Precise Loran-C Signal Acquisition Based on Envelope Delay Correlation Method

Abstract
1. Introduction
2. Materials and Methods
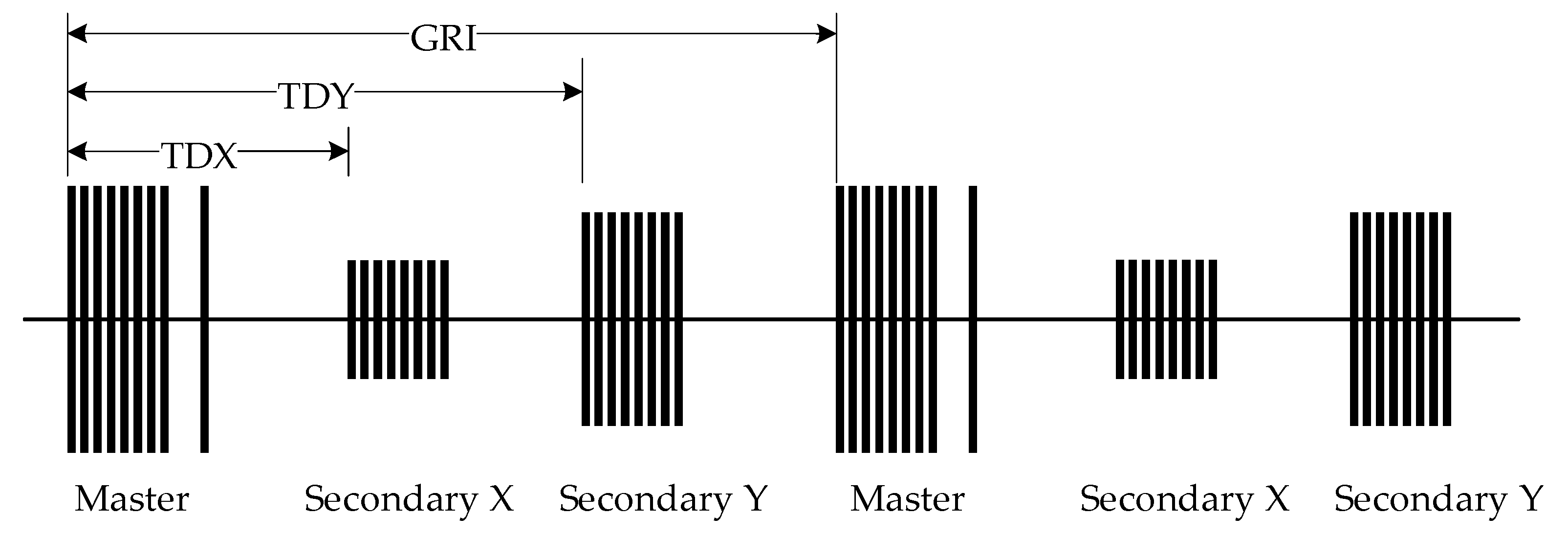
2.1. Loran-C Signal Format
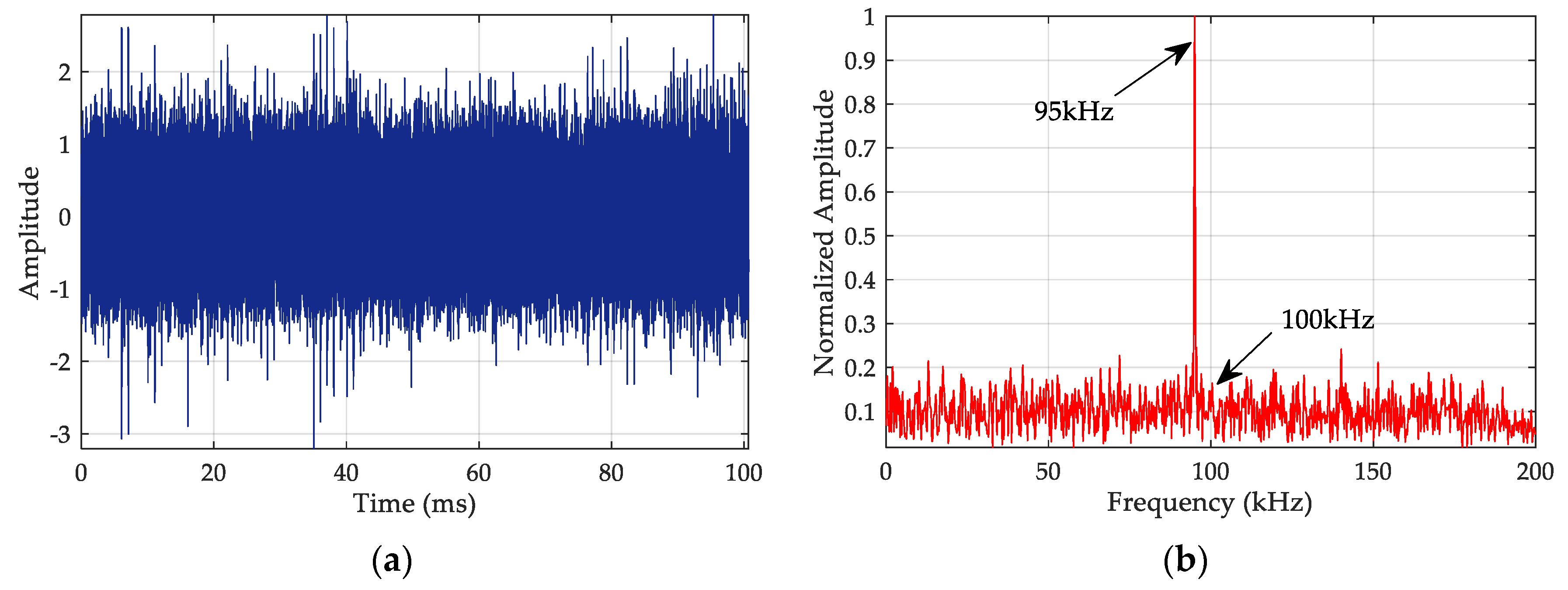
2.2. Loran-C Interference Sources
2.3. Loran-C Acquisition Method
2.3.1. Process of the Acquisition Method
2.3.2. Envelope Delay Correlation (EDC)
2.3.3. Linear Digital Averaging (LDA)
2.3.4. Threshold and Detection
3. Results
3.1. Validation Method
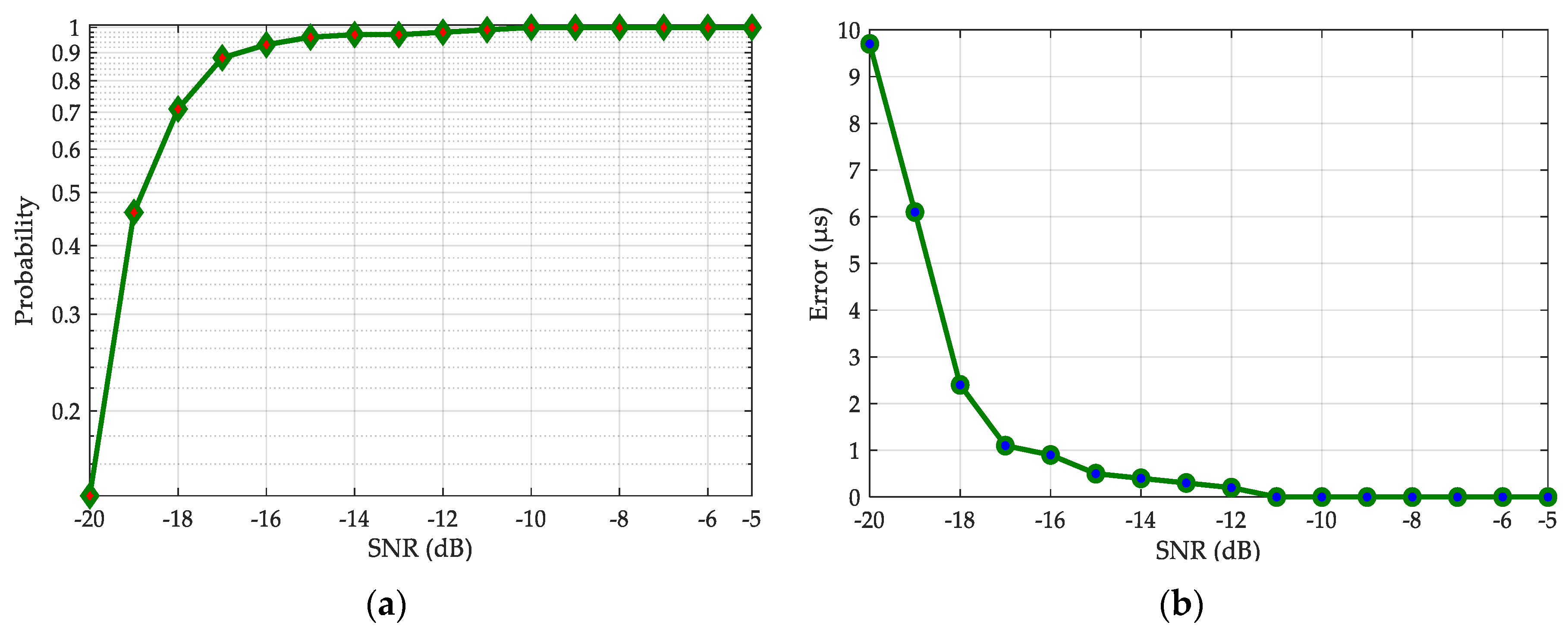
3.2. Anti-noise Performance
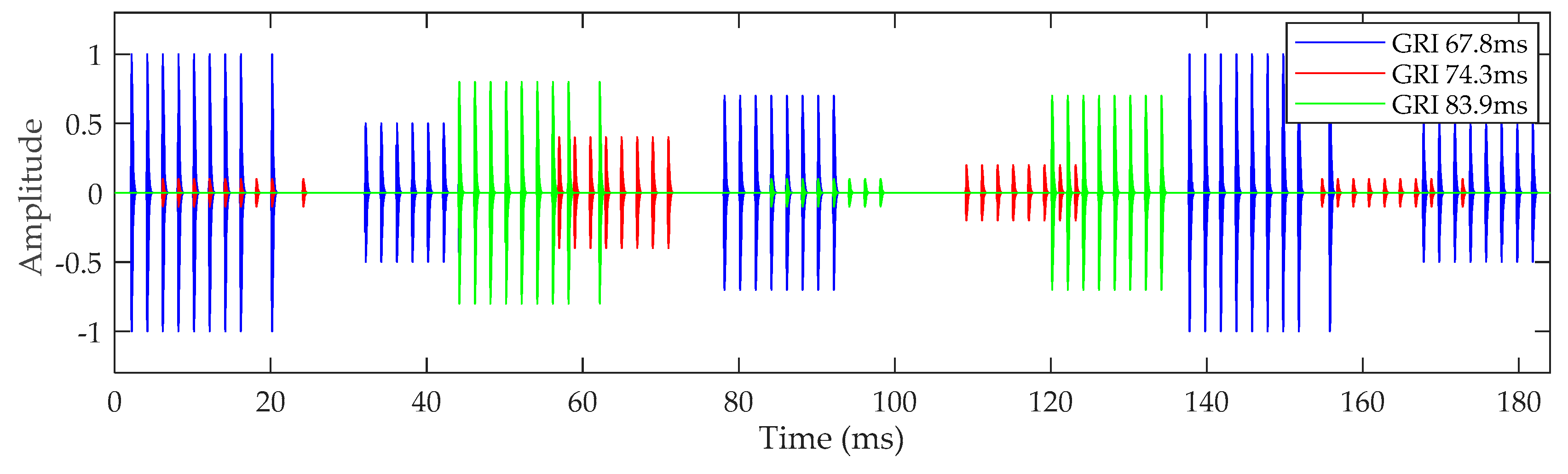
3.3. Cross-rate Interference Effect
3.4. Experimental Verification
4. Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Qiu, D.; Boneh, D.; Lo, S.; Enge, P. Reliable Location-Based Services from Radio Navigation Systems. Sensors 2010, 10, 11369–11385. [Google Scholar] [CrossRef]
- Griffioen, J.W.; Oonincx, P.J. Suitability of Low-Frequency Navigation Systems for Artillery Positioning in a GNSS Denied Environment. J. Navig. 2013, 66, 35–48. [Google Scholar] [CrossRef]
- Strategy for the Department of Defense Positioning, Navigation and Timing (PNT) enterprise—Ensuring a US Military PNT Advantage. Available online: https://rntfnd.org/wp-content/uploads/DoD-PNT-Strategy.pdf (accessed on 12 February 2020).
- Li, Y.; Hua, Y.; Yan, B.R.; Guo, W. Experimental Study on a Modified Method for Propagation Delay of Long Wave Signal. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 1719. [Google Scholar] [CrossRef]
- Wang, X.Y.; Zhang, S.F.; Sun, X.W. The Additional Secondary Phase Correction System for AIS Signals. Sensors 2017, 17, 736. [Google Scholar] [CrossRef] [PubMed]
- Williams, P.; Basker, S.; Ward, N. e-Navigation and the case for eLoran. J. Navig. 2008, 61, 473–475. [Google Scholar] [CrossRef]
- Kim, H.; Lee, J.; Oh, S.H.; So, H.; Hwang, D.H. Multi-Radio Integrated Navigation System M&S Software Design for GNSS Backup under Navigation Warfare. Electronics 2019, 8, 188. [Google Scholar] [CrossRef]
- Johnson, G.; Wiggins, M.; Swaszek, P.F.; Hartshorn, L.; Hartnett, R. Possible optimizations for the US Loran system. In Proceedings of the 2006 IEEE/ION Position, Location and Navigation Symposium, Coronado, CA, USA, 24–27 April 2006; pp. 695–701. [Google Scholar] [CrossRef]
- Offermans, G.; Bartlett, S.; Schue, C. Providing a Resilient Timing and UTC Service Using eLoran in the United States. Navig. J. Inst. Navig. 2017, 64, 339–343. [Google Scholar] [CrossRef]
- S.140-Frank LoBiondo Coast Guard Authorization Act of 2018. Available online: https://www.congress.gov/bill/115th-congress/senate-bill/140 (accessed on 15 February 2020).
- Hu, A.P.; Gong, T. Research Status and Progress on the Enhance Loran-C Navigation Technology. GNSS World Chin. 2016, 1, 74–77. [Google Scholar]
- Joon, H.R.; JiWon, S. eLoran Signal Strength and Atmospheric Noise Simulation over Korea. J. Position. Navig. Timing 2013, 2, 101–108. [Google Scholar] [CrossRef]
- Gao, Y.Y.; Hua, Y.; Li, S.F.; Yang, C.Z. Acquisition method of Loran-C signal based on matched filter. In Proceedings of the 2015 IEEE International Conference on Signal Processing, Communications and Computing, Ningbo, China, 19–22 September 2015; pp. 541–545. [Google Scholar] [CrossRef]
- Fisher, A.J. Loran-C cycle identification in hard-limiting receivers. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 290–291. [Google Scholar] [CrossRef]
- Vanderwal, P.W.; Vanwilligen, D. Hard Limiting and Sequential Detection Applied to Loran-C. IEEE Trans. Aerosp. Electron. Syst. 1978, 14, 649–658. [Google Scholar] [CrossRef]
- Li, S.F.; Wang, Y.L.; Hua, Y.; Yuan, J.B. Loran-C Signal Fast Acquisition Method and Its performance Analysis. J. Electron. Inf. Technol. 2013, 35, 2175–2179. [Google Scholar] [CrossRef]
- Zhu, Y.B.; Cao, K.J.; Li, B. Study on Auto-Search Algorithm Based on Subsection Correlation for Loran-C. Appl. Mech. Mater. 2012, 241–244, 1751–1755. [Google Scholar] [CrossRef]
- U.S. Coast Guard and the U.S. Coast Guard Auxiliary. Loran-C User Handbook. Available online: https://www.loran.org/otherarchives/-1992%20-Loran-C%20User%20Handbook%20-%20USCG.pdf (accessed on 30 January 2020).
- Lo, S.C.; Peterson, B.B.; Enge, P.K. Loran data modulation: A primer. IEEE Aerosp. Electron. Syst. 2007, 22, 31–38. [Google Scholar] [CrossRef]
- Nieuwland, A.K. GRI Ranking Based on Cross-Rate Interference in Loran-C. J. Navig. 1995, 48, 136–140. [Google Scholar] [CrossRef]
- Safar, J. Analysis, Modelling and Mitigation of Cross-Rate Interference in Enhanced Loran. Ph.D. Thesis, Czech Technical University, Prague, Czech Republic, 2014. [Google Scholar]
- Liatos, P.; Hussein, A.M. Characterization of 100-kHz noise in the lightning current derivative signals measured at the CN tower. IEEE Trans. Electromagn. Compat. 2005, 47, 986–997. [Google Scholar] [CrossRef]
- Manish, L.; Frank, G.; Curtis, C.; David, D.D. Characterization of Atmospheric Noise in the LORAN-C Band. In Proceedings of the International Loran Association (ILA)—32nd Annual Convention and Technical Symposium, Boulder, CO, USA, 3–7 November 2003; pp. 1–5. [Google Scholar]
- Safar, J.; Vejrazka, F.; Williams, P. Accuracy Performance of eLoran Receivers under Cross-Rate Interference Conditions. Annu. Navig. 2012, 19, 133–137. [Google Scholar] [CrossRef][Green Version]
- Bayat, M.; Madani, M.H. Analysis of Cross-Rate Interference Cancelation by Use of a Novel Phase Code Interval in Loran Navigation System. Navig. J. Inst. Navig. 2017, 64, 365–376. [Google Scholar] [CrossRef]
- Safar, J.; Paul, W.; Sally, B.; Frantisek, V. Cross-Rate Interference and Implications for Core eLoran Service Provision. In Proceedings of the International Loran Association (ILA)—38nd Annual Convention and Technical Symposium, Portland, ME, USA, 13–15 October 2009; pp. 1–10. [Google Scholar]
- Kong, S.H. High Sensitivity and Fast Acquisition Signal Processing Techniques for GNSS Receivers from fundamentals to state-of-the-art GNSS acquisition technologies. IEEE Signal Process. Mag. 2017, 34, 59–63. [Google Scholar] [CrossRef]
- Geiger, B.C.; Vogel, C.; Soudan, M. Comparison Between Ratio Detection and Threshold Comparison for GNSS Acquisition. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 1172–1179. [Google Scholar] [CrossRef]
- Hinedi, S.; Statman, J. Digital accumulators in phase and frequency tracking loops. IEEE Trans. Aerosp. Electron. Syst. 1990, 26, 170–173. [Google Scholar] [CrossRef]
- Thacker, T.; Boroyevich, D.; Burgos, R.; Wang, F. Phase-Locked Loop Noise Reduction via Phase Detector Implementation for Signal-Phase Systems. IEEE Trans. Ind. Electron. 2011, 58, 2483. [Google Scholar] [CrossRef]
- Yang, M.H.; Wu, H.; Wang, Q.Q.; Zhao, Y.X.; Liu, Z.Y. A BeiDou Signal Acquisition Approach Using Variable Length Data Accumulation Based on Signal Delay and Multiplication. Sensors 2020, 20, 1309. [Google Scholar] [CrossRef] [PubMed]
- Richard, G.L. Understanding Digital Signal Processing, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2004; pp. 411–416. ISBN 0-13-108989-7. [Google Scholar]
- Guo, C.L.; Gao, L.; Yu, L.J. A Pulse Detection Method Based on Judgment Threshold Automatic Recommendation. Fire Control & Command Control 2019, 44, 72. [Google Scholar] [CrossRef]
- Minimum Performance Standards for Marine eLORAN Receiving Equipment. Radio Technical Commission for Maritime Services. Available online: https://rtcm.myshopify.com/collections/maritime-navigation-equipment-standards/products/copy-of-differential-gnss-package-both-of-the-current-standards-10402-3-and-10403-3 (accessed on 11 February 2020).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ground | Master | Secondary |
|---|---|---|
| A | + + − − + − + − + | + + + + + − − + |
| B | + − − + + + + + − | + − + − + + − − |
| Test | Coordinate | Great Circle Distance (km) | Electric Field Strength (dBμV/m) |
|---|---|---|---|
| 1 | 325.4 | 62.9 | |
| 2 | 695.1 | 59.5 | |
| 3 | 915.5 | 51.9 | |
| 4 | 1248.0 | 48.1 | |
| 5 | 1441.3 | 41.5 | |
| 6 | 71.2 | 60.4 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, W.; Zhao, K.; Li, S.; Wang, X.; Hua, Y. Precise Loran-C Signal Acquisition Based on Envelope Delay Correlation Method. Sensors 2020, 20, 2329. https://doi.org/10.3390/s20082329
Yan W, Zhao K, Li S, Wang X, Hua Y. Precise Loran-C Signal Acquisition Based on Envelope Delay Correlation Method. Sensors. 2020; 20(8):2329. https://doi.org/10.3390/s20082329
Chicago/Turabian StyleYan, Wenhe, Kunjuan Zhao, Shifeng Li, Xinghui Wang, and Yu Hua. 2020. "Precise Loran-C Signal Acquisition Based on Envelope Delay Correlation Method" Sensors 20, no. 8: 2329. https://doi.org/10.3390/s20082329
APA StyleYan, W., Zhao, K., Li, S., Wang, X., & Hua, Y. (2020). Precise Loran-C Signal Acquisition Based on Envelope Delay Correlation Method. Sensors, 20(8), 2329. https://doi.org/10.3390/s20082329