
Systematic Literature Review of Realistic Simulators Applied in Educational Robotics Context


 ,
,  ,
, 

Abstract
1. Introduction
- Simulate a variety of physical systems (rigid body dynamics, soft body dynamics, fluid dynamics, etc.);
- Apply those systems to 3D objects and environments;
- Work in tandem with other software systems to create a cohesive experience.
2. Method
2.1. Planning the Review
- RQ1: In the context of educational robotics, are there any realistic simulators capable of simulating any robot prototype?
- RQ2: Are these simulators capable of simulating the robot’s sensors and/or actuators?
- RQ3: Is such simulation based on physics engines?
- Population (P): Robotics Simulators;
- Intervention (I): Realistic Robotics Simulators;
- Comparison (C): Compare the already existing robotics simulators;
- Outcome (O): Understand the ways of simulate realistic robots, being able to simulate micro-controllers, sensors and actuators as well;
- Context (C): Educational Robotics.
2.2. Inclusion and Exclusion Criteria
- IC1: The papers are written in English; (AND)
- IC2: The papers are reported in peer reviewed conferences or journals or technical reports; (AND)
- IC3: The papers that use any kind of simulator, OR simulate realistic robotics, OR simulate sensors OR Actuators.
- EC1: The papers are NOT written in English; (OR)
- EC2: The papers are NOT reported in peer reviewed conferences or journals or technical reports; (OR)
- EC3: The papers that do NOT use any kind of simulator, OR simulate realistic robotics, OR simulate sensors OR Actuators.
2.3. Search Methodology
- They are well-known databases in this research field;
- They are relevant databases in the research theme of this literature review;
- It is possible to use a search string as well as Boolean operators to improve the results of the search process.
(“educational robotics” OR “educative robotics” OR “robotics and education”) AND (“realistic simulators” OR “prototype” OR “prototyping”)
- ACM Digital Library: For the ACM Digital Library (http://portal.acm.org, accessed on 8 June 2021) the Advanced Search resource was used, where the search equation was split into two parts placed in two separated search fields; the query syntax returned from this database is is shown below:[[All: “educational robotics”] OR [All: “educative robotics”] OR [All: “robotics and education”]] AND [[All: “realistic simulators”] OR [All: “prototype”] OR [All: “prototyping”]]
- IEEE Digital Library: In the IEEE Digital Library (http://ieeexplore.ieee.org, accessed on 8 June 2021), we used the simple search bar on the web site, pasting the search strings there.
- ISI Web of Science: In the ISI Web of Science (http://www.isiknowledge.com, accessed on 8 June 2021) he query terms were posted in the basic search tab to obtain the papers.
- ScienceDirect: For ScienceDirect (http://www.sciencedirect.com, accessed on 8 June 2021), the use of the website was very straight forward; the equation was pasted in the search field to obtain the results from the database.
- Scopus: In the Scopus database (http://www.scopus.com, accessed on 8 June 2021), the use of advanced search was needed in order to obtain the maximum possible results. The entered query strings used were:ALL(“Educational Robotics” OR “Educative Robotics” OR “Robotics and Education”) AND ALL(“Realistic Simulators” OR “Prototype” OR “Prototyping”).
- Springer Link: For the Springer Link database (http://link.springer.com, accessed on 8 June 2021), the query string was used in the simple search bar on the website.
2.4. Quality Criteria
Data Extraction Form
3. Results
- First, the results retrieved from the initial search were 559 papers in total, distributed in 41 citations from the ACM Digital Library, 14 from the IEEE Digital Library, 22 papers from ISI Web of Science, 92 works from ScienceDirect, 204 citations from Scopus and 186 from Springer Link.
- After the search, all these references were uploaded and organized into the Parsifal (https://parsif.al/, accessed on 8 June 2021) (the main tool applied to conduct this SLR) and it detected 60 duplicated records that were consequently removed.
- As result, 499 works were retrieved from the previous step and they were analyzed through the reading of their titles, keywords and abstracts and applying the Inclusion and Exclusion Criteria. From this process, 434 articles were excluded because they did not meet the requirements, leading us to the next phase, with 65 papers.
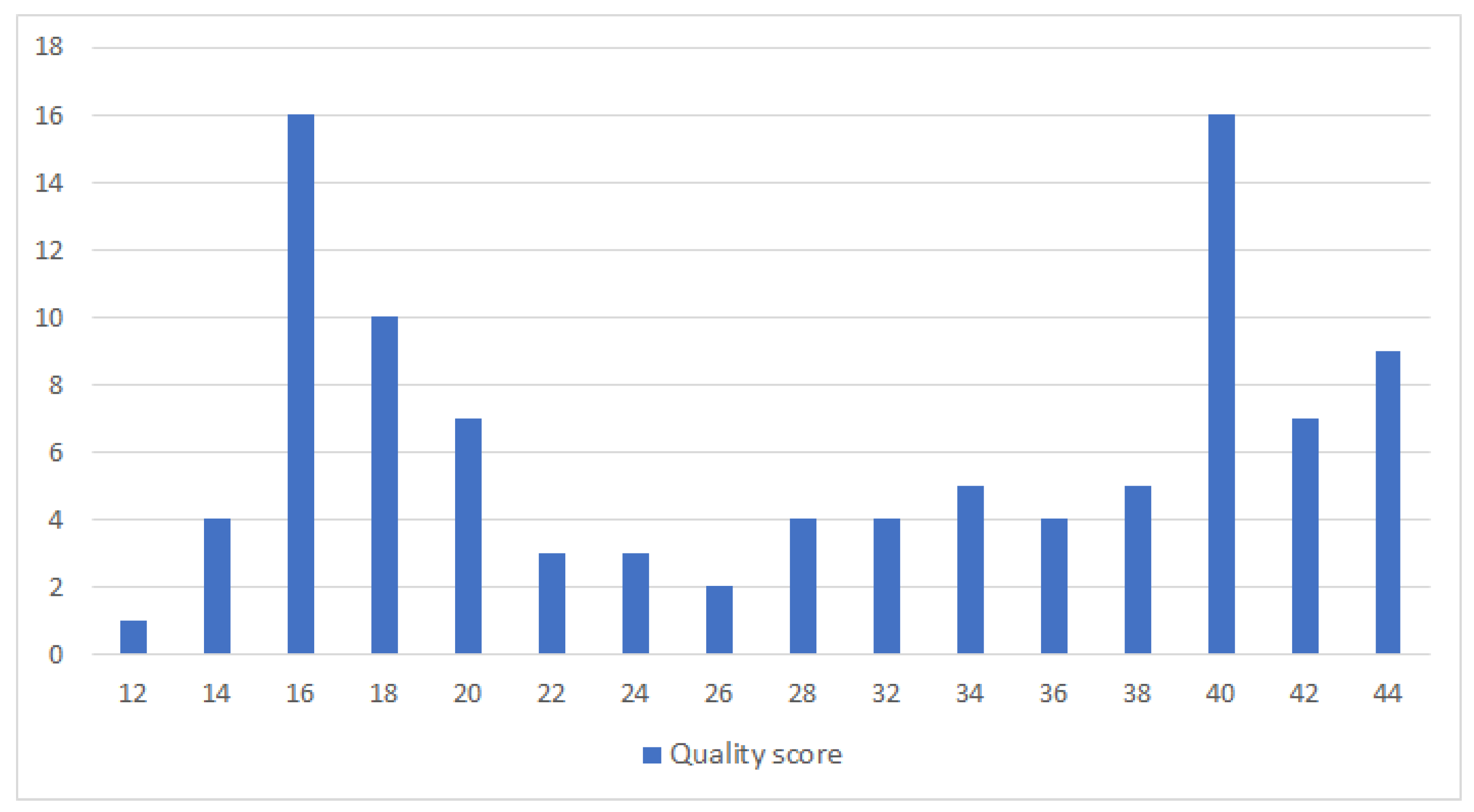
- The accepted papers were read in detail. When each article was read, it was scored regarding its quality, applying the quality assessment questions described in Section 2.4. In addition, while reading these works, their references were carefully checked in order to find new articles (as an alternative source) that could address the research question, resulting in 35 new reports (on 7 December 2020). Figure 3 shows the amount of obtained articles per source and year, and those which were accepted per source. A relevant issue to take into account is that none of the selected papers were from the Web of Science or the IEEE Digital library data sources, so these databases are not shown in the graphic.
- After the evaluation of the papers’ quality, 15 papers that scored higher than or equal to 30 were selected, adding to them the 35 obtained from the reference checking of the previous phase. This resulted in a total of 50 selected works with which to compose the present review, which can be seen distributed by publication year and source in the Figure.
4. Discussion and Results
4.1. Simulators Features
4.2. Exception Points
- The first exception point to be discussed in the Table 3 is the Exception 1 found in the paper [61]. This paper has as its title: “Mathematical modelling, simulation and experimental verification of a Scara robot”, from Das, M. T., & Dülger, L. C. The authors developed a complete mathematical model of the Scara robot (Serpent 1 type robot), but the simulations carried out during the study were made using a numerical simulator such as MATLAB, and also they do not show how or which simulations were conducted. However, this paper could be replicated in another simulator such as the V-REP or Sim-Two, for example.
- The next point that stands out as an exception (marked as Exception 2 in Table 3), is the paper [75], Cervera, Enric, et al., “The robot programming network”. The authors present a system that allows the users to learn robotics topics in a virtual environment using a web-based laboratory with real robots or 2D/3D simulators. In this case, the system gathers tools that are fundamental for robotics learning such as learning the Robot Operating System use, including the possibility to try out in realistic and non-realistic simulators that are embedded into this web-based system.
- Another reference that is an exception is [105], where the authors design a simulator with a realistic visualization of the head of IRYS robot. Although the simulator, made using the Unreal Engine, is realistic enough in what concern the robot motion and appearance, it is just to simulate this robot. For that reason it was categorized as an exception.
- The last exception is the paper [106], in which the authors present an architecture for the management of a fleet of cleaning robots and, for this purpose, they design a simulator to evaluate its framework. The simulator has is called CleanSim and simulates map dirtiness; in this way, the authors can test their algorithm to improve the efficiency of the cleaning method. However, this is an exception for not being a realistic simulator based on a physics engine.
4.3. Physics Engines
4.4. Robot Operating System-ROS
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| SLR | Systematic Literature Review |
| PICOC | Population, Intervention, Comparison, Outcomes, Context |
| PRISMA | Preferred Reporting Items for Systematic Reviews and Meta-Analyses |
| RQ | Research Question |
| IC | Inclusion Criteria |
| EC | Exclusion Criteria |
| Quality Question | |
| DQ | Data Question |
| ROS | Robot Operating System |
Appendix A. Data Repository
References
- Žlajpah, L. Simulation in robotics. Math. Comput. Simul. 2008, 79, 879–897. [Google Scholar] [CrossRef]
- Reckhaus, M.; Hochgeschwender, N.; Paulus, J.; Shakhimardanov, A.; Kraetzschmar, G.K. An overview about simulation and emulation in robotics. Proc. Simpar 2010, 365–374. [Google Scholar]
- Williams, E.J.; Ülgen, O.M. Simulation Applications in the Automotive Industry. In Use Cases of Discrete Event Simulation; Bangsow, S., Ed.; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Xu, J.; Huang, E.; Hsieh, L.; Lee, L.H.; Jia, Q.-S.; Chen, C.-H. Simulation optimization in the era of Industrial 4.0 and the Industrial Internet. J. Simul. 2016, 10, 310–320. [Google Scholar] [CrossRef]
- Currie, C.S.; Fowler, J.W.; Kotiadis, K.; Monks, T.; Onggo, B.S.; Robertson, D.A.; Tako, A.A. How simulation modelling can help reduce the impact of COVID-19. J. Simul. 2020, 14, 83–97. [Google Scholar] [CrossRef]
- Boeing, A.; Bräunl, T. Evaluation of real-time physics simulation systems. In Proceedings of the 5th International Conference on Computer Graphics and Interactive Techniques in Australia and Southeast Asia, Perth, Australia, 1–4 December 2007; pp. 281–288. [Google Scholar]
- Hummel, J.; Wolff, R.; Stein, T.; Gerndt, A.; Kuhlen, T. An evaluation of open source physics engines for use in virtual reality assembly simulations. In International Symposium on Visual Computing; Springer: Berlin/Heidelberg, Germany, 2012; pp. 346–357. [Google Scholar]
- Bourg, D.M.; Bywalec, B. Physics for Game Developers: Science, Math, and Code for Realistic Effects; O’Reilly Media, Inc.: Newton, MA, USA, 2013. [Google Scholar]
- Millington, I. Game Physics Engine Development; CRC Press: Boca Raton, FL, USA, 2007. [Google Scholar]
- Ferrada-Ferrada, C.; Carrillo-Rosúa, J.; Díaz-Levicoy, D.; Silva-Díaz, F. Robotics from STEM areas in Primary School: A Systematic Review. Educ. Knowl. Soc. 2020. [Google Scholar]
- Conde, M.Á.; Rodríguez-Sedano, F.J.; Fernández-Llamas, C.; Gonçalves, J.; Lima, J.; García-Peñalvo, F.J. Fostering STEAM through Challenge Based Learning, Robotics and Physical Devices: A systematic mapping literature review. Comput. Appl. Eng. Educ. 2021, 29, 46–65. [Google Scholar] [CrossRef]
- García-Holgado, A.; Marcos-Pablos, S.; García-Peñalvo, F.J. Guidelines for performing Systematic Research Projects Reviews. Int. J. Interact. Multimed. Artif. Intell. 2020, 6, 136–144. [Google Scholar] [CrossRef]
- Kitchenham, B. Procedures for Performing Systematic Reviews; Keele University: Keele, UK, 2004; Volume 33, pp. 1–26. [Google Scholar]
- Kitchenham, B.; Charters, S. Guidelines for Performing Systematic Literature Reviews in Software Engineering; EBSE: Menen, Belgium, 2007. [Google Scholar]
- Kitchenham, B.A.; Budgen, D.; Brereton, P. Evidence-Based Software Engineering and Systematic Reviews; CRC Press: Boca Raton, FL, USA, 2015; Volume 4. [Google Scholar]
- Dyba, T.; Dingsoyr, T.; Hanssen, G.K. Applying systematic reviews to diverse study types: An experience report. In Proceedings of the First International Symposium on Empirical Software Engineering and Measurement (ESEM 2007), Madrid, Spain, 20–21 September 2007; pp. 225–234. [Google Scholar]
- Cooper, H.M. Synthesizing Research: A Guide for Literature Reviews; Sage: Beijing, China, 1998; Volume 2. [Google Scholar]
- Orwin, R.G.; Cooper, I.H.; Hedges, L.V. The Handbook of Research Synthesis; Russell Sage Foundation: New York, NY, USA, 1994; pp. 139–162. [Google Scholar]
- Dybå, T.; Kampenes, V.B.; Sjøberg, D.I.K. A Systematic Review of Statistical Power in Software Engineering Experiments. Inf. Softw. Technol. 2006, 48, 745–755. [Google Scholar] [CrossRef]
- Higgins, J.P.T.; Green, S. (Eds.) Cochrane Handbook for Systematic Reviews of Interventions 4.2.5 [updated May 2005]. In The Cochrane Library; Issue 3; John Wiley & Sons, Ltd.: Chichester, UK, 2005. [Google Scholar]
- Mulrow, C.; Cook, D. (Eds.) Systematic Reviews: Synthesis of Best Evidence for Health Care Decisions; Am. College of Physicians: Philadelphia, PA, USA, 1998. [Google Scholar]
- Petticrew, M.; Roberts, H. Systematic Reviews in the Social Sciences: A Practical Guide; Blackwell: Oxford, UK, 2006. [Google Scholar]
- Popay, J.; Roberts, H.; Sowden, A.; Petticrew, M.; Britten, N.; Arai, L.; Roen, K.; Rodgers, M. Developing guidance on the conduct of narrative synthesis in systematic reviews. J. Epidemiol. Community Health 2005, 59 (Suppl. 1), A7. [Google Scholar]
- Jpt Chh, G.S. Cochrane Handbook for Systematic Reviews of Interventions Version 5.1. 0; [Updated March 2011]; The Cochrane Collaboration: London, UK, 2011. [Google Scholar]
- La, A.H.; Szabo, I.; Le Brun, L.; Owen, I.; Fletcher, G.; Hill, M. An evidence-based approach to scoping reviews. Electron. J. Inf. Syst. Eval. 2011, 14, 46. [Google Scholar]
- Ferreras-Fernández, T.; Martín-Rodero, H.; García-Peñalvo, F.J.; Merlo-Vega, J.A. The systematic review of literature in LIS: An approach. In Proceedings of the Fourth International Conference on Technological Ecosystems for Enhancing Multiculturality, Salamanca, Spain, 2–4 November 2016; pp. 291–296. [Google Scholar]
- Rodero, H.M. La búSqueda Bibliográfica, Pilar Fundamental de la Medicina Basada en la Evidencia: Evaluación Multivariante en las Enfermedades Nutricionales y Metabólicas. Ph.D. Thesis, Universidad Miguel Hernández, Elche, Spain, 2014. [Google Scholar]
- Moher, D.; Altman, D.G.; Liberati, A.; Tetzlaff, J. PRISMA statement. Epidemiology 2011, 22, 128. [Google Scholar] [CrossRef]
- Moher, D.; Liberati, A.; Tetzlaff, J.; Altman, D.G.; Prisma Group. Preferred reporting items for systematic reviews and meta-analyses: The PRISMA statement. PLoS Med. 2009, 6, e1000097. [Google Scholar] [CrossRef] [PubMed]
- Pinciroli, C.; Trianni, V.; O’Grady, R.; Pini, G.; Brutschy, A.; Brambilla, M.; Mathews, N.; Ferrante, E.; Di Caro, G.; Ducatelle, F.; et al. ARGoS: A modular, multi-engine simulator for heterogeneous swarm robotics. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 5027–5034. [Google Scholar]
- Gonçalves, J.; Lima, J.; Costa, P.G. DC motors modeling resorting to a simple setup and estimation procedure. In CONTROLO’2014–Proceedings of the 11th Portuguese Conference on Automatic Control; Springer: Cham, Switzerland, 2015; pp. 441–447. [Google Scholar]
- Lima, J.L.; Goncalves, J.C.; Costa, P.G.; Moreira, A.P. Humanoid low-level controller development based on a realistic simulation. Int. J. Humanoid Robot. 2010, 7, 587–607. [Google Scholar] [CrossRef]
- Lima, J.; Gonçalves, J.; Costa, P.; Moreira, A. Humanoid realistic simulator: The servomotor joint modeling. In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics, Milan, Italy, 2–5 July 2009. [Google Scholar]
- Lima, J.; Gonçalves, J.; Costa, P.; Moreira, A. Humanoid robot simulator: A realistic dynamics approach. In CONTROLO 2008-The 8th Portuguese Conference on Automatic Control; Springer: Cham, Switzerland, 2008. [Google Scholar]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. ICRA Workshop Open Source Softw. 2009, 3, 5. [Google Scholar]
- Afanasyev, I.; Sagitov, A.; Magid, E. ROS-based SLAM for a Gazebo-simulated mobile robot in image-based 3D model of indoor environment. In Proceedings of the International Conference on Advanced Concepts for Intelligent Vision Systems, Catania, Italy, 26–29 October 2015; pp. 273–283. [Google Scholar]
- Martins, F.N.; Gomes, I.S.; Santos, C.R. RoSoS-A free and open-source robot soccer simulator for educational robotics. In Robotics; Springer: Cham, Switzerland, 2016; pp. 87–102. [Google Scholar]
- Paulo, C.; José, G.; José, L.; Paulo, M. Simtwo realistic simulator: A tool for the development and validation of robot software. Theory Appl. Math. Comput. Sci. 2011, 1, 17–33. [Google Scholar]
- Carpin, S.; Lewis, M.; Wang, J.; Balakirsky, S.; Scrapper, C. USARSim: A robot simulator for research and education. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 1400–1405. [Google Scholar]
- Klein, J.; Spector, L. 3d multi-agent simulations in the breve simulation environment. In Artificial Life Models in Software; Springer: London, UK, 2009; pp. 79–106. [Google Scholar]
- Eckert, L.; Piardi, L.; Lima, J.; Costa, P.; Valente, A.; Nakano, A. 3D Simulator Based on SimTwo to Evaluate Algorithms in Micromouse Competition. In World Conference on Information Systems and Technologies; Springer: Cham, Swizterland, 2019; pp. 896–903. [Google Scholar]
- Piardi, L.; Eckert, L.; Lima, J.; Costat, P.; Valente, A.; Nakano, A. 3D simulator with hardware-in-the-loop capability for the micromouse competition. In Proceedings of the 2019 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Porto, Portugal, 24–26 April 2019; pp. 1–6. [Google Scholar]
- Farias, G.; Fabregas, E.; Peralta, E.; Torres, E.; Dormido, S. A Khepera IV library for robotic control education using V-REP. IFAC-PapersOnLine 2017, 50, 9150–9155. [Google Scholar] [CrossRef]
- Cervera, E.; Casañ, G.; Tellez, R. Cloud Simulations for RoboCup. In Robot World Cup; Springer: Cham, Swizterland, 2017; pp. 180–189. [Google Scholar]
- Ferrein, A.; Maier, C.; Mühlbacher, C.; Niemueller, T.; Steinbauer, G.; Vassos, S. Controlling logistics robots with the action-based language YAGI. In Proceedings of the International Conference on Intelligent Robotics and Applications, Tokyo, Japan, 22–24 August 2016; pp. 525–537. [Google Scholar]
- Michel, O. Cyberbotics Ltd. Webots™: Professional mobile robot simulation. Int. J. Adv. Robot. Syst. 2004, 1, 5. [Google Scholar] [CrossRef]
- Koenig, N.; Howard, A. Design and use paradigms for gazebo, an open-source multi-robot simulator. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No. 04CH37566), Sendai, Japan, 28 September–2 October 2004; Volume 3, pp. 2149–2154. [Google Scholar]
- Denisov, A.; Budkov, V.; Mikhalchenko, D. Designing simulation model of humanoid robot to study servo control system. In Proceedings of the International Conference on Interactive Collaborative Robotics, ICR 2016, Budapest, Hungary, 24–26 August 2016; pp. 69–78. [Google Scholar]
- Peralta, E.; Fabregas, E.; Farias, G.; Vargas, H.; Dormido, S. Development of a Khepera IV Library for the V-REP Simulator. IFAC-PapersOnLine 2016, 49, 81–86. [Google Scholar] [CrossRef]
- Chebotareva, E.; Gavrilova, L. Educational Mobile Robotics Project “ROS-Controlled Balancing Robot” Based on Arduino and Raspberry Pi. In Proceedings of the 2019 12th International Conference on Developments in eSystems Engineering (DeSE), Kazan, Russia, 7–10 October 2019; pp. 209–214. [Google Scholar]
- Gonçalves, J.; Lima, J.; Malheiros, P.; Costa, P. Fostering advances in mechatronics and robotics resorting to simulation. IFAC Proc. Vol. 2010, 43, 326–331. [Google Scholar] [CrossRef]
- Pinho, T.; Moreira, A.P.; Boaventura-Cunha, J. Framework using ROS and SimTwo simulator for realistic test of mobile robot controllers. In CONTROLO’2014–Proceedings of the 11th Portuguese Conference on Automatic Control; Springer: Cham, Swizterland, 2015; pp. 751–759. [Google Scholar]
- Shimchik, I.; Sagitov, A.; Afanasyev, I.; Matsuno, F.; Magid, E. Golf cart prototype development and navigation simulation using ROS and Gazebo. In MATEC Web of Conferences; EDP Sciences: Les Ulis, France, 2016; Volume 75, p. 09005. [Google Scholar]
- Lima, J.; Costa, P.; Brito, T.; Piardi, L. Hardware-in-the-loop simulation approach for the Robot at Factory Lite competition proposal. In Proceedings of the 2019 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Porto, Portugal, 24–26 April 2019; pp. 1–6. [Google Scholar]
- Lima, J.; Gonçalves, J.; Costa, P.; Moreira, A. Humanoid robot gait planning resorting to an adaptive simulated annealing algorithm. In Proceedings of the 10th Conference on Autonomous Robot Systems and Competitions, Leiria, Portugal, 24 March 2010. [Google Scholar]
- Lima, J.L.; Gonçalves, J.C.; Costa, P.G.; Moreira, A.P. Humanoid robot simulation with a joint trajectory optimized controller. In Proceedings of the 2008 IEEE International Conference on Emerging Technologies and Factory Automation, Hamburg, Germany, 15–18 September 2008; pp. 986–993. [Google Scholar]
- Ferreira, N.F.; Araujo, A.; Couceiro, M.S.; Portugal, D. Intensive summer course in robotics–Robotcraft. Appl. Comput. Inform. 2020. [Google Scholar] [CrossRef]
- Haber, A.; McGill, M.; Sammut, C. Jmesim: An open source, multi platform robotics simulator. In Proceedings of the Australasian Conference on Robotics and Automation, Wellington, New Zealand, 3–5 December 2012. [Google Scholar]
- Costa, P.J.; Moreira, N.; Campos, D.; Gonçalves, J.; Lima, J.; Costa, P.L. Localization and navigation of an omnidirectional mobile robot: the robot@ factory case study. IEEE Rev. Iberoam. Tecnol. Del Aprendiz. 2016, 11, 1–9. [Google Scholar] [CrossRef]
- Vaughan, R. Massively multi-robot simulation in stage. Swarm Intell. 2008, 2, 189–208. [Google Scholar] [CrossRef]
- Das, M.T.; Dülger, L.C. Mathematical modelling, simulation and experimental verification of a scara robot. Simul. Model. Pract. Theory 2005, 13, 257–271. [Google Scholar] [CrossRef]
- Campos, D.; Santos, J.; Gonçalves, J.; Costa, P. Modeling and simulation of a hacked neato xv-11 laser scanner. In Robot 2015: Second Iberian Robotics Conference; Springer: Cham, Swizterland, 2016; pp. 425–436. [Google Scholar]
- Lima, J.; Gonçalves, J.; Costa, P.J.; Moreira, A.P. Modeling and simulation of a laser scanner sensor: An industrial application case study. In Advances in Sustainable and Competitive Manufacturing Systems; Springer: Berlin/Heidelberg, Germany, 2013; pp. 245–258. [Google Scholar]
- Gonçalves, J.; Lima, J.; Costa, P.J.; Moreira, A.P. Modeling and simulation of the emg30 geared motor with encoder resorting to simtwo: The official robot@ factory simulator. In Advances in Sustainable and Competitive Manufacturing Systems; Springer: Berlin/Heidelberg, Germany, 2013; pp. 307–314. [Google Scholar]
- Lima, J.; Gonçalves, J.; Costa, P.J. Modeling of a low cost laser scanner sensor. In CONTROLO’2014–Proceedings of the 11th Portuguese Conference on Automatic Control; Springer: Berlin/Heidelberg, Germany, 2015; pp. 697–705. [Google Scholar]
- Vega, J.; Cañas, J.M. PiBot: An open low-cost robotic platform with camera for STEM education. Electronics 2018, 7, 430. [Google Scholar] [CrossRef]
- Gonçalves, J.; Silva, M.; Costa, P.; Sousa, A. Proposal of a low cost educational mobile robot experiment: An approach based on hardware and simulation. In Proceedings of the 6th Internation Conference on Robotics on Education, Yverdon-les-Bains, Switzerland, 21 May 2015. [Google Scholar]
- Lima, J.; Gonçalves, J.; Costa, P.; Moreira, A. Realistic behaviour simulation of a humanoid robot. In Proceedings of the 8th Conference on Autonomous Robot Systems and Competitions, Aveiro, Portugal, 2–6 April 2008. [Google Scholar]
- Gonçalves, J.; Lima, J.; Malheiros, P.; Costa, P. Realistic simulation of a lego mindstorms nxt based robot. In Proceedings of the 2009 IEEE Control Applications, (CCA) & Intelligent Control, St. Petersburg, Russia, 8–10 July 2009; pp. 1242–1247. [Google Scholar]
- Verner, I.; Cuperman, D.; Fang, A.; Reitman, M.; Romm, T.; Balikin, G. Robot online learning through digital twin experiments: A weightlifting project. In Online Engineering & Internet of Things; Springer: Berlin/Heidelberg, Germany, 2018; pp. 307–314. [Google Scholar]
- Braun, J.; Fernes, L.A.; Moya, T.; Oliveira, V.; Brito, T.; Lima, J.; Costa, P. Robot@ factory lite: An educational approach for the competition with simulated and real environment. In Proceedings of the Iberian Robotics Conference, Porto, Portugal, 20–22 November 2019; pp. 478–489. [Google Scholar]
- Gonçalves, J.; Lima, J.; Oliveira, H.; Costa, P. Sensor and actuator modeling of a realistic wheeled mobile robot simulator. In Proceedings of the 2008 IEEE International Conference on Emerging Technologies and Factory Automation, Hamburg, Germany, 15–18 September 2008; pp. 980–985. [Google Scholar]
- Gonçalves, J.; Lima, J.; Malheiros, P.; Costa, P. Sensor and actuator stochastic modeling of the Lego Mindstorms NXT educational Kit. In Proceedings of the 10th Conference on Mobile Robots and Competitions, Leiria, Portugal, 24 March 2010; pp. 11–16. [Google Scholar]
- Zwilling, F.; Niemueller, T.; Lakemeyer, G. Simulation for the RoboCup logistics league with real-world environment agency and multi-level abstraction. In Robot Soccer World Cup; Springer: Cham, Switzerland, 2014; pp. 220–232. [Google Scholar]
- Cervera, E.; Martinet, P.; Marin, R.; Moughlbay, A.A.; Del Pobil, A.P.; Alemany, J.; Esteller, R.; Casañ, G. The robot programming network. J. Intell. Robot. Syst. 2016, 81, 77–95. [Google Scholar] [CrossRef]
- Browning, B.; Tryzelaar, E. Übersim: a multi-robot simulator for robot soccer. In Proceedings of the Second International Joint Conference on Autonomous Agents and Multiagent Systems, Melbourne Australia, 14–18 July 2003; pp. 948–949. [Google Scholar]
- Rohmer, E.; Singh, S.P.; Freese, M. V-REP: A versatile and scalable robot simulation framework. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1321–1326. [Google Scholar]
- Gawryszewski, M.; Kmiecik, P.; Granosik, G. V-REP and LabVIEW in the Service of Education. In Robotics in Education; Springer: Berlin/Heidelberg, Germany, 2017; pp. 15–27. [Google Scholar]
- Petry, M.; Moreira, A.P.; Reis, L.P.; Rossetti, R. Intelligent wheelchair simulation: Requirements and architectural issues. In Proceedings of the 11th International Conference on Mobile Robotics and Competitions, Lisbon, Portugal, 6 April 2011; pp. 102–107. [Google Scholar]
- Boedecker, J.; Asada, M. Simspark–concepts and application in the robocup 3d soccer simulation league. Auton. Robot. 2008, 174, 181. [Google Scholar]
- Xu, Y.; Vatankhah, H. Simspark: An open source robot simulator developed by the robocup community. In Robot Soccer World Cup; Springer: Berlin/Heidelberg, Germany, 2013; pp. 632–639. [Google Scholar]
- Michel, O. Webots: Symbiosis between virtual and real mobile robots. In International Conference on Virtual Worlds; Springer: Berlin/Heidelberg, Germany, 1998; pp. 254–263. [Google Scholar]
- Pinciroli, C.; Trianni, V.; O’Grady, R.; Pini, G.; Brutschy, A.; Brambilla, M.; Mathews, N.; Ferrante, E.; Di Caro, G.; Ducatelle, F. ARGoS: A modular, parallel, multi-engine simulator for multi-robot systems. Swarm Intell. 2012, 6, 271–295. [Google Scholar] [CrossRef]
- Gerkey, B.; Vaughan, R.T.; Howard, A. The player/stage project: Tools for multi-robot and distributed sensor systems. In Proceedings of the 11th International Conference on Advanced Robotics, Coimbra, Portugal, 30 June–3 July 2003; Volume 1, pp. 317–323. [Google Scholar]
- Lemaignan, S.; Echeverria, G.; Karg, M.; Mainprice, J.; Kirsch, A.; Alami, R. Human-robot interaction in the MORSE simulator. In Proceedings of the Seventh Annual ACM/IEEE International Conference on Human-Robot Interaction, Boston, MA, USA, 5–8 March 2012; pp. 181–182. [Google Scholar]
- Echeverria, G.; Lassabe, N.; Degroote, A.; Lemaignan, S. Modular open robots simulation engine: Morse. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 46–51. [Google Scholar]
- Noori, F.M.; Portugal, D.; Rocha, R.P.; Couceiro, M.S. On 3D simulators for multi-robot systems in ROS: MORSE or Gazebo? In Proceedings of the 2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Shanghai, China, 11–13 October 2017; pp. 19–24. [Google Scholar]
- Freese, M.; Singh, S.; Ozaki, F.; Matsuhira, N. Virtual robot experimentation platform v-rep: A versatile 3d robot simulator. In Proceedings of the International Conference on Simulation, Modeling, and Programming for Autonomous Robots, Darmstadt, Germany, 15–18 November 2010; pp. 51–62. [Google Scholar]
- Friedmann, M. Simulation of Autonomous Robot Teams with Adaptable Levels of Abstraction. Ph.D. Thesis, Technische Universität, Berlin, Germany, 2010. [Google Scholar]
- Jackson, J. Microsoft robotics studio: A technical introduction. IEEE Robot. Autom. Mag. 2007, 14, 82–87. [Google Scholar] [CrossRef]
- Cepeda, J.S.; Chaimowicz, L.; Soto, R. Exploring Microsoft Robotics Studio as a mechanism for service-oriented robotics. In Proceedings of the 2010 Latin American Robotics Symposium and Intelligent Robotics Meeting, Montreal, QC, Canada, 3–5 October 2010; pp. 7–12. [Google Scholar]
- Workman, K.; Elzer, S. Utilizing Microsoft robotics studio in undergraduate robotics. J. Comput. Sci. Coll. 2009, 24, 65–71. [Google Scholar]
- Kanehiro, F.; Hirukawa, H.; Kajita, S. Openhrp: Open architecture humanoid robotics platform. Int. J. Robot. Res. 2004, 23, 155–165. [Google Scholar] [CrossRef]
- Cisneros, R.; Yoshida, E.; Yokoi, K. Ball dynamics simulation on openhrp3. In Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guangzhou, China, 11–14 December 2012; pp. 871–877. [Google Scholar]
- Michel, O. Khepera Simulator Version 2.0, User Manual. Université de Nice–Sophia Antipolis; Laboratoire I3S-CNRS, France/EPFL–Lausanne, Swiss: Valbonne, France, 1996. [Google Scholar]
- McDowell, P.; Darken, R.; Sullivan, J.; Johnson, E. Delta3D: A complete open source game and simulation engine for building military training systems. J. Def. Model. Simul. 2006, 3, 143–154. [Google Scholar] [CrossRef]
- Darken, R.; McDowell, P.; Johnson, E. Projects in VR: The Delta3D open source game engine. IEEE Comput. Graph. Appl. 2005, 25, 10–12. [Google Scholar] [CrossRef]
- Corke, P.I. A robotics toolbox for MATLAB. IEEE Robot. Autom. Mag. 1996, 3, 24–32. [Google Scholar] [CrossRef]
- Corke, P.I. A computer tool for simulation and analysis: The Robotics Toolbox for MATLAB. In Proceedings of the Australian Conference on Robotics Association, Brisbane, Australia, 5–7 July 1995; pp. 319–330. [Google Scholar]
- Toz, M.; Kucuk, S. Dynamics simulation toolbox for industrial robot manipulators. Comput. Appl. Eng. Educ. 2010, 18, 319–330. [Google Scholar] [CrossRef]
- Karakaya, S.; Kucukyildiz, G.; Ocak, H. A new mobile robot toolbox for MATLAB. J. Intell. Robot. Syst. 2017, 87, 125–140. [Google Scholar] [CrossRef]
- Mondada, F.; Pettinaro, G.C.; Guignard, A.; Kwee, I.W.; Floreano, D.; Deneubourg, J.L.; Nolfi, S.; Gambardella, L.M.; Dorigo, M. SWARM-BOT: A new distributed robotic concept. Auton. Robot. 2004, 17, 193–221. [Google Scholar] [CrossRef]
- Pettinaro, G.C.; Kwee, I.W.; Gambardella, L.M. Definition, Implementation, and Calibration of the Swarmbot3d Simulator; Technical Report No. IDSIA-21-03; IDSIA: Manno, Switzerland, 2003. [Google Scholar]
- Pettinaro, G.C.; Kwee, I.W.; Gambardella, L.M. Swarmbot3D User Manual. 2003. Available online: https://repository.supsi.ch/5558/1/IDSIA-22-03.pdf (accessed on 11 June 2021).
- Dąbek, P.; Trojnacki, M.; Jaroszek, P.; Zawieska, K. Concept, Physical Design and Simulator of IRYS Social Robot Head. In Proceedings of the International Conference Mechatronics, Brno, Czech Republic, 6–8 September 2017; pp. 91–100. [Google Scholar]
- Costa, H.; Tavares, P.; Santos, J.; Rio, V.; Sousa, A. Simulation of a System Architecture for Cooperative Robotic Cleaning. In Proceedings of the Robot 2015: Second Iberian Robotics Conference, Lisbon, Portugal, 19–21 November 2015; pp. 717–728. [Google Scholar]
- Couceiro, M.S.; Araújo, A.G.; Tatarian, K.; Ferreira, N.M. RobotCraft: The first international collective internship for advanced robotics training. In International Conference on Robotics and Education RiE 2017; Springer: Cham, Switzerland, 2018; pp. 31–43. [Google Scholar]
- Conte, G.; Scaradozzi, D.; Mannocchi, D.; Raspa, P.; Panebianco, L.; Screpanti, L. Development and experimental tests of a ROS multi-agent structure for autonomous surface vehicles. J. Intell. Robot. Syst. 2018, 92, 705–718. [Google Scholar] [CrossRef]
- Araújo, A.; Portugal, D.; Couceiro, M.S.; Rocha, R.P. Integrating Arduino-based educational mobile robots in ROS. J. Intell. Robot. Syst. 2015, 77, 281–298. [Google Scholar] [CrossRef]
- Tatarian, K.; Pereira, S.; Couceiro, M.S.; Portugal, D. Tailoring a ROS educational programming language architecture. In International Conference on Robotics and Education RiE; Springer: Cham, Switzerland, 2018; pp. 217–229. [Google Scholar]
- Koubâa, A. (Ed.) Robot Operating System (ROS); Springer: Berlin/Heidelberg, Germany, 2017; Volume 1, pp. 112–156. [Google Scholar]
- Quigley, M.; Gerkey, B.; Smart, W.D. Programming Robots with ROS: A Practical Introduction to the Robot Operating System; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2015. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Quality Questions | Questions |
|---|---|
| QQ1 | Is the paper based on research or is it a report based on expert opinion? |
| QQ2 | Is there a description of the context in which the research was carried out? |
| QQ3 | Is there a clear statement of the aims of the research? |
| QQ4 | Was the research conducted to address the aims of the research? |
| QQ5 | Were the simulations made during the study applied in an educational context? |
| QQ6 | Could the simulator used in the study be applied in an educational context? |
| QQ7 | Is the simulator used in the research able to make realistic simulations? |
| QQ8 | Was the method used during the study described? |
| QQ9 | Was the data analysis sufficiently rigorous? |
| QQ10 | Is the study of value for the research field? |
| QQ11 | Is there a clear statement of findings? |
| Data Questions | Questions |
|---|---|
| DQ1 | Is the simulator able to simulate robotics? |
| DQ2 | Is the simulator able to simulate sensors? |
| DQ3 | Is the simulator able to simulate actuators? |
| DQ4 | What method is used for the simulator? |
| DQ5 | Is the realistic simulation made under a mathematical–physical model? |
| DQ6 | What is the simulator used? |
| DQ7 | Is the simulator free to use? |
| DQ8 | Is the simulator open-source or not? |
| Reference a | DQ6 b | Score c | DQ1 d | DQ2 e | DQ3 f |
|---|---|---|---|---|---|
| [30] | ARGoS | 40 | True | True | True |
| [31] | Sim-Two | 36 | True | True | True |
| [32] | Sim-Two | 40 | True | True | True |
| [33] | Sim-Two | 40 | True | True | True |
| [34] | Sim-Two | 38 | True | True | True |
| [35] | ROS | 34 | False | False | False |
| [36] | Gazebo | 40 | True | True | True |
| [37] | RoSoS | 44 | True | False | False |
| [38] | Sim-Two | 44 | True | True | True |
| [39] | USARSim | 38 | True | True | True |
| [40] | Breve | 34 | True | False | False |
| [41] | Sim-Two | 40 | True | True | True |
| [42] | Sim-Two | 40 | True | True | True |
| [43] | V-REP | 44 | True | True | True |
| [44] | ROS Development Studio | 36 | True | True | True |
| [45] | Gazebo | 40 | True | True | True |
| [46] | Webots | 32 | True | True | True |
| [47] | Gazebo | 36 | True | True | True |
| [48] | Simulink | 34 | False | True | True |
| [49] | V-REP | 44 | True | True | True |
| [50] | Gazebo | 42 | True | True | True |
| [51] | Sim-Two | 40 | True | True | True |
| [52] | Sim-Two | 38 | True | True | True |
| [53] | Gazebo | 36 | True | True | True |
| [54] | Sim-Two | 40 | True | True | True |
| [55] | Sim-Two | 40 | True | True | True |
| [56] | Sim-Two | 40 | True | True | True |
| [57] | Player/Stage | 42 | True | True | True |
| [58] | jmeSim | 32 | True | True | True |
| [59] | Sim-Two | 44 | True | True | True |
| [60] | Stage | 40 | True | True | True |
| [61] | Exception 1 | 34 | True | True | True |
| [62] | Sim-Two | 44 | True | True | True |
| [63] | Sim-Two | 40 | True | True | True |
| [64] | Sim-Two | 40 | True | True | True |
| [65] | Sim-Two | 32 | True | True | True |
| [66] | Gazebo | 42 | True | True | True |
| [67] | Sim-Two | 44 | True | True | True |
| [68] | UberSim | 38 | True | True | True |
| [69] | Sim-Two | 44 | True | True | True |
| [70] | Creo | 32 | True | True | True |
| [71] | Sim-Two | 42 | True | True | True |
| [72] | Sim-Two | 38 | True | True | True |
| [73] | Sim-Two | 40 | True | True | True |
| [74] | Gazebo | 42 | True | True | True |
| [1] | MATLAB/Simulink | 42 | True | True | True |
| [75] | Exception 2 | 42 | True | True | True |
| [76] | UberSim | 40 | True | True | True |
| [77] | V-REP | 34 | True | True | True |
| [78] | V-REP | 44 | True | True | True |
| Simulators | Found in |
|---|---|
| USARSim | [30,36,39,60,75] |
| SimSpark | [32,33,34] |
| ROS Development Studio | [44] |
| Gazebo | [30,36,38,39,43,44,45,47,49,50,53,57,60,66,74,75,77] |
| Webots | [30,32,33,34,36,39,43,44,46,49,57,60,75,77] |
| Sim-Two | [31,32,33,38,41,42,51,52,54,55,56,59,62,64,65,67,69,72,73] |
| ARGoS | [30,49,60] |
| Stage/Player | [38,39,57,60] |
| MORSE | [57] |
| STDR | [57] |
| V-REP | [36,43,49,57,77,78] |
| RoSoS | [37] |
| UberSim | [32,33,34,67,76] |
| Breve | [40] |
| Teambots | [60] |
| MuRoSimF | [30,32,33,34] |
| Microsoft Robotics Studio | [32,33,36,60] |
| OpenHRP3 | [33,77] |
| jmeSim | [36,58] |
| BOB | [38] |
| Khepera | [38] |
| Delta3D | [38] |
| MATLAB/Simulink | [1,48] |
| Swarmbot3d | [60] |
| Creo | [70] |
| Simulators | |||
|---|---|---|---|
| USARSim | Description | Unified System for Automation and Robot Simulator, forming the acronym USARSim, is a high-fidelity simulation of robots and environments based on the Unreal Tournament game engine. It was built upon Unreal Engine 2.0, a game engine commercially available produced by Epic Games. It has a uniform applications programmer interface, validated models, and physics-based simulation. USARSim is composed of a set of models and classes that define the simulation of robots, sensors and actuators. It has the ability to simulate several types of robots as wheeled robots, underwater vehicles, legged platforms and humanoids [39,79]. | |
| Features | Robot Types | Wheeled; Underwater; Legged Humanoids; | |
| Sensors and Actuators | Odometry; INU; Encoder; Touch; Range(Sonar, IR, Scanner); RFID Robot Camera Sound HumanMotion | ||
| Compatibility | Player MOAST | ||
| Engines | Unreal Engine | ||
| Programming Languages | UnrealScript | ||
| Other Features | Users can add new robots models, sensors and actuators; 3D Visualization; Open-Source; Free to Use; | ||
| SimSpark | Description | The SimSpark is a multi-robot simulator based on the generic components of the Spark physical multi-agent simulation system and its main application is in the Soccer Competitions. This simulator is implemented through the Open Dynamics Engine (ODE) for physically realistic dynamics simulation, allowing fast rigid body simulations, collision detection and the use of articulated body structures. It also includes a 3D visualization based on OpenGL, enabling the possibility to create scenes. The creation of new robot models it is possible using the Ruby interface in which is an interpreted language [32,33,34,80,81]. | |
| Features | Robot Types | Wheeled; Legged; Humanoids; | |
| Sensors and Actuators | Gyroscope; Motors; | ||
| Compatibility | TCP Protocol; UDP Protocol; | ||
| Engines | ODE OpenGL | ||
| Programming Languages | C++ Ruby | ||
| Other Features | Users can add new robots models, sensors and actuators; 3D Visualization; Open-Source; Free to Use; | ||
| ROS Development Studio | Description | ROS Development Studio is a web application for the simulation of robots in the cloud. This platform consists of virtual machines running in the could infrastructure provided by Amazon Web Services. The cloud platform supports two simulators, which are Gazebo and Webots [44]. | |
| Features | Robot Types | Not Applicable | |
| Sensors and Actuators | Not Applicable | ||
| Compatibility | Not Applicable | ||
| Engines | Not Applicable | ||
| Programming Languages | Not Applicable | ||
| Other Features | Not Applicable | ||
| Gazebo | Description | Gazebo simulator came up as an improvement of the Player and Stage project, and was designed to accurately reproduce the dynamic environments that a robot may encounter. It is completely open source and freely available. Its structure enables the support to simulate multi robot systems, and its major feature is the ability to easily create new robots, actuators, sensors and arbitrary objects. It was built based on the Open Dynamics Engine, and currently supports Bullet, Simbody and DART physics engines. The visualisation of Gazebo’s robots and scenes are in 3D and it was held by OpenGL and GLUT (OpenGL Utility Toolkit); at the moment it is supported by OGRE [36,47,53]. | |
| Features | Robot Types | Wheeled; Legged; Humanoids; Arms; Drones; Others; | |
| Sensors and Actuators | Several Sensors; Several Motors; | ||
| Compatibility | Player; TCP/IP; ROS; Others; | ||
| Engines | ODE; Bullet; Simbody; DART; OpenGL; GLUT; OGRE; | ||
| Programming Languages | XML; C++; | ||
| Other Features | Users can add new robots models, sensors and actuators; 3D Visualization; Open-Source; Sensors and Noise; Plugins; Robot Models; Cloud Simulation; Command Line Tools; Free to Use; | ||
| Webots | Description | Webots simulator is an open source and multi-platform desktop application applied to simulate robots. It provides a complete development environment to model, program and simulate robots. It has been designed for a professional use, and it is widely used in industry, education and research. It was developed by Cyberbotics Ltd. in 1998 and currently it is free to use. The main features about Webots is the combination of a modern graphical user interface (Qt), the ODE fork physics engine and the OpenGL rendering engine. The robot’s programming may be in C, C++, Python, Java, MATLAB and ROS. It can simulate a wide variety of robots as wheeled, industrial arms, bipeds, multi-legs, modular, automobiles, flying drones, autonomous underwater, tracked and aerospace [46,82]. | |
| Features | Robot Types | Two-Wheeled; Arms; Bipeds; Multi-legs; Modular; Automobiles; Drones; Autonomous Underwater; Tracked; Aerospace | |
| Sensors and Actuators | Several Sensors; Several Motors; | ||
| Compatibility | ROS; TCP/IP; MATLAB; Others; | ||
| Engines | Qt; ODE; OpenGL | ||
| Programming Languages | C/C++; Python; Java; MATLAB; ROS; | ||
| Other Features | Users can add new robot models, sensors and actuators; 3D Visualization; Open-Source; Asset Library of Robots, Sensors and Actuators, Objects and Materials; Free and Paid Versions; | ||
| SimTwo | Description | The SimTwo is a versatile robot simulation environment that allows the rapid test and design of differential, omnidirectional, industrial, humanoid robot and other types. It also has a set of predefined components, such as sensors and motors, where specified models are inputted. Realistic rigid body dynamics is possible thanks to the Open Dynamics Engine, and issues about the robots’ look and behaviors are written in XML format files. The visualization is in 3D, and that is provided through GLScene. SimTwo is a free software that is currently open source [38,41,48]. | |
| Features | Robot Types | Wheeled; Omnidirectional; Industrial; Humanoids; Others; | |
| Sensors and Actuators | Several Sensors; Several Motors; | ||
| Compatibility | ROS; MATLAB; LabView; UDP Protocol; Others; | ||
| Engines | ODE; Physics Abstraction Layer; GLScene; OpenGL; | ||
| Programming Languages | XML; C/C++; MATLAB; Labview; | ||
| Other Features | Asset Library of Robots, Sensors and Actuators, Objects and Materials; 3D Visualization; Free to Use; | ||
| ARGoS | Description | Autonomous Robots Go Swarming is an open source multi-robot simulator that was designed to study tools and control strategies for heterogeneous swarms of robots. It initially was released for Linux and Mac OS X, and in 2016 was updated to Windows systems. The core of its architecture is the simulated 3D space. Sensors and actuators can be implemented in a generic and efficient way, taking into account specific components instead of the complete robot. New robots can be inserted, reusing the already existing components and all the sensors/actuators, depending on those components working without modification. ARGoS supports multiple engines of different types and can run in parallel during an experiment. The 3D dynamics engine is based on the Open Dynamics Engine, and the 2D dynamics engine depends on the open-source physics engine library Chipmunk. It has either a 3D or 2D custom engine. The 3D visualization has a graphical user interface based on Qt4 and OpenGL. ARGoS and the control interface are written in C++ [30,83]. | |
| Features | Robot Types | Swarm Robotics | |
| Sensors and Actuators | Custom Sensors; Custom Motors; | ||
| Compatibility | Not Applicable | ||
| Engines | ODE; Chipmunk; Custom 2D and 3D Engine; Qt: OpenGL; | ||
| Programming Languages | C++ | ||
| Other Features | Users can add new robot models, sensors and actuators; 3D Visualization; Open-Source; Free to Use; | ||
| Stage/Player | Description | Stage is a robot simulator that provides a virtual world populated by mobile robots and sensors in a two-dimensional bitmapped environment, along with various objects for the robots to sense and manipulate. It provides several sensor and actuator models, including sonar or infrared sensors, scanning laser rangefinder, color-blob tracking, fiducial tracking, bumpers, grippers and mobile robot bases with odometric or global localization. The main usage for Stage for massively multi-robot experiments, suitable for swarm robotics and other research where the behavior of large robot populations is of interest. Player is a network server for robot control. By running on the robot, it can provide a simple and clear interface for the robot’s sensors and actuators over the IP network [38,39,57,60,84]. | |
| Features | Robot Types | Swarm Robotics; Several Robot Models; | |
| Sensors and Actuators | Several Sensors Models; Several Motors; | ||
| Compatibility | Player; | ||
| Engines | Custom Engine | ||
| Programming Languages | C++; TCL; Java; Python; | ||
| Other Features | Users can add new robot models, sensors and actuators; 2D Visualization; Open-Source; Free to Use; | ||
| MORSE | Description | MORSE is a generic simulator for academic robotics. It focuses on realistic 3D simulation from small to large environments, indoor or outdoor, from one to tenths of autonomous robots and can be entirely controlled from the command-line. Simulation scenes are generated from simple Python scripts. MORSE comes with a set of standard sensors and actuators such as cameras, laser scanners, GPS, speed controllers, high-level waypoints controllers, generic joint controllers, and so forth. It also has robotic bases as quadrotors, generic four wheel vehicles, and new ones can easily be added. This simulator is based on the Blender Game Engine for rendering and the Bullet engine for physics simulation [57,85,86,87]. | |
| Features | Robot Types | Wheeled; Quadrotors; Others; | |
| Sensors and Actuators | Cameras; Laser Scanner; GPS; Speed Controllers; | ||
| Compatibility | ROS; YARP; Pocolibs; MOOS; HLA; Mavlink; | ||
| Engines | Blender Game Engine; Bullet | ||
| Programming Languages | Python | ||
| Other Features | Users can add new robot models, sensors and actuators; 3D Visualization; Open-Source; Free to Use; Asset Library of Robots, Sensors and Actuators, Objects and Materials; | ||
| STDR | Description | Simple Two Dimensional Robot Simulator as the title, the STDR simulator’s goal is to make a single robot’s or swarm’s simulation as simple as possible; as a consequence, it is not meant to be the most realistic simulator, by minimizing the needed actions to perform a experiment. STDR can function with or without a graphical environment, which allows for experiments to take place even using ssh connections [57]. | |
| Features | Robot Types | Not Applicable | |
| Sensors and Actuators | Not Applicable | ||
| Compatibility | Not Applicable | ||
| Engines | Not Applicable | ||
| Programming Languages | Not Applicable | ||
| Other Features | Not Applicable | ||
| V-REP (CoppeliaSim) | Description | The Virtual Robot Experimentation Platform or V-REP is the result of turning all requirements into a versatile and scalable simulation framework. According to its website https://www.coppeliarobotics.com/, accessed on 8 June 2021, V-REP was discontinued in November 26 2019, becoming CoppeliaSim Robot Simulator and owning an integrated development environment based on a distributed control architecture, which means that each object/model can be individually controlled via an embedded script such as ROS, BlueZero node, a remote API client or a custom solution. CoppeliaSim is very versatile and ideal for multi-robot applications. Controllers can be written in C/C++, Python, Java, Lua, Matlab or Octave. It can be applied for fast algorithm development, factory automation simulations, fast prototyping and verification, robotics related education, remote monitoring, safety double-checking, as a digital twin, and much more [43,49,77,78,88]. | |
| Features | Robot Types | multi-robots | |
| Sensors and Actuators | multi-sensors | ||
| Compatibility | ROS; BlueZero; LabView; TCP/IP; | ||
| Engines | Bullet; ODE; Vortex; Newton; | ||
| Programming Languages | C/C++; Lua; Java; Python; LabView; MATLAB; Octave; | ||
| Other Features | Asset Library of Robots, Sensors and Actuators, Objects and Materials; 3D Visualization; Free and Paid Versions; | ||
| RoSoS | Description | Robot Soccer Simulator is a simulator platform that was built and programmed using Processing language, and considers two guidelines: 1. the program for a virtual robot should be similar to the program of a real robot; and 2. users should have the possibility to change the simulator operation, such as physics and game rules, and also to personalize their robots. It is free, open-source and runs on Windows, Mac OS and Linux [37]. | |
| Features | Robot Types | Soccer Robots | |
| Sensors and Actuators | Ball Sensor; Compass Sensor; Ultrassonic Sensor; | ||
| Compatibility | Not Applicable | ||
| Engines | Custom Engine | ||
| Programming Languages | C++; Java; | ||
| Other Features | Noise and Imprecisions; 2D Visualization; Open-Source; Free to Use; | ||
| UberSim | Description | A Multi-Robot Simulator for Robot Soccer was created as a free and open-source simulator project, with the objective of being a robot soccer simulation engine with high-fidelity dynamics and collision models and extensible robot classes, built based on the Open Dynamics Engine [76]. A search was made in order to obtain more information about the ÜberSim simulator but no further information was found, even its website was off-line. Thus, it was considered discontinued. | |
| Features | Robot Types | Multi-Agent Systems; Artifial Life; | |
| Sensors and Actuators | Not Applicable | ||
| Compatibility | Not Applicable | ||
| Engines | OpenGL; | ||
| Programming Languages | Python; Steve; | ||
| Other Features | 3D Visualization; Free to Use; Open-Source; | ||
| Breve | Description | Breve is a free, open-source software package that makes it easy to build 3D simulations of multi-agent systems and artificial life. Using Python, or using a simple scripting language called steve, you can define the behaviors of agents in a 3D world and observe how they interact. Breve includes physical simulation and collision detection; it is possible to simulate realistic creatures and to use an OpenGL display engine to visualize simulated worlds. However, according to its website http://www.spiderland.org/s/, accessed on 8 June 2021, the project has not been maintained since 2009, but it is still available for download for Windows, Linux and Mac OS [40]. | |
| Features | Robot Types | Wheeled; Legged; Humanoids; Arms; Drones; Others; | |
| Sensors and Actuators | Several Sensors; Several Motors; | ||
| Compatibility | Player; TCP/IP; ROS; Others; | ||
| Engines | ODE; Bullet; Simbody; DART; OpenGL; GLUT; OGRE; | ||
| Programming Languages | XML; C++; | ||
| Other Features | Users can add new robots models, sensors and actuators; 3D Visualization; Open-Source; Sensors and Noise; Plugins; Robot Models; Cloud Simulation; Command Line Tools; Free to Use; | ||
| TeamBots | Description | TeamBots is a 2D Java-based simulator for multi-agent mobile robotics research. The simulation environment and the robots are written mostly in Java. It supports multiple heterogeneous robot hardware running heterogeneous control systems. Complex (or simple) experimental environments can be designed with walls, roads, opponent robots and circular obstacles. All of these objects may be included in a simulation by editing an easily understandable human-readable description file. TeamBots runs under Windows, Linux and MacOS. The search for information about this simulator was not an easy task and since the latest version of this platform was updated in April 2000, it can be considered discontinued [60]. | |
| Features | Robot Types | Nomad 150; Cye Robot; | |
| Sensors and Actuators | Not Applicable | ||
| Compatibility | Not Applicable | ||
| Engines | Not Applicable | ||
| Programming Languages | Java | ||
| Other Features | 2D Visualization; Free to Use; Open-Source; | ||
| MuRoSimF | Description | The Multi-Robot-Simulation-Framework (MuRoSimF) provides an easy way to generate interactive simulations for the motion and sensing capabilities of wheeled, biped and multi-legged robots. Unlike most existing robot simulation packages, MuRoSimF is not limited to predefined simulation algorithms (e.g., for dynamics or sensor simulation). Instead of this, it provides a flexible and modular way to combine simulation models of the robots and algorithms. By this, it is possible to generate simulations, which are scalable in their level of physical accuracy, level of detail and computational complexity, thus enabling the user to create simulations that are adequate to a given task. Using MuRoSimF, several simulations for mobile robots including wheeled, biped and four-legged devices have been created. MuRoSimF provides a range of exchangeable algorithms for motion simulation (kinematic, simplified dynamics, full multi-body-system dynamics), collision detection and sensor simulation (including cameras, laser range finders and inertial sensors). More modules, for example, for detailed simulation of servo motors can be added to the framework easily [89]. | |
| Features | Robot Types | Wheeled; Bipeds; Multi-Legged | |
| Sensors and Actuators | Cameras; Laser Range Finders; Inertial Sensors; | ||
| Compatibility | Not Applicable | ||
| Engines | OpenGL; Custom Dynamics Engine; | ||
| Programming Languages | C++ | ||
| Other Features | 2D Visualization; 3D Visualization; Free to Use; Open-Source; | ||
| Microsoft Robotics Studio | Description | Microsoft Robotics Studio is an environment for robot control and simulation. It was designed for academic, hobbyist and commercial developers, and it also contains a wide variety of robot hardware. A point to note about this simulator is that it is only available on the Windows operational system. The main features include the Microsoft Visual Programming Language for creating and debugging robot applications and 3D simulation with access to the robot’s sensors and actuators. Unfortunately, this simulator was discontinued in 2012 [90,91,92]. | |
| Features | Robot Types | multi-robots | |
| Sensors and Actuators | Several Sensors; Several Motors; | ||
| Compatibility | OpenCV; CodePlex; | ||
| Engines | NVIDIA PhysX | ||
| Programming Languages | C#; Microsoft Visual Programming Language; | ||
| Other Features | 3D Visualization; Free and Paid Versions; Discontuated; | ||
| OpenHRP3 | Description | Open Architecture Human-centered Robotics Platform version 3 is a platform for robot simulations and software developments, and it is mainly applied for humanoid robot simulations. It allows users to check out a robot model and control program by dynamics simulation. The simulator has a custom dynamics engine and graphical interface. The last version was released in 2012 [93,94]. | |
| Features | Robot Types | Humanoids | |
| Sensors and Actuators | Several Sensors; Several Motors; | ||
| Compatibility | Not Applicable | ||
| Engines | Custom Dynamics Engine; Custom Graphical Engine; | ||
| Programming Languages | C++ | ||
| Other Features | 3D Visualitation; Free to Use; Open-Source; | ||
| jmeSim | Description | jmeSim is an open source, multi-robot platform; it provides high graphical and physical fidelity and also supports ROS integration. It was built on the jMonkey Engine3 game engine. The physics dynamics simulation is performed by jBullet, a Java port of the Bullet Physics Engine Library. The jmeSim offers some environment and robot models, such as the wheeled rescue robot for example, and also provides an array of sensors [58]. | |
| Features | Robot Types | multi-robots | |
| Sensors and Actuators | Several Sensors; Several Motors; | ||
| Compatibility | ROS | ||
| Engines | jBullet; jMonkey; | ||
| Programming Languages | Java | ||
| Other Features | 3D Visualization; Free to Use; Open-Source; | ||
| Khepera | Description | Khepera Simulator is a freeware public domain software written by Oliver Michel, and was designed to simulate the Khepera robot. This package allows the programmer to write control algorithms using C/C++ language. The simulator runs on Unix operational system and it has X11 as graphical interface. This simulator features the ability to drive a real Khepera robot, then the outcome of the simulation test can be easily transferred to a real Khepera robot. No further information about this simulator was found and its website, presented in [95], is not available. | |
| Features | Robot Types | Khepera Robots | |
| Sensors and Actuators | Not Applicable | ||
| Compatibility | Not Applicable | ||
| Engines | X11 | ||
| Programming Languages | C/C++ | ||
| Other Features | 2D Visualization; Free to Use; Discontinuated; | ||
| Delta3D | Description | The simulator Delta3D is an open source game and simulation engine built for military training. Delta3d is a widely used, community-supported, open-source game and simulation engine. Delta3d is appropriate for a wide variety of uses including training, education, visualization and entertainment. Delta3d is unique because it offers features specifically suited to the Modeling, Simulation and DoD communities, such as the High Level Architecture (HLA), After Action Review (AAR), large scale terrain support and SCORM Learning Management System (LMS) integration. It has a modular design integrating other engines such as Open Scene Graph, Open Dynamics Engine, Character Animation Library and OpenAL. The renders engine uses the Open Graphics Library. The last version released was on September 29 2014 and it is held on Github [96,97]. | |
| Features | Robot Types | Not Applicable | |
| Sensors and Actuators | Not Applicable | ||
| Compatibility | Not Applicable | ||
| Engines | Open Scene Graph; ODE; Character Animation Library; OpenAL; Open Graphics Library; | ||
| Programming Languages | C++ | ||
| Other Features | 3D Visualization; Free to Use; Open-Source; Military Purpose; | ||
| MATLAB/ Simulink | Description | MATLAB is a powerful general software that aids scientists, researchers and companies in several engineering/science areas, such as control systems, deep learning, image processing and computer vision, machine learning, predictive maintenance, robotics, signal processing, test and measurement of data and wireless communications. Simulink is a block diagram environment for multi domain simulation and Model-Based Design. It supports system-level design, simulation, automatic code generation and continuous testing and verification of embedded systems. Simulink provides a graphical editor, customized block libraries, and solvers for modeling and simulating dynamic systems. It is integrated with MATLAB, enabling the incorporation of MATLAB algorithms into models and the export of simulation results to MATLAB for further analysis. In the robotics field, MATLAB with Simulink is one of the most used platforms for the modeling and simulation of several systems. Many features can be added for the simulation, as well as the simulation of dynamics and graphical modelling, with the possibility of working in real time. To accomplish these features, it needs to be added that it is called “toolboxes” [1,98,99,100,101]. | |
| Features | Robot Types | Any Robot Type | |
| Sensors and Actuators | Any Type | ||
| Compatibility | Several Possibilities | ||
| Engines | Custom Engine | ||
| Programming Languages | Several Languages Supported | ||
| Other Features | 2D and 3D Visualization; Paid; | ||
| Swarmbot3D | Description | Swambot3d was designed for predicting the 3D kinematics and dynamics of a single s-bot in a swarm-bot. The main characteristics of this simulation environment are: 3D dynamics, compatibility with the s-bot’s hardware and software, interactive control, multi-level models and swarm handling, and it was built using the Vortex physics engine. The simulation models of the environment and robots are defined in an external test file written in XML format. A search was evaluated to find this simulator on the internet and no results were found [102,103,104]. | |
| Features | Robot Types | s-bot | |
| Sensors and Actuators | Available under Modelling | ||
| Compatibility | Not Applicable | ||
| Engines | Vortex | ||
| Programming Languages | XML | ||
| Other Features | Not Applicable | ||
| Creo | Description | In [70] the authors use a different approach to simulate a humanoid robot using its virtual twin. The robot modelling was made using the Creo software from PTC Inc., and the Creo is not a simulator, but the presented approach is an interesting and different way to simulate a robot, differing from the previously shown simulators. Creo is a 3D computer-aided design software for product development with scalable range. Creo has breakthrough innovations in the areas of generative design, real-time simulation, multi-body design, additive manufacturing, and other features. | |
| Features | Robot Types | Not Applicable | |
| Sensors and Actuators | Not Applicable | ||
| Compatibility | Not Applicable | ||
| Engines | Not Applicable | ||
| Programming Languages | Not Applicable | ||
| Other Features | Not Applicable | ||
| Free/Open-Source | Proprietary |
|---|---|
| Box2D | AGX Multiphysics |
| Bullet | Algodoo |
| Cannon.js | Digital Molecular Matter |
| Chipmunk | Chipmunk |
| Newton Game Dynamics | Euphoria |
| Open Dynamics Engine | Havok |
| OPAL | Reactor |
| Physics Abstraction Layer | Vortex |
| PhysX | |
| PhyZ | |
| Project Chrono | |
| Siconos | |
| Simulation Open Framework Architecture |
| Research Questions | Selected Papers |
|---|---|
| 1: In the context of educational robotics, are there any realistic simulators capable of simulating any robot prototype? | [30,32,33,36,37,38] [41,42,43,45,49,50] [51,54,55,56,57,59] [60,62,63,64,66,67] [69,71,73,74,75,76,78] |
| 2: Are these simulators capable of simulating the robot’s sensores and/or actuators? | [30,31,32,33,34,35] [36,38,39,41,42,43] [44,45,46,47,48,49] [50,51,52,53,54,55] [56,57,58,59,60,61] [62,63,64,65,66,67] [68,69,70,71,72,73] [1,74,75,76,77,78] |
| 3: Is such simulation based on physical motors? | [30,31,32,33,34,36] [37,38,40,41,42,43] [46,47,48,49,50,51] [53,55,56,58,60,61] [62,63,64,65,67,68] [1,69,72,73,74,76,77] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Camargo, C.; Gonçalves, J.; Conde, M.Á.; Rodríguez-Sedano, F.J.; Costa, P.; García-Peñalvo, F.J. Systematic Literature Review of Realistic Simulators Applied in Educational Robotics Context. Sensors 2021, 21, 4031. https://doi.org/10.3390/s21124031
Camargo C, Gonçalves J, Conde MÁ, Rodríguez-Sedano FJ, Costa P, García-Peñalvo FJ. Systematic Literature Review of Realistic Simulators Applied in Educational Robotics Context. Sensors. 2021; 21(12):4031. https://doi.org/10.3390/s21124031
Chicago/Turabian StyleCamargo, Caio, José Gonçalves, Miguel Á. Conde, Francisco J. Rodríguez-Sedano, Paulo Costa, and Francisco J. García-Peñalvo. 2021. "Systematic Literature Review of Realistic Simulators Applied in Educational Robotics Context" Sensors 21, no. 12: 4031. https://doi.org/10.3390/s21124031
APA StyleCamargo, C., Gonçalves, J., Conde, M. Á., Rodríguez-Sedano, F. J., Costa, P., & García-Peñalvo, F. J. (2021). Systematic Literature Review of Realistic Simulators Applied in Educational Robotics Context. Sensors, 21(12), 4031. https://doi.org/10.3390/s21124031