
Path Planning for Mobile Robot Based on Improved Bat Algorithm

Abstract
:1. Introduction
2. Global Path Planning Based on Algorithm
2.1. Basic Bat Algorithm
- (1)
- All bats use the difference in sensory echoes to determine the difference between food and obstacles.
- (2)
- Bats fly randomly at a speed , position , and a fixed frequency (or wavelength). They use different wavelengths , and loudness , to search for prey.
- (3)
- Although the loudness changes in different situations, it is assumed here that the loudness changes from a large positive number to a minimum value .
2.2. Improved Bat Algorithm
2.2.1. Logarithmic Decreasing Strategy
2.2.2. Cauchy Disturbance
2.2.3. Environment Model and Fitness Function
- (1)
- The shortest path is required, so the path length, as a fitness function, is the sum of the line lengths between all adjacent path points, which can be expressed by the following formula:where , represents the horizontal and vertical coordinates of path points and in the grid map.
- (2)
- Penalty function: used to remove obstacles in the search process.where is the coefficient with the obstacle, which is a large constant. is the number of collisions with obstacles. When the path is a collision free safe path, this item is 0.
- (3)
- Path smoothness function: the steering cost of the mobile robot when following the path. Since the robot usually decelerates when turning, the size of the path turning angle is closely related to the working time of the robot. The turning angle in the grid is or . The path smoothness function is calculated as follows:where is the number of turning angle equals to in the path and is the number of turning angle equals to in the path.
3. Dynamic Window Approach
3.1. Kinematics Model
3.2. Robot Velocity Space
- (1)
- Maximal and minimal speed constraints:
- (2)
- Acceleration constraints:
- (3)
- Safety constraint:
3.3. Evaluation Function
4. Fusion Algorithm and Path Switching Strategy
4.1. Fusion Method
- Step 1.
- Building a grid map based on the robot workspace.
- Step 2.
- Using the improved bat algorithm to get a global shortest path without collisions.
- Step 3.
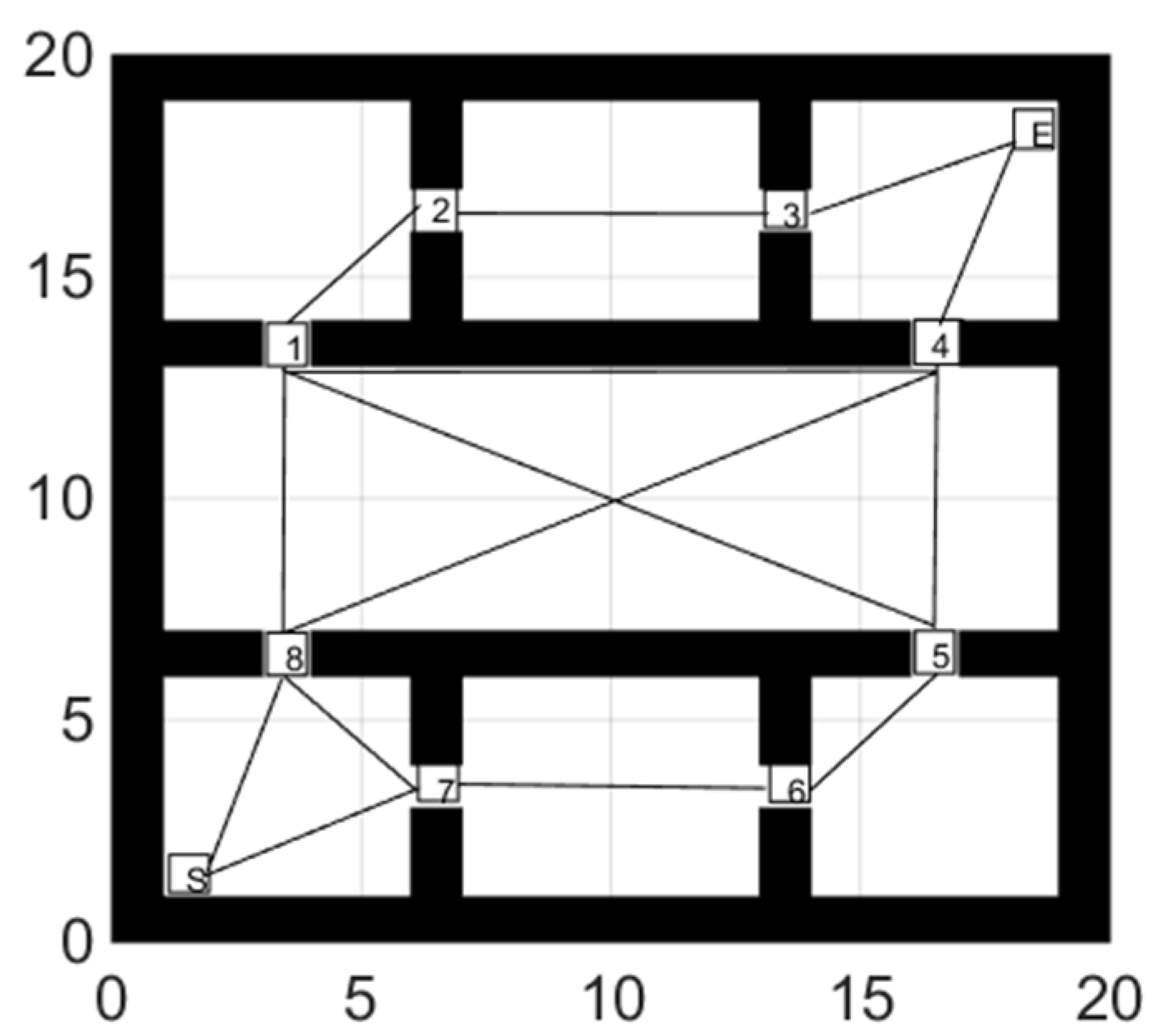
- Extracting turning points from the global path. These turning points will be used as local targets in turn. In the improved dynamic window method, the distance and azimuth from current position to local target will be calculated.
- Step 4.
- When the robot is moving towards the position of the local target point, once a new obstacle appears in the environment, the position information of the obstacle will be added in the hybrid path planning algorithm.
- Step 5.
- When the robot successfully bypasses the obstacle, it will return to the original path. If the current local target point is reached or it is found occupied by an obstacle, the local target point will be switched to be the next turning point.
- Step 6.
- Path planning and moving of the robot stops when the mobile robot reaches the end of the global path, or the end is surrounded by obstacles and the robot cannot reach it.
4.2. Path Switch Strategy
5. Simulation Results
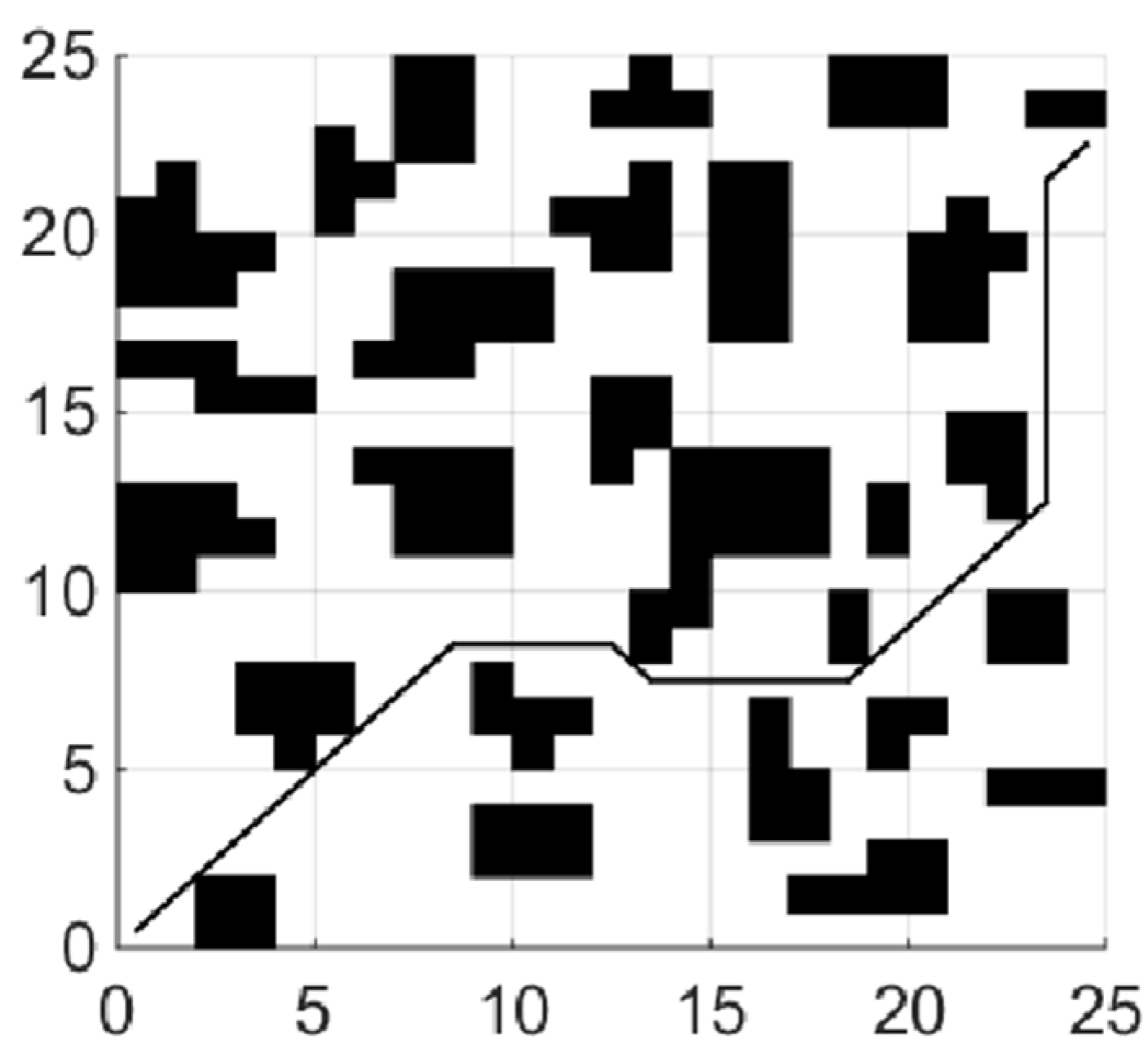
5.1. Global Path Planning
- (1)
- Shortest collision free path
- (2)
- Minimum number of corners
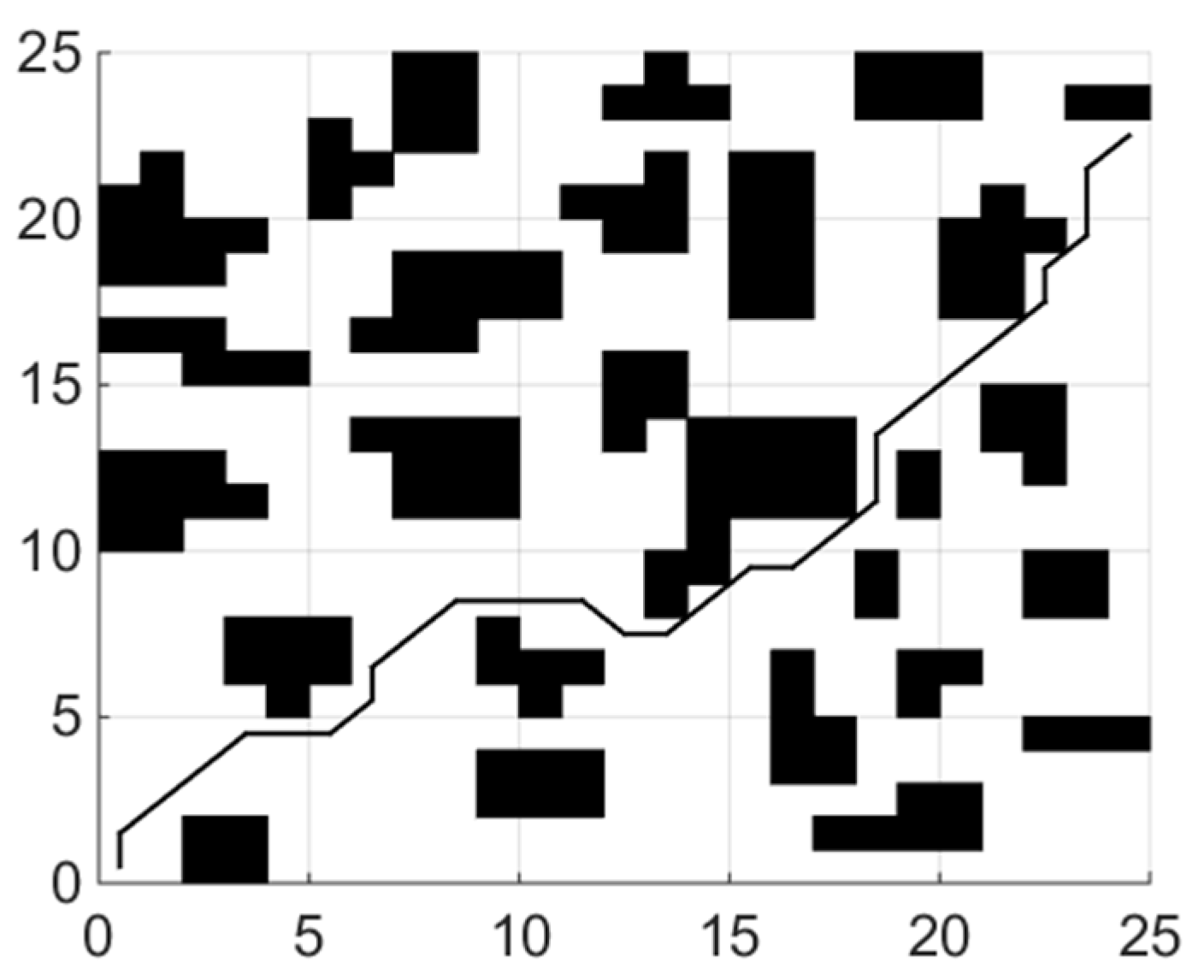
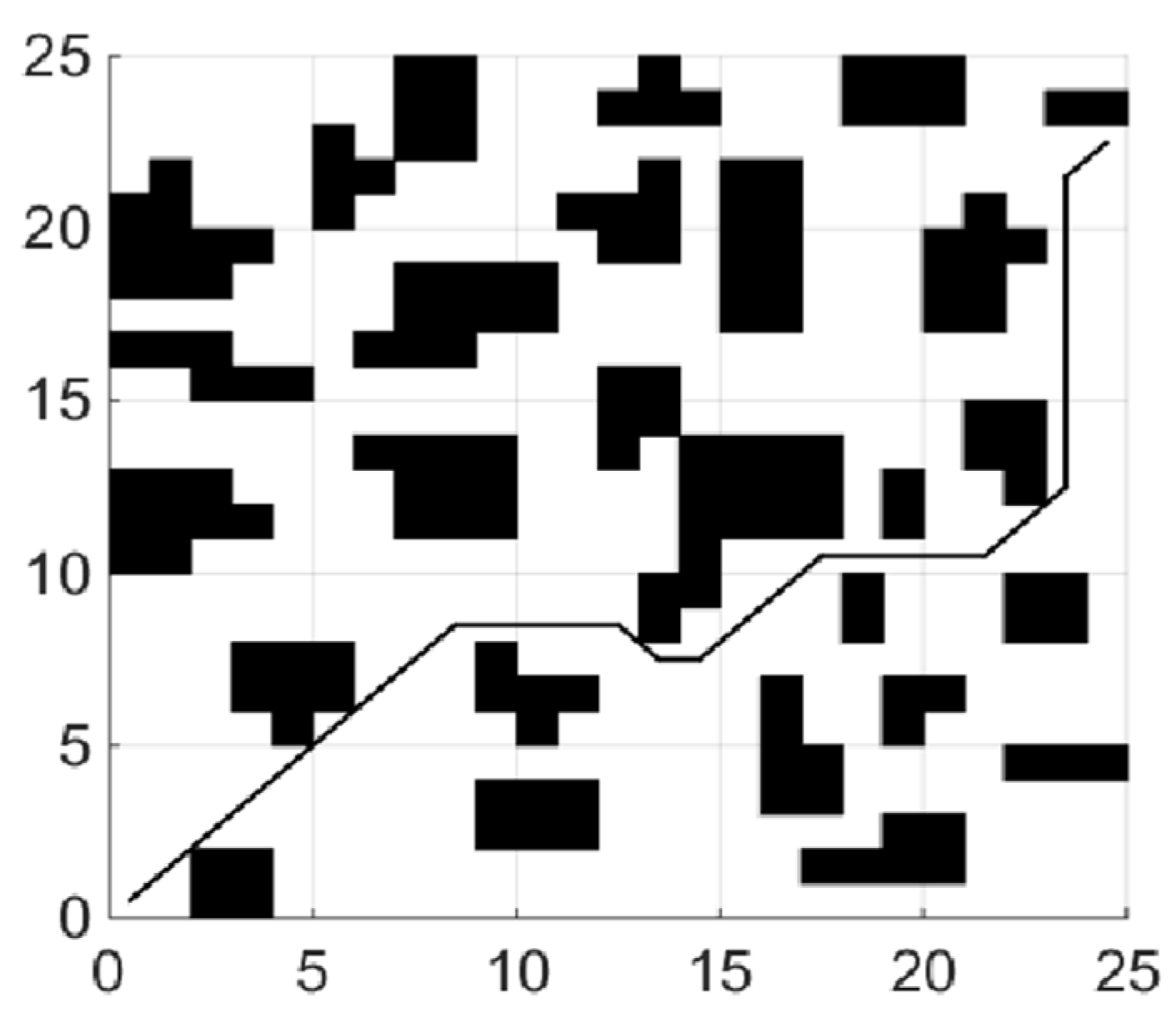
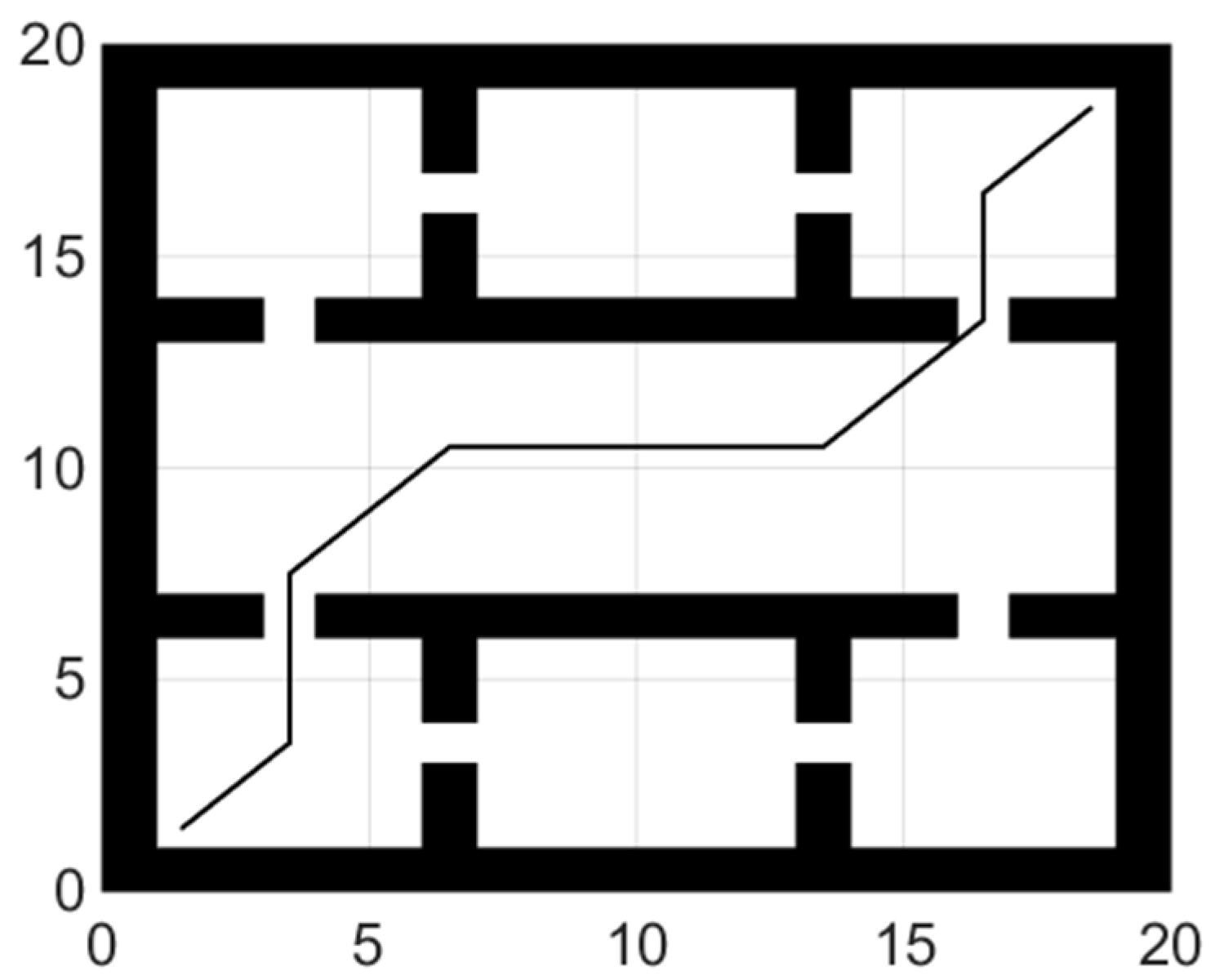
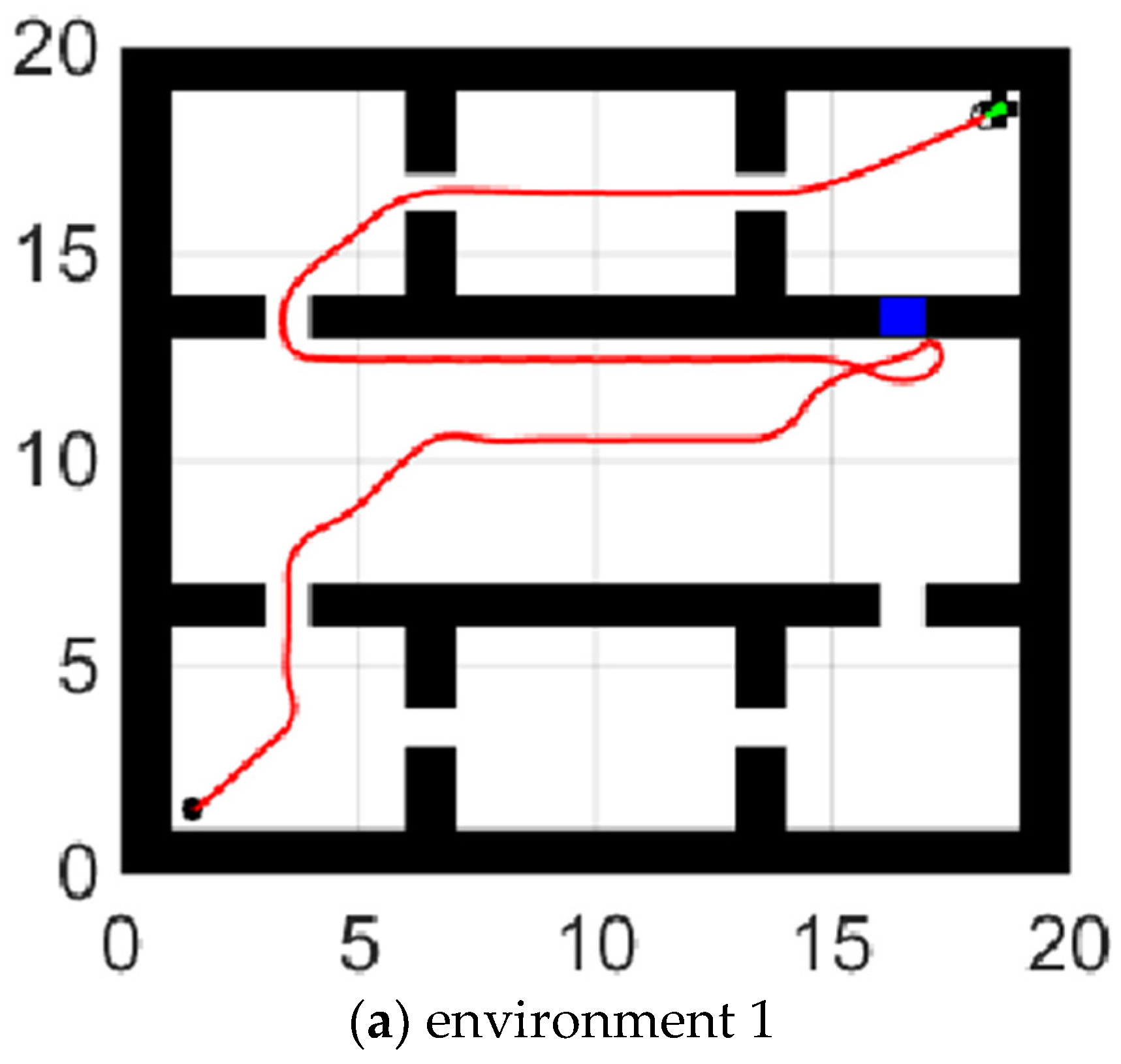
5.2. Hybrid Path Planning
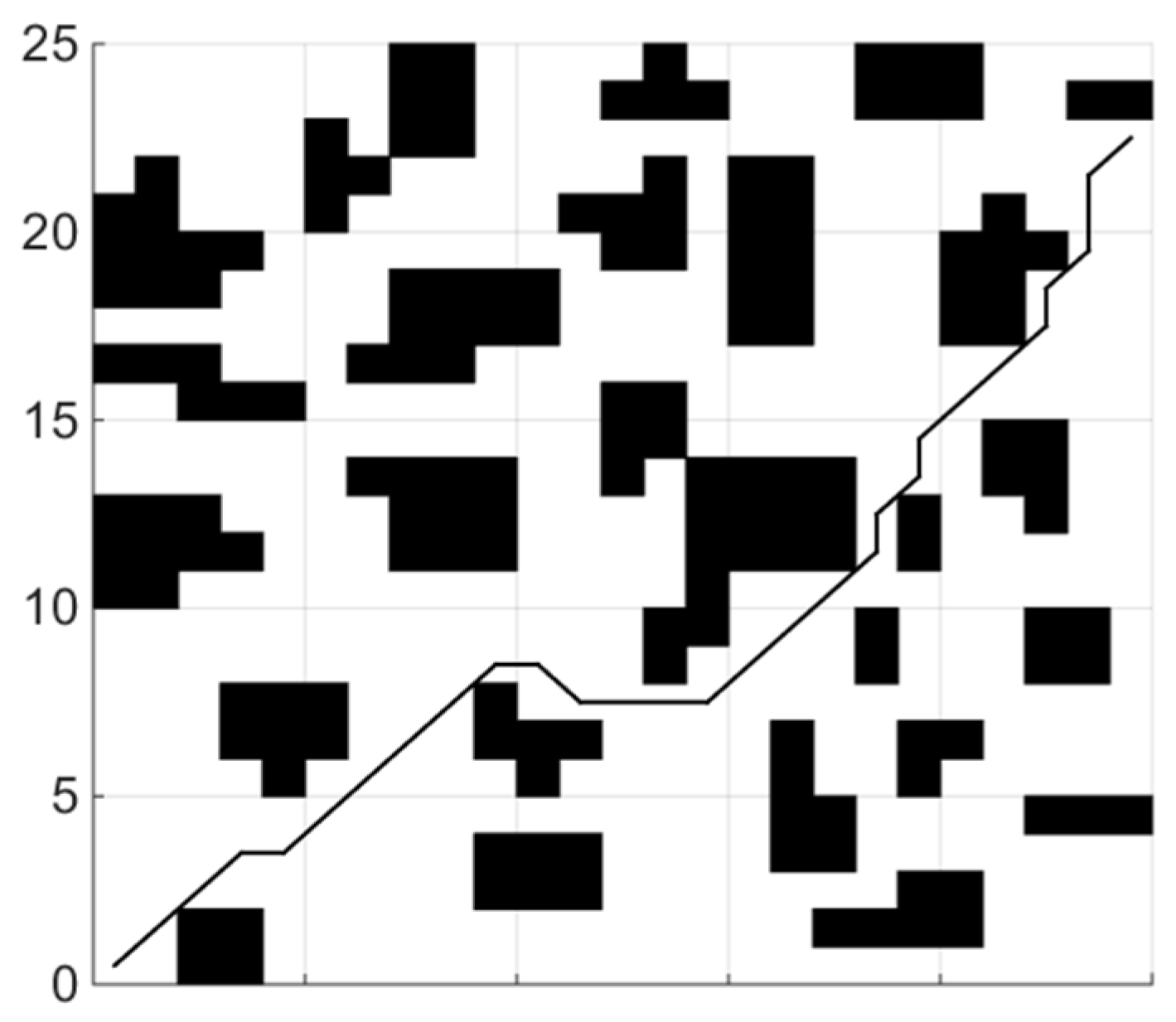
5.3. Path Switch Strategy
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ajeil, F.H.; Ibraheem, I.K.; Azar, A.T.; Humaidi, A.J. Grid-Based Mobile Robot Path Planning Using Aging-Based Ant Colony Optimization Algorithm in Static and Dynamic Environments. Sensors 2020, 20, 1880. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, F.; Zhang, Q.; Zhou, Y. Jump Point Search Algorithm for Path Planning of Home Service Robots. J. Beijing Inf. Sci. Technol. Univ. 2018, 33, 85–89. [Google Scholar]
- Gorbenko, A.; Popov, V. Multi-agent path planning. Appl. Math. Sci. 2012, 6, 6733–6737. [Google Scholar]
- Chakraborty, J.; Mukhopadhyay, S. A robust cooperative multi-robot path-planning in noisy environment. In Proceedings of the 2010 5th International Conference on Industrial and Information Systems, Mangalore, India, 29 July–1 August 2010; Volume 7, pp. 626–631. [Google Scholar] [CrossRef]
- Zhang, H.Y.; Lin, W.M.; Chen, A.X. Path planning for the mobile robot: A review. Symmetry 2018, 10, 450. [Google Scholar] [CrossRef] [Green Version]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Stentz, A. The D* Algorithm for Real-Time Planning of Optimal Traverses; Carnegie Mellon University: Pittsburgh, PA, USA, 2011; Available online: https://www.ri.cmu.edu/publications/the-d-algorithm-for-real-time-planning-of-optimal-traverses/ (accessed on 10 June 2021).
- Kadry, S.; Abdallah, A.; Joumaa, C. On the Optimization of Dijkstra’s Algorithm. In Informatics in Control, Automation and Robotics. Lecture Notes in Electrical Engineering; Yang, D., Ed.; Springer: Berlin/Heidelberg, Germany, 2011; Volume 133. [Google Scholar]
- Tang, G.-X.; Chen, X. Application of PSO in robotic path planning. Comput. Eng. Appl. 2007. Available online: http://en.cnki.com.cn/Article_en/CJFDTOTAL-JSGG200716070.htm (accessed on 10 June 2021).
- Strąk, Ł.; Skinderowicz, R.; Boryczka, U.; Nowakowski, A. A Self-Adaptive Discrete PSO Algorithm with Heterogeneous Parameter Values for Dynamic TSP. Entropy 2019, 21, 738. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Beschi, M.; Mutti, S.; Nicola, G.; Faroni, M.; Magnoni, P.; Villagrossi, E.; Pedrocchi, N. Optimal Robot Motion Planning of Redundant Robots in Machining and Additive Manufacturing Applications. Electronics 2019, 8, 1437. [Google Scholar] [CrossRef] [Green Version]
- Xiao, X.; Nan, H.; Yu, X. Application of improved firefly algorithm in path planning. J. Electron. Meas. Instrum. 2016, 30, 1735–1742. [Google Scholar]
- Lamini, C.; Benhlima, S.; Elbekri, A. Genetic Algorithm Based Approach for Autonomous Mobile Robot Path Planning. Procedia Comput. Sci. 2018, 127, 180–189. [Google Scholar] [CrossRef]
- Huang, Y.; Peng, K.; Yuan, M. Path planning for mobile robots based on multi-strategy hybrid artificial fish swarm algorithm. Inf. Control. 2017, 46, 283–288. [Google Scholar]
- Yang, X.S. A New Metaheuristic Bat-Inspired Algorithm. Comput. Knowl. Technol. 2010, 284, 65–74. [Google Scholar]
- Xu, C.; Xu, Z.; Xia, M. Obstacle Avoidance in a Three-Dimensional Dynamic Environment Based on Fuzzy Dynamic Windows. Appl. Sci. 2021, 11, 504. [Google Scholar] [CrossRef]
- Tang, H.; Sun, W.; Yu, H.; Lin, A.; Xue, M. A multirobot target searching method based on bat algorithm in unknown environments. Expert Syst. Appl. 2020, 141, 0957–4174. [Google Scholar] [CrossRef]
- Ozdemir, A.; Sezer, V. A hybrid obstacle avoidance method: Follow the gap with dynamic window approach. In Proceedings of the 2017 First IEEE International Conference on Robotic Computing (IRC), Taichung, Taiwan, 10–12 April 2017; pp. 257–262. [Google Scholar]
- Fox, D.; Burgard, W.; Thrun, S. The dynamic window approach to collision avoidance. IEEE Robot. Autom. Mag. 1997, 4, 23–33. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Z.; Xie, J.; Wang, Z. Global Dynamic Path Planning Based on Fusion of A* Algorithm and Dynamic Window Approach. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; Volume 12, pp. 5572–5576. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Maximum/m | Minimum/m | Average/m | Variance/m |
|---|---|---|---|---|
| PSO | 45.46 | 38.04 | 41.79 | 3.06 |
| BA | 45.21 | 37.46 | 39.96 | 4.65 |
| IBA | 41.21 | 36.87 | 38.81 | 1.81 |
| Maximum | Minimum | Average | |
|---|---|---|---|
| 0 | 16 | 9 | 12.6 |
| 0.1 | 12 | 6 | 9.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, X.; Yuan, X.; Wang, X. Path Planning for Mobile Robot Based on Improved Bat Algorithm. Sensors 2021, 21, 4389. https://doi.org/10.3390/s21134389
Yuan X, Yuan X, Wang X. Path Planning for Mobile Robot Based on Improved Bat Algorithm. Sensors. 2021; 21(13):4389. https://doi.org/10.3390/s21134389
Chicago/Turabian StyleYuan, Xin, Xinwei Yuan, and Xiaohu Wang. 2021. "Path Planning for Mobile Robot Based on Improved Bat Algorithm" Sensors 21, no. 13: 4389. https://doi.org/10.3390/s21134389
APA StyleYuan, X., Yuan, X., & Wang, X. (2021). Path Planning for Mobile Robot Based on Improved Bat Algorithm. Sensors, 21(13), 4389. https://doi.org/10.3390/s21134389