MIMU/Odometer Fusion with State Constraints for Vehicle Positioning during BeiDou Signal Outage: Testing and Results



Abstract
1. Introduction
- (1)
- The model of the IMU/odometer with constraints is comprehensively given, detailed equations are listed and analyzed, and the influence of the odometer and constraints on the positioning errors were numerically compared and evaluated, which might be a reference for implementing these algorithms for different conditions.
- (2)
- The odometer and constraints were firstly implemented in a BeiDou Satellite Navigation System (BDS)/MIMU loosely-integrated navigation system for evaluating its performance and effectiveness in reducing and suppressing INS positioning errors while GNSS was unavailable, and positioning errors were presented for assessing these methods’ feasibility in a GNSS/INS integration framework.
- (3)
- In the experiments, both post-processing and real-time filed tests were carried out for assessing the odometer and NHC performance in improving the positioning accuracy, respectively, and the NHC and odometer were employed in the BDS/MIMU integrated navigation system, which was of great significance for improving the positioning accuracy during the BDS signal outage.
2. Model
2.1. GNSS/MIMU Loose Integration Model
2.2. State Constraints
2.3. MIMU/Odometer Measurement Model
2.4. MIMU/Odometer Measurement Model with Constraints
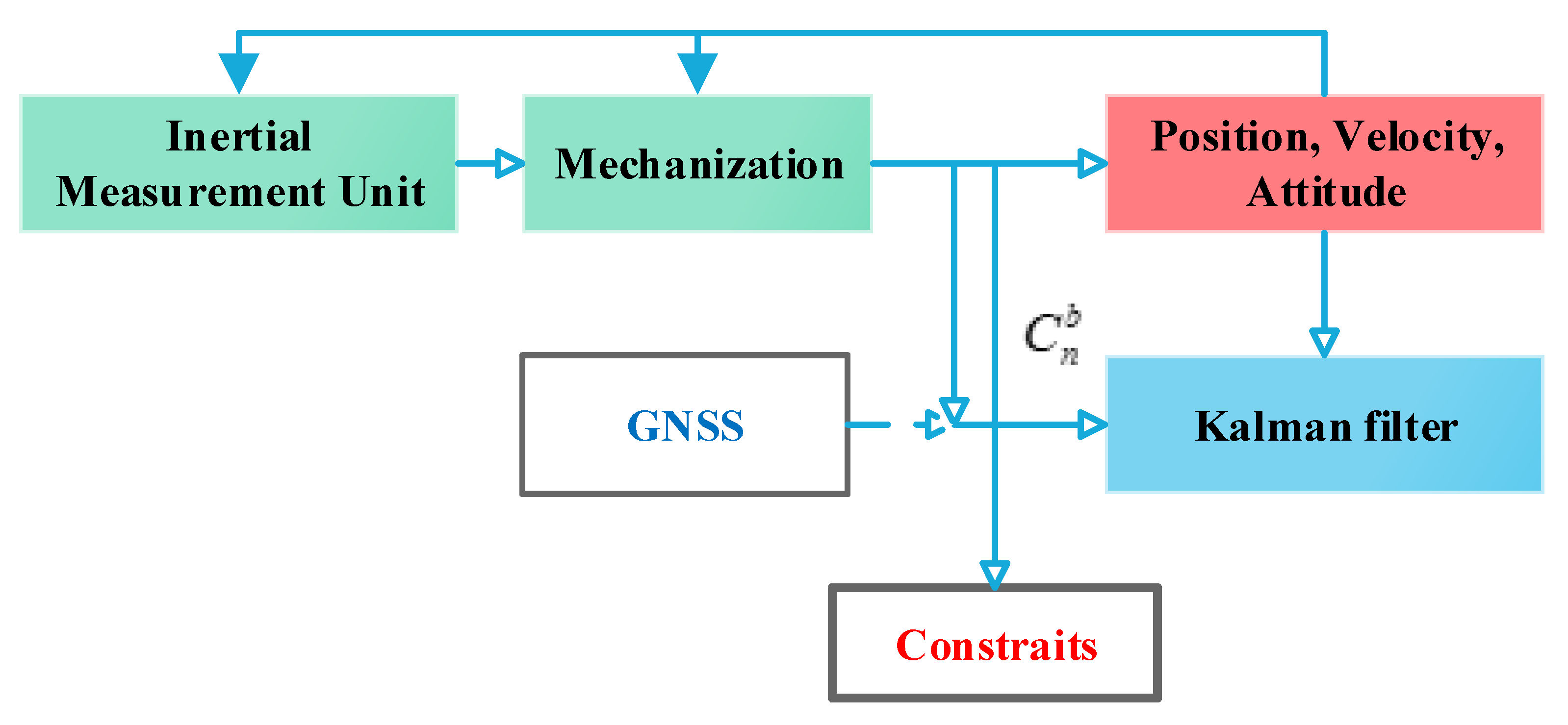
2.5. Integration Method
3. Results
3.1. Field Testing with Data Post-Processing
- (1)
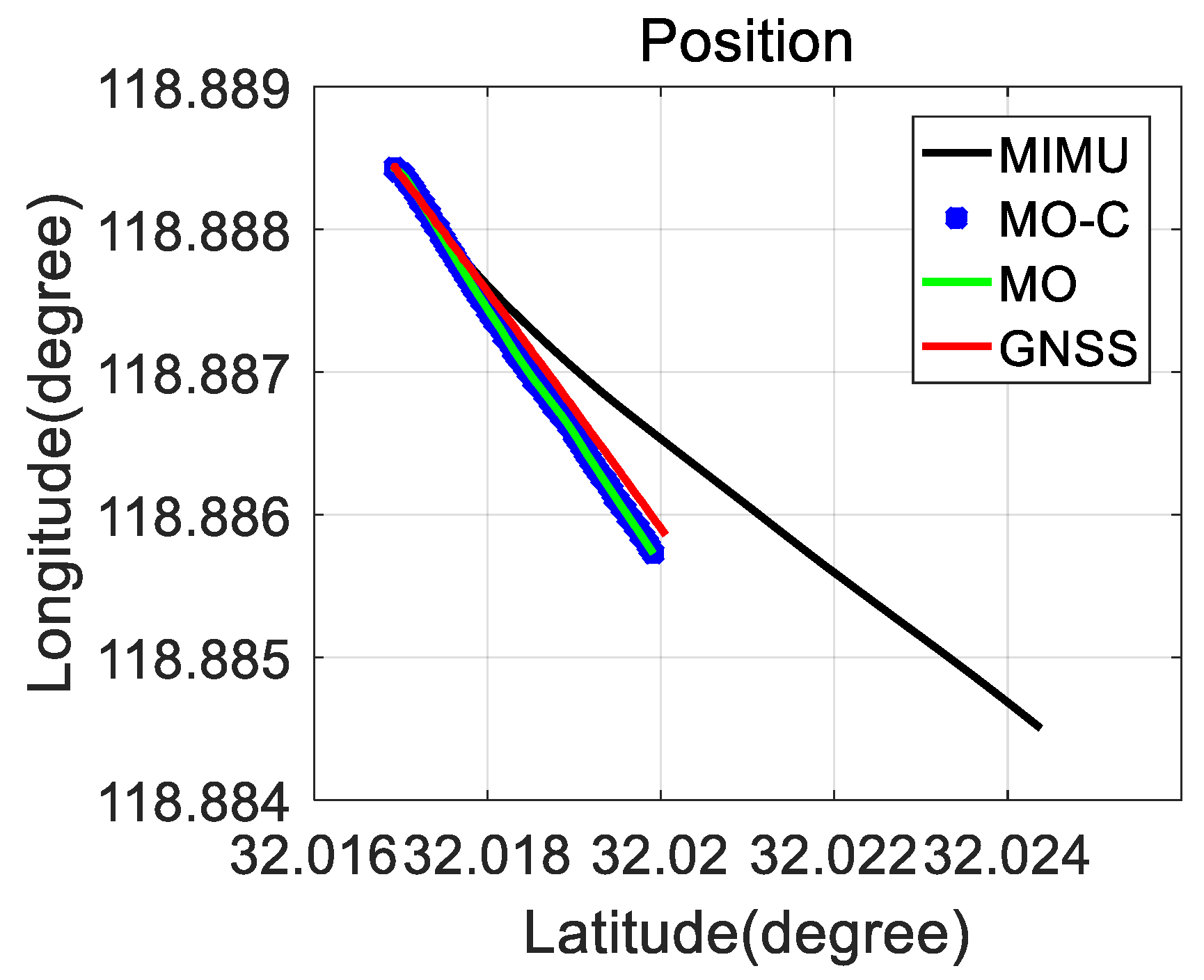
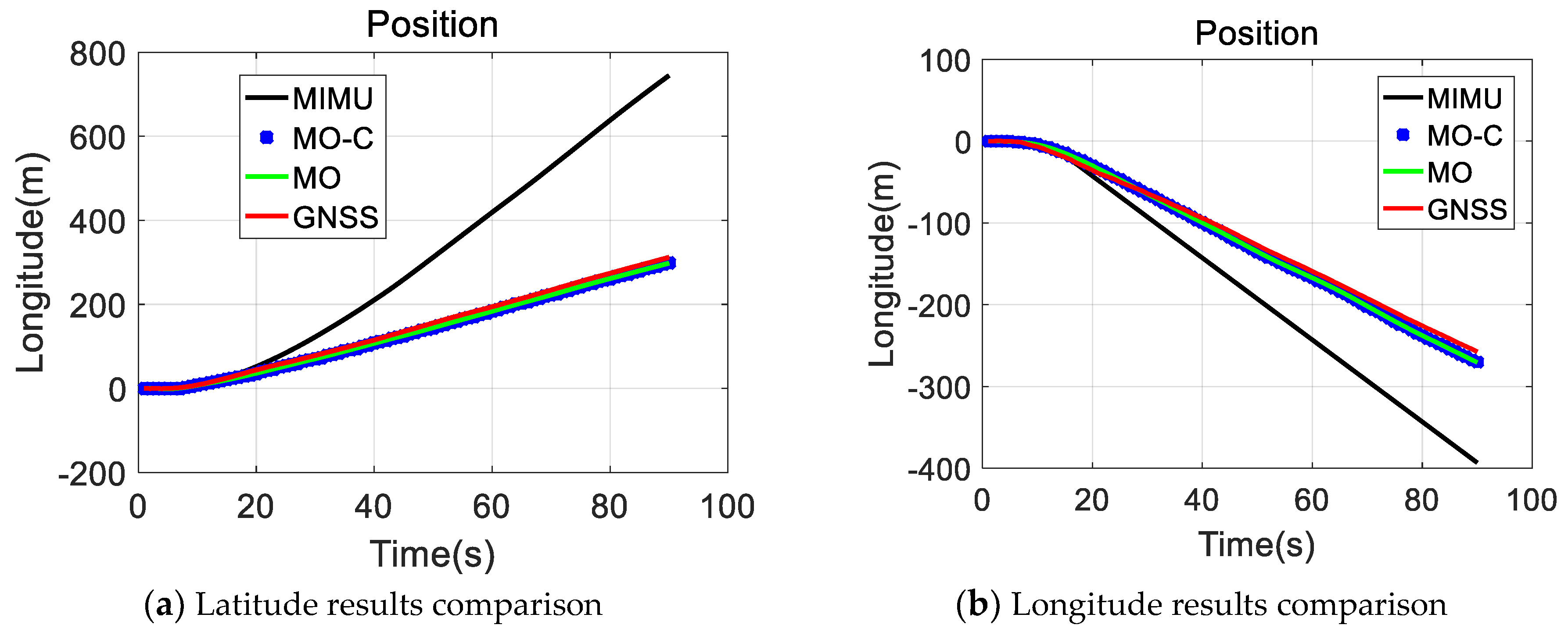
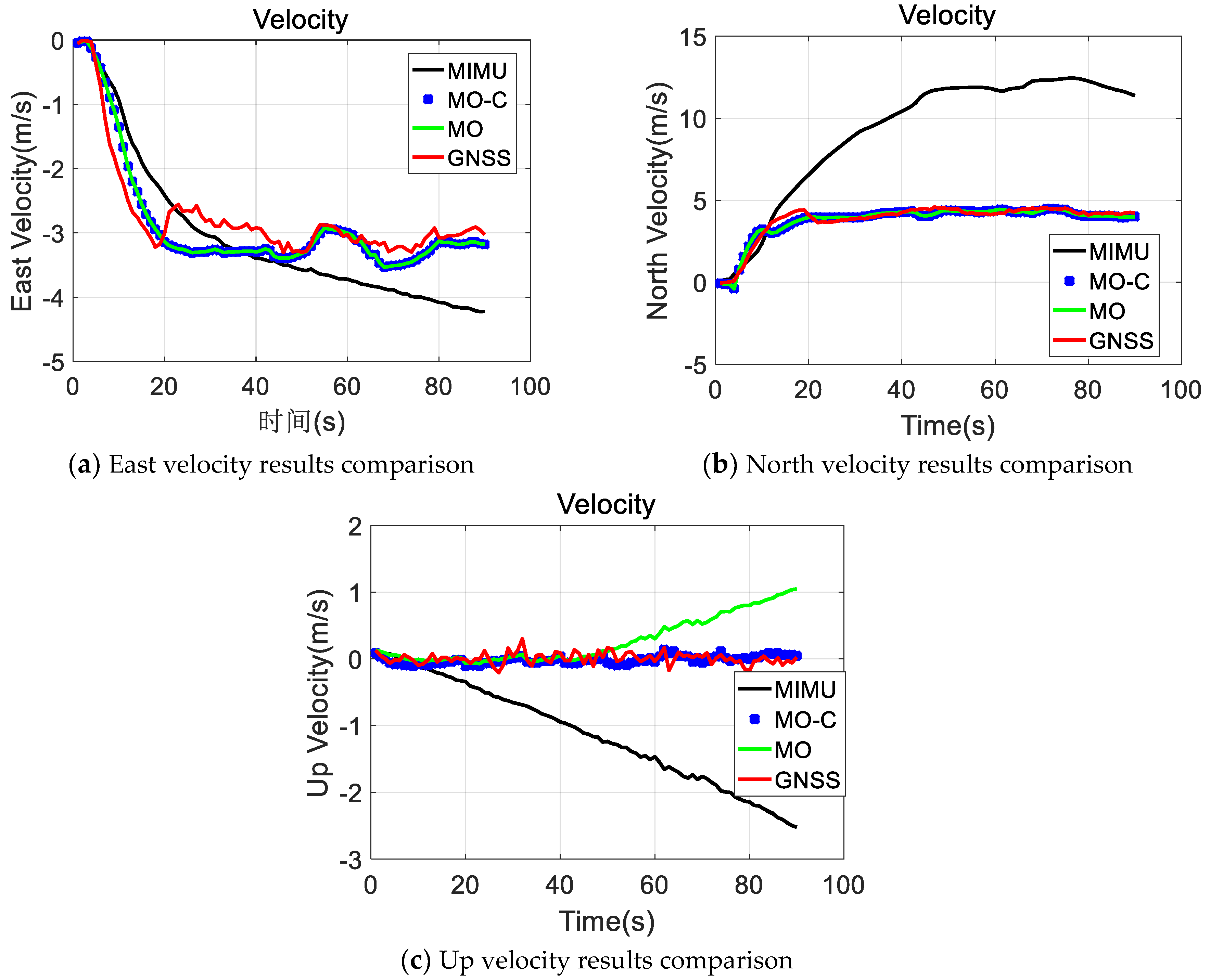
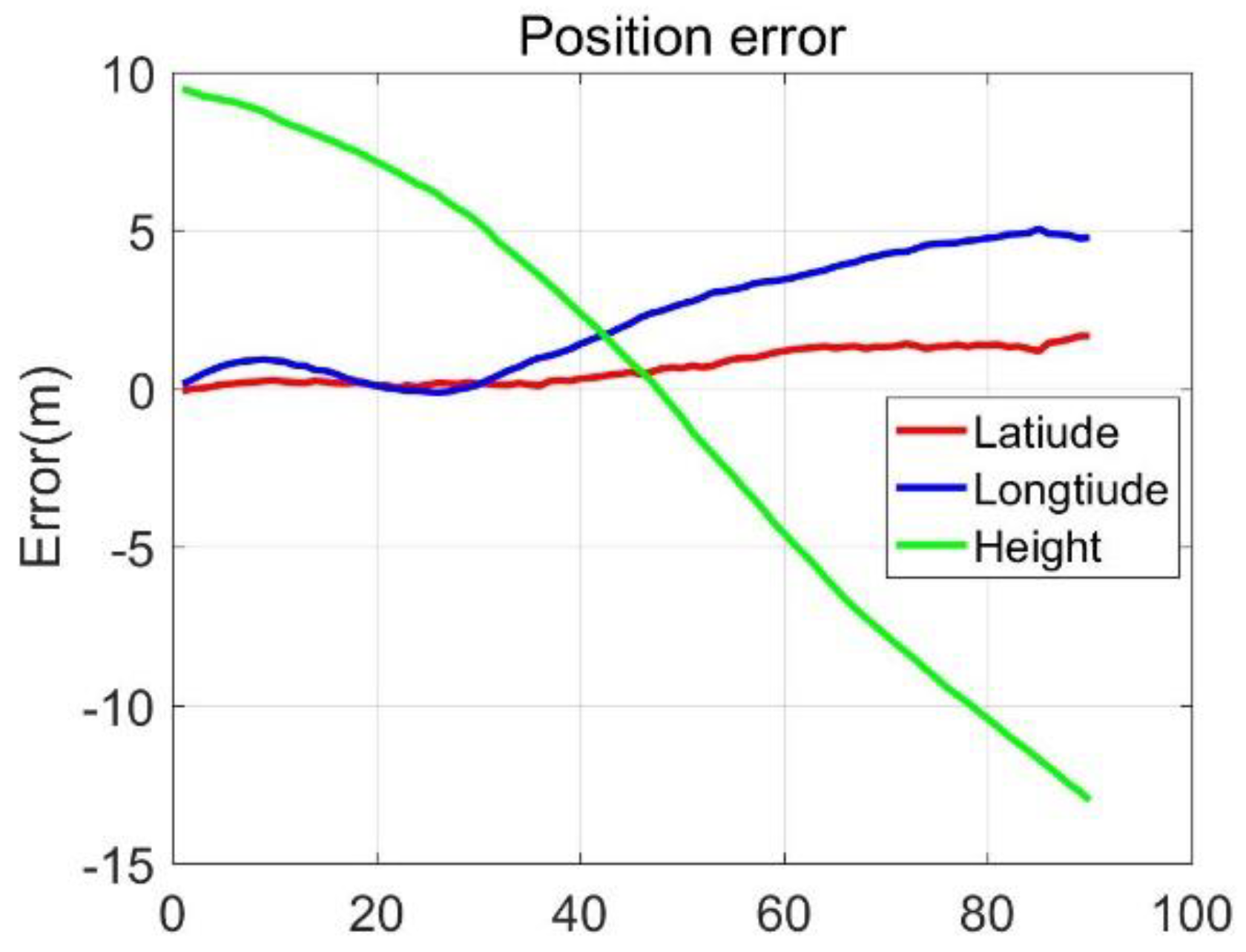
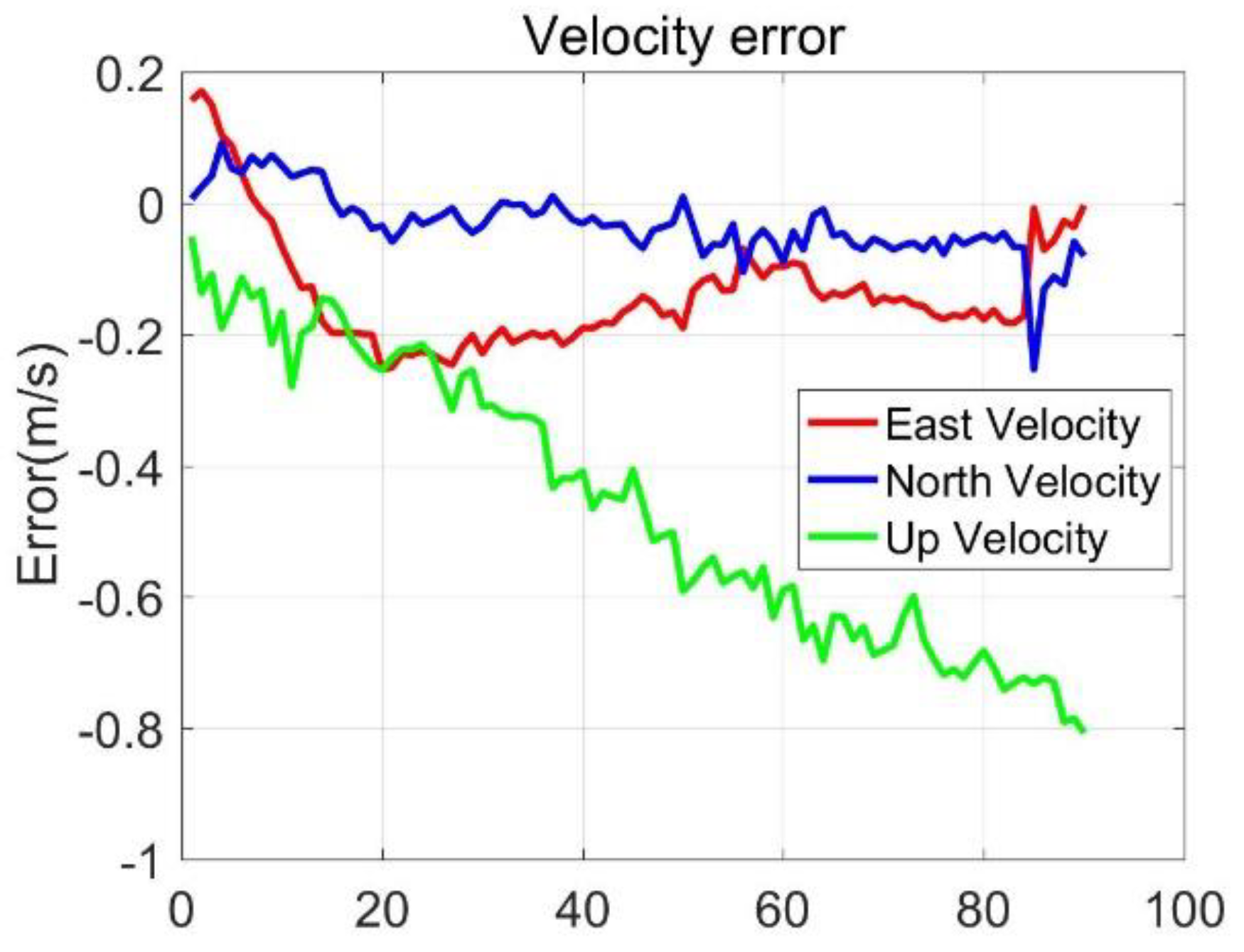
- Compared with the MIMU standalone, the positioning errors were suppressed with the odometer and constraints included, the latitude and longitude curves were almost consistent with the GNSS curves. The east and north velocity were also consistent with the GNSS results. The height and up velocity were also converging over time.
- (2)
- Compared with the MIMU standalone, within 90 s, the MO and MO-C latitude errors reduced by 98.8% and 98.9%; the MO and MO-C longitude errors reduced by 95.1% and 95.5%; the MO and MO-C height errors decreased by 81.1% and 95.9%. In aspects of the velocity errors, both MO and MO-C east velocity errors reduced by 87.2%; the MO and MO-C north velocity errors decreased by 96.8% and 96.9%; the MO and MO-C up velocity obtained a 63.4% and 99.2% improvement. Among them, the up direction position and velocity errors obtained the largest reduction compared with that of other directions.
3.2. Field Testing with Real-Time Data Processing
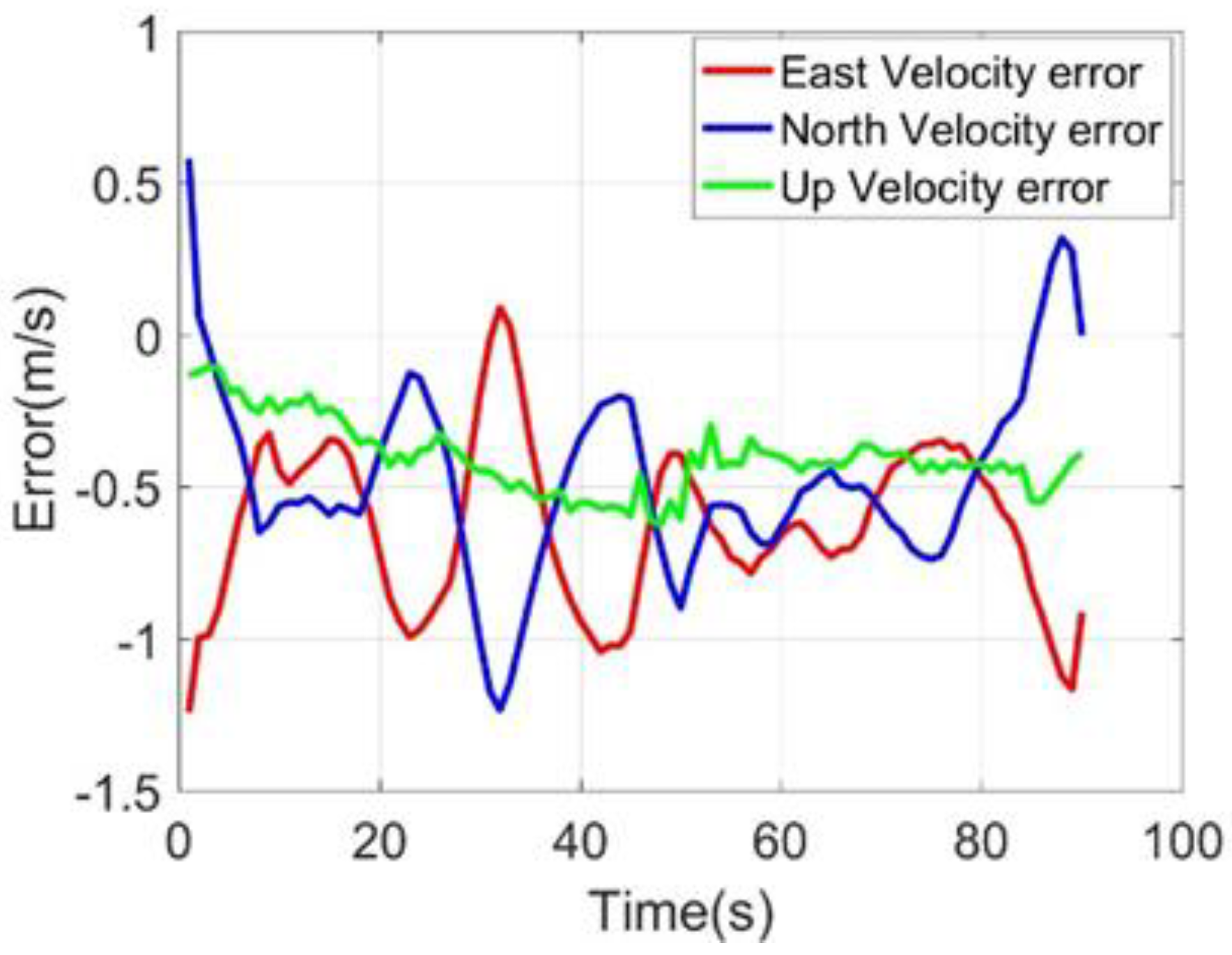
3.2.1. MIMU with Constraints
3.2.2. MIMU/Odometer Integration
3.2.3. MIMU/Odometer Integration with Constraints
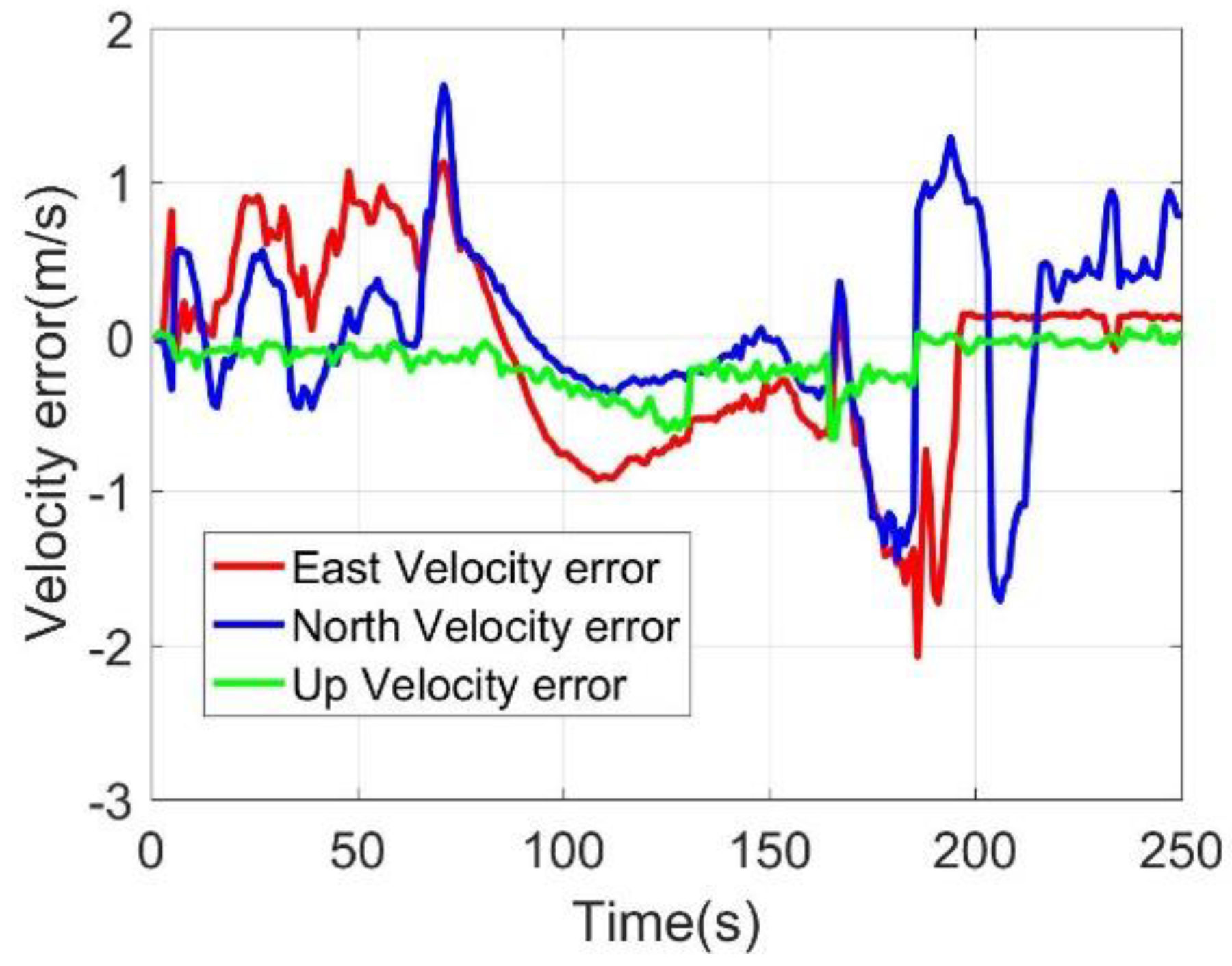
3.2.4. Implementation of MC-O in MIMU/BDS during Signal Outage
4. Discussion
- (1)
- In the above experiments, the testing time was 90 s, and the position errors would diverge due to the odometer errors and the heading angle errors. In the MO-C, there were no constraints for the heading angle. Other sensors or methods, providing better heading angles, could certainly improve the MO-C position accuracy while GNSS was unavailable for a long time.
- (2)
- In the experiments, we removed the GNSS antenna for simulating the signal outage for assessing the MO-C, in fact, in urban areas, although part of the GNSS satellites were blocked by the surrounding buildings, there were still a few satellites in view. However, there were not enough for generating precise three-dimensional navigation solutions, the remaining satellites might be helpful in the MO-C for aiding the navigation solutions estimation.
- (3)
- Although the NHC and odometer were effective during the GNSS signals outage, it was still necessary for GNSS/MIMU/odometer integration system, while the GNSS was normal, some MIMU and odometer parameters could be estimated and calibrated, which could help reduce the positioning errors during GNSS signal outage.
5. Conclusions
- (1)
- Odometer was effective for reducing the latitude and longitude errors, however, it has almost no influence on height accuracy.
- (2)
- These constraints were effective for the height error reduction, but its influence on the latitude and longitude errors were related to the moving direction of the vehicle.
- (3)
- With the odometer and constraints aiding, the heading angle heavily affects the accuracy of the navigation solutions. If the heading angle could be determined precisely, the multi-sensor fusion method could provide long-time three-dimensional navigation solutions without GNSS.
- (4)
- This paper firstly presented the implementation and evaluation of these methods in the BDS/MIMU loose integration system, and the satisfying results could support the BDS for vehicles in urban areas.
- (5)
- The methods discussed in the paper could also be implemented in a BDS chip receiver, and MIMU could be connected to the BDS chip-scale receiver for improving the reliability and robustness of the navigation solutions.
Author Contributions
Funding
Conflicts of Interest
References
- Imparato, D.; El-Mowafy, A.; Rizos, C.; Wang, J. A review of SBAS and RTK vulnerabilities in Intelligent Transport Systems applications. In Proceedings of the IGNSS Symposium 2018, Sydney, Australia, 7–9 February 2018; pp. 1–18. [Google Scholar]
- Chen, Y.; Tang, J.; Jiang, C.; Zhu, L.; Lehtomäki, M.; Kaartinen, H.; Kaijaluoto, R.; Wang, Y.; Hyyppä, J.; Hyyppä, H.; et al. The accuracy comparison of three simultaneous localization and mapping (SLAM)-based indoor mapping technologies. Sensors 2018, 18, 3228. [Google Scholar] [CrossRef] [PubMed]
- Quack, T.M.; Reiter, M.; Abel, D. Digital map generation and localization for vehicles in urban intersections using LiDAR and GNSS data. IFAC-PapersOnLine 2017, 50, 251–257. [Google Scholar] [CrossRef]
- Jiang, C.; Chen, S.; Chen, Y.; Bo, Y. Research on a chip scale atomic clock driven GNSS/SINS deeply coupled navigation system for augmented performance. IET Radar Sonar Navig. 2019, 13, 326–331. [Google Scholar] [CrossRef]
- Fernández, A.; Wis, M.; Silva, P.F.; Colomina, I.; Pares, E.; Dovis, F.; Ali, K.; Friess, P.; Lindenberger, J. GNSS/INS/LiDAR integration in urban environment: Algorithm description and results from ATENEA test campaign. In Proceedings of the 2012 6th ESA Workshop on Satellite Navigation Technologies (Navitec 2012) & European Workshop on GNSS Signals and Signal, Noordwijk, The Netherland, 5–7 December 2012; pp. 1–8. [Google Scholar] [CrossRef]
- Jiang, C.; Chen, S.; Chen, Y.; Bo, Y.; Han, L.; Guo, J.; Feng, Z.; Zhou, H. Performance analysis of a deep simple recurrent unit recurrent neural network (SRU-RNN) in MEMS gyroscope de-noising. Sensors 2018, 18, 4471. [Google Scholar] [CrossRef]
- El-Sheimy, N.; Hou, H.; Niu, X. Analysis and modeling of inertial sensors using Allan variance. IEEE Trans. Instrum. Meas. 2007, 57, 140–149. [Google Scholar] [CrossRef]
- Syed, Z.F.; Aggarwal, P.; Goodall, C.; Niu, X.; El-Sheimy, N. A new multi-position calibration method for MEMS inertial navigation systems. Meas. Sci. Technol. 2007, 18, 1897–1907. [Google Scholar] [CrossRef]
- Grip, H.F.; Fossen, T.I.; Johansen, T.A.; Saberi, A. Globally exponentially stable attitude and gyro bias estimation with application to GNSS/INS integration. Automatica 2015, 51, 158–166. [Google Scholar] [CrossRef]
- Jiang, C.; Chen, Y.; Chen, S.; Bo, Y.; Li, W.; Tian, W.; Guo, J. A mixed deep recurrent neural network for MEMS gyroscope noise suppressing. Electronics 2019, 8, 181. [Google Scholar] [CrossRef]
- Ismail, M.; Abdelkawy, E. A hybrid error modeling for MEMS IMU in integrated GPS/INS navigation system. J. Glob. Position. Syst. 2018, 16, 6. [Google Scholar] [CrossRef]
- Xing, H.; Hou, B.; Lin, Z.; Guo, M. Modeling and compensation of random drift of MEMS gyroscopes based on least squares support vector machine optimized by chaotic particle swarm optimization. Sensors 2017, 17, 2335. [Google Scholar] [CrossRef]
- Jiang, C.; Chen, S.; Chen, Y.; Zhang, B.; Feng, Z.; Zhou, H.; Bo, Y. A MEMS IMU de-noising method using long short term memory recurrent neural networks (LSTM-RNN). Sensors 2018, 18, 3470. [Google Scholar] [CrossRef]
- Wu, Y.; Goodall, C.; El-Sheimy, N. Self-calibration for IMU/odometer land navigation: Simulation and test results. In Proceedings of the ION International Technical Meeting, San Diego, CA, USA, 25–27 January 2010. [Google Scholar]
- Nieminen, T.; Kangas, J.J.J.; Suuriniemi, S.; Kettunen, L. An enhanced multi-position calibration method for consumer-grade inertial measurement units applied and tested. Meas. Sci. Technol. 2010, 21, 105204. [Google Scholar] [CrossRef]
- Qin, H.; Cong, L.; Sun, X. Accuracy improvement of GPS/MEMS-INS integrated navigation system during GPS signal outage for land vehicle navigation. J. Syst. Eng. Electron. 2012, 23, 256–264. [Google Scholar] [CrossRef]
- Nassar, S.; Niu, X.; El-Sheimy, N. Land-vehicle INS/GPS accurate positioning during GPS signal blockage periods. J. Surv. Eng. 2007, 133, 134–143. [Google Scholar] [CrossRef]
- Chen, L.; Fang, J. A hybrid prediction method for bridging GPS outages in high-precision POS application. IEEE Trans. Instrum. Meas. 2014, 63, 1656–1665. [Google Scholar] [CrossRef]
- Davidson, P.; Hautamäki, J.; Collin, J. Using low-cost MEMS 3D accelerometer and one gyro to assist GPS based car navigation system. In Proceedings of the 15th Saint Petersburg International Conference on Integrated Navigation Systems, Saint Petersburg, Russia, 26–28 May 2008. [Google Scholar]
- Yang, L.; Li, Y.; Wu, Y.; Rizos, C. An enhanced MEMS-INS/GNSS integrated system with fault detection and exclusion capability for land vehicle navigation in urban areas. GPS Solut. 2013, 18, 593–603. [Google Scholar] [CrossRef]
- Jiang, C.; Chen, S.; Bo, Y.; Sun, Z.; Lu, Q. Implementation and performance evaluation of a fast relocation method in a GPS/SINS/CSAC integrated navigation system hardware prototype. IEICE Electron. Express 2017, 14, 20170121. [Google Scholar] [CrossRef]
- Soloviev, A.; Venable, D. Integration of GPS and vision measurements for navigation in GPS challenged environments. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Indian Wells, CA, USA, 4–6 May 2010; pp. 826–833. [Google Scholar] [CrossRef]
- Wang, J.; Garratt, M.; Lambert, A.; Wang, J.J.; Han, S.; Sinclair, D. Integration of GPS/INS/vision sensors to navigate unmanned aerial vehicles. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 963–969. [Google Scholar]
- Yun, S.; Lee, Y.J.; Sung, S. IMU/Vision/Lidar Integrated Navigation System in GNSS Denied Environments. In Proceedings of the 2013 IEEE Aerospace Conference. Available online: citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.436.2328&rep=rep1&type=pdf (accessed on 16 April 2020).
- Cai, H.; Hu, Z.; Huang, G.; Zhu, D.; Su, X. Integration of GPS, monocular vision, and high definition (HD) map for accurate vehicle localization. Sensors 2018, 18, 3270. [Google Scholar] [CrossRef]
- Georgy, J.; Noureldin, A.; Korenberg, M.J.; Bayoumi, M.M. Modeling the stochastic drift of a MEMS-based gyroscope in Gyro/Odometer/GPS integrated navigation. IEEE Trans. Intell. Transp. Syst. 2010, 11, 856–872. [Google Scholar] [CrossRef]
- Georgy, J.; Karamat, T.; Iqbal, U.; Noureldin, A. Enhanced MEMS-IMU/odometer/GPS integration using mixture particle filter. GPS Solut. 2010, 15, 239–252. [Google Scholar] [CrossRef]
- Li, Z.; Wang, J.; Li, B.; Gao, J.; Tan, X. GPS/INS/Odometer integrated system using fuzzy neural network for land vehicle navigation applications. J. Navig. 2014, 67, 967–983. [Google Scholar] [CrossRef]
- Gao, Z.; Ge, M. Odometer and MEMS IMU enhancing PPP under weak satellite observability environments. Adv. Space Res. 2018, 62, 2494–2508. [Google Scholar] [CrossRef]
- Simon, D. Kalman filtering with state constraints: A survey of linear and nonlinear algorithms. IET Control. Theory Appl. 2010, 4, 1303–1318. [Google Scholar] [CrossRef]
- Zhou, G.; Li, K.; Kirubarajan, T.; Xu, L. State estimation with trajectory shape constraints using pseudomeasurements. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2395–2407. [Google Scholar] [CrossRef]
- Zhou, G.; Li, K.; Kirubarajan, T. Constrained state estimation using noisy destination information. Signal. Process. 2020, 166, 107226. [Google Scholar] [CrossRef]
- Niu, X.; Li, Y.; Zhang, Q.; Cheng, Y.; Shi, C. Observability analysis of non-holonomic constraints for land-vehicle navigation systems. J. Glob. Position. Syst. 2012, 11, 80–88. [Google Scholar] [CrossRef]
- MathWorks. Available online: https://www.mathworks.com/products/matlab.html (accessed on 16 April 2020).




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gyroscope | Bias stability (degree/h) | ≤3 degree/h |
| Scale factor nonlinearity (ppm) | ≤200 ppm | |
| White noise (degree/h) | 0.1 degree/h | |
| Accelerometer | Bias stability (mg) | 0.1 mg |
| Scale factor nonlinearity (ppm) | ≤150 ppm | |
| White noise (mg) | 0.05 mg |
| Latitude (m) | Longitude (m) | Height (m) | East Velocity (m/s) | North Velocity (m/s) | Up Velocity (m/s) | ||
|---|---|---|---|---|---|---|---|
| MIMU | 90s error | 480.1 | −150.6 | −95.37 | −1.189 | 7.144 | −2.544 |
| RMSE | 234.56 | 81.31 | 40.36 | 0.715 | 6.121 | 1.365 | |
| MO | 90s error | −5.55 | −7.30 | 18.06 | −0.152 | −0.225 | 0.931 |
| RMSE | 8.59 | 7.01 | 10.34 | 0.330 | 0.286 | 0.416 | |
| MO-C | 90s error | −5.28 | −6.74 | 3.90 | −0.152 | −0.223 | 0.020 |
| RMSE | 8.54 | 6.93 | 2.08 | 0.304 | 0.286 | 0.101 |
| Latitude (m) | Longitude (m) | Height (m) | East Velocity (m/s) | North Velocity (m/s) | Up Velocity (m/s) | ||
|---|---|---|---|---|---|---|---|
| M-C | 90s | −25.85 | −28.80 | −3.06 | −0.91 | 0.27 | −0.38 |
| RMSE | 16.662 | 18.761 | 4.931 | 0.686 | 0.567 | 0.367 | |
| MO | 90s | 1.74 | 4.73 | −13.35 | 0.03 | −0.06 | −0.85 |
| RMSE | 0.876 | 2.910 | 7.301 | 0.162 | 0.060 | 0.503 | |
| MO-C | 90s | 1.72 | −1.36 | −4.38 | 0.02 | −0.04 | −0.23 |
| RMSE | 1.911 | 2.112 | 5.487 | 0.142 | 0.077 | 0.168 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, K.; Guo, X.; Jiang, C.; Xue, Y.; Li, Y.; Han, L.; Chen, Y. MIMU/Odometer Fusion with State Constraints for Vehicle Positioning during BeiDou Signal Outage: Testing and Results. Sensors 2020, 20, 2302. https://doi.org/10.3390/s20082302
Zhu K, Guo X, Jiang C, Xue Y, Li Y, Han L, Chen Y. MIMU/Odometer Fusion with State Constraints for Vehicle Positioning during BeiDou Signal Outage: Testing and Results. Sensors. 2020; 20(8):2302. https://doi.org/10.3390/s20082302
Chicago/Turabian StyleZhu, Kai, Xuan Guo, Changhui Jiang, Yujingyang Xue, Yuanjun Li, Lin Han, and Yuwei Chen. 2020. "MIMU/Odometer Fusion with State Constraints for Vehicle Positioning during BeiDou Signal Outage: Testing and Results" Sensors 20, no. 8: 2302. https://doi.org/10.3390/s20082302
APA StyleZhu, K., Guo, X., Jiang, C., Xue, Y., Li, Y., Han, L., & Chen, Y. (2020). MIMU/Odometer Fusion with State Constraints for Vehicle Positioning during BeiDou Signal Outage: Testing and Results. Sensors, 20(8), 2302. https://doi.org/10.3390/s20082302