
TANVEER: Tri-Angular Nearest Vector-Based Energy Efficient Routing for IoT-Enabled Acoustic Sensor and Actor Networks (I-ASANs)

 , ,
, , 
 , ,
, ,
Abstract
1. Introduction
2. Related Work
3. Problem Explanation
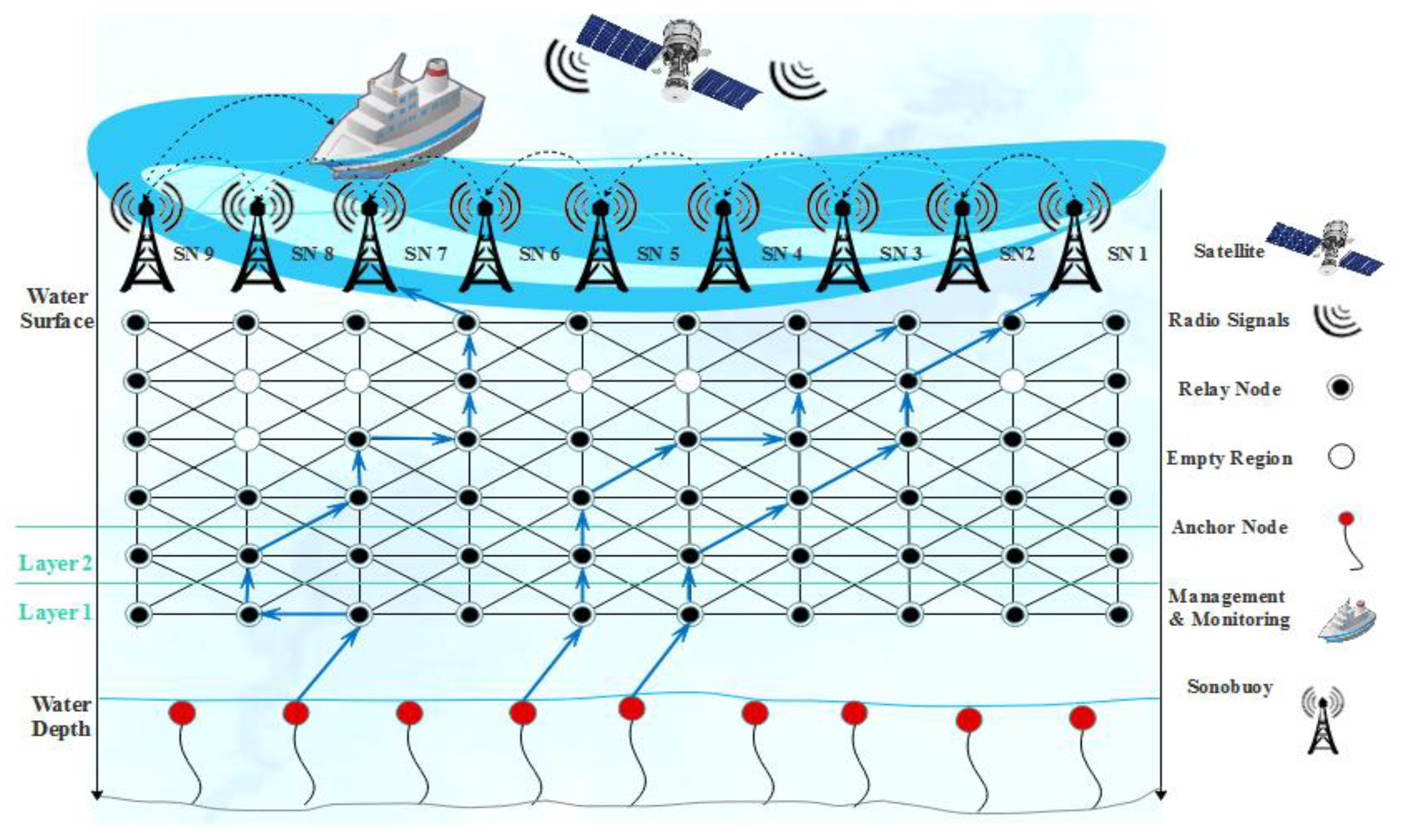
4. Proposed Model
5. The Tri-Angular Nearest Vector-Based Energy Efficient Routing (TANVEER)
5.1. Empty Regions Selection
5.2. Energy Efficient Nearest Vector Selection
6. Layer-Based Adjustment (LBA)-TANVEER
| Algorithm 1: Layer-Based Adjustment of Nodes. |
| 1. Procedure ASSIGNING LAYERS (Source, Sonobuoys (Sn)) 2. Total Layers (TL) = 9 3. IF HP: Hello Packet notification having seq Layer-ID 4. If Own-Layer-ID = 00 5. For n = 1 6. if n 7. 8. HP. Add (seq Layer-ID (N ID (x), (y), (z))) 9. 10. Assigning Layer-ID 11. end if 12. End For 13. IF (Own-Layer-ID ≤ n) 14. Discard HP 15. Else 16. Own-Layer-ID = n 17. n + + 18. Broadcast HP further 19. End IF 20. End IF 21. End If 22. End for 23. No further broadcast for this Sink-HP 24. End Procedure |
7. Data Packet Delivery (DPD)-TANVEER
| Algorithm 2: Angle Based-Data Packet delivery. |
| 1. Procedure ACQUIRE ANGLE FOR NEXT NODE (Sourceni, Sn (PACK) 2. For 3. Tfn = D(ni, l1) ∗ D(nj, l2) − P (Er) then 4. θ = A (x, y, z) 5. Adjust angle for corresponding nodes ni → nj 6. End For 7. n 8. j 9. While θ = 90 ± 3K do 10. 11. If Ni and D (Sn) = (N (ln-l1) then 12. PCHG = 13. For Ni 14. Nj 15. End While 16. End For 17. Else 18. Modify θ = A (x, y, z) CHG 0 < θ < π 19. End if 20. For Er do 21. for Re (Ni then 22. Compute distance for nearest neighbor vector node then 23. if Nv: Tfn = D(ni, l1) ∗ D(nj, l2) − P (Er) do 24. Dissemination of data packet delivery until Er PCHG 25. end if 26. end for 27. End For 28. End if 29. End Procedure |
8. Binary Inter Nodes (BIN)-TANVEER
| Algorithm 3: Empty Regions Recovery Using Binary Inter-Nodes. |
| 1. Procedure FORWARD THE DATA PACKETS (θ) (Source, Sonobuoys) 2. IF Empty region or node = 0 then 3. Compute the angle with A (x, y, z) 4. Select the appropriate nodes 5. Forward the data packets () 6. ELSE 7. For Nv: Tfn = D(ni, l1) ∗ D(nj, l2) P (Er) do 8. Modify θ = A (x, y, z) CHG 0 < θ < π 9. If 10. 11. Re-schedule angle and forwards the data packets () 12. Proposed mechanism () 13. END IF 14. End For 15. End If 16. End Procedure |
9. Achievable Regions
9.1. Minimization of Energy Consumed
9.2. Maximum of Network Throughput

10. Simulation Results and Discussion
10.1. Performance Control Parameters
10.2. Fraction of Empty Regions

10.3. Packet Delivery Ratio
10.4. Energy Consumption
10.5. Throughput
10.6. Influence of Coverage Area
11. Comparative Performance Trade-Offs
12. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gkikopouli, A.; Nikolakopoulos, G.; Manesis, S. A survey on underwater wireless sensor networks and applications. In Proceedings of the 2012 20th Mediterranean Conference on Control & Automation (MED), Barcelona, Spain, 3–6 July 2012; pp. 1147–1154. [Google Scholar]
- Davis, A.; Chang, H. Underwater wireless sensor networks. In Proceedings of the 2012 Oceans, Hampton Roads, VA, USA, 14–19 October 2012; pp. 1–5. [Google Scholar]
- Xu, Y.; Liu, F. Application of wireless sensor network in water quality monitoring. In Proceedings of the 2017 IEEE International Conference on Computational Science and Engineering (CSE) and IEEE International Conference on Embedded and Ubiquitous Computing (EUC), Guangzhou, China, 21–24 July 2017; Volume 2, pp. 368–371. [Google Scholar]
- Zhu, Y.J.; Xu, P.F. Development and Applications of Underwater Acoustic Communication Networks. Commun. Technol. 2012, 6. Available online: https://en.cnki.com.cn/Article_en/CJFDTotal-TXJS201206013.htm (accessed on 17 May 2021).
- Jing, H. Coverage Holes Recovery Algorithm Based On Nodes Balance Distance Of Underwater Wireless Sensor Network. Int. J. Smart Sens. Intell. Syst. 2014, 7, 1890–1907. [Google Scholar] [CrossRef]
- Ali, T.; Jung, L.T.; Ameer, S. Flooding control by using angle-based cone for UWSNs. In Proceedings of the 2012 International Symposium on Telecommunication Technologies, Kuala Lumpur, Malaysia, 26–28 November 2012; pp. 112–117. [Google Scholar]
- Ali, T.; Jung, L.T.; Faye, I. Delay Efficient Layer by Layer Angle Based Flooding Protocol (L2-ABF) for Underwater Wireless Sensor Networks. Available online: http://www.iiis.org/CDs2012/CD2012ADII/ICTA_2012/PapersPdf/CT004EM.pdf (accessed on 17 May 2021).
- Byun, J.; Cho, Y.H.; Im, T.; Ko, H.L.; Shin, K.; Kim, J.; Jo, O. Iterative Learning for Reliable Link Adaptation in the Internet of Underwater Things. IEEE Access 2021, 9, 30408–30416. [Google Scholar] [CrossRef]
- Coutinho, R.W.; Boukerche, A.; Vieira, L.F.; Loureiro, A.A. GEDAR: Geographic and opportunistic routing protocol with depth adjustment for mobile underwater sensor networks. In Proceedings of the 2014 IEEE International Conference on communications (ICC), Sydney, NSW, Australia, 10–14 June 2014; pp. 251–256. [Google Scholar]
- Hwang, D.; Kim, D. DFR: Directional flooding-based routing protocol for underwater sensor networks. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–7. [Google Scholar]
- Coutinho, R.W.; Vieira, L.F.; Loureiro, A.A. DCR: Depth-Controlled routing protocol for underwater sensor networks. In Proceedings of the 2013 IEEE Symposium on Computers and Communications (ISCC), Split, Croatia, 7–10 July 2013; pp. 453–458. [Google Scholar]
- Noh, Y.; Lee, U.; Wang, P.; Choi, B.S.C.; Gerla, M. VAPR: Void-aware pressure routing for underwater sensor networks. IEEE Trans. Mob. Comput. 2012, 12, 895–908. [Google Scholar] [CrossRef]
- Zhou, Z.; Yao, B.; Xing, R.; Shu, L.; Bu, S. E-CARP: An energy efficient routing protocol for UWSNs in the internet of underwater things. IEEE Sens. J. 2015, 16, 4072–4082. [Google Scholar] [CrossRef]
- Yu, H.; Yao, N.; Wang, T.; Li, G.; Gao, Z.; Tan, G. WDFAD-DBR: Weighting depth and forwarding area division DBR routing protocol for UASNs. Ad Hoc Netw. 2016, 37, 256–282. [Google Scholar] [CrossRef]
- Kamaruddin, A.; Ngadi, M.A.; Harun, H. An energy efficient void avoidance opportunistic routing protocol for underwater sensor. Telkomnika 2019, 17, 1948–1956. [Google Scholar] [CrossRef]
- Draz, U.; Ali, T.; Yasin, S. Cloud Based Watchman Inlets for Flood Recovery System Using Wireless Sensor and Actor Networks. In Proceedings of the 2018 IEEE 21st International Multi-Topic Conference (INMIC), Karachi, Pakistan, 1–2 November 2018; pp. 1–6. [Google Scholar]
- Javaid, N. NADEEM: Neighbor-node Approaching Distinct Energy Efficient Mates for reliable dat a delivery in IoT enabled underwater WSNs. Trans. Emerg. Telecommun. Technol. ETT 2019. [Google Scholar] [CrossRef]
- Yan, H.; Shi, Z.J.; Cui, J.H. DBR: Depth-based routing for underwater sensor networks. In Proceedings of the International Conference on Research in Networking, Singapore, 5–9 May 2008; pp. 72–86. [Google Scholar]
- Rahman, M.A.; Lee, Y.; Koo, I. EECOR: An energy-efficient cooperative opportunistic routing protocol for Underwater acoustic sensor networks. IEEE Access 2017, 5, 14119–14132. [Google Scholar] [CrossRef]
- Huang, C.J.; Wang, Y.W.; Liao, H.H.; Lin, C.F.; Hu, K.W.; Chang, T.Y. A power-efficient routing protocol for underwater wireless sensor networks. Appl. Soft Comput. 2011, 11, 2348–2355. [Google Scholar] [CrossRef]
- Kheirabadi, M.T.; Mohamad, M.M. Greedy routing in underwater acoustic sensor networks: A survey. Int. J. Distrib. Sens. Netw. 2013, 9, 701834. [Google Scholar] [CrossRef]
- Barbeau, M.; Blouin, S.; Cervera, G.; Garcia-Alfaro, J.; Kranakis, E. Location-free link state routing for underwater acoustic sensor networks. In Proceedings of the 2015 IEEE 28th Canadian Conference on Electrical and Computer Engineering (CCECE), Halifax, NS, Canada, 3–6 May 2015; pp. 1544–1549. [Google Scholar]
- Khan, A.; Ali, I.; Rahman, A.U.; Imran, M.; Mahmood, H. Co-EEORS: Cooperative energy efficient optimal relay selection protocol for underwater wireless sensor networks. IEEE Access 2018, 6, 28777–28789. [Google Scholar] [CrossRef]
- Wang, J.; Shi, W.; Xu, L.; Zhou, L.; Niu, Q. Design of optical-acoustic hybrid underwater wireless sensor network. J. Netw. Comput. Appl. 2017, 92, 59–67. [Google Scholar] [CrossRef]
- Park, K.H.; Imran, M.A.; Casari, P.; Kulhandjian, H.; Chen, H.; Abdi, A.; Dalgleish, F. IEEE Access Special Section Editorial: Underwater Wireless Communications and Networking. IEEE Access 2019, 7, 52288–52294. [Google Scholar] [CrossRef]
- Jin, Z.; Ji, Z.; Su, Y. An Evidence Theory Based Opportunistic Routing Protocol for Underwater Acoustic Sensor Networks. IEEE Access 2018, 6, 71038–71047. [Google Scholar] [CrossRef]
- Karim, O.A.; Javaid, N.; Sher, A.; Wadud, Z.; Ahmed, S. QL-EEBDG: QLearning based energy balanced routing in underwater sensor networks. EAI Endorsed Trans. Energy Web 2018, 5, e15. [Google Scholar]
- Ali, T.; Jung, L.T.; Faye, I. Diagonal and vertical routing protocol for underwater wireless sensor network. Procedia-Soc. Behav. Sci. 2014, 129, 372–379. [Google Scholar] [CrossRef]
- Draz, U.; Ali, T.; Yasin, S.; Naseer, N.; Waqas, U. A parametric performance evaluation of SMDBRP and AEDGRP routing protocols in underwater wireless sensor network for data transmission. In Proceedings of the 2018 International Conference on Advancements in Computational Sciences (ICACS), Lahore, Pakistan, 19–21 February 2018; pp. 1–8. [Google Scholar]
- Farooq, W.; Ali, T.; Shaf, A.; UMAR, M.; Yasin, S. Atomic-shaped efficient delay and data gathering routing protocol for underwater wireless sensor networks. Turk. J. Electr. Eng. Comput. Sci. 2019, 27, 3454–3469. [Google Scholar] [CrossRef]
- Ali, T.; Jung, L.T.; Faye, I. Three hops reliability model for underwater wireless sensor network. In Proceedings of the 2014 International Conference on Computer and Information Sciences (ICCOINS), Kuala Lumpur, Malaysia, 3–5 June 2014; pp. 1–6. [Google Scholar]
- Prabha, K.L.; Selvan, S. Energy efficient energy hole repelling (EEEHR) algorithm for delay tolerant wireless sensor network. Wirel. Pers. Commun. 2018, 101, 1395–1409. [Google Scholar] [CrossRef]
- Shaf, A.; Ali, T.; Farooq, W.; Draz, U.; Yasin, S. Comparison of DBR and L2-ABF routing protocols in underwater wireless sensor network. In Proceedings of the 2018 15th International Bhurban Conference on Applied Sciences and Technology (IBCAST), Islamabad, Pakistan, 9–13 January 2018; pp. 746–750. [Google Scholar]
- Draz, U.; Ali, T.; Yasin, S.; Fareed, A.; Shahbaz, M. Watchman-based Data Packet Forwarding Algorithm for Underwater Wireless Sensor and Actor Networks. In Proceedings of the 2019 International Conference on Electrical, Communication, and Computer Engineering (ICECCE), Swat, Pakistan, 24–25 July 2019; pp. 1–7. [Google Scholar]
- Ali, T.; Yasin, S.; Draz, U.; Ayaz, M. Towards formal modeling of subnet based hotspot algorithm in wireless sensor networks. Wireless Pers. Commun. 2019, 107, 1573–1606. [Google Scholar] [CrossRef]
- Draz, U.; Ali, T.; Yasin, S.; Waqas, U.; Rafiq, U. EADSA: Energy-Aware Distributed Sink Algorithm for Hotspot Problem in Wireless Sensor and Actor Networks. In Proceedings of the 2019 International Conference on Engineering and Emerging Technologies (ICEET), Lahore, Pakistan, 21–22 February 2019; pp. 1–6. [Google Scholar]
- Ayaz, M.; Abdullah, A.; Faye, I. Hop-by-hop reliable data deliveries for underwater wireless sensor networks. In Proceedings of the 2010 International Conference on Broadband, Wireless Computing, Communication and Applications, Fukuoka, Japan, 4–6 November 2010; pp. 363–368. [Google Scholar]
- Wang, Z.; Han, G.; Qin, H.; Zhang, S.; Sui, Y. An energy-aware and void-avoidable routing protocol for underwater sensor networks. IEEE Access 2018, 6, 7792–7801. [Google Scholar] [CrossRef]
- Kamaruddin, A.; Ngadi, M.A.; Harun, H. Energy Efficient Opportunistic Routing Protocol (EE-OR) for Underwater Wireless Sensor Network. J. Phys. Conf. Ser. 2019, 1174, 012010. [Google Scholar] [CrossRef]
- Liou, E.C.; Kao, C.C.; Chang, C.H.; Lin, Y.S.; Huang, C.J. Internet of Underwater Things: Challenges and routing protocols. In Proceedings of the 2018 IEEE International Conference on Applied System Invention (ICASI), Chiba, Japan, 13–17 April 2018; pp. 1171–1174. [Google Scholar]
- Arora, P.; Jain, S. Underwater Sensor Network Delay Aware Routing Protocols: A Survey. In Proceedings of the 3rd International Conference on Internet of Things and Connected Technologies (ICIoTCT), Jaipur, India, 26–27 March 2018; pp. 26–27. [Google Scholar]
- Khalid, M.; Cao, Y.; Arshad, M.; Khalid, W.; Ahmad, N. Routing Challenges and Associated protocols in Acoustic Communication. In Magnetic Communications; CRC Press: Boca Raton, FL, USA, 2018; pp. 91–103. [Google Scholar]
- Ahmed, M.; Parveen, S.; Hussain, N.; Naeem, N.; Malookani, R. VNR: Void Node Removal Routing Protocol for Underwater Wireless Sensor Network. IJCSNS 2018, 18, 162–169. [Google Scholar]
- Coutinho, R.W.; Boukerche, A.; Vieira, L.F.; Loureiro, A.A. A novel void node recovery paradigm for long-term underwater sensor networks. Ad Hoc Netw. 2015, 34, 144–156. [Google Scholar] [CrossRef]
- Xie, P.; Zhou, Z.; Peng, Z.; Cui, J.H.; Shi, Z. Void avoidance in three-dimensional mobile underwater sensor networks. In Proceedings of the International Conference on Wireless Algorithms, Systems, and Applications, Boston, MA, USA, 16–18 August 2009; pp. 305–314. [Google Scholar]
- Garcia, M.; Sendra, S.; Atenas, M.; Lloret, J. Underwater wireless ad-hoc networks: A survey. In Mobile Ad Hoc Networks: Current Status and Future Trends; CRC Press: Boca Raton, FL, USA, 2012; pp. 379–411. [Google Scholar]
- Zeng, Z.; Fu, S.; Zhang, H.; Dong, Y.; Cheng, J. A survey of underwater optical wireless communications. IEEE Commun. Surv. Tutor. 2016, 19, 204–238. [Google Scholar] [CrossRef]
- Yang, Y.; Xiao, Y.; Li, T. A Survey of Autonomous Underwater Vehicle Formation: Performance, Formation Control, and Communication Capability. IEEE Commun. Surv. Tutor. 2021. [Google Scholar] [CrossRef]
- Mhemed, R.; Comeau, F.; Phillips, W.; Aslam, N. Void Avoidance Opportunistic Routing Protocol for Underwater Wireless Sensor Networks. Sensors 2021, 21, 1942. [Google Scholar] [CrossRef] [PubMed]
- Ashraf, S.; Gao, M.; Chen, Z.; Naeem, H.; Ahmad, A.; Ahmed, T. Underwater Pragmatic Routing Approach Through Packet Reverberation Mechanism. IEEE Access 2020, 8, 163091–163114. [Google Scholar] [CrossRef]
- Patel, Z.; Rana, K. LAVR: Link failure avoidance and void recovery routing protocol for underwater sensor networks. Int. J. Sens. Netw. 2020, 34, 253–271. [Google Scholar] [CrossRef]
- Luo, J.; Chen, Y.; Wu, M.; Yang, Y. A Survey of Routing Protocols for Underwater Wireless Sensor Networks. IEEE Commun. Surv. Tutor. 2021, 23, 137–160. [Google Scholar] [CrossRef]
- Hao, K.; Ding, Y.; Li, C.; Wang, B.; Liu, Y.; Du, X.; Wang, C. An Energy-Efficient Routing Void Repair Method Based on an Autonomous Underwater Vehicle for UWSNs. IEEE Sens. J. 2020, 21, 5502–5511. [Google Scholar] [CrossRef]
- Zhang, J.; Cai, M.; Han, G.; Qian, Y.; Shu, L. Cellular clustering-based interference-aware data transmission protocol for underwater acoustic sensor networks. IEEE Trans. Veh. Technol. 2020, 69, 3217–3230. [Google Scholar] [CrossRef]
- Ganesh, N. Performance Evaluation of Depth Adjustment and Void Aware Pressure Routing (DA-VAPR) Protocol for Underwater Wireless Sensor Networks. Comput. J. 2020, 63, 193–202. [Google Scholar] [CrossRef]
- Draz, U.; Ali, T.; Asghar, K.; Yasin, S.; Sharif, Z.; Abbas, Q.; Aman, S. A Comprehensive Comparative Analysis of Two Novel Underwater Routing Protocols. IJACSA 2019, 10, 4. [Google Scholar] [CrossRef]
- Draz, U.; Yasin, S.; Ali, A.; Khan, M.A.; Nawaz, A. Traffic Agents-Based Analysis of Hotspot Effect in IoT-Enabled Wireless Sensor Network. In Proceedings of the 2021 International Bhurban Conference on Applied Sciences and Technologies (IBCAST), Islamabad, Pakistan, 12–16 January 2021; pp. 1029–1034. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Routing Scheme/Protocols | Single/Multiple Copies | Empty Regions Types Considered | Features | Single/Multi Sink | Assumptions | Knowledge Required/Maintained | Achievements | Limitations |
|---|---|---|---|---|---|---|---|---|
| DFR [10] | Multiple | Bypass the empty regions while flooding | Allow to at least one node participation during detection of empty regions | Single sink | Free error-prone link quality by flooding | Whole network | Improved network architecture w.r.to Empty regions | Not every time bypass the empty region while flooding |
| ANA (CTC + DTC) [8] | Multiple | Centralized and distributed architecture is deploying for Empty regions | Long term propagation model has been used | Multi-sink | Depth-control mechanism is used | Whole network | 90% PDR is achieved using DA + CTC and DA + DTC | Highly used of energy consumptions are found |
| GEDAR [9] | Single copy | Empty regions are found by fixing the depth adjustment | Greedy approach is used | Multi-sink | Geographic and opportunistic routing scheme is introduced | Own and Sink location | Empty regions are easily located. It calculates the new depth for the sonobuoys for the delivery of the data. | The selection of neighboring sets has some trade-offs |
| DCR [11] | Multiple | Similar to GEDAR but not fixing the depth | For topology control, vertical movements are introduced | Multi-sink | For depth adjustment, by checking the status of neighboring nodes | Own, 1-hop neighbors and sink info. | Throughput and lifetime are achieved; further long routes are also established by depth control adjustment. | For every time the depth is calculated for flooding, so large end-to-end delays occurred |
| SWARM-SEA [11] | Single copy | Similar to GEDAR and DCR with energy architecture SWARM | To know in advance about empty regions | Multi-sink | Hybrid approach by using the strategy of DCR and GEDAR | Own and Sink location info. | Improved the empty regions fixing as expectations | Thus, the scheme is run in hybrid mode, and complexities are increased in underwater nodes movements |
| VARP [12] | Multiple | 4G mechanism including space and time used for avoidance of Empty regions | Used for monitoring purpose of empty regions using on-board pressure gauges | Single sink | Hop count, sequence number and dummy depth information is considered for finding the empty regions | Uses three parameters like hop count, sequence number and depth information for making the direct path to the closest sonobuoys | Works well for empty region, location and depth is directly control the onboard surface station. | Longest propagation delay occurs, at every hop count location does not be accurate for empty regions |
| L2-ABF [6,7] | Single copy | Using angle-based hierarchy the occurrence of empty regions neglectable | Every node calculated its flooding angle by angle cone towards the destination | Single sink | First, every node calculates the angle for next hop-count and then forwards the packets | Own cluster info. (1-hop) | No need to explicit location information about the nodes, IDs are assigned, and novel layer-by layer hierarchy is used | Before the flooding, each time angle zone is calculated, so the unexpected delays occur |
| AHH-VBF [13] | Single copy | Empty regions are detected by using hop-by-hop | Instead of angle, vector based forwarding approach is used | Single sink | Does not take any classical assumptions | Early radius information is required | Radios information is done by using acoustic wavelength, therefore no need to take extra calculation between source and destination | Consumption of battery issues are highly affected |
| H2-DARPPM [14] | Single copy | Hop-by-hop dynamic addressing is considered | Parametric values of the selection of nodes is based upon the reminding energy | n/a | For monitoring empty regions, the pipelines approach is used | Nodes location is required. | Easily identify any type of disturbance by pipeline approach | Approach is costly for network topology |
| VBVA [15] | Multiple | Radius information is considered for detection of empty regions for every hop-count | Vector based void avoidance is used to address the void routing table | Multi-sink | Vector shift and back pressure to tackle the void empty regions | Radios information of the nodes are required | It is the first void empty region protocol that works with 3-dimensional topology with mobile nodes. | While using back pressure to avoid the concave empty regions, this process is too long |
| EE-WBA [16] | Single copy | Energy efficient watchman-based monitoring is used to consider the empty regions | Novel nodes like watchman are deployed around the sink | Multi-sink | Watchman with its secondary nodes are easily coped with sink neighboring nodes | Deployment of the watchman is based upon nodes’ movement with multi-sink architecture | Easily identify the hotspot regions with watchman nodes and improve the PDR | The energy of watchman is counterpart throughout the network lifetime |
| NADEEM [17] | Multiple | Data are only forwarded to its nodes when the neighboring nodes is clear cut from void nodes | Two novel approaches like FA-NADEEM and TA-NADEEM are work for void nodes | Multi-sink | Data are only forwarded to its nodes when the neighboring nodes is clear cut from void nodes | Status of corresponding nodes on the forwarding route is required | Improved PDR, and detection of void nodes to some extent | Low network throughput, fails to find another routing path when the void nodes are present on a dedicated path |
| ABF [6] | Single copy | Angle-based flooding is used to tackle the empty regions | Acute Angle is calculating for flooding | Multi-sink | Every Angle calculation is based upon for flooding like 180/2 | Angle cone | Improved end-to-end delay | Empty regions problem exists to some extent |
| DBR [18] | Single copy | Depth-based routing approach is used by calculating the depth before data flooding | Using depth easy to cope with shallow water | Multi-sink | Firstly, the proper depth is calculated by the available number of nodes | Depth area | Improved durability and stability of the network | Not every time the exact depth is calculated for flooding |
| EECOR [19] | - | Relay set determine the source nodes before sending/broadcasting | Relay source nodes scheme | - | Introducing relay nodes using fuzzy based relay section scheme for forwards the packets | - | Improve throughput and energy consumption ratio | High end-to-end delay |
| PERP [20] | - | Forwarding node selector is used | Trimming mechanism is adopted | - | Using a power efficient communication scheme | - | Improve the effectiveness and feasibility of power based routing | Propagation latency is high |
| Greedy routing [21] | Both single and multiple copy | Using location-based and location free routing for nodes position | Pre-determined location of nodes is achieved | - | Assume GPS-based information of nodes | Beacon-based and pressure-based protocols | Due to self-comparison, the realistic parameters are achieved | Finding information about nodes is too costly |
| Location Free Routing [22] | Both single and multiple copy | Location free link-state mechanism is used | Every node selects a one-hop neighbor within an area that guarantees progress toward a sink | - | Packet forwarding is performed hop-by-hop considering one or several routing metrics | Using link-state strategy used between nodes | Loop-free strategy also improves network topology | High data packet loss ratio, further link is breaking the network topology is disturbed |
| Co-EEORS [23] | Not information | Cooperative routing among nodes | Using the optimal relay section of nodes | Multi sink | Chose a relay and destination node | Relay node information is required | Superior for delivery of data packets | Throughput is minimum among compared technique EE-DBR |
| Hybrid routing [24,25] | Both single and multi-copy | Used opportunistic and geo-graphic routing protocols | Using optical acoustic hybrid OA-UWSN | - | Using SDMA, enable to take real-time video and image analysis | - | - | In this scheme, network topology changes frequently |
| Opportunistic Routing Protocol [26] | Both single and multi-copy | - | Number of neighbors participating for forwarding the data | - | Using Dempster–Shafer evidence theory-based opportunistic routing (EBOR) protocol | - | Improve network lifetime and packet delivery | High energy consumption |
| QL-EEBDG [27] | - | Q-learning based efficient data gathering scheme | Not information | - | Optimal next-hop forwarder | - | Improve energy parameters | High delay and PLR |
| DVRP [28] | Single copy | Diagonal and vertical path is used | Using two may communication | Single sink | Vertical path is easily supported with diagonal movement | Number of nodes on the diagonal path is required | Improved data delivery and throughput | Routing cache overhead |
| SMDBRP and AEDGRP [29] | Single copy | - | Using a mobile sink | Single sink | Dynamic topology for sink movement | - | Efficient data gathering mechanism | Trade-offs relationship exist |
| ASEDGRP [30] | Single copy | Atomic path shaped data route is proposed | Novel path adjustment is prepared | Multi sink | AUVs used for data gathering purposes | Localize information is required | Efficient path and optimize routing is achieved | Longest the path makes delay |
| 3H-RM [31] | Multiple | Data are sent up to three hopes | By sending data to the destination, it first sends the data to the nearest nodes | Multi sink | Data packet delivery starts when the three hops are completed | Hope based nodes information required | Node reliability is achieved by using a hope-based mechanism | Not be energy efficient |
| EEEHR [32] | Multiple | Assume hole repelling scheme | Smaller cluster is formed to make a larger one | - | Equal sharing of load repelling | Using cluster-based node selection | Improve various parameters with LEACH | Trade-offs |
| DBR and L2-ABF [33] | Multiple | - | Both have used proper mechanism used for data flooding | Multi sink | Depth and angle-based information is required | - | Nagle and depth both are efficient for data delivery | Trade-offs relationship is existing |
| Watchman Based Flooding [34] | Single copy | Similar to ABF but angle is not calculated, watchman itself calculate where to flood for empty regions | Novel watchman-based flooding is proposed | Single sink | Multi sink architecture | Assume to be best routing flooding to enhance the ratio of un-empty regions | Successfully compared with state-of-the-art technique like L2-ABF, simulation results show the improvement in network lifetime. | Highly energy is needed to deploy this technique |
| Subnet Based Backup Assigning Algorithm (SBBA) [35] | Single copy | For avoiding the empty areas, the network is dividing into subnets | Subnet, subnet head and gateways are helping out in this regard | Single sink | - | Source to sink information | By subnetting easily handles the large traffic of the network and improve the minimum target of avoidance of void holes. | Formally verified the technique but the further need for simulation |
| Eneregy Aware Distributed Sink Algorithm (EADSA) [36] | Multiple | Distributed sink is deploying for this purpose | Energy of distributed sink is distributed to among all nodes | Single sink | Sink has dynamic nature form the routing EADSA | Only node location and its routing information is required | Successfully monitors as well as maintains the network architecture. | Empty regions are existing, but it does not be identified by EADSA |
| 2H-ACK [37] | Multiple | For early realization, first 2 hops are required to take the decision | Hop-by-hop delivery is possible to receive the acknowledgments | Multi-sink | Acknowledge is counted from the nodes when the 2H are functional | Only ACK information is required | Find the nodes with minimal hops counts, only two. | Empty regions exist |
| Simulation Constraints | Values |
|---|---|
| Experimented Nodes | 600 |
| Network volume (m3) | 2000 m × 2000 m × 2000 m |
| Trang (m) | 300 |
| Ptx (W) | 2 |
| Initial Energy (J) | 100 |
| Pr (W) | 0.2 |
| Pi Idle power (W) | 0.02 |
| F (KHz) | 10 |
| Ps (Bytes) | 100 |
| Baseline Approach | L2-ABF |
| Under Study Protocol | TANVEER |
| Schemes | Features | Achieved Parameters | Trade-Offs |
|---|---|---|---|
| L2-ABF [6,7] | Geographic routing with layer-by-layer angle-based flooding for data communication underwater | Avoidance of empty regions results has increased the performance of the network | Maximum probability of void nodes and energy consumption for each iteration of angle computing |
| TANVEER | Geographic and opportunistic routing scheme using three-angle adjustment and watchman-based transmission | Increased PDR and throughput of the network by bypass the empty nodes/regions | Observed high end-to-end delay to maximum coverage area |
| LBA-TANVEER | Layer-based adjustment with data collision avoidance mechanism | Improved network topology and performance with adjustment of nodes | Not enough control, due to the dynamic nature of the environment but accurate detection of empty nodes is possible |
| DPD-TANVEER | Using path change mechanism by bypassing the empty regions | Improved PDR, throughput and fraction of empty regions | Due to path change, a long propagation delay occurred is not good |
| BIN-TANVEER | Works with novel watchman nodes using watchman-based transmission | Improved PDR and try to decrease PLR | Energy consumption is high |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Draz, U.; Yasin, S.; Irfan, M.; Ali, T.; Ali, A.; Glowacz, A.; Brumercik, F.; Glowacz, W. TANVEER: Tri-Angular Nearest Vector-Based Energy Efficient Routing for IoT-Enabled Acoustic Sensor and Actor Networks (I-ASANs). Sensors 2021, 21, 3578. https://doi.org/10.3390/s21113578
Draz U, Yasin S, Irfan M, Ali T, Ali A, Glowacz A, Brumercik F, Glowacz W. TANVEER: Tri-Angular Nearest Vector-Based Energy Efficient Routing for IoT-Enabled Acoustic Sensor and Actor Networks (I-ASANs). Sensors. 2021; 21(11):3578. https://doi.org/10.3390/s21113578
Chicago/Turabian StyleDraz, Umar, Sana Yasin, Muhammad Irfan, Tariq Ali, Amjad Ali, Adam Glowacz, Frantisek Brumercik, and Witold Glowacz. 2021. "TANVEER: Tri-Angular Nearest Vector-Based Energy Efficient Routing for IoT-Enabled Acoustic Sensor and Actor Networks (I-ASANs)" Sensors 21, no. 11: 3578. https://doi.org/10.3390/s21113578
APA StyleDraz, U., Yasin, S., Irfan, M., Ali, T., Ali, A., Glowacz, A., Brumercik, F., & Glowacz, W. (2021). TANVEER: Tri-Angular Nearest Vector-Based Energy Efficient Routing for IoT-Enabled Acoustic Sensor and Actor Networks (I-ASANs). Sensors, 21(11), 3578. https://doi.org/10.3390/s21113578