
Developing Relative Humidity and Temperature Corrections for Low-Cost Sensors Using Machine Learning

 , ,
, ,
Abstract
1. Introduction
Related Work
2. Materials and Methods
2.1. Sensors and Data Collection
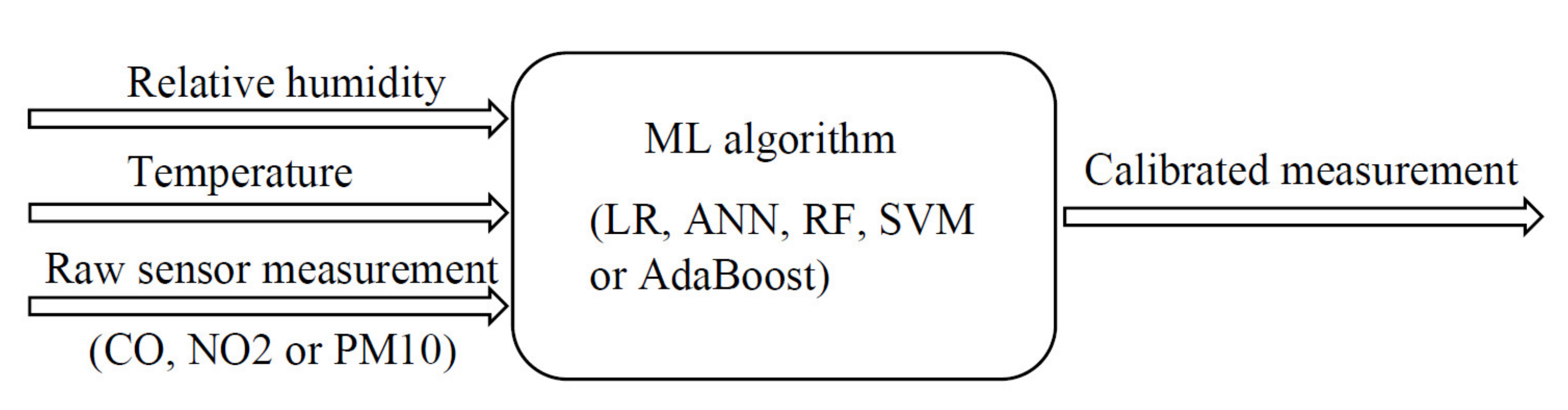
2.2. Calibration Methods
2.3. Machine Learning Algorithms
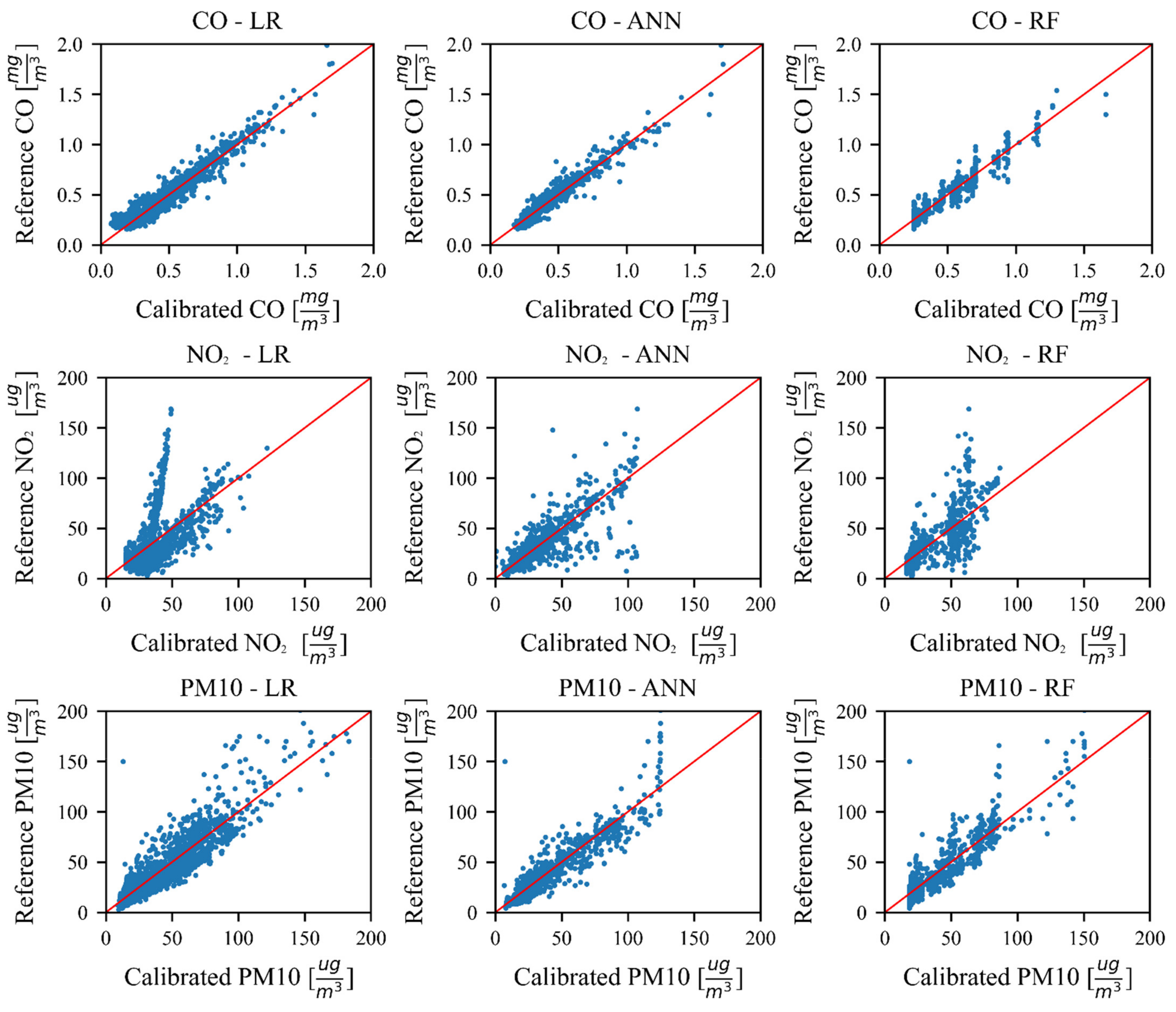
3. Results and Performance Evaluation
4. Discussion
A Hybrid Sensors Network Approach
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- State of World Population 2007. Unleashing the Potential of Urban Growth, United Nations Population Fund (UNFPA), Online Report. 2007. Available online: http://www.unfpa.org/public/publications/pid/408 (accessed on 14 March 2021).
- World Health Organization (WHO). Global Health Observatory (GHO) data. Available online: https://www.who.int/gho/urban_health/situation_trends/urban_population_growth_text/en/ (accessed on 14 March 2021).
- The World’s Cities in 2016. Data Booklet. Available online: https://www.un.org/en/development/desa/population/publications/pdf/urbanization/the_worlds_cities_in_2016_data_booklet.pdf (accessed on 14 March 2021).
- WHO. Ambient Air Pollution: A Global Assessment of Exposure and Burden of Disease; WHO Document Production Services: Geneva, Switzerland, 2016. [Google Scholar]
- Air Quality Guidelines for Europe, 2nd ed; WHO Regional Publications, European Series, No 91. 2000. Available online: www.euro.who.int/document/e71922.pdf (accessed on 14 March 2021).
- Directive 2008/50/EC of the European Parliament and of the Council of 21 May 2008 on Ambient Air Quality and Cleaner Air for Europe OJ L 152, 11.6.2008, p. 1–44. Available online: https://eur-lex.europa.eu/legal-content/en/ALL/?uri=CELEX%3A32008L0050 (accessed on 14 March 2021).
- Directive 2015/1480/EC of the European Parliament and of the Council of 28 August 2015 on Ambient Air Quality and Cleaner air for Europe. O. J. Eur. Union, 2015, O. J. L 226, 29.8.2015, p. 4–11. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=celex:32015L1480 (accessed on 14 March 2021).
- Air Quality Monitoring System. Available online: https://www.horiba.com/uk/process-environmental/products/system-engineering/air-quality-monitoring-system/ (accessed on 21 April 2021).
- ekoNET Air Quality Device. Available online: https://ekonet.solutions/air-monitoring/ (accessed on 14 March 2021).
- Kularatna, N.; Sudantha, B.H. An environmental air pollution monitoring system based on the IEEE 1451 standard for low cost requirements. IEEE Sens. J. 2008, 8, 415–422. [Google Scholar] [CrossRef]
- Drajic, D.; Gligoric, N. Reliable Low-Cost Air Quality Monitoring Using Off-The-Shelf Sensors and Statistical Calibration. Elektronika Elektrotechnika 2020, 26, 32–41. [Google Scholar] [CrossRef]
- CiteairII: Common Information to European Air. Available online: https://www.airqualitynow.eu/download/CITEAIRComparing_Urban_Air_Quality_across_Borders.pdf (accessed on 14 March 2021).
- Zimmerman, N.; Presto, A.A.; Kumar, S.P.N.; Gu, J.; Hauryliuk, A.; Robinson, E.S.; Robinson, A.L.; Subramanian, R. A machine learning calibration model using random forests to improve sensor performance for lower-cost air quality monitoring. Atmosph. Meas. Tech. 2018, 11, 291–313. [Google Scholar] [CrossRef]
- Bigi, A.; Mueller, M.; Grang, S.K.; Ghermandi, G.; Hueglin, C. Performance of NO, NO2 low cost sensors and three calibration approaches within a real world application. Atmosph. Meas. Tech. 2018, 11, 3717–3735. [Google Scholar] [CrossRef]
- De Vito, S.; Esposito, E.; Salvato, M.; Popoola, O.; Formisano, F.; Jones, R.; Di Francia, G. Calibrating chemical multi-sensory devices for real world applications: An in-depth comparison of quantitative machine learning approaches. Sens. Actuat. B Chem. 2018, 255, 1191–1210. [Google Scholar] [CrossRef]
- Johnson, N.E.; Bonczak, B.; Kontokosta, C.E. Using a gradient boosting model to improve the performance of low-cost aerosol monitors in a dense, heterogeneous urban environment. Atmosp. Environ. 2018, 184, 9–16. [Google Scholar] [CrossRef]
- Spinelle, L.; Gerboles, M.; Villani, M.G.; Aleixandre, M.; Bonavitacola, F. Field calibration of a cluster of low-cost available sensors for air quality monitoring. Part A: Ozone and nitrogen dioxide. Sens. Actuat. B Chem. 2015, 215, 249–257. [Google Scholar] [CrossRef]
- Spinelle, L.; Gerboles, M.; Villani, M.G.; Aleixandre, M.; Bonavitacola, F. Field calibration of a cluster of low-cost available sensors for air quality monitoring. Part B: NO, CO and CO2. Sens. Actuat. B Chem. 2017, 238, 706–715. [Google Scholar] [CrossRef]
- Kumar, P.; Morawska, L.; Martani, C.; Biskos, G.; Neophytou, M.; Di Sabatino, S.; Bell, M.; Norford, L.; Britter, L. The rise of low-cost sensing for managing air pollution in cities. Environ. Int. 2015, 75, 199–205. [Google Scholar] [CrossRef]
- Topalovic, D.; Davidovic, M.; Jovanovic, M.; Bartonova, A.; Ristovski, Z.; Jovasevic-Stojanovic, M. In search of an optimal calibration method of low-cost gas sensors for ambient air pollutants: Comparison of linear, multilinear and artificial neural network approaches. Atmosp. Environ. 2019, 213, 640–658. [Google Scholar] [CrossRef]
- Cordero, J.M.; Borge, R.; Narros, A. Using statistical methods to carry out in field calibrations of low cost air quality sensors. Sens. Actuat. B Chem. 2018, 267, 245–254. [Google Scholar] [CrossRef]
- Di Antonio, A.; Popoola, O.A.M.; Ouyang, B.; Saffell, J.; Jones, R.L. Developing a relative humidity correction for low-cost sensors measuring ambient particulate matter. Sensors 2018, 18, 2790. [Google Scholar] [CrossRef]
- Motlagh, N.H.; Lagerspetz, E.; Nurmi, P.; Li, X.; Varjonen, S.; Mineraud, J.; Siekkinen, M.; Rebeiro-Hargrave, A.; Hussein, T.; Petäjä, T.; et al. Toward Massive Scale Air Quality Monitoring. IEEE Commun. Mag. 2020, 58, 54–59. [Google Scholar] [CrossRef]
- Lagerspetz, E.; Hamberg, J.; Li, X.; Flores, H.; Nurmi, P.; Davies, N.; Helal, S. Pervasive Data Science on the Edge. IEEE Perv. Comput. 2019, 18, 40–49. [Google Scholar] [CrossRef]
- Alhasa, K.M.; Mohd Nadzir, M.S.; Olalekan, P.; Latif, M.T.; Yusup, Y.; Iqbal Faruque, M.R.; Ahamad, F.; Aiyub, K.; Md Ali, S.H.; Khan, M.F.; et al. Calibration Model of a Low-Cost Air Quality Sensor Using an Adaptive Neuro-Fuzzy Inference System. Sensors 2018, 18, 4380. [Google Scholar] [CrossRef]
- Jang, J.-S.R. ANFIS: Adaptive network-based fuzzy inference system. IEEE Trans. Syst. Man Cybernet. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- Jayaratne, R.; Liu, X.; Phong, T.K.; Dunbabin, M.; Morawska, L. The influence of humidity on the performance of a low-cost air particle mass sensor and the effect of atmospheric fog. Atmosp. Meas. Tech. 2018, 11, 4883–4890. [Google Scholar] [CrossRef]
- Samad, A.; Obando Nuñez, D.R.; Solis Castillo, G.C.; Laquai, B.; Vogt, U. Effect of Relative Humidity and Air Temperature on the Results Obtained from Low-Cost Gas Sensors for Ambient Air Quality Measurements. Sensors 2020, 20, 5175. [Google Scholar] [CrossRef]
- Karagulian, F.; Barbiere, M.; Kotsev, A.; Spinelle, L.; Gerboles, M.; Lagler, F.; Redon, N.; Crunaire, S.; Borowiak, A. Review of the Performance of Low-Cost Sensors for Air Quality Monitoring. Atmosphere 2019, 10, 506. [Google Scholar] [CrossRef]
- Lin, C.; Gillespie, J.; Schuder, M.D.; Duberstein, W.; Beverland, I.J.; Heal, M.R. Evaluation and calibration of Aeroqual series 500 portable gas sensors for accurate measurement of ambient ozone and nitrogen dioxide. Atmos. Environ. 2015, 100, 111–116. [Google Scholar] [CrossRef]
- Gao, Y.; Dong, W.; Guo, K.; Liu, X.; Chen, Y.; Liu, X.; Bu, J.; Chen, C. Mosaic: A low-cost mobile sensing system for urban air quality monitoring. In Proceedings of the 35th Annual IEEE International Conference on Computer Communications (IEEE INFOCOM 2016), San Francisco, CA, USA, 10–14 April 2016. [Google Scholar]
- Borrego, C.; Ginja, J.; Coutinho, M.; Ribeiro, C.; Karatzas, K.; Sioumis, T.; Katsifarakis, N.; Konstantinidis, K.; De Vito, S.; Esposito, E.; et al. Assessment of air quality microsensors versus reference methods: The EuNetAir Joint Exercise—Part II. Atmos. Environ. 2018, 193, 127–142. [Google Scholar] [CrossRef]
- Esposito, E.; De Vito, S.; Salvato, M.; Bright, V.; Jones, R.L.; Popoola, O. Dynamic neural network architectures for on field stochastic calibration of indicative low cost air quality sensing systems. Sens. Actuat. B Chem. 2016, 231, 701–713. [Google Scholar] [CrossRef]
- Cheng, Y.; Li, X.; Li, Z.; Jiang, S.; Li, Y.; Jia, J.; Jiang, X. AirCloud: A cloud-based air-quality monitoring system for everyone. In Proceedings of the 12th ACM Conference on Embedded Network Sensor Systems (SenSys 14), New York, NY, USA, 3 November 2014; pp. 251–265. [Google Scholar]
- Chen, C.-C.; Kuo, C.-T.; Chen, S.-Y.; Lin, C.-H.; Chue, J.-J.; Hsieh, Y.-J.; Cheng, C.-W.; Wu, C.-M.; Huang, C.-M. Calibration of low-cost particle sensors by using machine-learning method. In Proceedings of the 2018 IEEE Asia Pacific Conference on Circuits and Systems (APCCAS 2018), Chengdu, China, 26–30 October 2018; pp. 111–114. [Google Scholar]
- Wang, W.-C.V.; Lung, S.-C.C.; Liu, C.-H. Application of Machine Learning for the in-Field Correction of a PM2.5 Low-Cost Sensor Network. Sensors 2020, 20, 5002. [Google Scholar] [CrossRef]
- Xiang, Y.; Piedrahita, R.; Dick, R.P.; Hannigan, M.; Lv, Q.; Shang, L. A hybrid sensor system for indoor air quality monitoring. In Proceedings of the IEEE International Conference on Distributed Computing in Sensor Systems (DCoSS 2013), Cambridge, MA, USA, 20–23 May 2013; pp. 96–104. [Google Scholar]
- Johnston, S.J.; Basford, P.J.; Bulot, F.M.J.; Apetroaie-Cristea, M.; Easton, N.H.C.; Davenport, C.; Foster, G.L.; Loxham, M.; Morris, A.K.R.; Cox, S.J. City scale particulate matter monitoring using LoRaWAN based air quality IoT devices. Sensors 2019, 19, 209. [Google Scholar] [CrossRef]
- Schneider, P.; Castell, N.; Vogt, M.; Dauge, F.R.; Lahoz, W.A.; Bartonova, A. Mapping urban air quality in near real-time using observations from low-cost sensors and model information. Environ. Int. 2017, 106, 234–247. [Google Scholar] [CrossRef]
- Penza, M.; Suriano, D.; Pfister, V.; Prato, M.; Cassano, G. Urban Air Quality Monitoring with Networked Low-Cost Sensor-Systems. In Proceedings of the Eurosensors, Paris, France, 3–6 September 2017; p. 573. [Google Scholar]
- Chen, F.-L.; Liu, K.-H. Method for rapid deployment of low-cost sensors for a nationwide project in the Internet of things era: Air quality monitoring in Taiwan. Int. J. Distrib. Sens. Netw. 2020, 16, 550147720951334. [Google Scholar] [CrossRef]
- Popoola, O.A.M.; Carruthers, D.; Lad, C.; Bright, V.B.; Mead, M.I.; Stettler, M.E.J.; Saffell, J.R.; Jones, R.L. Use of networks of low cost air quality sensors to quantify air quality in urban settings. Atmosp. Environ. 2018, 194, 58–70. [Google Scholar] [CrossRef]
- Engelhardt, M.; Bain, L.J. Introduction to Probability and Mathematical Statistics; Duxbury Press: London, UK, 2000; ISBN 978-053-438-020-5. [Google Scholar]
- Jain, A.K.; Mao, J.; Mohiuddin, K.M. Artificial neural networks: A tutorial. Computer 1996, 29, 31–44. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Department of Ecology, State of Washington. Air Monitoring Site Selection and Installation Procedure. Available online: https://fortress.wa.gov/ecy/publications/documents/1602021.pdf (accessed on 14 March 2021).
- Greater London Authority, Guide for Monitoring Air Quality in London. Available online: https://www.london.gov.uk/sites/default/files/air_quality_monitoring_guidance_january_2018.pdf (accessed on 14 March 2021).



{kind=link}
{kind=link}
| Pollutant | Calibration Model | References | Metrics |
|---|---|---|---|
| CO | LR | Drajic [11], Spinelle [17], Spinelle [18], Topalovic [20], Samad [28], Karagulian [29], Lin [30], Borrego [32] | , , RMSE, NRMSE |
| CO | ANN | Spinelle [17], Spinelle [18], Topalovic [20], Motlagh [23], Alhasa [25], Karagulian [29], Borrego [32] | , , RMSE, NRMSE |
| CO | RF | Karagulian [29], Borrego [32] | , RMSE |
| NO2 | LR | Drajic [11], Spinelle [17], Spinelle [18], Cordero [21], Karagulian [29], Borrego [32] | , RMSE |
| NO2 | ANN | Spinelle [17], Spinelle [18]. Motlagh [23], Alhasa [25], Samad [28], Karagulian [29], Borrego [32], Espositi [33] | , RMSE |
| NO2 | RF | Cordero [21], Karagulian [29], Borrego [32] | , RMSE |
| PM10 | LR | Drajic [11], Jayaratne [27], Karagulian [29], Borrego [32] | , RMSE |
| PM10 | ANN | Motlagh [23], Karagulian [29], Borrego [32] | , RMSE |
| PM10 | RF | Karagulian [29], Borrego [32] | , RMSE |
| PM2.5 | LR | Di Antonio [22], Chen [35] | , RMSE |
| PM2.5 | ANN | Gao [31], Chang [34], Chen [35] | , RMSE |
| PM2.5 | RF | Wang [36] | , RMSE |
| Pollutant | Manufacturer | Model | Range | Unit |
|---|---|---|---|---|
| CO | Alphasense | CO-B4 | 0–50 ppm | ppm or mg/m3 |
| NO2 | Alphasense | NO2-B43F | 0–20 ppm | ppb or μg/m3 |
| PM10 | Plantower | PMS7003 | 0~1000 μg/m3 | μg/m3 |
| Parameter | February | April | August | October |
|---|---|---|---|---|
| Average T [°C] 2019 Average T [°C] 2020 | 6.8 7.7 | 9.2 11.7 | 25.1 23.7 | 16.3 18.6 |
| Median T [°C] 2019 Median T [°C] 2020 | 8.1 5.9 | 11.1 9.7 | 23.2 24.9 | 17.9 16.1 |
| Std T [°C] 2019 Std T [°C] 2020 | 5.5 3.9 | 4.9 5.7 | 4.6 4.5 | 4.5 3.9 |
| Average RH [%] 2019 Average RH [%] 2020 | 74.1 71.3 | 54.3 48.9 | 59.2 60.1 | 64.9 62.1 |
| Median RH [%] 2019 Median RH [%] 2020 | 70.9 72.7 | 51.1 52.1 | 61.3 59.5 | 61.8 64.1 |
| Std RH [%] 2019 Std RH [%] 2020 | 16.5 17.4 | 16.1 17.1 | 19.3 15.1 | 16.4 15.8 |
| Pollutant | ||||
|---|---|---|---|---|
| February | April | August | October | |
| CO | 0.933 | 0.949 | 0.861 | 0.946 |
| NO2 | 0.784 | 0.846 | 0.671 | 0.828 |
| PM10 | 0.716 | 0.849 | 0.664 | 0.786 |
| Algorithm | CO | NO2 | PM10 | |||
|---|---|---|---|---|---|---|
| RMSE | RMSE | RMSE | ||||
| Linear regression | 0.935 | 0.066 | 0.737 | 13.412 | 0.837 | 12.551 |
| Neural network 1 (2 HL 1) | 0.941 | 0.065 | 0.869 | 9.450 | 0.839 | 12.583 |
| Neural network 2 (3 HL) | 0.943 | 0.063 | 0.872 | 9.344 | 0.850 | 12.124 |
| AdaBoost | 0.924 | 0.074 | 0.843 | 10.360 | 0.846 | 14.560 |
| Random forest | 0.945 | 0.060 | 0.894 | 8.540 | 0.872 | 11.123 |
| SVM | 0.933 | 0.070 | NC 2 | NC | 0.835 | 12.748 |
| Pollutant, Algorithm (Input Features) | RMSE | NRMSE | |||
|---|---|---|---|---|---|
| Calibration | Test | Calibration | Test | Test | |
| CO, LR (raw) | 0.931 | 0.068 | 0.264 | ||
| CO, ANN (raw) | 0.927 | 0.927 | 0.070 | 0.070 | |
| CO, ANN (raw, RH, T) | 0.945 | 0.943 | 0.061 | 0.063 | 0.244 |
| CO, RF (raw) | 0.988 | 0.915 | 0.028 | 0.075 | |
| CO, RF (raw, RH, T) | 0.994 | 0.945 | 0.022 | 0.060 | 0.233 |
| NO2, LR (raw) | 0.793 | 11.980 | 0.455 | ||
| NO2, ANN (raw) | 0.809 | 0.797 | 11.610 | 11.913 | |
| NO2, ANN (raw, RH, T) | 0.908 | 0.872 | 8.040 | 9.340 | 0.348 |
| NO2, RF (raw) | 0.967 | 0.762 | 4.817 | 12.860 | |
| NO2, RF (raw, RH, T) | 0.986 | 0.894 | 3.162 | 8.543 | 0.325 |
| PM10, LR (raw) | 0.794 | 14.112 | 0.453 | ||
| PM10, ANN (raw) | 0.782 | 0.774 | 14.687 | 14.969 | |
| PM10, ANN (raw, RH, T) | 0.910 | 0.850 | 9.482 | 12.121 | 0.389 |
| PM10, RF (raw) | 0.959 | 0.709 | 6.374 | 17.198 | |
| PM10, RF (raw, RH, T) | 0.982 | 0.872 | 4.140 | 11.124 | 0.357 |
| Pollutant, Algorithm (Input Features) | RMSE | |||
|---|---|---|---|---|
| Calibration | Test | Calibration | Test | |
| CO, LR (raw) | 0.933 | 0.053 | ||
| CO, ANN (raw, RH, T) | 0.980 | 0.968 | 0.031 | 0.038 |
| CO, RF (raw, RH, T) | 0.993 | 0.934 | 0.017 | 0.052 |
| NO2, LR (raw) | 0.784 | 8.940 | ||
| NO2, ANN (raw, RH, T) | 0.857 | 0.832 | 7.986 | 8.625 |
| NO2, RF (raw, RH, T) | 0.985 | 0.904 | 2.360 | 5.976 |
| PM10, LR (raw) | 0.716 | 12.012 | ||
| PM10, ANN (raw, RH, T) | 0.780 | 0.737 | 11.567 | 12.549 |
| PM10, RF (raw, RH, T) | 0.962 | 0.767 | 4.436 | 10.221 |
| Pollutant, Algorithm (Input Features) | RMSE | |||
|---|---|---|---|---|
| Calibration | Test | Calibration | Test | |
| CO, LR (raw) | 0.949 | 0.054 | ||
| CO, ANN (raw, RH, T) | 0.982 | 0.974 | 0.032 | 0.039 |
| CO, RF (raw, RH, T) | 0.996 | 0.970 | 0.015 | 0.042 |
| NO2, LR (raw) | 0.846 | 9.278 | ||
| NO2, ANN (raw, RH, T) | 0.889 | 0.866 | 9.463 | 10.001 |
| NO2, RF (raw, RH, T) | 0.993 | 0.943 | 2.008 | 5.695 |
| PM10, LR (raw) | 0.849 | 8.070 | ||
| PM10, ANN (raw, RH, T) | 0.888 | 0.867 | 8.111 | 8.680 |
| PM10, RF (raw, RH, T) | 0.984 | 0.891 | 2.806 | 7.204 |
| Pollutant, Algorithm (Input Features) | RMSE | |||
|---|---|---|---|---|
| Calibration | Test | Calibration | Test | |
| CO, LR (raw) | 0.861 | 0.048 | ||
| CO, ANN (raw, RH, T) | 0.894 | 0.885 | 0.039 | 0.047 |
| CO, RF (raw, RH, T) | 0.978 | 0.927 | 0.019 | 0.033 |
| NO2, LR (raw) | 0.671 | 11.286 | ||
| NO2, ANN (raw, RH, T) | 0.940 | 0.767 | 4.590 | 10.130 |
| NO2, RF (raw, RH, T) | 0.961 | 0.817 | 3.620 | 9.460 |
| PM10, LR (raw) | 0.664 | 8.740 | ||
| PM10, ANN (raw, RH, T) | 0.813 | 0.678 | 6.985 | 8.664 |
| PM10, RF (raw, RH, T) | 0.967 | 0.731 | 2.882 | 7.935 |
| Pollutant, Algorithm (Input Features) | RMSE | |||
|---|---|---|---|---|
| Calibration | Test | Calibration | Test | |
| CO, LR (raw) | 0.946 | 0.068 | ||
| CO, ANN (raw, RH, T) | 0.969 | 0.968 | 0.052 | 0.062 |
| CO, RF (raw, RH, T) | 0.991 | 0.949 | 0.028 | 0.067 |
| NO2, LR (raw) | 0.828 | 13.761 | ||
| NO2, ANN (raw, RH, T) | 0.893 | 0.875 | 10.880 | 11.820 |
| NO2, RF (raw, RH, T) | 0.988 | 0.914 | 3.698 | 9.786 |
| PM10, LR (raw) | 0.786 | 16.492 | ||
| PM10, ANN (raw, RH, T) | 0.910 | 0.819 | 4.550 | 9.570 |
| PM10, RF (raw, RH, T) | 0.977 | 0.824 | 5.623 | 8.940 |
| Pollutant (Input Set) | RMSE | |
|---|---|---|
| CO, LR (raw) | 0.952 | 0.091 |
| CO, RF (2019) | 0.953 | 0.077 |
| CO, RF (2019 + 2020) | 0.957 | 0.065 |
| NO2, LR (raw) | 0.830 | 18.564 |
| NO2, RF (2019) | 0.853 | 15.667 |
| NO2, RF (2019 + 2020) | 0.856 | 10.564 |
| PM10, LR (raw) | 0.833 | 28.356 |
| PM10, RF (2019) | 0.844 | 12.071 |
| PM10, RF (2019 + 2020) | 0.863 | 11.046 |
| Pollutant (Calibration Set) | RMSE | |
|---|---|---|
| CO, LR (raw) | 0.954 | 0.079 |
| CO, RF (2019) | 0.955 | 0.064 |
| CO, RF (2019 + 2020) | 0.956 | 0.051 |
| NO2, LR (raw) | 0.569 | 23.625 |
| NO2, RF (2019) | 0.676 | 21.973 |
| NO2, RF (2019 + 2020) | 0.689 | 15.316 |
| PM10, LR (raw) | 0.786 | 71.302 |
| PM10, RF (2019) | 0.732 | 49.949 |
| PM10, RF (2019 + 2020) | 0.739 | 48.516 |
| Pollutant (Calibration Set) | RMSE | |
|---|---|---|
| CO, LR (raw) | 0.764 | 0.074 |
| CO, RF (2019) | 0.787 | 0.054 |
| CO, RF (2019 + 2020) | 0.801 | 0.035 |
| NO2, LR (raw) | 0.476 | 24.134 |
| NO2, RF (2019) | 0.440 | 17.834 |
| NO2, RF (2019 + 2020) | 0.477 | 7.917 |
| PM10, LR (raw) | 0.408 | 17.935 |
| PM10, RF (2019) | 0.303 | 8.872 |
| PM10, RF (2019 + 2020) | 0.249 | 8.201 |
| Pollutant (Calibration Set) | RMSE | |
|---|---|---|
| CO, LR (raw) | 0.901 | 0.081 |
| CO, RF (2019) | 0.903 | 0.069 |
| CO, RF (2019 + 2020) | 0.904 | 0.059 |
| NO2, LR (raw) | 0.748 | 15.432 |
| NO2, RF (2019) | 0.779 | 10.993 |
| NO2, RF (2019 + 2020) | 0.785 | 10.366 |
| PM10, LR (raw) | 0.213 | 30.217 |
| PM10, RF (2019) | 0.134 | 26.418 |
| PM10, RF (2019 + 2020) | 0.219 | 34.650 |
| Pollutant | ||||
|---|---|---|---|---|
| February | April | August | October | |
| CO | 0.035 | 0.025 | 0.066 | 0.022 |
| NO2 | 0.120 | 0.097 | 0.146 | 0.086 |
| PM10 | 0.051 | 0.042 | 0.067 | 0.038 |
| Pollutant | |
|---|---|
| CO | 0.014 |
| NO2 | 0.101 |
| PM10 | 0.078 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vajs, I.; Drajic, D.; Gligoric, N.; Radovanovic, I.; Popovic, I. Developing Relative Humidity and Temperature Corrections for Low-Cost Sensors Using Machine Learning. Sensors 2021, 21, 3338. https://doi.org/10.3390/s21103338
Vajs I, Drajic D, Gligoric N, Radovanovic I, Popovic I. Developing Relative Humidity and Temperature Corrections for Low-Cost Sensors Using Machine Learning. Sensors. 2021; 21(10):3338. https://doi.org/10.3390/s21103338
Chicago/Turabian StyleVajs, Ivan, Dejan Drajic, Nenad Gligoric, Ilija Radovanovic, and Ivan Popovic. 2021. "Developing Relative Humidity and Temperature Corrections for Low-Cost Sensors Using Machine Learning" Sensors 21, no. 10: 3338. https://doi.org/10.3390/s21103338
APA StyleVajs, I., Drajic, D., Gligoric, N., Radovanovic, I., & Popovic, I. (2021). Developing Relative Humidity and Temperature Corrections for Low-Cost Sensors Using Machine Learning. Sensors, 21(10), 3338. https://doi.org/10.3390/s21103338