Deep Learning Based Switching Filter for Impulsive Noise Removal in Color Images


Abstract
1. Introduction
- We introduce a CNN architecture for impulse detection in noisy images,
- We propose a switching filter that applies deep learning for the localization of corrupted pixels and adaptive mean technique for their replacement,
- We analyze the impact of some network’s parameters on impulse detection accuracy,
- We also investigate the influence of impulse detection errors on the final restoration efficiency,
- We show that the proposed method is superior to the state-of-the-art denoising algorithms,
- We share the source code of the proposed approach at http://github.com/k-radlak/IDCNN.
2. Proposed Switching Filter Design
2.1. Impulsive Noise Detection Using CNN
2.2. Detected Noisy Pixels Replacement
- Select initial window of size centered at the detected noisy pixel and calculate the number of uncorrupted pixels. If all pixels are corrupted, then go to step 2, otherwise go to step 4.
- Increase the size of W by 2.
- Calculate the number of uncorrupted pixels in W and if all pixels are corrupted, then go to step 2, otherwise go to step 4.
- Replace the processed pixel by the average of clean pixels inside W.
2.3. Network Training and Ablation Study
- TP are pixels that were correctly recognized as impulses,
- TN are pixels that were correctly recognized as clean,
- FP are pixels that were incorrectly classified as noisy,
- FN are pixels that were incorrectly classified as uncorrupted.
3. Comparison with the State-of-the-Art Denoising Methods
- Adaptive Weighted Quaternion Color Distance (AWQD) [64],
- DnCNN trained on impulsive noise model [49],
- Fast Averaging Peer Group Filter (FAPGF) [36],
- Fast Adaptive Switching Trimmed Arithmetic Mean Filter (FASTAMF) [32],
- Fast Fuzzy Noise Reduction Filter (FFNRF) [29],
- Fuzzy Rank-Ordered Differences Filter (FRF) [65],
- Fuzzy Weighted Non-Local Means (FWNLM) [66],
- Impulse Noise Reduction Filter (INRF) [67],
- TV-based restoration method with TV-norm data fidelity (L0TV) [68],
- Patch-based Approach for the Restoration of Images affected by Gaussian and Impulse noise (PARIGI) [69],
- Peer Group Filter (PGF) [35],
- Quaternion-Based Switching Filter (QBSF) [70],
- Two-stage Quaternion Switching VMF (TSQSVF) [71],
- Blind Denoising CNN (BDCNN) [72],
- Pixel-shuffle Down-sampling (PD) [73].
3.1. Evaluation Using Objective Quality Measures
- In all cases, the proposed filter outperforms the state-of-the-art techniques and the IDCNNG, trained on GoogleV4 dataset, provided the best results for every image and quality measure.
- The AWQD and FASTAMF filters can be distinguished as those that appear very often among the five best results (depicted in green color).
- Other techniques provide noticeably good results in a rather random manner, thus those may be efficient for certain images, noise ratios or applied quality measure.
3.2. Visual Assessment
3.3. The Influence of Impulse Detection Imperfections
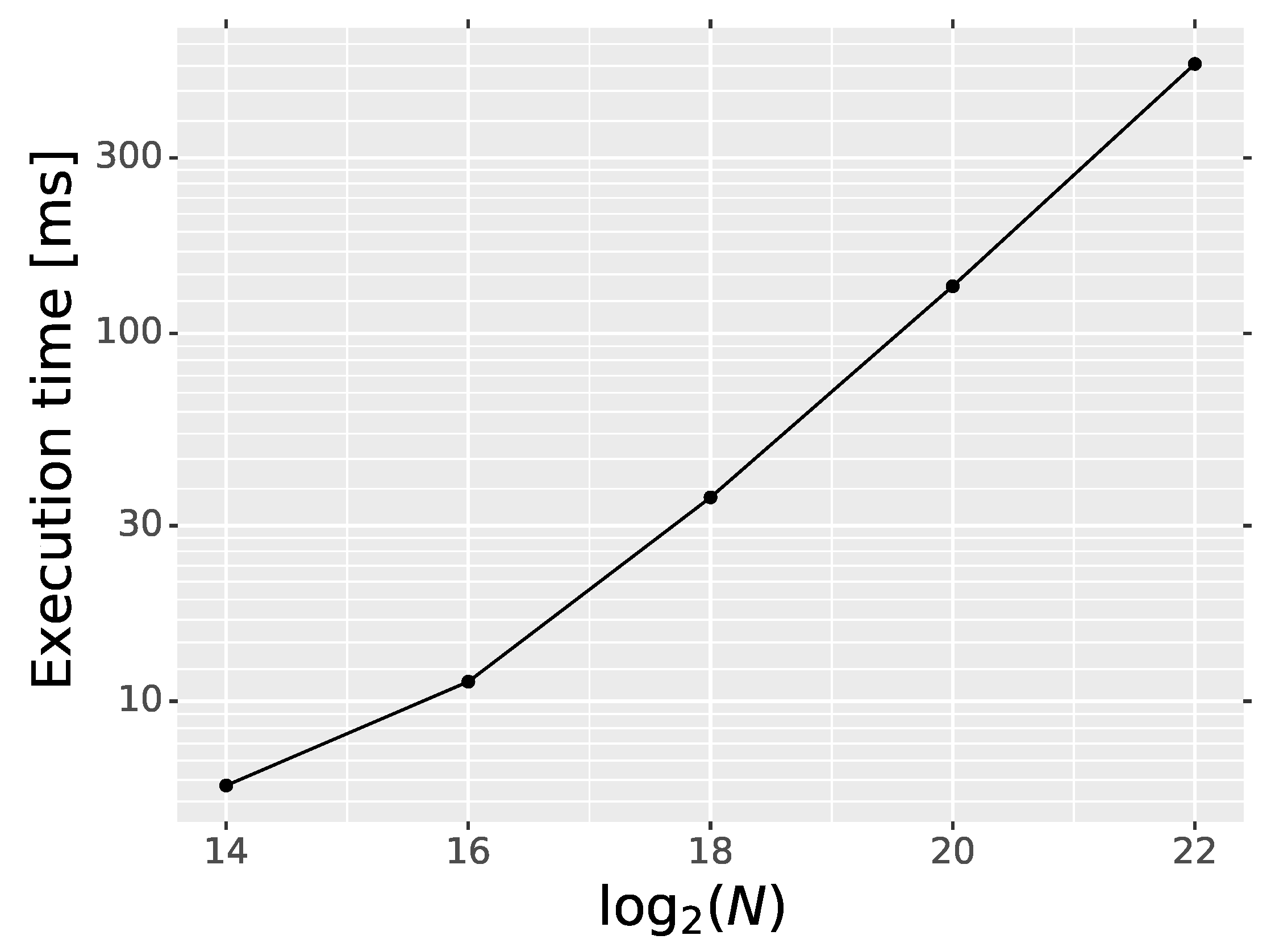
3.4. Computational Complexity
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Arnal, J.; Súcar, L.B. Hybrid Filter Based on Fuzzy Techniques for Mixed Noise Reduction in Color Images. Appl. Sci. 2019, 10, 243. [Google Scholar] [CrossRef]
- Sen, A.P.; Rout, N.K. Removal of High-Density Impulsive Noise in Giemsa Stained Blood Smear Image Using Probabilistic Decision Based Average Trimmed Filter. In Smart Healthcare Analytics in IoT Enabled Environment; Springer International Publishing: Berlin/Heidelberg, Germany, 2020; pp. 127–141. [Google Scholar]
- Boncelet, C. Image noise models. In Handbook of Image and Video Processing; Bovik, A., Ed.; Academic Press: Cambridge, MA, USA, 2005; pp. 397–410. [Google Scholar]
- Faraji, H.; MacLean, W. CCD noise removal in digital images. IEEE Trans. Image Process. 2006, 15, 2676–2685. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Szeliski, R.; Bing Kang, S.; Zitnick, C.L.; Freeman, W.T. Automatic Estimation and Removal of Noise from a Single Image. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 299–314. [Google Scholar] [CrossRef] [PubMed]
- Smolka, B.; Malik, K.; Malik, D. Adaptive rank weighted switching filter for impulsive noise removal in color images. J. Real-Time Image Process. 2012, 10, 289–311. [Google Scholar] [CrossRef]
- Malinski, L.; Smolka, B. Self-tuning fast adaptive algorithm for impulsive noise suppression in color images. J. Real-Time Image Process. 2019. [Google Scholar] [CrossRef]
- Plataniotis, K.N.; Venetsanopoulos, A.N. Color Image Filtering. In Color Image Processing and Applications; Digital Signal Processing; Springer: Berlin/Heidelberg, Germnay, 2000; pp. 51–105. [Google Scholar]
- Smolka, B.; Plataniotis, K.; Venetsanopoulos, A. Chapter Nonlinear Techniques for Color Image Processing. In Nonlinear Signal and Image Processing: Theory, Methods, and Applications; CRC Press: London, UK, 2004; pp. 445–505. [Google Scholar]
- Phu, M.Q.; Tischer, P.; Wu, H.R. Statistical Analysis of Impulse Noise Model for Color Image Restoration. In Proceedings of the 6th IEEE/ACIS International Conference on Computer and Information Science, Melbourne, Australia, 11–13 July 2007; pp. 425–431. [Google Scholar]
- Lukac, R.; Smolka, B.; Plataniotis, K.N.; Venetsanopoulos, A.N. Entropy Vector Median Filter. In Pattern Recognition and Image Analysis; Springer: Berlin/Heidelberg, Germany, 2003; pp. 1117–1125. [Google Scholar]
- Lukac, R.; Smolka, B.; Martin, K.; Plataniotis, K.; Venetsanopoulos, A. Vector filtering for color imaging. IEEE Signal Process. Mag. 2005, 22, 74–86. [Google Scholar] [CrossRef]
- Lukac, R.; Plataniotis, K. A Taxonomy of Color Image Filtering and Enhancement Solutions. In Advances in Imaging and Electron Physics; Elsevier: Amsterdam, The Netherlands, 2006; Volume 140, pp. 187–264. [Google Scholar]
- Morillas, S.; Gregori, V.; Sapena, A. Adaptive marginal median filter for colour images. Sensors 2011, 11, 3205–3213. [Google Scholar] [CrossRef]
- Astola, J.; Haavisto, P.; Neuvo, Y. Vector median filters. Proc. IEEE 1990, 78, 678–689. [Google Scholar] [CrossRef]
- Lukac, R.; Smolka, B.; Plataniotis, K.; Venetsanopoulos, A. Vector sigma filters for noise detection and removal in color images. J. Vis. Commun. Image Represent. 2006, 17, 1–26. [Google Scholar] [CrossRef]
- Lukac, R. Adaptive vector median filtering. Pattern Recognit. Lett. 2003, 24, 1889–1899. [Google Scholar] [CrossRef]
- Celebi, M.E.; Kingravi, H.A.; Aslandogan, Y.A. Nonlinear vector filtering for impulsive noise removal from color images. J. Electron. Imaging 2007, 16, 033008. [Google Scholar] [CrossRef]
- Morillas, S.; Gregori, V. Robustifying vector median filter. Sensors 2011, 11, 8115–8126. [Google Scholar] [CrossRef] [PubMed]
- Panetta, K.; Bao, L.; Agaian, S. A New Unified Impulse Noise Removal Algorithm Using a New Reference Sequence-to-Sequence Similarity Detector. IEEE Access 2018, 6, 37225–37236. [Google Scholar] [CrossRef]
- Chen, J.; Zhan, Y.; Cao, H. Adaptive Sequentially Weighted Median Filter for Image Highly Corrupted by Impulse Noise. IEEE Access 2019, 7, 158545–158556. [Google Scholar] [CrossRef]
- Elad, M.; Aharon, M. Image Denoising Via Sparse and Redundant Representations Over Learned Dictionaries. IEEE Trans. Image Process. 2006, 15, 3736–3745. [Google Scholar] [CrossRef]
- Li, X.; Shen, H.; Zhang, L.; Zhang, H.; Yuan, Q.; Yang, G. Recovering Quantitative Remote Sensing Products Contaminated by Thick Clouds and Shadows Using Multitemporal Dictionary Learning. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7086–7098. [Google Scholar]
- Farouk, R.M.; Khalil, H.A. Image Denoising based on Sparse Representation and Non-Negative Matrix Factorization. Life Sci. J. 2012, 9, 337–341. [Google Scholar]
- Li, X.; Wang, L.; Cheng, Q.; Wu, P.; Gan, W.; Fang, L. Cloud removal in remote sensing images using nonnegative matrix factorization and error correction. ISPRS J. Photogramm. Remote Sens. 2019, 148, 103–113. [Google Scholar] [CrossRef]
- Chatzis, V.; Pitas, I. Fuzzy scalar and vector median filters based on fuzzy distances. IEEE Trans. Image Process. 1999, 8, 731–734. [Google Scholar] [CrossRef]
- Plataniotis, K.; Androutsos, D.; Venetsanopoulos, A. Adaptive fuzzy systems for multichannel signal processing. Proc. IEEE 1999, 87, 1601–1622. [Google Scholar] [CrossRef]
- Shen, Y.; Barner, K. Fuzzy vector median-based surface smoothing. IEEE Trans. Vis. Comput. Graph. 2004, 10, 252–265. [Google Scholar] [CrossRef] [PubMed]
- Morillas, S.; Gregori, V.; Peris-Fajarnés, G.; Latorre, P. A New Vector Median Filter Based on Fuzzy Metrics; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2005; Volume 3656, pp. 81–90. [Google Scholar]
- Camarena, J.G.; Gregori, V.; Morillas, S.; Sapena, A. Fast detection and removal of impulsive noise using peer groups and fuzzy metrics. J. Vis. Commun. Image Represent. 2008, 19, 20–29. [Google Scholar] [CrossRef]
- Morillas, S.; Gregori, V.; Hervas, A. Fuzzy Peer Groups for Reducing Mixed Gaussian-Impulse Noise from Color Images. IEEE Trans. Image Process. 2009, 18, 1452–1466. [Google Scholar] [CrossRef]
- Malinski, L.; Smolka, B. Fast adaptive switching technique of impulsive noise removal in color images. J. Real-Time Image Process. 2019, 16, 1077–1098. [Google Scholar] [CrossRef]
- Garnett, R.; Huegerich, T.; Chui, C.; He, W. A universal noise removal algorithm with an impulse detector. IEEE Trans. Image Process. 2005, 14, 1747–1754. [Google Scholar] [CrossRef] [PubMed]
- Deng, Y.; Kenney, C.; Moore, M.; Manjunath, B. Peer group filtering and perceptual color image quantization. In Proceedings of the 1999 IEEE International Symposium on Circuits and Systems, Orlando, FL, USA, 30 May–2 June 1999; Volume 4, pp. 21–24. [Google Scholar]
- Kenney, C.; Deng, Y.; Manjunath, B.; Hewer, G. Peer group image enhancement. IEEE Trans. Image Process. 2001, 10, 326–334. [Google Scholar] [CrossRef] [PubMed]
- Malinski, L.; Smolka, B. Fast averaging peer group filter for the impulsive noise removal in color images. J. Real-Time Image Process. 2016, 11, 427–444. [Google Scholar] [CrossRef]
- Jin, L.; Liu, H.; Xu, X.; Song, E. Quaternion-based color image filtering for impulsive noise suppression. J. Electron. Imaging 2010, 19, 043003. [Google Scholar] [CrossRef]
- Geng Xin, H.X. Quaternion based switching filter for impulse noise removal in color images. J. Beijing Univ. Aeronaut. Astronaut. 2012, 92, 1181. [Google Scholar]
- Lin, T.C. Decision-based filter based on SVM and evidence theory for image noise removal. Neural Comput. Appl. 2012, 21, 695–703. [Google Scholar] [CrossRef]
- Liang, S.; Lu, S.; Chang, J.; Lin, C. A Novel Two-Stage Impulse Noise Removal Technique Based on Neural Networks and Fuzzy Decision. IEEE Trans. Fuzzy Syst. 2008, 16, 863–873. [Google Scholar] [CrossRef]
- Kaliraj, G.; Baskar, S. An efficient approach for the removal of impulse noise from the corrupted image using neural network based impulse detector. Image Vis. Comput. 2010, 28, 458–466. [Google Scholar] [CrossRef]
- Nair, M.S.; Shankar, V. Predictive-based adaptive switching median filter for impulse noise removal using neural network-based noise detector. Signal Image Video Process. 2013, 7, 1041–1070. [Google Scholar] [CrossRef]
- Turkmen, I. The ANN based detector to remove random-valued impulse noise in images. J. Vis. Commun. Image Represent. 2016, 34, 28–36. [Google Scholar] [CrossRef]
- Lefkimmiatis, S. Non-local Color Image Denoising with Convolutional Neural Networks. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 5882–5891. [Google Scholar]
- Lefkimmiatis, S. Universal Denoising Networks: A Novel CNN Architecture for Image Denoising. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 3204–3213. [Google Scholar]
- Zhang, K.; Zuo, W.; Zhang, L. FFDNet: Toward a Fast and Flexible Solution for CNN-Based Image Denoising. IEEE Trans. Image Process. 2018, 27, 4608–4622. [Google Scholar] [CrossRef] [PubMed]
- Fu, B.; Zhao, X.; Li, Y.; Wang, X.; Ren, Y. A convolutional neural networks denoising approach for salt and pepper noise. Multimed. Tools Appl. 2018, 78, 30707–30721. [Google Scholar] [CrossRef]
- Amaria, Y.; Miyazakia, T.; Koshimuraa, Y.; Yokoyamaa, Y.; Yamamoto, H. A Study on Impulse Noise Reduction Using CNN Learned by Divided Images. In Proceedings of the 6th IIAE International Conference on Industrial Application Engineering, Okinawa, Japan, 20–26 March 2018; pp. 93–100. [Google Scholar]
- Radlak, K.; Malinski, L.; Smolka, B. Deep learning for impulsive noise removal in color digital images. Procedding of 2019 International Society for Optics and Photonics, Baltimore, MD, USA, 5–8 May 2019; pp. 18–26. [Google Scholar]
- Chen, J.; Zhang, G.; Xu, S.; Yu, H. A Blind CNN Denoising Model for Random-Valued Impulse Noise. IEEE Access 2019, 7, 124647–124661. [Google Scholar] [CrossRef]
- Jin, L.; Zhang, W.; Ma, G.; Song, E. Learning deep CNNs for impulse noise removal in images. J. Vis. Commun. Image Represent. 2019, 62, 193–205. [Google Scholar] [CrossRef]
- Zhang, K.; Zuo, W.; Chen, Y.; Meng, D.; Zhang, L. Beyond a Gaussian Denoiser: Residual Learning of Deep CNN for Image Denoising. IEEE Trans. Image Process. 2017, 26, 3142–3155. [Google Scholar] [CrossRef]
- Zuo, W.; Zhang, K.; Zhang, L. Convolutional Neural Networks for Image Denoising and Restoration. In Denoising of Photographic Images and Video: Fundamentals, Open Challenges and New Trends; Springer International Publishing: Berlin/Heidelberg, Germany, 2018; pp. 93–123. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. In Proceedings of the International Conference on Learning Representations, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. In Advances in Neural Information Processing Systems 25; Curran Associates, Inc.: Red Hook, NY, USA, 2012; pp. 1097–1105. [Google Scholar]
- Ioffe, S.; Szegedy, C. Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift. In Proceedings of the 32nd ICML’15 International Conference on International Conference on Machine Learning, Lille, France, 6–11 July 2015; Volume 37, pp. 448–456. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Zhang, K.; Zuo, W.; Gu, S.; Zhang, L. Learning Deep CNN Denoiser Prior for Image Restoration. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 2808–2817. [Google Scholar]
- Glorot, X.; Bengio, Y. Understanding the difficulty of training deep feedforward neural networks. In Proceedings of the Thirteenth International Conference on Artificial Intelligence and Statistics, Sardinia, Italy, 13–15 May 2010. [Google Scholar]
- Kingma, D.; Ba, L. Adam: A Method for Stochastic Optimization. In Proceedings of the International Conference on Learning Representations, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Arbelaez, P.; Maire, M.; Fowlkes, C.; Malik, J. Contour Detection and Hierarchical Image Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 898–916. [Google Scholar] [CrossRef]
- Everingham, M.; Van Gool, L.; Williams, C.K.I.; Winn, J.; Zisserman, A. The PASCAL Visual Object Classes Challenge 2007 (VOC2007) Results. Available online: http://www.pascal-network.org/challenges/VOC/voc2007/workshop/index.html (accessed on 7 May 2020).
- Kuznetsova, A.; Rom, H.; Alldrin, N.; Uijlings, J.; Krasin, I.; Pont-Tuset, J.; Kamali, S.; Popov, S.; Malloci, M.; Duerig, T.; et al. The Open Images Dataset V4: Unified image classification, object detection, and visual relationship detection at scale. arXiv 2018, arXiv:1811.00982. [Google Scholar] [CrossRef]
- Jin, L.; Zhu, Z.; Song, E.; Xu, X. An effective vector filter for impulse noise reduction based on adaptive quaternion color distance mechanism. Signal Process. 2019, 155, 334–345. [Google Scholar] [CrossRef]
- Camarena, J.G.; Gregori, V.; Morillas, S.; Sapena, A. Two-step fuzzy logic-based method for impulse noise detection in colour images. Pattern Recognit. Lett. 2010, 31, 1842–1849. [Google Scholar] [CrossRef]
- Wu, J.; Tan, C. Random-valued impulse noise removal using fuzzy weighted non-local means. Signal Image Video Process. 2014, 8, 349–355. [Google Scholar] [CrossRef]
- Schulte, S.; Morillas, S.; Gregori, V.; Kerre, E.E. A New Fuzzy Color Correlated Impulse Noise Reduction Method. IEEE Trans. Image Process. 2007, 16, 2565–2575. [Google Scholar] [CrossRef]
- Yuan, G.; Ghanem, B. ℓ0TV: A Sparse Optimization Method for Impulse Noise Image Restoration. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 41, 352–364. [Google Scholar] [CrossRef]
- Delon, J.; Desolneux, A. A Patch-Based Approach for Removing Impulse or Mixed Gaussian-Impulse Noise. SIAM J. Imaging Sci. 2013, 6, 1140–1174. [Google Scholar] [CrossRef]
- Wang, G.; Liu, Y.; Zhao, T. A quaternion-based switching filter for colour image denoising. Signal Process. 2014, 102, 216–225. [Google Scholar] [CrossRef]
- Jin, L.; Zhu, Z.; Xu, X.; Li, X. Two-stage quaternion switching vector filter for color impulse noise removal. Signal Process. 2016, 128, 171–185. [Google Scholar] [CrossRef]
- Abiko, R.; Ikehara, M. Blind Denoising of Mixed Gaussian-impulse Noise by Single CNN. In Proceedings of the 2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; pp. 1717–1721. [Google Scholar]
- Zhou, Y.; Jiao, J.; Huang, H.; Wang, Y.; Wang, J.; Shi, H.; Huang, T. When AWGN-based Denoiser Meets Real Noises. arXiv 2019, arXiv:1904.03485. [Google Scholar]
- Zhou, W.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar]
- Martín, A.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado G., S.; Davis, A.; Dean, J.; Devin, M.; et al. TensorFlow: Large-Scale Machine Learning on Heterogeneous Systems. Software. 2015. Available online: tensorflow.org (accessed on 7 May 2020).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value/Method |
|---|---|
| Number of convolutional layers | 17 |
| Number of filters in convolutional layer | 64 |
| Size of convolutional window | |
| Number of epochs | 50 |
| Learning rate | 0.001 |
| Learning rate decay | 0.1 |
| Epoch in which learning rate decay is used | 30 |
| Batch size | 128 |
| Weights initialization | Glorot uniform initializer [59] |
| Weights optimization | ADAM optimizer [60] |
| Patch size |
| Training Repetition | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Average wACC | Average F1 | ||||||||||
| 1 | 2 | 3 | 4 | 5 | 1 | 2 | 3 | 4 | 5 | ||
| 0.1 | 0.9985 | 0.9987 | 0.9987 | 0.9985 | 0.9987 | 0.9926 | 0.9935 | 0.9933 | 0.9923 | 0.9937 | |
| 0.2 | 0.9984 | 0.9986 | 0.9986 | 0.9985 | 0.9985 | 0.9960 | 0.9965 | 0.9965 | 0.9962 | 0.9963 | |
| 0.3 | 0.9980 | 0.9981 | 0.9982 | 0.9981 | 0.9980 | 0.9966 | 0.9969 | 0.9970 | 0.9968 | 0.9967 | |
| 0.4 | 0.9970 | 0.9971 | 0.9972 | 0.9970 | 0.9970 | 0.9962 | 0.9963 | 0.9965 | 0.9963 | 0.9963 | |
| 0.5 | 0.9945 | 0.9944 | 0.9944 | 0.9941 | 0.9944 | 0.9945 | 0.9944 | 0.9944 | 0.9940 | 0.9944 | |
| Average FPR | Average FNR | ||||||||||
| 1 | 2 | 3 | 4 | 5 | 1 | 2 | 3 | 4 | 5 | ||
| 0.1 | 0.0014 | 0.0013 | 0.0013 | 0.0015 | 0.0012 | 0.0018 | 0.0016 | 0.0015 | 0.0015 | 0.0018 | |
| 0.2 | 0.0014 | 0.0012 | 0.0012 | 0.0014 | 0.0013 | 0.0025 | 0.0023 | 0.0022 | 0.0023 | 0.0024 | |
| 0.3 | 0.0014 | 0.0012 | 0.0012 | 0.0013 | 0.0013 | 0.0035 | 0.0034 | 0.0033 | 0.0034 | 0.0034 | |
| 0.4 | 0.0017 | 0.0014 | 0.0014 | 0.0013 | 0.0015 | 0.0051 | 0.0052 | 0.0050 | 0.0054 | 0.0051 | |
| 0.5 | 0.0020 | 0.0018 | 0.0016 | 0.0015 | 0.0018 | 0.0090 | 0.0093 | 0.0095 | 0.0103 | 0.0094 | |
| Average wACC | |||||||
|---|---|---|---|---|---|---|---|
| Patch size | |||||||
| 9 | 11 | 21 | 31 | 41 | 51 | 61 | |
| 0.1 | 0.1005 | 0.1026 | 0.9987 | 0.9986 | 0.9987 | 0.9985 | 0.9988 |
| 0.2 | 0.2063 | 0.2159 | 0.9985 | 0.9985 | 0.9985 | 0.9985 | 0.9986 |
| 0.3 | 0.5258 | 0.5887 | 0.9980 | 0.9980 | 0.9981 | 0.9980 | 0.9980 |
| 0.4 | 0.6003 | 0.6107 | 0.9969 | 0.9972 | 0.9971 | 0.9970 | 0.9969 |
| 0.5 | 0.5000 | 0.5005 | 0.9938 | 0.9950 | 0.9946 | 0.9944 | 0.9942 |
| Average wACC | |||||||
|---|---|---|---|---|---|---|---|
| BSD500 | |||||||
| Dataset Size | |||||||
| 10 | 50 | 100 | 200 | 300 | 400 | 500 | |
| 0.1 | 0.9910 | 0.9969 | 0.9983 | 0.9982 | 0.9985 | 0.9985 | 0.9987 |
| 0.2 | 0.9889 | 0.9962 | 0.9979 | 0.9982 | 0.9983 | 0.9984 | 0.9986 |
| 0.3 | 0.9830 | 0.9946 | 0.9970 | 0.9976 | 0.9978 | 0.9980 | 0.9982 |
| 0.4 | 0.9701 | 0.9909 | 0.9952 | 0.9962 | 0.9967 | 0.9970 | 0.9972 |
| 0.5 | 0.9434 | 0.9807 | 0.9898 | 0.9924 | 0.9938 | 0.9945 | 0.9944 |
| VOC2007 | |||||||
| 0.1 | 0.9906 | 0.9985 | 0.9985 | 0.9992 | 0.9993 | 0.9991 | 0.9992 |
| 0.2 | 0.9872 | 0.9977 | 0.9985 | 0.9989 | 0.9990 | 0.9990 | 0.9990 |
| 0.3 | 0.9798 | 0.9962 | 0.9977 | 0.9982 | 0.9984 | 0.9985 | 0.9986 |
| 0.4 | 0.9647 | 0.9931 | 0.9958 | 0.9967 | 0.9972 | 0.9973 | 0.9974 |
| 0.5 | 0.9345 | 0.9849 | 0.9894 | 0.9922 | 0.9930 | 0.9926 | 0.9939 |
| GoogleV4 dataset | |||||||
| 0.1 | 0.9907 | 0.9980 | 0.9983 | 0.9990 | 0.9986 | 0.9990 | 0.9993 |
| 0.2 | 0.9850 | 0.9979 | 0.9983 | 0.9988 | 0.9987 | 0.9990 | 0.9991 |
| 0.3 | 0.9766 | 0.9973 | 0.9979 | 0.9985 | 0.9985 | 0.9987 | 0.9988 |
| 0.4 | 0.9614 | 0.9954 | 0.9964 | 0.9975 | 0.9975 | 0.9980 | 0.9981 |
| 0.5 | 0.9332 | 0.9886 | 0.9900 | 0.9932 | 0.9937 | 0.9950 | 0.9952 |
| Average wACC | ||||
|---|---|---|---|---|
| Random | 0.1 | 0.3 | 0.5 | |
| 0.1 | 0.9991 | 0.9993 | 0.9987 | 0.9973 |
| 0.2 | 0.9985 | 0.9985 | 0.9985 | 0.9971 |
| 0.3 | 0.9976 | 0.9962 | 0.9981 | 0.9969 |
| 0.4 | 0.9965 | 0.9868 | 0.9971 | 0.9965 |
| 0.5 | 0.9948 | 0.9520 | 0.9947 | 0.9956 |
| IDCNNB | IDCNNG | AWQD | BDCNN | DnCNN | FAPGF | FASTAMF | FFNRF | FRF | FWNLM | INRF | L0TV | PARIGI | PD | PGF | QBSF | TSQSVF | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| FRUITS | |||||||||||||||||
| PSNR [dB] | |||||||||||||||||
| 0.1 | 39.78 | 40.35 | 38.39 | 34.74 | 35.18 | 37.61 | 38.30 | 36.97 | 36.03 | 33.10 | 33.90 | 27.76 | 34.66 | 33.62 | 37.03 | 32.98 | 36.68 |
| 0.2 | 36.54 | 37.24 | 35.47 | 34.81 | 36.47 | 34.69 | 35.47 | 33.20 | 33.21 | 31.60 | 32.03 | 27.18 | 33.14 | 32.52 | 32.52 | 29.83 | 33.45 |
| 0.3 | 34.22 | 35.00 | 32.65 | 34.16 | 33.75 | 32.19 | 32.70 | 28.44 | 30.80 | 30.46 | 30.28 | 26.06 | 31.00 | 30.57 | 27.85 | 27.83 | 31.03 |
| 0.4 | 32.37 | 33.20 | 30.55 | 32.83 | 31.37 | 29.89 | 29.86 | 23.95 | 27.62 | 29.25 | 28.43 | 25.30 | 29.25 | 28.18 | 23.52 | 26.35 | 28.85 |
| 0.5 | 29.71 | 30.08 | 27.68 | 30.63 | 27.87 | 26.53 | 25.40 | 19.88 | 22.27 | 27.60 | 25.26 | 24.67 | 26.81 | 25.13 | 19.67 | 24.16 | 26.01 |
| MAE | |||||||||||||||||
| 0.1 | 0.45 | 0.42 | 0.49 | 2.74 | 1.27 | 0.55 | 0.50 | 0.51 | 0.55 | 2.87 | 0.84 | 1.35 | 1.51 | 2.89 | 0.53 | 0.80 | 0.55 |
| 0.2 | 0.88 | 0.84 | 0.98 | 2.89 | 1.66 | 1.07 | 0.96 | 1.08 | 1.07 | 3.25 | 1.41 | 2.01 | 1.93 | 3.21 | 1.21 | 1.70 | 1.11 |
| 0.3 | 1.36 | 1.30 | 1.62 | 3.16 | 2.31 | 1.73 | 1.52 | 2.12 | 1.72 | 3.70 | 2.14 | 2.91 | 2.51 | 3.95 | 2.40 | 2.77 | 1.83 |
| 0.4 | 1.90 | 1.81 | 2.37 | 3.55 | 3.25 | 2.61 | 2.30 | 4.16 | 2.72 | 4.22 | 3.14 | 3.81 | 3.10 | 5.33 | 4.69 | 3.96 | 2.70 |
| 0.5 | 2.70 | 2.65 | 3.60 | 4.22 | 5.03 | 4.20 | 4.07 | 8.26 | 5.53 | 4.91 | 4.99 | 4.77 | 3.93 | 8.02 | 9.21 | 5.94 | 4.22 |
| SSIMc | |||||||||||||||||
| 0.1 | 0.985 | 0.987 | 0.980 | 0.947 | 0.972 | 0.979 | 0.983 | 0.978 | 0.978 | 0.892 | 0.973 | 0.916 | 0.935 | 0.912 | 0.974 | 0.934 | 0.971 |
| 0.2 | 0.970 | 0.974 | 0.962 | 0.936 | 0.953 | 0.956 | 0.966 | 0.940 | 0.958 | 0.877 | 0.947 | 0.881 | 0.918 | 0.895 | 0.927 | 0.867 | 0.940 |
| 0.3 | 0.950 | 0.958 | 0.938 | 0.916 | 0.920 | 0.921 | 0.941 | 0.842 | 0.934 | 0.859 | 0.909 | 0.825 | 0.896 | 0.853 | 0.824 | 0.811 | 0.906 |
| 0.4 | 0.925 | 0.936 | 0.905 | 0.889 | 0.861 | 0.861 | 0.893 | 0.649 | 0.877 | 0.838 | 0.843 | 0.768 | 0.872 | 0.774 | 0.640 | 0.751 | 0.858 |
| 0.5 | 0.880 | 0.886 | 0.845 | 0.853 | 0.744 | 0.746 | 0.772 | 0.420 | 0.660 | 0.808 | 0.721 | 0.718 | 0.842 | 0.659 | 0.433 | 0.671 | 0.779 |
| BALLOONS | |||||||||||||||||
| PSNR [dB] | |||||||||||||||||
| 0.1 | 40.09 | 40.91 | 37.44 | 29.92 | 36.65 | 36.94 | 38.18 | 37.09 | 36.26 | 33.86 | 34.52 | 32.93 | 36.15 | 31.23 | 37.27 | 32.87 | 36.59 |
| 0.2 | 36.83 | 37.75 | 34.94 | 33.46 | 34.52 | 34.56 | 35.54 | 33.35 | 33.16 | 32.79 | 32.84 | 31.07 | 34.74 | 30.41 | 32.59 | 29.85 | 33.55 |
| 0.3 | 34.17 | 35.13 | 32.40 | 33.89 | 32.22 | 32.24 | 32.94 | 28.37 | 30.54 | 31.62 | 31.02 | 29.38 | 32.24 | 29.17 | 27.53 | 27.86 | 31.02 |
| 0.4 | 31.90 | 33.30 | 30.14 | 32.78 | 30.03 | 29.90 | 30.04 | 23.52 | 27.29 | 30.72 | 28.75 | 27.79 | 30.13 | 27.17 | 22.90 | 26.09 | 28.54 |
| 0.5 | 28.56 | 29.85 | 27.34 | 30.97 | 26.78 | 26.25 | 25.11 | 19.20 | 21.89 | 29.41 | 25.14 | 26.80 | 28.31 | 24.71 | 18.85 | 23.95 | 25.55 |
| MAE | |||||||||||||||||
| 0.1 | 0.31 | 0.29 | 0.38 | 3.35 | 1.18 | 0.45 | 0.37 | 0.35 | 0.41 | 1.83 | 0.67 | 0.77 | 0.81 | 2.46 | 0.38 | 0.76 | 0.42 |
| 0.2 | 0.61 | 0.58 | 0.73 | 2.84 | 1.66 | 0.83 | 0.70 | 0.77 | 0.82 | 2.08 | 1.05 | 1.32 | 1.09 | 2.83 | 0.88 | 1.42 | 0.83 |
| 0.3 | 0.97 | 0.91 | 1.20 | 3.10 | 2.31 | 1.37 | 1.11 | 1.65 | 1.36 | 2.41 | 1.62 | 1.97 | 1.53 | 3.57 | 1.98 | 2.21 | 1.38 |
| 0.4 | 1.40 | 1.26 | 1.80 | 3.41 | 3.30 | 2.14 | 1.71 | 3.71 | 2.23 | 2.76 | 2.46 | 2.72 | 1.99 | 4.94 | 4.43 | 3.27 | 2.16 |
| 0.5 | 2.26 | 1.99 | 2.90 | 4.09 | 5.39 | 3.77 | 3.49 | 8.29 | 4.88 | 3.30 | 4.34 | 3.54 | 2.58 | 7.48 | 9.69 | 5.02 | 3.62 |
| SSIMc | |||||||||||||||||
| 0.1 | 0.993 | 0.994 | 0.990 | 0.899 | 0.978 | 0.983 | 0.989 | 0.987 | 0.985 | 0.949 | 0.982 | 0.929 | 0.976 | 0.942 | 0.980 | 0.933 | 0.980 |
| 0.2 | 0.985 | 0.986 | 0.980 | 0.916 | 0.960 | 0.963 | 0.977 | 0.955 | 0.969 | 0.940 | 0.964 | 0.884 | 0.969 | 0.920 | 0.939 | 0.875 | 0.959 |
| 0.3 | 0.973 | 0.977 | 0.964 | 0.895 | 0.926 | 0.929 | 0.960 | 0.851 | 0.948 | 0.929 | 0.932 | 0.835 | 0.955 | 0.876 | 0.823 | 0.826 | 0.931 |
| 0.4 | 0.954 | 0.966 | 0.939 | 0.881 | 0.852 | 0.863 | 0.920 | 0.635 | 0.900 | 0.915 | 0.867 | 0.783 | 0.941 | 0.791 | 0.612 | 0.775 | 0.886 |
| 0.5 | 0.902 | 0.923 | 0.887 | 0.857 | 0.690 | 0.724 | 0.783 | 0.378 | 0.690 | 0.888 | 0.725 | 0.730 | 0.920 | 0.673 | 0.375 | 0.705 | 0.802 |
| PEPPERS | |||||||||||||||||
| PSNR [dB] | |||||||||||||||||
| 0.1 | 47.75 | 47.88 | 44.06 | 28.68 | 40.50 | 44.52 | 45.88 | 43.33 | 44.09 | 38.06 | 40.83 | 37.90 | 39.72 | 35.77 | 41.21 | 36.40 | 41.94 |
| 0.2 | 43.85 | 44.41 | 39.81 | 32.26 | 36.92 | 40.54 | 41.34 | 35.52 | 39.99 | 36.50 | 37.86 | 34.71 | 38.43 | 33.94 | 33.44 | 33.37 | 37.63 |
| 0.3 | 40.67 | 41.64 | 36.56 | 33.90 | 33.99 | 35.93 | 36.50 | 28.11 | 36.12 | 35.12 | 34.39 | 32.58 | 36.68 | 30.64 | 26.48 | 30.94 | 34.07 |
| 0.4 | 37.54 | 39.16 | 33.19 | 33.52 | 30.51 | 31.98 | 31.75 | 22.28 | 29.99 | 33.92 | 30.60 | 30.41 | 34.71 | 27.82 | 21.09 | 28.42 | 30.20 |
| 0.5 | 32.38 | 34.02 | 28.35 | 31.89 | 26.51 | 26.79 | 24.67 | 17.59 | 22.17 | 31.86 | 24.64 | 27.46 | 31.62 | 26.22 | 16.91 | 25.04 | 25.32 |
| MAE | |||||||||||||||||
| 0.1 | 0.17 | 0.17 | 0.23 | 4.23 | 1.16 | 0.21 | 0.18 | 0.23 | 0.22 | 1.74 | 0.36 | 0.46 | 0.51 | 2.15 | 0.27 | 0.40 | 0.25 |
| 0.2 | 0.36 | 0.35 | 0.53 | 3.57 | 1.75 | 0.47 | 0.40 | 0.62 | 0.49 | 1.99 | 0.72 | 0.94 | 0.79 | 2.63 | 0.77 | 0.92 | 0.58 |
| 0.3 | 0.59 | 0.57 | 0.94 | 3.72 | 2.53 | 0.92 | 0.72 | 1.63 | 0.87 | 2.29 | 1.27 | 1.50 | 1.13 | 3.76 | 2.19 | 1.65 | 1.07 |
| 0.4 | 0.89 | 0.83 | 1.54 | 3.95 | 3.82 | 1.66 | 1.27 | 4.30 | 1.62 | 2.66 | 2.14 | 2.17 | 1.52 | 5.30 | 5.86 | 2.79 | 1.92 |
| 0.5 | 1.52 | 1.34 | 2.87 | 4.53 | 6.25 | 3.37 | 3.36 | 10.54 | 4.45 | 3.23 | 4.41 | 3.20 | 2.13 | 7.16 | 13.58 | 4.94 | 3.94 |
| SSIMc | |||||||||||||||||
| 0.1 | 0.997 | 0.997 | 0.995 | 0.847 | 0.952 | 0.992 | 0.995 | 0.993 | 0.993 | 0.955 | 0.991 | 0.955 | 0.983 | 0.939 | 0.987 | 0.971 | 0.990 |
| 0.2 | 0.993 | 0.994 | 0.987 | 0.874 | 0.905 | 0.979 | 0.989 | 0.960 | 0.986 | 0.947 | 0.977 | 0.917 | 0.977 | 0.914 | 0.938 | 0.942 | 0.977 |
| 0.3 | 0.988 | 0.990 | 0.974 | 0.855 | 0.850 | 0.946 | 0.973 | 0.835 | 0.973 | 0.936 | 0.948 | 0.876 | 0.968 | 0.870 | 0.774 | 0.907 | 0.952 |
| 0.4 | 0.977 | 0.984 | 0.947 | 0.838 | 0.762 | 0.878 | 0.934 | 0.583 | 0.925 | 0.923 | 0.884 | 0.834 | 0.958 | 0.821 | 0.498 | 0.849 | 0.897 |
| 0.5 | 0.932 | 0.954 | 0.867 | 0.812 | 0.615 | 0.733 | 0.773 | 0.317 | 0.694 | 0.891 | 0.714 | 0.783 | 0.941 | 0.748 | 0.275 | 0.745 | 0.765 |
| IDCNNB | IDCNNG | AWQD | BDCNN | DnCNN | FAPGF | FASTAMF | FFNRF | FRF | FWNLM | INRF | L0TV | PARIGI | PD | PGF | QBSF | TSQSVF | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Average PSNR [dB] | |||||||||||||||||
| 0.1 | 40.12 | 40.45 | 38.10 | 31.91 | 38.92 | 36.78 | 37.97 | 36.20 | 37.22 | 32.39 | 34.82 | 31.27 | 34.33 | 34.32 | 36.68 | 31.89 | 36.28 |
| 0.2 | 37.02 | 37.36 | 34.93 | 33.22 | 36.18 | 34.11 | 35.06 | 32.38 | 33.88 | 31.22 | 32.60 | 29.34 | 32.75 | 32.33 | 31.88 | 28.85 | 33.10 |
| 0.3 | 34.77 | 35.26 | 32.50 | 32.66 | 33.64 | 31.80 | 32.53 | 27.77 | 31.08 | 30.22 | 30.62 | 27.91 | 31.15 | 29.91 | 27.20 | 26.96 | 30.68 |
| 0.4 | 32.68 | 33.38 | 30.14 | 31.35 | 30.86 | 29.22 | 29.33 | 23.20 | 27.28 | 29.23 | 28.16 | 26.65 | 29.52 | 27.01 | 22.84 | 25.32 | 28.25 |
| 0.5 | 29.92 | 30.51 | 27.29 | 29.70 | 27.52 | 25.92 | 24.77 | 19.20 | 21.71 | 28.03 | 24.73 | 25.48 | 27.78 | 23.93 | 19.09 | 23.42 | 25.45 |
| Average MAE | |||||||||||||||||
| 0.1 | 0.46 | 0.45 | 0.57 | 3.74 | 1.18 | 0.72 | 0.60 | 0.72 | 0.59 | 2.76 | 1.01 | 1.38 | 1.62 | 2.35 | 0.63 | 0.93 | 0.61 |
| 0.2 | 0.92 | 0.90 | 1.14 | 3.48 | 1.71 | 1.31 | 1.12 | 1.34 | 1.21 | 3.30 | 1.65 | 2.24 | 2.18 | 2.99 | 1.40 | 1.96 | 1.24 |
| 0.3 | 1.42 | 1.39 | 1.84 | 3.91 | 2.41 | 2.02 | 1.72 | 2.44 | 2.01 | 3.90 | 2.45 | 3.16 | 2.82 | 4.13 | 2.75 | 3.18 | 2.03 |
| 0.4 | 2.01 | 1.94 | 2.77 | 4.51 | 3.49 | 3.04 | 2.60 | 4.78 | 3.30 | 4.58 | 3.59 | 4.20 | 3.58 | 6.10 | 5.50 | 4.72 | 3.13 |
| 0.5 | 2.86 | 2.75 | 4.24 | 5.38 | 5.45 | 4.80 | 4.59 | 9.48 | 6.56 | 5.39 | 5.66 | 5.38 | 4.53 | 9.46 | 10.75 | 7.08 | 4.94 |
| Average SSIMc | |||||||||||||||||
| 0.1 | 0.989 | 0.989 | 0.984 | 0.895 | 0.980 | 0.977 | 0.983 | 0.975 | 0.981 | 0.915 | 0.974 | 0.922 | 0.949 | 0.946 | 0.976 | 0.927 | 0.974 |
| 0.2 | 0.978 | 0.979 | 0.968 | 0.916 | 0.962 | 0.955 | 0.967 | 0.940 | 0.961 | 0.897 | 0.949 | 0.875 | 0.931 | 0.913 | 0.929 | 0.860 | 0.947 |
| 0.3 | 0.963 | 0.966 | 0.945 | 0.902 | 0.932 | 0.920 | 0.944 | 0.841 | 0.935 | 0.876 | 0.913 | 0.825 | 0.908 | 0.849 | 0.815 | 0.798 | 0.912 |
| 0.4 | 0.944 | 0.949 | 0.910 | 0.876 | 0.872 | 0.856 | 0.898 | 0.645 | 0.875 | 0.850 | 0.848 | 0.773 | 0.881 | 0.746 | 0.624 | 0.732 | 0.859 |
| 0.5 | 0.904 | 0.911 | 0.845 | 0.838 | 0.748 | 0.736 | 0.771 | 0.414 | 0.666 | 0.815 | 0.718 | 0.717 | 0.845 | 0.615 | 0.420 | 0.649 | 0.771 |
| Image Size | DnCNN | IDCNN | |
|---|---|---|---|
| 14 | 5.6 | 5.9 | |
| 16 | 11.3 | 11.3 | |
| 18 | 36.3 | 35.8 | |
| 20 | 134.3 | 134.2 | |
| 22 | 546.3 | 539.5 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Radlak, K.; Malinski, L.; Smolka, B. Deep Learning Based Switching Filter for Impulsive Noise Removal in Color Images. Sensors 2020, 20, 2782. https://doi.org/10.3390/s20102782
Radlak K, Malinski L, Smolka B. Deep Learning Based Switching Filter for Impulsive Noise Removal in Color Images. Sensors. 2020; 20(10):2782. https://doi.org/10.3390/s20102782
Chicago/Turabian StyleRadlak, Krystian, Lukasz Malinski, and Bogdan Smolka. 2020. "Deep Learning Based Switching Filter for Impulsive Noise Removal in Color Images" Sensors 20, no. 10: 2782. https://doi.org/10.3390/s20102782
APA StyleRadlak, K., Malinski, L., & Smolka, B. (2020). Deep Learning Based Switching Filter for Impulsive Noise Removal in Color Images. Sensors, 20(10), 2782. https://doi.org/10.3390/s20102782