
Robustly Adaptive EKF PDR/UWB Integrated Navigation Based on Additional Heading Constraint




Abstract
:1. Introduction
2. Methods
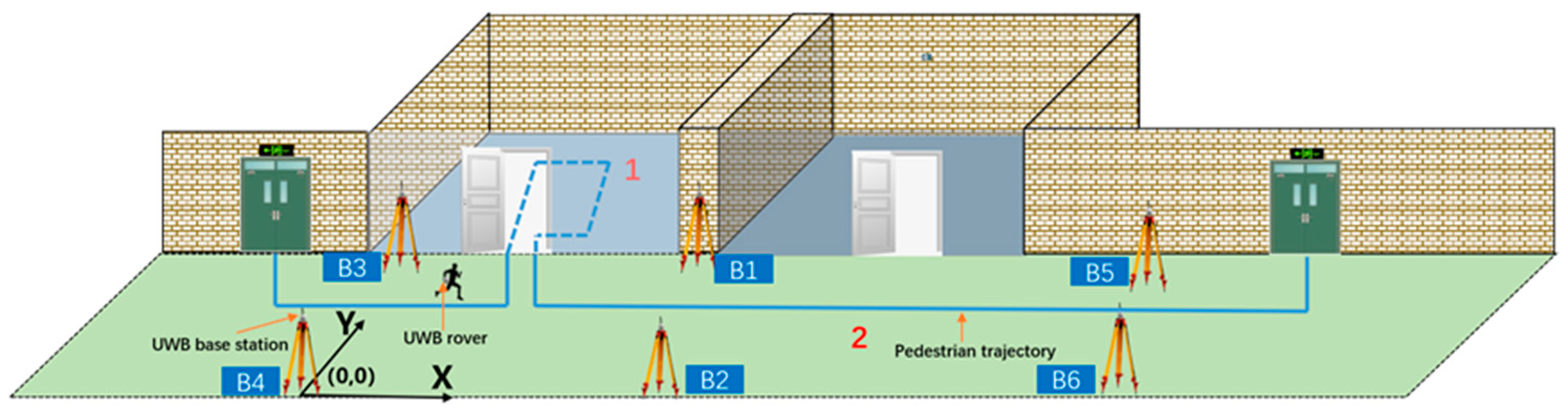
2.1. UWB Positioning System
2.2. PDR Positioning System
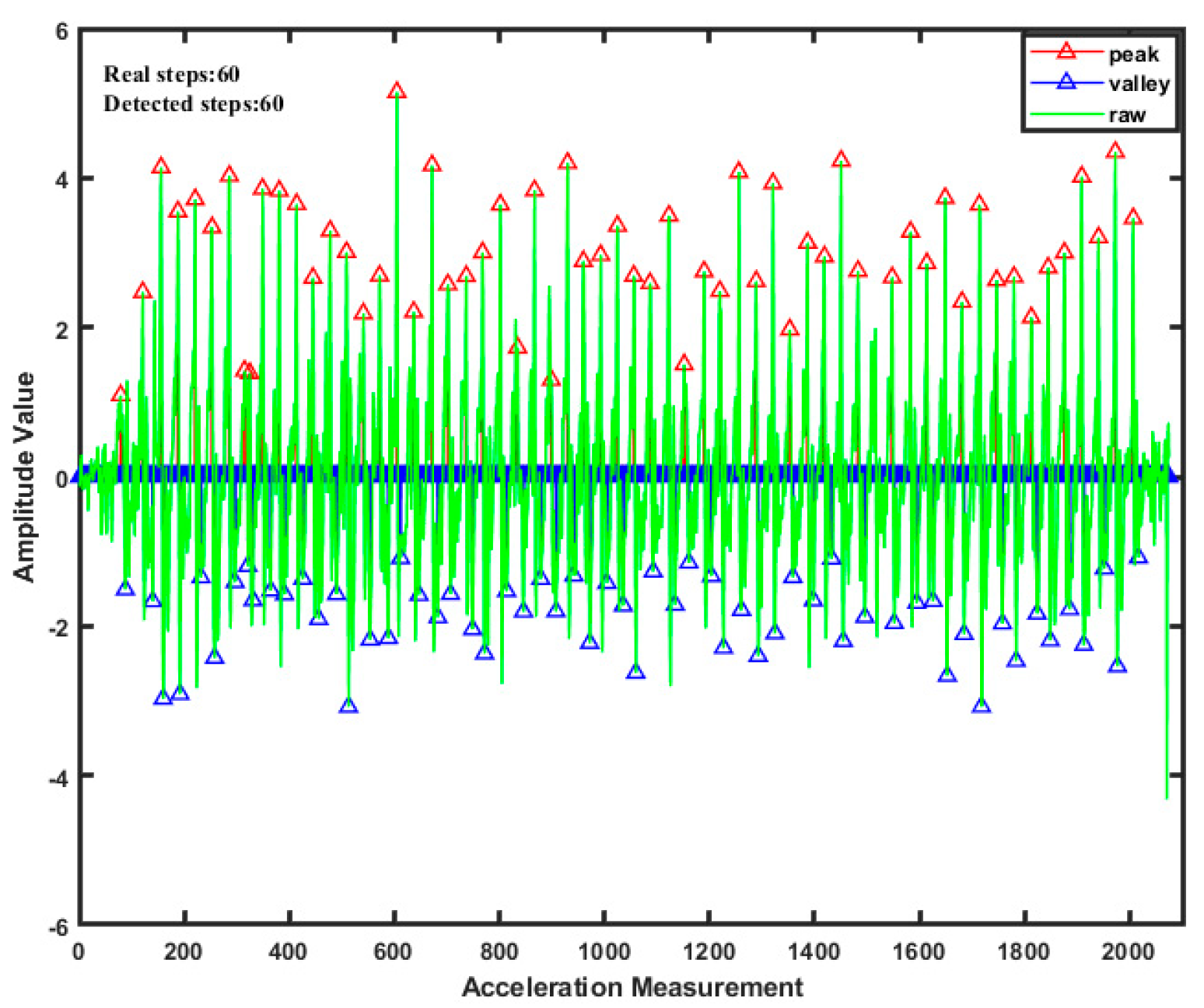
2.2.1. Gait Detection with Multi-Threshold Constraints
2.2.2. PDR Position Solution
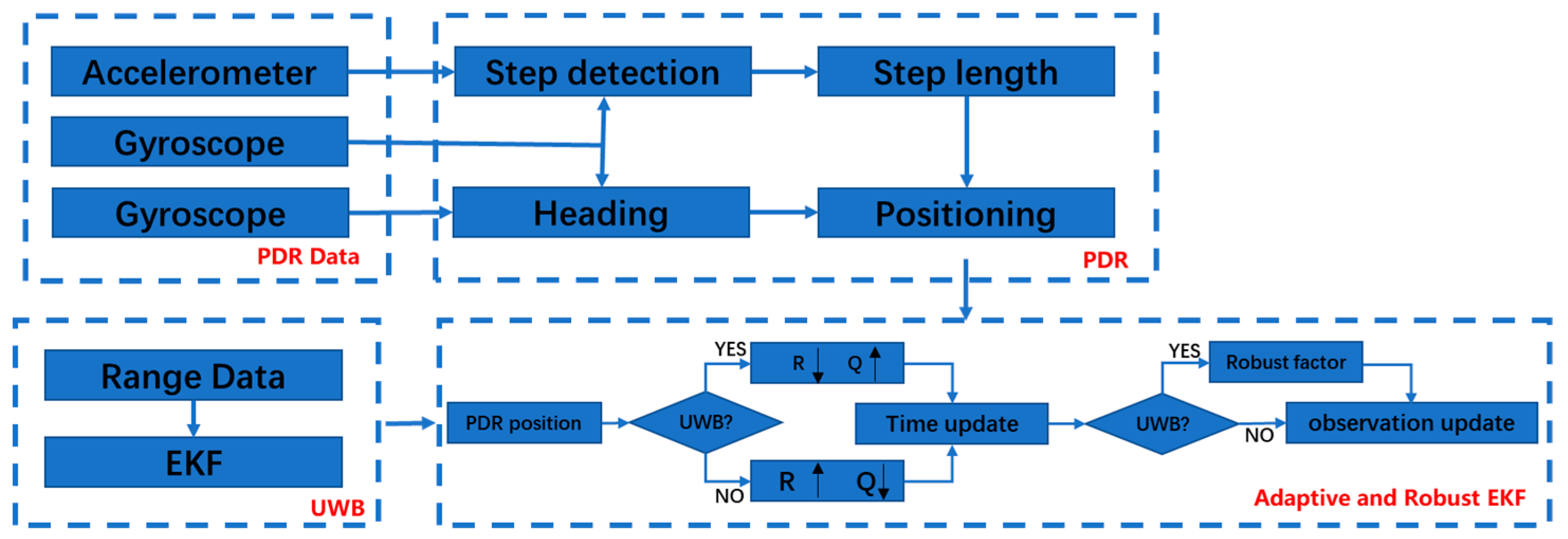
2.3. PDR/UWB Robustly Adaptive Kalman Filter Model
2.3.1. Dynamic Model
2.3.2. Observation Model
2.3.3. PDR–UWB Fusion Positioning Model Based on EKF
2.3.4. PDR/UWB Fusion Positioning Model Based on Robustly Adaptive Kalman Filter
Adaptive Kalman Filter
Robust Kalman Filter
2.4. Fusion Positioning Model with Additional Heading Constraints
- (1)
- When pedestrians are in narrow passages such as corridors and stairs, the azimuth of the narrow passages is obtained according to the indoor map, and then the measured value of the pedestrian heading is corrected to the azimuth;
- (2)
- When a pedestrian is in a wide scene, such as an indoor room, an azimuth wheel is constructed according to the pedestrian’s current position and heading. Figure 4 shows the basic principles of the course constraint based on the azimuth wheel. First, according to the pedestrian heading, the semicircular azimuth wheel is constructed at the current position and the equal angle of the azimuth wheel is determined according to the positioning accuracy required by PDR. Then, the final heading angle is determined according to the relationship between the initial heading and the equal angle of the azimuth wheel.
3. Experimental and Summary
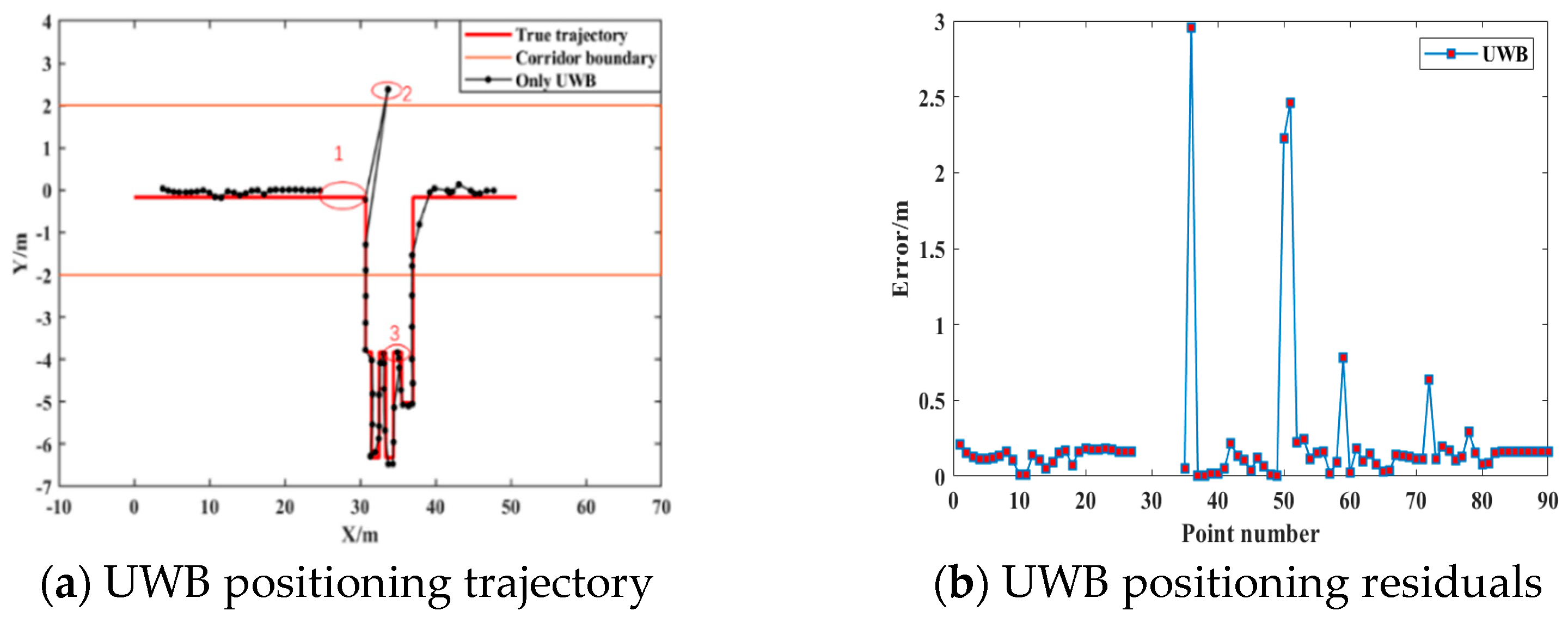
3.1. Single-Sensor Positioning
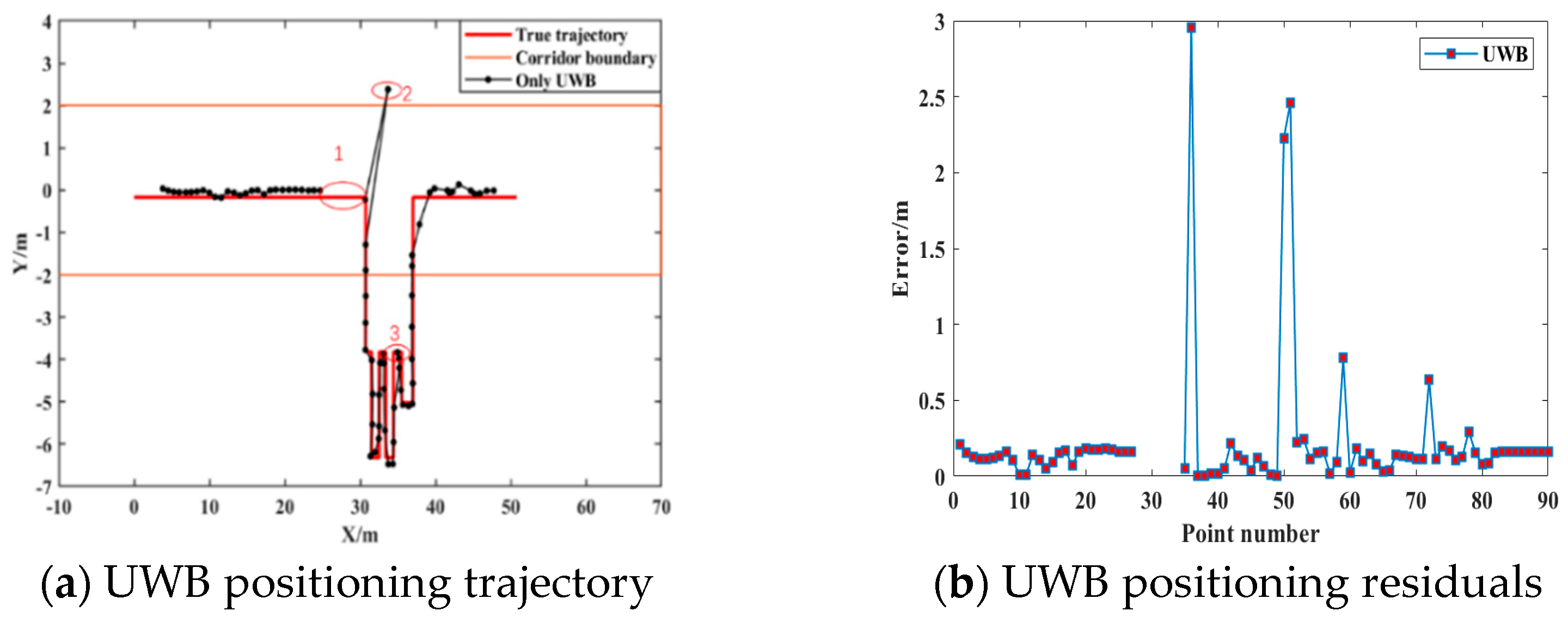
3.1.1. UWB Positioning
3.1.2. PDR Positioning
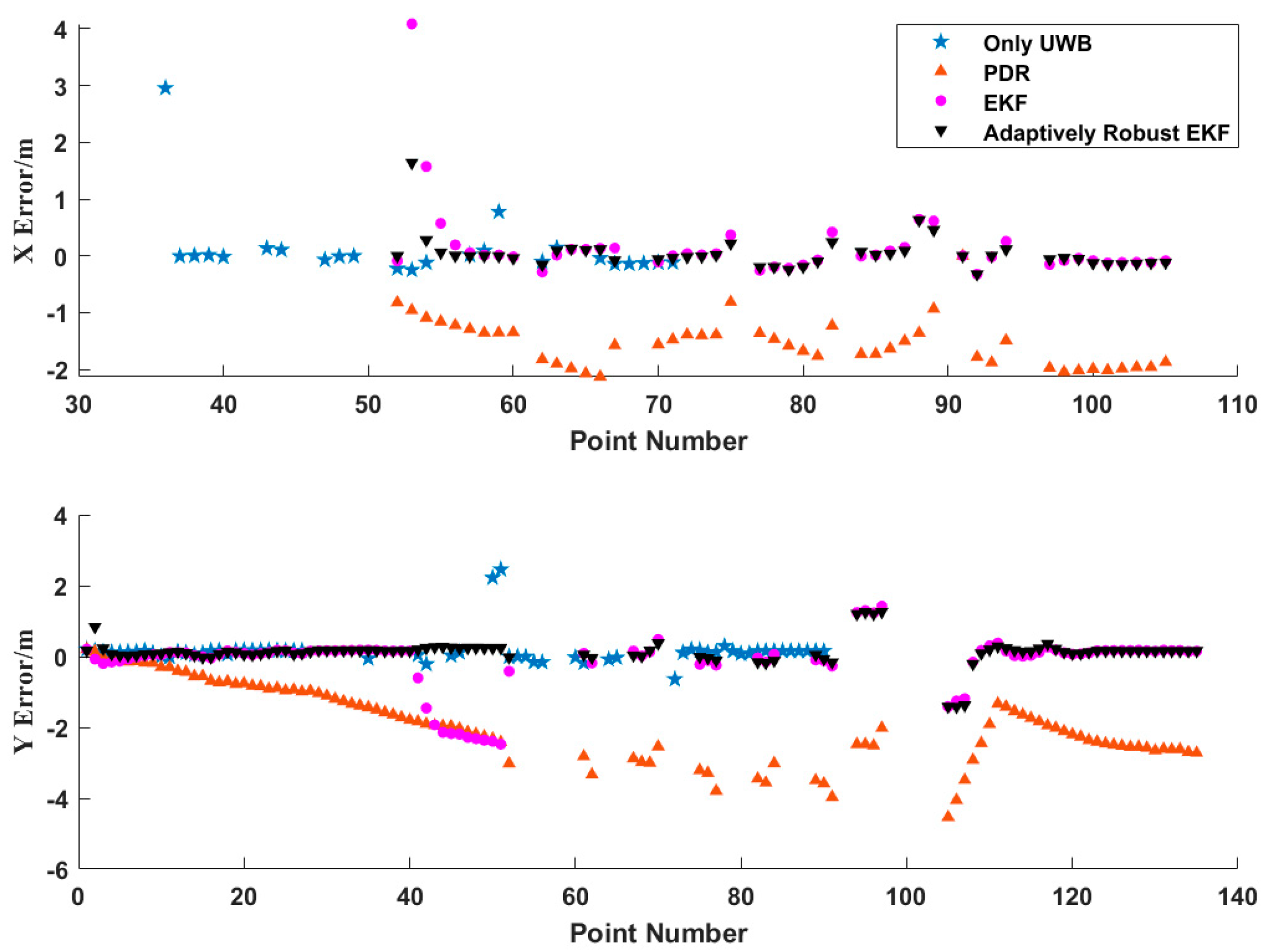
3.2. PDR/UWB Fusion Positioning
- (1)
- Pure UWB indoor positioning;
- (2)
- Pure PDR indoor positioning;
- (3)
- Indoor location of PDR/UWB based on EKF;
- (4)
- PDR/UWB indoor positioning based on robustly adaptive EKF with heading constraint.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, Z.; Liu, C.; Gao, J.; Li, X. An Improved WiFi/PDR Integrated System Using an Adaptive and Robust Filter for Indoor Localization. ISPRS Int. J. Geo-Inf. 2016, 5, 224. [Google Scholar] [CrossRef] [Green Version]
- Jang, B.G.; Choi, T.Y.; Lee, J.J. Adaptive occupancy grid mapping with clusters. Artif. Life Robot. 2006, 10, 162–165. [Google Scholar] [CrossRef]
- Guerra, A.; Guidi, F.; Dall’Ara, J.; Dardari, D. Occupancy Grid Mapping for Personal Radar Applications. In Proceedings of the IEEE Statistical Signal Processing Workshop (SSP), Freiburg im Breisgau, Germany, 10–13 June 2018; pp. 766–770. [Google Scholar]
- Yang, L.; Giannakis, G.B. Ultra-wideband communications: An idea whose time has come. IEEE Signal Process. Mag. 2004, 21, 26–54. [Google Scholar] [CrossRef]
- Dardari, D.; Conti, A.; Ferner, U.; Giorgetti, A.; Win, M.Z. Ranging with Ultrawide Bandwidth Signals in Multipath Environments. Proc. IEEE 2009, 97, 404–426. [Google Scholar] [CrossRef]
- Gezici, S. A Survey on Wireless Position Estimation. Wirel. Pers. Commun. 2008, 44, 263–282. [Google Scholar] [CrossRef]
- Guvenc, I.; Chong, C.; Watanabe, F. NLOS Identification and Mitigation for UWB Localization Systems. In Proceedings of the 2007 IEEE Wireless Communications and Networking Conference, Hong Kong, China, 11–15 March 2007; pp. 1571–1576. [Google Scholar]
- Xiao, Z.; Wen, H.; Markham, A.; Trigoni, N.; Blunsom, P.; Frolik, J. Non-Line-of-Sight Identification and Mitigation Using Received Signal Strength. IEEE Trans. Wirel. Commun. 2015, 14, 1689–1702. [Google Scholar] [CrossRef]
- Yang, X. NLOS Mitigation for UWB Localization Based on Sparse Pseudo-Input Gaussian Process. IEEE Sens. J. 2018, 18, 4311–4316. [Google Scholar] [CrossRef]
- Ridolfi, M.; Fontaine, J.; Herbruggen, B.V.; Joseph, W.; Hoebeke, J.; Depoorter, E. UWB anchor nodes self-calibration in NLOS conditions: A machine learning and adaptive PHY error correction approach. Wirel. Netw. 2001, 27, 3007–3023. [Google Scholar] [CrossRef]
- Liu, M.; Lou, X.; Jin, X.; Jiang, R.; Ye, K.; Wang, S. NLOS Identification for Localization Based on the Application of UWB. Wirel. Pers. Commun. 2021. [Google Scholar] [CrossRef]
- Cui, Z.; Gao, Y.; Hu, J.; Tian, S.; Cheng, J. LOS/NLOS Identification for Indoor UWB Positioning Based on Morlet Wavelet Transform and Convolutional Neural Networks. IEEE Commun. Lett. 2020, 25, 879–882. [Google Scholar] [CrossRef]
- Li, J.-F.; Wang, Q.-H.; Liu, X.-M.; Zhang, M.-Y. An autonomous waist-mounted pedestrian dead reckoning system by coupling low-cost MEMS inertial sensors and GPS receiver for 3D urban navigation. J. Eng. Sci. Technol. Rev. 2014, 7, 9–14. [Google Scholar] [CrossRef]
- Cho, S.Y.; Park, C.G. MEMS Based Pedestrian Navigation System. J. Navig. 2006, 59, 135–153. [Google Scholar] [CrossRef] [Green Version]
- Klingbeil, L.; Wark, T. A Wireless Sensor Network for Real-Time Indoor Localisation and Motion Monitoring. In Proceedings of the 2008 International Conference on Information Processing in Sensor Networks (ipsn 2008), St. Louis, MO, USA, 22–24 April 2008; Volume 15, pp. 39–50. [Google Scholar]
- Zuo, J.; Liu, S.; Xia, H.; Qiao, Y. Multi-phase fingerprint map based on interpolation for indoor localization using iBeacons. IEEE Sens. J. 2018, 18, 3351–3359. [Google Scholar] [CrossRef]
- Tian, Q.; Wang, K.I.-K.; Salcic, Z. A low-cost INS and UWB fusion pedestrian tracking system. IEEE Sens. J. 2019, 19, 3733–3740. [Google Scholar] [CrossRef]
- Shi, L.-F.; Wang, Y.; Liu, G.-X.; Chen, S.; Zhao, Y.-L.; Shi, Y.-F. A fusion algorithm of indoor positioning based on PDR and RSS fingerprint. IEEE Sens. J. 2018, 18, 9691–9698. [Google Scholar] [CrossRef]
- Chen, P.; Kuang, Y.; Chen, X. A UWB/Improved PDR Integration Algorithm Applied to Dynamic Indoor Positioning for Pedestrians. Sensors 2017, 17, 2065. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, J.; Hu, A.; Liu, C.; Li, X.J.S. A floor-map-aided WiFi/pseudo-odometry integration algorithm for an indoor positioning system. Sensors 2015, 15, 7096–7124. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Zhuang, Y.; Lan, H.; Zhang, P.; Niu, X.; El-Sheimy, N. WiFi-aided magnetic matching for indoor navigation with consumer portable devices. Micromachines 2015, 6, 747–764. [Google Scholar] [CrossRef] [Green Version]
- González, J.; Blanco, J.L.J.R.; Systems, A. Mobile robot localization based on Ultra-Wide-Band ranging: A particle filter approach. Robot. Auton. Syst. 2009, 57, 496–507. [Google Scholar] [CrossRef]
- Yang, Y.; He, H.; Xu, G. Adaptively robust filtering for kinematic geodetic positioning. J. Geod. 2001, 75, 109–116. [Google Scholar] [CrossRef]
- Yang, Y.; Song, L.; Xu, T. Robust estimator for correlated observations based on bifactor equivalent weights. J. Geod. 2002, 76, 353–358. [Google Scholar] [CrossRef]
- Yang, Y.; Cui, X. Adaptively robust filter with multi adaptive factors. Surv. Rev. 2008, 40, 260–270. [Google Scholar] [CrossRef]
- Yang, Y.; Gao, W. Integrated Navigation by Using Variance Component Estimates of Multi-sensor Measurements and Adaptive Weights of Dynamic Model Information. Acta Geod. Cartogr. Sin. 2004, 33, 22–26. [Google Scholar]
- Yang, Y.; Haibo, H.E.; Tianhe, X.U. Adaptive Robust Filtering for Kinematic CPS Positioning. Acta Geod. Cartogr. Sin. 2001, 30, 293–298. [Google Scholar]
- Ali, J.; Ushaq, M. A consistent and robust Kalman filter design for in-motion alignment of inertial navigation system. Measurement 2009, 42, 577–582. [Google Scholar] [CrossRef]
- Pasku, V.; Angelis, A.D.; Dionigi, M.; Moschitta, A.; Angelis, G.D.; Carbone, P.J. Analysis of Non-Ideal Effects and Performance in Magnetic Positioning Systems. IEEE Trans. Instrum. Meas. 2016, 65, 2816–2827. [Google Scholar] [CrossRef]
- Li, Z.; Wang, J.; Gao, J. An enhanced GPS/INS integrated navigation system with GPS observation expansion. J. Navig. 2016, 69, 1041–1060. [Google Scholar] [CrossRef] [Green Version]
- Gao, S.; Zhong, Y.; Li, W. Robust adaptive filtering method for SINS/SAR integrated navigation system. Aerosp. Sci. Technol. 2011, 15, 425–430. [Google Scholar] [CrossRef] [Green Version]
- Huang, G.; Zhang, Q. Real-time estimation of satellite clock offset using adaptively robust Kalman filter with classified adaptive factors. GPS Solut. 2012, 16, 531–539. [Google Scholar] [CrossRef]
- Guo, F.; Zhang, X. Adaptive robust Kalman filtering for precise point positioning. Meas. Sci. Technol. 2014, 25, 1–8. [Google Scholar] [CrossRef]
- Soken, H.E.; Hajiyev, C.; Sakai, S.I. Robust Kalman filtering for small satellite attitude estimation in the presence of measurement faults. Eur. J. Control. 2014, 20, 64–72. [Google Scholar] [CrossRef]
- Jose, E.; Adams, M.; Mullane, J.S.; Patrikalakis, N.M. Predicting Millimeter Wave Radar Spectra for Autonomous Navigation. IEEE Sens. J. 2010, 10, 960–971. [Google Scholar] [CrossRef]
- Jose, E.; Adams, M.D. An augmented state SLAM formulation for multiple line-of-sight features with millimetre wave RADAR. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005. [Google Scholar]
- Li, Z.; Zhao, L.; Qin, C.; Wang, Y. WiFi/PDR integrated navigation with robustly constrained Kalman filter. Meas. Sci. Technol. 2020, 31, 084002. [Google Scholar] [CrossRef]
- Liu, F.; Wang, J.; Zhang, J.; Han, H. An Indoor Localization Method for Pedestrians Base on Combined UWB/PDR/Floor Map. Sensors 2019, 19, 2578. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guo, S.; Zhang, Y.; Gui, X.; Han, L. An Improved PDR/UWB Integrated System for Indoor Navigation Applications. IEEE Sens. J. 2020, 20, 8046–8061. [Google Scholar] [CrossRef]
- Tong, H.; Xin, N.; Su, X.; Chen, T.; Wu, J. A Robust PDR/UWB Integrated Indoor Localization Approach for Pedestrians in Harsh Environments. Sensors 2020, 20, 193. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chang, G. Kalman filter with both adaptivity and robustness. J. Process Control 2014, 24, 81–87. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scheme | X | Y | Plane |
|---|---|---|---|
| Only UWB | 0.633 | 0.453 | 0.778 |
| PDR | 1.582 | 2.104 | 2.632 |
| EKF | 0.681 | 0.792 | 1.045 |
| Adaptively Robust EKF | 0.294 | 0.434 | 0.524 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, D.; Zhang, J.; Wang, J.; Cui, X.; Liu, F.; Zhang, Y. Robustly Adaptive EKF PDR/UWB Integrated Navigation Based on Additional Heading Constraint. Sensors 2021, 21, 4390. https://doi.org/10.3390/s21134390
Yuan D, Zhang J, Wang J, Cui X, Liu F, Zhang Y. Robustly Adaptive EKF PDR/UWB Integrated Navigation Based on Additional Heading Constraint. Sensors. 2021; 21(13):4390. https://doi.org/10.3390/s21134390
Chicago/Turabian StyleYuan, Debao, Jian Zhang, Jian Wang, Ximin Cui, Fei Liu, and Yalei Zhang. 2021. "Robustly Adaptive EKF PDR/UWB Integrated Navigation Based on Additional Heading Constraint" Sensors 21, no. 13: 4390. https://doi.org/10.3390/s21134390
APA StyleYuan, D., Zhang, J., Wang, J., Cui, X., Liu, F., & Zhang, Y. (2021). Robustly Adaptive EKF PDR/UWB Integrated Navigation Based on Additional Heading Constraint. Sensors, 21(13), 4390. https://doi.org/10.3390/s21134390