
Data Delivery in a Disaster or Quarantined Area Divided into Triangles Using DTN-Based Algorithms for Unmanned Aerial Vehicles




Abstract
1. Introduction
2. Materials and Methods
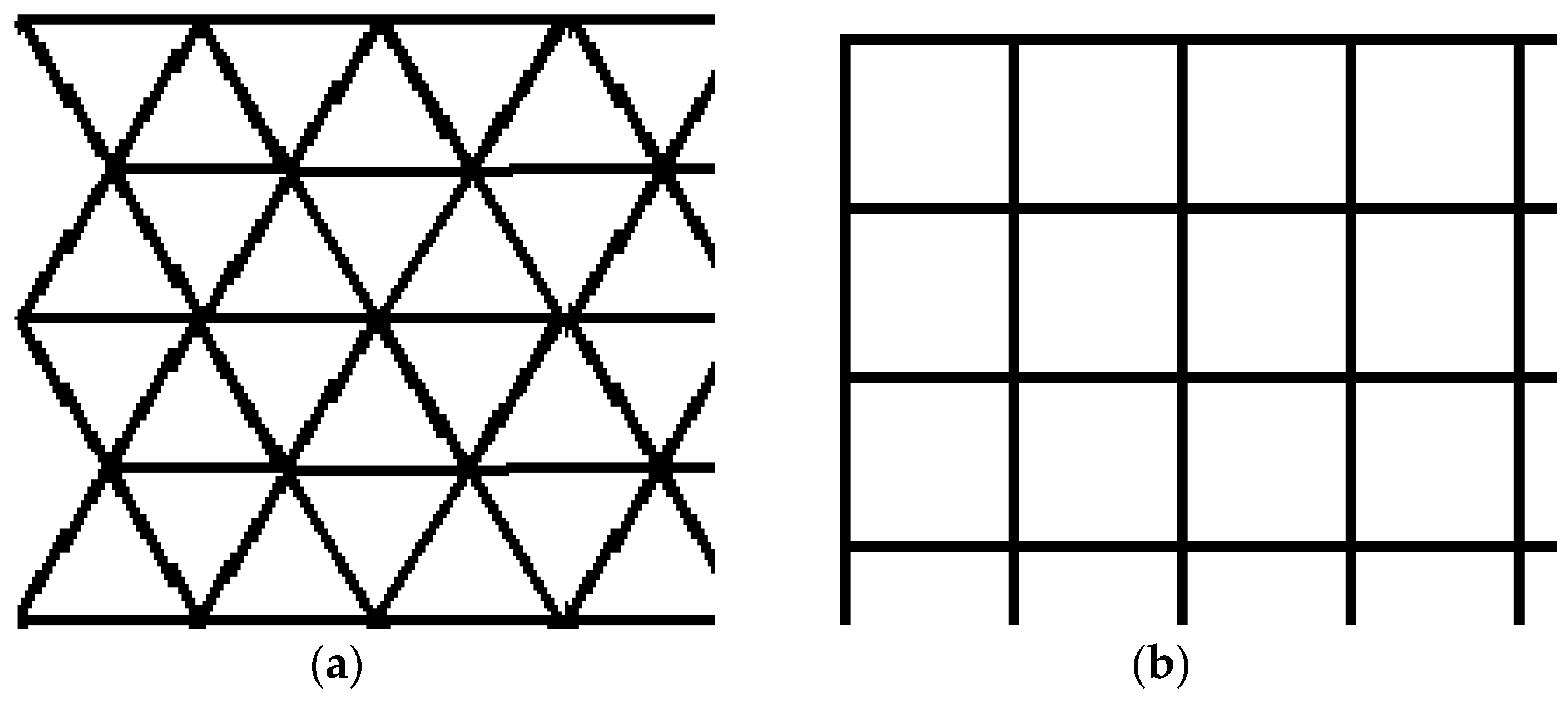
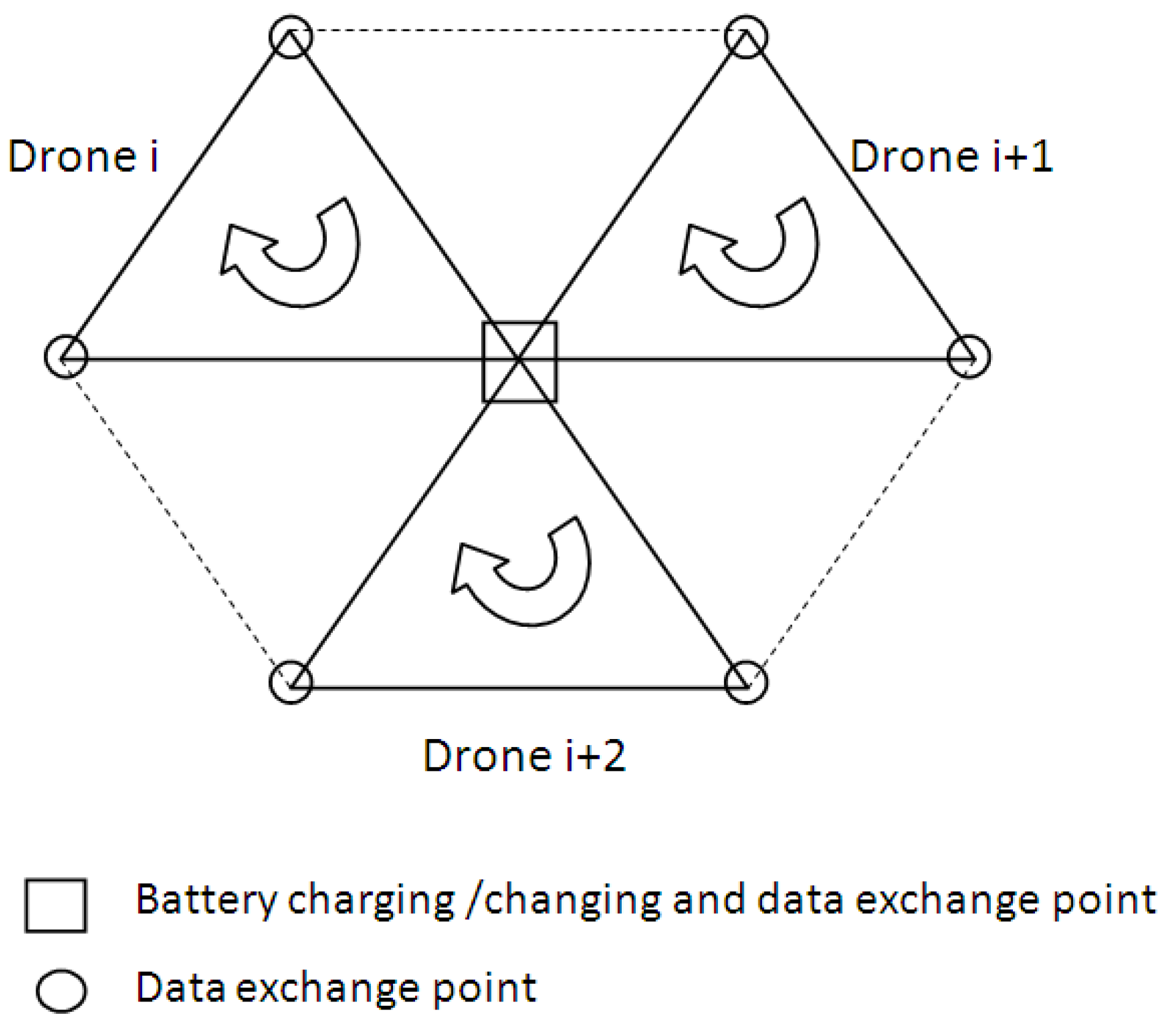
2.1. Area Mapping Method Using UAVs Flying on Regular Polygons
2.2. Algorithms for DTNs with UAVs
2.3. Performance Evaluation by Simulation of the UAV Network
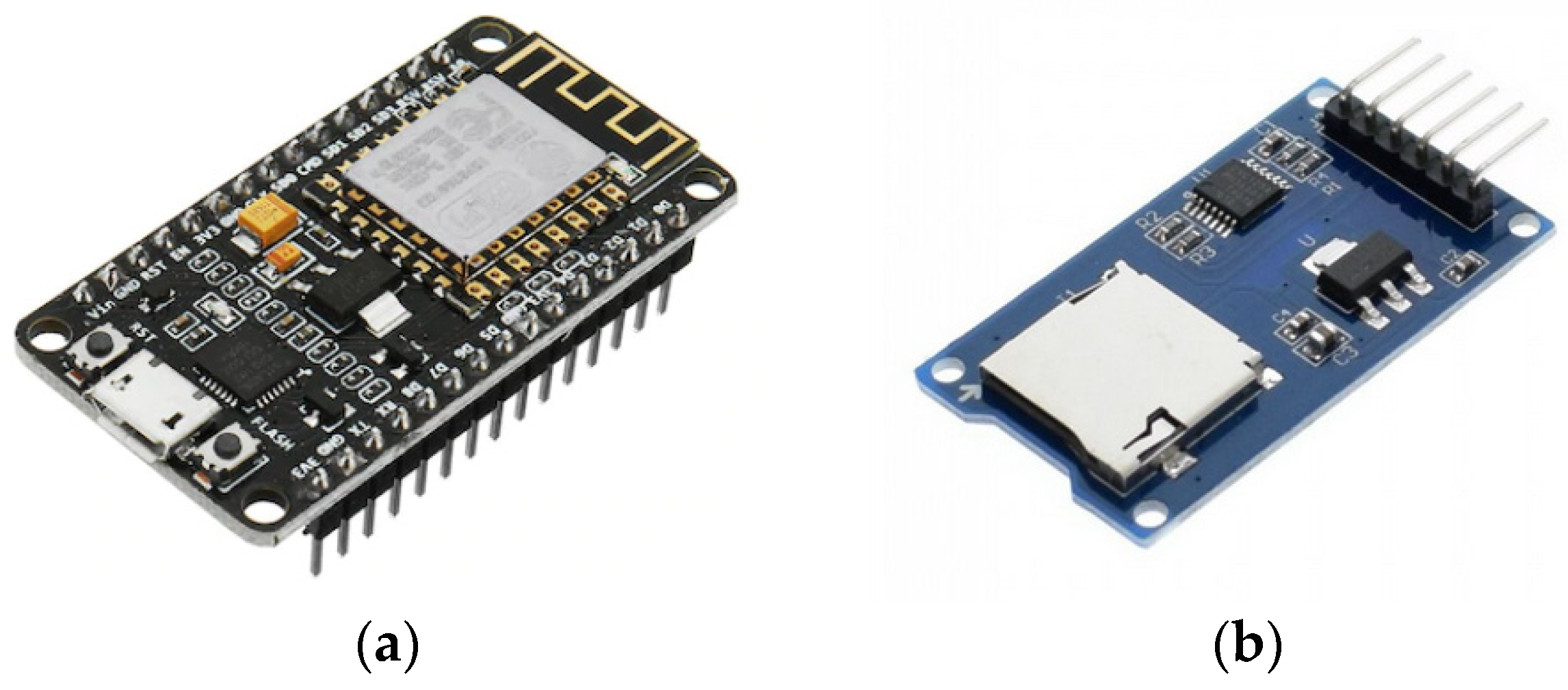
2.3.1. UAV Characteristics and Experimental Flight Tests
2.3.2. Simulation of the UAV Network
- Defining the map (Figure 12) in wkt file format, in which the coordinates of all the points that establish the route of each UAV on the map have been defined.
- Implementing the algorithms that define the mobility of UAVs:
- ▪
- establishing the initial positions of UAVs and the recharge/swapping points;
- ▪
- associating each UAV with a recharger/swapping point;
- ▪
- establishing stationary points for data transfer;
- ▪
- defining the route of each UAV;
- Establishing the simulation parameters as shown in Table 4. The time parameters (the travel autonomy time, the hovering time for the transfer points, and the parking time) in the charging points or swapping points were established based on the experimental flight tests of the DJI Mavic 2 Pro UAV.
3. Results
3.1. Results of Experimental Flight Tests
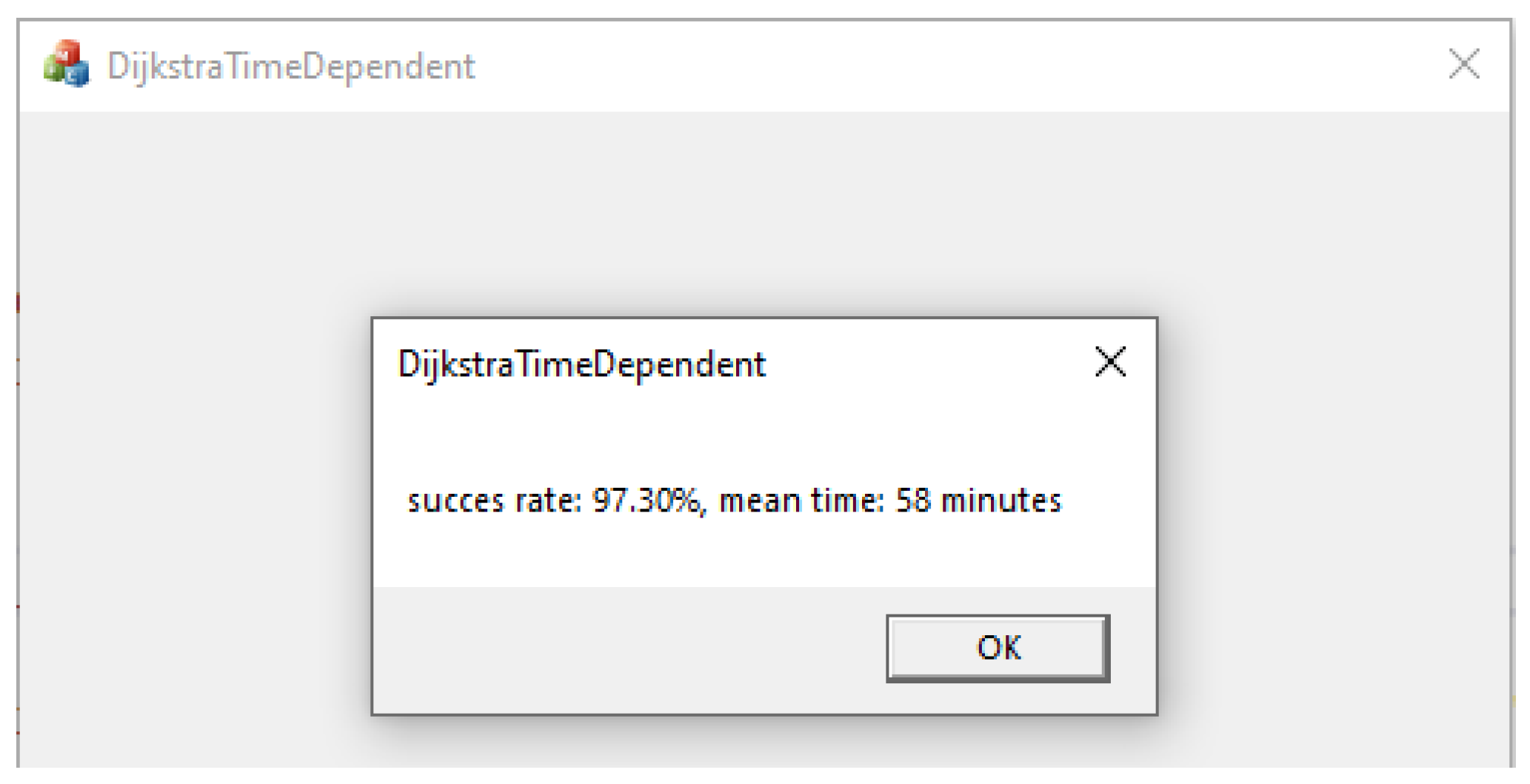
3.2. Simulation Results
4. Discussion
5. Conclusions
- A novel method for mapping an area using regular polygons was proposed. The proposed network of cells to cover a geographical area is hexagonal, each having three UAVs.
- A new methodology based on experimental preliminary flight tests for a network cell was proposed to simulate a UAV cell network.
- A new TD-UAV Dijkstra algorithm and well-known DTN algorithms were analyzed to simulate UAV networks with a well-established mobility schedule.
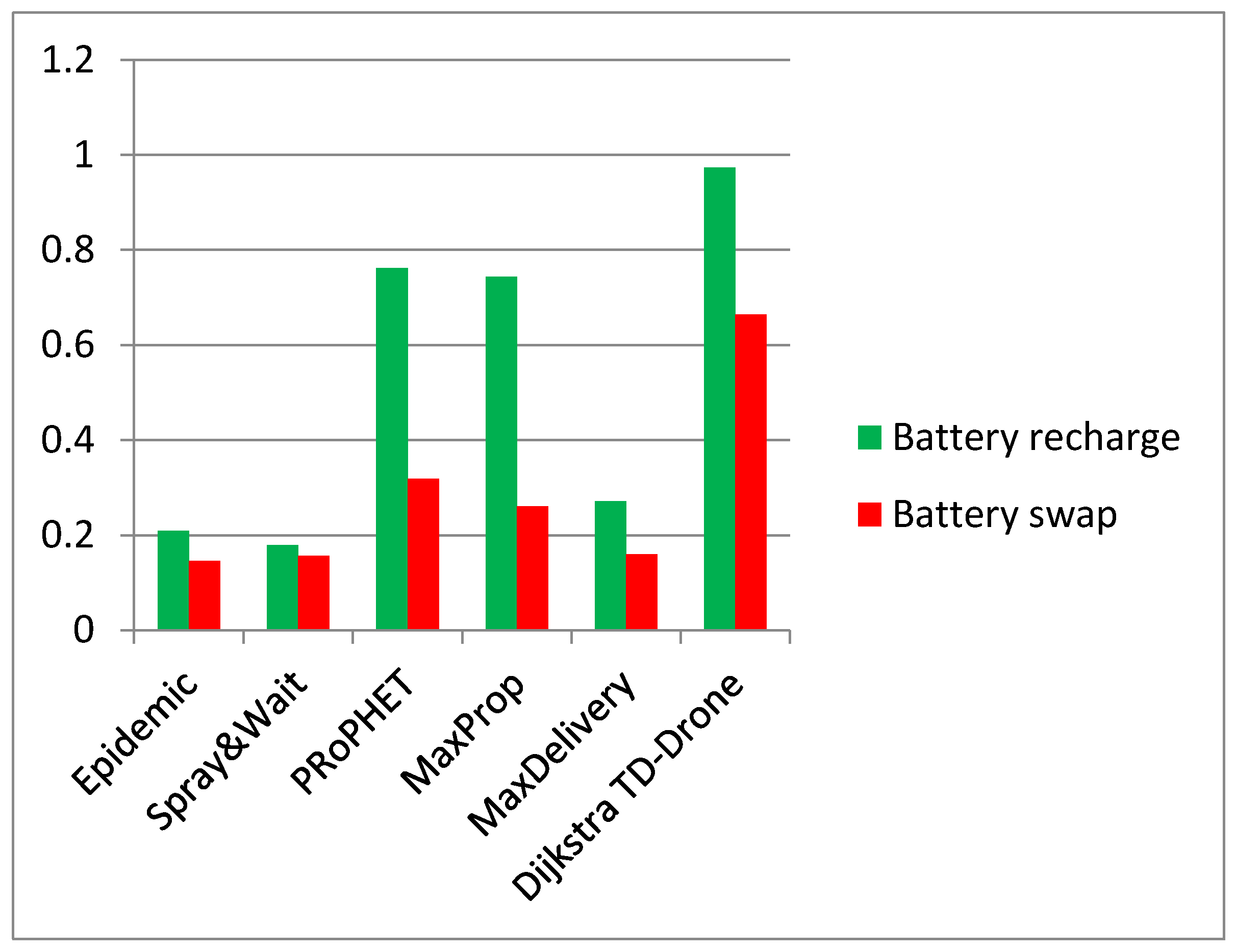
- A delivery rate of 0.146 to 0.644 in the UAV network with a respective battery charge of 0.179 to 0.973 with battery swapping was found. The best results were obtained for the TD-UAV Dijkstra algorithm, which delivered most of the data packages in the shortest delivery time. The average latency was 1.48 h for the UAV network with battery recharge and 0.45 h for the UAV network with battery swapping.
- The Epidemic, Spray and Wait, and MaxDelivery algorithms produced poorer results due to the small number of contacts between nodes and a low number of message exchanges.
- The fastest communication was obtained for a UAV triangular network with a battery charge. It was found that the battery swapping scenario led to an increase of ~46% for the delivery rate against the battery charge scenario.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Alessi, N.; Caini, C.; de Cola, T.; Martin, S.; Mayer, J.P. DTN Performance in Complex Deep-Space Networks. In Proceedings of the ASMS 2018, Berlin, Germany, 10–12 September 2018; pp. 1–7. [Google Scholar]
- Cerf, V.; Hooke, A.; Torgerson, L.; Durst, R.; Scott, K.; Fall, K.; Weiss, H. Delay-Tolerant Networking Architecture. Internet RFC 4838. 2007. Available online: http://www.rfc-editor.org/rfc/rfc4838.txt (accessed on 25 June 2020).
- Bertolazzi, M.; Caini, C. Mars to Earth Data Downloading: A Directory Synchronization Approach. Future Internet 2019, 11, 173. [Google Scholar] [CrossRef]
- Tornell, S.M.; Calafate, C.T.; Cano, J.C.; Manzoni, P. DTN Protocols for Vehicular Networks: An Application Oriented Overview. IEEE Commun. Surv. Tutor. 2015, 17, 868–887. [Google Scholar] [CrossRef]
- Urquiza-Aguiar, L.; Tripp-Barba, C.; Aguilar Igartua, M. A Geographical Heuristic Routing Protocol for VANETs. Sensors 2016, 16, 1567. [Google Scholar] [CrossRef]
- Gkioulos, V.; Gunleifsen, H.; Weldehawaryat, G.K. A Systematic Literature Review on Military Software Defined Networks. Future Internet 2018, 10, 88. [Google Scholar] [CrossRef]
- Zguira, Y.; Rivano, H.; Meddeb, A. Internet of Bikes: A DTN Protocol with Data Aggregation for Urban Data Collection. Sensors 2018, 18, 2819. [Google Scholar] [CrossRef] [PubMed]
- Tikhonov, E.; Schneps-Schneppe, D.; Namio, D. Delay Tolerant Network Potential in a Railway Network. In Proceedings of the 2020 IEEE 26th Conference of Open Innovations Association (FRUCT), Yaroslavl, Russia, 20–24 April 2020; pp. 438–448. [Google Scholar]
- Natkaniec, M. Ad hoc mobile wireless networks: Principles, protocols, and applications. IEEE Commun. Mag. 2009, 47, 12–14. [Google Scholar] [CrossRef]
- Picu, A.; Spyropoulos, T. Forecasting DTN performance under heterogeneous mobility: The case of limited replication. In Proceedings of the 9th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON), Seoul, Korea, 18–21 June 2012; pp. 569–577. [Google Scholar]
- Warthman, F. Delay-and Disruption-Tolerant Networks (DTNs). Warthman Associates, Version 3.2. 2015. Available online: ipnsig.org/wp-content/uploads/2015/09/DTN_Primer_v3.2.pdf (accessed on 25 June 2020).
- Wong, K.S.; Wan, T.C. Current State of Multicast Routing Protocols for Disruption Tolerant Networks: Survey and Open Issues. Electronics 2019, 8, 162. [Google Scholar] [CrossRef]
- Mengjuan, L.; Yan, Y.; Zhiguang, Q. A Survey of Routing Protocols and Simulations in Delay-Tolerant Networks, Wireless Algorithms, Systems, and Applications, vol. 6843 of Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2011; pp. 243–253. [Google Scholar]
- Nikam, D.D.; Singh, H.P.; Kushwah, R. Conditional Shortest Path Routing in Delay Tolerant Networks. Int. J. Adv. Res. Sci. Eng. 2017, 6, 1. [Google Scholar]
- Jain, S.; Fall, K.; Patra, R. Routing in a Delay Tolerant Network. In Proceedings of the 2004 conference on Applications, Technologies, Architectures, and Protocols for Computer Communications, Portland, Oregon, USA, 30 August–03 September 2004. ACM SIGCOMM Comput. Commun. Rev. 2004, 34, 145–158. [Google Scholar] [CrossRef]
- Kawakib, K.A.; Mohd, H.O.; Suhaidi, H. Survey and Comparison of Operating Concept for Routing Protocols in DTN. J. Comput. Sci. 2016, 12, 141–152. [Google Scholar]
- Spyropoulos, T.; Psounis, K.; Raghavendra, C.S. Single-copy routing in intermittently connected mobile networks. In Proceedings of the 1st Annual IEEE Communications Society Conference on Sensor and Ad Hoc Communications and Networks, Santa Clara, CA, USA, 4–7 October 2004; pp. 235–244. [Google Scholar]
- Vahdat, A.; Becker, D. Epidemic Routing for Partially-Connected Ad Hoc Networks. Tech. Rep. CS-2000–06; Duke University: Duhram, NC, USA, 2000. [Google Scholar]
- Raghavendra, C.; Spyropoulos, T.; Psounis, K. Spray and Wait: An Efficient Routing Scheme for Intermittently Connected Mobile Networks. In Proceedings of the ACM SIGCOMM Workshop on Delay-Tolerant Networking (WDTN), Philadelphia, PA, USA, 26 August 2005; pp. 252–259. [Google Scholar]
- Lindgren, A.; Doria, A.; Schelen, O. Probabilistic routing in intermittently connected networks. ACM SIGMOBILE Mob. Comput. Commun. 2003, 7, 19–20. [Google Scholar] [CrossRef]
- Burgess, J.; Gallagher, B.; Jensen, D.; Levine, B.N. MaxProp: Routing for Vehicle-Based Disruption-Tolerant Networks. In Proceedings of the IEEE INFOCOM 2006, Barcelona, Spain, 23–29 April 2006. [Google Scholar]
- Nanau, C.Ş. Maximum flow in buffer-limited delay tolerant networks. The static approach. Bull. Transilv. Univ. Bras. Ser. III Math. Inform. Phys. 2020, 13, 363–372. [Google Scholar] [CrossRef]
- Schiopu, C.; Ciurea, E. Maximum flows in planar dynamic networks with lower bounds. Fundam. Inform. 2018, 163, 189–204. [Google Scholar] [CrossRef]
- Spaho, E. Energy consumption analysis of different routing protocols in a Delay Tolerant Network. J. Ambient Intell. Humaniz. Comput. 2020, 11, 3833–3839. [Google Scholar] [CrossRef]
- Li, T.; Kong, Z.; Zhang, L. Supporting Delay Tolerant Networking: A Comparative Study of Epidemic Routing and NDN. In Proceedings of the 2020 IEEE International Conference on Communications Workshops (ICC Workshops), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Mao, Y.; Zhou, C.; Ling, Y.; Lloret, J. An Optimized Probabilistic Delay Tolerant Network (DTN) Routing Protocol Based on Scheduling Mechanism for Internet of Things (IoT). Sensors 2019, 19, 243. [Google Scholar] [CrossRef] [PubMed]
- Lee, T.R.; Buban, M.; Dumas, E.; Baker, C.B. On the Use of Rotary-Wing Aircraft to Sample Near-Surface Thermodynamic Fields: Results from Recent Field Campaigns. Sensors 2019, 19, 10. [Google Scholar] [CrossRef]
- Alaoui-Sosse, S.; Durand, P.; Medina, P.; Pastor, P.; Lothon, M.; Cernov, I. OVLI-TA: An Unmanned Aerial System for Measuring Profiles and Turbulence in the Atmospheric Boundary Layer. Sensors 2019, 19, 581. [Google Scholar] [CrossRef]
- Nolan, P.J.; Pinto, J.; González-Rocha, J.; Jensen, A.; Vezzi, C.N.; Bailey, S.C.C.; De Boer, G.; Diehl, C.; Laurence, R., III; Powers, C.W.; et al. Coordinated Unmanned Aircraft System (UAS) and Ground-Based Weather Measurements to Predict Lagrangian Coherent Structures (LCSs). Sensors 2018, 18, 4448. [Google Scholar] [CrossRef]
- Hu, T.; Wang, Y.; Ma, B.; Zhang, J. Orbit Angular Momentum MIMO with Mode Selection for UAV-Assisted A2G Networks. Sensors 2020, 20, 2289. [Google Scholar] [CrossRef]
- Nazib, R.A.; Moh, S. Routing Protocols for Unmanned Aerial Vehicle-Aided Vehicular Ad Hoc Networks: A Survey. IEEE Access 2020, 8, 77535–77560. [Google Scholar] [CrossRef]
- Ge, X.H.; Zi, R.; Xiong, X.S.; Li, Q.; Wang, L. Millimeter wave communications with OAM-SM scheme for future mobile networks. IEEE J. Sel. Areas Commun. 2017, 35, 2163–2177. [Google Scholar] [CrossRef]
- Iranmanesh, S.; Raad, R. A Novel Data Forwarding Strategy for a Drone Delay Tolerant Network with Range Extension. Electronics 2019, 8, 659. [Google Scholar] [CrossRef]
- Kellermann, R.; Biehle, T.; Fischer, L. Drones for parcel and passenger transportation: A literature review. Transp. Res. Interdiscip. Perspect. 2020, 4, 100088. [Google Scholar] [CrossRef]
- Rango, F.; De Potrino, G.; Tropea, M.; Santamaria, A.F.; Fazio, P. Scalable and ligthway bio-inspired coordination protocol for FANET in precision agriculture applications. Comput. Electr. Eng. 2019, 74, 305–318. [Google Scholar] [CrossRef]
- Ferrer-González, E.; Agüera-Vega, F.; Carvajal-Ramírez, F.; Martínez-Carricondo, P. UAV Photogrammetry Accuracy Assessment for Corridor Mapping Based on the Number and Distribution of Ground Control Points. Remote Sens. 2020, 12, 2447. [Google Scholar] [CrossRef]
- Da Rosa, R.; Aurelio Wehrmeister, M.; Brito, T.; Lima, J.L.; Pereira, A.I.P.N. Honeycomb Map: A Bioinspired Topological Map for Indoor Search and Rescue Unmanned Aerial Vehicles. Sensors 2020, 20, 907. [Google Scholar] [CrossRef] [PubMed]
- Yang, P.; Tang, K.; Lozano, J.A.; Cao, X. Path planning for single unmanned aerial vehicle by separately evolving waypoints. IEEE Trans. Robot. 2015, 31, 1130–1146. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, H.; Di, B.; Song, L. Cellular controlled cooperative unmanned aerial vehicle networks with sense-and-send protocol. IEEE Int. Things J. 2018, 6, 1–13. [Google Scholar]
- Kima, S.J.; Lima, G.J.; Chob, J. Drone flight scheduling under uncertainty on battery duration and air temperature. Comput. Ind. Eng. 2018, 1171, 291–302. [Google Scholar] [CrossRef]
- Dhiman, N.K.; Deodhare, D.; Khemani, D. Where am I? Creating spatial awareness in unmanned ground robots using SLAM: A survey. Sadhana 2015, 40, 1385–1433. [Google Scholar] [CrossRef]
- Nănău, C.Ş. MaxDelivery: A new approach to a DTN Buffer Management. In Proceeding of the 21ST IEEE International Symposium on a World of Wireless, Mobile and Multimedia Networks (IEEE WOWMOM 2020), Cork, Ireland, 31 August–3 September 2020; pp. 60–61. [Google Scholar]
- Lewis, R. Algorithms for Finding Shortest Paths in Networks with Vertex Transfer Penalties. Algorithms 2020, 13, 269. [Google Scholar] [CrossRef]
- Wang, Y.; Yuan, Y.; Ma, Y.; Wang, G. Time-Dependent Graphs: Definitions, Applications, and Algorithms. Data Sci. Eng. 2019, 4, 352–366. [Google Scholar] [CrossRef]
- Udroiu, R.; Blaj, M. Conceptual design of a VTOL remotely piloted aircraft for emergency missions. Sci. Res. Educ. Air Force 2016, 18, 207–214. [Google Scholar] [CrossRef]
- DJI Mavic 2 Pro Specification, DJI. Available online: https://www.dji.com (accessed on 15 June 2020).
- Taddia, Y.; Corbau, C.; Zambello, E.; Pellegrinelli, A. UAVs for Structure-From-Motion Coastal Monitoring: A Case Study to Assess the Evolution of Embryo Dunes over a Two-Year Time Frame in the Po River Delta, Italy. Sensors 2019, 19, 1717. [Google Scholar] [CrossRef] [PubMed]
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M. Power Supply Architectures for Drones-A Review. In Proceedings of the 45th Annual Conference of the IEEE Industrial Electronics Society (IECON 2019), Lisbon, Portugal, 14–17 October 2019; pp. 5826–5831. [Google Scholar]
- High Power Drone Charging Pad and Infrastructure. Available online: https://skycharge.de/ (accessed on 26 October 2020).
- Costea, I.M.; Plesca, V. Automatic battery charging system for electric powered drones. In Proceedings of the 2018 IEEE 24th International Symposium for Design and Technology in Electronic Packaging (SIITME), Iasi, Romania, 25–28 October 2018; pp. 377–381. [Google Scholar]
- Herath, H.M.C.W.B.; Herath, H.M.S.; Sumangala, S.W.; de Silva, O.; Chathuranga, D.; Lalitharatne, T.D. Design and Development of an Automated Battery Swapping and Charging Station for Multirotor Aerial Vehicles. In Proceedings of the 17th International Conference on Control, Automation and Systems (ICCAS 2017), Ramada Plaza, Jeju, Korea, 18–21 October 2017; pp. 356–361. [Google Scholar]
- Lee, D.; Zhou, J.; Lin, W.T. Autonomous battery swapping system for quadcopter. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 118–124. [Google Scholar]
- WiFi NodeMCU ESP8266. Available online: https://www.espressif.com/en/products/socs/esp8266 (accessed on 25 June 2020).
- Keranen, A.; Ott, J.; Karkkainen, T. The ONE simulator for DTN protocol evaluation. In Proceedings of the 2nd International Conference on Simulation Tools and Techniques, Rome, Italy, 2–6 March 2009; pp. 1–10. [Google Scholar]
- Keranen, A. Opportunistic Network Environment Simulator. Special Assignment Report; Department of Communications and Networking, Helsinki University of Technology: Espoo, Finland, 2008. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Applications | Reference | Objective | Network |
|---|---|---|---|
| Meteorology | [27] | Obtain information about near-surface thermodynamic fields | No |
| [28] | Measure the temperature and relative humidity | No | |
| [29] | Measure the wind speed and wind direction | No | |
| Rescue mission | [37] | UAVs perform the building and exploration of a honeycomb map | Yes |
| Communications | [30] | Investigate the UAV-based air-to-ground-radio vortex wireless networks | Yes |
| [31] | Routing in a vehicular ad hoc network (VANET) | Yes | |
| Transportation | [33] | Exchange data packets during a contact such that the data Delivery delay decreases and the delivery ratio increases | Yes |
| [34] | Study the potential of delivery and passenger drones | No | |
| Agriculture | [35] | Coordinate drone movements in order to perform adequate count measures against parasite attacks | Yes |
| Cartography/photogrammetry | [36] | Aerial image acquisition and processing | No |
| Algorithm | Characteristics |
|---|---|
| Epidemic | TTL |
| Spray and wait | TTL, maximum allowed number of copies |
| PRoPHET | TTL, predictability |
| MaxProp | TTL, predictability, hop count |
| MaxDelivery | TTL, hop count |
| Dijkstra | drone timetable |
| Parameter | Value |
|---|---|
| Dimensions | 214 × 91 × 84 mm (length × width × height) |
| Max. Ascent/Descent Speed | 4 m/s; 3 m/s |
| Max. flight time (no wind) | 31 min (at a consistent 25 km/h) |
| Max. flight distance (no wind) | 18 km (at a consistent 50 km/h) |
| UAV battery | 3850 mAh, 1800 mA, 3.83 V |
| Weight with battery | 905 g |
| Approx. price | 1600 USD |
| Operating Temperature Range | 0–40 °C |
| Parameter | Triangular-Shaped Flight Mission |
|---|---|
| Number of UAVs for cruising | 48 |
| Number of fixed transfer points | 65 |
| Number of charging/changing battery points | 24 |
| Average cruise speed of a UAV | 47.37 km/h (13.16 m/s) |
| Flight height of UAVs | 30 m |
| Operating time of the UAV in one day | 11 h |
| Data transmission speed | 2 Mbps |
| UAV’s buffer space | 2 Gb |
| Message size | 500 kb–1 Mb |
| Message time to live | 10 h |
| Source and destination of messages | any UAV |
| No. of route simulations | 1000 |
| Mission Phase | Experimental Mean Flight Time [s] | Standard Deviation |
|---|---|---|
| Take off + Climb (30 m) | 8.24 | 0.193 |
| Cruise_segment (4000 m) | 304 | 0.352 |
| Transfer data | 120 | - |
| Descent + Landing (30 m) | 12.12 | 0.085 |
| Total flight on triangular cell | 1172 | 1.127 |
| Algorithm | Delivery Rate | Latency (h) | ||
|---|---|---|---|---|
| Battery Swapping | Battery Charging | Battery Swapping | Battery Charging | |
| Epidemic | 0.209 | 0.146 | 0.72 | 2.13 |
| Spray and Wait | 0.179 | 0.156 | 0.56 | 1.92 |
| PRoPHET | 0.762 | 0.319 | 0.52 | 2.49 |
| MaxProp | 0.743 | 0.261 | 0.47 | 1.90 |
| MaxDelivery | 0.271 | 0.160 | 0.71 | 1.80 |
| TD-UAV Dijkstra | 0.973 | 0.664 | 0.45 | 1.48 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Udroiu, R.; Deaconu, A.M.; Nanau, C.-Ş. Data Delivery in a Disaster or Quarantined Area Divided into Triangles Using DTN-Based Algorithms for Unmanned Aerial Vehicles. Sensors 2021, 21, 3572. https://doi.org/10.3390/s21113572
Udroiu R, Deaconu AM, Nanau C-Ş. Data Delivery in a Disaster or Quarantined Area Divided into Triangles Using DTN-Based Algorithms for Unmanned Aerial Vehicles. Sensors. 2021; 21(11):3572. https://doi.org/10.3390/s21113572
Chicago/Turabian StyleUdroiu, Razvan, Adrian Marius Deaconu, and Corina-Ştefania Nanau. 2021. "Data Delivery in a Disaster or Quarantined Area Divided into Triangles Using DTN-Based Algorithms for Unmanned Aerial Vehicles" Sensors 21, no. 11: 3572. https://doi.org/10.3390/s21113572
APA StyleUdroiu, R., Deaconu, A. M., & Nanau, C.-Ş. (2021). Data Delivery in a Disaster or Quarantined Area Divided into Triangles Using DTN-Based Algorithms for Unmanned Aerial Vehicles. Sensors, 21(11), 3572. https://doi.org/10.3390/s21113572