
Estimating the Characteristic Curve of a Directional Control Valve in a Combined Multibody and Hydraulic System Using an Augmented Discrete Extended Kalman Filter

 , ,
, , 
Abstract
:1. Introduction
2. Parameter Estimation Methodology
2.1. Multibody Dynamic Formulations
2.1.1. Double-Step Semi-Recursive Formulation
2.1.2. Hydraulic Lumped Fluid Theory
2.1.3. Monolithic Approach: Coupling MBS and Hydraulic Dynamic Systems
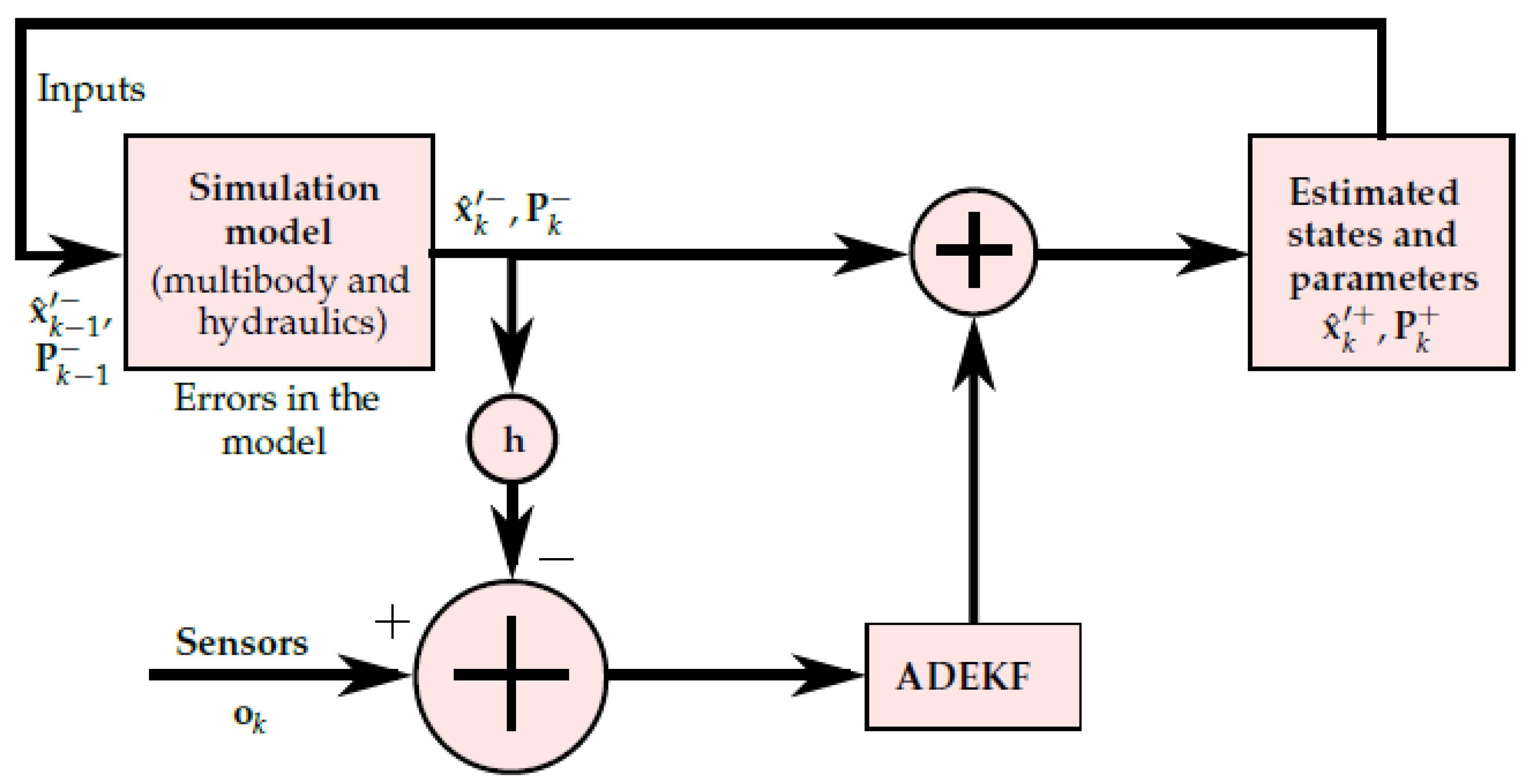
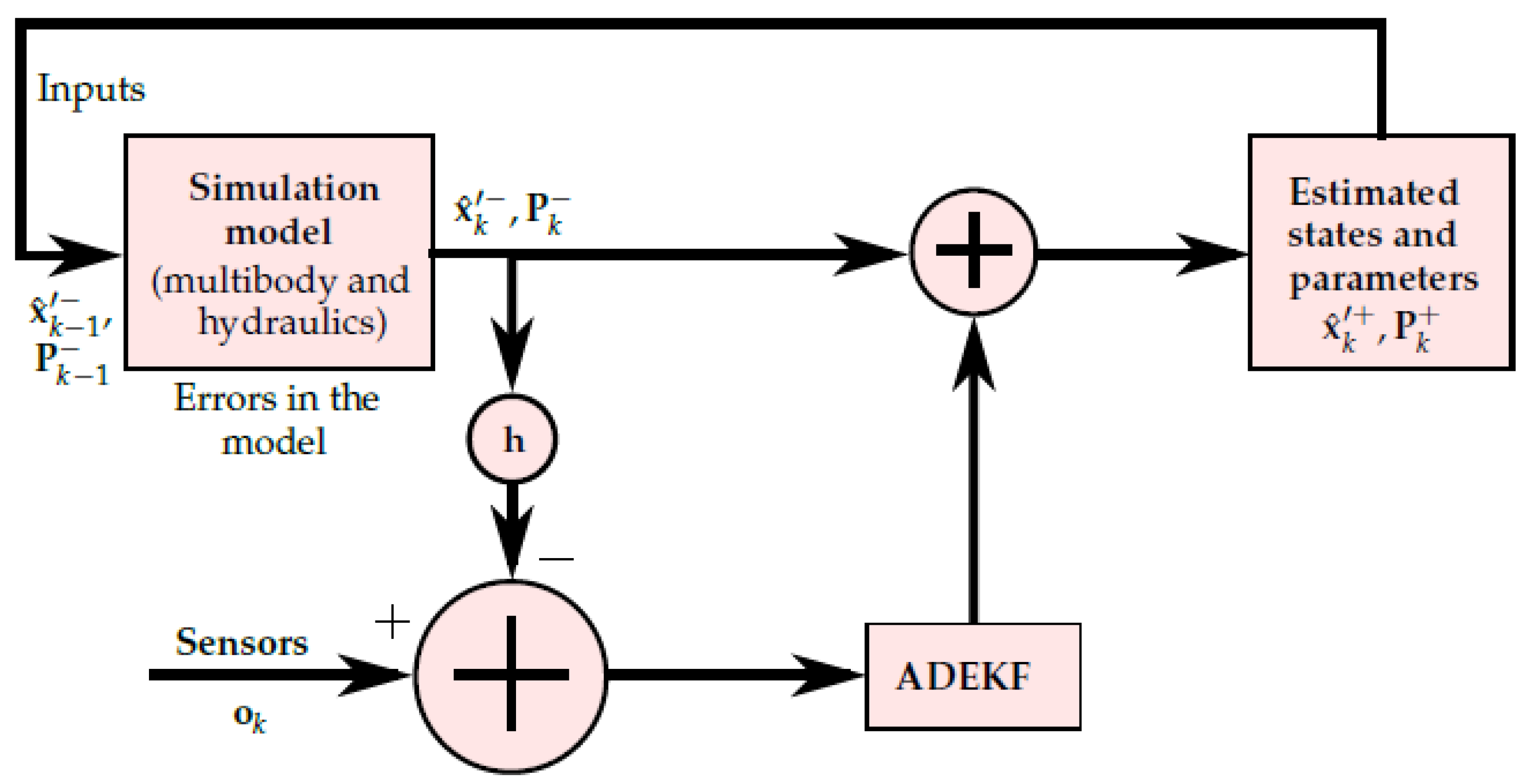
2.2. Estimation Algorithm: ADEKF with a Curve-Fitting Method
Covariance Matrices of Process and Measurement Noises
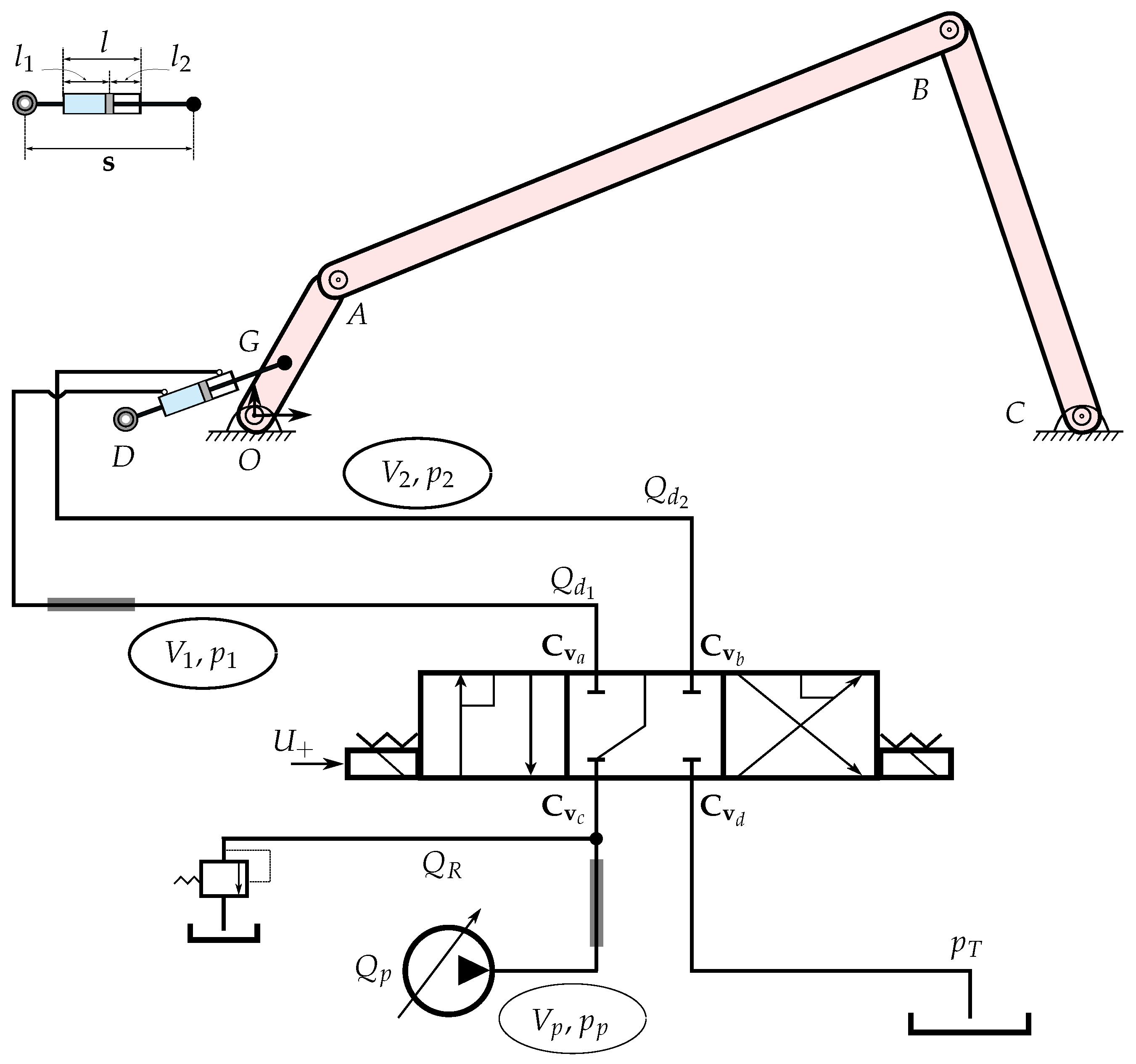
3. Case Example: Hydraulically Actuated System
3.1. Dynamic Model of the System
3.1.1. Real and Estimation Models
3.1.2. Sensor Measurements
3.2. Parameter Estimation Algorithm

4. Results and Discussion
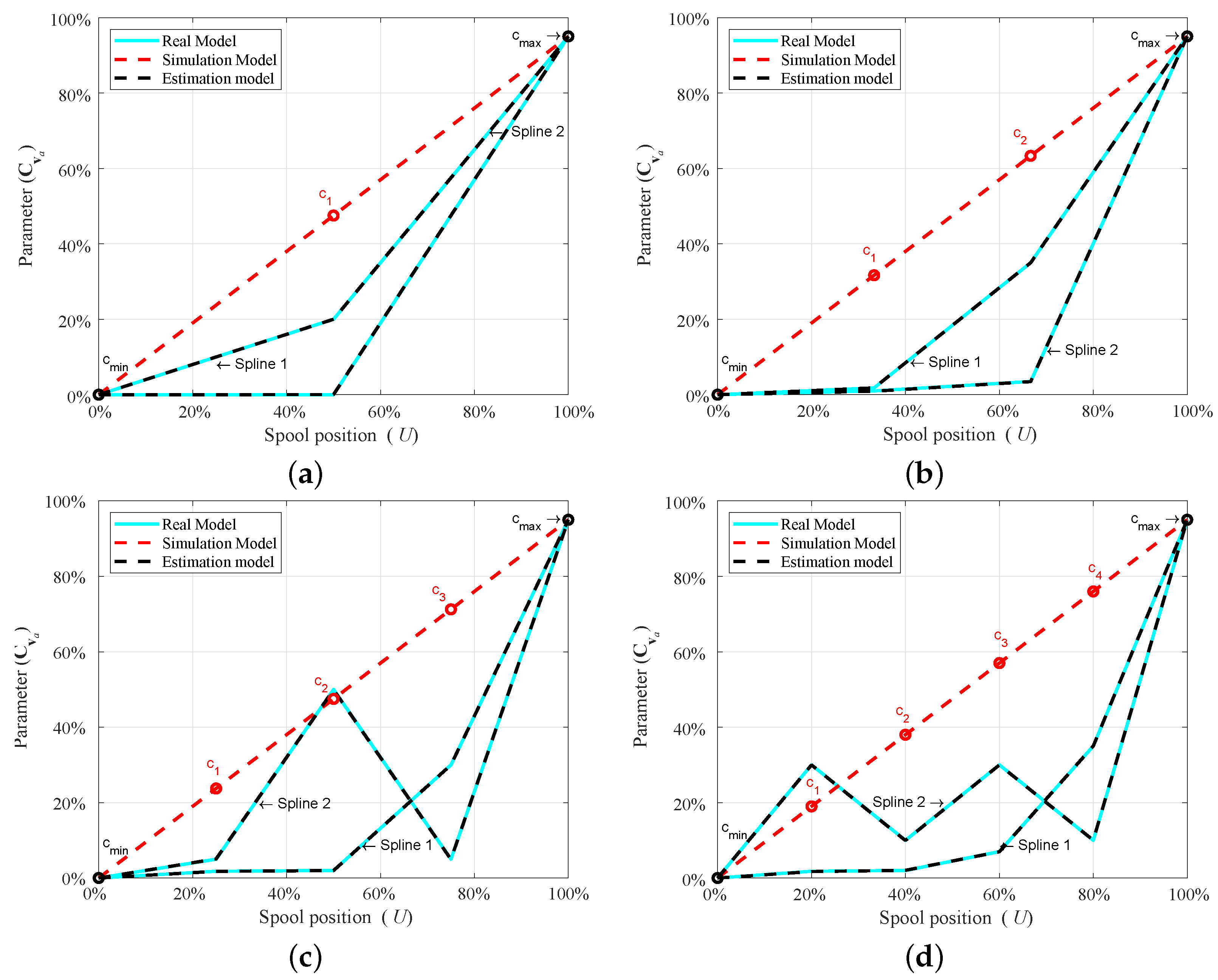
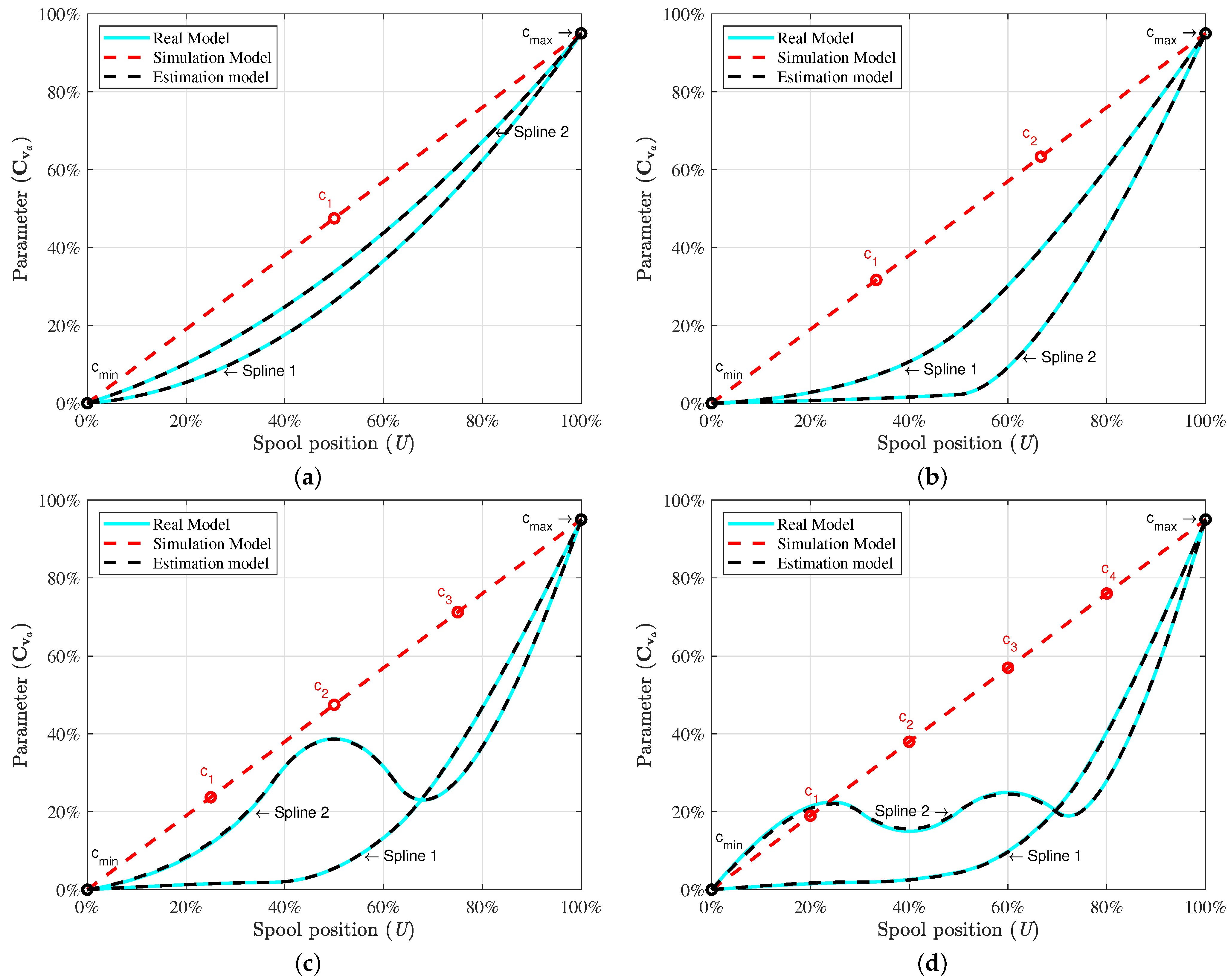
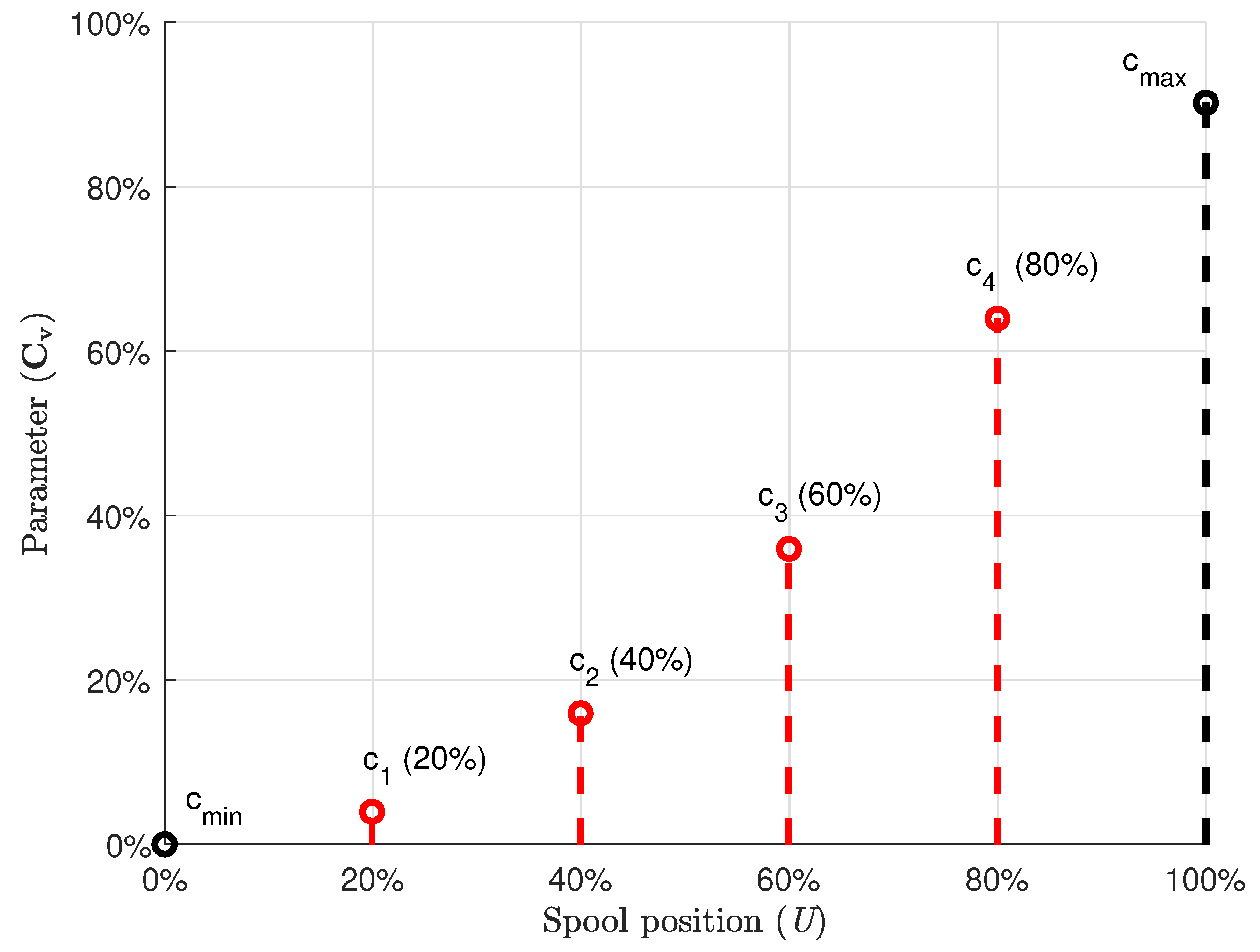
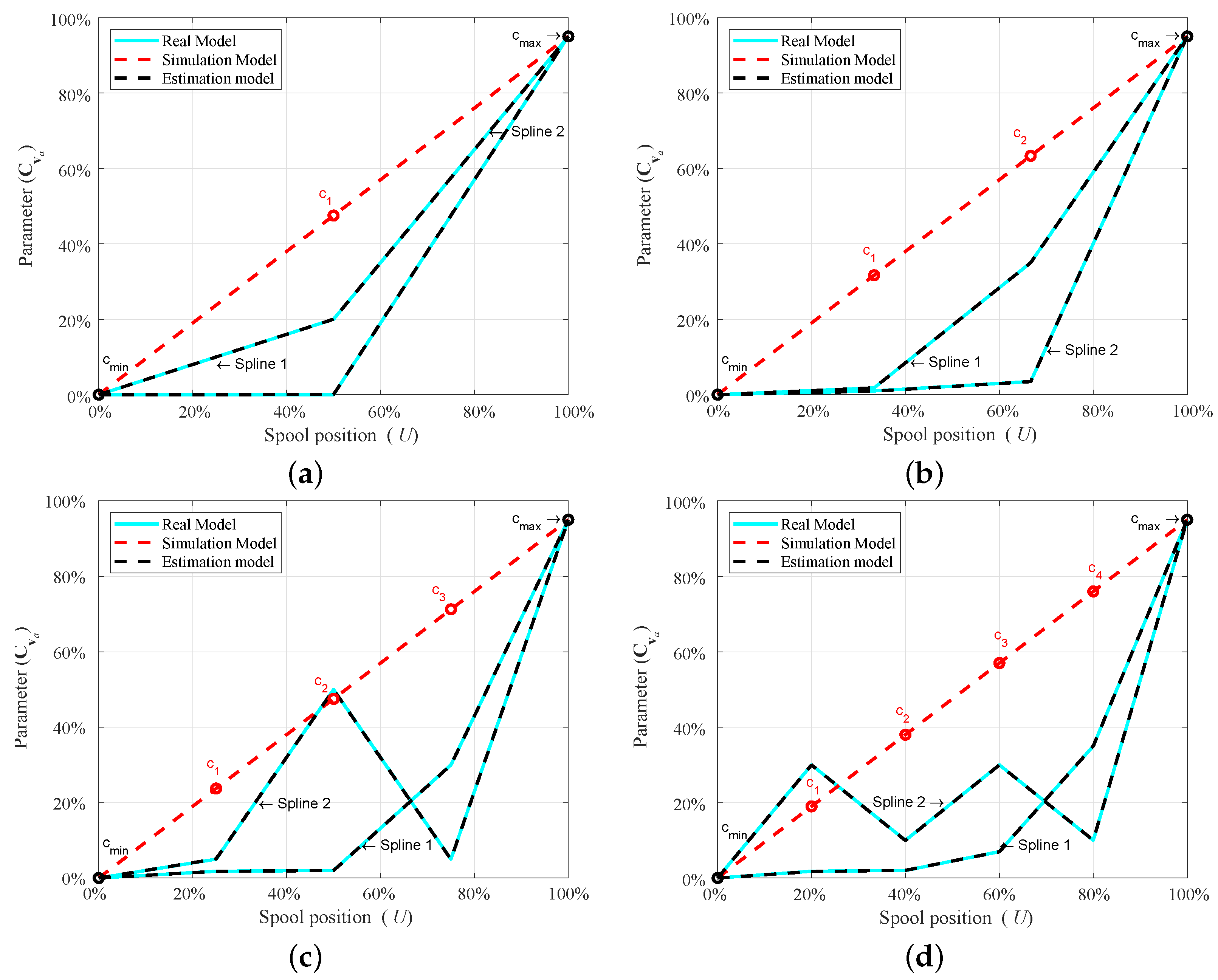
4.1. Estimating the Characteristic Curve of the Valve
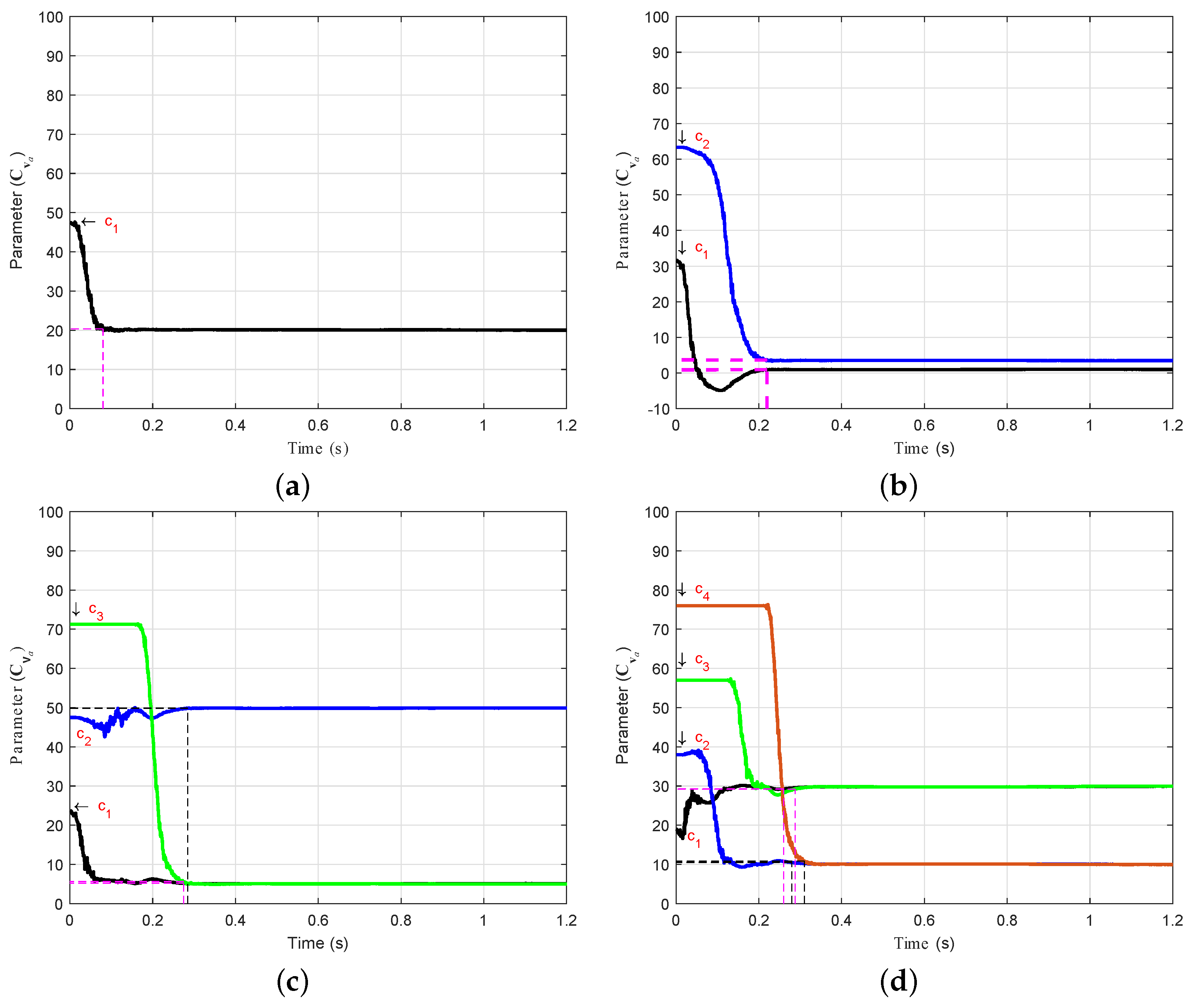
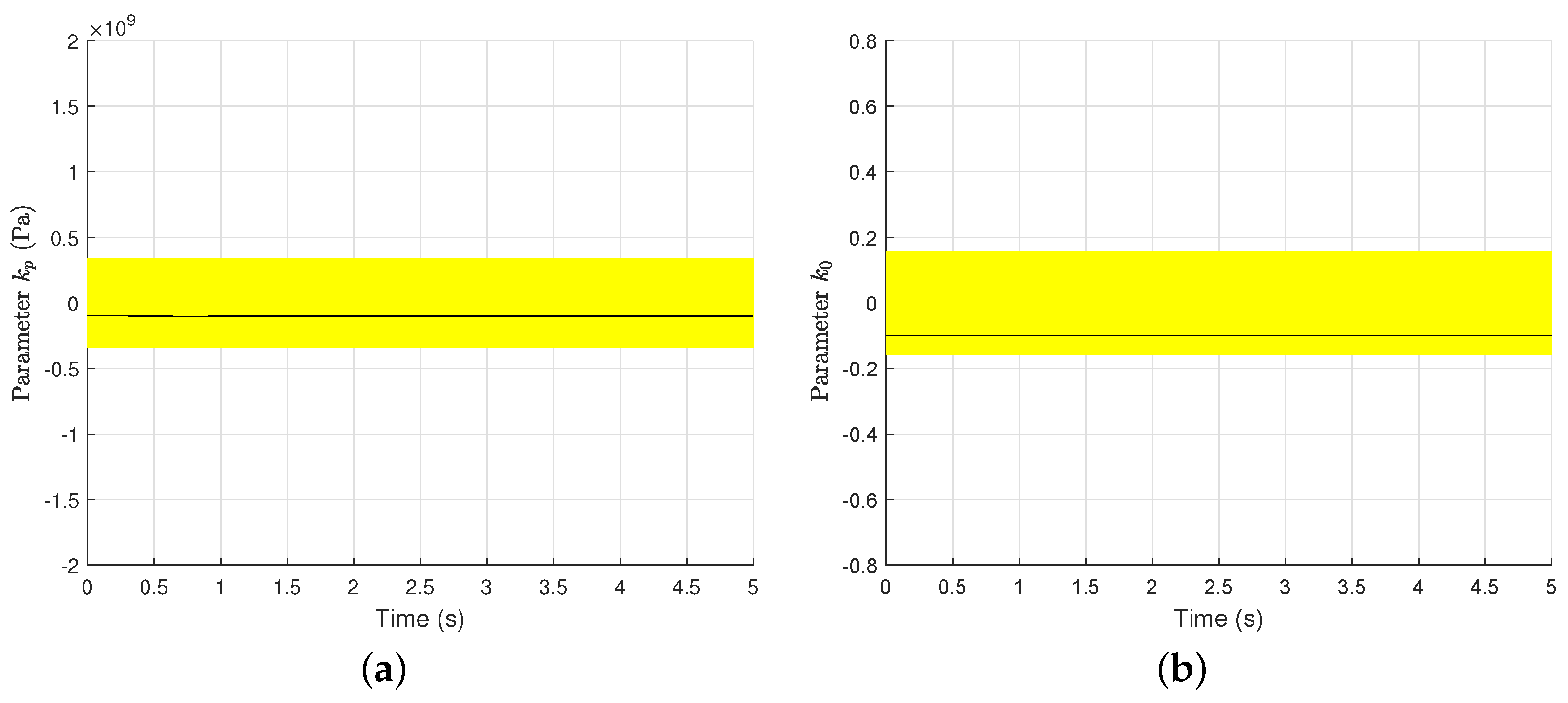
4.2. Convergence of the Vector Data Control Points
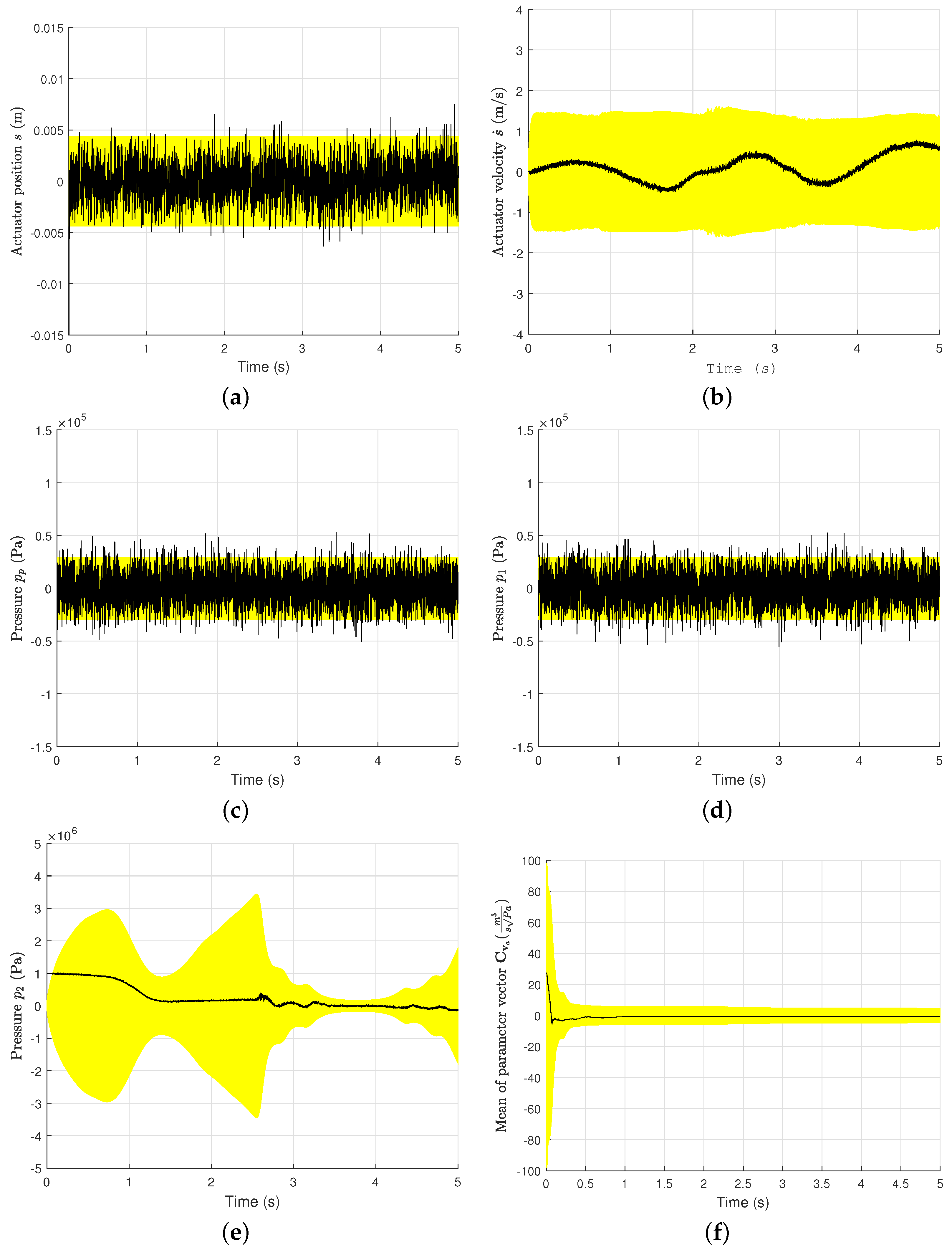
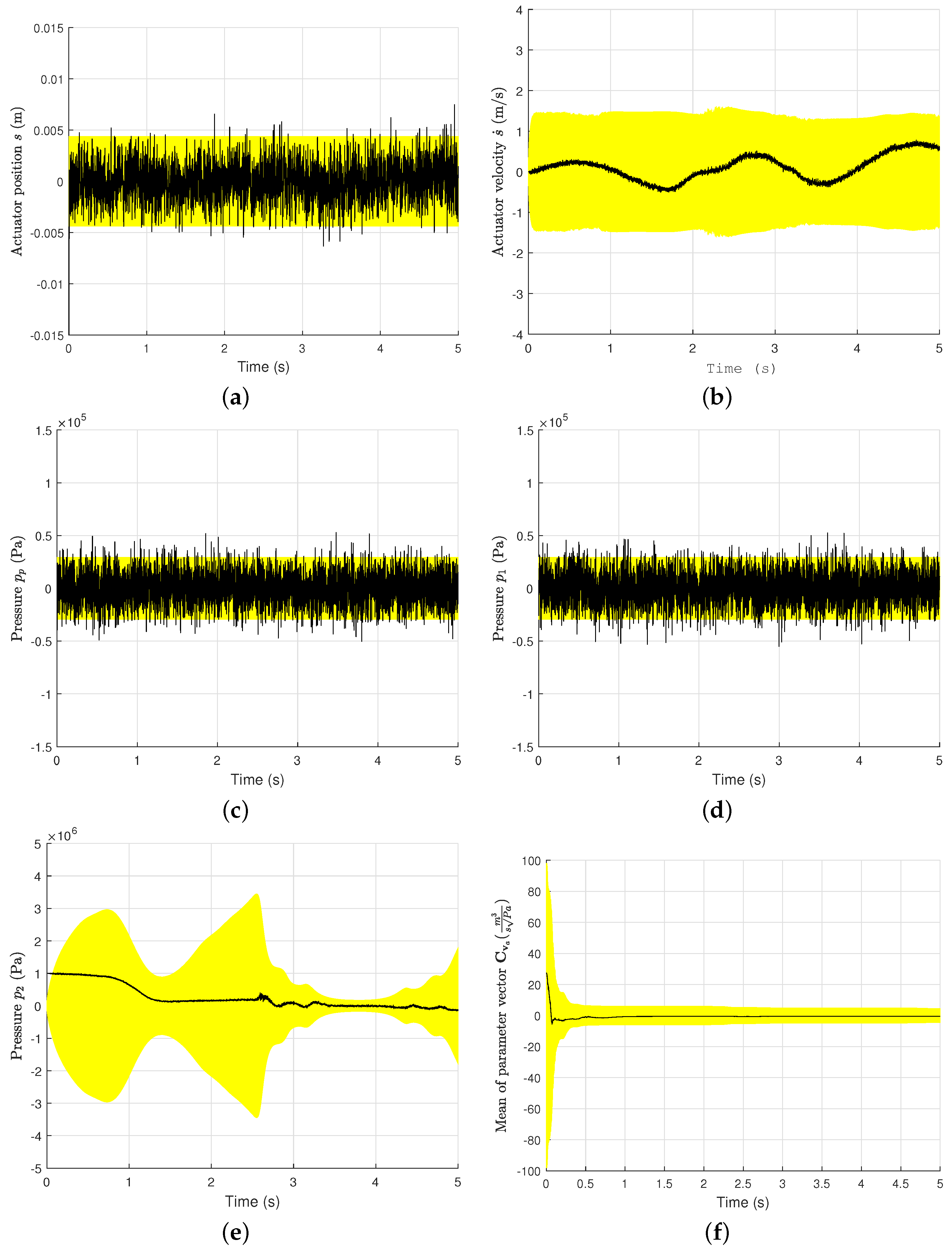
4.3. Accuracy Requirements of State Estimations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. The Estimation of the Curve Using Second-Order (Linear) B-Spline Interpolation
Appendix B. Estimation of the Pressure Flow Coefficient and the Flow Gain

References
- Schiehlen, W. Multibody Systems Handbook; Springer: Berlin/Heidelberg, Germany, 1990; Volume 6. [Google Scholar]
- Schiehlen, W. Multibody System Dynamics: Roots and Perspectives. Multibody Syst. Dyn. 1997, 1, 149–188. [Google Scholar] [CrossRef]
- Khadim, Q.; Hannola, L.; Donoghue, I.; Mikkola, A.; Kaikko, E.P.; Hukkataival, T. Integrating the user experience throughout the product lifecycle with real-time simulation-based digital twins. In Real-Time Simulation for Sustainable Production: Enhancing User Experience and Creating Business Value; Routledge: London, UK, 2021. [Google Scholar]
- Khadim, Q.; Kaikko, E.P.; Puolatie, E.; Mikkola, A. Targeting the user experience in the development of mobile machinery using real-time multibody simulation. Adv. Mech. Eng. 2020, 12, 1687814020923176. [Google Scholar] [CrossRef]
- Ukko, J.; Saunila, M.; Heikkinen, J.; Semken, R.S.; Mikkola, A. Real-Time Simulation for Sustainable Production: Enhancing User Experience and Creating Business Value; Routledge: London, UK, 2021. [Google Scholar]
- Boschert, S.; Rosen, R. Digital Twin—The Simulation Aspect. In Mechatronic Futures; Springer: Berlin/Heidelberg, Germany, 2016; pp. 59–74. [Google Scholar]
- Lim, K.Y.H.; Zheng, P.; Chen, C.H. A state-of-the-art survey of Digital Twin: Techniques, engineering product lifecycle management and business innovation perspectives. J. Intell. Manuf. 2019, 1–25. [Google Scholar] [CrossRef]
- Son, J.; Zhou, S.; Sankavaram, C.; Du, X.; Zhang, Y. Remaining useful life prediction based on noisy condition monitoring signals using constrained Kalman filter. Reliab. Eng. Syst. Saf. 2016, 152, 38–50. [Google Scholar] [CrossRef] [Green Version]
- Beebe, R.S.; Beebe, R.S. Predictive Maintenance of Pumps Using Condition Monitoring; Elsevier: Amsterdam, The Netherlands, 2004. [Google Scholar]
- Yang, M.S.; Su, C.F. On parameter estimation for normal mixtures based on fuzzy clustering algorithms. Fuzzy Sets Syst. 1994, 68, 13–28. [Google Scholar] [CrossRef]
- Yang, S.; Liu, T. State estimation for predictive maintenance using Kalman filter. Reliab. Eng. Syst. Saf. 1999, 66, 29–39. [Google Scholar] [CrossRef]
- Yang, S. An experiment of state estimation for predictive maintenance using Kalman filter on a DC motor. Reliab. Eng. Syst. Saf. 2002, 75, 103–111. [Google Scholar] [CrossRef]
- Kiani-Oshtorjani, M.; Mikkola, A.; Jalali, P. Numerical Treatment of Singularity in Hydraulic Circuits Using Singular Perturbation Theory. IEEE/ASME Trans. Mechatron. 2018, 24, 144–153. [Google Scholar] [CrossRef]
- Kiani-Oshtorjani, M.; Ustinov, S.; Handroos, H.; Jalali, P.; Mikkola, A. Real-Time Simulation of Fluid Power Systems Containing Small Oil Volumes, Using the Method of Multiple Scales. IEEE Access 2020, 8, 196940–196950. [Google Scholar] [CrossRef]
- Beck, J.V.; Arnold, K.J. Parameter Estimation in Engineering and Science; John Wiley and Sons Inc.: Hoboken, NJ, USA, 1977. [Google Scholar]
- Asparouhov, T.; Muthén, B. Weighted Least Squares Estimation with Missing Data. Mplus Tech. Append. 2010, 2010, 1–10. [Google Scholar]
- Lee, C.; Tan, O.T. A weighted-least-squares parameter estimator for synchronous machines. IEEE Trans. Power Appar. Syst. 1977, 96, 97–101. [Google Scholar] [CrossRef]
- Haykin, S. Kalman Filtering and Neural Networks; John Wiley & Sons: Hoboken, NJ, USA, 2004; Volume 47. [Google Scholar]
- Moradkhani, H.; Sorooshian, S.; Gupta, H.V.; Houser, P.R. Dual state–parameter estimation of hydrological models using ensemble Kalman filter. Adv. Water Resour. 2005, 28, 135–147. [Google Scholar] [CrossRef] [Green Version]
- Billings, S.; Jones, G. Orthogonal least-squares parameter estimation algorithms for non-linear stochastic systems. Int. J. Syst. Sci. 1992, 23, 1019–1032. [Google Scholar] [CrossRef]
- Zhang, Z. Parameter estimation techniques: A tutorial with application to conic fitting. Image Vis. Comput. 1997, 15, 59–76. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Xu, Q. Adaptive Sliding Mode Control With Parameter Estimation and Kalman Filter for Precision Motion Control of a Piezo-Driven Microgripper. IEEE Trans. Control. Syst. Technol. 2016, 25, 728–735. [Google Scholar] [CrossRef]
- Soltani, M.; Bozorg, M.; Zakerzadeh, M.R. Parameter estimation of an SMA actuator model using an extended Kalman filter. Mechatronics 2018, 50, 148–159. [Google Scholar] [CrossRef]
- Radecki, P.; Hencey, B. Online building thermal parameter estimation via Unscented Kalman Filtering. In 2012 American Control Conference (ACC); IEEE: Montreal, QC, Canada, 2012; pp. 3056–3062. [Google Scholar]
- Oka, Y.; Ohno, M. Parameter estimation for heat transfer analysis during casting processes based on ensemble Kalman filter. Int. J. Heat Mass Transf. 2020, 149, 119232. [Google Scholar] [CrossRef]
- Nonomura, T.; Shibata, H.; Takaki, R. Dynamic mode decomposition using a Kalman filter for parameter estimation. AIP Adv. 2018, 8, 105106. [Google Scholar] [CrossRef] [Green Version]
- Asl, R.M.; Hagh, Y.S.; Simani, S.; Handroos, H. Adaptive square-root unscented Kalman filter: An experimental study of hydraulic actuator state estimation. Mech. Syst. Signal Process. 2019, 132, 670–691. [Google Scholar]
- Pan, Z.; Zhang, Y.; Gustavsson, J.P.; Hickey, J.P.; Cattafesta, L.N., III. Unscented Kalman filter (UKF)-based nonlinear parameter estimation for a turbulent boundary layer: A data assimilation framework. Meas. Sci. Technol. 2020, 31, 094011. [Google Scholar] [CrossRef] [Green Version]
- Cuadrado, J.; Dopico, D.; Barreiro, A.; Delgado, E. Real-time state observers based on multibody models and the extended Kalman filter. J. Mech. Sci. Technol. 2009, 23, 894–900. [Google Scholar] [CrossRef]
- Sanjurjo, E.; Naya, M.Á.; Blanco-Claraco, J.L.; Torres-Moreno, J.L.; Giménez-Fernández, A. Accuracy and efficiency comparison of various nonlinear Kalman filters applied to multibody models. Nonlinear Dyn. 2017, 88, 1935–1951. [Google Scholar] [CrossRef]
- Sanjurjo, E.; Dopico, D.; Luaces, A.; Naya, M.Á. State and force observers based on multibody models and the indirect Kalman filter. Mech. Syst. Signal Process. 2018, 106, 210–228. [Google Scholar] [CrossRef]
- Cuadrado, J.; Dopico, D.; Perez, J.A.; Pastorino, R. Automotive observers based on multibody models and the extended Kalman filter. Multibody Syst. Dyn. 2012, 27, 3–19. [Google Scholar] [CrossRef] [Green Version]
- Naets, F.; Pastorino, R.; Cuadrado, J.; Desmet, W. Online state and input force estimation for multibody models employing extended Kalman filtering. Multibody Syst. Dyn. 2014, 32, 317–336. [Google Scholar] [CrossRef]
- Jaiswal, S.; Sanjurjo, E.; Cuadrado, J.; Sopanen, J.; Mikkola, A. State Estimator Based on an Indirect Kalman filter for a Hydraulically Actuated Multibody System. Multibody Syst. Dyn. 2021. in review. [Google Scholar]
- Blanchard, E.D.; Sandu, A.; Sandu, C. A Polynomial Chaos-Based Kalman Filter Approach for Parameter Estimation of Mechanical Systems. J. Dyn. Syst. Meas. Control 2010, 132. [Google Scholar] [CrossRef]
- Rodríguez, A.J.; Sanjurjo, E.; Pastorino, R.; Naya, M.Á. State, parameter and input observers based on multibody models and Kalman filters for vehicle dynamics. Mech. Syst. Signal Process. 2021, 155, 107544. [Google Scholar] [CrossRef]
- Sandu, A.; Sandu, C.; Ahmadian, M. Modeling Multibody Systems with Uncertainties. Part I: Theoretical and Computational Aspects. Multibody Syst. Dyn. 2006, 15, 369–391. [Google Scholar] [CrossRef]
- Sandu, C.; Sandu, A.; Ahmadian, M. Modeling multibody systems with uncertainties. Part II: Numerical applications. Multibody Syst. Dyn. 2006, 15, 241–262. [Google Scholar] [CrossRef]
- Kolansky, J.; Sandu, C. Enhanced Polynomial Chaos-Based Extended Kalman Filter Technique for Parameter Estimation. J. Comput. Nonlinear Dyn. 2018, 13, 021012. [Google Scholar] [CrossRef]
- Pence, B.L.; Fathy, H.K.; Stein, J.L. Recursive Estimation for Reduced-Order State-Space Models Using Polynomial Chaos Theory Applied to Vehicle Mass Estimation. IEEE Trans. Control. Syst. Technol. 2013, 22, 224–229. [Google Scholar] [CrossRef]
- Manring, N.D.; Fales, R.C. Hydraulic Control Systems; John Wiley & Sons: Hoboken, NJ, USA, 2019. [Google Scholar]
- Skousen, P.L. Valve Handbook; McGraw-Hill Education: New York, NY, USA, 2011. [Google Scholar]
- Wu, D.; Li, S.; Wu, P. CFD simulation of flow-pressure characteristics of a pressure control valve for automotive fuel supply system. Energy Convers. Manag. 2015, 101, 658–665. [Google Scholar] [CrossRef]
- Lisowski, E.; Filo, G.; Rajda, J. Pressure compensation using flow forces in a multi-section proportional directional control valve. Energy Convers. Manag. 2015, 103, 1052–1064. [Google Scholar] [CrossRef]
- Lisowski, E.; Rajda, J. CFD analysis of pressure loss during flow by hydraulic directional control valve constructed from logic valves. Energy Convers. Manag. 2013, 65, 285–291. [Google Scholar] [CrossRef]
- Simon, D. Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Grewal, M.S.; Andrews, A.P. Kalman Filtering: Theory and Practice Using MATLAB; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- De Boor, C.; De Boor, C. A Practical Guide to Splines; Springer: New York, NY, USA, 1978; Volume 27. [Google Scholar]
- De Boor, C. On calculating with B-splines. J. Approx. Theory 1972, 6, 50–62. [Google Scholar] [CrossRef] [Green Version]
- Jauch, J.; Bleimund, F.; Rhode, S.; Gauterin, F. Recursive B-spline approximation using the Kalman filter. Eng. Sci. Technol. Int. J. 2017, 20, 28–34. [Google Scholar] [CrossRef] [Green Version]
- Lim, K.H.; Seng, K.P.; Ang, L.M. River Flow Lane Detection and Kalman Filtering-Based B-spline Lane Tracking. Int. J. Veh. Technol. 2012, 2012, 465819. [Google Scholar] [CrossRef]
- Charles, G.; Goodall, R.; Dixon, R. Wheel-Rail Profile Estimation. In Proceedings of the 2006 IET International Conference on Railway Condition Monitoring, Birmingham, UK, 29–30 November 2006; pp. 32–37. [Google Scholar]
- Squire, W.; Trapp, G. Using Complex Variables to Estimate Derivatives of Real Functions. Siam Rev. 1998, 40, 110–112. [Google Scholar] [CrossRef] [Green Version]
- Lai, K.L.; Crassidis, J.; Cheng, Y.; Kim, J. New complex-step derivative approximations with application to second-order kalman filtering. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, San Francisco, CA, USA, 15–18 August 2005; p. 5944. [Google Scholar]
- Jaiswal, S.; Rahikainen, J.; Khadim, Q.; Sopanen, J.; Mikkola, A. Comparing double-step and penalty-based semirecursive formulations for hydraulically actuated multibody systems in a monolithic approach. Multibody Syst. Dyn. 2021, 52, 1–23. [Google Scholar] [CrossRef]
- Rodríguez, J.I.; Jiménez, J.M.; Funes, F.J.; de Jalón, J.G. Recursive and Residual Algorithms for the Efficient Numerical Integration of Multi-Body Systems. Multibody Syst. Dyn. 2004, 11, 295–320. [Google Scholar] [CrossRef]
- Jaiswal, S.; Korkealaakso, P.; Åman, R.; Sopanen, J.; Mikkola, A. Deformable Terrain Model for the Real-Time Multibody Simulation of a Tractor With a Hydraulically Driven Front-Loader. IEEE Access 2019, 7, 172694–172708. [Google Scholar] [CrossRef]
- Callejo, A.; Pan, Y.; Ricon, J.L.; Kövecses, J.; Garcia de Jalon, J. Comparison of Semirecursive and Subsystem Synthesis Algorithms for the Efficient Simulation of Multibody Systems. J. Comput. Nonlinear Dyn. 2017, 12, 011020. [Google Scholar] [CrossRef]
- De Jalon, J.G.; Bayo, E. Kinematic and Dynamic Simulation of Multibody Systems: The Real-Time Challenge; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Flores, P.; Ambrósio, J.; Claro, J.P.; Lankarani, H.M. Kinematics and Dynamics of Multibody Systems with Imperfect Joints: Models and Case Studies; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2008; Volume 34. [Google Scholar]
- Cuadrado, J.; Dopico, D.; Naya, M.A.; Gonzalez, M. Real-Time Multibody Dynamics and Applications. In Simulation Techniques for Applied Dynamics; Springer: Vienna, Austria, 2008; pp. 247–311. [Google Scholar]
- de García Jalón, J.; Álvarez, E.; De Ribera, F.; Rodríguez, I.; Funes, F. A Fast and Simple Semi-Recursive Formulation for Multi-Rigid-Body Systems. In Advances in Computational Multibody Systems; Springer: Dordrecht, The Netherlands, 2005; Volume 2, pp. 1–23. [Google Scholar]
- Hidalgo, A.F.; Garcia de Jalon, J. Real-Time Dynamic Simulations of Large Road Vehicles Using Dense, Sparse, and Parallelization Techniques. J. Comput. Nonlinear Dyn. 2015, 10, 031005. [Google Scholar] [CrossRef]
- Pan, Y.; He, Y.; Mikkola, A. Accurate real-time truck simulation via semirecursive formulation and Adams–Bashforth–Moulton algorithm. Acta Mech. Sin. 2019, 35, 641–652. [Google Scholar] [CrossRef]
- Watton, J. Fluid Power Systems: Modeling, Simulation, Analog, and Microcomputer Control; Prentice Hall: Hoboken, NJ, USA, 1989. [Google Scholar]
- Handroos, H.; Vilenius, M. Flexible Semi-Empirical Models for Hydraulic Flow Control Valves. J. Mech. Des. 1991, 113, 232–238. [Google Scholar] [CrossRef]
- Lu, Q.; Tiainen, J.; Kiani-Oshtorjani, M.; Ruan, J. Radial Flow Force at the Annular Orifice of a Two-Dimensional Hydraulic Servo Valve. IEEE Access 2020, 8, 207938–207946. [Google Scholar] [CrossRef]
- Mohammadi, M.; Kiani-Oshtorjani, M.; Mikkola, A. The Effects of Oil Entrained Air on the Dynamic Performance of a Hydraulically Driven Multibody System. Int. Rev. Model. Simul. (IREMOS) 2020, 13. [Google Scholar] [CrossRef]
- Jaiswal, S.; Sopanen, J.; Mikkola, A. Efficiency Comparison of Vrious Fiction models of a Hydraulic Cylinder in the Framework of Multibody System Dynamics. Nonlinear Dyn. 2021, 104, 3497–3515. [Google Scholar] [CrossRef]
- Brown, P.; McPhee, J. A Continuous Velocity-Based Friction Model for Dynamics and Control With Physically Meaningful Parameters. J. Comput. Nonlinear Dyn. 2016, 11, 054502. [Google Scholar] [CrossRef]
- Naya, M.A.; Cuadrado, J.; Dopico, D.; Lugris, U. An efficient unified method for the combined simulation of multibody and hydraulic dynamics: Comparison with simplified and co-integration approaches. Arch. Mech. Eng. 2011, 58, 223–243. [Google Scholar] [CrossRef] [Green Version]
- Rahikainen, J.; Kiani-Oshtorjani, M.; Sopanen, J.; Jalali, P.; Mikkola, A. Computationally efficient approach for simulation of multibody and hydraulic dynamics. Mech. Mach. Theory 2018, 130, 435–446. [Google Scholar] [CrossRef]
- Wanner, G.; Hairer, E. Solving Ordinary Differential Equations II; Springer: Berlin/Heidelberg, Germany, 1996; Volume 375. [Google Scholar]
- Eich-Soellner, E.; Führer, C. Numerical Methods in Multibody Dynamics; Springer: Berlin/Heidelberg, Germany, 1998; Volume 375. [Google Scholar]
- Brenan, K.E.; Campbell, S.L.; Petzold, L.R. Numerical Solution of Initial-Value Problems in Differential-Algebraic Equations; SIAM: University City, PA, USA, 1995. [Google Scholar]
- SMC. Actuator Position Sensor. Available online: http://ca01.smcworld.com/catalog/New-products-en/mpv/es20-257-d-mp/data/es20-257-d-mp.pdf (accessed on 20 July 2021).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Pump flow rate | 0.001 | |
| Tank pressure | 0.1 MPa | |
| Volume of the hose p | 3.42 | |
| Volume of the hose 1 | 3.42 | |
| Volume of the hose 2 | 3.42 | |
| Oil density | 869 / | |
| Hydraulic parameter | 1600 MPa | |
| Hydraulic parameter | 0.5 | |
| Area of the piston | 2 | |
| Area of the piston-rod | 1.8 | |
| Length of the cylinder/piston | l | |
| Area of pressure relief valve | 2.24 | |
| Area of directional control valve | 1.96 | |
| Coulomb friction force | 210 N | |
| Static friction force | 830 N | |
| Stribeck velocity | 1.25 / | |
| Coefficient of viscous friction | 330 / | |
| Discharge coefficient | 0.5 | |
| Area of throttle | 2.24 |
| Errors | Symbol | Real Model | Estimation Model | Simulation Model |
|---|---|---|---|---|
| State | ||||
| State | 7.6 MPa | 5.6 MPa | 5.6 MPa | |
| State | 1 MPa | 2 MPa | 2 MPa | |
| Parameter | Non-linear | Linear | Linear | |
| Parameter | Non-linear | Linear | Linear | |
| Parameter | Non-linear | Linear | Linear | |
| Parameter | Non-linear | Linear | Linear | |
| Parameter | 0.5 | 0.4 | 0.4 | |
| Parameter | 1600 MPa | 1500 MPa | 1500 MPa |
| Control Points | Control Point Vector | RMSE | RMSE |
|---|---|---|---|
| Three points | |||
| Four points | |||
| Five points | |||
| Six points |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khadim, Q.; Kiani-Oshtorjani, M.; Jaiswal, S.; Matikainen, M.K.; Mikkola, A. Estimating the Characteristic Curve of a Directional Control Valve in a Combined Multibody and Hydraulic System Using an Augmented Discrete Extended Kalman Filter. Sensors 2021, 21, 5029. https://doi.org/10.3390/s21155029
Khadim Q, Kiani-Oshtorjani M, Jaiswal S, Matikainen MK, Mikkola A. Estimating the Characteristic Curve of a Directional Control Valve in a Combined Multibody and Hydraulic System Using an Augmented Discrete Extended Kalman Filter. Sensors. 2021; 21(15):5029. https://doi.org/10.3390/s21155029
Chicago/Turabian StyleKhadim, Qasim, Mehran Kiani-Oshtorjani, Suraj Jaiswal, Marko K. Matikainen, and Aki Mikkola. 2021. "Estimating the Characteristic Curve of a Directional Control Valve in a Combined Multibody and Hydraulic System Using an Augmented Discrete Extended Kalman Filter" Sensors 21, no. 15: 5029. https://doi.org/10.3390/s21155029
APA StyleKhadim, Q., Kiani-Oshtorjani, M., Jaiswal, S., Matikainen, M. K., & Mikkola, A. (2021). Estimating the Characteristic Curve of a Directional Control Valve in a Combined Multibody and Hydraulic System Using an Augmented Discrete Extended Kalman Filter. Sensors, 21(15), 5029. https://doi.org/10.3390/s21155029