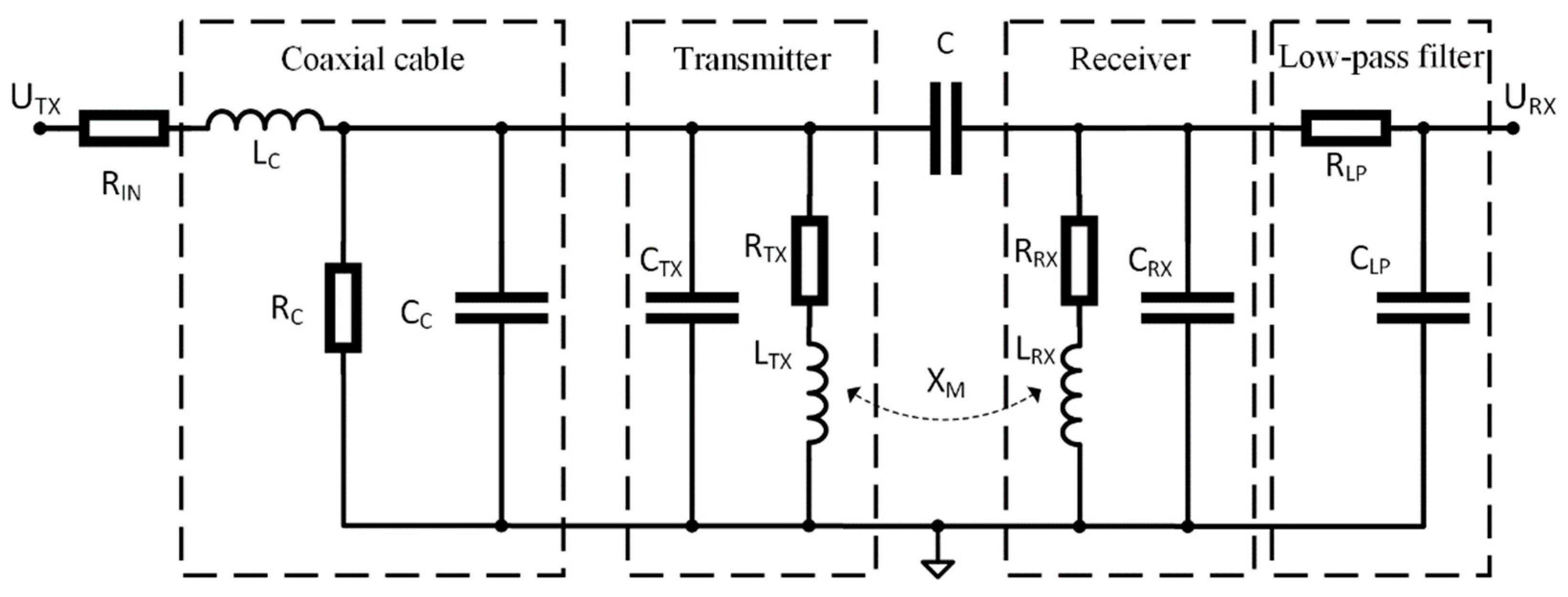
2.2. Equivalent Circuit Model
2.3. Experimental Procedure and Model Parameter Estimation
2.4. Summary of the Method for the Electrostatic Shielding Evaluation
- Derive the equivalent circuit model of an HFEMI sensor for the case where the medium under study is not present, i.e., the sensor in the air.
- Linearize the derived model with respect to the inductive and capacitive coupling parameters.
- Measure the impedance for each shielded coil of the sensor and estimate the parameters of its equivalent circuit using the laboratory impedance analyzer. The estimated parameters are used as the parameters of the HFEMI sensor linearized model.
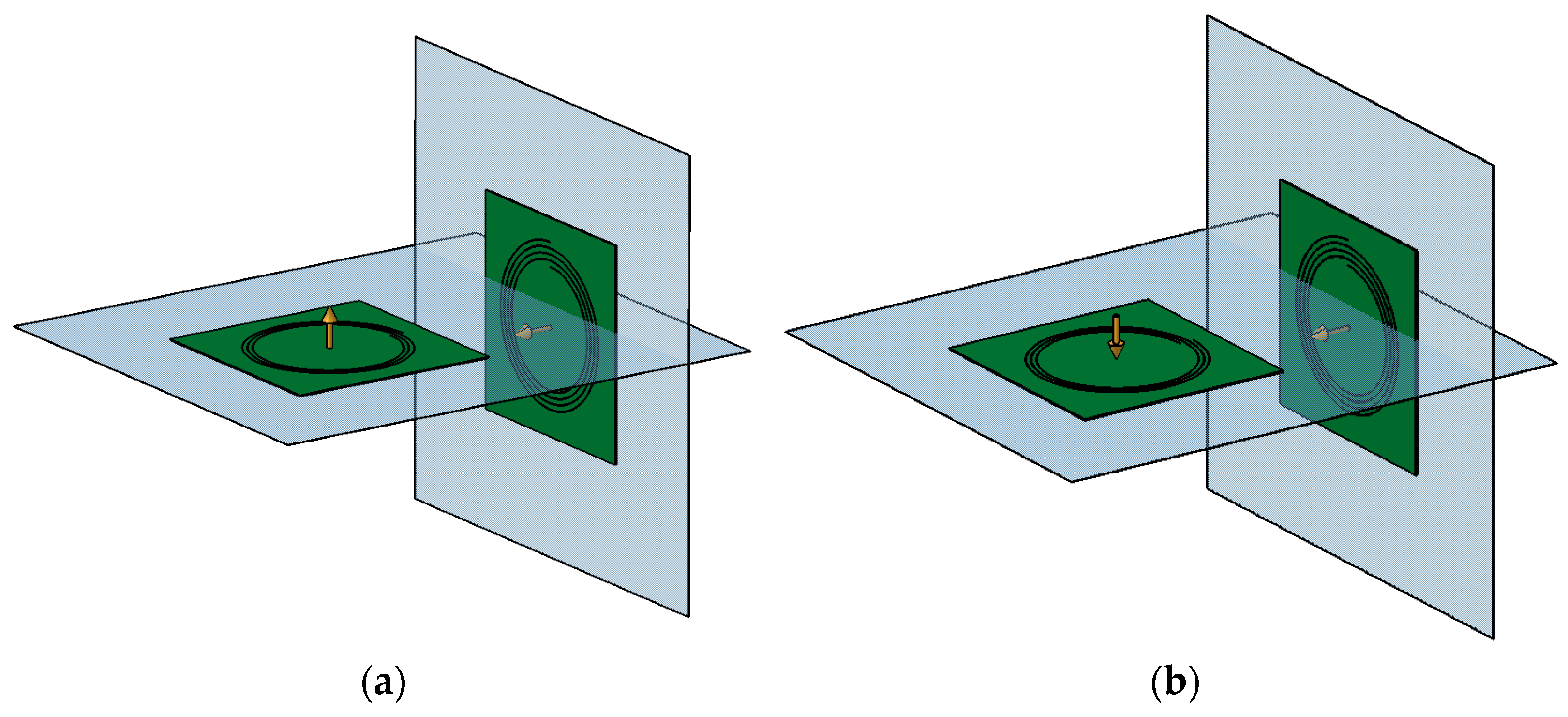
- Measure the sensor responses for two opposing transmitter orientations. Alternatively, if the transmitter cannot be reoriented, change the excitation current direction.
- Estimate the coupling parameters from the linearized model and the measured sensor response.
3. Results and Discussion
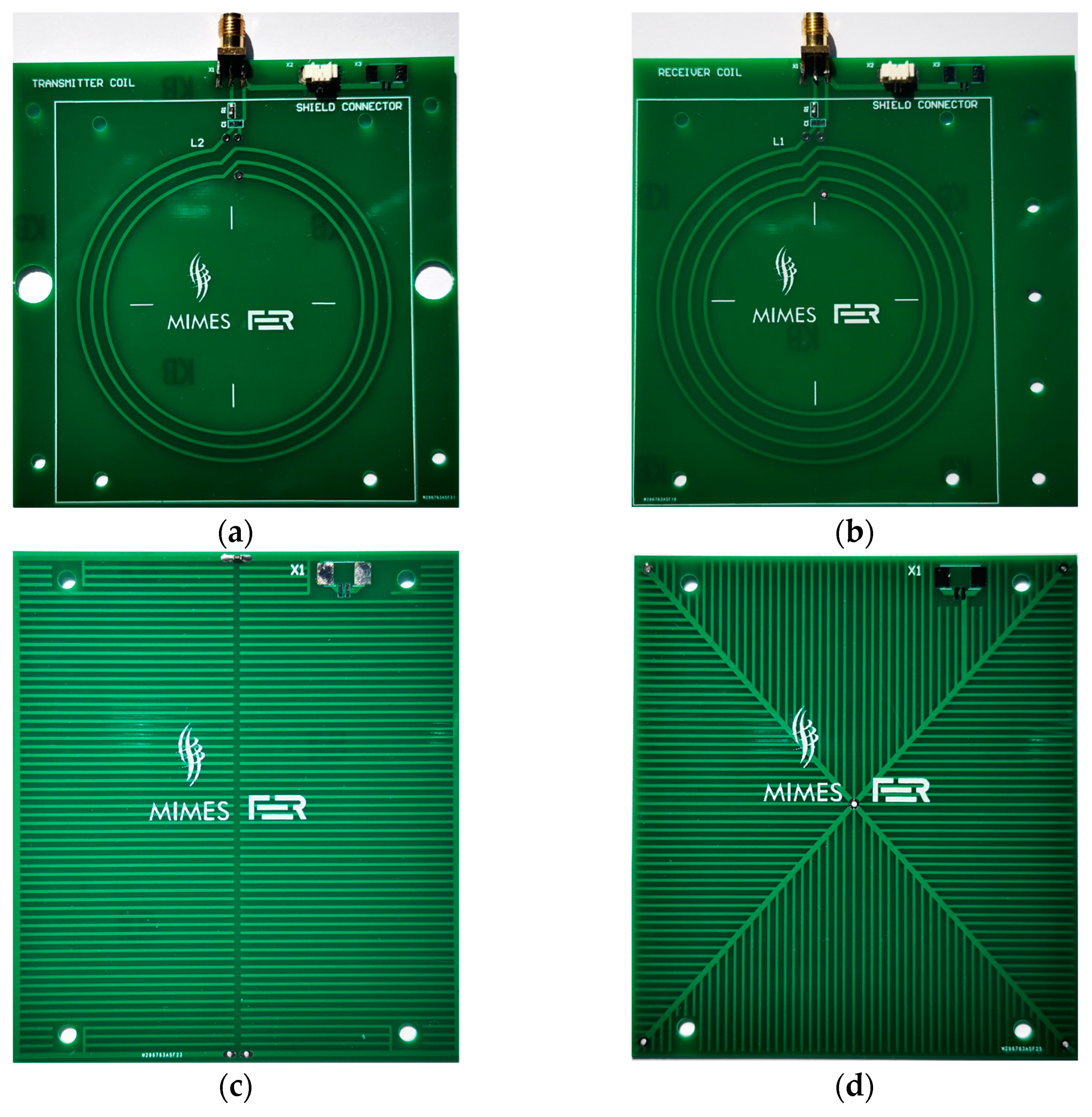
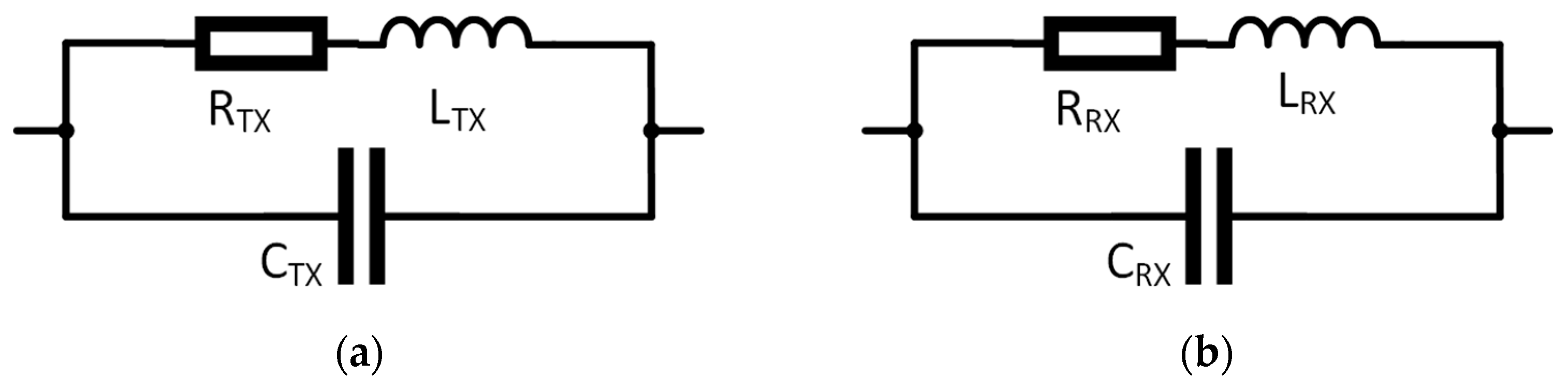
3.1. Measurement of Shielded Transmitter and Receiver Equivalent Circuit Parameters
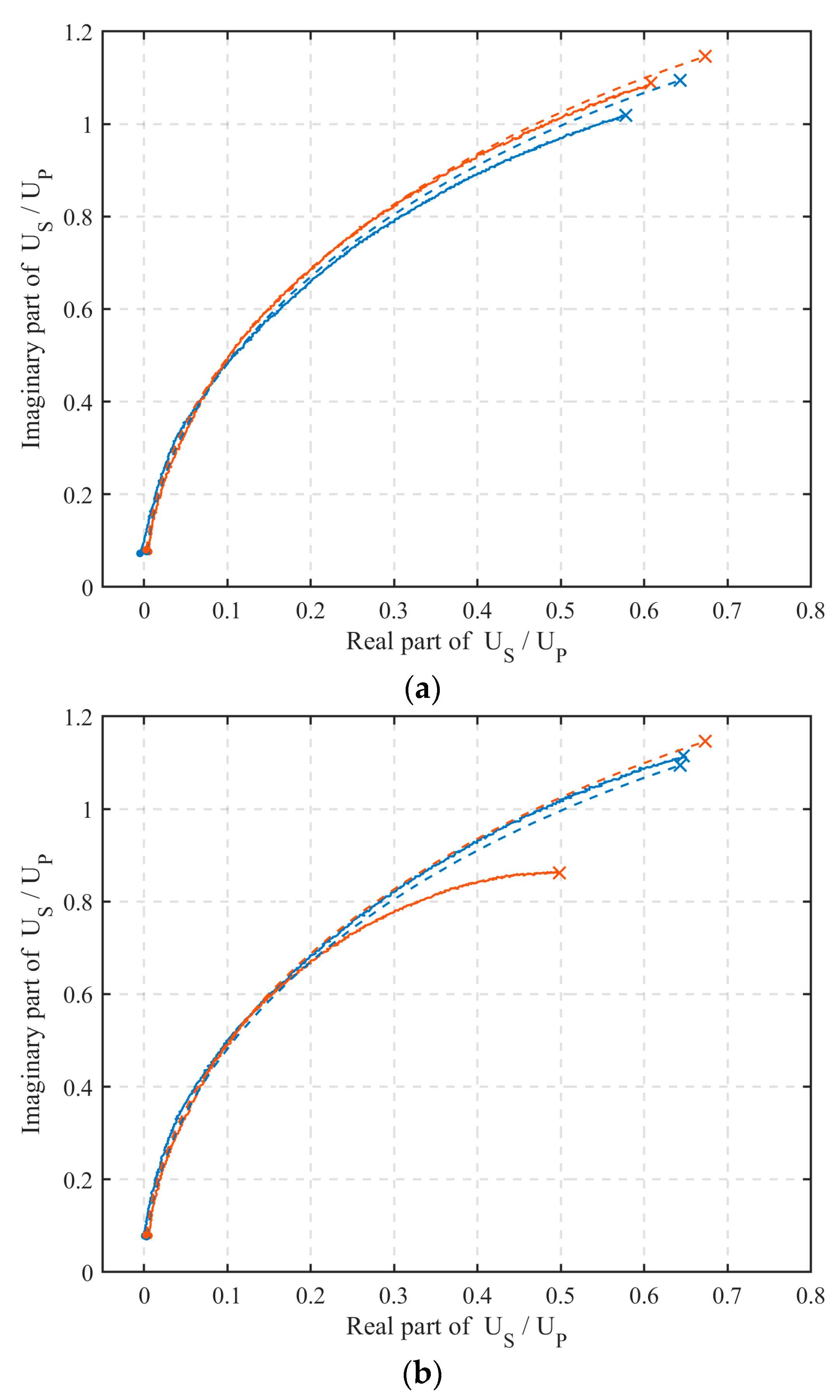
3.2. Estimation of Coupling Parameters
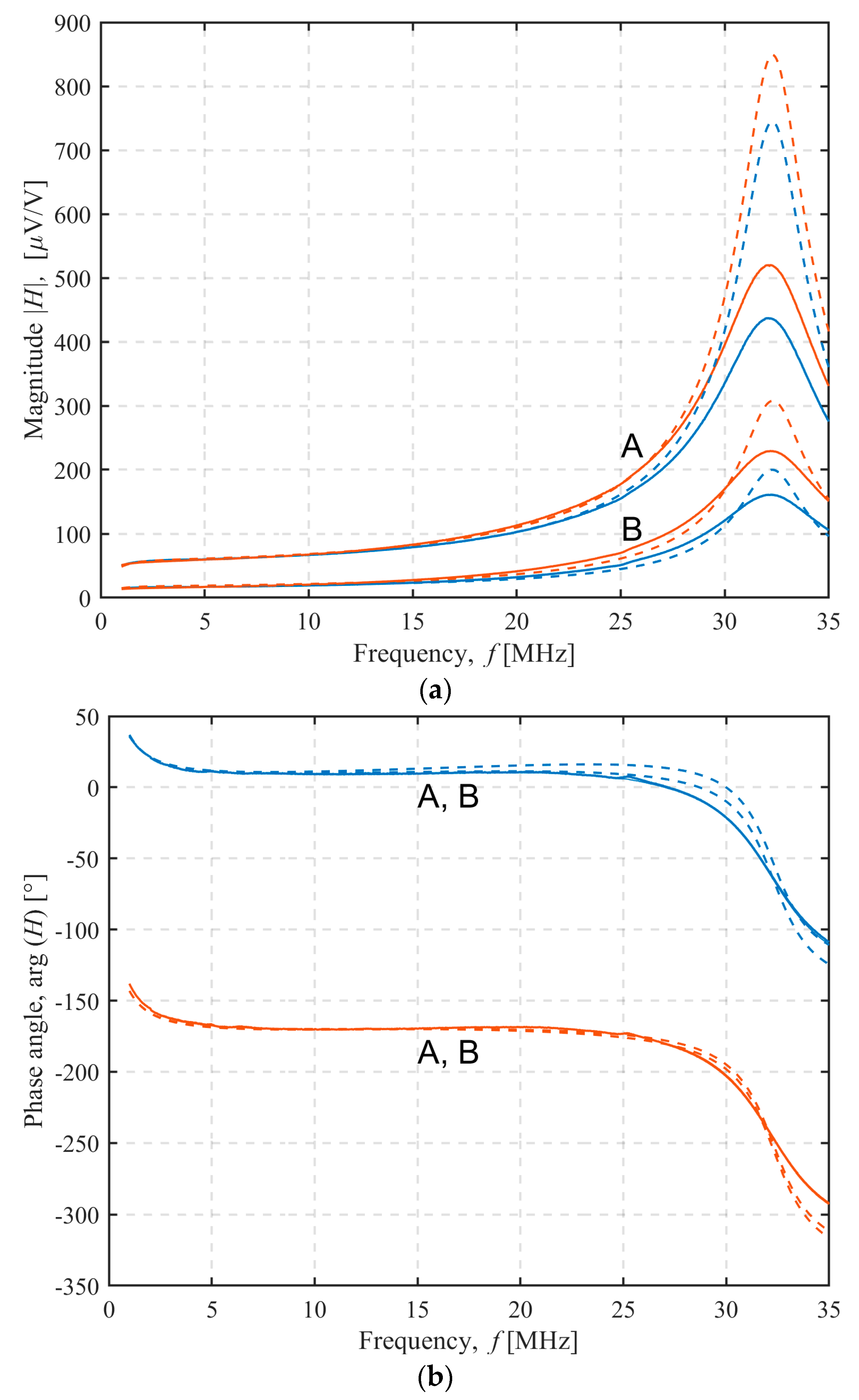
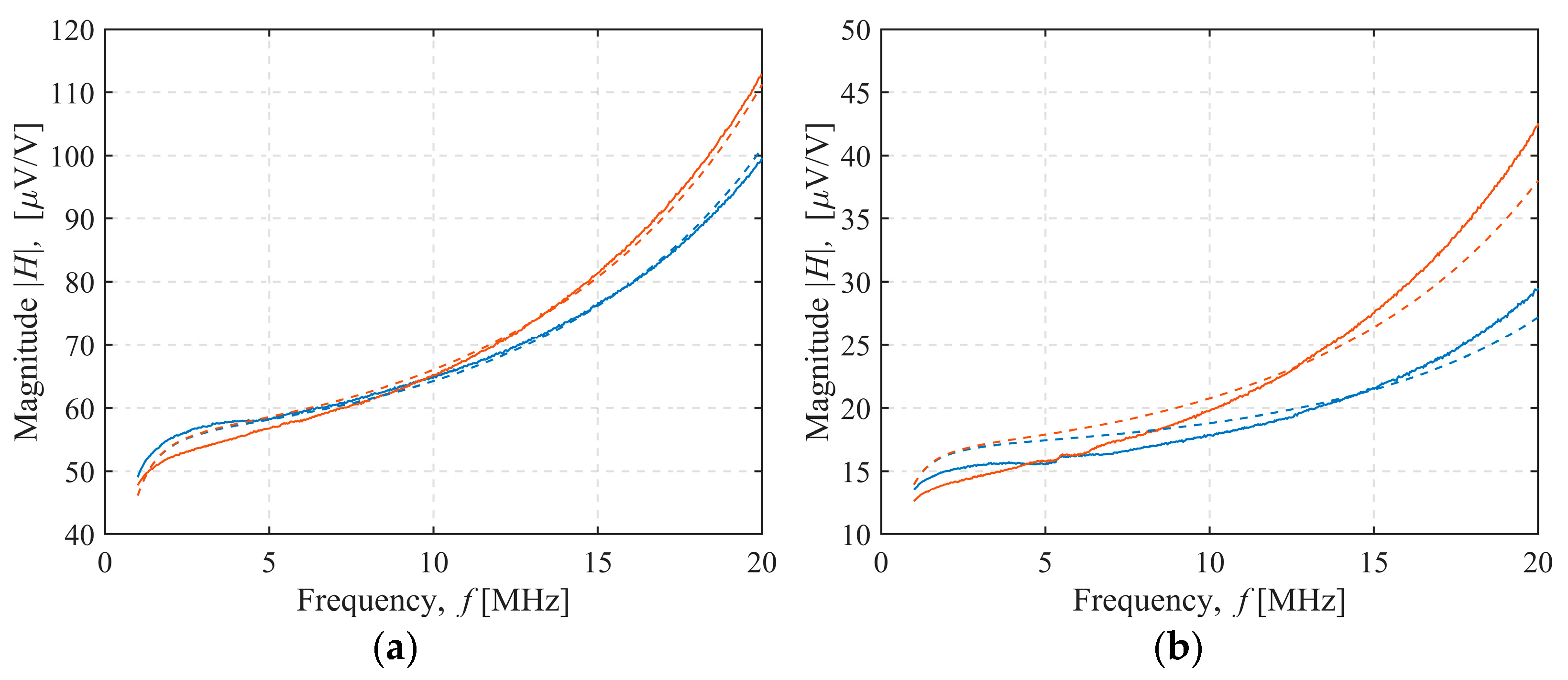
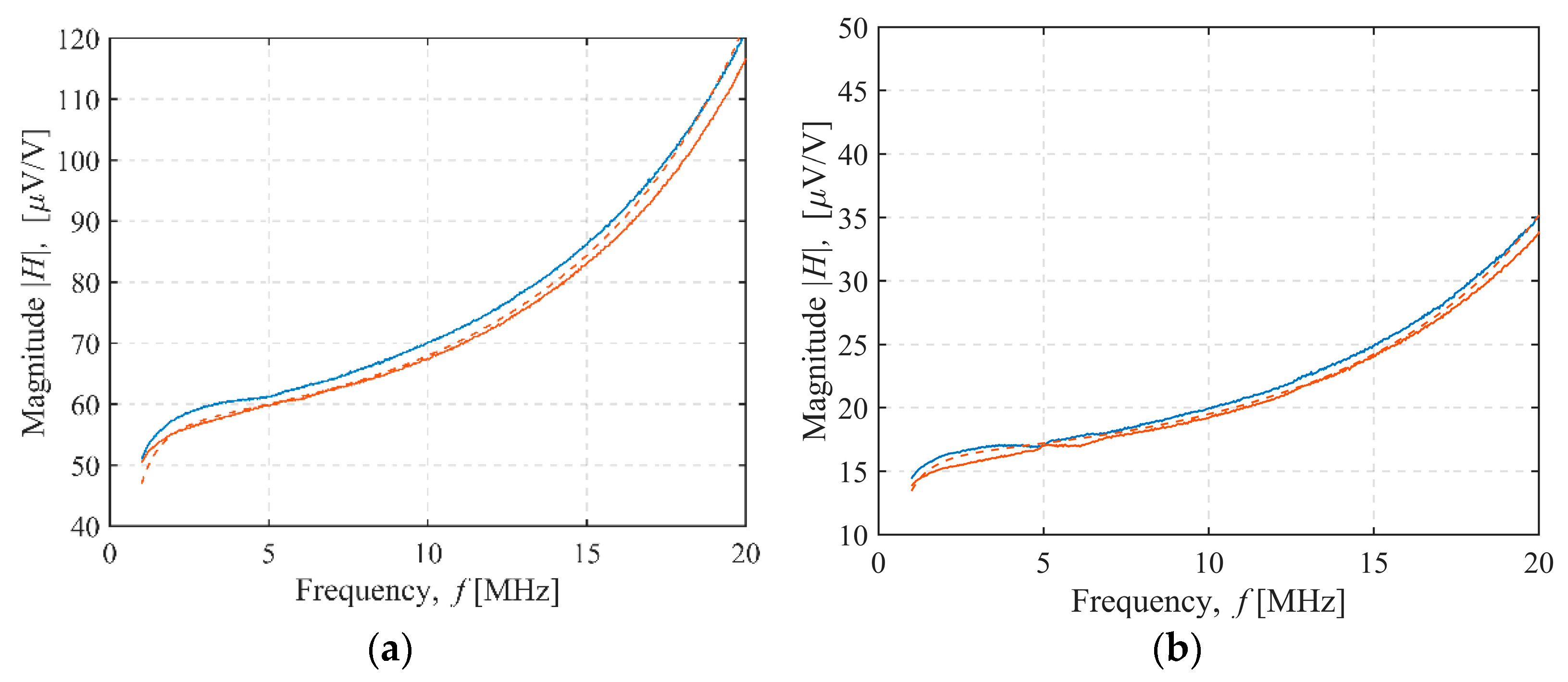
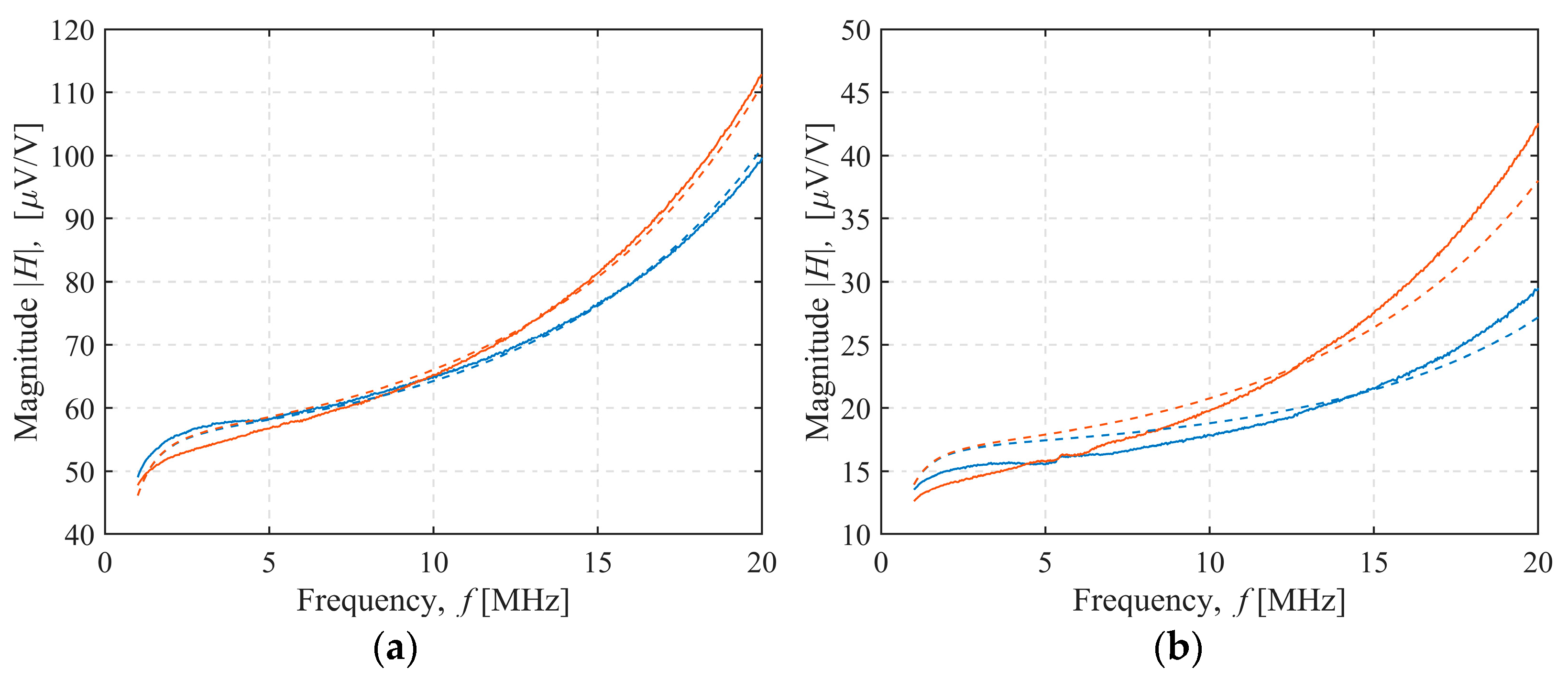
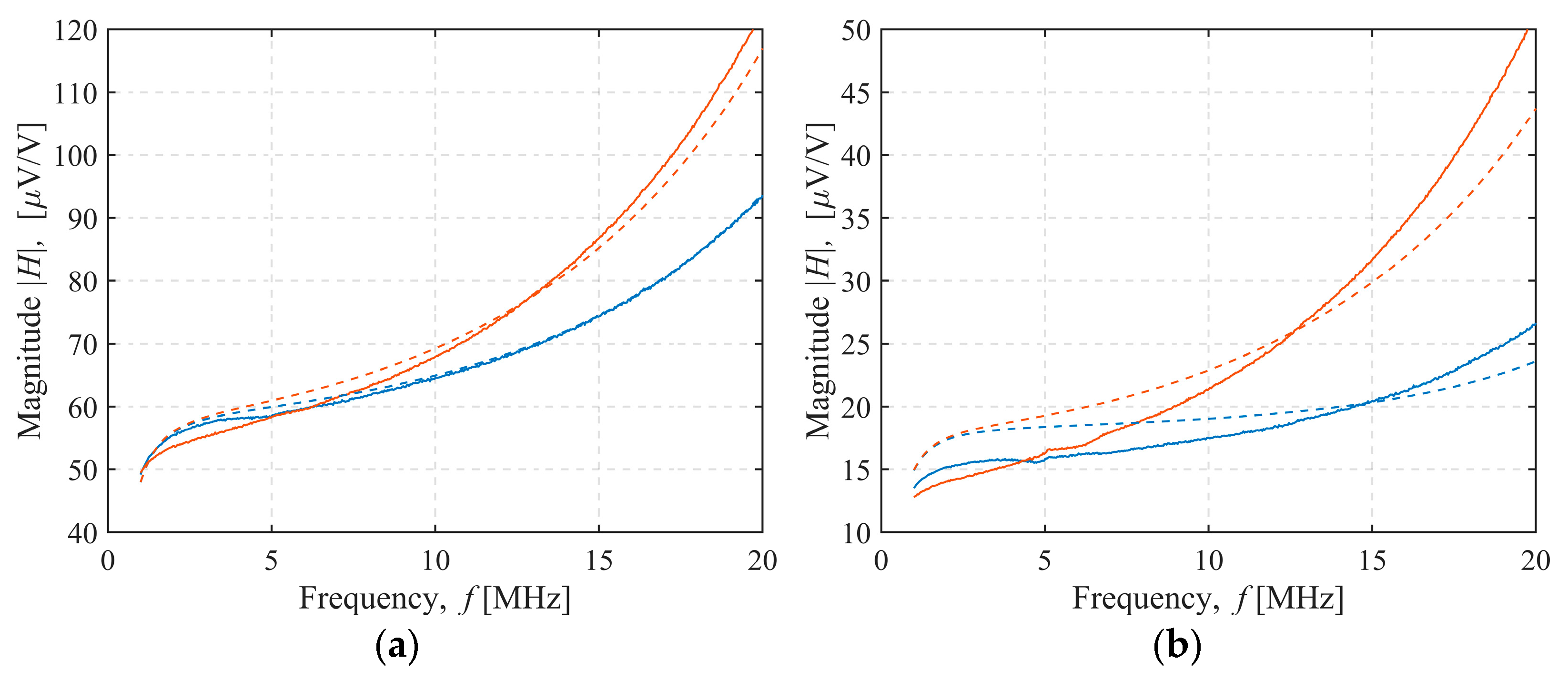
3.3. Effects of Shielding on the Sensor Transfer Function
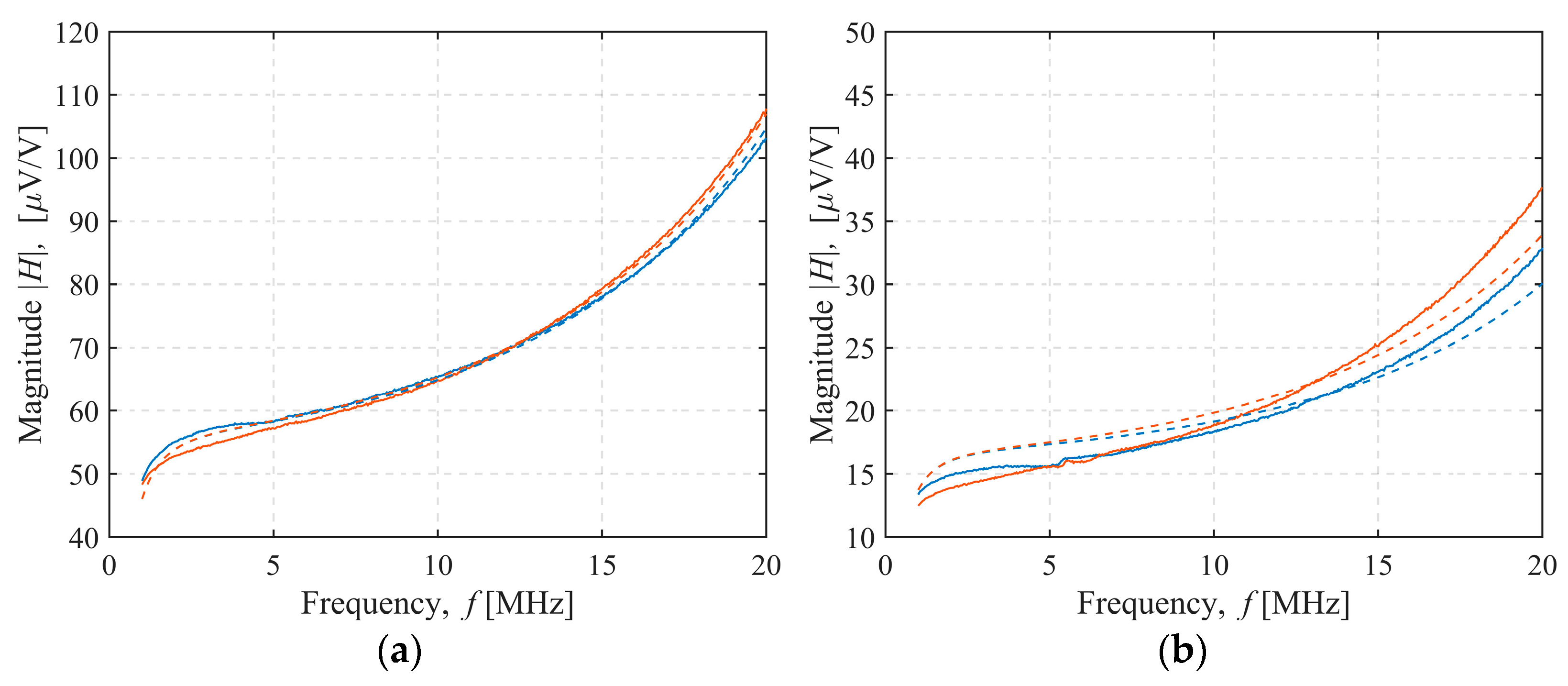
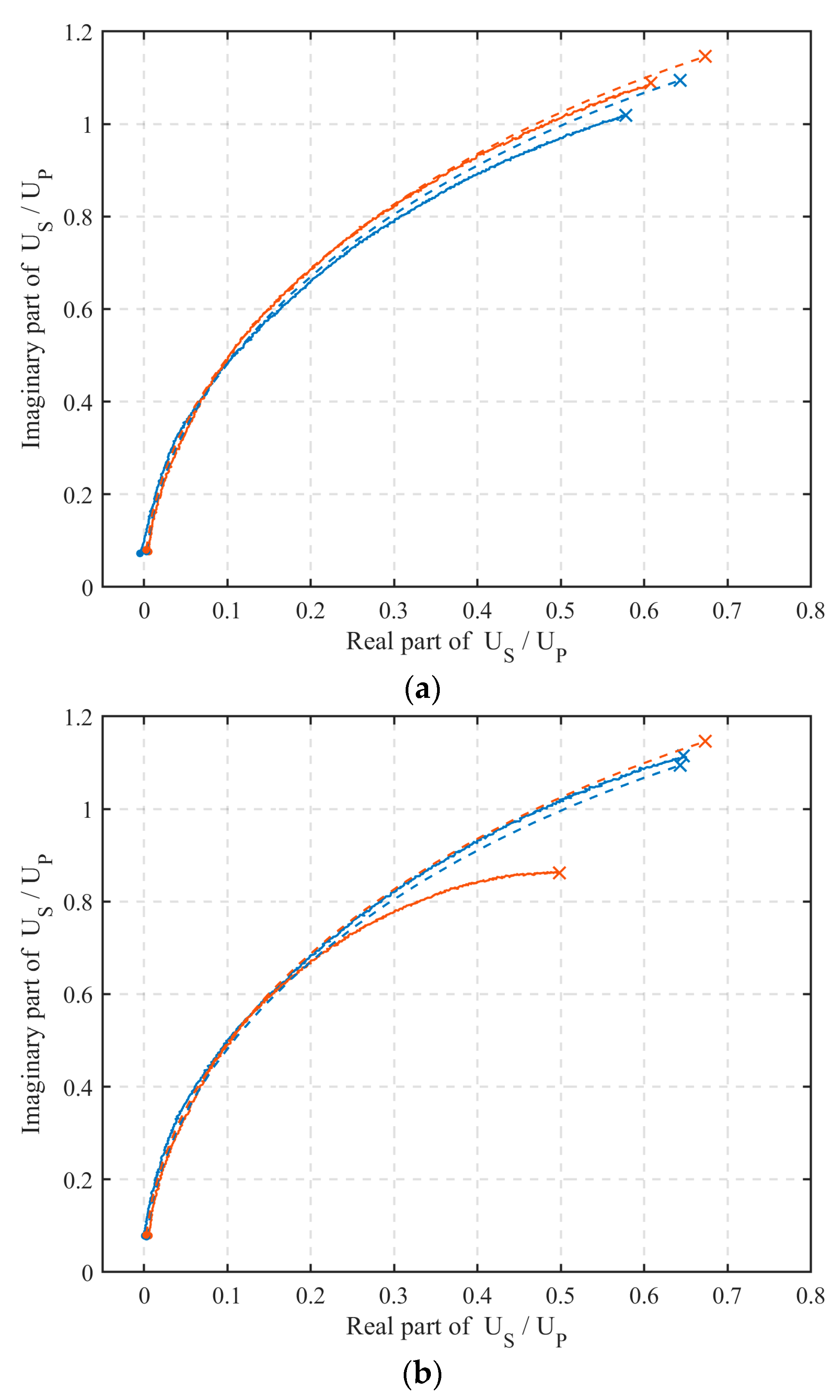
3.4. Shield Effectiveness Validation in the Presence of Conductive Medium
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Corwin, D.L.; Lesch, S.M. Apparent soil electrical conductivity measurements in agriculture. Comput. Electron. Agric. 2005, 46, 11–43. [Google Scholar] [CrossRef]
- Kuras, O.; Beamish, D.; Meldrum, P.I.; Ogilvy, R.D. Fundamentals of the capacitive resistivity technique. Geophysics 2006, 71, G135–G152. [Google Scholar] [CrossRef] [Green Version]
- Ambrus, D.; Spikic, D.; Vasic, D.; Bilas, V. Sensitivity profile of compact inductive sensor for apparent electrical conductivity of topsoil. In Proceedings of the 2017 IEEE Sensors, Glasgow, UK, 29 October–1 November 2017; pp. 1–3. [Google Scholar] [CrossRef]
- McNeill, J.D. Why Doesn’t Geonics Limited Build a Multi-Frequency EM31 or EM38? Available online: http://www.geonics.com/pdfs/technicalnotes/tn30.pdf (accessed on 21 April 2020).
- McNeill, J.D. Electromagnetic Terrain Conductivity Measurement at Low Induction. Available online: http://www.geonics.com/pdfs/technicalnotes/tn6.pdf (accessed on 25 January 2022).
- McNeill, J.D. Archaeological Mapping Using the Geonics EM38B to Map Terrain Magnetic Susceptibility (With Selected Case Histories). Available online: http://www.geonics.com/pdfs/technicalnotes/tn35.pdf (accessed on 25 January 2022).
- Stewart, D.C.; Anderson, W.L.; Grover, T.P.; Labson, V.F. Shallow subsurface mapping by electromagnetic sounding in the 300 kHz to 30 MHz range: Model studies and prototype system assessment. Geophysics 1994, 59, 1201–1210. [Google Scholar] [CrossRef]
- Tabbagh, A. Simultaneous measurement of electrical conductivity and dielectric permittivity of soils using a slingram electromagnetic device in medium frequency range. Archaeometry 1994, 36, 159–170. [Google Scholar] [CrossRef]
- Hatch, M.A.; Heinson, G.; Munday, T.; Thiel, S.; Lawrie, K.; Clarke, J.D.A.; Mill, P. The importance of including conductivity and dielectric permittivity information when processing low-frequency GPR and high-frequency EMI data sets. J. Appl. Geophys. 2013, 96, 77–86. [Google Scholar] [CrossRef]
- Goss, D.; Mackin, R.O.; Crescenzo, E.; Tapp, H.S.; Peyton, A.J. Understanding the coupling mechanisms in high frequency EMT. In Proceedings of the 3rd World Congress on Industrial Process Tomography, Banff, Canada, 2–5 September 2003; International Society for Industrial Process Tomography: Manchester, UK, 2003; pp. 364–369. [Google Scholar]
- Kessouri, P.; Flageul, S.; Vitale, Q.; Buvat, S.; Rejiba, F.; Tabbagh, A. Medium-frequency electromagnetic device to measure electric conductivity and dielectric permittivity of soils. Geophysics 2014, 81, E1–E16. [Google Scholar] [CrossRef] [Green Version]
- Geonics. EM38-MK2 Ground Conductivity Meter. Available online: http://www.geonics.com/html/em38.html (accessed on 25 January 2022).
- Špikić, D.; Vasić, D.; Ambruš, D.; Rep, I.; Bilas, V. Towards high frequency electromagnetic induction sensing of soil apparent electrical conductivity. In Proceedings of the I2MTC 2020—International Instrumentation and Measurement Technology Conference, Dubrovnik, Croatia, 25–28 May 2020. [Google Scholar] [CrossRef]
- Barrowes, B.; Prishvin, M.; Jutras, G.; Shubitidze, F. High-Frequency Electromagnetic Induction (HFEMI) Sensor Results from IED Constituent Parts. Remote Sens. 2019, 11, 2355. [Google Scholar] [CrossRef] [Green Version]
- Peyton, A.J. Electromagnetic induction tomography. In Industrial Tomography: Systems and Applications; Elsevier Inc.: Amsterdam, The Netherlands, 2015; pp. 61–107. ISBN 9781782421238. [Google Scholar]
- Zakaria, Z.; Rahim, R.A.; Mansor, M.S.B.; Yaacob, S.; Ayob, N.M.N.; Muji, S.Z.M.; Rahiman, M.H.F.; Aman, S.M.K.S. Advancements in Transmitters and Sensors for Biological Tissue Imaging in Magnetic Induction Tomography. Sensors 2012, 12, 7126–7156. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kazimierczuk, M.K. High-Frequency Magnetic Components, 2nd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2013; pp. 1–729. [Google Scholar] [CrossRef]
- Boyes, W. Instrumentation Reference Book; Elsevier: Amsterdam, The Netherlands, 2010; ISBN 9780750683081. [Google Scholar]
- Wei, H.Y.; Wilkinson, A.J. Design of a sensor coil and measurement electronics for magnetic induction tomography. IEEE Trans. Instrum. Meas. 2011, 60, 3853–3859. [Google Scholar] [CrossRef] [Green Version]
- Griffiths, H.; Gough, W.; Watson, S.; Williams, R.J. Residual capacitive coupling and the measurement of permittivity in magnetic induction tomography. Physiol. Meas. 2007, 28, S301. [Google Scholar] [CrossRef] [PubMed]
- Riedel, C.H.; Keppelen, M.; Nani, S.; Dössel, O. Capacitive effects and shielding in magnetic induction conductivity measurement. Biomed. Tech. Biomed. Eng. 2009, 48, 330–331. [Google Scholar] [CrossRef]
- O’Toole, M.D.; Marsh, L.A.; Davidson, J.L.; Tan, Y.M.; Armitage, D.W.; Peyton, A.J. Non-contact multi-frequency magnetic induction spectroscopy system for industrial-scale bio-impedance measurement. Meas. Sci. Technol. 2015, 26, 035102. [Google Scholar] [CrossRef]
- CST Studio Suite. 3D EM Simulation and Analysis Software. Available online: https://www.3ds.com/products-services/simulia/products/cst-studio-suite/ (accessed on 25 January 2022).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| C-2 | C-4 | C-6 | X-2 | X-4 | X-6 | |
|---|---|---|---|---|---|---|
| LTX (μH) | 1.101 | 1.117 | 1.124 | 1.084 | 1.108 | 1.117 |
| CTX (pF) | 12.05 | 9.78 | 9.04 | 11.68 | 9.58 | 8.77 |
| RTX (Ω) | 0.345 | 0.351 | 0.347 | 0.301 | 0.29 | 0.286 |
| LRX (μH) | 1.489 | 1.517 | 1.528 | 1.485 | 1.519 | 1.527 |
| CRX (pF) | 13.71 | 10.73 | 9.47 | 13.27 | 10.53 | 9.24 |
| RRX (Ω) | 0.399 | 0.386 | 0.404 | 0.428 | 0.421 | 0.409 |
| Coaxial Cable | |
|---|---|
| Lk (nH) | 40 |
| CC (pF) | 18.5 |
| Rk (kΩ) | 716 |
| Low-pass filter | |
| CLP (pF) | 6.9 |
| RLP (Ω) | 499 |
| Transmitter Coil (TX) | ||||||||
|---|---|---|---|---|---|---|---|---|
| C-2 | C-4 | C-6 | X-2 | X-4 | X-6 | |||
| Receiver coil (RX) | C-2 | 66.63 | 68.11 | 67.59 | 65.67 | 66.85 | 67.66 | M (pH) |
| C-4 | 68.06 | 68.58 | 68.24 | 66.92 | 67.87 | 65.25 | ||
| C-6 | 69.22 | 69.71 | 69.58 | 68.48 | 69.31 | 69.68 | ||
| X-2 | 62.69 | 63.83 | 63.55 | 61.34 | 62.68 | 63.09 | ||
| X-4 | 65.31 | 66.02 | 65.13 | 64.16 | 65.5 | 64.89 | ||
| X-6 | 67.83 | 68.63 | 68.36 | 67.24 | 68.29 | 68.49 | ||
| C-2 | 5.1 | 5.2 | 5.2 | 4.9 | 5 | 5 | k (0.1 pH/MHz) | |
| C-4 | 5.2 | 5.3 | 5.1 | 5 | 5.1 | 5 | ||
| C-6 | 5.3 | 5.4 | 5.2 | 5.3 | 5.4 | 5.4 | ||
| X-2 | 4.8 | 4.8 | 4.9 | 4.6 | 4.8 | 4.8 | ||
| X-4 | 4.9 | 5 | 5.1 | 5 | 5.1 | 5 | ||
| X-6 | 5.3 | 5.3 | 5.6 | 5.8 | 5.4 | 5.4 | ||
| C2 | 0 | 0 | 0 | 0 | 0 | 0 | C (10−17 F) | |
| C4 | 0 | 0 | 3.6 | 1.3 | 2.8 | 8.7 | ||
| C6 | 0 | 2.7 | 10.3 | 8.1 | 14.2 | 21.2 | ||
| X2 | 0 | 0 | 3.3 | 0 | 2.9 | 9.8 | ||
| X4 | 0 | 3.2 | 10.4 | 9.8 | 14.4 | 23.2 | ||
| X6 | 0 | 8 | 18.2 | 16.4 | 24.3 | 34.7 | ||
| Transmitter Coil (TX) | ||||||||
|---|---|---|---|---|---|---|---|---|
| C-2 | C-4 | C-6 | X-2 | X-4 | X-6 | |||
| Receiver coil (RX) | C-2 | 19.09 | 19.39 | 18.91 | 18.76 | 19.23 | 18.7 | M (pH) |
| C-4 | 20.02 | 20.23 | 20.59 | 19.75 | 20.27 | 20.34 | ||
| C-6 | 21.12 | 21.88 | 21.32 | 20.79 | 21.85 | 21.3 | ||
| X-2 | 18.03 | 18.23 | 19.31 | 17.82 | 18.2 | 19.25 | ||
| X-4 | 19.56 | 19.68 | 20.21 | 19.45 | 19.82 | 20.19 | ||
| X-6 | 21.07 | 21.26 | 21.22 | 20.88 | 21.44 | 21.31 | ||
| C-2 | 0.7 | 0.7 | 0.7 | 0.7 | 0.7 | 0.7 | k (0.1 pH/MHz) | |
| C-4 | 0.8 | 0.8 | 0.8 | 0.8 | 0.8 | 0.8 | ||
| C-6 | 0.9 | 0.9 | 0.8 | 0.9 | 0.9 | 0.9 | ||
| X-2 | 0.7 | 0.7 | 0.8 | 0.7 | 0.7 | 0.8 | ||
| X-4 | 0.8 | 0.8 | 0.8 | 0.8 | 0.8 | 0.8 | ||
| X-6 | 0.9 | 0.9 | 0.9 | 0.9 | 0.9 | 0.9 | ||
| C2 | 0 | 0 | 0 | 0 | 0 | 0.6 | C (10−17 F) | |
| C4 | 0 | 1.5 | 5.7 | 4.7 | 6.2 | 10.3 | ||
| C6 | 0.5 | 5.3 | 11 | 10.3 | 15.3 | 20.2 | ||
| X2 | 0 | 2.2 | 5.4 | 5 | 8.4 | 11 | ||
| X4 | 1.1 | 5.6 | 11.4 | 10.8 | 15.8 | 20.5 | ||
| X6 | 2.6 | 9.7 | 17.8 | 16.8 | 24.6 | 31 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Špikić, D.; Švraka, M.; Vasić, D. Effectiveness of Electrostatic Shielding in High-Frequency Electromagnetic Induction Soil Sensing. Sensors 2022, 22, 3000. https://doi.org/10.3390/s22083000
Špikić D, Švraka M, Vasić D. Effectiveness of Electrostatic Shielding in High-Frequency Electromagnetic Induction Soil Sensing. Sensors. 2022; 22(8):3000. https://doi.org/10.3390/s22083000
Chicago/Turabian StyleŠpikić, Dorijan, Matija Švraka, and Darko Vasić. 2022. "Effectiveness of Electrostatic Shielding in High-Frequency Electromagnetic Induction Soil Sensing" Sensors 22, no. 8: 3000. https://doi.org/10.3390/s22083000
APA StyleŠpikić, D., Švraka, M., & Vasić, D. (2022). Effectiveness of Electrostatic Shielding in High-Frequency Electromagnetic Induction Soil Sensing. Sensors, 22(8), 3000. https://doi.org/10.3390/s22083000