
UWB Radio-Based Motion Detection System for Assisted Living




Abstract
1. Introduction
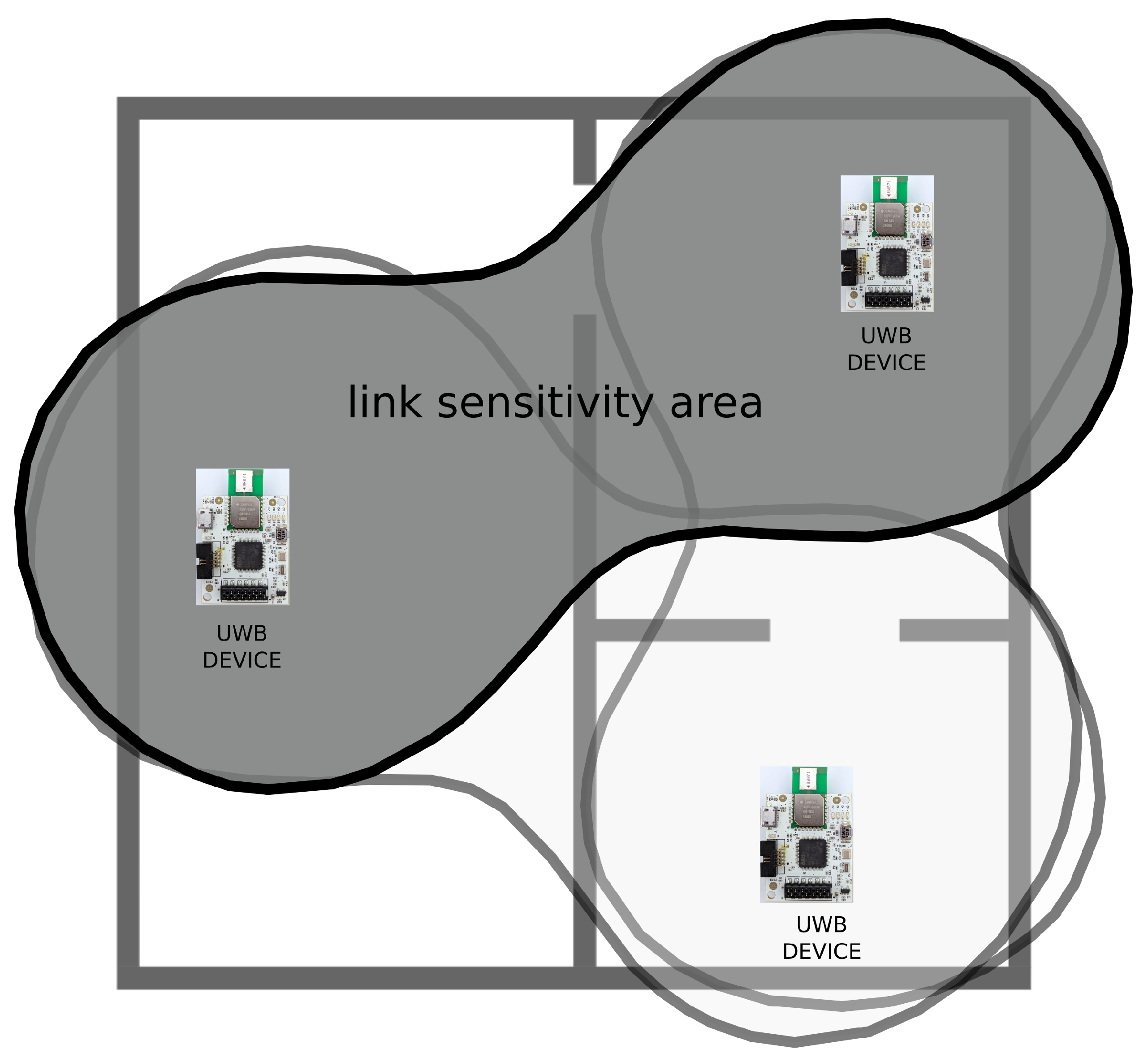
- A UWB radio system for motion detection based on a gateway device with signal processing capabilities and three UWB transceivers;
- A publicly accessible dataset for UWB motion detection including the code reproducing the work described in this paper; the dataset is created for motion detection exploration, development of motion detection algorithms and algorithm evaluation;
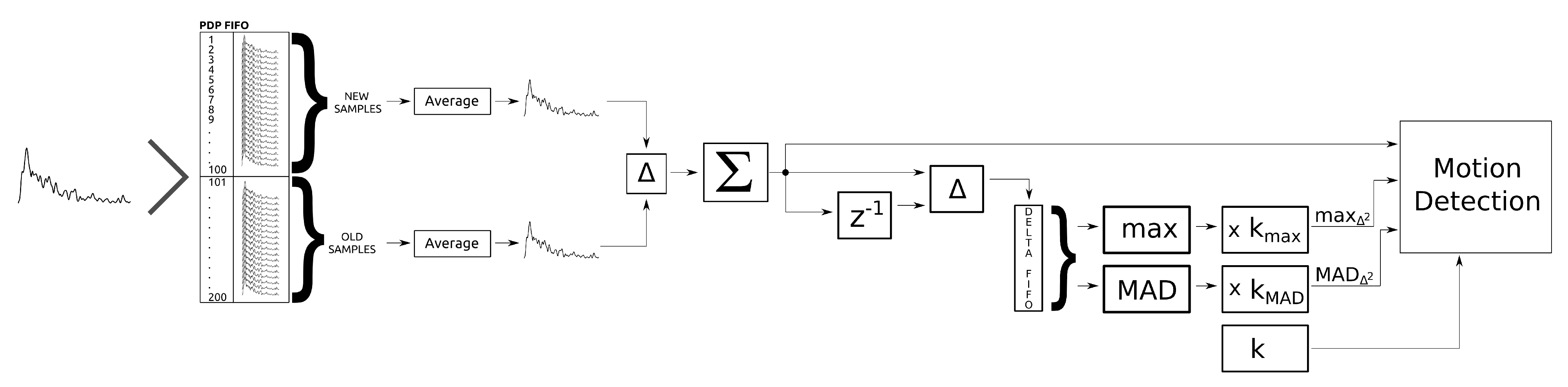
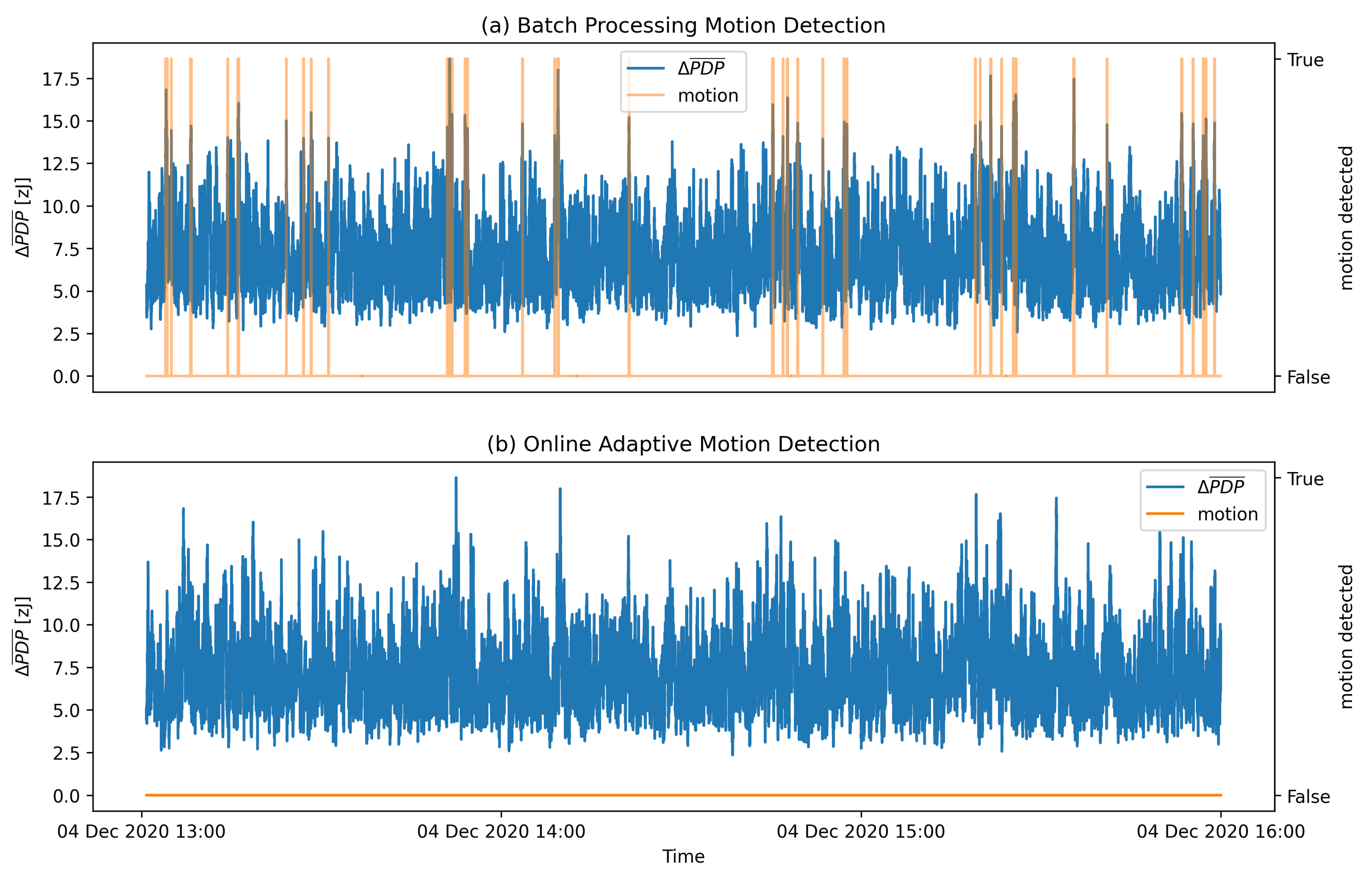
- An online adaptive motion detection (OAMD) algorithm, which improves the performance of static, offline, or batch motion detection approach by using the online calculated statistics on derivatives of power delay profile (PDP) differences to actively adapt the motion detection threshold in a short-term sliding window to the changing conditions in the operating environment.
2. Related Work
3. AL Motion Detection System
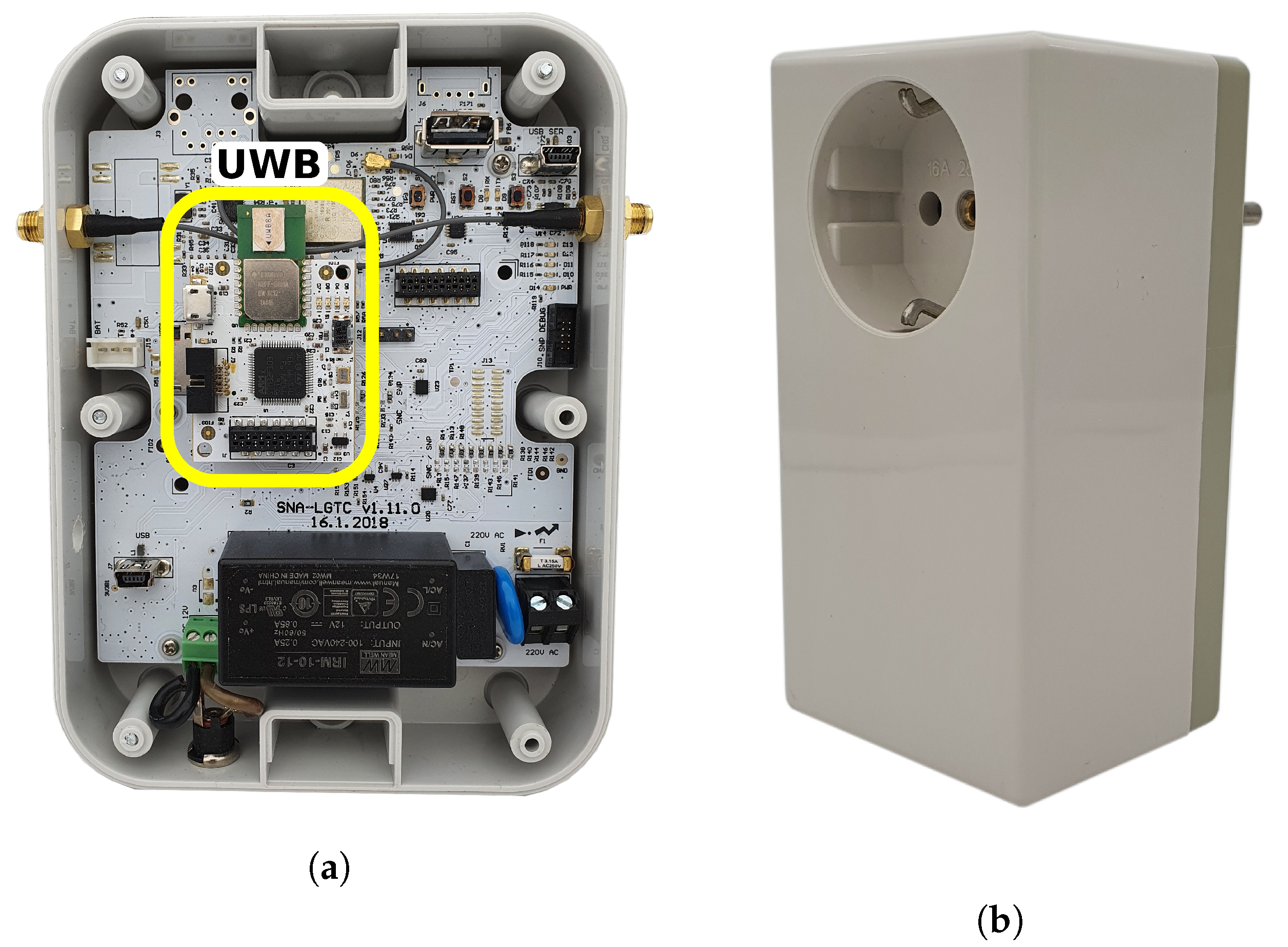
3.1. Hardware Components
3.2. Deployment Procedure and Dataset Generation
4. Detecting Changes in Radio Channel
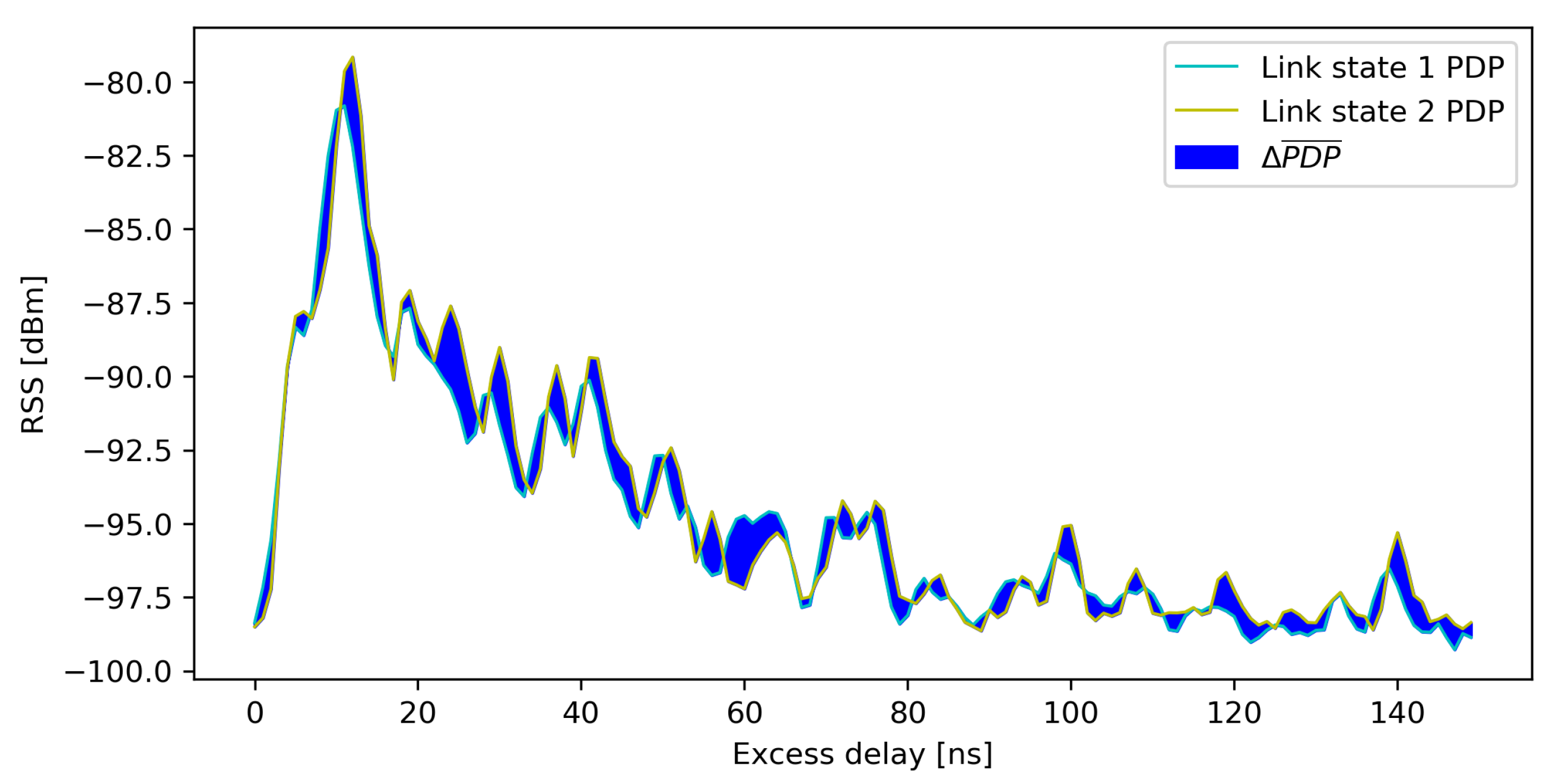
4.1. Power Delay Profile Moving Average
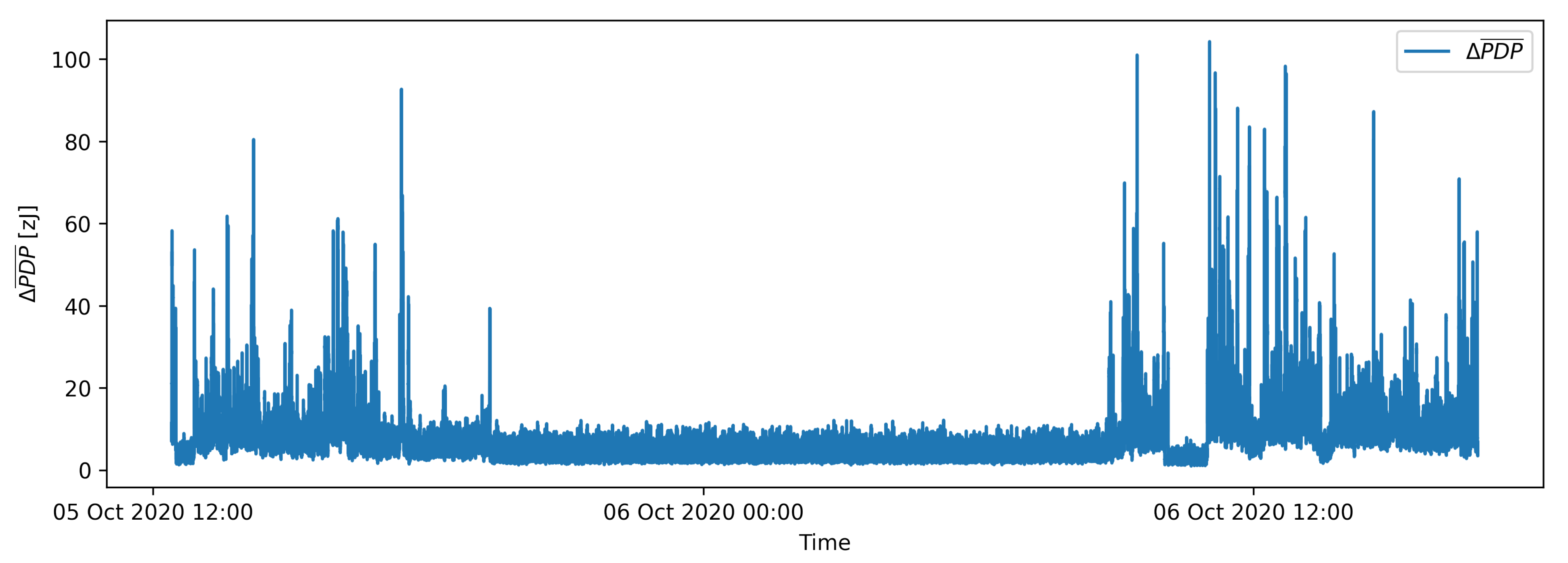
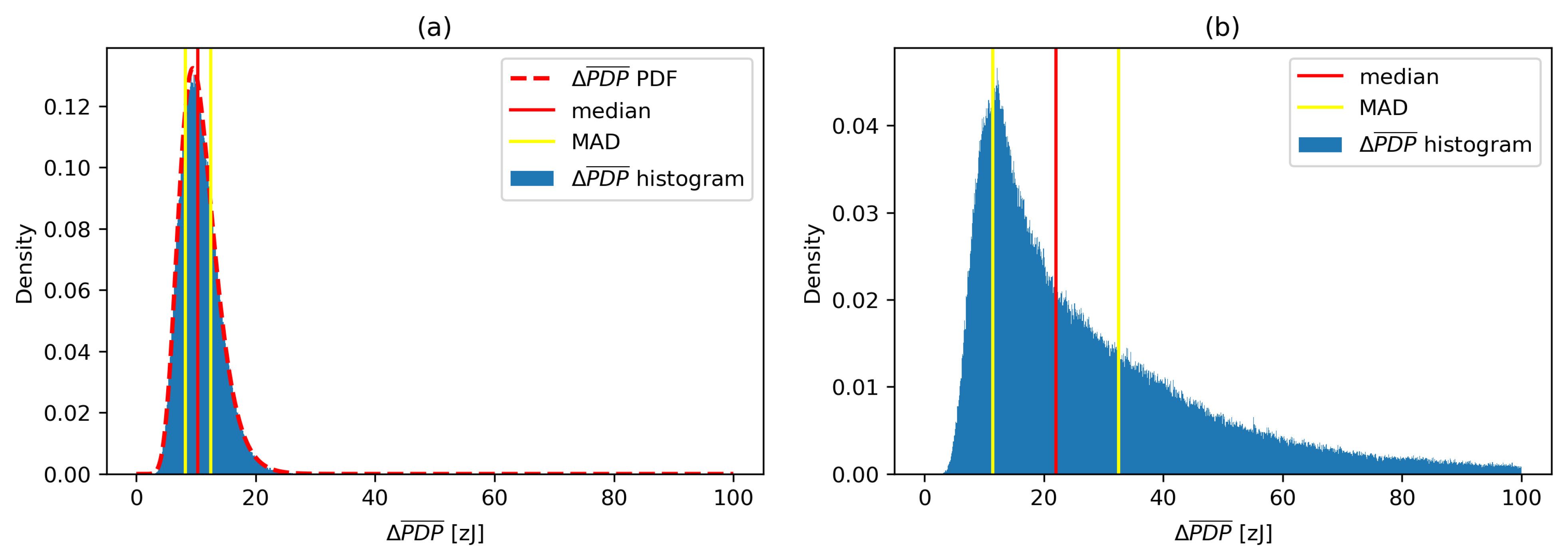
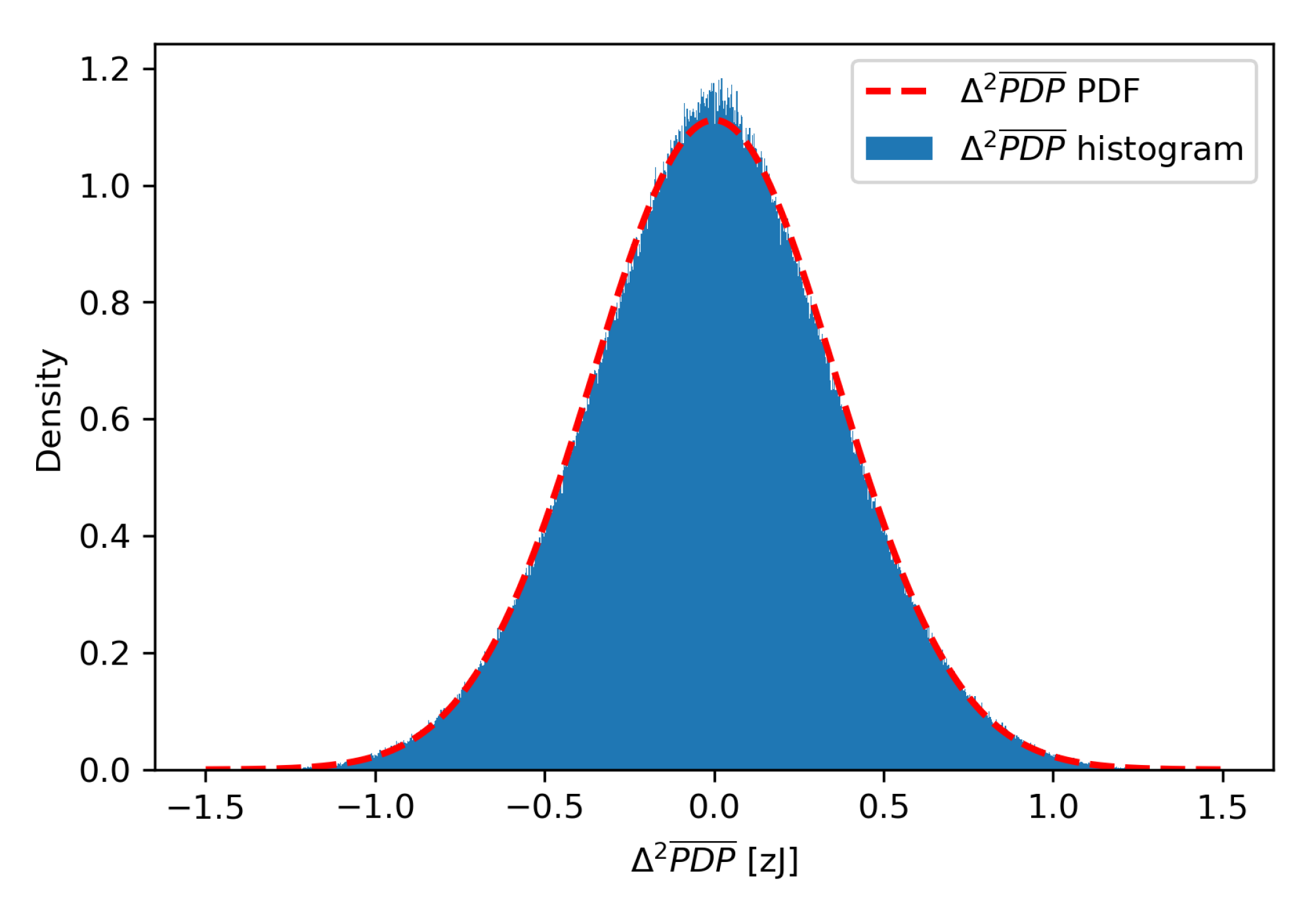
4.2. PDP Differences
5. Batch Processing Motion Detection
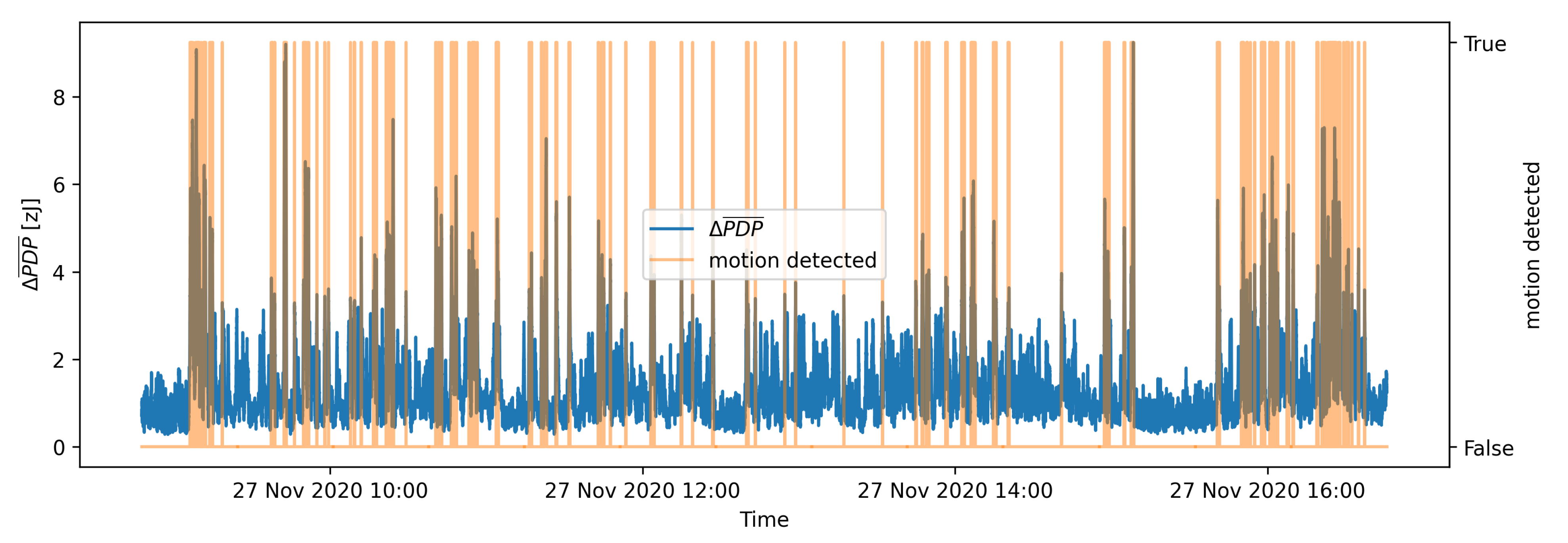
6. Online Adaptive Motion Detection Approach
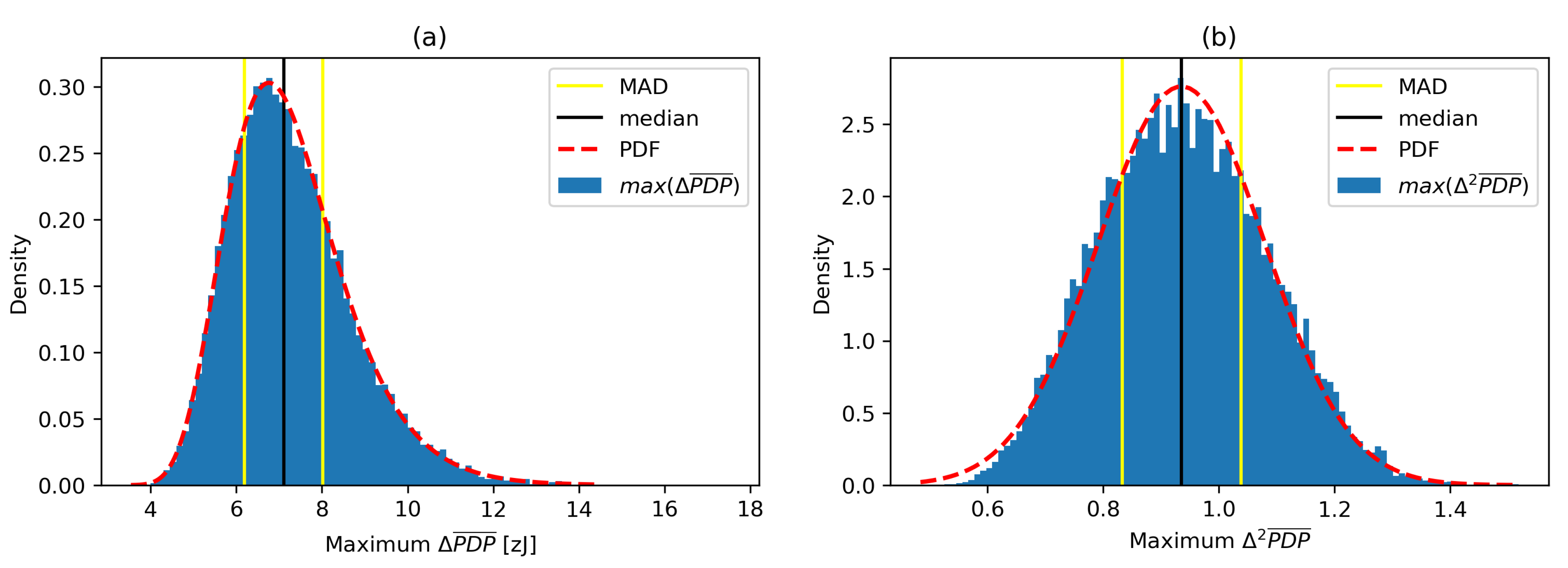
6.1. Adaptive Threshold Estimation
6.2. Online Adaptive Motion Detection Algorithm
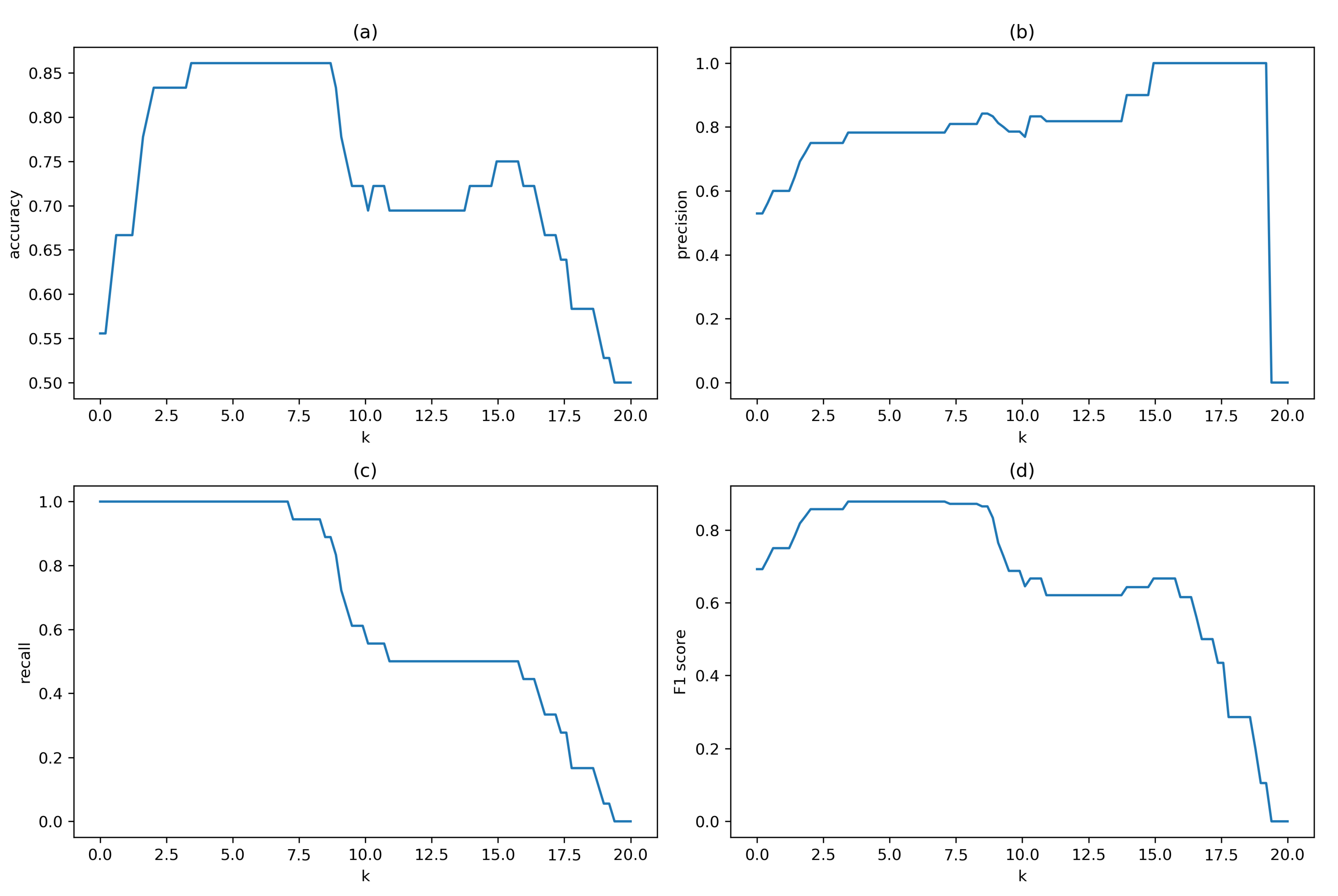
7. Performance Evaluation
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AL | assisted living |
| BLE | Bluetooth Low Energy |
| CAF | cross ambiguity function |
| CHDAR | CSI-based device-free HAR |
| CIR | channel impulse response |
| CLAS | classifier |
| CNN | convolutional neural network |
| CSI | channel state information |
| CTF | channel transfer function |
| DFL | device-free localization |
| DTN | Deep Transfer Network |
| EGW | edge gateway |
| FIFO | first-in-first-out |
| FM | frequency modulation |
| GPS | Global Positioning System |
| HAR | Human Activity Recognition |
| HMM | hidden Markov model |
| IEEE | Institute of Electrical and Electronics Engineers |
| IMU | inertial measurement unit |
| IR | infrared |
| KDE | kernel density estimation |
| LoS | line-of-sight |
| LSTM | long short-term memory |
| MCU | microcontroller unit |
| MDS | multidimensional scaling |
| ML | machine learning |
| MLP | multilayer perceptron |
| NLoS | non-line-of-sight |
| NRSS | narrowband received signal strength |
| OAMD | online adaptive motion detection |
| PCA | principal component analysis |
| probability density function | |
| PDP | power delay profile |
| PHY | physical layer |
| PIR | passive infrared |
| PRF | pulse repetition frequency |
| RF | radio frequency |
| RFID | radio-frequency identification |
| RNN | recurrent neural network |
| RSS | received signal strength |
| RSSI | received signal strength indicator |
| RTI | radio tomographic imaging |
| SBC | single-board computer |
| SDR | software-defined radio |
| SNR | signal-to-noise ratio |
| SRC | sparse representation classifier |
| SRTI | shadow-based radio tomographic imaging |
| SVM | support vector machine |
| TOA | time of arrival |
| TWR | two-way ranging |
| UART | universal asynchronous receiver-transmitter |
| UWB | ultra-wideband |
| VRTI | variance-based tomographic imaging |
| WSN | wireless sensor networks |
References
- Priyadarshini, R.; Mehra, R. Quantitative review of occupancy detection technologies. Int. J. Radio Freq. 2015, 1, 1–19. [Google Scholar]
- Youssef, M.; Mah, M.; Agrawala, A. Challenges: Device-free passive localization for wireless environments. In Proceedings of the 13th Annual ACM International Conference on Mobile Computing and Networking, Montreal, QC, Canada, 9–14 September2007; pp. 222–229. [Google Scholar]
- Žnidaršič, M.; Ženko, B.; Osojnik, A.; Bohanec, M.; Panov, P.; Burger, H.; Matjačić, Z.; Debeljak, M. Multi-criteria Modelling Approach for Ambient Assisted Coaching of Senior Adults. In Proceedings of the 11th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management-Volume 2: KEOD, INSTICC, Vienna, Austria, 17–19 September 2019; SciTePress: Setúbal, Portugal, 2019; pp. 87–93. [Google Scholar] [CrossRef]
- Mendoza-Silva, G.M.; Torres-Sospedra, J.; Huerta, J. A meta-review of indoor positioning systems. Sensors 2019, 19, 4507. [Google Scholar] [CrossRef]
- Hussain, Z.; Sheng, Q.Z.; Zhang, W.E. A review and categorization of techniques on device-free human activity recognition. J. Netw. Comput. Appl. 2020, 167, 102738. [Google Scholar] [CrossRef]
- Xiao, J.; Wu, K.; Yi, Y.; Wang, L.; Ni, L.M. Pilot: Passive device-free indoor localization using channel state information. In Proceedings of the 2013 IEEE 33rd International Conference on Distributed Computing Systems, Philadelphia, PA, USA, 8–11 July 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 236–245. [Google Scholar]
- Schäfer, J. Practical concerns of implementing machine learning algorithms for W-LAN location fingerprinting. In Proceedings of the 2014 6th International Congress on Ultra Modern Telecommunications and Control Systems and Workshops (ICUMT), St. Petersburg, Russia, 6–8 October 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 310–317. [Google Scholar]
- Aversente, F.; Klein, D.; Sultani, S.; Vronski, D.; Schäfer, J.; Alek-seev, S. Deploying Contextual Computing in a Campus Setting. In Proceedings of the INC, Frankfurt am Main, Germany, 19–21 July 2016; pp. 135–140. [Google Scholar]
- Zhang, Z.; Tian, Z.; Zhou, M.; Li, Z.; Wu, Z.; Jin, Y. WIPP: Wi-Fi compass for indoor passive positioning with decimeter accuracy. Appl. Sci. 2016, 6, 108. [Google Scholar] [CrossRef]
- Zhou, Z.; Yang, Z.; Wu, C.; Shangguan, L.; Liu, Y. Omnidirectional coverage for device-free passive human detection. IEEE Trans. Parallel Distrib. Syst. 2013, 25, 1819–1829. [Google Scholar] [CrossRef]
- Qian, K.; Wu, C.; Yang, Z.; Liu, Y.; Zhou, Z. PADS: Passive detection of moving targets with dynamic speed using PHY layer information. In Proceedings of the 2014 20th IEEE International Conference on Parallel and Distributed Systems (ICPADS), Hsinchu, Taiwan, 16–19 December 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–8. [Google Scholar]
- Xi, W.; Zhao, J.; Li, X.Y.; Zhao, K.; Tang, S.; Liu, X.; Jiang, Z. Electronic frog eye: Counting crowd using WiFi. In Proceedings of the IEEE INFOCOM 2014-IEEE Conference on Computer Communications, Toronto, ON, Canada, 27 April–2 May 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 361–369. [Google Scholar]
- Wang, Y.; Liu, J.; Chen, Y.; Gruteser, M.; Yang, J.; Liu, H. E-eyes: Device-free location-oriented activity identification using fine-grained wifi signatures. In Proceedings of the 20th Annual International Conference on Mobile Computing and Networking, Maui, HI, USA, 7–11 September 2014; pp. 617–628. [Google Scholar]
- Wang, W.; Liu, A.X.; Shahzad, M.; Ling, K.; Lu, S. Understanding and modeling of wifi signal based human activity recognition. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking, Paris, France, 7–11 September 2015; pp. 65–76. [Google Scholar]
- Wang, Y.; Jiang, X.; Cao, R.; Wang, X. Robust indoor human activity recognition using wireless signals. Sensors 2015, 15, 17195–17208. [Google Scholar] [CrossRef]
- Al-Qaness, M.A.A.; Li, F.; Ma, X.; Zhang, Y.; Liu, G. Device-free indoor activity recognition system. Appl. Sci. 2016, 6, 329. [Google Scholar] [CrossRef]
- Pu, Q.; Gupta, S.; Gollakota, S.; Patel, S. Whole-home gesture recognition using wireless signals. In Proceedings of the 19th Annual International Conference on Mobile Computing & Networking, Miami, FL, USA, 30 September–4 October 2013; pp. 27–38. [Google Scholar]
- Al-qaness, M.A.A.; Li, F. WiGeR: WiFi-based gesture recognition system. ISPRS Int. J. Geo-Inf. 2016, 5, 92. [Google Scholar] [CrossRef]
- He, W.; Wu, K.; Zou, Y.; Ming, Z. WiG: WiFi-based gesture recognition system. In Proceedings of the 2015 24th International Conference on Computer Communication and Networks (ICCCN), Las Vegas, NV, USA, 3–6 August 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–7. [Google Scholar]
- Cassarà, P.; Potortì, F.; Barsocchi, P.; Girolami, M. Choosing an RSS device-free localization algorithm for Ambient Assisted Living. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015; pp. 1–8. [Google Scholar] [CrossRef]
- Shukri, S.; Kamarudin, L.M.; Ndzi, D.L.; Zakaria, A.; Azemi, S.N.; Kamarudin, K.; Zakaria, S.M.M.S. RSSI-based Device Free Localization for Elderly Care Application. In Proceedings of the 2nd International Conference on Internet of Things, Big Data and Security-Volume 1: IoTBDS, INSTICC, Porto, Portugal, 24–26 April 2017; SciTePress: Setúbal, Portugal, 2017; pp. 125–135. [Google Scholar] [CrossRef]
- Borhani, A.; Pätzold, M.; Yang, K. Time-Frequency Characteristics of In-Home Radio Channels Influenced by Activities of the Home Occupant. Sensors 2019, 19, 3557. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, K.; Ni, L.M. Wifall: Device-free fall detection by wireless networks. IEEE Trans. Mob. Comput. 2016, 16, 581–594. [Google Scholar] [CrossRef]
- Tan, B.; Chen, Q.; Chetty, K.; Woodbridge, K.; Li, W.; Piechocki, R. Exploiting WiFi Channel State Information for Residential Healthcare Informatics. IEEE Commun. Mag. 2018, 56, 130–137. [Google Scholar] [CrossRef]
- Lv, J.; Yang, W.; Gong, L.; Man, D.; Du, X. Robust WLAN-Based Indoor Fine-Grained Intrusion Detection. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, W.; Liu, A.X.; Shahzad, M.; Ling, K.; Lu, S. Device-free human activity recognition using commercial WiFi devices. IEEE J. Sel. Areas Commun. 2017, 35, 1118–1131. [Google Scholar] [CrossRef]
- Zhu, D.; Pang, N.; Li, G.; Liu, S. NotiFi: Non-Invasive Abnormal Activity Detection Using Fine-grained WiFi Signals. In Proceedings of the 2017 International Joint Conference on Neural Networks, Anchorage, AK, USA, 14–19 May 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Jiang, W.; Miao, C.; Ma, F.; Yao, S.; Wang, Y.; Yuan, Y.; Xue, H.; Song, C.; Ma, X.; Koutsonikolas, D.; et al. Towards environment independent device free human activity recognition. In Proceedings of the 24th Annual International Conference on Mobile Computing and Networking, New Delhi, India, 29 October–2 November 2018; pp. 289–304. [Google Scholar]
- Al-qaness, M.A. Device-free human micro-activity recognition method using WiFi signals. Geo-Spat. Inf. Sci. 2019, 22, 128–137. [Google Scholar] [CrossRef]
- Tan, S.; Zhang, L.; Wang, Z.; Yang, J. MultiTrack: Multi-user tracking and activity recognition using commodity WiFi. In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, Glasgow, UK, 4–9 May 2019; pp. 1–12. [Google Scholar]
- Wang, F.; Feng, J.; Zhao, Y.; Zhang, X.; Zhang, S.; Han, J. Joint activity recognition and indoor localization with WiFi fingerprints. IEEE Access 2019, 7, 80058–80068. [Google Scholar] [CrossRef]
- Chen, Q.; Liu, Y.; Tan, B.; Woodbridge, K.; Chetty, K. Respiration and Activity Detection Based on Passive Radio Sensing in Home Environments. IEEE Access 2020, 8, 12426–12437. [Google Scholar] [CrossRef]
- Damodaran, N.; Haruni, E.; Kokhkharova, M.; Schäfer, J. Device free human activity and fall recognition using WiFi channel state information (CSI). CCF Trans. Pervasive Comput. Interact. 2020, 2, 1–17. [Google Scholar] [CrossRef]
- Taylor, W.; Shah, S.A.; Dashtipour, K.; Zahid, A.; Abbasi, Q.H.; Imran, M.A. An Intelligent Non-Invasive Real-Time Human Activity Recognition System for Next-Generation Healthcare. Sensors 2020, 20, 2653. [Google Scholar] [CrossRef] [PubMed]
- Yuan, H.; Yang, X.; He, A.; Li, Z.; Zhang, Z.; Tian, Z. Features extraction and analysis for device-free human activity recognition based on channel statement information in b5G wireless communications. EURASIP J. Wirel. Commun. Netw. 2020, 2020, 36. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra wideband indoor positioning technologies: Analysis and recent advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef] [PubMed]
- Mazhar, F.; Khan, M.G.; Sällberg, B. Precise indoor positioning using UWB: A review of methods, algorithms and implementations. Wirel. Pers. Commun. 2017, 97, 4467–4491. [Google Scholar] [CrossRef]
- Shi, G.; Ming, Y. Survey of indoor positioning systems based on ultra-wideband (UWB) technology. In Wireless Communications, Networking and Applications; Springer: New Delhi, India, 2016; pp. 1269–1278. [Google Scholar]
- Jovanoska, S.; Zetik, R.; Thoma, R.; Govaers, F.; Wilds, K.; Koch, W. Device-free indoor localization using a distributed network of autonomous UWB sensor nodes. In Proceedings of the 2013 Workshop on Sensor Data Fusion: Trends, Solutions, Applications (SDF), Bonn, Germany, 9–11 October 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Daim, T.J.; Lee, R.M.A. Indoor Environment Device-Free Wireless Positioning using IR-UWB Radar. In Proceedings of the 2018 IEEE International Conference on Artificial Intelligence in Engineering and Technology (IICAIET), Kota Kinabalu, Malaysia, 8–9 November 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Daim, T.J.; Lee, R.M.A. A weighted least squares consideration for IR-UWB radar based device-free object positioning estimation for indoor environment. Indones. J. Electr. Eng. Comput. Sci. (IJEECS) 2019, 15, 894–901. [Google Scholar] [CrossRef]
- Yang, X.; Yin, W.; Li, L.; Zhang, L. Dense people counting using IR-UWB radar with a hybrid feature extraction method. IEEE Geosci. Remote Sens. Lett. 2018, 16, 30–34. [Google Scholar] [CrossRef]
- Choi, J.H.; Kim, J.E.; Kim, K.T. People Counting Using IR-UWB Radar Sensor in a Wide Area. IEEE Internet Things J. 2020, 8, 5806–5821. [Google Scholar] [CrossRef]
- Rana, S.P.; Dey, M.; Ghavami, M.; Dudley, S. Signature inspired home environments monitoring system using IR-UWB technology. Sensors 2019, 19, 385. [Google Scholar] [CrossRef]
- Klavestad, S.; Assres, G.; Fagernes, S.; Grønli, T.M. Monitoring Activities of Daily Living Using UWB Radar Technology: A Contactless Approach. IoT 2020, 1, 320–336. [Google Scholar] [CrossRef]
- Yang, Y.; Cao, J.; Liu, X.; Liu, X. Multi-breath: Separate respiration monitoring for multiple persons with UWB radar. In Proceedings of the 2019 IEEE 43rd Annual Computer Software and Applications Conference (COMPSAC), Milwaukee, WI, USA, 15–19 July 2019; IEEE: Piscataway, NJ, USA, 2019; Volume 1, pp. 840–849. [Google Scholar]
- Han, T.; Kang, W.; Choi, G. IR-UWB Sensor Based Fall Detection Method Using CNN Algorithm. Sensors 2020, 20, 5948. [Google Scholar] [CrossRef] [PubMed]
- Kilic, Y.; Wymeersch, H.; Meijerink, A.; Bentum, M.J.; Scanlon, W.G. An experimental study of UWB device-free person detection and ranging. In Proceedings of the 2013 IEEE International Conference on Ultra-Wideband (ICUWB), Sydney, NSW, Australia, 15–18 September 2013; pp. 43–48. [Google Scholar] [CrossRef]
- Kilic, Y.; Wymeersch, H.; Meijerink, A.; Bentum, M.J.; Scanlon, W.G. Device-Free Person Detection and Ranging in UWB Networks. IEEE J. Sel. Top. Signal Process. 2014, 8, 43–54. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, H.; Xu, S.; Gao, F.; Bu, X.; An, J. Towards robust and efficient device-free localization using UWB sensor network. Pervasive Mob. Comput. 2017, 41, 451–469. [Google Scholar] [CrossRef]
- Li, B.; Hao, Z.; Dang, X. An indoor location algorithm based on Kalman filter fusion of ultra-wide band and inertial measurement unit. AIP Adv. 2019, 9, 085210. [Google Scholar] [CrossRef]
- Sharma, S.; Mohammadmoradi, H.; Heydariaan, M.; Gnawali, O. Device-Free Activity Recognition Using Ultra-Wideband Radios. In Proceedings of the 2019 International Conference on Computing, Networking and Communications (ICNC), Honolulu, HI, USA, 18–21 February 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1029–1033. [Google Scholar]
- Cimdins, M.; Schmidt, S.O.; Hellbrück, H. MAMPI-UWB—Multipath-Assisted Device-Free Localization with Magnitude and Phase Information with UWB Transceivers. Sensors 2020, 20, 7090. [Google Scholar] [CrossRef]
- Kolakowski, J.; Djaja-Josko, V.; Kolakowski, M.; Broczek, K. UWB/BLE Tracking System for Elderly People Monitoring. Sensors 2020, 20, 1574. [Google Scholar] [CrossRef] [PubMed]
- Bregar, K.; Hrovat, A.; Mohorčič, M.; Javornik, T. Self-Calibrated UWB based device-free indoor localization and activity detection approach. In Proceedings of the 2020 European Conference on Networks and Communications (EuCNC), Dubrovnik, Croatia, 15–18 June 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 176–181. [Google Scholar]
- Paolini, E.; Giorgetti, A.; Chiani, M.; Minutolo, R.; Montanari, M. Localization Capability of Cooperative Anti-Intruder Radar Systems. EURASIP J. Adv. Signal Process. 2008, 2008, 726854. [Google Scholar] [CrossRef]
- Decawave. DW1000 Datasheet; v2.22; Decawave: Dublin, Ireland, 2017. [Google Scholar]
- Bregar, K.; Hrovat, A.; Mohorčič, M. UWB Motion Detection Data Set; Zenodo: Geneva, Switzerland, 2021. [Google Scholar] [CrossRef]
- Savazzi, S.; Sigg, S.; Nicoli, M.; Rampa, V.; Kianoush, S.; Spagnolini, U. Device-Free Radio Vision for Assisted Living: Leveraging wireless channel quality information for human sensing. IEEE Signal Process. Mag. 2016, 33, 45–58. [Google Scholar] [CrossRef]
- Decawave. DW1000 User Manual; v2.18; Decawave: Dublin, Ireland, 2017. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Precision | Recall | F1 Score | Support |
|---|---|---|---|---|
| Activity | 0.78 | 1.0 | 0.88 | 18 |
| Static | 1.0 | 0.72 | 0.84 | 18 |
| Accuracy: | 0.86 |
| Class | Precision | Recall | F1 Score | Support |
|---|---|---|---|---|
| Activity | 1.0 | 1.0 | 1.0 | 18 |
| Static | 1.0 | 1.0 | 1.0 | 18 |
| Accuracy: |
| Class | Precision | Recall | F1 Score | Support |
|---|---|---|---|---|
| Activity | 0.95 | 1.0 | 0.98 | 21 |
| Static | 1.0 | 0.95 | 0.98 | 21 |
| Accuracy: |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bregar, K.; Hrovat, A.; Mohorčič, M. UWB Radio-Based Motion Detection System for Assisted Living. Sensors 2021, 21, 3631. https://doi.org/10.3390/s21113631
Bregar K, Hrovat A, Mohorčič M. UWB Radio-Based Motion Detection System for Assisted Living. Sensors. 2021; 21(11):3631. https://doi.org/10.3390/s21113631
Chicago/Turabian StyleBregar, Klemen, Andrej Hrovat, and Mihael Mohorčič. 2021. "UWB Radio-Based Motion Detection System for Assisted Living" Sensors 21, no. 11: 3631. https://doi.org/10.3390/s21113631
APA StyleBregar, K., Hrovat, A., & Mohorčič, M. (2021). UWB Radio-Based Motion Detection System for Assisted Living. Sensors, 21(11), 3631. https://doi.org/10.3390/s21113631