
Towards the Design of Efficient and Secure Architecture for Software-Defined Vehicular Networks

 ,
,  , ,
, ,  , and
, and 
Abstract
1. Introduction
1.1. Contributions
- 1.
- We highlight the network vulnerabilities and address the identified threat vectors to design a secure hierarchical architecture for SDVN with minimal resource utilization.
- 2.
- Our proposed novel and secure hierarchic architecture have improved the secure communication from vehicle to vehicle, vehicles to RSU, and vehicle to infrastructure. Moreover, we use the PKI-based digital signature scheme to secure communication between V2V and V2I to protect networks from adversaries attacks.
- 3.
- Additionally, we have used the concept of a three-way handshake mechanism to establish a reliable connection between the main and sub SDN controllers for a secure key generation along with forwarding secure data dissemination.
- 4.
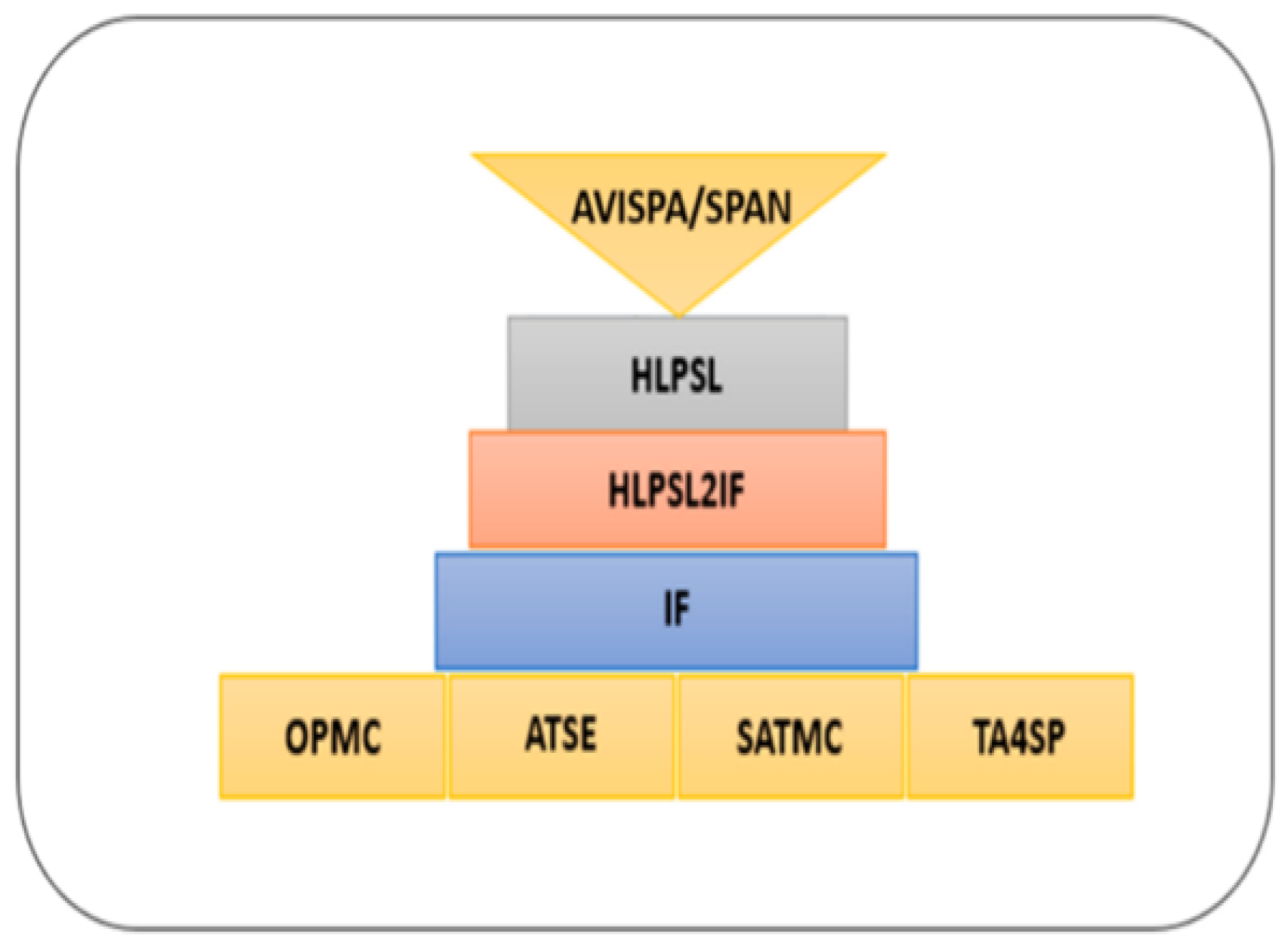
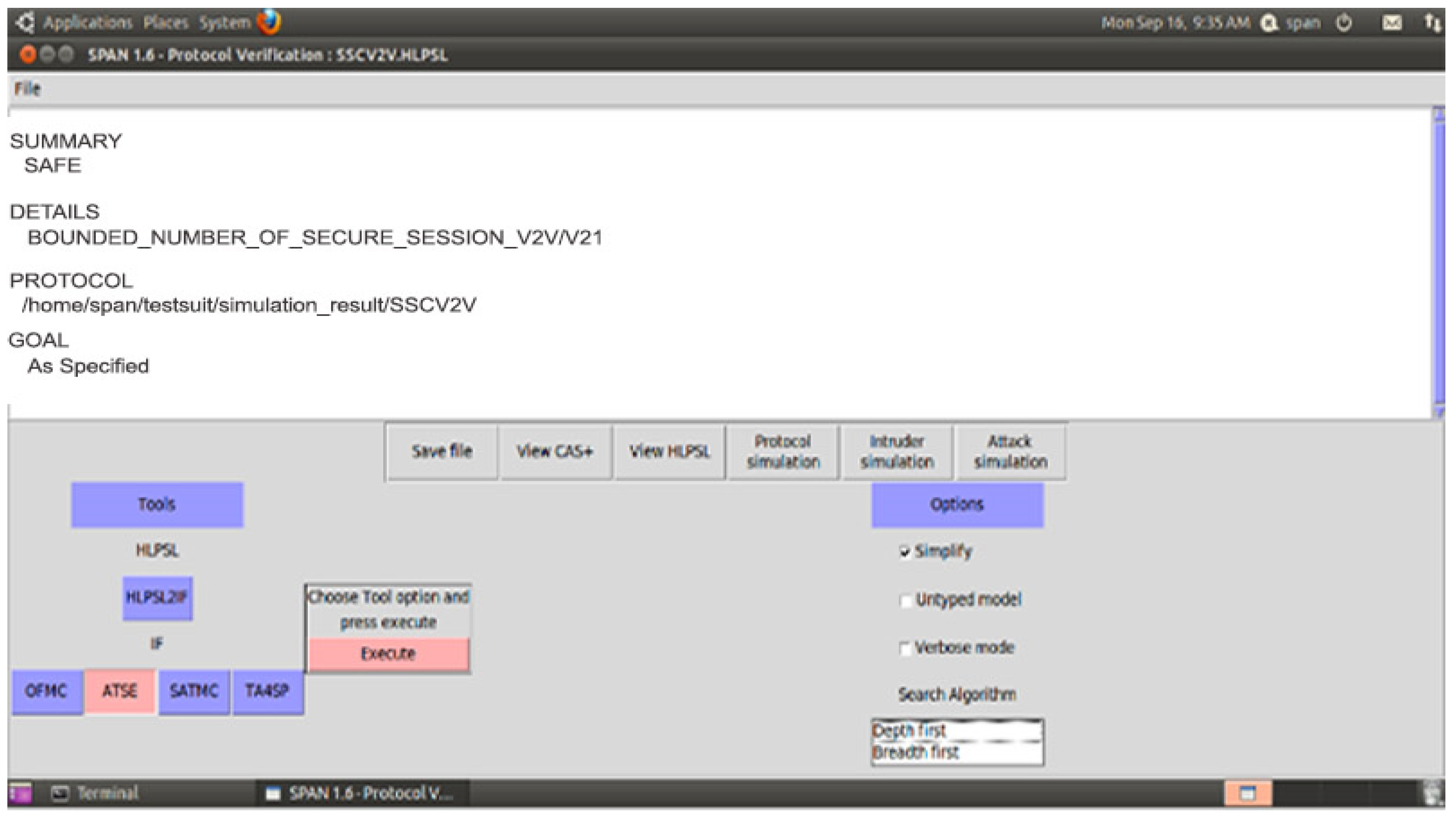
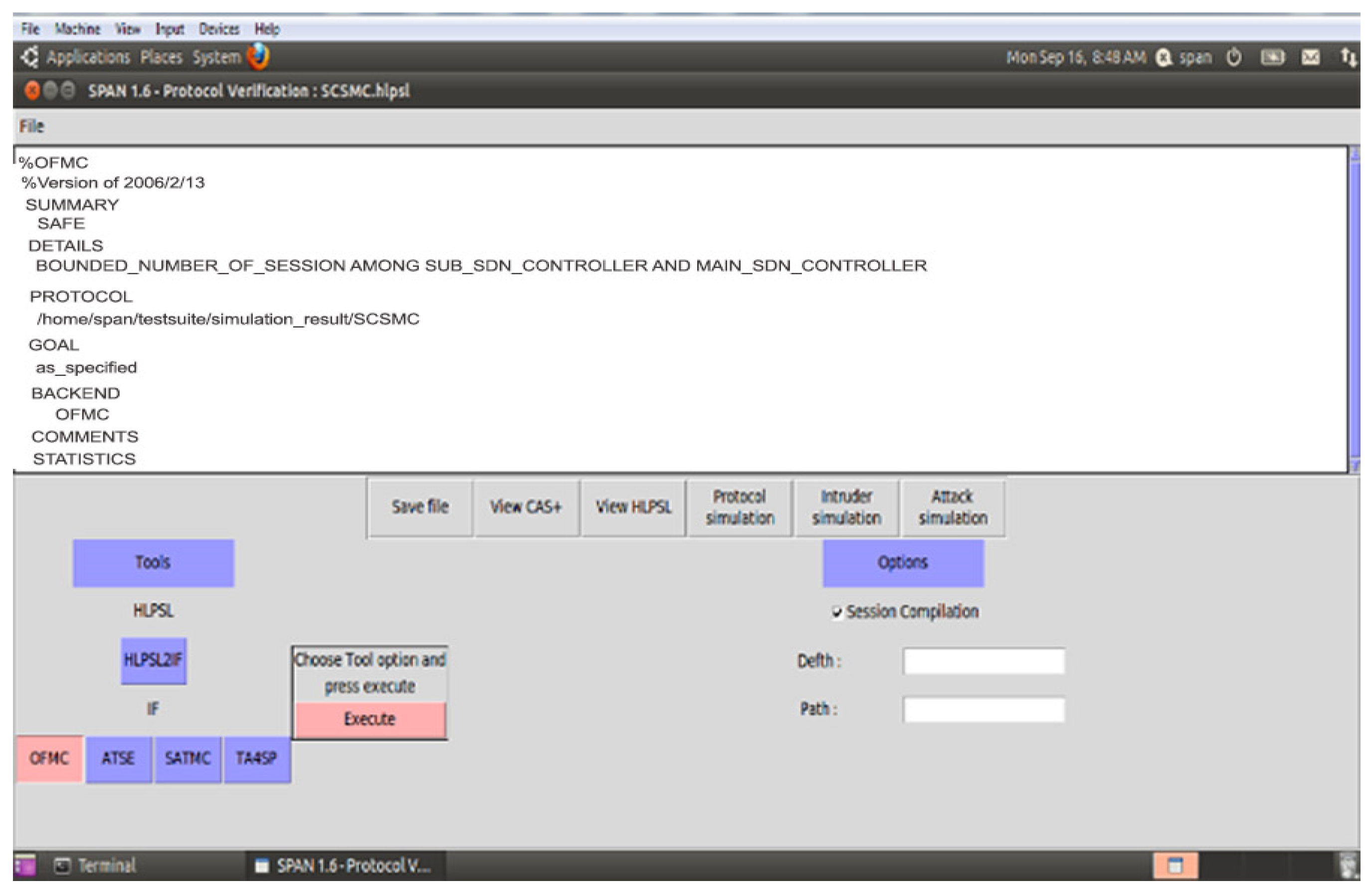
- The proposed model is validated and proved using the simulation tool AVISPA for better performance.
- 5.
- Moreover, we have validated our proposed architecture’s fundamental security properties using a formal security method.
1.2. Paper Organization
2. Related Work
2.1. Overview of VANETs
2.2. Overview of SDVN Architecture
2.3. Security Schemes in SDN and SDVN
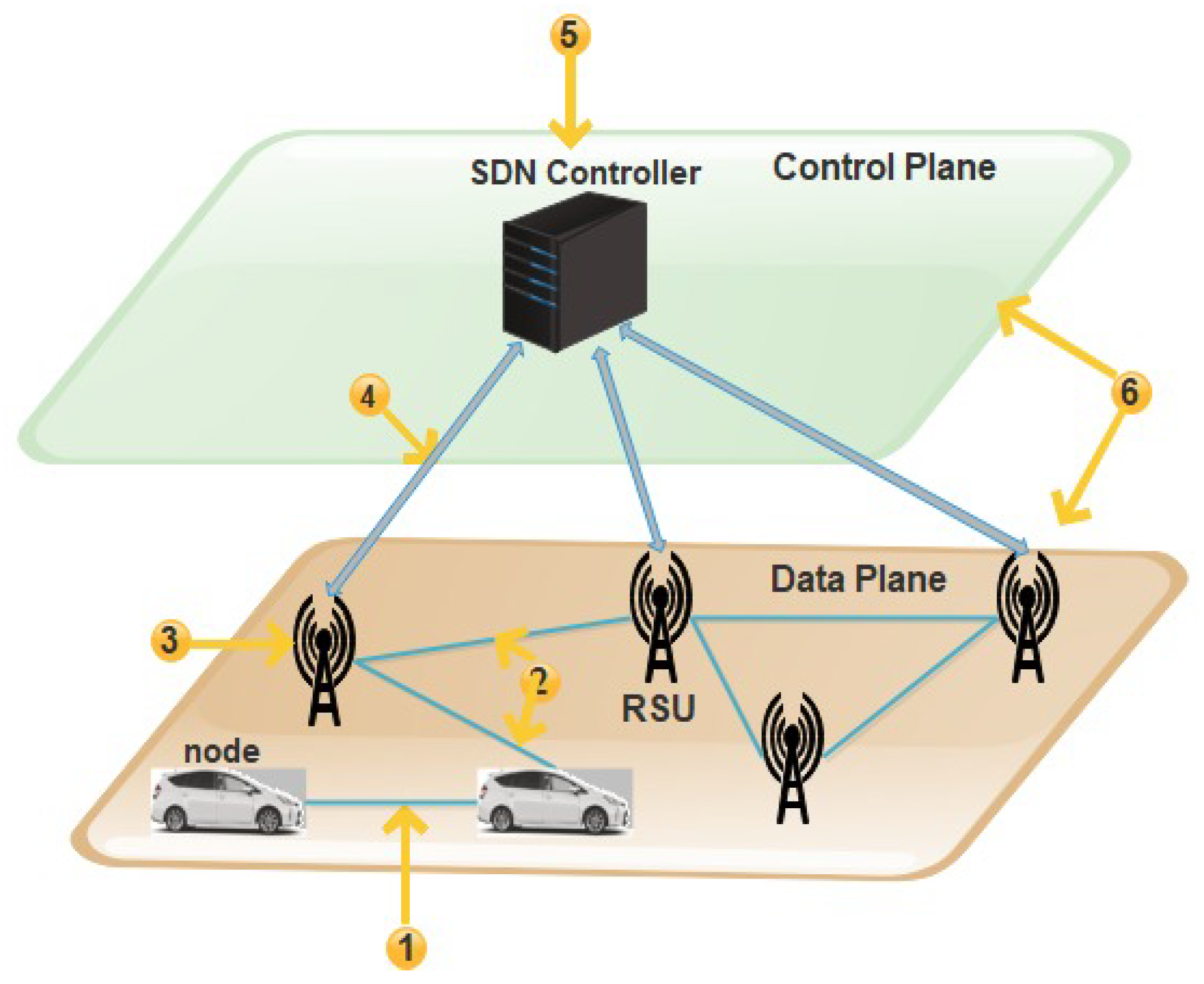
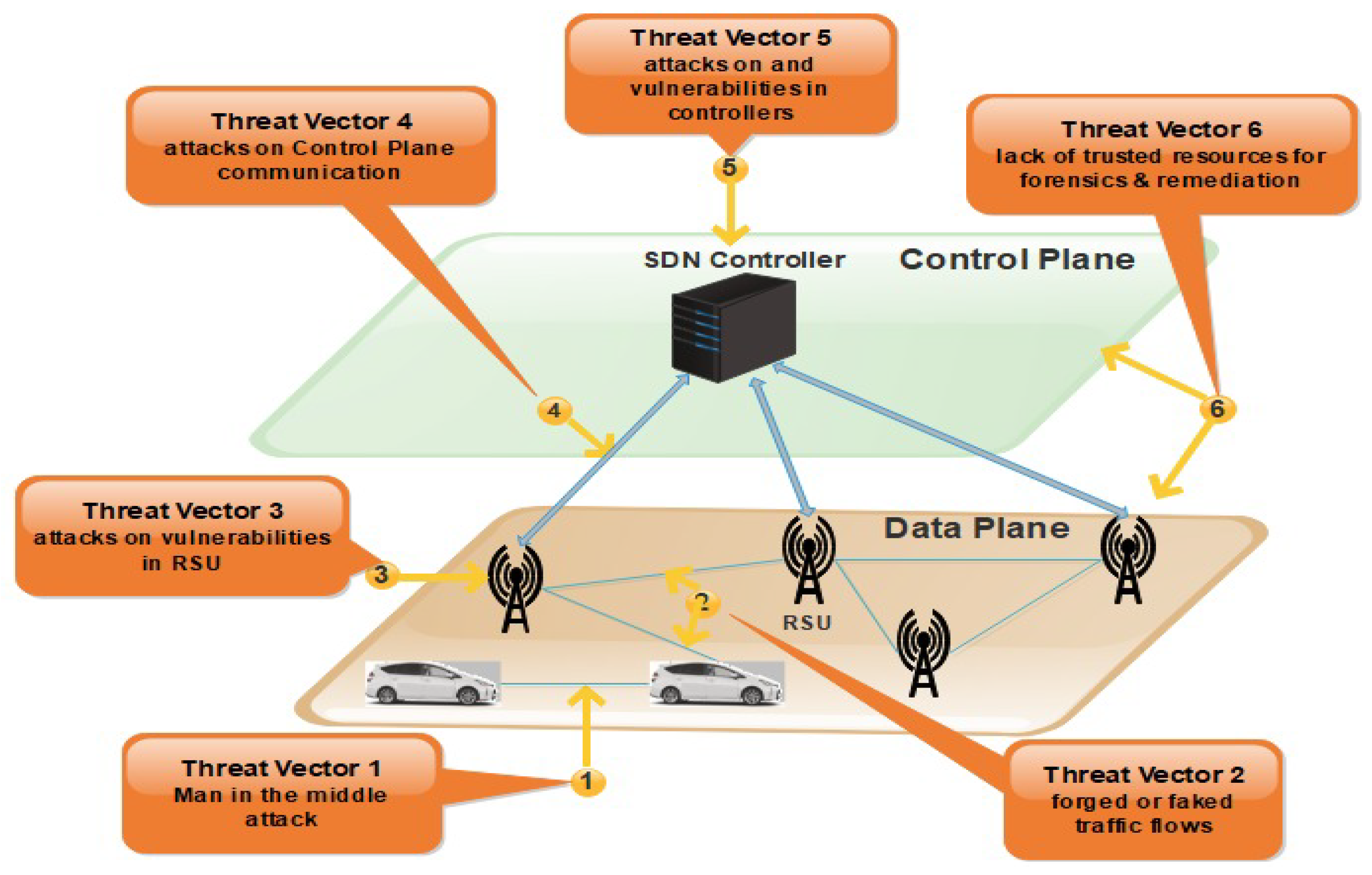
2.4. Issues and Vulnerabilities in SDVN
3. Proposed Scheme
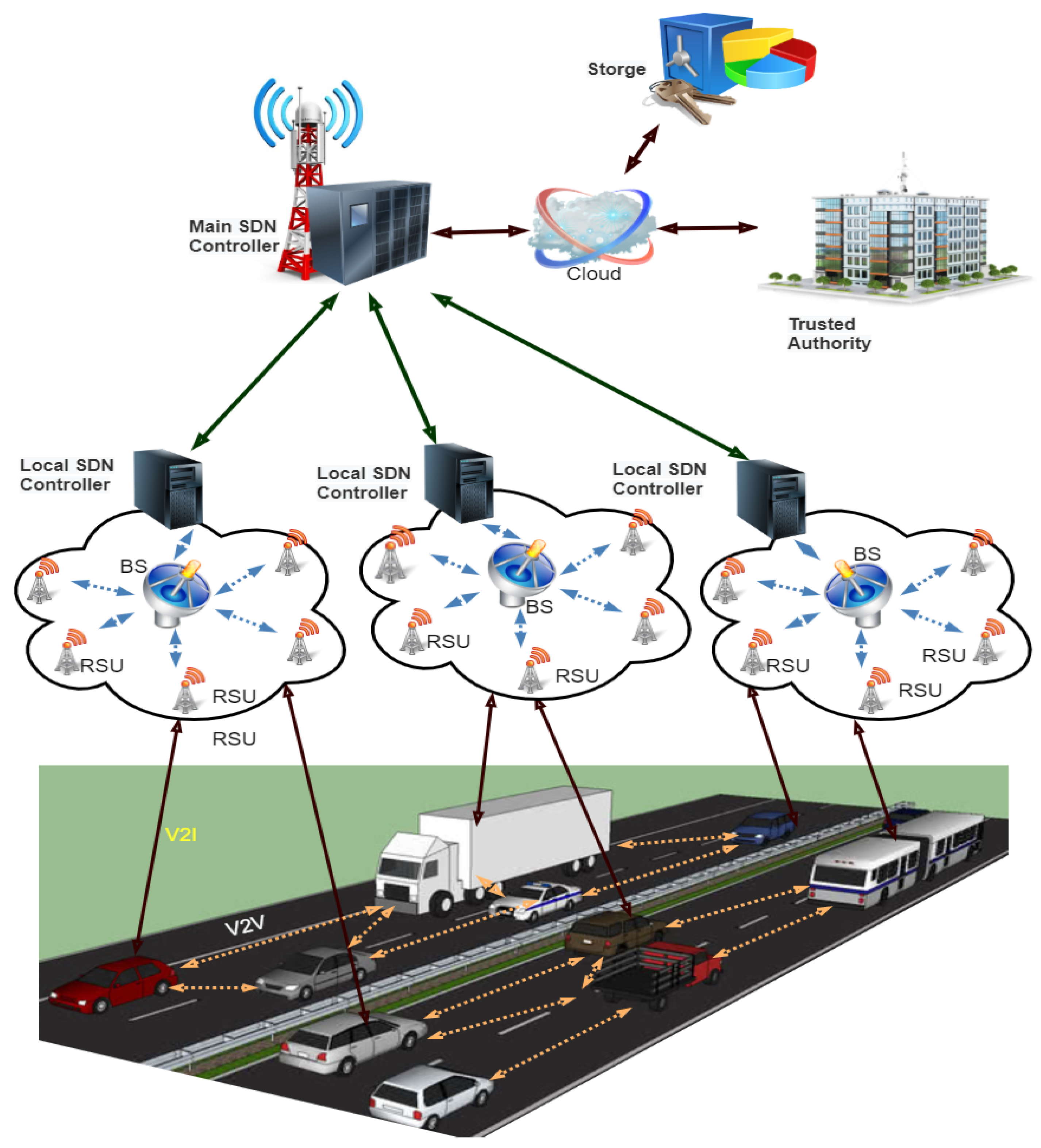
3.1. Network Model
3.2. SDN Controller
3.3. SDN Road Side Unit
3.4. SDN Nodes
3.5. Trusted Authority
- 1
- The registration of vehicles;
- 2
- To authenticate the registered users to VANET and manage security parameters, including all the access parts.
3.6. SDN Cloud
3.7. Proposed Security Mechanism
3.7.1. Secure Communication between Vehicle to Vehicle
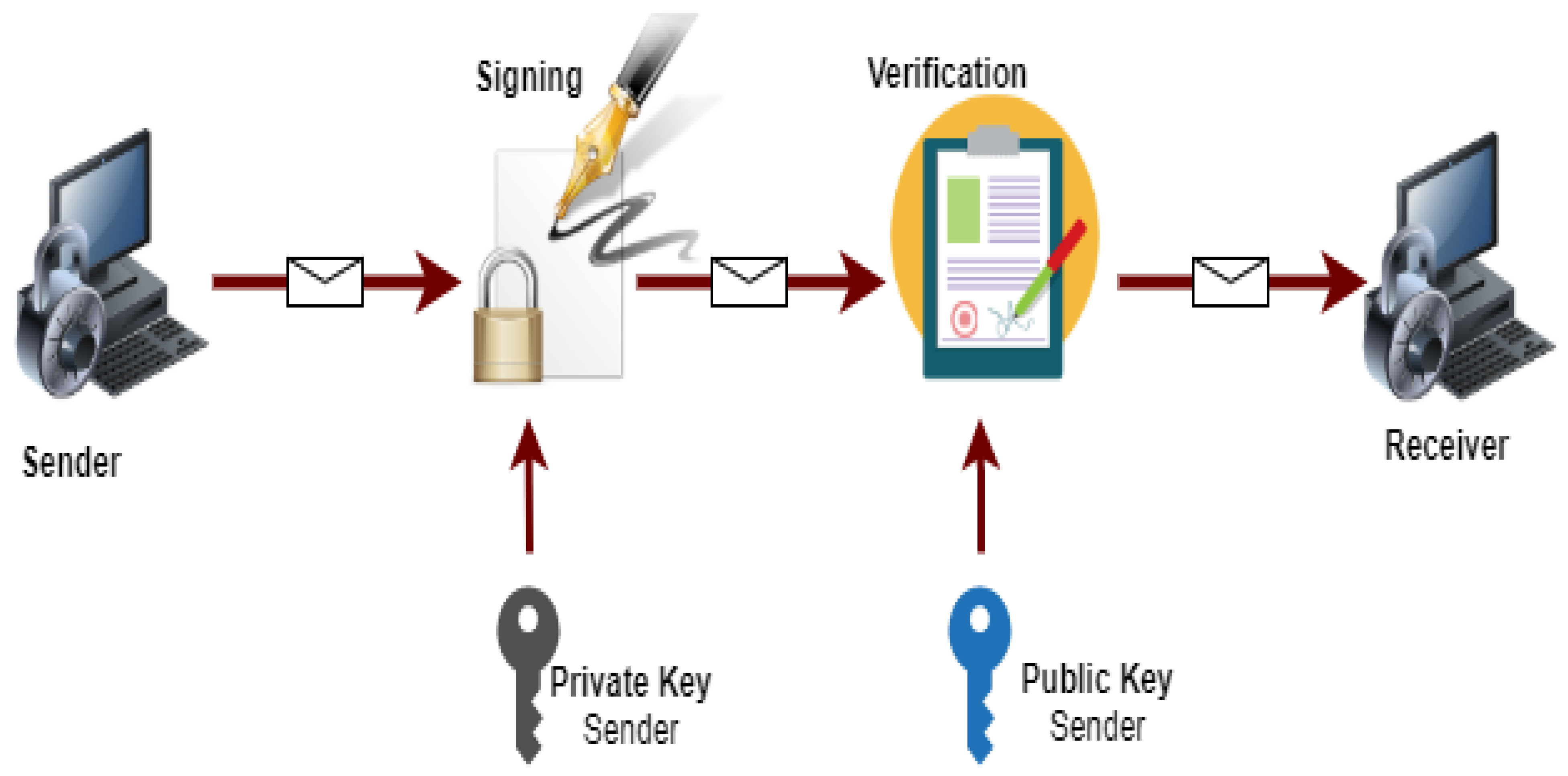
3.7.2. Secure Digital Signature
3.7.3. Signing and Verification Process Using Proposed Digital Signature Algorithm
| Algorithm 1: Proposed digital signature algorithm. |
| Input: n,, |
| Output: Vehicles key pairs, i.e., public and private, the master secret key of RSU () |
|
| Signature: |
| For all registered vehicles and RSU do |
|
| End for |
| Verifying: |
|
3.7.4. PKI Based Digital Signature Scheme
- 1.
- The sender sends a request to the Registration Authority (RA) with their public key for issuing the certificate.
- 2.
- The RA verifies the sender’s request and forwards it to the CA.
- 3.
- The CA issues the certificate with their public key, stores this certificate to the repository, and sends a copy to Validation Authority (VA).
- 4.
- Then, this certificate is back sent to the sender.
- 5.
- After that, the sender sends this certificate along with a digital signature to the receiver.
- 6.
- When a recipient receives this certificate, it is further sent to the VA to check the certificate’s validity. The VA checks three things; first, it checks that the certificate is valid; if the certificate is valid, then it sends a message to a receiver that the certificate is valid; second, in case of the invalid certificate, the receiver will not regard the message; third, if the sender has no certificate validity at all, the receiver considers that this is the malicious user.
- 7.
- After checking the validity, the VA sends it back to the receiver.After the above process, secure communication will be established from V2V.
3.7.5. Secure Communication between Vehicles and RSU
- 1.
- The vehicle sends a message to a public directory that contains a request and timestamp for the current public key of RSU.
- 2.
- The public key authority responds to an encrypted vehicle message with the authority’s private key (PR-auth). The decryption of the message is done using the public key of the authority by the vehicle.
- 3.
- The message includes the public key of RSU, the original request, and the original timestamp.
- 4.
- The vehicle stores the RSU public key. For encrypting the message, an identifier of the vehicle (IDA) and a nonce (N1) are used for unique identification.
- 5.
- The RSU sends a message to a public directory containing a request and timestamp for its current public key.
- 6.
- As usual, the public key authority responds to the RSU message and retrieves the vehicle’s public key. In this way, the public keys have been securely delivered to the vehicle and RSU to protect an intruder’s communication.
- 7.
- When the RSU is sending a message to the vehicle using the public key of the vehicle (PUa) with a nonce (N1) and RSU generates a new nonce (N2) to assure that this vehicle and RSU are correspondents to each other.
- 8.
- With the help of the public key of RSU, the vehicle encrypts the message and returns nonce (N2) to RSU to ensure the exact correspondent.
3.7.6. Secure Communication between Main SDN Controller and Sub SDN Controller
- 1.
- Any controller has its master keys like a master public key () and master private key ().
- 2.
- Master public keys of both are exchanged publically.
- 3.
- The sub SDN controller sends a message to the main SDN controller that contains , a nonce (N), and a timestamp that is encrypted with the public key of the central SDN controller.
- 4.
- The central SDN controller decrypts the message with their private key, gaining the original message, and responding sub SDN controller message that includes , timestamp, and adds one nonce () and is encrypted using the public key of sub SDN controller.
- 5.
- The sub SDN controller decrypts the message using their private key to gain the original message that contains , timestamp, and nonce plus one ().
- 6.
- Therefore, the main and sub SDN controllers have one nonce (N) and nonce plus one (). They perform an operation on nonce values to produce a secret session key after establishing a secure connection.
3.8. Deployment of Proposed Efficient and Secure SDVN Architecture
3.9. Registration Phase of Vehicle
3.10. Vehicle Authentication Phase
- In our proposed scheme for the authentication process, each vehicle sends its credential to the nearest RUS, such as vehicle ID () and position area ().
- The concerned RSU matched the pre-stored vehicle ID () with received vehicle ID () if both vehicle ID ( ) is matched, then authentication is granted. Otherwise, vehicles are isolated from the networks to protect the data from adversaries’ attacks.
- RSU verify the revocation ID polynomial, in case vehicle ID () revoked then = 0, then verify the location area (), if the location is within the RSU range so generated random number (). Additionally, to protect the SDVN from replay attack, we apply the timestamp ( in our proposed architecture.
- When RSU received the encrypted message from the vehicle in a particular range, it will check the timestamp ( validity within the allowable range; if timestamp is found to be correct, then connection established discard the connection.
- Vehicles generate the token () = (), () = h, and transmits toward the RSU. Then, RSU authenticates the token and random number ().
3.11. Key Update Phase
4. Proposed Scheme Performance Analysis
4.1. Security Analysis
4.1.1. Formal Proof of Security Module
- 1.
- 2.
- S =Where
- 3.
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
4.1.2. Security Models Validation Using AVISPA
4.2. Comparative Analysis
4.2.1. Security Properties Comparison
- 1.
- Mutual Authentication (SP1): Authentication is the vital parameter for verifying participating vehicles for onward secure communication using public networks in the SDVN environment. In our proposed secure architecture, we have applied the PKI-based standard digital signature mechanism for mutual authentication among vehicle to vehicle, vehicle to RSU, and vehicle to infrastructure to isolate the networks’ illegal vehicles.
- 2.
- Resist Intruder Attacks (SP2): The use of a private key and other parameters such as random numbers and timestamps in the PKI-based digital signature process during authentication has protected the proposed SDVN architecture from intruder attacks.
- 3.
- Provision of Anonymity (SP3): We have achieved obscurity using valid and fresh tokens in the proposed secure architecture during the signing and verification process. Additionally, for secure communication among RUS and vehicles, new parameters such as random number, timestamp, location, and PKI-based, the private key will be generated to enhance the security and privacy of the proposed SDVN architecture.
- 4.
- Protect Reply Attack (SP4): To protect our proposed efficient and secure architecture from replay attack while disseminating information from vehicle to vehicle, vehicle to RSU, and vehicle to the infrastructure, we have concatenated the valid and fresh timestamp with data to protect reply attack. Furthermore, the participating nodes in the proposed SDVN can discard the late transmitted information to protect the targeted nodes from wrong decision-making during traveling.
- 5.
- Protect Spoofing Attack (SP5): In the proposed secure architecture of SDVN, the intruders cannot spoof the RSU, CA, and vehicles’ identity because the secure token is generated using the participating nodes’ private keys. Moreover, verification authority is used to verify the received public keys’ authenticity in the destination node.
- 6.
- Data Authentication (SP6): In the proposed PKI-based digital signature scheme for SDVN, we have authorized data source and integrity using assembled vehicle ID and key pairs to authenticate the data. If vehicle data is valid, it will be stored in the intelligent transportation system database for future decision-making activities; otherwise, it will be rejected. The concerned illegal vehicle is isolated from the VANET to improve the networks’ security and discard false transmission.
- 7.
- Resist man in the middle Attack (SP7): The concerned private and public vehicle credentials in the proposed PKI-based digital signature scheme are used to establish the authentication tokens. Moreover, after three-way handshaking, the secret session key is used to secure the transmission of information between vehicle to RSU and vehicle to infrastructure to protect the information from forge. At the same time, the intermediate nodes cannot access confidential information using an illegal way.
- 8.
- Forward Secrecy (SP8): To enhance the security of SDVN, in our proposed architecture, the computed secret session key is updated after a specific time interval, and adversaries cannot access the sensitive data of vehicles by guessing the previous session key of the networks.
- 9.
- Backward Secrecy (SP9): Using this feature in our proposed architecture, we have prevented the vehicle’s information from illegal usage. Furthermore, intruders cannot access the old transmitted information in case of session key exposure.
4.2.2. Cost Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Borcoci, E. From vehicular Ad-hoc networks to internet of vehicles. In Proceedings of the NexComm 2017 Conference, Venice, Italy, 23–27 April 2017; pp. 23–27. [Google Scholar]
- Kalinin, M.O.; Krundyshev, V.M.; Semianov, P.V. Architectures for building secure vehicular networks based on SDN technology. Autom. Control Comput. Sci. 2017, 51, 907–914. [Google Scholar] [CrossRef]
- Kreutz, D.; Fern, O.M.V.R.; Paulo, E.V.; Christian, E.R.; Siamak, A.; Steve, U. Software-defined networking: A comprehensive survey. Proc. IEEE 2014, 103, 14–76. [Google Scholar] [CrossRef]
- Malagar, E.V.; Kumar, M. A comparative analysis of routing protocols in vehicular ad hoc network. Int. J. Adv. Res. Electron. Commun. Eng. 2017, 6, 378–389. [Google Scholar]
- Sadio, O.; Ngom, I.; Lishou, C. SDN architecture for intelligent vehicular sensors networks. In Proceedings of the 2018 UKSim-AMSS 20th International Conference on Computer Modelling and Simulation (UKSim), Cambridge, UK, 27–29 March 2018; pp. 139–144. [Google Scholar]
- Toufga, S.; Slim, A.; Hamza, T.A.; Philippe, O.; Thierry, V. Towards Dynamic Controller Placement in Software Defined Vehicular Networks. Sensors 2020, 20, 1701. [Google Scholar] [CrossRef] [PubMed]
- Nkenyereye, L.; Nkenyereye, L.; Islam, S.M.R.; Kerrache, C.A.; Abdullah-Al-Wadud, M.; Alamri, A. Software defined network-based multi-access edge framework for vehicular networks. IEEE Access 2019, 8, 4220–4234. [Google Scholar] [CrossRef]
- Khadir, A.A.; Senoo, S.A.H. SDN-based offloading policy to reduce the delay in fog-vehicular networks. Peer-to-Peer Netw. Appl. 2021, 1–15. [Google Scholar] [CrossRef]
- Yaqoob, I.; Iftikhar, A.; Ejaz, A.; Abdullah, G.; Muhammad, I.; Nadra, G. Overcoming the key challenges to establishing vehicular communication: Is SDN the answer? IEEE Commun. Mag. 2017, 55, 128–134. [Google Scholar] [CrossRef]
- Balamurugan, V. An Intelligent Framework for Vehicular Ad-Hoc Networks Using SDN Architecture. IJCSN Int. J. Comput. Sci. Netw. 2014, 3, 2277–5420. [Google Scholar]
- Vasudev, H.; Debasis, D. A trust based secure communication for software defined VANETs. In Proceedings of the 2018 International Conference on Information Networking (ICOIN), Chiang Mai, Thailand, 10–12 January 2018; pp. 316–321. [Google Scholar]
- Kalinin, M.; Zegzhda, P.; Zegzhda, D.; Vasiliev, Y.; Belenko, V. Software defined security for vehicular ad hoc networks. In Proceedings of the 2016 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 19–21 October 2016; pp. 533–537. [Google Scholar]
- Peng, H.; Sun, Z.; Zhao, X.; Tan, S.; Sun, Z. A detection method for anomaly flow in software defined network. IEEE Access 2018, 6, 27809–27817. [Google Scholar] [CrossRef]
- Mousavi, S.M.; St-Hilaire, M. Early detection of DDoS attacks against SDN controllers. In Proceedings of the 2015 International Conference on Computing, Networking and Communications (ICNC), Garden Grove, CA, USA, 16–19 February 2015; pp. 77–81. [Google Scholar]
- Zhou, Y.; Liu, S.; Xiao, M.; Deng, S.; Wang, X. An efficient V2I authentication scheme for VANETs. Mob. Inf. Syst. 2018, 2018, 1–11. [Google Scholar] [CrossRef]
- Iqbal, J.; Waheed, A.; Zareei, M.; Umar, A.I.; Amin, N.U.; Aldosary, A.; Mohamed, E.M. A Lightweight and Secure Attribute-Based Multi Receiver Generalized Signcryption Scheme for Body Sensor Networks. IEEE Access 2020, 8, 200283–200304. [Google Scholar] [CrossRef]
- Waheed, A.; Umar, A.I.; Zareei, M.; Din, N.; Amin, N.U.; Iqbal, J.; Saeed, Y.; Mohamed, E.M. Cryptanalysis and improvement of a proxy signcryption scheme in the standard computational model. IEEE Access 2020, 8, 131188–131201. [Google Scholar] [CrossRef]
- Waheed, A.; Din, N.; Umar, A.I.; Ullah, R.; Amin, N.-U. Novel Blind Signcryption Scheme for E-Voting System Based on Elliptic Curves. Mehran Univ. Res. J. Eng. Technol. 2021, 40, 314–322. [Google Scholar] [CrossRef]
- Iqbal, J.; Umar, A.I.; Amin, N.; Waheed, A. Efficient and secure attribute-based heterogeneous online/offline signcryption for body sensor networks based on blockchain. Int. J. Distrib. Sens. Netw. 2019, 15. [Google Scholar] [CrossRef]
- Akhunzada, A.; Ahmed, E.; Gani, A.; Khan, M.K.; Imran, M.; Guizani, S. Securing software defined networks: Taxonomy, requirements, and open issues. IEEE Commun. Mag. 2015, 53, 36–44. [Google Scholar] [CrossRef]
- Arif, M.; Wang, G.; Geman, O.; Balas, V.E.; Tao, P.; Brezulianu, A.; Chen, J. Sdn-based vanets, security attacks, applications, and challenges. Appl. Sci. 2020, 10, 3217. [Google Scholar] [CrossRef]
- Shafiq, H.; Rehman, R.A.; Kim, B.-S. Services and security threats in sdn based vanets: A survey. Wirel. Commun. Mob. Comput. 2018, 2018, 1–14. [Google Scholar] [CrossRef]
- Adnan, M.; Iqbal, J.; Waheed, A.; Amin, N.; Zareei, M.; Goudarzi, S.; Umer, A. On the Design of Efficient Hierarchic Architecture for Software Defined Vehicular Networks. Sensors 2021, 21, 1400. [Google Scholar] [CrossRef] [PubMed]
- Ning, W.; Hao, D.; Yang, Y.; Kun, M.; Yu, C. A task scheduling algorithm based on qos and complexity-aware optimization in cloud computing. Natl. Dr. Acad. Forum Inf. Commun. Technol. 2013, 2013, 5. [Google Scholar]
- Panwar, N.; Sarita, N.; Manmonan, S.; Rauthan, M.A.Y.; Aggarwal, A.N.K.; Pragya, J. An enhanced scheduling approach with cloudlet migrations for resource intensive applications. J. Eng. Sci. Technol. 2018, 13, 2299–2317. [Google Scholar]
- Ullah, I.; Amin, N.U.; Khan, J.; Rehan, M.; Naeem, M.; Khattak, H.; Khattak, S.J.; Ali, H. A novel provable secured signcryption scheme: A hyper-elliptic curve-based approach. Mathematics 2019, 7, 686. [Google Scholar] [CrossRef]
- Zhong, H.; Wen, J.; Cui, J.; Zhang, S. Efficient conditional privacy-preserving and authentication scheme for secure service provision in VANET. Tsinghua Sci. Technol. 2016, 21, 620–629. [Google Scholar] [CrossRef]
- Azees, M.; Vijayakumar, P.; Deboarh, L.J. EAAP: Efficient anonymous authentication with conditional privacy-preserving scheme for vehicular ad hoc networks. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2467–2476. [Google Scholar] [CrossRef]
- Dua, A.; Kumar, N.; Das, A.K.; Susilo, W. Secure message communication protocol among vehicles in smart city. IEEE Trans. Veh. Technol. 2018, 67, 4359–4373. [Google Scholar] [CrossRef]
- Garg, S.; Kaur, K.; Kaddoum, G.; Ahmed, S.H.; Jayakody, D.N.K. Jayakody. SDN-based secure and privacy-preserving scheme for vehicular networks: A 5G perspective. IEEE Trans. Veh. Technol. 2019, 68, 8421–8434. [Google Scholar] [CrossRef]
- Raja, G.; Anbalagan, S.; Vijayaraghavan, G.; Dhanasekaran, P.; Al-Otaibi, Y.D.; Bashir, A.K. Energy-Efficient End-to-End Security for Software Defined Vehicular Networks. IEEE Trans. Ind. Inform. 2021, 17, 5730–5737. [Google Scholar] [CrossRef]
- Cao, X.; Kou, W.; Du, X. A pairing-free identity-based authenticated key agreement protocol with minimal message exchanges. Inf. Sci. 2010, 180, 2895–2903. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| OBUs | Onboard Units |
| TPD | Tamper Proof Devices |
| MEC | Multi-access Edge Computing |
| OLSR | Optimize Link State Routing |
| DB | Distance Based |
| SDS | Software-Defined Security |
| IND -CCA2 | Indistinguishable Chosen Ciphertext Attack |
| EUF-CMA | Existentially Unforgeable Chosen Message Attack |
| DDHP | Disional Deffie Helleman Problem |
| SSCV2V | Secure Session Communication between V2V |
| SCSMC | Secure communication between the sub and main SDN controllers |
| PR-auth | Authority’s private key |
| IDA | Identifier of the vehicle A |
| N | Nonce |
| PUa | Public key of the vehicle |
| MPUK | Master public key |
| MPRK | Master private key |
| IDMain | ID of Main SDN controller |
| RID | RSU ID |
| VID | Vehicle ID |
| pi | Position area |
| Tsi | Timestamp |
| Ri | Random number |
| l1 | Token |
| sn-1 | Last round session key |
| Lm-1 | Last round message |
| p | Prime number |
| x | Random number |
| VPrk | Vehicle private key |
| VPuk | Vehicle public key |
| SDNmsk | SDN controller master secret key |
| RSUprk | RSU private key |
| Scheme | SP1 | SP2 | SP3 | SP4 | SP5 | SP6 | SP7 | SP8 | SP9 |
|---|---|---|---|---|---|---|---|---|---|
| Zhong et al. [27] | ✕ | ✓ | ✓ | ✓ | ✕ | ✓ | ✓ | ✕ | ✕ |
| Azees et al. [28] | ✕ | ✓ | ✓ | ✕ | ✓ | ✕ | ✓ | ✓ | ✕ |
| Dua et al. [29] | ✓ | ✕ | ✓ | ✓ | ✕ | ✓ | ✓ | ✓ | ✕ |
| Sehil et al. [30] | ✓ | ✓ | ✕ | ✓ | ✓ | ✕ | ✕ | ✕ | ✕ |
| Gunasakaran et al. [31] | ✓ | ✕ | ✓ | ✕ | ✓ | ✓ | ✕ | ✓ | ✕ |
| Proposed architecture | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| Scheme | Transmission Cost (in Bits) | Processing Cost (in Seconds) | No. of Messages Exchanged |
|---|---|---|---|
| Zhong et al. [27] | 823 832 n | 0.0171 n + 0.1197 | 1 |
| Azees et al. [28] | 7488 | 1 | |
| Dua et al. [29] | 2144 | 3 | |
| Sehil et al. [30] | 1568 | 5 | |
| Gunasakaran et al. [31] | 1632 | 4 | |
| Proposed Architecture | 1226 | 0.112 | 3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Adnan, M.; Iqbal, J.; Waheed, A.; Amin, N.U.; Zareei, M.; Umer, A.; Mohamed, E.M. Towards the Design of Efficient and Secure Architecture for Software-Defined Vehicular Networks. Sensors 2021, 21, 3902. https://doi.org/10.3390/s21113902
Adnan M, Iqbal J, Waheed A, Amin NU, Zareei M, Umer A, Mohamed EM. Towards the Design of Efficient and Secure Architecture for Software-Defined Vehicular Networks. Sensors. 2021; 21(11):3902. https://doi.org/10.3390/s21113902
Chicago/Turabian StyleAdnan, Muhammad, Jawaid Iqbal, Abdul Waheed, Noor Ul Amin, Mahdi Zareei, Asif Umer, and Ehab Mahmoud Mohamed. 2021. "Towards the Design of Efficient and Secure Architecture for Software-Defined Vehicular Networks" Sensors 21, no. 11: 3902. https://doi.org/10.3390/s21113902
APA StyleAdnan, M., Iqbal, J., Waheed, A., Amin, N. U., Zareei, M., Umer, A., & Mohamed, E. M. (2021). Towards the Design of Efficient and Secure Architecture for Software-Defined Vehicular Networks. Sensors, 21(11), 3902. https://doi.org/10.3390/s21113902