1. Introduction
China has become the world leader in the scale and speed of tunnel and underground engineering construction. The workload of structural deformation and hazard detection of operating tunnels is enormous. For many years, China has faced three recognized problems: “difficulty in measuring comprehensively, difficulty in measuring accurately and difficulty in measuring quickly” [
1]. The traditional precise measurement adopts the total-station, artificial static and discrete observation, which cannot meet the demand for large-scale, continuous, dynamic and high-precision measurement in tunnel operation and maintenance management [
2].
With the spread of China’s urbanization and the rapid increase in the urban population, the demand for transportation is increasing, and there are more and more subway construction projects in major cities. Subway tunnels have obvious advantages and are widely used in urban construction [
3]. A subway is generally narrow in space and complex in environment. A tunnel often deforms under the influence of ground construction facilities and underground construction environment. Subway accidents can cause significant safety hazards and economic losses [
4]. Tunnel deformation monitoring needs high precision, high frequency and high timeliness, but at the same time, the environment is complex, the daylight time is short, and the traditional manual operation mode is inadequate for meeting the requirements of subway monitoring [
5].
Dynamic detection and monitoring based on laser scanner integration technology is an important developmental direction of tunnel precision measurement. Lidar technology is a new and sophisticated technology gradually developed from the mid-to-late 20th century. It is an active remote sensing technology used to measure the distance between the sensor and the target using the laser emitted by the sensor [
6]. Lidar scanning systems can efficiently and quickly obtain the external information of the target and have been widely used in the surveying and mapping industry [
7]. According to different scanning methods, it can be divided into station scanning and mobile scanning. In mobile scanning, vehicle-borne mobile measurement technology has become an important technical means to obtain high-resolution spatial information because of its advantages of high precision, high resolution, convenient operation, real-time, nighttime measurement, high efficiency, short mapping cycle, and the continuous and dynamic measurement. Its emergence and development provide a new technical means for the acquisition of three-dimensional spatial information [
8].
The 3D scanner is based on the principle of laser ranging. By recording the distance and the horizontal and vertical angles and reflectance, and, based on these elements, by calculating the 3D coordinates of a large number of dense points on the surface of the measured object, it can quickly reconstruct the 3D model of the measured object and various map data such as lines, surface and volume [
9,
10,
11,
12]. Mobile laser scanning technology, because of its fast, accurate and convenient measurement advantages, is becoming a popular technology in today’s construction, maintenance, and measurement activities.
Mobile laser scanning usually obtains the point cloud data in a relative coordinate system first, then processes the point cloud data, maintains the linear restoration, and generates the point cloud data in an absolute coordinate system. In some environments with weak or non-existent GPS signals, such as mountain roads, subway tunnels and indoor spaces, it is impossible to obtain 3D information without the help of a high-precision POS system. For this reason, in tunnel engineering, we often abandon the real three-dimensional information and choose the relative measurement method to evaluate the deformation of tunnel structure. As a result, the real three-dimensional space consistency with a horizontal curve and vertical curve is linear, which is not convenient for the integration and sharing of the real space display of results with other structure monitoring or management systems. Therefore, it is necessary to achieve absolute control of relative data.
Data-driven and model-driven methods can be used to locate point cloud data. The traditional precision measurement adopts an artificial static discrete observation and geometric model calculation method, which cannot meet the requirements of large-scale, high-precision, continuous and dynamic measurement in complex conditions such as tracks. In recent years, dynamic observation and dynamic precision measurement of multi-source spatiotemporal data based on multi-sensor integration technology have made great progress in the field of track operation detection and measurement. At present, mobile measurement is generally composed of GNSS and IMU. Its long-term absolute accuracy mainly depends on GNSS, and the accuracy of GNSS is mainly affected by the measurement environment [
13,
14,
15]. In indoor areas and underground spaces, if only relying on INS, the positioning and attitude errors will accumulate rapidly with time, and the error will increase to the upper limit of measurement tolerance in a short time. At this time, how to limit the INS error divergence to maintain a higher absolute accuracy is the main problem of mobile measurement without GNSS.
In recent years, in order to make efficient use of land, a large number of tunnels have been built in Chinese cities, especially as subway projects. In order to carry out inspection, maintenance and construction authorization, it is necessary to carry out accurate measurement of the tunnel [
16]. Because GNSS cannot be used in subway tunnel positioning, it is necessary to measure and obtain 3D point cloud data based on control points in the tunnel or design data by integrating a variety of sensors, such as a 3D laser scanner, odometer and gauge-measuring instrument [
17,
18,
19]. Because only the cross-section data under the relative coordinate system are needed for the tunnel clearance measurement, convergence diameter, dislocation deformation detection, etc. [
20,
21], the Mobile Tunnel Measurement System (MTMS) usually conducts relative measurements on the tunnel scanning data—that is, only the forward direction is expanded according to the mileage, and the actual geometric shape is not restored when the actual linear and geometric position of the tunnel are needed. In general, the point cloud data in a relative coordinate system will be linearly restored.
In the past, the linear restoration of tunnel point cloud data usually directly used the design data method, but there may have been design data inconsistent with the actual construction, or it was difficult to obtain design data due to the age and other reasons, and the data could only be used for display. There are also 3D conformal transformation methods that compare the relative target position obtained by the scanner with the total-station measurement coordinates. In the process of moving laser scanning to obtain the point cloud, the reflector target is pasted at a certain interval on the tunnel wall. At the same time, the total station is used to measure the position of the target center, and the seven-parameter conversion is carried out to obtain the tunnel point cloud data in the absolute coordinate system. This kind of method is not only difficult to implement, but also difficult to manage. Additionally, because of the characteristics of the algorithm, when the measurement distance is long, the tunnel point cloud will produce obvious deformation, and the measurement error will increase sharply. The result is obviously inconsistent with the actual state of the tunnel. We have tried to use the SLAM algorithm for linear restoration; the SLAM algorithm can better adapt to interiors and various multi-featured environments. However, the effect of the application in the repetitive structure environment of a tunnel is not acceptable.
The method we now put forward mainly seeks to process the point cloud data obtained from the measurement in the relative coordinate system, get the point cloud data results in the absolute coordinate system, and carry out three-dimensional display, modeling and digital management. This “3D linear restoration of a tunnel method” is a new name proposed by us, which refers to the restoration of the point cloud in the relative coordinate system to the absolute coordinate system. Similar commercial systems, such as the Leica Sitrack one mobile track scanning system, use the Leica P40 scanner and integrate IMU, GNSS and other positioning systems. Unlike GPS-IMU integrated navigation and other methods, our method is mainly based on the linear restoration of point cloud data in the relative coordinate system from the points on the measured track center line of the tunnel. Integrated navigation is more complex and expensive, but we try to obtain a linear restoration method without additional calculation and cost. In the monitoring of tunnel diameter convergence and staggered platform calculation, the point cloud data results are mainly used and are expanded according to the scanning ring and accurately located according to the mileage. Linear restoration of point cloud data in a relative coordinate system is mainly used for 3D display, modeling and digital management. In the intelligent railway project of a heavy haul railway in China, we use this method for measurement and modeling, which is used for subsequent digital management. At the same time, we compare the point cloud data collected by integrated navigation in this project, and also compare it with the point cloud data collected by airborne radar. This all meets the requirements.
Therefore, this study proposes a method to restore the linear of the point cloud data in a relative coordinate system based on the measured track center line of the tunnel, which combines the method of generating interpolation calculation translations from the measured position with the method of calculating rotation parameters from the simulated design data, and converts the section’s point cloud in the local coordinate system to the absolute coordinate system, so as to calculate the tunnel line. In this paper, based on the MTMS, the point cloud data in the relative coordinate system are restored linearly. According to the measured track center line, the translation parameters are calculated by cubic spline interpolation. The curvature of the track center line is calculated, and the rotation parameters are calculated by dividing different linear and pile positions. The point cloud data in the absolute coordinate system are obtained by linear restoration of the point cloud data in the relative coordinate system through the calculated translation parameters and rotation parameters. This can ensure that the geometry of the tunnel is in line with the actual situation and obtain the actual point cloud coordinate position with high accuracy. It thereby also ensures the accuracy and effectiveness of the tunnel’s section data. Compared with the previous methods, it can effectively avoid the obvious deformation of the tunnel and the sharp increase in the error.
3. Linear Restoration Method
In this paper, the method of linear restoration of the tunnel point cloud is mainly based on the point cloud data in the relative coordinate system generated by the MTMS. In the past, the linear restoration of tunnel point cloud data was usually directly based on the design data method. However, due to the long history, tunnel deformation and other problems, it may be difficult to obtain the design data from the actual construction. The results show that the restored tunnel linear is obviously inconsistent with the actual state. Therefore, this paper proposes a method to automatically calculate the position and angle of the tunnel section according to the measured track centerline interpolation and curvature calculation, and then restore the tunnel point cloud data in an absolute coordinate system.
In the experiment, the total station is used to measure the points on the track’s center line. In the survey, after the total station is set up, the point is led from the pile control network (CPIII) for surveying. The pile control network (CPIII) is the most basic control network in the railway survey [
24,
25]. For the three-dimensional control network arranged along the line, the plane control starts and closes at the basic plane control network (CPI) or the line control network (CPII); the elevation control starts and stops at the second-class leveling network arranged along the line. Generally, the survey is carried out after the completion of the offline engineering construction, which is the benchmark for track laying and operation and maintenance proposed by the Ministry of Railways of the People’s Republic of China. CPIII is the track control network, which mainly provides the control benchmark for track laying and operation and maintenance. The subgrade is also set with a point every 100 m or so on the electrified pole base on both sides of the lower and upper sides. The CPIII plane control survey adopts free station side angle intersection method, and elevation control network observation adopts the one-way precise leveling method.
Thus, in the point cloud in the relative coordinate system, the relationship between the track center and the relative position of the scanner can be regarded as a constant; that is, the relative track center of each mileage section can be obtained by calibrating the X and Z coordinates. According to the design data, we calculate the design of the track center line or directly use the measured track center line data to obtain the three-dimensional coordinates of each mileage section track-center point, so as to calculate the translation parameters [
26]. In the point cloud in the relative coordinate system, the values for three directions of each section are zero. Therefore, as long as the three attitude angles corresponding to each section in the design line are calculated, namely the plane azimuth angle, vertical deflection angle and lateral inclination angle, the rotation parameters can be calculated.
Because the complexity of the horizontal curve linear is higher than that of the vertical curve linear, there is an easement curve between the straight line and circular curve [
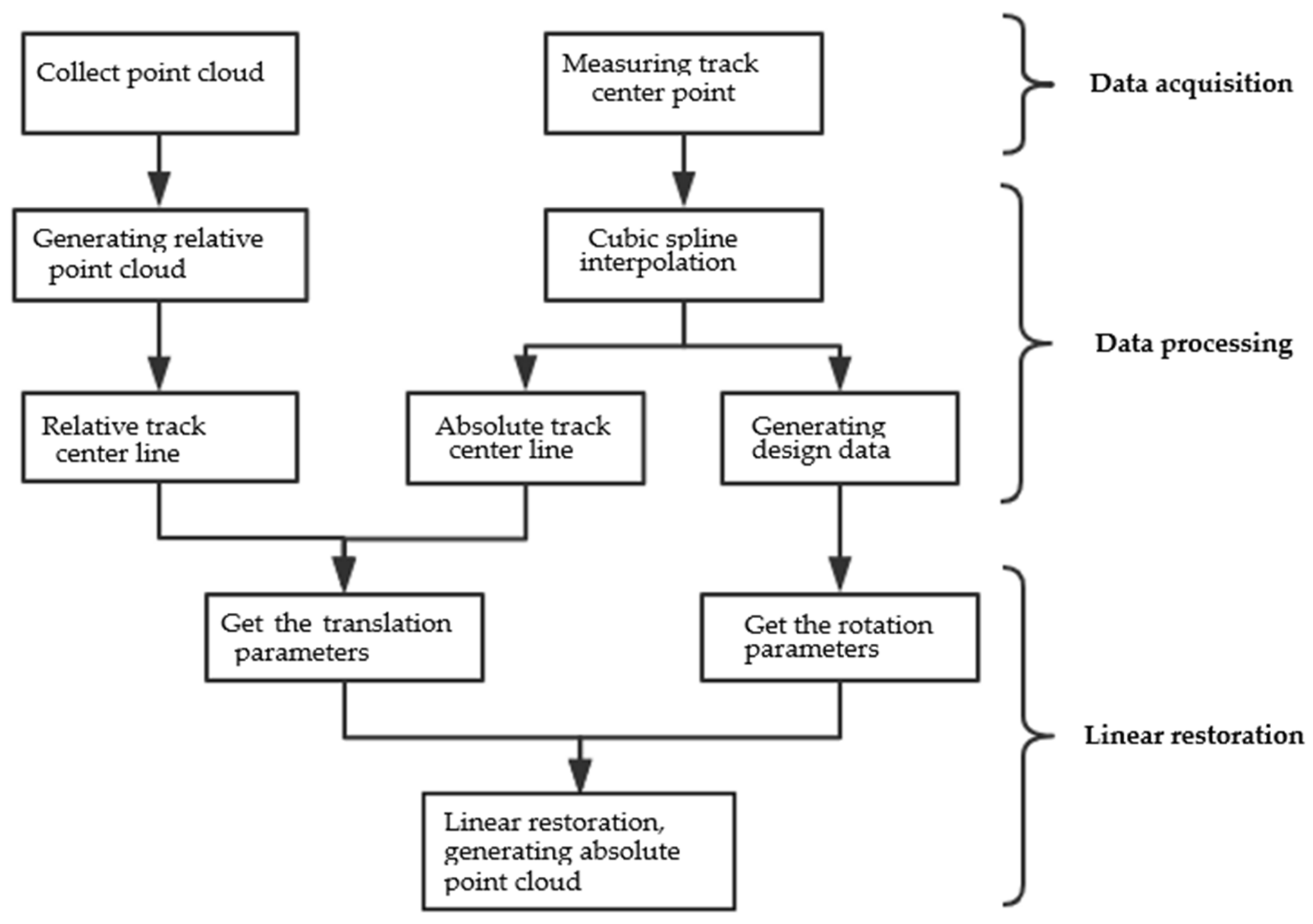
27]. In this paper, the linear fitting with the straight-line segment, easement-curve segment and circular-curve segment is mainly used for calculation and verification. Specifically, in this paper, the measured track center point of the spline curve is used for cubic spline interpolation to obtain the track center line, which is connected with the track center line in the relative coordinate system to calculate the translation parameters; the curvature of the track center line is calculated to determine each linear section and pile point; according to the linear and pile position, the horizontal deflection angle, lateral inclination angle and vertical deflection angle can be calculated. These angles constitute rotation parameters. According to the translation parameters and rotation parameters, the actual point cloud position can be restored. The data processing flow of the method of line restoration is shown in
Figure 2.
3.1. Translation Parameters
The coordinate calculation of the track center in the car body coordinate system can obtain the coordinate of the section center from the fitting calculation of the point cloud section, and then get the translation parameters from the scanner center to the track center by checking the car, and get the offset of the track center relative to the section center from the first two steps, so as to calculate the coordinate of the track center in the car body coordinate system. The relative track center line is determined according to mileage.
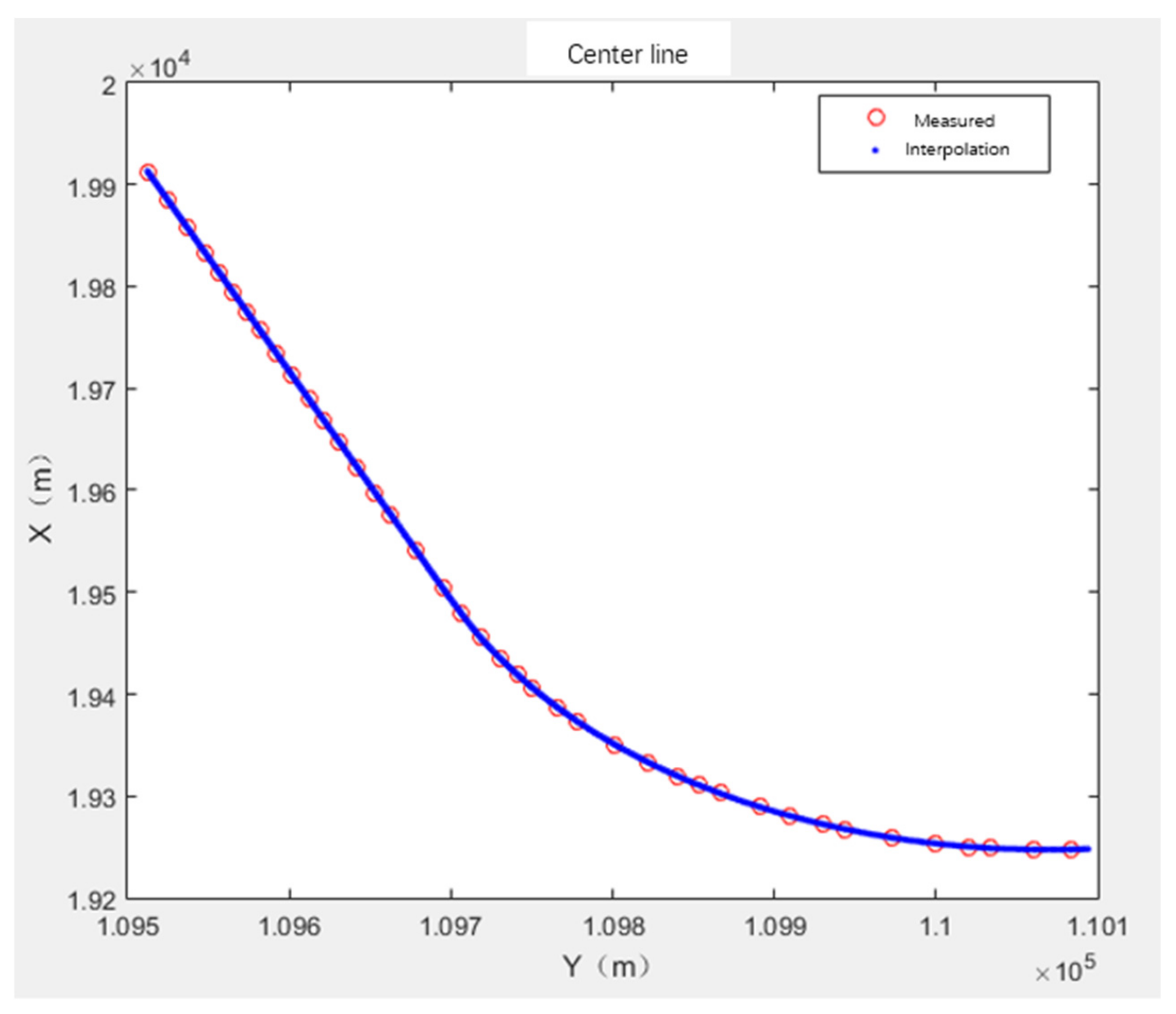
The measured track center line uses the total station to measure the track center point coordinates and corresponding mileage. The plane coordinates of the track center point at each mileage are obtained by spline interpolation of the measured track center X and Y coordinates, as shown in
Figure 3. The track center point elevation at each mileage is obtained by spline interpolation of the mileage M and elevation H coordinates, and the translation parameters can be obtained by comparing this with the relative center line generated by fitting.
3.2. Curvature Parameters
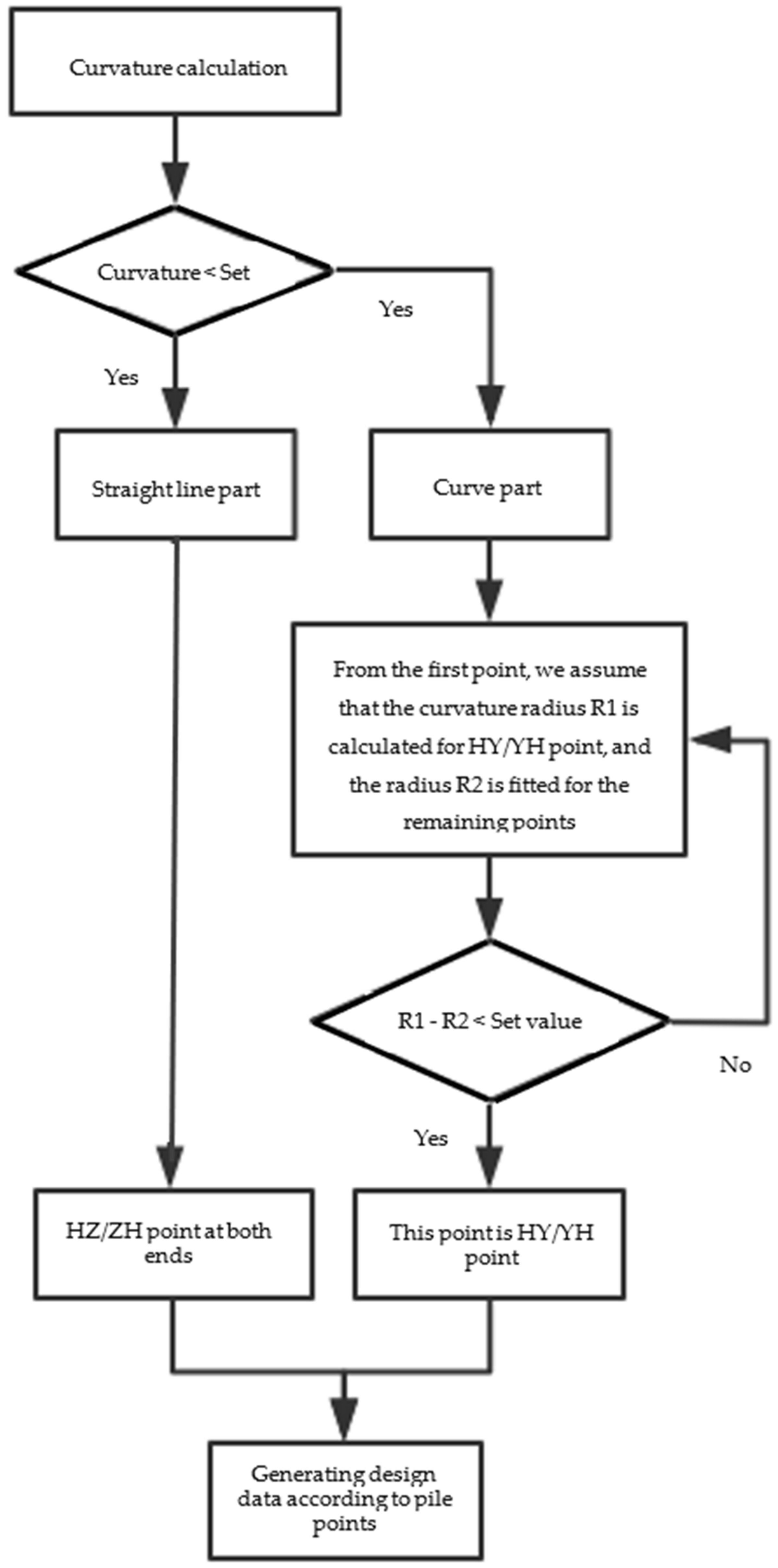
The curvatures of each track center line generated by interpolation are calculated to judge each linear section. Generally, the radius of the urban transit track curve will not exceed 5000 km—that is, the curvature is greater than 0.0002. According to the measured data, the part with curvature less than 0.0001 is regarded as the straight part, and the part with curvature more than 0.0001 is regarded as the curved part; for the curved part, according to the curvature and mileage, the fitting radius of the circular curve and the curvature radius of the HY point are calculated point by point. When the two are equal, they are the HY points. The processing flow is shown in
Figure 4.
For the center line of the track generated by interpolation, the curvature is calculated as follows:
The curvature graph and curvature radius are obtained as shown in
Figure 5 and
Figure 6. The curvature of the line
; the curvature of the circular curve is the reciprocal of the design radius R of the circle,
; the easement curve is maintained at
(
is a constant), where L is the mileage from the starting point of the easement curve; that is,
. So, curvature K is a function of mileage L, that is,
[
28].
For the calculation of the coordinates of HY points on the curve, according to the curvature K and mileage L, assuming that each mileage is taken as the HY points, the fitting radius
of the circular curve is calculated, and the parameter
of the gentle curve is calculated, as well as the curvature radius
of the HY points under this parameter. When
is equal to 0, it is an HY point. The calculation of HY points is shown in
Figure 7 and
Figure 8. When the fitting radius of the circular curve is equal to the curvature radius of HY points, it is the HY point.
3.3. Rotation Parameters
According to the location of the linear section, pile point and radius of the circular curve, the simulation design data can be generated, and the rotation parameters of each mileage section can be calculated.
3.3.1. Horizontal Deflection Angle
Because the track center points are on the track center line, the line segment between any two main points of the track center line can be regarded as a curve element. After obtaining the data of the simulated design of the horizontal curve, the azimuth
αP of each track center point P on the curve element can be calculated by the Gauss Legendre formula.
In Equation (9), KA and KB are the curvature of point A and point B, respectively; l is the mileage of point P; αA is the azimuth of point A; LS is the arc length of the element; αP is the azimuth of any point P on the curve element ab; c is the bending direction of the curve (when the curve bends to the right, c = +1; when the curve bends to the left, c = −1); and Ri and Vi are constants and are integral coefficients and integral nodes, respectively.
3.3.2. Lateral Inclination
Superelevation and lateral inclination refer to horizontal curve design data, which can also be divided into a straight line, easement curve and circular curve. The superelevation of the straight-line segment is 0, the superelevation of the circular curve segment is constant and the superelevation value is the same as that of the starting point of the curve segment, while the superelevation of the eased curve segment changes uniformly from the starting point to the end point. The lateral inclination is the ratio of superelevation-to-superelevation datum, as shown in
Figure 9.
The calculation Formula (10) of the superelevation is as follows:
where
V is the design speed;
R is the curvature radius of the horizontal curve.
In the actual calculation, according to the mileage data of the measured section, the section of the superelevation line corresponding to the track center of the measured section can be determined. The superelevation angle of each point on the curve can be calculated through the superelevation of the starting point and the ending point of each curve section, and the calculation method is different according to the curve type [
29]. For the straight section, the superelevation is always 0; the superelevation of the circular curve section is constant and is the same as the superelevation of the starting point of the section. If a section is located in a circular curve segment, its track inclination angle
α can be calculated according to the superelevation datum and the superelevation constant of the section
According to Formula (12), the track lateral inclination of a point on the easement curve section can be calculated:
In Formula (12), cd is the superelevation datum, generally 1500 mm, LS is the total length of the easement curve, and L1 is the mileage difference between the mileage of the track center point to be calculated and the starting point of the easement curve section, where is the tangent proportion constant of the track’s lateral inclination in the easement curve section.
3.3.3. Vertical Deflection Angle
The vertical deflection angle of the tunnel section can be calculated from the simulated vertically designed curve. If the section is in the straight section of the vertical curve, the vertical deflection angle is 0°. If the section is in the circular curve section of the vertical curve, its vertical deflection angle is the slope value in the line coordinate system. In the mileage elevation coordinate system, the curve element solution model is used to calculate
αM:
6. Conclusions
This method is based on the measured track center line of the tunnel, uses the correlation algorithm, generates interpolation according to the measured position to calculate the translations, and combines with the method of calculating the rotation parameters through the simulation of design data; then, the position and angle of the tunnel section are calculated automatically; finally, the cross-section point cloud in the local coordinate system is converted to the absolute coordinate system, and the true alignment of the tunnel is restored, and the tunnel point cloud data in the absolute coordinate system are obtained.
The point error of the proposed method can be controlled to within 0.1 m; the average deviation of the horizontal point is 55.1 mm, and the average deviation of the elevation direction is 27.4 mm.
In the past, we usually used the design data to restore the point cloud in the relative coordinate system linearly. This time, we propose a new method to restore the point cloud in the relative coordinate system linearly by using the measured track center line, which is different from the method of using the design data directly. We do not need the aid of integrated navigation and other auxiliary systems. We have not found any other similar method. This method can greatly reduce the cost of obtaining a point cloud in absolute coordinate system, and has great significance in 3D modeling, digital management and other applications. It can provide better data support for transit tunnel track 3D displays, 3D reconstruction [
38], completion survey, systematic hazard management [
39] and other follow-up tunnel analysis and management, and can also provide a good perspective for future research. At the same time, the track measurement data used in this method can be combined with the tunnel maintenance to obtain the measured data of the center line directly from the engineering department, so as to avoid increasing the measurement workload.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}