In-Situ Measurement of Electrical-Heating-Induced Magnetic Field for an Atomic Magnetometer

 ,
, 
Abstract
1. Introduction
2. Method
3. Experimental Setup and Procedure
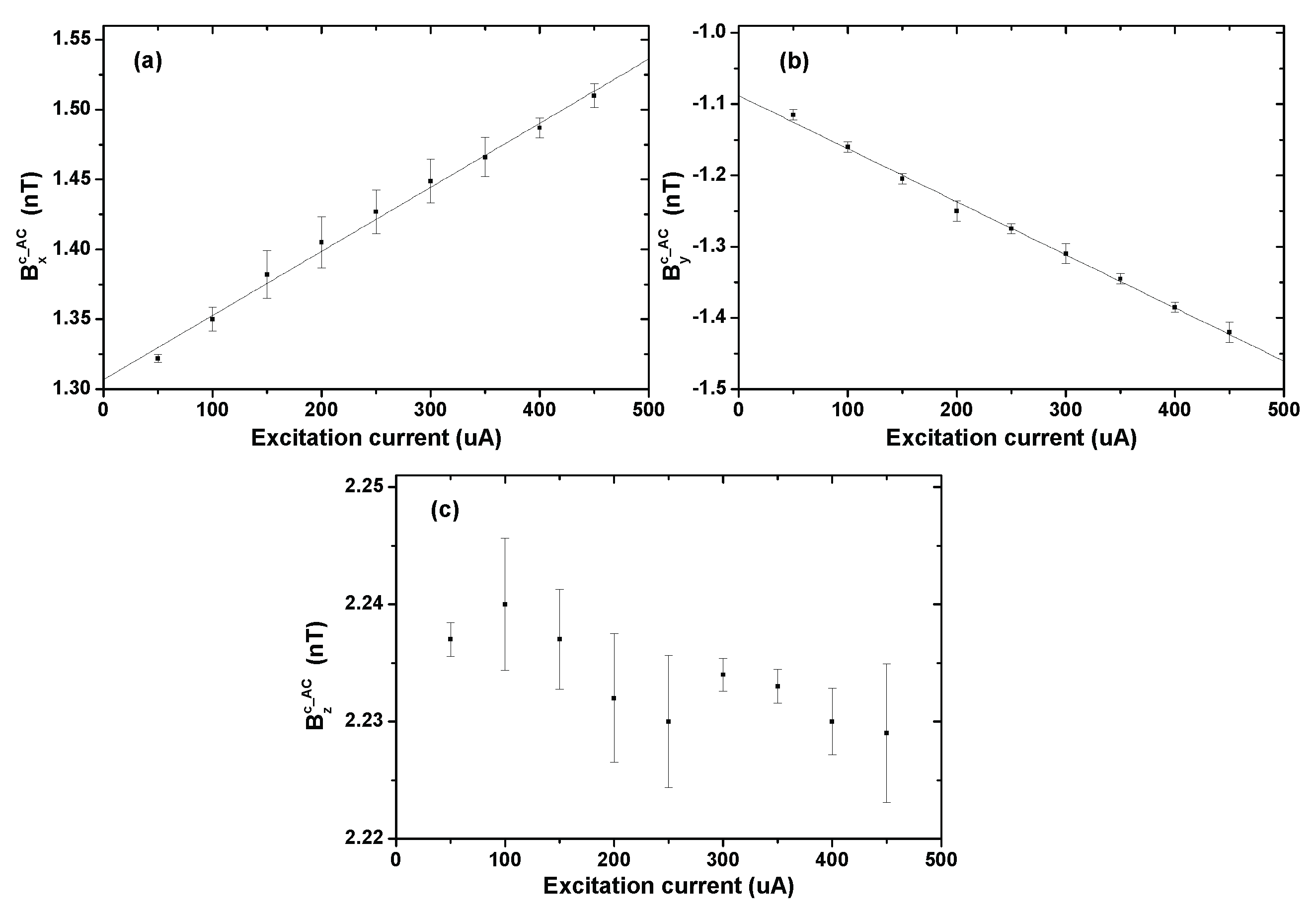
4. Experimental Results and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Boto, E.; Holmes, N.; Leggett, J.; Roberts, G.; Shah, V.; Meyer, S.S.; Muñoz, L.D.; Mullinger, K.J.; Tierney, T.M.; Bestmann, S.; et al. Moving magnetoencephalography towards real-world applications with a wearable system. Nature 2018, 555, 657–661. [Google Scholar] [CrossRef] [PubMed]
- Kitching, J. Chip-scale atomic devices. Appl. Phys. Rev. 2018, 5, 031302. [Google Scholar] [CrossRef]
- Zhang, G.; Huang, S.; Xu, F.; Hu, Z.; Lin, Q. Multi-channel spin exchange relaxation free magnetometer towards two-dimensional vector magnetoencephalography. Opt. Express 2019, 27, 597–607. [Google Scholar] [CrossRef] [PubMed]
- Alem, O.; Sander, T.H.; Mhaskar, R.; LeBlanc, J.; Eswaran, H.; Steinhoff, U.; Okada, Y.; Kitching, J.; Trahms, L.; Knappe, S. Fetal magnetocardiography measurements with an array of microfabricated optically pumped magnetometers. Phys. Med. Biol. 2015, 60, 4797–4811. [Google Scholar] [CrossRef] [PubMed]
- Lembke, G.; Erné, S.N.; Nowak, H.; Menhorn, B.; Pasquarelli, A. Optical multichannel room temperature magnetic field imaging system for clinical application. Biomed. Opt. Express 2014, 5, 876–881. [Google Scholar] [CrossRef] [PubMed]
- Borna, A.; Carter, T.R.; DeRego, P.; James, C.D.; Schwindt, P.D.D. Magnetic source imaging using a pulsed optically pumped magnetometer Array. IEEE Trans. Instrum. Meas. 2019, 68, 493–501. [Google Scholar] [CrossRef]
- Safronova, M.S.; Budker, D.; DeMille, D.; Kimball, D.F.J.; Derevianko, A.; Clark, C.W. Search for new physics with atoms and molecules. Rev. Mod. Phys. 2018, 90, 025008. [Google Scholar] [CrossRef]
- Wang, T.; Kimball, D.F.J.; Sushkov, A.O.; Aybas, D.; Blanchard, J.W.; Centers, G.; O’Kelley, S.R.; Wickenbrock, A.; Fang, J.; Budker, D. Application of spin-exchange relaxation-free magnetometry to the cosmic axion spin precession experiment. Phys. Dark. Universe 2018, 19, 27–35. [Google Scholar] [CrossRef]
- Dang, H.B.; Maloof, A.C.; Romalis, M.V. Ultrahigh sensitivity magnetic field and magnetization measurements with an atomic magnetometer. Appl. Phys. Lett. 2010, 97, 151110. [Google Scholar] [CrossRef]
- Allred, J.C.; Lyman, R.N.; Kornack, T.W.; Romalis, M.V. High-sensitivity atomic magnetometer unaffected by spin-exchange relaxation. Phys. Rev. Lett. 2002, 89, 130801. [Google Scholar] [CrossRef]
- Fang, J.; Li, R.; Duan, L.; Chen, Y.; Quan, W. Study of the operation temperature in the spin-exchange relaxation free magnetometer. Rev. Sci. Instrum. 2015, 86, 073116. [Google Scholar] [CrossRef] [PubMed]
- Ito, S.; Ito, Y.; Kobayashi, T. Temperature characteristics of K-Rb hybrid optically pumped magnetometers with different density ratios. Opt. Express 2019, 27, 8037–8047. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Liu, X.; Cai, H.; Ding, M.; Fang, J. The optimization of alkali-metal density ratio in hybrid optical pumping atomic magnetometer. Meas. Sci. Technol. 2019, 30, 015005. [Google Scholar] [CrossRef]
- Sheng, J.; Wan, S.; Sun, Y.; Dou, R.; Guo, Y.; Wei, K.; He, K.; Qin, J.; Gao, J. Magnetoencephalography with a Cs-based high-sensitivity compact atomic magnetometer. Rev. Sci. Instrum. 2017, 88, 094304. [Google Scholar] [CrossRef] [PubMed]
- Kominis, I.K.; Kornack, T.W.; Allred, J.C.; Romalis, M.V. A subfemtotesla multichannel atomic magnetometer. Nature 2003, 422, 596–599. [Google Scholar] [CrossRef]
- Ledbetter, M.P.; Savukov, I.M.; Acosta, V.M.; Budker, D.; Romalis, M.V. Spin-exchange-relaxation-free magnetometry with Cs vapor. Phys. Rev. A 2008, 77, 033408. [Google Scholar] [CrossRef]
- Li, Z.; Wakai, R.T.; Walker, T.G. Parametric modulation of an atomic magnetometer. Appl. Phys. Lett. 2006, 89, 134105. [Google Scholar] [CrossRef]
- Taue, S.; Sugihara, Y.; Kobayashi, T.; Ichihara, S.; Ishikawa, K.; Mizutani, N. Development of a highly sensitive optically pumped atomic magnetometer for biomagnetic field measurements: A phantom study. IEEE Trans. Magn. 2010, 46, 3635–3638. [Google Scholar] [CrossRef]
- Sheng, D.; Perry, A.R.; Krzyzewski, S.P.; Geller, S.; Kitching, J.; Knappe, S. A microfabricated optically-pumped magnetic gradiometer. Appl. Phys. Lett. 2017, 110, 031106. [Google Scholar] [CrossRef]
- Alem, O.; Mhaskar, R.; Jiménez-Martínez, R.; Sheng, D.; LeBlanc, J.; Trahms, L.; Sander, T.; Kitching, J.; Knappe, S. Magnetic field imaging with microfabricated optically-pumped magnetometers. Opt. Express 2017, 25, 7849–7858. [Google Scholar] [CrossRef]
- Savukov, I.; Boshier, M. A high-sensitivity tunable two-beam fiber-coupled high-density magnetometer with laser heating. Sensors 2016, 16, 1691. [Google Scholar] [CrossRef] [PubMed]
- Budker, D.; Kimball, D.F.J. Optical Magnetometry; Cambridge University Press: Cambridge, MA, USA, 2013; pp. 97–98. [Google Scholar]
- Lu, J.; Quan, W.; Ding, M.; Qi, L.; Fang, J. Suppression of light shift for high-density alkali-metal atomic magnetometer. IEEE Sen. J. 2019, 19, 492–496. [Google Scholar] [CrossRef]
- Zhao, J.; Ding, M.; Lu, J.; Yang, K.; Ma, D.; Yao, H.; Han, B.; Liu, G. Determination of spin polarization in spin-exchange relaxation-free atomic magnetometer using transient response. IEEE Trans. Instrum. Meas. 2020, 69, 845–852. [Google Scholar] [CrossRef]
- Fu, J.; Du, P.; Zhou, Q.; Wang, R. Spin dynamics of the potassium magnetometer in spin-exchange relaxation free regime. Chin. Phys. B 2016, 25, 010302. [Google Scholar] [CrossRef]
- Lu, J.; Qian, Z.; Fang, J.; Quan, W. Effects of AC magnetic field on spin-exchange relaxation of atomic magnetometer. Appl. Phys. BLasersOpt. 2016, 122, 59. [Google Scholar] [CrossRef]
- Wyllie, R.; Kauer, M.; Smetana, G.; Wakai, R.; Walker, T. Magnetocardiography with a modular spin-exchange relaxation-free atomic magnetometer array. Phys. Med. Biol. 2012, 57, 2619–2632. [Google Scholar] [CrossRef]
- Savukov, I.M.; Zotev, V.S.; Volegov, P.L.; Espy, M.A.; Matlashov, A.N.; Gomez, J.J.; Kraus, R.H., Jr. MRI with an atomic magnetometer suitable for practical imaging applications. J. Magn. Reson. 2009, 199, 188–191. [Google Scholar] [CrossRef]
- Karaulanov, T.; Savukov, I.; Kim, Y.J. Spin-exchange relaxation-free magnetometer with nearly parallel pump and probe beams. Meas. Sci. Technol. 2016, 27, 055002. [Google Scholar] [CrossRef]
- Brown, J.M. A New Limit on Lorentz-and CPT-Violating Neutron Spin Interactions Using a K-3He Comagnetometer. Ph.D. Dissertation, Department of Physics, Princeton University, Princeton, NJ, USA, 2011. [Google Scholar]
- Bulatowicz, M. Electrical Resistive Heaters for Magnetically Sensitive Instruments. In Proceedings of the 45th Annual Meeting of the APS Division of Atomic, Molecular and Optical Physics, Madison, WI, USA, 2–6 June 2014. [Google Scholar]
- Yim, S.H.; Kim, Z.; Lee, S.; Kim, T.H.; Shim, K.M. Note: Double-layered polyimide film heater with low magnetic field generation. Rev. Sci. Instrum. 2018, 89, 116102. [Google Scholar] [CrossRef]
- Liang, X.; Liu, Z.; Hu, D.; Wu, W.; Jia, Y.; Fang, J. MEMS non-magnetic electric heating chip for spin-exchange-relaxation-free (SERF) magnetometer. IEEE Access 2019, 7, 88461–88471. [Google Scholar]
- Seltzer, S.J. Developments in Alkali-Metal Atomic Magnetometry. Ph.D. Thesis, Department of Physics, Princeton University, Princeton, NJ, USA, 2008. [Google Scholar]
- Seltzer, S.J.; Romalis, M.V. Unshielded three-axis vector operation of a spin-exchange-relaxation-free atomic magnetometer. Appl. Phys. Lett. 2004, 85, 4804–4806. [Google Scholar] [CrossRef]
- Kirschvink, J. Uniform magnetic fields and double-wrapped coil systems: Improved techniques for the design of bioelectromagnetic experiments. Bioelectromagnetics 1992, 13, 401–411. [Google Scholar] [CrossRef] [PubMed]
- Jeon, S.; Jang, G.; Choi, H.; Park, S. Magnetic navigation system with gradient and uniform saddle coils for the wireless manipulation of micro-robots in human blood vessels. IEEE Trans. Magn. 2010, 46, 1943–1946. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Temperature (C) | (nT) | (nT) | (nT) | (nT) | (nT) | (nT) |
|---|---|---|---|---|---|---|
| 150 | 1.35 ± 0.01 | −1.18 ± 0.20 | −2.19 ± 0.01 | 18.94 ± 0.15 | 12.4 ± 0.8 | 22.00 ± 0.35 |
| 160 | 1.35 ± 0.01 | −1.12 ± 0.22 | −2.23 ± 0.01 | 20.34 ± 0.17 | 13.2 ± 0.8 | 23.15 ± 0.30 |
| 170 | 1.35 ± 0.01 | −1.16 ± 0.22 | −2.14 ± 0.01 | 21.14 ± 0.16 | 14.0 ± 0.6 | 24.21 ± 0.27 |
| 180 | 1.35 ± 0.01 | −1.12 ± 0.20 | −2.27 ± 0.01 | 21.54 ± 0.18 | 14.8 ± 0.6 | 25.10 ± 0.25 |
| 190 | 1.34 ± 0.01 | −1.12 ± 0.20 | −2.28 ± 0.01 | 22.74 ± 0.19 | 15.1 ± 0.5 | 25.98 ± 0.25 |
| Temperature (C) | Driving Voltage (V) | Driving Current (mA) | (nT) | (nT) | (nT) |
|---|---|---|---|---|---|
| 150 | 26.53 | 232 | 17.59 ± 0.16 | 13.6 ± 1.0 | 24.19 ± 0.36 |
| 160 | 28.12 | 246 | 18.99 ± 0.18 | 14.3 ± 1.0 | 25.38 ± 0.31 |
| 170 | 29.29 | 256 | 19.79 ± 0.17 | 15.2 ± 0.8 | 26.45 ± 0.28 |
| 180 | 20.49 | 267 | 20.19 ± 0.19 | 15.8 ± 0.8 | 27.37 ± 0.26 |
| 190 | 31.84 | 278 | 21.41 ± 0.20 | 16.2 ± 0.7 | 28.26 ± 0.26 |
| Case | a (nT/mA) | b (nT) |
|---|---|---|
| 0.079 | −0.51 | |
| 0.060 | −0.21 | |
| 0.090 | 3.25 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, J.; Wang, J.; Yang, K.; Zhao, J.; Quan, W.; Han, B.; Ding, M. In-Situ Measurement of Electrical-Heating-Induced Magnetic Field for an Atomic Magnetometer. Sensors 2020, 20, 1826. https://doi.org/10.3390/s20071826
Lu J, Wang J, Yang K, Zhao J, Quan W, Han B, Ding M. In-Situ Measurement of Electrical-Heating-Induced Magnetic Field for an Atomic Magnetometer. Sensors. 2020; 20(7):1826. https://doi.org/10.3390/s20071826
Chicago/Turabian StyleLu, Jixi, Jing Wang, Ke Yang, Junpeng Zhao, Wei Quan, Bangcheng Han, and Ming Ding. 2020. "In-Situ Measurement of Electrical-Heating-Induced Magnetic Field for an Atomic Magnetometer" Sensors 20, no. 7: 1826. https://doi.org/10.3390/s20071826
APA StyleLu, J., Wang, J., Yang, K., Zhao, J., Quan, W., Han, B., & Ding, M. (2020). In-Situ Measurement of Electrical-Heating-Induced Magnetic Field for an Atomic Magnetometer. Sensors, 20(7), 1826. https://doi.org/10.3390/s20071826