
Machine Learning Based Object Classification and Identification Scheme Using an Embedded Millimeter-Wave Radar Sensor



Abstract
:1. Introduction
2. Mathematical and Simulation Analyses
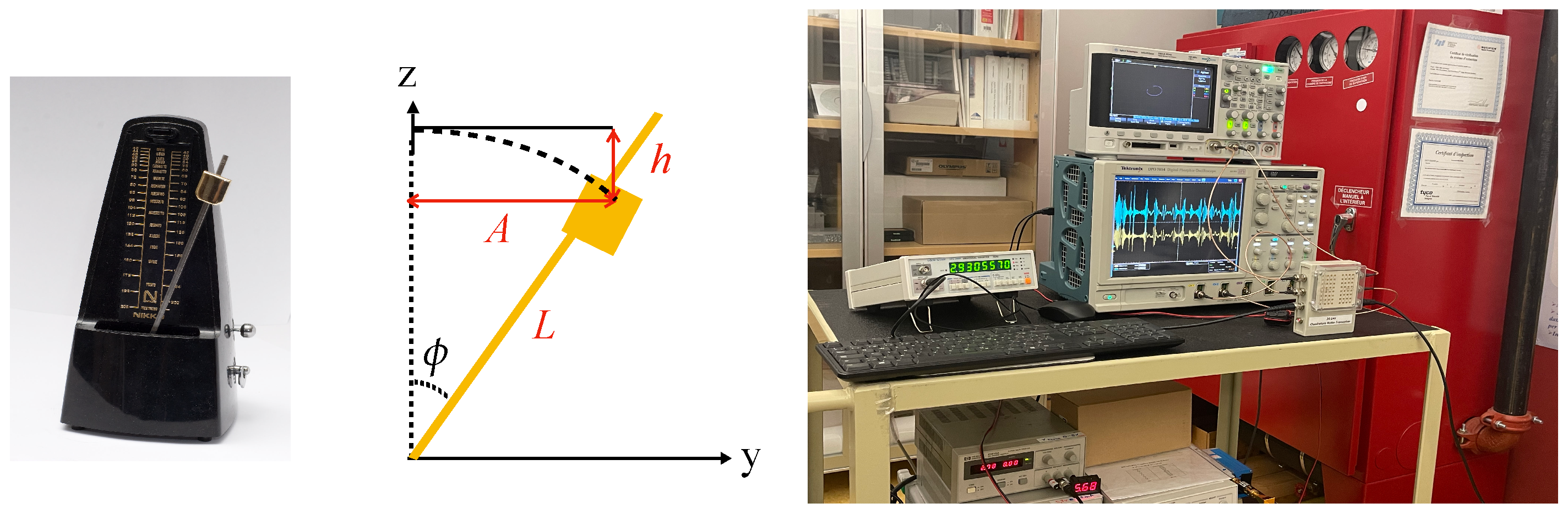
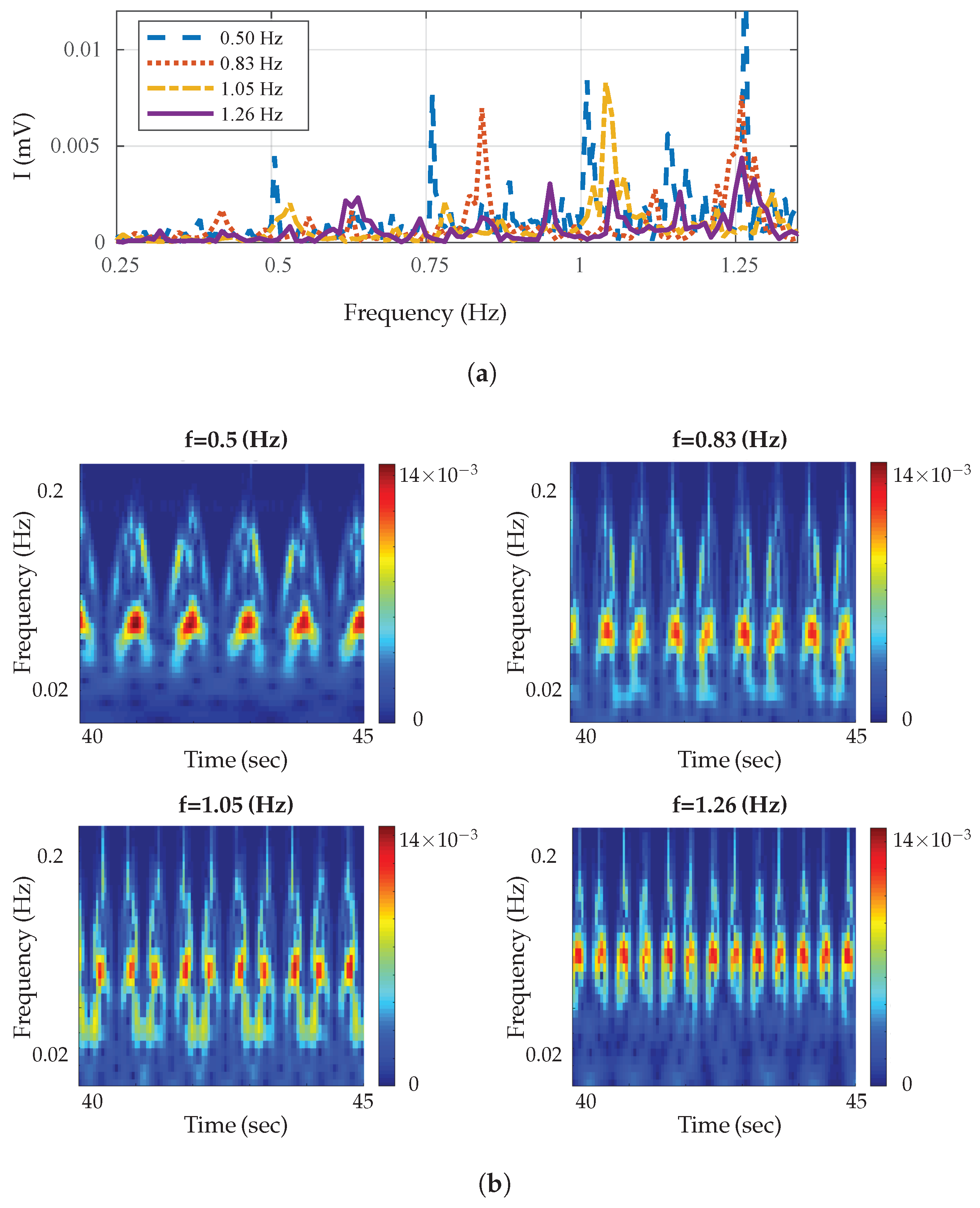
3. Experimental Verifications
4. Supervised Machine Learning
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chipengo, U. Full Physics Simulation Study of Guardrail Radar-Returns for 77 GHz Automotive Radar Systems. IEEE Access 2018, 6, 70053–70060. [Google Scholar] [CrossRef]
- Geiger, M.; Waldschmidt, C. 160-GHz Radar Proximity Sensor With Distributed and Flexible Antennas for Collaborative Robots. IEEE Access 2019, 7, 14977–14984. [Google Scholar] [CrossRef]
- Sadreazami, H.; Bolic, M.; Rajan, S. CapsFall: Fall Detection Using Ultra-Wideband Radar and Capsule Network. IEEE Access 2019, 7, 55336–55343. [Google Scholar] [CrossRef]
- Zhao, H.; Hong, H.; Miao, D.; Li, Y.; Zhang, H.; Zhang, Y.; Li, C.; Zhu, X. A Noncontact Breathing Disorder Recognition System Using 2.4-GHz Digital-IF Doppler Radar. IEEE J. Biomed. Health Inform. 2019, 23, 208–217. [Google Scholar] [CrossRef]
- Vaishnav, P.; Santra, A. Continuous Human Activity Classification With Unscented Kalman Filter Tracking Using FMCW Radar. IEEE Sens. Lett. 2020, 4, 7001704. [Google Scholar] [CrossRef]
- Weiß, J.; Santra, A. One-Shot Learning for Robust Material Classification Using Millimeter-Wave Radar System. IEEE Sens. Lett. 2018, 2, 7001504. [Google Scholar] [CrossRef]
- Wang, P.; Lin, J.; Wang, F.; Xiu, J.; Lin, Y.; Yan, N.; Xu, H. A Gesture Air-Writing Tracking Method that Uses 24 GHz SIMO Radar SoC. IEEE Access. 2020, 8, 152728–152741. [Google Scholar] [CrossRef]
- Arab, H.; Dufour, S.; Moldovan, E.; Akyel, C.; Tatu, S.O. Accurate and Robust CW-LFM Radar Sensor: Transceiver Front-End Design and Implementation. IEEE Sens. J. 2019, 19, 1943–1950. [Google Scholar] [CrossRef]
- Arab, H.; Chioukh, L.; Ardakani, M.D.; Dufour, S.; Tatu, S.O. Early-Stage Detection of Melanoma Skin Cancer Using Contactless Millimeter-Wave Sensors. IEEE Sens. J. 2020, 20, 7310–7317. [Google Scholar] [CrossRef]
- Arab, H.; Dufour, S.; Moldovan, E.; Akyel, C.; Tatu, S.O. A 77 GHz Six-Port Sensor for Accurate Near Field Displacement and Doppler Measurements, Special Issue Recent Advances in Front-End Designs for Sensors and Wireless Networks. Sens. J. 2018, 18, 2565. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Benchikh, S.; Arab, H.; Tatu, S.O. A Novel Millimeter Wave Radar Sensor for Medical Signal Detection. In Proceedings of the IEEE International Microwave Biomedical Conference (IMBioC), Philadelphia, PA, USA, 14–15 June 2018; pp. 142–144. [Google Scholar] [CrossRef]
- Robertson, D.A.; Cassidy, S.L. Micro-doppler and vibrometry at millimeter and sub-millimeter wavelengths. Proc. SPIE 2013. [Google Scholar] [CrossRef]
- Rong, Y.; Srinivas, S.; Venkataramani, A.; Bliss, W. UWB Radar Vibrometry: An RF Microphone. In Proceedings of the 53rd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 3–6 November 2019; pp. 1066–1070. [Google Scholar] [CrossRef]
- Sligar, A.P. Machine Learning-Based Radar Perception for Autonomous Vehicles Using Full Physics Simulation. IEEE Access 2020, 8, 51470–51476. [Google Scholar] [CrossRef]
- Li, H.; Liang, X.; Shrestha, A.; Liu, Y.; Heidari, H.; Le Kernec, J.; Fioranelli, F. Hierarchical Sensor Fusion for Micro-Gesture Recognition With Pressure Sensor Array and Radar. IEEE J. Electromagn. Microwaves Med. Biol. 2020, 4, 225–232. [Google Scholar] [CrossRef]
- Thornton, C.E.; Kozy, M.A.; Buehrer, R.M.; Martone, A.F.; Sherbondy, K.D. Deep Reinforcement Learning Control for Radar Detection and Tracking in Congested Spectral Environments. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 1335–1349. [Google Scholar] [CrossRef]
- Sun, Z.; Hu, K.; Hu, T.; Liu, J.; Zhu, K. Fast Multi-Label Low-Rank Linearized SVM Classification Algorithm Based on Approximate Extreme Points. IEEE Access 2018, 6, 42319–42326. [Google Scholar] [CrossRef]
- Guo, Y.; Jia, X.; Paull, D. Effective Sequential Classifier Training for SVM-Based Multitemporal Remote Sensing Image Classification. IEEE Trans. Image Process. 2018, 27, 3036–3048. [Google Scholar] [CrossRef] [Green Version]
- Ding, W. SVM-Based Feature Selection for Differential Space Fusion and Its Application to Diabetic Fundus Image Classification. IEEE Access 2019, 7, 149493–149502. [Google Scholar] [CrossRef]
- Pavy, A.; Rigling, B. SV-Means: A Fast SVM-Based Level Set Estimator for Phase-Modulated Radar Waveform Classification. IEEE J. Sel. Top. Signal Process. 2018, 12, 191–201. [Google Scholar] [CrossRef]
- Shu, W.; Cai, K. A SVM Multi-Class Image Classification Method Based on DE and KNN in Smart City Management. IEEE Access 2019, 7, 132775–132785. [Google Scholar] [CrossRef]
- Wu, J.; Yang, H. Linear Regression-Based Efficient SVM Learning for Large-Scale Classification. IEEE Trans. Neural Networks Learn. Syst. 2015, 26, 2357–2369. [Google Scholar] [CrossRef]
- Zhao, Z.; Song, Y.; Cui, F.; Zhu, J.; Song, C.; Xu, Z.; Ding, K. Point Cloud Features-Based Kernel SVM for Human-Vehicle Classification in Millimeter Wave Radar. IEEE Access 2020, 8, 26012–26021. [Google Scholar] [CrossRef]
- Li, H.; Mehul, A.; Kernec, J.L.; Gurbuz, S.Z.; Fioranelli, F. Sequential Human Gait Classification With Distributed Radar Sensor Fusion. IEEE Sens. J. 2021, 21, 7590–7603. [Google Scholar] [CrossRef]
- Yeary, M.B.; Nemati, S.; Yu, T.; Wang, Y.; Zhai, Y. A Support-Vector-Machine-Based Approach to RF Sensor Spectral Signature Classifications. IEEE Trans. Instrum. Meas. 2009, 58, 221–228. [Google Scholar] [CrossRef]
- Skaria, S.; Al-Hourani, A.; Evans, R.J. Deep-Learning Methods for Hand-Gesture Recognition Using Ultra-Wideband Radar. IEEE Access 2020, 8, 203580–203590. [Google Scholar] [CrossRef]
- Jia, L.; Li, M.; Wu, Y.; Zhang, P.; Chen, H.; An, L. Semisupervised SAR Image Change Detection Using a Cluster-Neighborhood Kernel. IEEE Geosci. Remote. Sens. Lett. 2014, 11, 1443–1447. [Google Scholar] [CrossRef]
- Kumar, V.; Steinbach, M.; Tan, P.N. Introduction to Data Mining; Pearson, Addison Wesley: London, UK, 2006. [Google Scholar]
- Hong, J.H.; Bae, C.S. A probabilistic multi-class strategy of one-vs.-rest support vector machines for cancer classification. Neuro Comput. 2008, 71, 3275–3281. [Google Scholar] [CrossRef]
- Hsu, C.; Chang, C.; Lin, C. A Practical Guide to Support Vector Classification; Technical Report; Department of Computer Science, National Taiwan University: Taipei, Taiwan, 2010. [Google Scholar]
- Chu, J.; Guo, Z.; Leng, L. Object Detection Based on Multi-Layer Convolution Feature Fusion and Online Hard Example Mining. IEEE Access 2018, 6, 19959–19967. [Google Scholar] [CrossRef]
- Cretu, A.; Petriu, E.M.; Patry, G.G. Neural-network-based models of 3-D objects for virtualized reality: A comparative study. IEEE Trans. Instrum. Meas. 2006, 55, 99–111. [Google Scholar] [CrossRef]
- Zhu, H.; Lin, N.; Leung, H.; Leung, R.; Theodoidis, S. Target Classification From SAR Imagery Based on the Pixel Grayscale Decline by Graph Convolutional Neural Network. IEEE Sens. Lett. 2020, 4, 1–4. [Google Scholar] [CrossRef]
- Bu, K.; He, Y.; Jing, X.; Han, J. Adversarial Transfer Learning for Deep Learning Based Automatic Modulation Classification. IEEE Signal Process. Lett. 2020, 27, 880–884. [Google Scholar] [CrossRef]
- Anderson, M.; Rogers, R. Micro-Doppler analysis of multiple frequency continuous wave radar signatures. Proc. SPIE 2007. [Google Scholar] [CrossRef]
- Tahmoush, T.; Silvious, J.; Burke, E. A radar unattended ground sensor with micro-Doppler capabilities for false alarm reduction. In Unmanned/Unattended Sensors and Sensor Networks VII; Carapezza, E.M., Ed.; Curran Associates, Inc.: Red Hook, NY, USA, 2010; pp. 1–14. [Google Scholar]
- Kim, Y.; Ling, H. Human activity classification based on micro-Doppler signatures using a support vector machine. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1328–1337. [Google Scholar]
- Javier, R.; Kim, Y. Application of linear predictive coding for human activity classification based on micro-Doppler signatures. IEEE Geosci. Remote Sens. Lett. 2013, 10, 781–785. [Google Scholar] [CrossRef]
- Lyonnet, B.; Ioana, C.; Amin, M.G. Human gait classification us- ing microDoppler time–frequency signal representations. In Proceedings of the 2010 IEEE Radar Conference, Arlington, VA, USA, 10–14 May 2010; pp. 915–919. [Google Scholar]
- Fairchild, D.P.; Narayanan, N.M. Classification of human motions using empirical mode decomposition of human micro-Doppler signatures. IET Radar Sonar Navig. 2014, 8, 425–434. [Google Scholar] [CrossRef]
- Milandr Integrated Circuit Design Center, Electronic Device, Zelenograd, Moscow. Available online: https://www.milandr.com (accessed on 1 September 2018).
- Droitcour, A.D.; Boric-Lubecke, O.; Lubecke, V.; Lin, J.; Kovacs, G. Range Correlation and I/Q performance benefits in single chip silicon Doppler radars for non-contact cardiopulmonary signs sensing. IEEE Trans. Microw. Theory Technol. 2004, 52, 838–848. [Google Scholar] [CrossRef]
- A.V.S. How Does a Metronome Allow Such a Wide Range of Tempos in Such a Short Distance? Physics Stack Exchange. 2018. Available online: https://physics.stackexchange.com/users/180269/a-v-s (accessed on 1 September 2018).
- Li, C.; Xiao, Y.; Lin, J. Experiment and Spectral Analysis of a Low-Power Ka-Band Heartbeat Detector Measuring from Four Sides of a Human Body. IEEE Trans. Microw. Theory Tech. 2006, 54, 4464–4471. [Google Scholar] [CrossRef]
- Venot, Y.; Wiesbeck, W. 76.5 GHz radar sensor for contact-free distance measurement with micrometer accuracy. Proc. IEEE Sens. 2003, 1, 216–221. [Google Scholar]
- Boser, B.E.; Guyon, I.M.; Vapnik, V. A training algorithm for optimal margin classifiers. In In Proceedings of the Fifth Annual Workshop on Computational Learning Theory, Pittsburgh, PA, USA, 27–29 July 1992; pp. 144–152. [Google Scholar]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Vapnik, V.N. The Nature of Statistical Learning Theory; Springer: New York, NY, USA, 1995. [Google Scholar]
- Tsangaratos, P.; Ilia, I. Applying Machine Learning Algorithms in Landslide Susceptibility Assessments. In Handbook of Neural Computation; Elsevier: Cambridge, MA, USA, 2017; pp. 433–457. [Google Scholar]
- Alpaydin, E. Introduction to Machine Learning (Adaptive Computation and Machine Learning); MIT Press: Cambridge, MA, USA, 2004. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | Value | Radar Prototype |
|---|---|---|
| Frequency Range | 23.5–24.5 GHz |  |
| Horizontal −3 dB beamwidth | ||
| Vertical −3 dB beamwidth | ||
| Side Lobe Level (H-plane) | −29 dB | |
| Side Lobe Level (E-plane) | −11 dB | |
| Tx Gain | 17 dBi | |
| Rx Gain | 16 dB | Antenna radiation patterns |
| Ambient Temperature Range | −25 to +85 C |  |
| Storage Temperature Range | −40 to +105 C | |
| IF 1st Cascade | +20 dB | |
| IF 2nd Cascade | +14 dB | |
| Deviation | 1000 MHz (0 to +5 V) |
| SVM Methods: RFB kernel, (C = 1, and ) | |||
|---|---|---|---|
| OAA | OAO | DAG | |
| Accuracy | 96.32 | 96.62 | 96.61 |
| F1-score | 96.28 | 96.55 | 96.59 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arab, H.; Ghaffari, I.; Chioukh, L.; Tatu, S.; Dufour, S. Machine Learning Based Object Classification and Identification Scheme Using an Embedded Millimeter-Wave Radar Sensor. Sensors 2021, 21, 4291. https://doi.org/10.3390/s21134291
Arab H, Ghaffari I, Chioukh L, Tatu S, Dufour S. Machine Learning Based Object Classification and Identification Scheme Using an Embedded Millimeter-Wave Radar Sensor. Sensors. 2021; 21(13):4291. https://doi.org/10.3390/s21134291
Chicago/Turabian StyleArab, Homa, Iman Ghaffari, Lydia Chioukh, Serioja Tatu, and Steven Dufour. 2021. "Machine Learning Based Object Classification and Identification Scheme Using an Embedded Millimeter-Wave Radar Sensor" Sensors 21, no. 13: 4291. https://doi.org/10.3390/s21134291
APA StyleArab, H., Ghaffari, I., Chioukh, L., Tatu, S., & Dufour, S. (2021). Machine Learning Based Object Classification and Identification Scheme Using an Embedded Millimeter-Wave Radar Sensor. Sensors, 21(13), 4291. https://doi.org/10.3390/s21134291