Seismic Discrimination between Earthquakes and Explosions Using Support Vector Machine



Abstract
1. Introduction
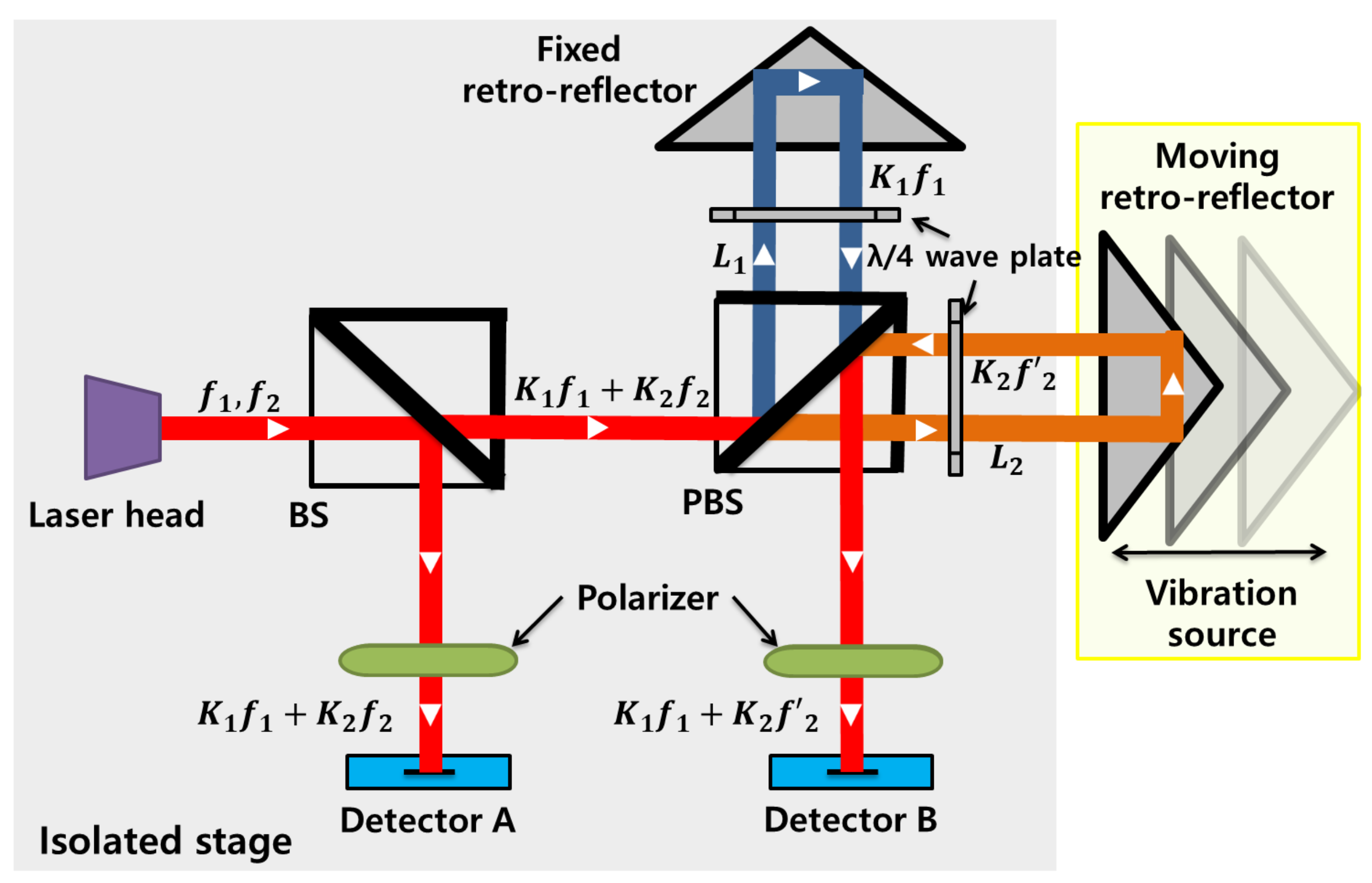
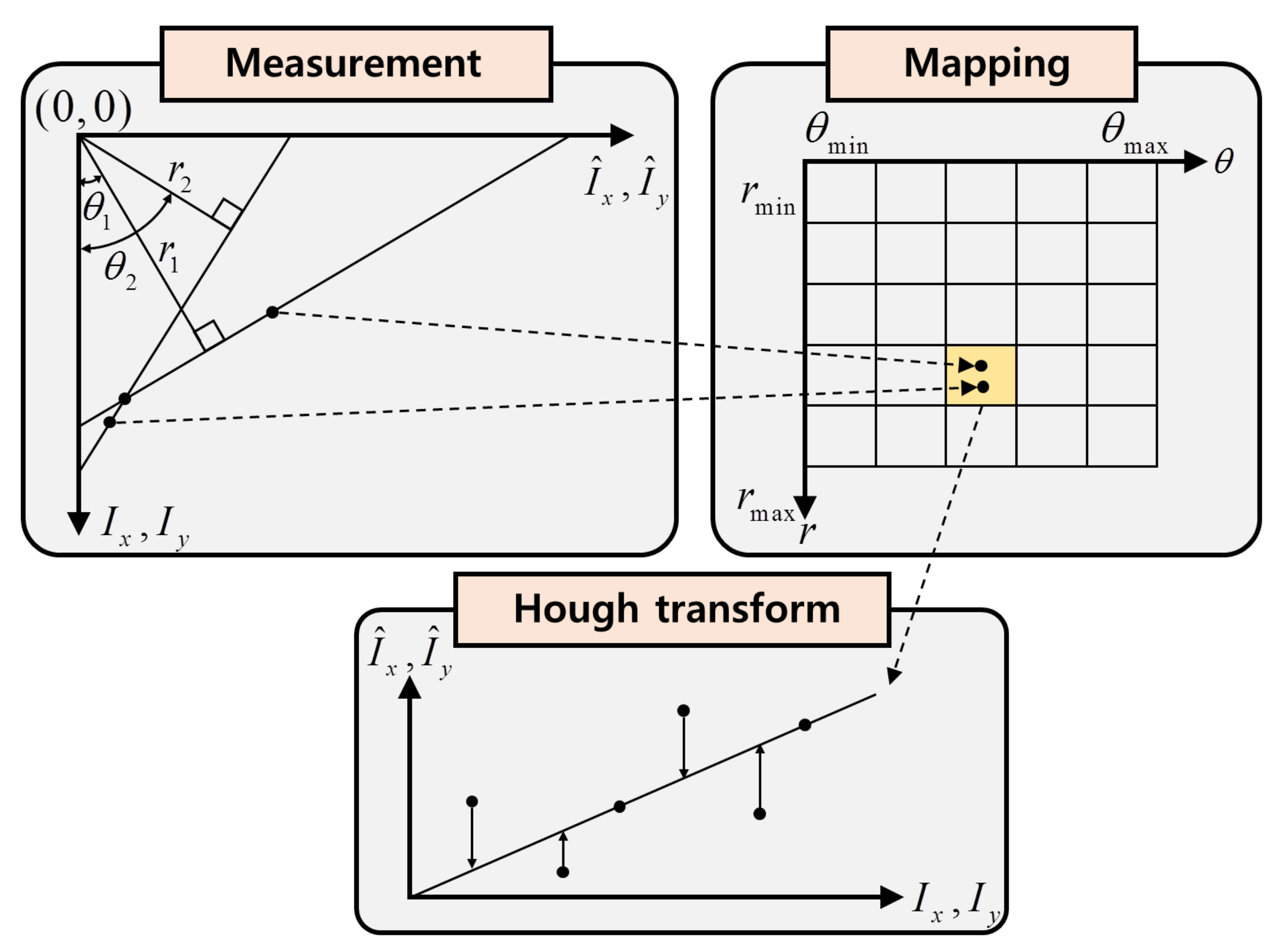
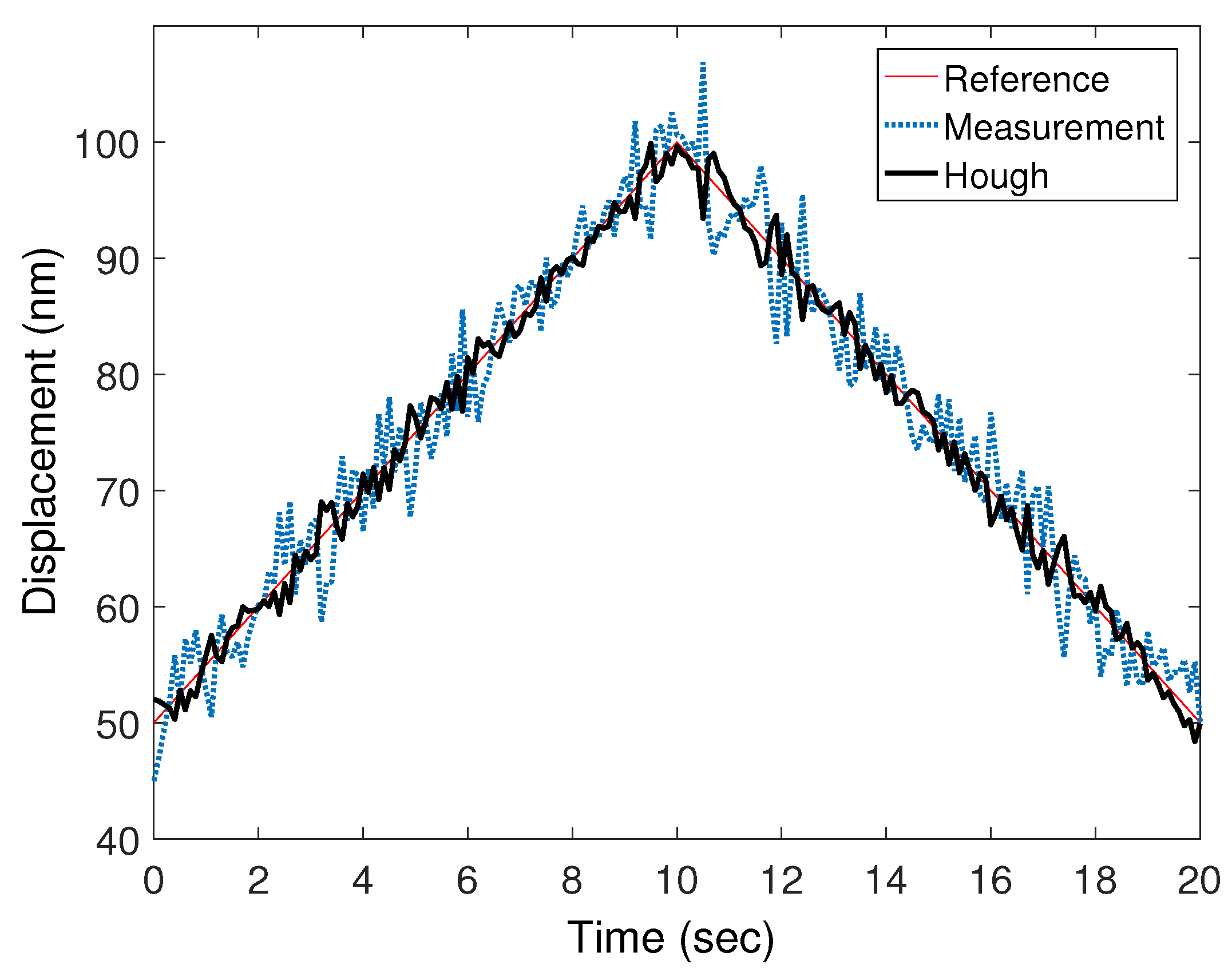
2. Hough Transform-Based Interferometric Seismometer Compensation
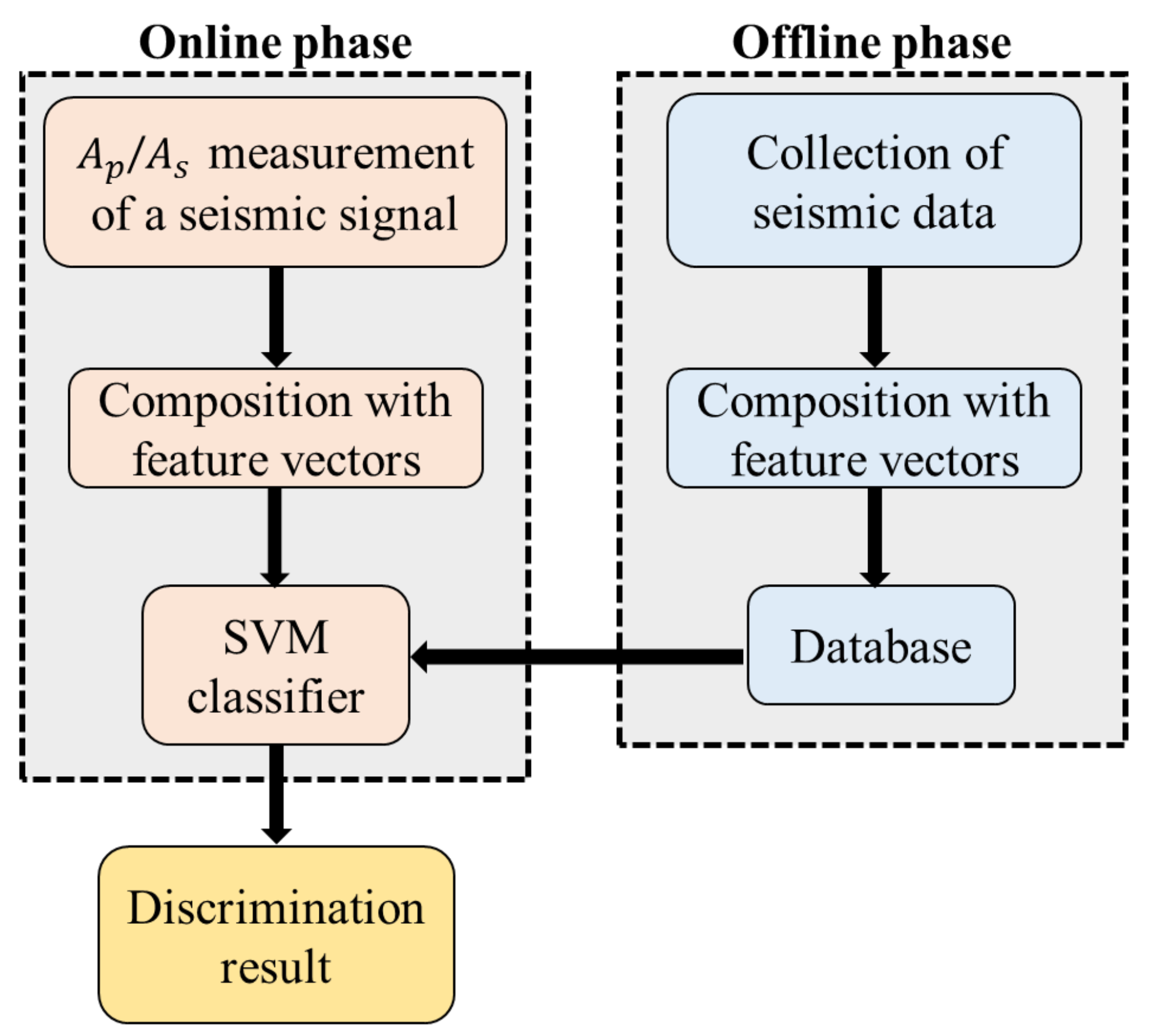
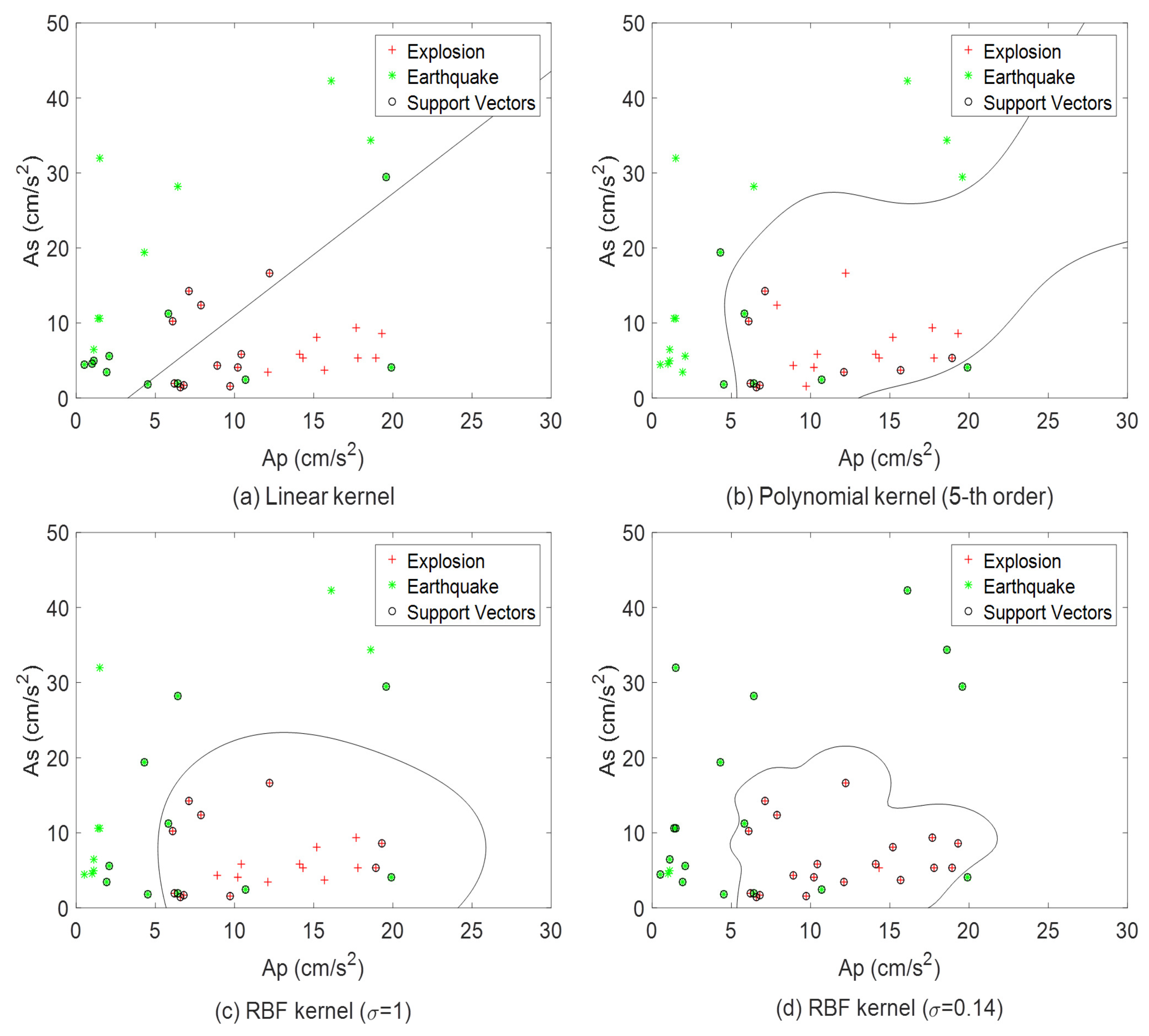
3. Seismic Signal Discrimination Using SVM
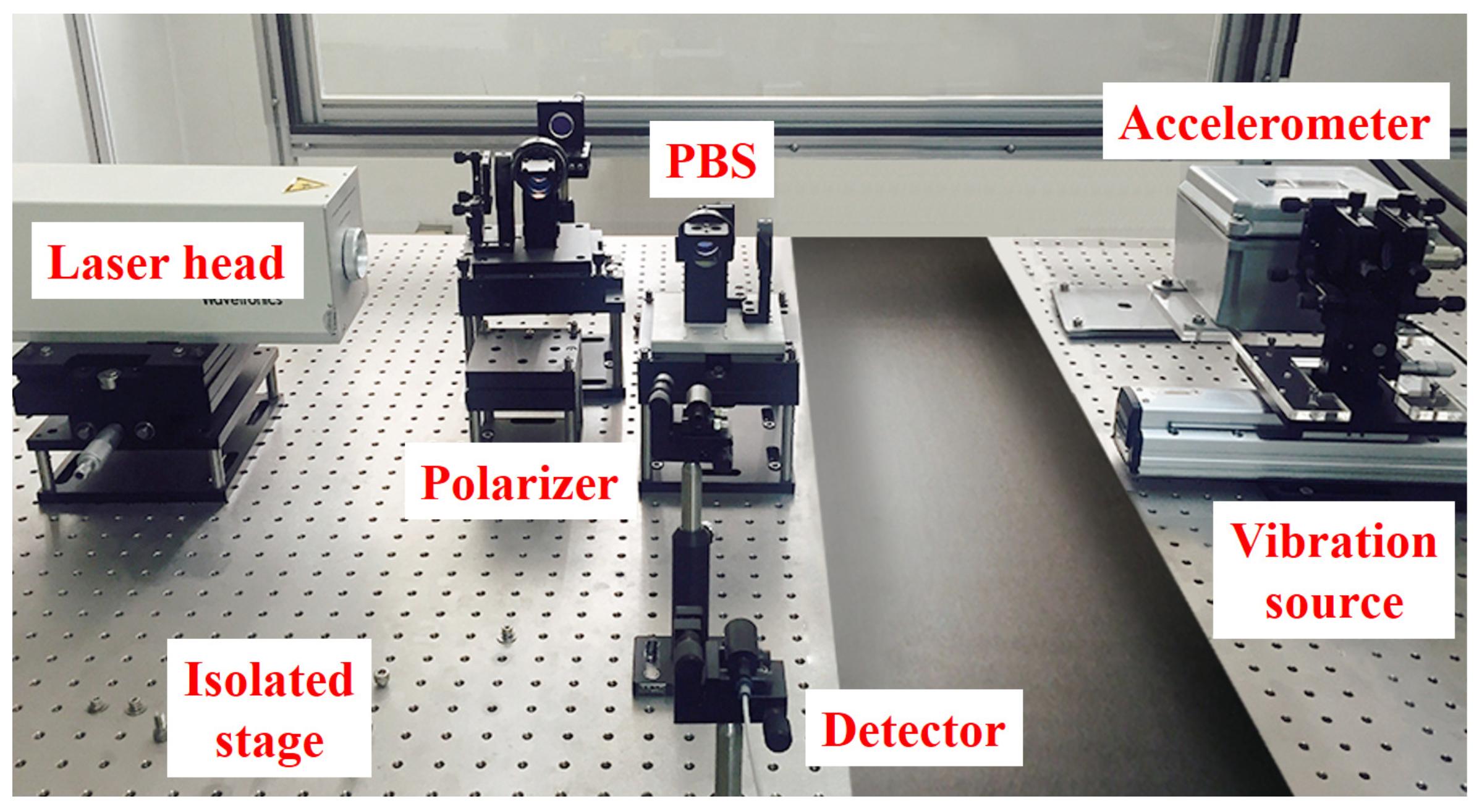
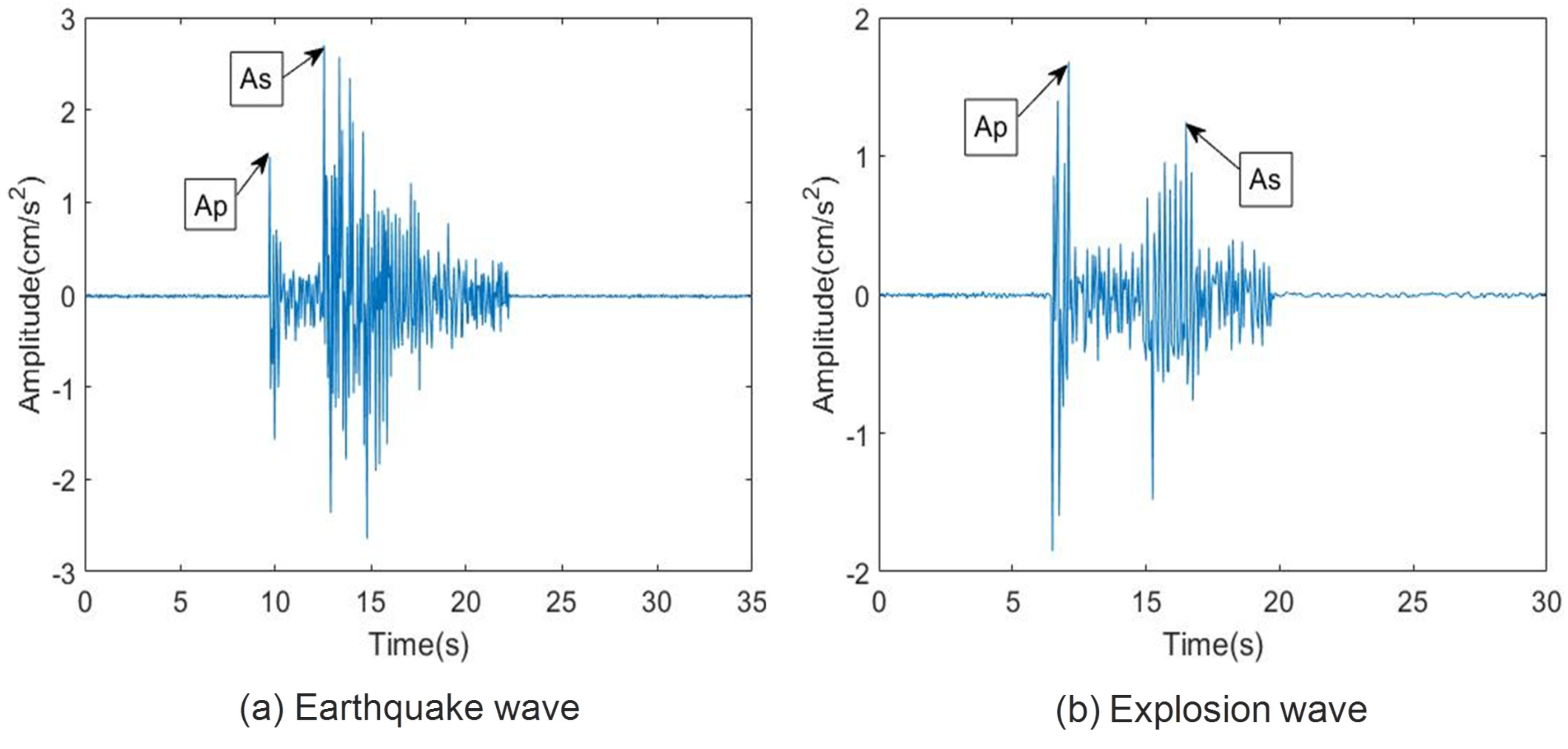
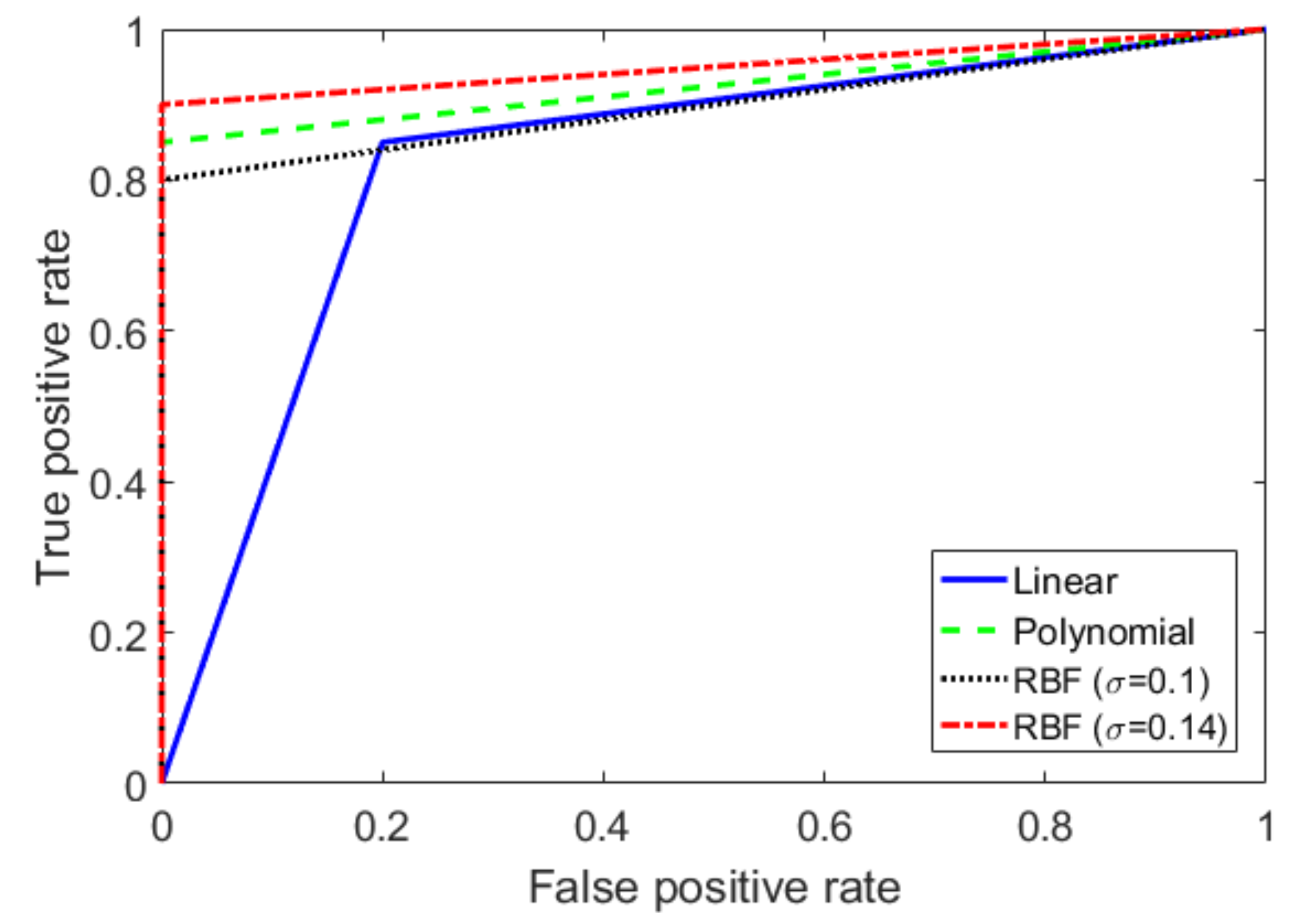
4. Simulation and Experiment for Seismic Event Discrimination
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Yildirim, E.; Gulbag, A.; Horasan, G.; Dogan, E. Discrimination of quarry blasts and earthquakes in the vicinity of Istanbul using soft computing techniques. Comput. Geosci. 2011, 37, 1209–1217. [Google Scholar] [CrossRef]
- Mousavi, S.; Horton, S.; Langston, C.; Samei, B. Seismic features and automatic discrimination of deep and shallow induced-microearthquakes using neural network and logisticregression. Geophys. J. Int. 2016, 207, 29–46. [Google Scholar] [CrossRef]
- Rabin, N.; Bregman, Y.; Lindenbaum, O.; Ben-Horin, Y.; Averbuch, A. Earthquake-explosion discrimination using diffusion maps. Geophys. J. Int. 2016, 207, 1484–1492. [Google Scholar] [CrossRef]
- Linville, L.; Pankow, K.; Draelos, T. Deep learning models augment analyst decisions for event discrimination. Geophys. Res. Lett. 2019, 46, 3643–3651. [Google Scholar] [CrossRef]
- Kuyuk, H.; Yildirim, E.; Dogan, E.; Horasan, G. An unsupervised learning algorithm: Application to the discrimination of seismic events and quarry blasts in the vicinity of Istanbul. Nat. Hazards Earth Syst. Sci. 2011, 11, 93–100. [Google Scholar] [CrossRef]
- Dong, L.; Li, X.; Xie, G. Nonlinear methodologies for identifying seismic event and nuclear explosion using random forest, support vector machine, and naive Bayes classification. Abstr. Appl. Anal. 2014, 459137. [Google Scholar] [CrossRef]
- Shang, X.; Li, X.; Morales-Esteban, A.; Chen, G. Improving microseismic event and quarry blast classification using artificial neural networks based on principal component analysis. Soil Dyn. Earthq. Eng. 2017, 99, 142–149. [Google Scholar] [CrossRef]
- Jang, Y.; Kim, S. Compensation of the refractive index of air in laser interferometer for distance meansurement: a review. Int. J. Precis. Eng. Man. 2017, 18, 1881–1890. [Google Scholar] [CrossRef]
- Lee, K.; Oh, J.; Lee, H.; You, K. Earthquake magnitude estimation using a total noise enhanced optimization model. Sensors 2019, 19, 1454. [Google Scholar] [CrossRef]
- Lee, K.; Kwon, H.; You, K. Laser-interferometric broadband seismometer for epicenter location estimation. Sensors 2017, 17, 2423. [Google Scholar] [CrossRef]
- Fu, H.; Hu, P.; Tan, J.; Fan, Z. Nonlinear errors induced by intermomulation in heterodyne laser interferometers. Opt. Lett. 2017, 42, 427–430. [Google Scholar] [CrossRef] [PubMed]
- Zing, X.; Chang, D.; Hu, P.; Tan, J. Spatially separated heterodyne grating interferometer for eliminating periodic nonlinear errors. Opt. Express 2017, 25, 31384–31393. [Google Scholar]
- Fu, H.; Ji, R.; Hu, P.; Wang, Y.; Wu, G.; Tan, J. Measurement method for nonlinearity in heterodyne laser interferometers based on double-channel quadrature demodulation. Sensors 2018, 18, 2768. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Fu, P.; Gao, R. Machine vision intelligence for product defect inspection based on deep learning and Hough transform. J. Manuf. Syst. 2019, 51, 52–60. [Google Scholar] [CrossRef]
- Liu, W.; Zhang, Z.; Li, S.; Tao, D. Road detection by using a generalized Hough transform. Remote Sens. 2017, 9, 590. [Google Scholar] [CrossRef]
- Liu, H.; Pang, L.; Li, F.; Guo, Z. Hough transform and clustering for a 3-D building reconstruction with tomographic SAR point clouds. Sensors 2019, 19, 5378. [Google Scholar] [CrossRef] [PubMed]
- Pasyanos, M.; Walter, W. Improvements to regional explosion identification using attenuation models of the lithosphere. Geophys. Res. Lett. 2009, 36, L14304. [Google Scholar] [CrossRef]
- Mariani, M.; Conzalez-Huizar, H.; Bhuiyan, M.; Tweneboah, O. Using dynamic Fourier analysis to discriminate between seismic signals from natural earthquakes and mining explosions. AIMS Geosci. 2017, 3, 438–449. [Google Scholar] [CrossRef]
- Telesca, L.; Lovallo, M.; Kiszely, M.; Toth, L. Discriminating quarry blasts from earthquakes in Vértes Hills (Hungary) by using the Fisher-Shannon method. Acta Geophys. 2011, 59, 858–871. [Google Scholar] [CrossRef]
- Kiszely, M. Discriminating of small earthquakes from quarry-blasts in the Vertes Hills, Hungary using complex analysis. Acta Geod. Geoph. Hung. 2009, 44, 227–244. [Google Scholar] [CrossRef]
- Akkar, S.; Sandikkaya, M.; Ay, B. Compatible ground-motion prediction equations for damping scaling factors and vertical-to-horizontal spectral amplitude ratios for the broader European region. Bull. Earthq. Eng. 2014, 12, 517–547. [Google Scholar] [CrossRef]
- Yan, X.; Jia, M. A novel optimized SVM classification algorithm with multi-domain feature and its application to fault diagnosis of rolling bearing. Neurocomputing 2018, 313, 47–64. [Google Scholar] [CrossRef]
- Aburomman, A.; Reaz, M. A novel SVM-kNN-PSO ensemble method for intrusion detection system. Appl. Soft Comput. 2016, 38, 360–372. [Google Scholar] [CrossRef]
- Liu, P.; Choo, K.; Wang, L.; Huang, F. SVM or deep learning? A comparative study on remote sensing image classification. Soft Comput. 2017, 21, 7053–7065. [Google Scholar] [CrossRef]
- Jahn, J. Karush-Kuhn-Tucker Conditions in Set Optimization. J. Optim. Theory Appl. 2017, 172, 707–725. [Google Scholar] [CrossRef]
- Jean, K.; Delga, G.; Ndiaye, B.; Traore, M. Algorithms for asymptotically exact minimization in Karush-Kuhn-Tucker methods. J. Math. Res. 2018, 10, 36–54. [Google Scholar] [CrossRef][Green Version]
- Nanda, M.; Seminar, K.; Nandika, D.; Maddu, A. A comparison study of kernel functions in the support vector machine and its application for termite detection. Information 2018, 9, 5. [Google Scholar] [CrossRef]
- Goncalves, L.; Subtil, A.; Oliveira, M.; Bermudez, P. Roc curve estimation: An overview. REVSTAT-Stat. J. 2014, 12, 1–20. [Google Scholar]
- Goksuluk, D.; Korkmaz, S.; Zararsiz, G.; Karaagaoglu, A. EasyROC: An interactive web-tool for ROC curve analysis using R language environment. R J. 2016, 8, 213–230. [Google Scholar] [CrossRef]
- Ahmad, M.; Aftab, S. Analyzing the performance of SVM for polarity detection with different datasets. Int. J. Mod. Educ. Comput. Sci. 2017, 9, 29–36. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Machine Learning Model | Precision | Recall | AUC |
|---|---|---|---|
| Linear kernel SVM | 0.78 | 0.85 | 0.83 |
| 5-th order polynomial SVM | 1.00 | 0.85 | 0.93 |
| RBF kernel SVM () | 1.00 | 0.80 | 0.90 |
| RBF kernel SVM () | 1.00 | 0.90 | 0.95 |
| Measurement Method | Precision | Recall | AUC |
|---|---|---|---|
| Linear (accelerometer) | 0.81 | 0.65 | 0.70 |
| Linear (laser interferometer) | 0.75 | 0.75 | 0.75 |
| Linear (laser interferometer+Hough) | 0.78 | 0.85 | 0.83 |
| RBF with (accelerometer) | 0.86 | 0.80 | 0.83 |
| RBF with (laser interferometer) | 0.96 | 0.85 | 0.90 |
| RBF with (laser interferometer+Hough) | 1.00 | 0.90 | 0.95 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.; Lee, K.; You, K. Seismic Discrimination between Earthquakes and Explosions Using Support Vector Machine. Sensors 2020, 20, 1879. https://doi.org/10.3390/s20071879
Kim S, Lee K, You K. Seismic Discrimination between Earthquakes and Explosions Using Support Vector Machine. Sensors. 2020; 20(7):1879. https://doi.org/10.3390/s20071879
Chicago/Turabian StyleKim, Sangkyeum, Kyunghyun Lee, and Kwanho You. 2020. "Seismic Discrimination between Earthquakes and Explosions Using Support Vector Machine" Sensors 20, no. 7: 1879. https://doi.org/10.3390/s20071879
APA StyleKim, S., Lee, K., & You, K. (2020). Seismic Discrimination between Earthquakes and Explosions Using Support Vector Machine. Sensors, 20(7), 1879. https://doi.org/10.3390/s20071879