
A Fast Firefly Algorithm for Function Optimization: Application to the Control of BLDC Motor




Abstract
:1. Introduction
2. Firefly Algorithm and Proposed Fast Firefly Algorithm
2.1. Standard Firefly Algorithm
| Algorithm 1. Firefly Algorithm |
| Initialization of the parameters of FA (Population size, α, βo, γ and the number of iterations). The Light intensity is defined by the cost function f(xi) where xi(i = 1,…,n). While (iter < Max Generation). for i = 1:n (all n fireflies) for j = 1:n (all n fireflies) if (f(xi) < f(xj)), move firefly i towards j, end if. Update attractiveness β with distance r. Evaluate new solution and update f(xi) in the same way as (4). end for j end for i rank the solutions and find the best global optimal. end while. Show the results. |
2.2. Fast Firefly Algorithm
| Algorithm 2. Fast Firefly Algorithm |
| While (iter < Max Generation) for k = 1:K.n (all n fireflies) // Here it is the first modification i = rand(n) // Here it is the second modification j = rand(n) // Here it is the third modification if (f(xi) < f(xj)), move firefly i towards j, end if. Update attractiveness β with distance r. Evaluate new solution and update f(xi) in the same way as Equation (4). Modify the new position obtained by Equation (4) according to Equation (5). end for k rank the solutions and find the best global optimal. end while. Show the results. |
3. Simulation Results and Analysis
3.1. Benchmark Functions
3.2. Parameter Settings
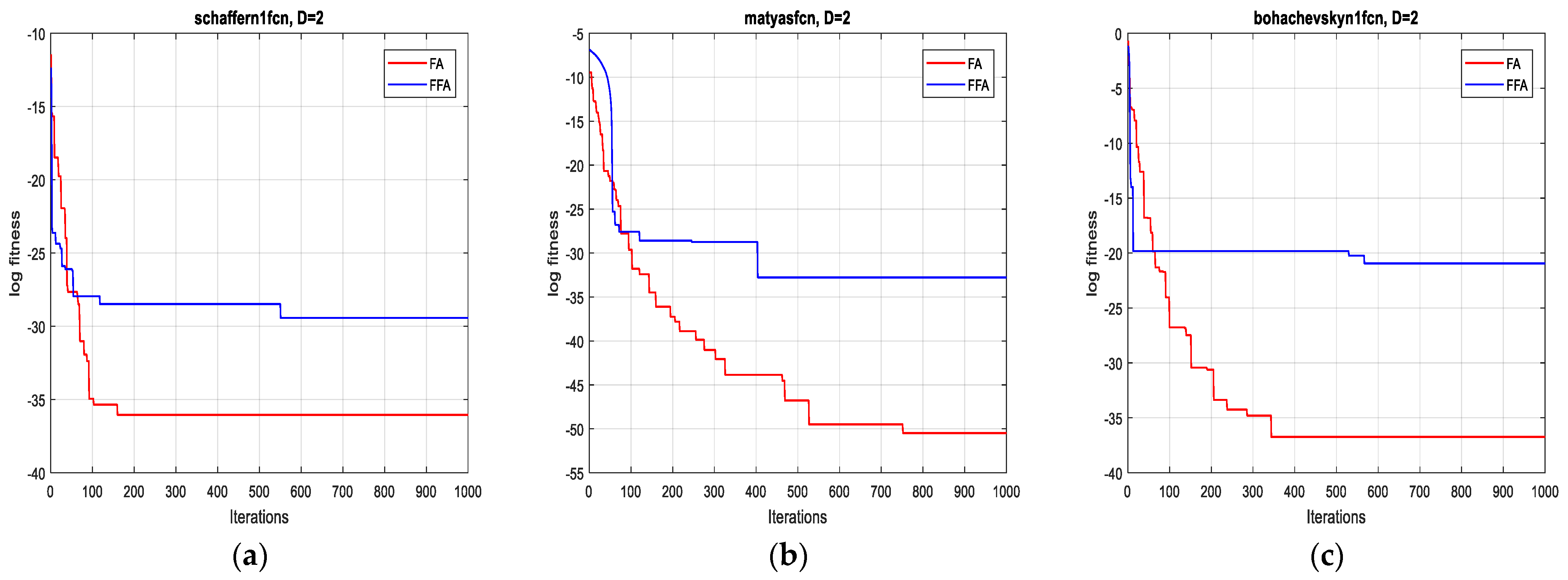
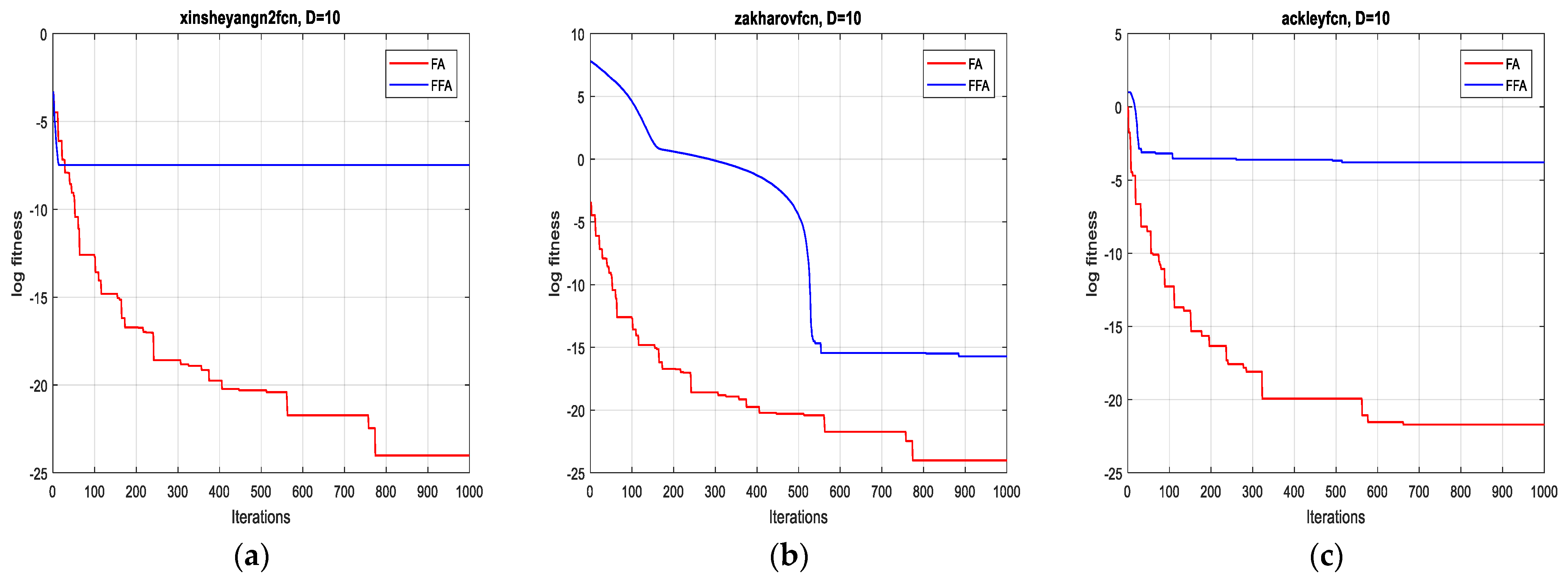
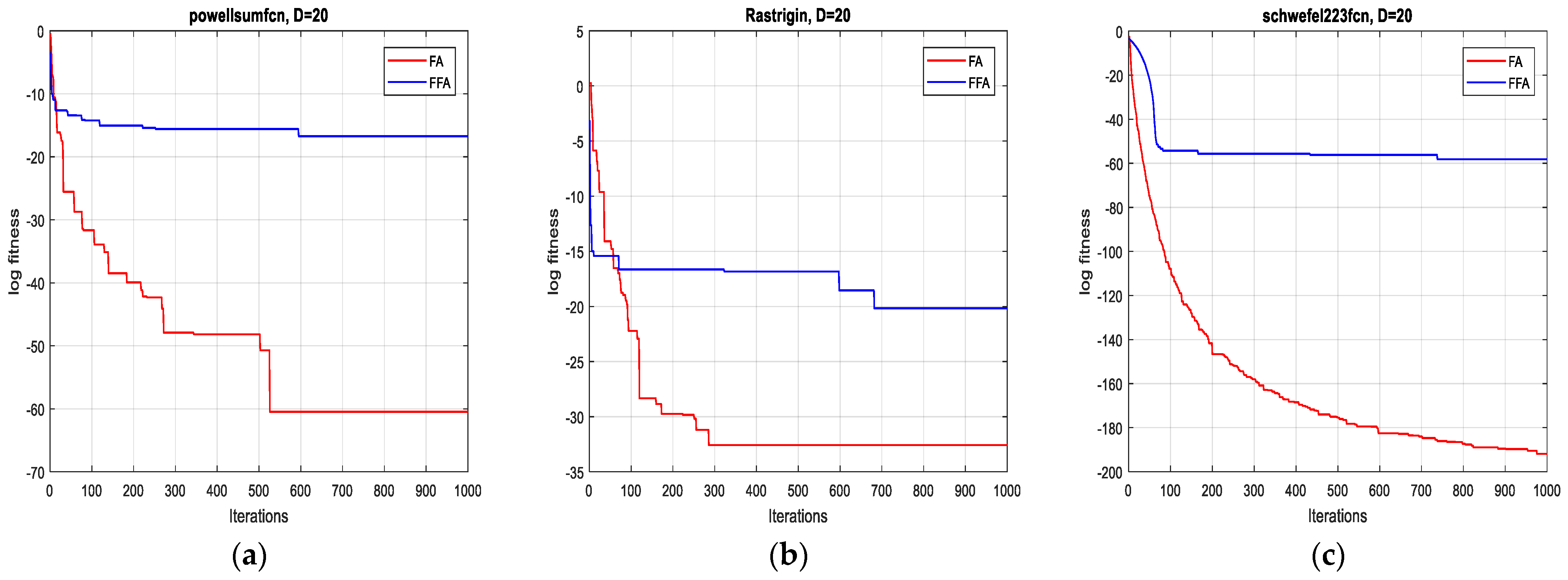
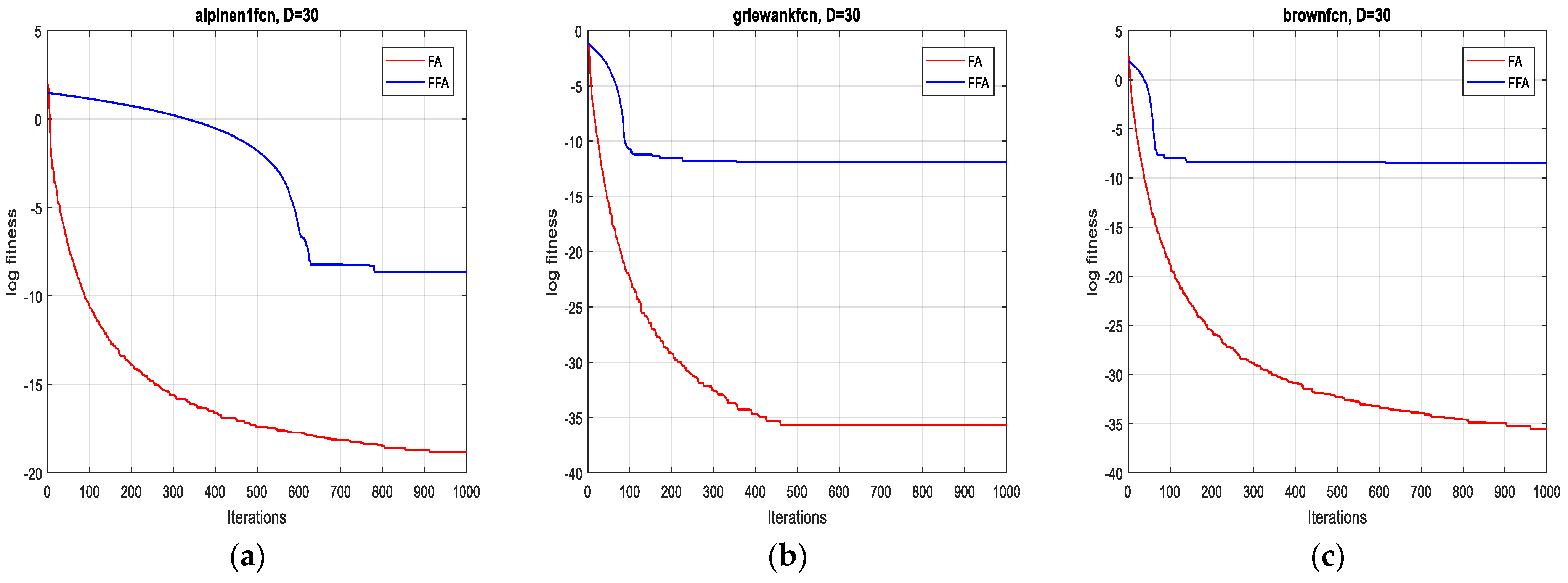
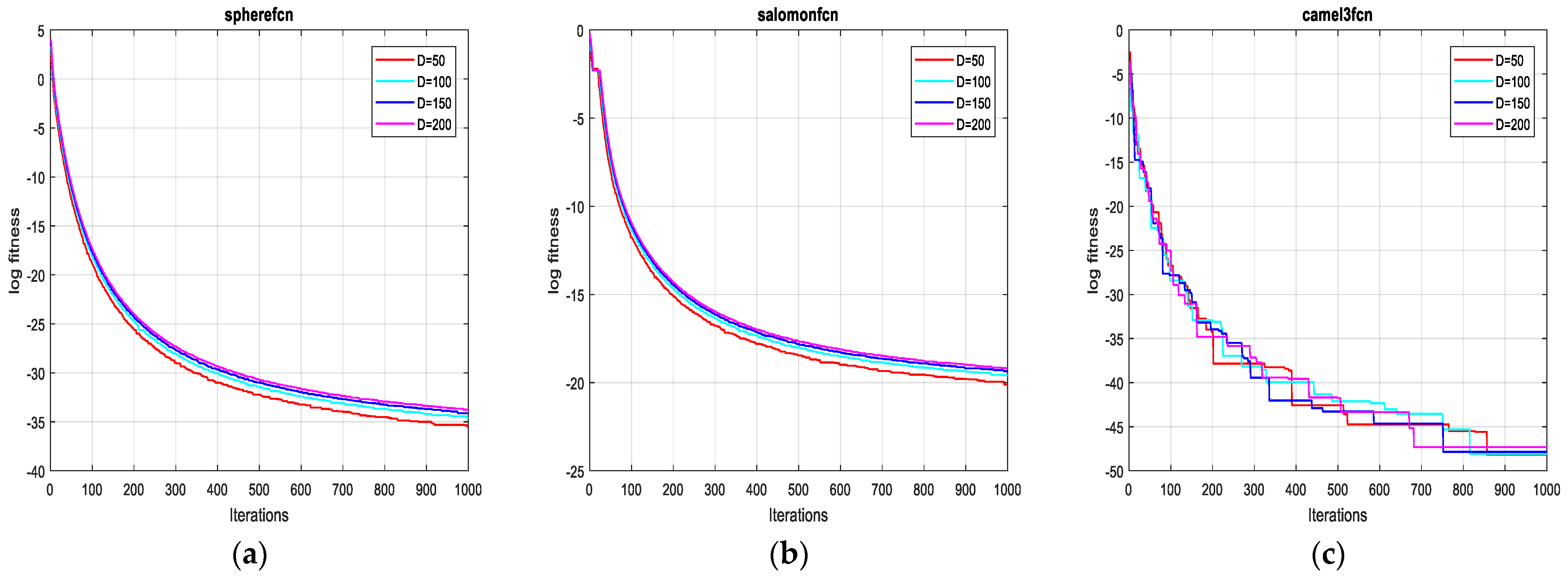
3.3. Functions’ Experimental Results
4. Application for the Control of Brushless DC Motor
4.1. Description
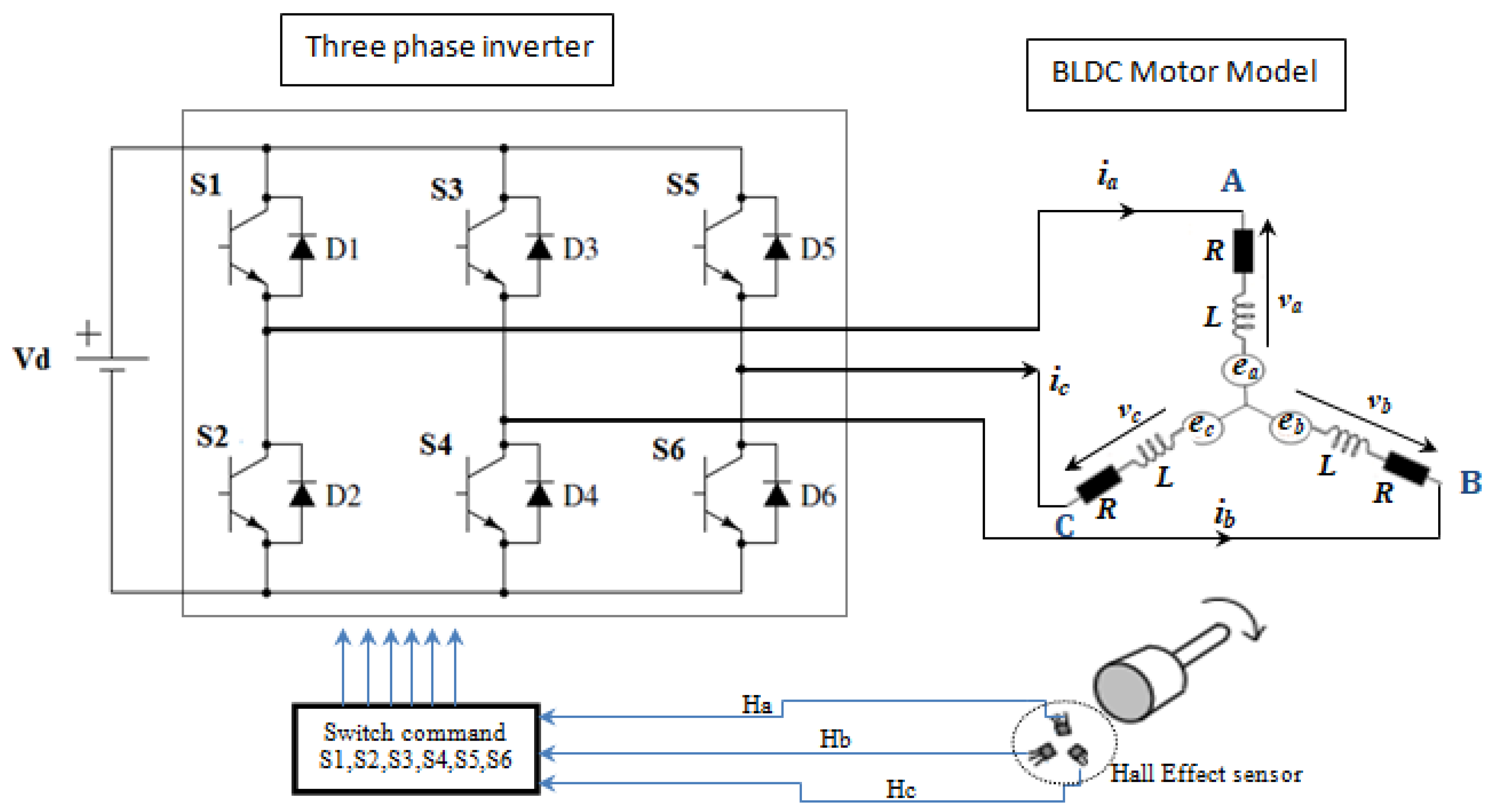
4.2. Mathematical Modeling of a BLDC Motor
- R: resistance of a stator phase [Ω].
- L: inductance of a stator phase [H].
- va, vb and vc are the stator phase voltages [V].
- vab, vbc and vca are the stator phase to phase voltages [V].
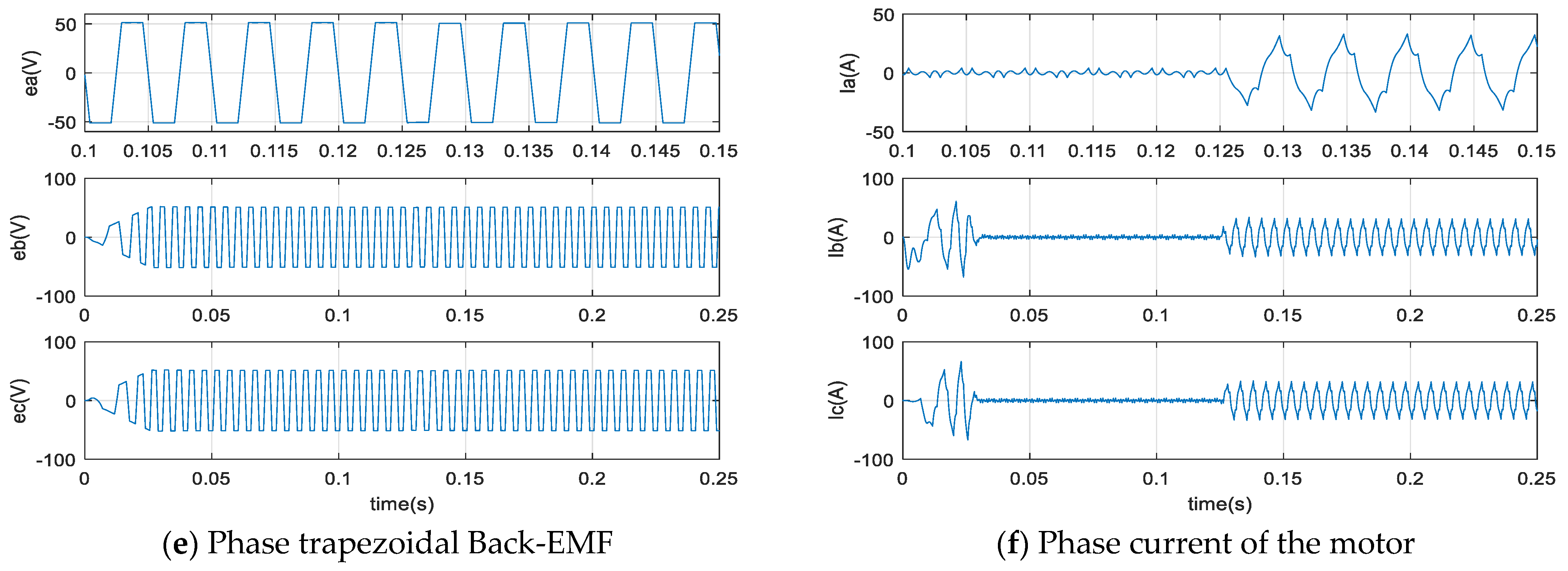
- ia, ib and ic are stator phase currents [A]
- ea, eb and ec are motor Back-EMFs [V].
- Te and TL are the electromagnetic torque and the load torque [Nm].
- J is the rotor inertia, kf is a friction constant and ωm is the rotor speed [rad/s].
- ke is the Back-EMF’s constant.
- is equal to the rotor angle (= p./2), the mechanic angle and p the number of pole pairs. F() is trapezoidal waveform of Back-EMFs.
- kt: the torque constant.
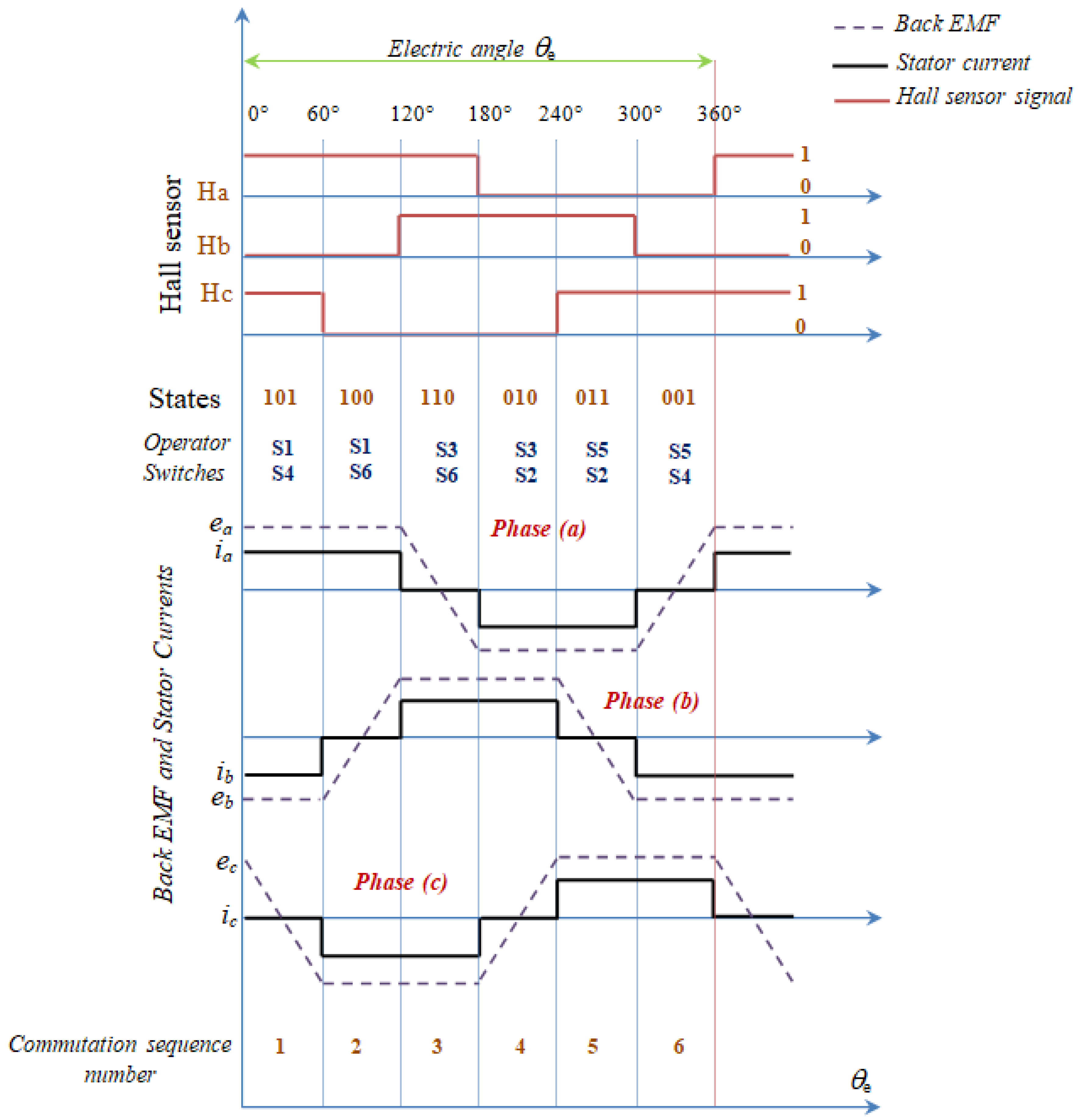
4.3. Hall Effect Sensor and Transistor Switching Sequence
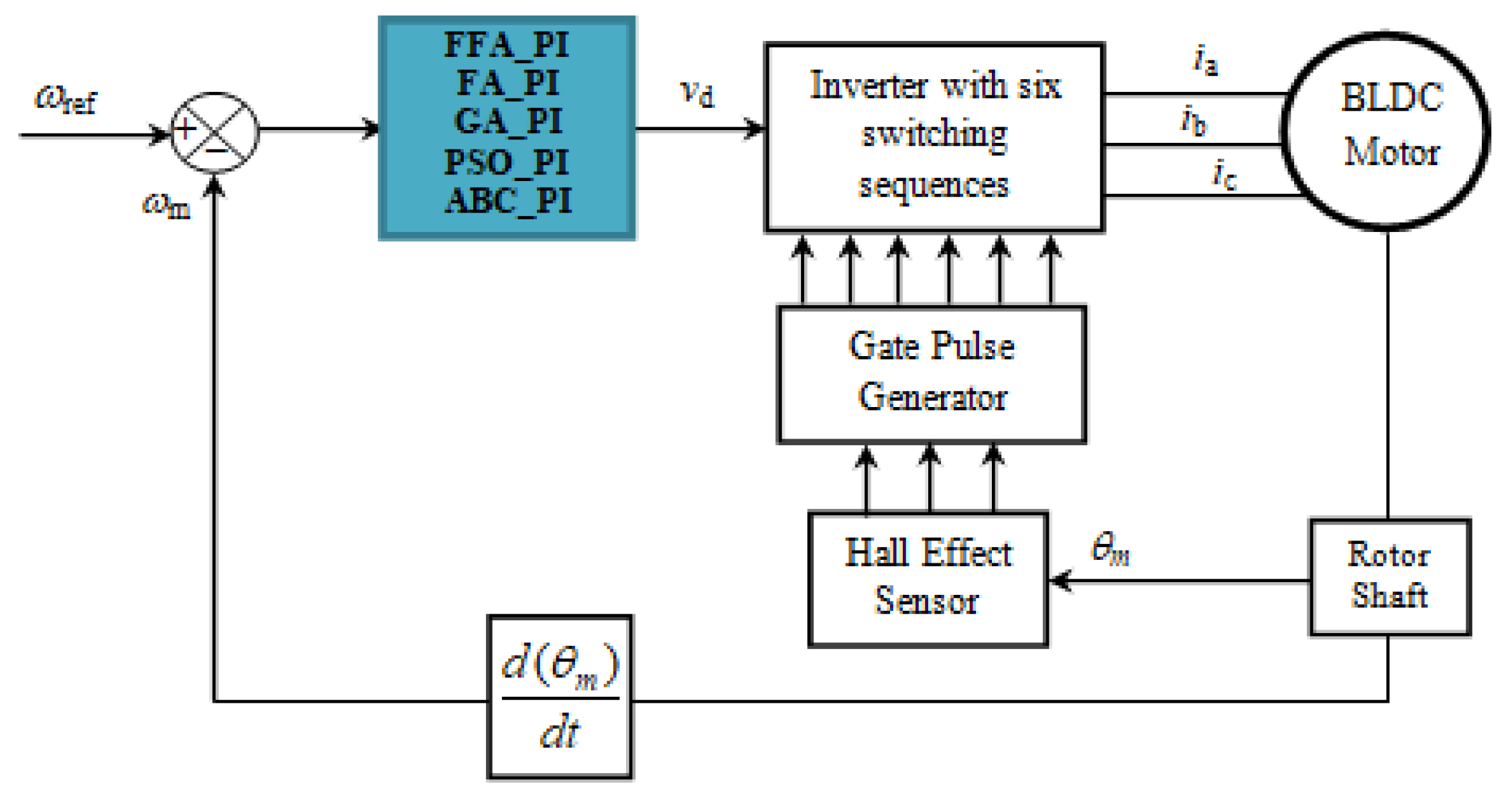
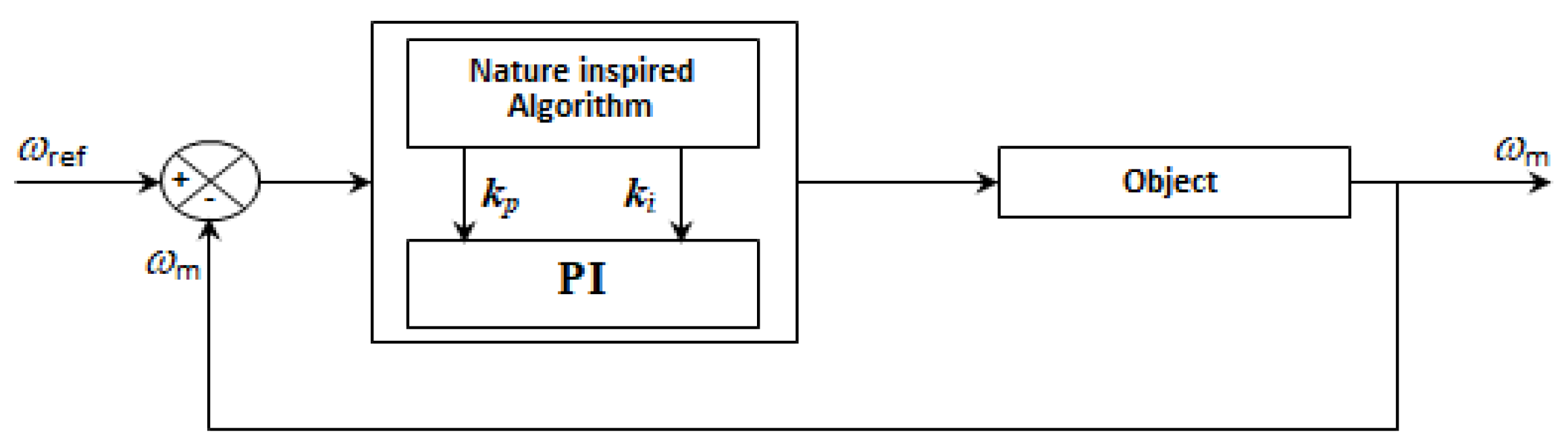
4.4. Speed Control of Brushless DC Motor
4.5. PI Controller
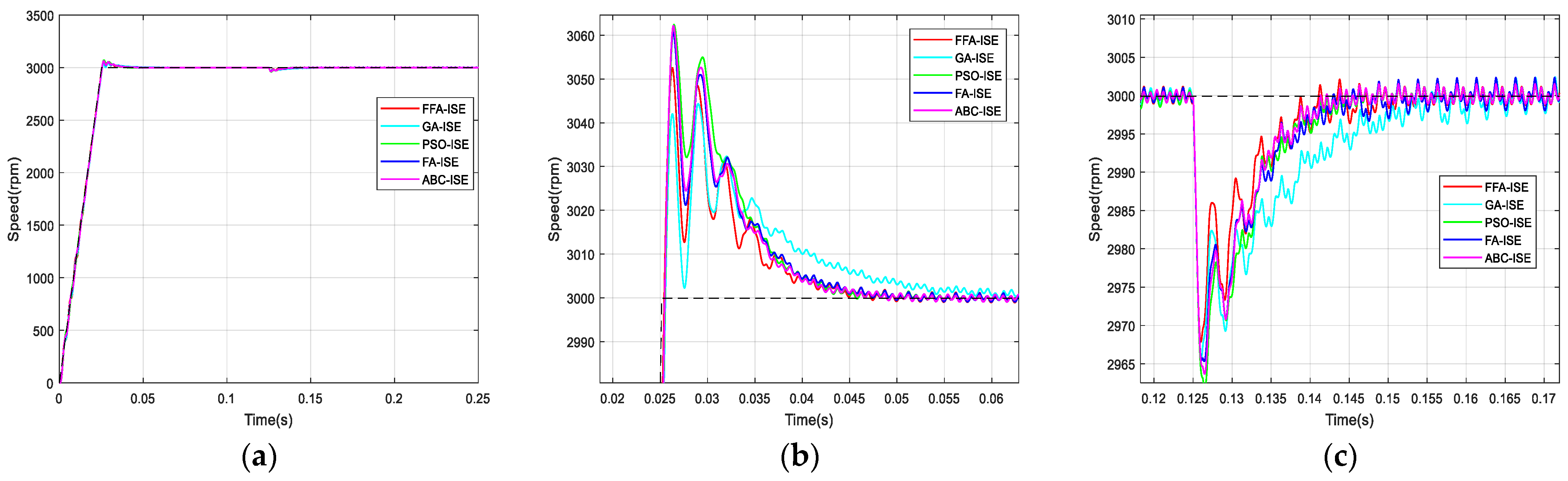
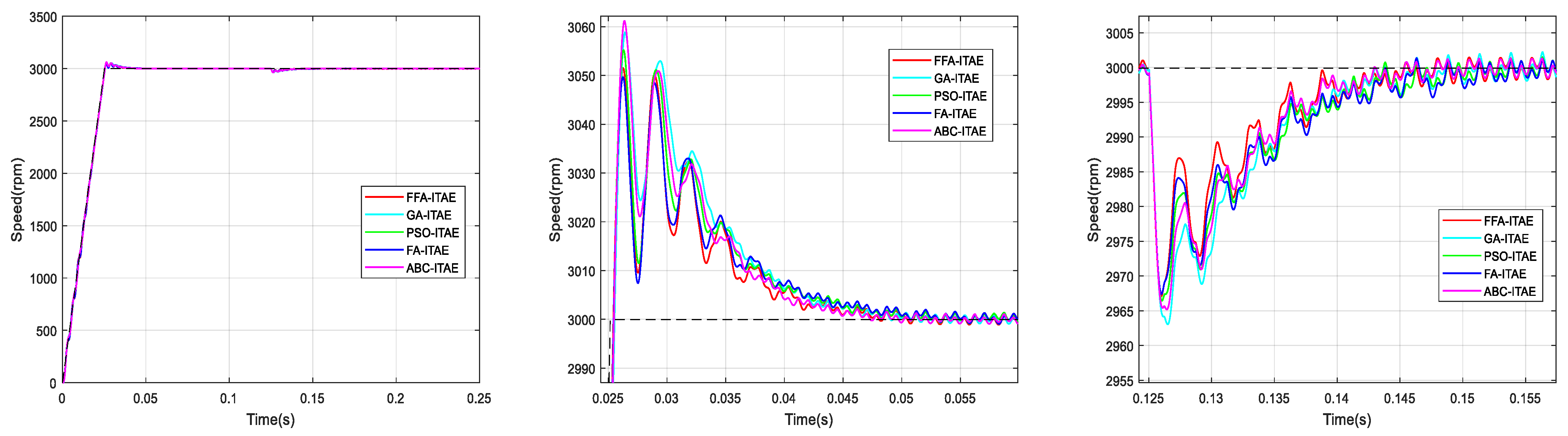
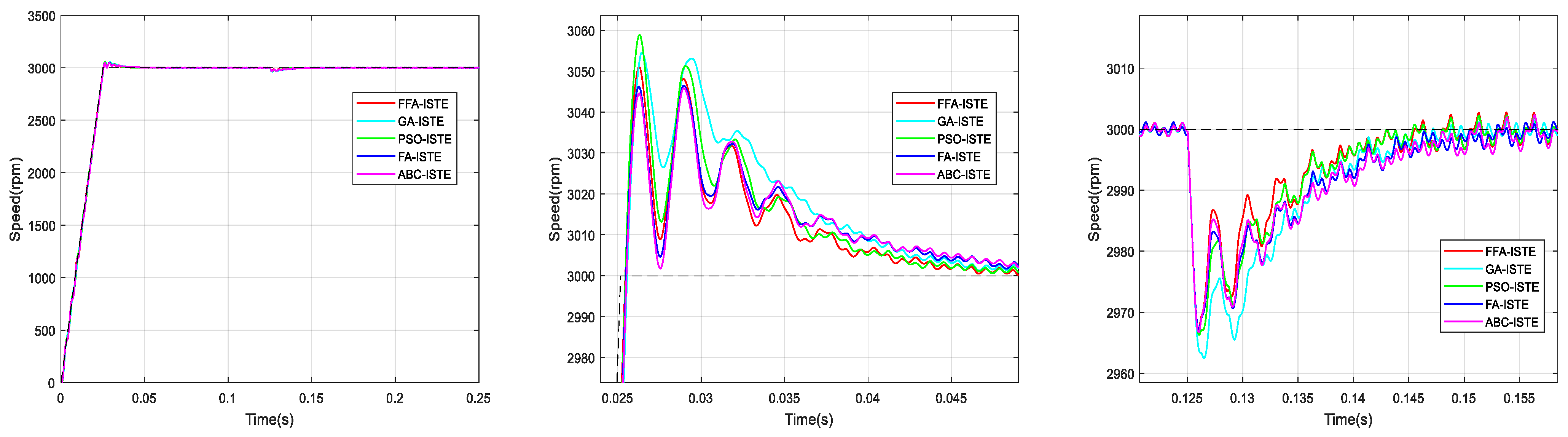
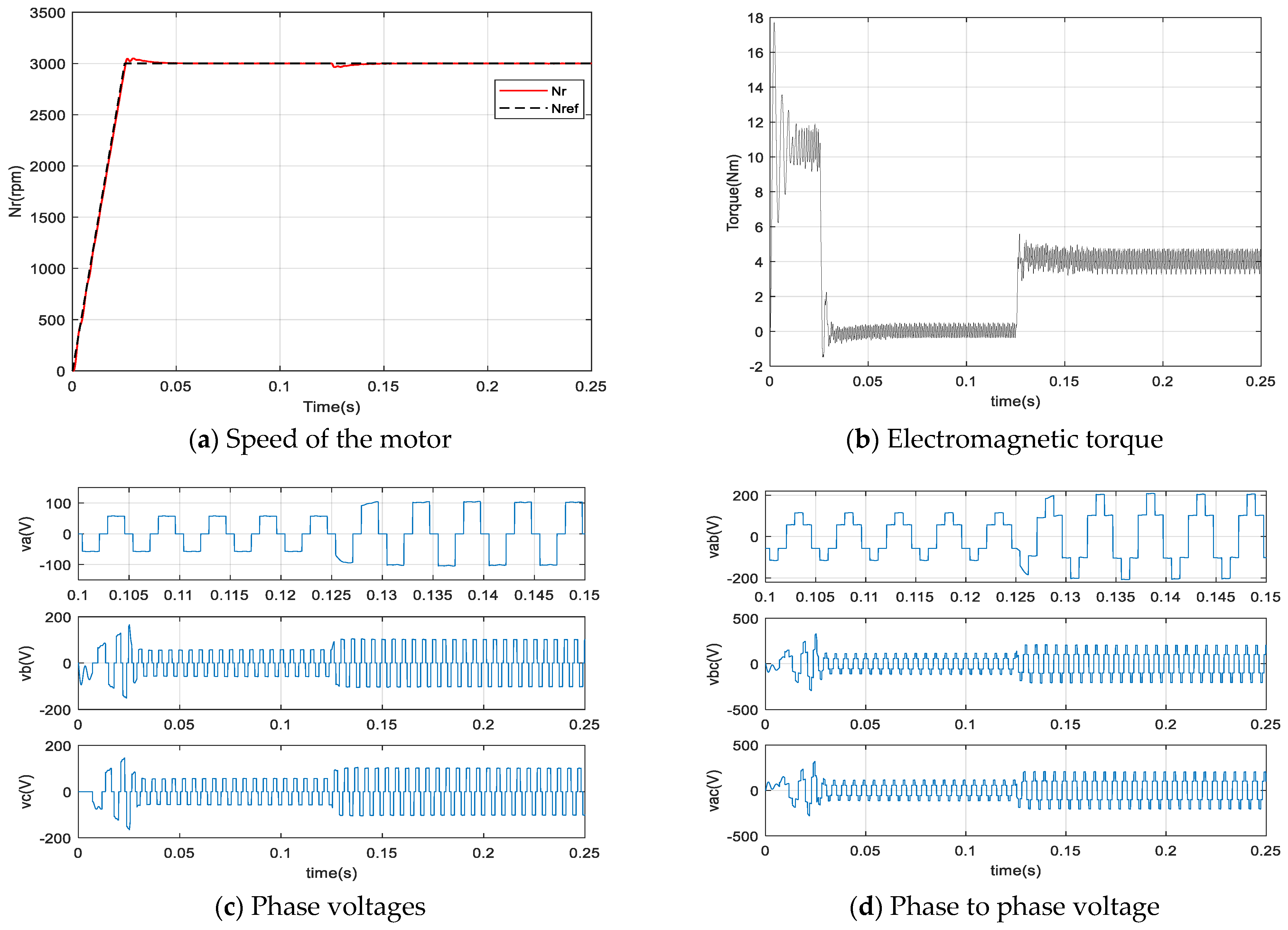
4.6. Simulation Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Symbols used in this paper | |
| ABC | Artificial Bee Colony |
| PSO | Particle Swarm Optimization |
| CS | Cuckoo Search |
| BA | Bat Algorithm |
| GWO | Gray Wolf Optimizer |
| FA | Firefly Algorithm |
| FFA | Fast Firefly Algorithm |
| GA | Genetic Algorithms |
| PI | Proportional Integral |
| PID | Proportional Integral & Derivative |
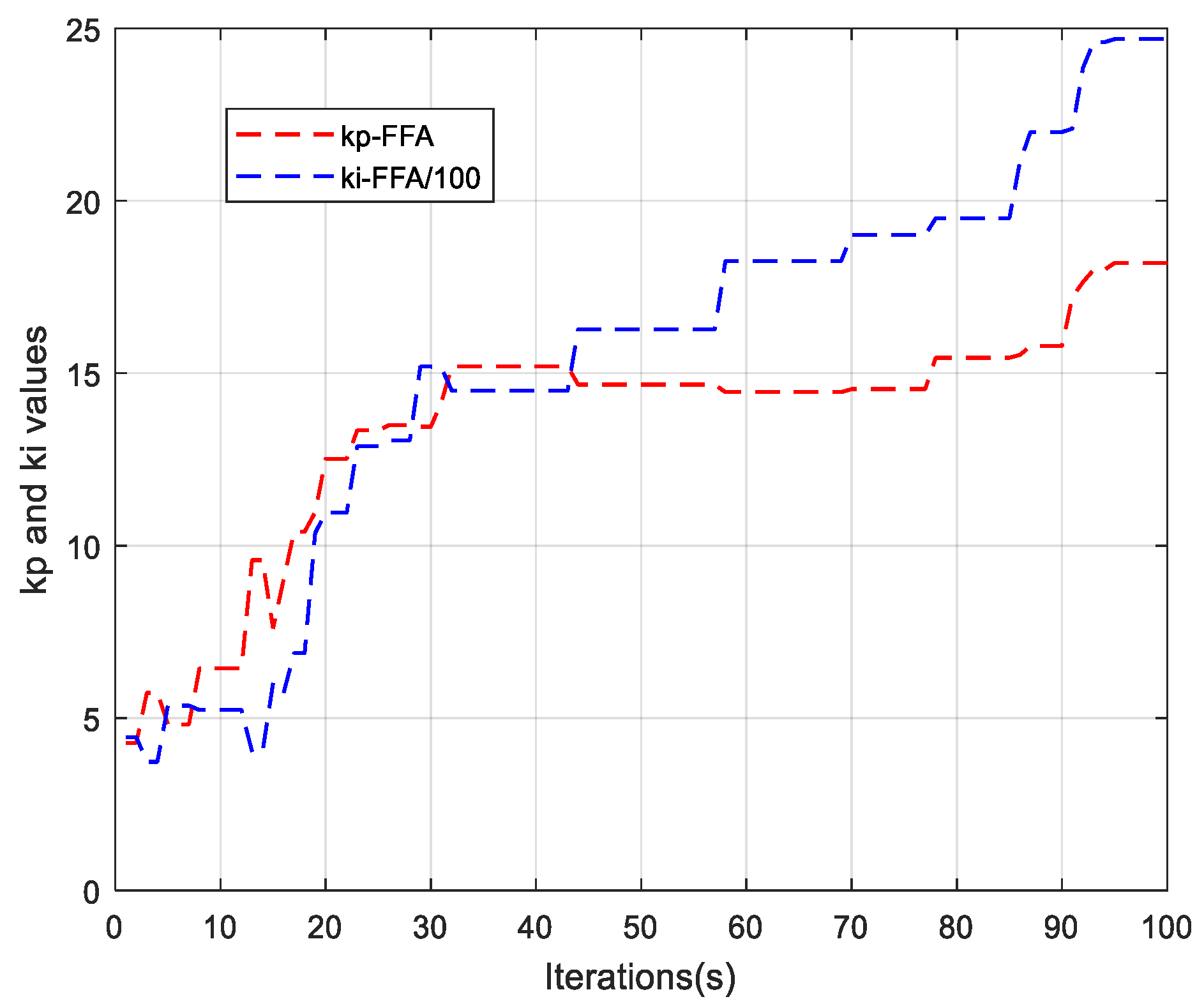
| kp, ki | Proportional and Integral gains of the PI controller |
| IFA | Improved Firefly Algorithm |
| MFA | Modified Firefly Algorithm |
| tFA | Execution time of the original algorithm FA |
| tFFA | Execution time of the proposed algorithm FFA |
| R | Resistance of a stator phase, [Ω] |
| L | Inductance of a stator phase, [H] |
| va, vc, vc | Stator phase voltages, [V] |
| vab, vbc, vca | Stator phase to phase voltages, [V] |
| ia, ib, ic | Stator phase currents, [A] |
| ea, eb, ec | Motor Back-EMFs, [V] |
| Te, TL | Electromagnetic and load torques, [Nm] |
| J | Rotor inertia, [kgm2] |
| kf | Friction constant, [Nms/rad] |
| kt | Torque coefficient, [Nm/A] |
| ωm | Rotor speed, [rad/s] |
| Nr | Rated speed, [rpm] |
| θe | Electric angle of rotor, [rad] |
| θm | Mechanic angle of rotor, [rad] |
| F(θe) | Back-EMF reference function |
| ε(t) | Error input signal |
| y(t) | Output signal |
| Ha, Hb, Hc | Hall Effect Sensors for the three phases |
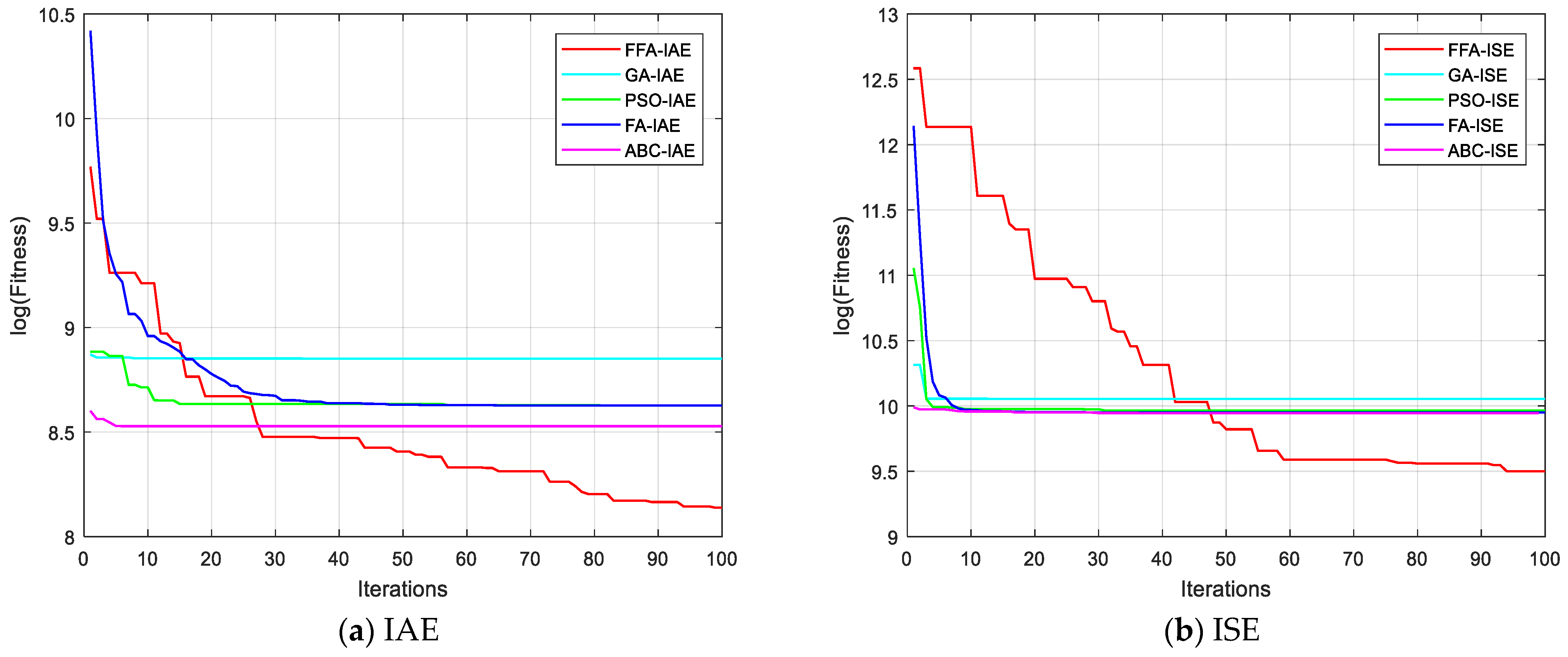
| IAE | Integral Absolute Error |
| ISE | Integral Square Error |
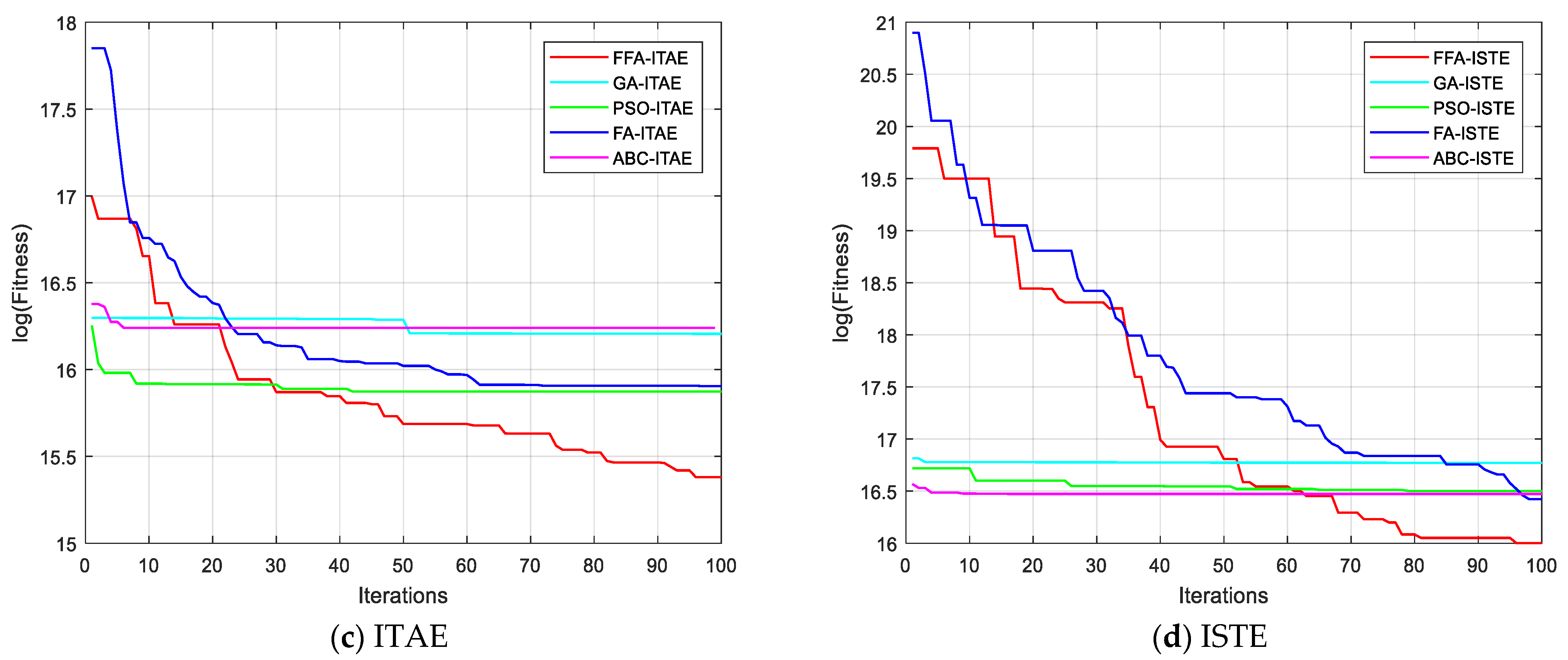
| ITAE | Integral Time Absolute Error |
| ISTE | Integral Square Time Error |
References
- Sarangi, S.K.; Panda, R.; Priyadarshini, S.; Sarangi, A. A New Modified Firefly Algorithm for Function Optimization. In Proceedings of the 2016 International Conference on Electrical, Electronics, and Optimization Techniques (ICEEOT), Chennai, India, 3–5 March 2016; pp. 2944–2949. [Google Scholar]
- Yelghi, A.; Köse, C. A Modified Firefly Algorithm for Global Minimum Optimization. Appl. Soft Comput. 2018, 62, 29–44. [Google Scholar] [CrossRef]
- Ariyaratne, M.K.A.; Fernando, T.G.I.; Weerakoon, S. A Modified Firefly Algorithm to Solve Univariate Nonlinear Equations with Complex Roots. In Proceedings of the 2015 Fifteenth International Conference on Advances in ICT for Emerging Regions (ICTer), Colombo, Sri Lanka, 24–26 August 2015; pp. 160–167. [Google Scholar]
- Ariyaratne, M.K.A.; Fernando, T.G.I.; Weerakoon, S. Solving systems of nonlinear equations using a modified firefly algorithm (MODFA). Swarm Evol. Comput. 2019, 48, 72–92. [Google Scholar] [CrossRef]
- Goldberg, D.E. Genetic Algorithms in Search, Optimization and Machine Learning, 1st ed.; Addison-Wesley Longman Publishing Co., Inc.: Boston, MA, USA, 1989; ISBN 978-0-201-15767-3. [Google Scholar]
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant Colony Optimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef] [Green Version]
- Zeng, Q.; Tan, G. Optimal Design of PID Controller Using Modified Ant Colony System Algorithm. In Proceedings of the Third International Conference on Natural Computation (ICNC 2007), Haikou, China, 24–27 August 2007; Volume 5, pp. 436–440. [Google Scholar]
- Karaboga, D.; Akay, B.; Ozturk, C. Artificial Bee Colony (ABC) Optimization Algorithm for Training Feed-Forward Neural Networks. In Proceedings of the Modeling Decisions for Artificial Intelligence, Haikou, China, 24–27 August 2007; Torra, V., Narukawa, Y., Yoshida, Y., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 318–329. [Google Scholar]
- Singh, K.; Sundar, S. Artifical Bee Colony Algorithm Using Problem-Specific Neighborhood Strategies for the Tree t-Spanner Problem. Appl. Soft Comput. 2018, 62, 110–118. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Nema, S.; Padhy, P.K. PI-PD Controller for Stable and Unstable Processes. Int. J. Syst. Control Commun. 2013, 5, 156–165. [Google Scholar] [CrossRef]
- Nangru, D.; Bairwa, D.K.; Singh, K.; Nema, S.; Padhy, P.K. Modified PSO Based PID Controller for Stable Processes. In Proceedings of the 2013 International Conference on Control, Automation, Robotics and Embedded Systems (CARE), Jabalpur, India, 16–18 December 2013; pp. 1–5. [Google Scholar]
- Yang, X.-S.; Deb, S. Cuckoo Search via Lévy Flights. In Proceedings of the 2009 World Congress on Nature Biologically Inspired Computing (NaBIC), Coimbatore, India, 9–11 December 2009; pp. 210–214. [Google Scholar]
- Yang, X.-S.; Deb, S. Engineering Optimisation by Cuckoo Search. Int. J. Math. Model. Numer. Optim. 2010, 1, 330–343. [Google Scholar] [CrossRef]
- Yang, X.; He, X. Bat Algorithm: Literature Review and Applications. Int. J. Bio-Inspired Comput. 2013, 5, 141–149. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.-S. A New Metaheuristic Bat-Inspired Algorithm. In Nature Inspired Cooperative Strategies for Optimization (NICSO 2010); González, J.R., Pelta, D.A., Cruz, C., Terrazas, G., Krasnogor, N., Eds.; Studies in Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2010; pp. 65–74. ISBN 978-3-642-12538-6. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Pallav, D.; Santanu, K.N. Grey Wolf Optimizer Based PID Controller for Speed Control of BLDC Motor. J. Electr. Eng. Technol. 2021, 16, 955–961. [Google Scholar] [CrossRef]
- Yang, X.-S. Firefly Algorithms for Multimodal Optimization. In Proceedings of the Stochastic Algorithms: Foundations and Applications; 5th International Symposium, SAGA 2009, Sapporo, Japan, 26–28 October, 2009; pp. 169–178. [Google Scholar]
- Yang, X.-S. Nature-Inspired Metaheuristic Algorithms; Luniver Press: Beckington, UK, 2010; ISBN-13: 978-1-905986-28-6. [Google Scholar]
- Bazi, S.; Benzid, R.; Said, M.S.N. Optimum PI Controller Design in PMSM Using Firefly Algorithm and Genetic Algorithm. In Proceedings of the 2017 6th International Conference on Systems and Control (ICSC), Batna, Algeria, 7–9 May 2017; pp. 85–89. [Google Scholar]
- Pradhan, P.C.; Sahu, R.K.; Panda, S. Firefly Algorithm Optimized Fuzzy PID Controller for AGC of Multi-Area Multi-Source Power Systems with UPFC and SMES. Eng. Sci. Technol. Int. J. 2016, 19, 338–354. [Google Scholar] [CrossRef] [Green Version]
- Jinran, W.; You-Gan, W.; Kevin, B.; Yu-Chu, T.; Brodie, L.; Zhe, D. An improved firefly algorithm for global continuous optimization problems. Expert Syst. Appl. 2020, 149, 113340. [Google Scholar] [CrossRef]
- Boris, J.; Paolo, L.; Guido, M. Control of double-loop permanent magnet synchronous motor drives by optimized fractional and distributed-order PID controllers. Eur. J. Control 2021, 58, 232–244. [Google Scholar] [CrossRef]
- Mat Hussin, A.T.; Intan Zaurah, M.D.; Pakharuddin, M.S.; Hanim, M.Y.; Mohd Ibthisham, A.; Nik Mohd, R.S.; Muhamad, S.H. Vibration control of semi-active suspension system using PID controller with advanced firefly algorithm and particle swarm optimization. J. Ambient. Intell. Humaniz. Comput. 2021, 12, 1119–1137. [Google Scholar]
- He, S.; Chen, Z.; Gao, X. Parameter Solving of DC Servo Motor PID Controller Based on Improved Firefly Algorithm. In Proceedings of the 2018 3rd International Conference on Robotics and Automation Engineering (ICRAE), Guangzhou, China, 17–19 November 2018; pp. 136–140. [Google Scholar]
- Rosy, P.; Santosh, K.M.; Jatin, K.P.; Bibhuti, B.P. Optimal fractional order PID controller design using Ant Lion Optimizer. Ain Shams Eng. J. 2020, 11, 281–291. [Google Scholar] [CrossRef]
- Devarapalli, R.; Naga Lakshmi, N.J.; Prasad, U. Application of a Novel Political Optimization in Optimal Parameter Design of PI Controller for the BLDC Motor Speed Control. In Proceedings of the 2020 International Conference on Emerging Frontiers in Electrical and Electronic Technologies (ICEFEET), Patna, India, 10–11 July 2020; pp. 1–6. [Google Scholar]
- BARAN, H. Optimal Tuning of Fractional Order PID Controller for DC Motor Speed Control via Chaotic Atom Search Optimization Algorithm. IEEE Access 2019, 7, 38100–38114. [Google Scholar]
- Jagatheesan, K.; Anand, B.; Samanta, S.; Dey, N.; Ashour, A.S.; Balas, V.E. Design of a Proportional-Integral-Derivative Controller for an Automatic Generation Control of Multi-Area Power Thermal Systems Using Firefly Algorithm. IEEE/CAA J. Autom. Sin. 2019, 6, 503–515. [Google Scholar] [CrossRef]
- Chaib, L.; Choucha, A.; Arif, S. Optimal Design and Tuning of Novel Fractional Order PID Power System Stabilizer Using a New Metaheuristic Bat Algorithm. Ain Shams Eng. J. 2017, 8, 113–125. [Google Scholar] [CrossRef] [Green Version]
- Xiaoyan, P.; Mingfei, J.; Lei, H.; Xiang, Y.; Yibin, L. Fuzzy sliding mode control based on longitudinal force estimation for electro-mechanical braking systems using BLDC motor. CES Trans. Electr. Mach. Syst. 2018, 2, 142–151. [Google Scholar]
- Walekar, V.R.; Murkute, S.V. Speed Control of BLDC Motor Using PI Fuzzy Approach: A Comparative Study. In Proceedings of the 2018 International Conference on Information, Communication, Engineering and Technology (ICICET), Pune, India, 29–31 August 2018; pp. 1–4. [Google Scholar]
- Ahmed, R.; Paul, Y. Hardware/Software Implementation of Fuzzy-Neural-Network Self-Learning Control Methods for Brushless DC Motor Drives. IEEE Trans. Ind. Appl. 2016, 52, 414–424. [Google Scholar]
- Xiong, S.; Junguo, G.; Jian, C.; Biao, J. Research on Speed Control System of Brushless DC Motor Based on Neural Network. In Proceedings of the 2015 8th International Conference on Intelligent Computation Technology and Automation (ICICTA), Nanchang, China, 14–15 June 2015; pp. 761–764. [Google Scholar]
- Putra, E.H.; Zulfatman, Z.; Effendy, M. Robust Adaptive Sliding Mode Control Design with Genetic Algorithm for Brushless DC Motor. In Proceedings of the International Conference on Electrical Engineering, Computer Science and Informatics (EECSI), Malang, Indonesia, 16–18 October 2018; Volume 5, pp. 330–335, ISBN 978-1-5386-8402-3. [Google Scholar]
- Li, J.; Li, W. On-Line PID Parameters Optimization Control for Wind Power Generation System Based on Genetic Algorithm. IEEE Access 2020, 8, 137094–137100. [Google Scholar] [CrossRef]
- Merugumalla, M.K.; Navuri, P.K. PSO and Firefly Algorithms Based Control of BLDC Motor Drive. In Proceedings of the 2018 2nd International Conference on Inventive Systems and Control (ICISC), Coimbatore, India, 19–20 January 2018; pp. 994–999. [Google Scholar]
- Ho, S.L.; Yang, S.; Ni, G.; Lo, E.W.C.; Wong, H.C. A Particle Swarm Optimization-Based Method for Multiobjective Design Optimizations. IEEE Trans. Magn. 2005, 41, 1756–1759. [Google Scholar] [CrossRef] [Green Version]
- Fateen, S.-E.K.; Bonilla-Petriciolet, A. Intelligent firefly algorithm for global optimization. In Cuckoo Search and Firefly algorithm; Springer: Berlin/Heidelberg, Germany, 2014; pp. 315–330. [Google Scholar]
- Ardeh, M.A. Benchmark Functions. Available online: Benchmarkfcns.xyz/fcns.html (accessed on 26 May 2021).
- Jamil, M.; Yang, X.-S. A Literature Survey of Benchmark Functions for Global Optimisation Problems. Int. J. Math. Model. Numer. Optim. 2013, 4, 150–194. [Google Scholar] [CrossRef] [Green Version]
- Permanent Magnet Brushless DC Motor Drives and Controls|Wiley. Available online: https://www.wiley.com/en-ar/Permanent+Magnet+Brushless+DC+Motor+Drives+and+Controls-p-9781118188330 (accessed on 27 May 2021).
- Mondal, S.; Mitra, A.; Chattopadhyay, M. Mathematical Modeling and Simulation of Brushless DC Motor with Ideal Back EMF for a Precision Speed Control. In Proceedings of the 2015 IEEE International Conference on Electrical, Computer and Communication Technologies (ICECCT), Coimbatore, India, 5–7 March 2015; pp. 1–5. [Google Scholar]
- Prasad, G.; Ramya, N.S.; Prasad, P.V.N.; Das, G.T.R. Modeling and Simulation Analysis of the Brushless DC Motor by Using MATLAB. Int. J. Innov. Technol. Explor. Eng. (IJITEE) 2012, 1, 27–31. [Google Scholar]
- Kumar, D.; Gupta, R.A.; Gupta, N. Modeling and Simulation of Four Switch Three-Phase BLDC Motor Using Anti-Windup PI Controller. In Proceedings of the 2017 Innovations in Power and Advanced Computing Technologies (i-PACT), Vellore, India, 21–22 April 2017; pp. 1–6. [Google Scholar]
- Jaromír, J.; Miloslav, Č. Position Measurement with Hall Effect Sensors. Am. J. Mech. Eng. 2013, 1, 231–235. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Name | Expression | Range | f(x*) |
|---|---|---|---|---|
| F1 | Schaffer N.1 | [−100,100] | 0 for x* = (0,0) | |
| F2 | Matyas | [−10,10] | 0 for x* = (0,0) | |
| F3 | BohachevskyN1 | [−100,100] | 0 for x* = (0,0) | |
| F4 | Xin-SheYang N.2 | [−2π,2π] | 0 for x* = (0,……,0) | |
| F5 | Zakharov | [−5,10] | 0 for x* = (0,……,0) | |
| F6 | Ackley | [−32,32] | 0 for x* = (0,……,0) | |
| F7 | Powell | [−1,1] | 0 for x* = (0,……,0) | |
| F8 | Rastrigin | [−5.12,5.12] | 0 for x* = (0,……,0) | |
| F9 | Schewel223 | [−10,10] | 0 for x* = (0,0) | |
| F10 | Alpinen1 | [0,10] | 0 for x* = (0,0) | |
| F11 | Grienwak | [−600,600] | 0 for x* = (0,……,0) | |
| F12 | Brown | [−1,4] | 0 for x* = (0,……,0) | |
| F13 | Sphere | [−5.12,5.12] | 0 for x* = (0,……,0) | |
| F14 | Salomon | [−100,100] | 0 for x* = (0,……,0) | |
| F15 | Three Hump Camel | [−5,5] | 0 for x* = (0,……,0) |
| Symbol | Quantity | Value |
|---|---|---|
| N | Population size | 30 |
| Iter | Number of iterations | 1000 |
| α | Randomization parameter | [0,1] |
| β0 | Attractiveness | 1 |
| γ | Absorption coefficient | [0,1] |
| Function | Algorithm | Dim. D | Theoretical Optimal Value | Minimum Value | Computational Time (s) | Average Speed up Ratio of 10 Runs | Std | Mean |
|---|---|---|---|---|---|---|---|---|
| F1 | FA | 2 | 0 | 1.6542 × 10−13 | 86.483887 | 12.0295:1 | 2.9426 × 10−12 | 3.4053 × 10−12 |
| FFA | 2.2204 × 10−16 | 7.189327 | 1.1466 × 10−16 | 3.5527 × 10−16 | ||||
| F2 | FA | 2 | 0 | 5.8618 × 10−15 | 110.617901 | 11.7869:1 | 2.2829 × 10−15 | 4.2810 × 10−15 |
| FFA | 1.1794 × 10−22 | 9.384792 | 5.2167 × 10−22 | 3.4229 × 10−22 | ||||
| F3 | FA | 2 | 0 | 8.0766 × 10−10 | 114.399397 | 11.9121:1 | 2.2452 × 10−9 | 2.2950 × 10−9 |
| FFA | 1.1102 × 10−16 | 9.603642 | 1.0320 × 10−15 | 1.4211 × 10−15 | ||||
| F4 | FA | 10 | 0 | 5.6623 × 10−4 | 165.318332 | 13.0661:1 | 1.3542 × 10−8 | 5.6625 × 10−8 |
| FFA | 3.4134 × 10−11 | 12.652510 | 2.4298 × 10−11 | 3.6237 × 10−11 | ||||
| F5 | FA | 10 | 0 | 1.9635 × 10−7 | 102.111224 | 12.0521:1 | 1.1191 × 10−7 | 3.1165 × 10−7 |
| FFA | 5.0686 × 10−22 | 8.472478 | 9.9126 × 10−38 | 5.0686 × 10−22 | ||||
| F6 | FA | 10 | 0 | 0.0252 | 174.645121 | 12.6941:1 | 0.0061 | 0.0357 |
| FFA | 7.5286 × 10−11 | 13.758015 | 5.5179 × 10−11 | 8.6060 × 10−11 | ||||
| F7 | FA | 20 | 0 | 5.4225 × 10−8 | 254.090816 | 11.9330:1 | 4.4293 × 10−8 | 6.0622 × 10−8 |
| FFA | 6.0701 × 10−27 | 21.293091 | 1.6065 × 10−25 | 2.1326 × 10−25 | ||||
| F8 | FA | 20 | 0 | 1.7397 × 10−9 | 86.135286 | 11.9768:1 | 2.2366 × 10−9 | 2.5533 × 10−9 |
| FFA | 7.1054 × 10−15 | 7.191834 | 1.1235 × 10−14 | 1.0658 × 10−14 | ||||
| F9 | FA | 20 | 0 | 5.4774 × 10−26 | 199.923385 | 12.2129:1 | 6.8916 × 10−26 | 7.4821 × 10−26 |
| FFA | 2.9153 × 10−84 | 16.369803 | 4.8193 × 10−100 | 2.9153 × 10−84 | ||||
| F10 | FA | 30 | 0 | 1.7988 × 10−4 | 139.507606 | 12.2676:1 | 1.5871 × 10−5 | 2.1766 × 10−4 |
| FFA | 5.6687 × 10−9 | 11.372018 | 3.6465 × 10−10 | 6.0921 × 10−9 | ||||
| F11 | FA | 30 | 0 | 8.0295 × 10−6 | 130.429223 | 17.9004:1 | 2.0834 × 10−7 | 1.2770 × 10−6 |
| FFA | 3.3304 × 10−16 | 7.286405 | 2.0572 × 10−16 | 6.5503 × 10−16 | ||||
| F12 | FA | 30 | 0 | 2.0832 × 10−4 | 312.021582 | 16.2503:1 | 2.1256 × 10−5 | 1.7312 × 10−4 |
| FFA | 3.5141 × 10−16 | 19.200945 | 2.1964 × 10−17 | 3.5897 × 10−16 |
| Function | Algorithm | Dim. D | Theoretical Optimal Value | Minimum Value | Std | Mean | Computational Time of 10 Runs (Seconds) | Iterations |
|---|---|---|---|---|---|---|---|---|
| F13 | FFA | 50 | 0 | 3.7950 × 10−16 | 2.9222 × 10−17 | 3.9330 × 10−16 | 11.743543 | 1000 |
| 100 | 8.9766 × 10−16 | 5.3287 × 10−17 | 9.2937 × 10−16 | 12.630883 | ||||
| 150 | 1.5083 × 10−15 | 4.4389 × 10−17 | 1.5223 × 10−15 | 13.399011 | ||||
| 200 | 2.1964 × 10−15 | 8.7426 × 10−20 | 2.1966 × 10−15 | 14.696007 | ||||
| F14 | FFA | 50 | 0 | 1.9615 × 10−9 | 5.8730 × 10−11 | 2.0092 × 10−9 | 12.619130 | 1000 |
| 100 | 3.0618 × 10−9 | 6.2137 × 10−11 | 3.1208 × 10−9 | 13.483702 | ||||
| 150 | 3.9315 × 10−9 | 1.7846 × 10−11 | 3.9107 × 10−9 | 14.451983 | ||||
| 200 | 4.6921 × 10−9 | 1.1344 × 10−11 | 4.6959 × 10−9 | 15.718014 | ||||
| F15 | FFA | 50 | 0 | 1.1834 × 10−21 | 7.7571 × 10−22 | 2.0847 × 10−21 | 8.676127 | 1000 |
| 100 | 1.3134 × 10−21 | 9.5957 × 10−22 | 1.7686 × 10−21 | 9.238064 | ||||
| 150 | 1.6926 × 10−21 | 4.3289 × 10−21 | 3.9281 × 10−21 | 10.033184 | ||||
| 200 | 2.8146 × 10−21 | 3.7922 × 10−21 | 5.1335 × 10−21 | 11.103394 |
| Electrical Angle (°) | Sequence Number | Hall Sensors | Phase Current | Switch Closed | |||||
|---|---|---|---|---|---|---|---|---|---|
| Ha | Hb | Hc | ia | ib | ic | ||||
| 0–60 | 1 | 1 | 0 | 1 | + | − | off | S1 | S4 |
| 60–120 | 2 | 1 | 0 | 0 | + | off | − | S1 | S6 |
| 120–180 | 3 | 1 | 1 | 0 | off | + | − | S3 | S6 |
| 180–240 | 4 | 0 | 1 | 0 | − | + | off | S3 | S2 |
| 240–300 | 5 | 0 | 1 | 1 | − | off | + | S5 | S2 |
| 300–360 | 6 | 0 | 0 | 1 | off | − | + | S5 | S4 |
| Parameters | Values |
|---|---|
| Number of pole | 4 |
| Nominal voltage vd | 114 V |
| Stator resistance R | 1.2 Ω |
| Stator inductance L | 1.2 mH |
| Torque coefficient kt | 0.3262 Nm/A |
| Back-EMF coefficient ke | 0.3262 Vs/rad |
| Rotor inertia J | 0.00085 kgm2 |
| Rated speed Nr | 3000 rpm |
| Friction coefficient kf | 0.0001 Nms/rad |
| Algorithm | Parameters/Criterion | IAE | ISE | ITAE | ITSE |
|---|---|---|---|---|---|
| FFA | kp_FFA | 18.19 | 24.5 | 24.56 | 24.06 |
| ki_FFA | 4468.8 | 4435.2 | 4132.2 | 4002.32 | |
| FA | kp_FA | 26.54 | 20.21 | 24.08 | 24.08 |
| ki_FA | 2207.2 | 3615.8 | 3451.2 | 2996.2 | |
| GA | kp_GA | 19.45 | 23.14 | 19.11 | 24.76 |
| ki_GA | 1685.1 | 2474.5 | 3220.2 | 2896.1 | |
| PSO | kp_PSO | 25.8 | 17.68 | 22.06 | 21.72 |
| ki_PSO | 2081.5 | 3440.8 | 3451.2 | 3601.66 | |
| ABC | kp_ABC | 24.51 | 19.53 | 20.16 | 24.17 |
| ki_ABC | 3140.9 | 3796.6 | 3650.8 | 2901.12 |
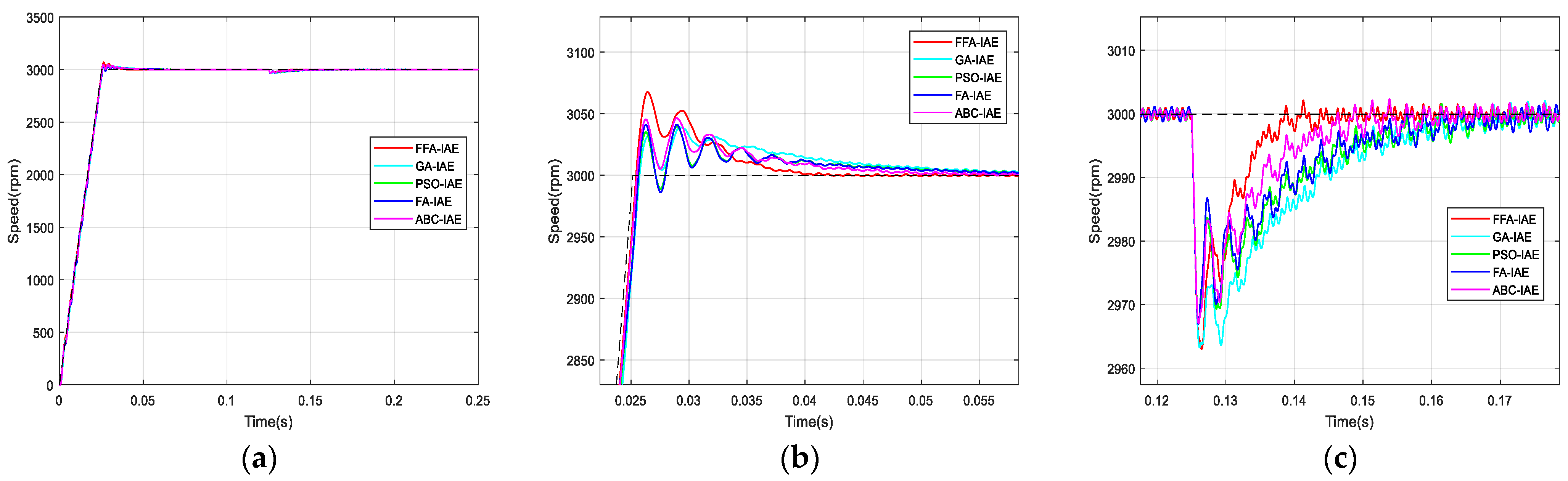
| Controller | Criterion | Rise Time(s) | Settling Time(s) | Peak | Peak Time(s) | % Overshoot |
|---|---|---|---|---|---|---|
| FFA_PI | IAE | 0.0217 | 0.413 | 3067.3 | 0.0264 | 2.2497 |
| FA_PI | 0.0219 | 0.0722 | 3041.1 | 0.0289 | 1.3708 | |
| GA_PI | 0.0219 | 0.0731 | 3038.8 | 0.0293 | 1.2922 | |
| PSO_PI | 0.0219 | 0.0730 | 3039.9 | 0.0289 | 1.3299 | |
| ABC_PI | 0.0219 | 0.0579 | 3046.5 | 0.0289 | 1.5486 | |
| FFA_PI | ISE | 0.0217 | 0.0478 | 3058.2 | 0.0263 | 1.7516 |
| FA_PI | 0.0218 | 0.0488 | 3060.7 | 0.0264 | 2.0226 | |
| GA_PI | 0.0219 | 0.0646 | 3044.3 | 0.0290 | 1.4769 | |
| PSO_PI | 0.0217 | 0.0488 | 3062.4 | 0.0265 | 2.0804 | |
| ABC_PI | 0.0217 | 0.0488 | 3062.1 | 0.0264 | 2.0713 | |
| FFA_PI | ITAE | 0.0218 | 0.0488 | 3051.5 | 0.0263 | 1.7163 |
| FA_PI | 0.0219 | 0.0546 | 3049.7 | 0.0263 | 1.6554 | |
| GA_PI | 0.0218 | 0.0488 | 3058.9 | 0.0264 | 1.9620 | |
| PSO_PI | 0.0219 | 0.0612 | 3055.2 | 0.0263 | 1.8398 | |
| ABC_PI | 0.0218 | 0.0488 | 3061.2 | 0.0264 | 2.0393 | |
| FFA_PI | ISTE | 0.0218 | 0.0513 | 3051.0 | 0.0263 | 1.7013 |
| FA_PI | 0.0219 | 0.0613 | 3046.4 | 0.0290 | 1.5480 | |
| GA_PI | 0.0219 | 0.0613 | 3046.4 | 0.0290 | 1.5473 | |
| PSO_PI | 0.0218 | 0.0513 | 3058.9 | 0.0263 | 1.9625 | |
| ABC_PI | 0.0219 | 0.0596 | 3045.8 | 0.0290 | 1.5269 |
| Simulation Time (s) | |||||
|---|---|---|---|---|---|
| Iteration | FFA | FA | GA | PSO | ABC |
| 50 | 108.53 | 284.15 | 119.55 | 242.23 | 135.95 |
| 100 | 216.57 | 570.06 | 239.77 | 486.82 | 268.20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bazi, S.; Benzid, R.; Bazi, Y.; Rahhal, M.M.A. A Fast Firefly Algorithm for Function Optimization: Application to the Control of BLDC Motor. Sensors 2021, 21, 5267. https://doi.org/10.3390/s21165267
Bazi S, Benzid R, Bazi Y, Rahhal MMA. A Fast Firefly Algorithm for Function Optimization: Application to the Control of BLDC Motor. Sensors. 2021; 21(16):5267. https://doi.org/10.3390/s21165267
Chicago/Turabian StyleBazi, Smail, Redha Benzid, Yakoub Bazi, and Mohamd Mahmoud Al Rahhal. 2021. "A Fast Firefly Algorithm for Function Optimization: Application to the Control of BLDC Motor" Sensors 21, no. 16: 5267. https://doi.org/10.3390/s21165267
APA StyleBazi, S., Benzid, R., Bazi, Y., & Rahhal, M. M. A. (2021). A Fast Firefly Algorithm for Function Optimization: Application to the Control of BLDC Motor. Sensors, 21(16), 5267. https://doi.org/10.3390/s21165267