Design of a Measuring System for Electricity Quality Monitoring within the SMART Street Lighting Test Polygon: Pilot Study on Adaptive Current Control Strategy for Three-Phase Shunt Active Power Filters

 , , , , , , , and
, , , , , , , and
Abstract
1. Introduction
2. Methods
2.1. Clarke Transformation
2.2. Notch Adaptive Filter
2.3. Notch Adaptive LMS Algorithm
- Calculation of the FIR filter output value:
- Calculation of the estimated error signal:
- Finally, the vector weight values and the corresponding to the FIR filter values are updated with respect to the following iteration,
2.4. Notch Adaptive RLS algorithm
- The filter output is calculated using filter weights from the previous iteration and the current input vector:
- The mean gain vector is calculated using the following equation.
- The value of the estimated error is calculated according to the following equation.
- The weights vector is updated using the following equation.
- The inverse matrix is calculated using the following equation.
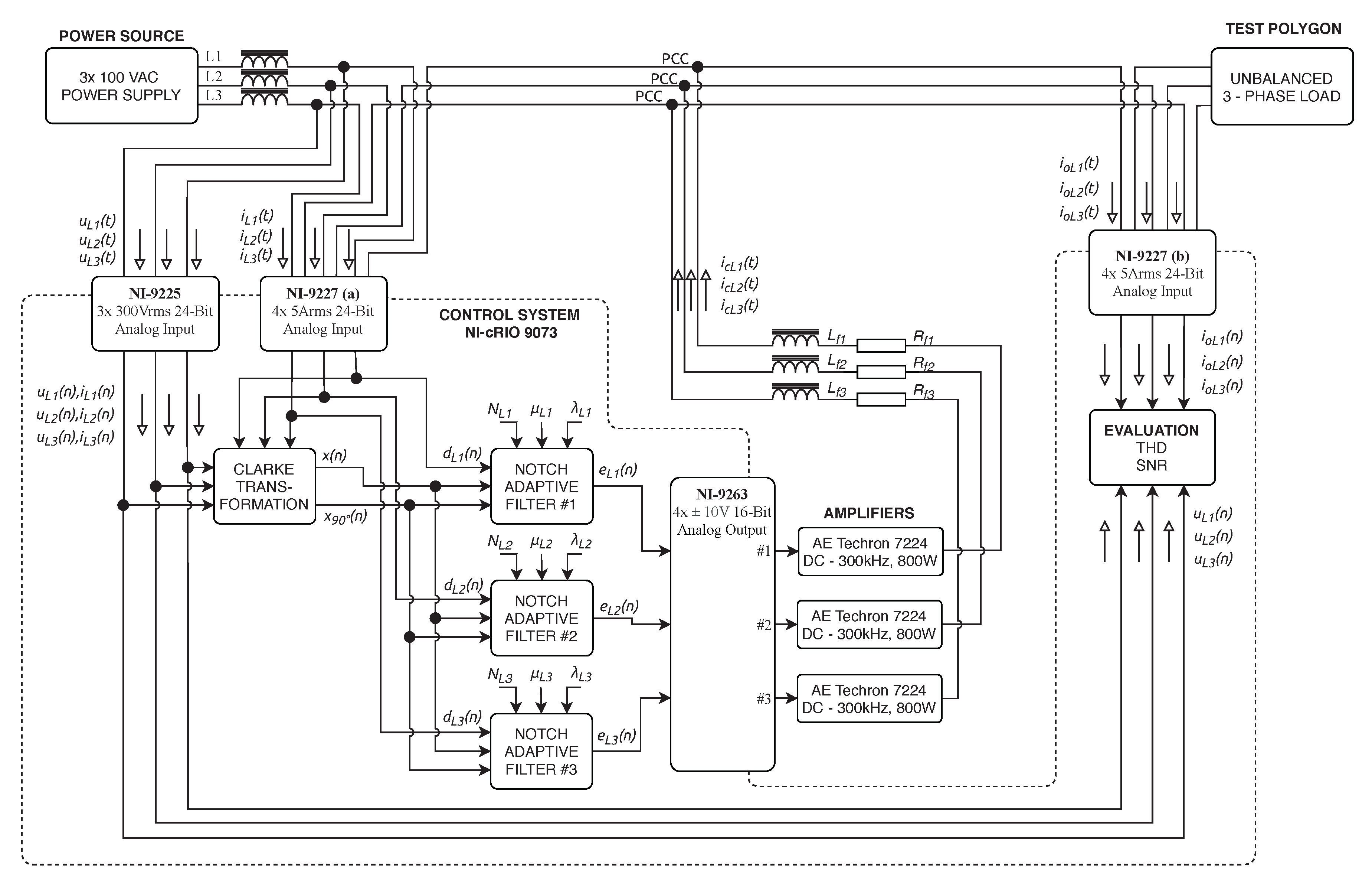
2.5. Three-Phase Shunt Active Power Filter
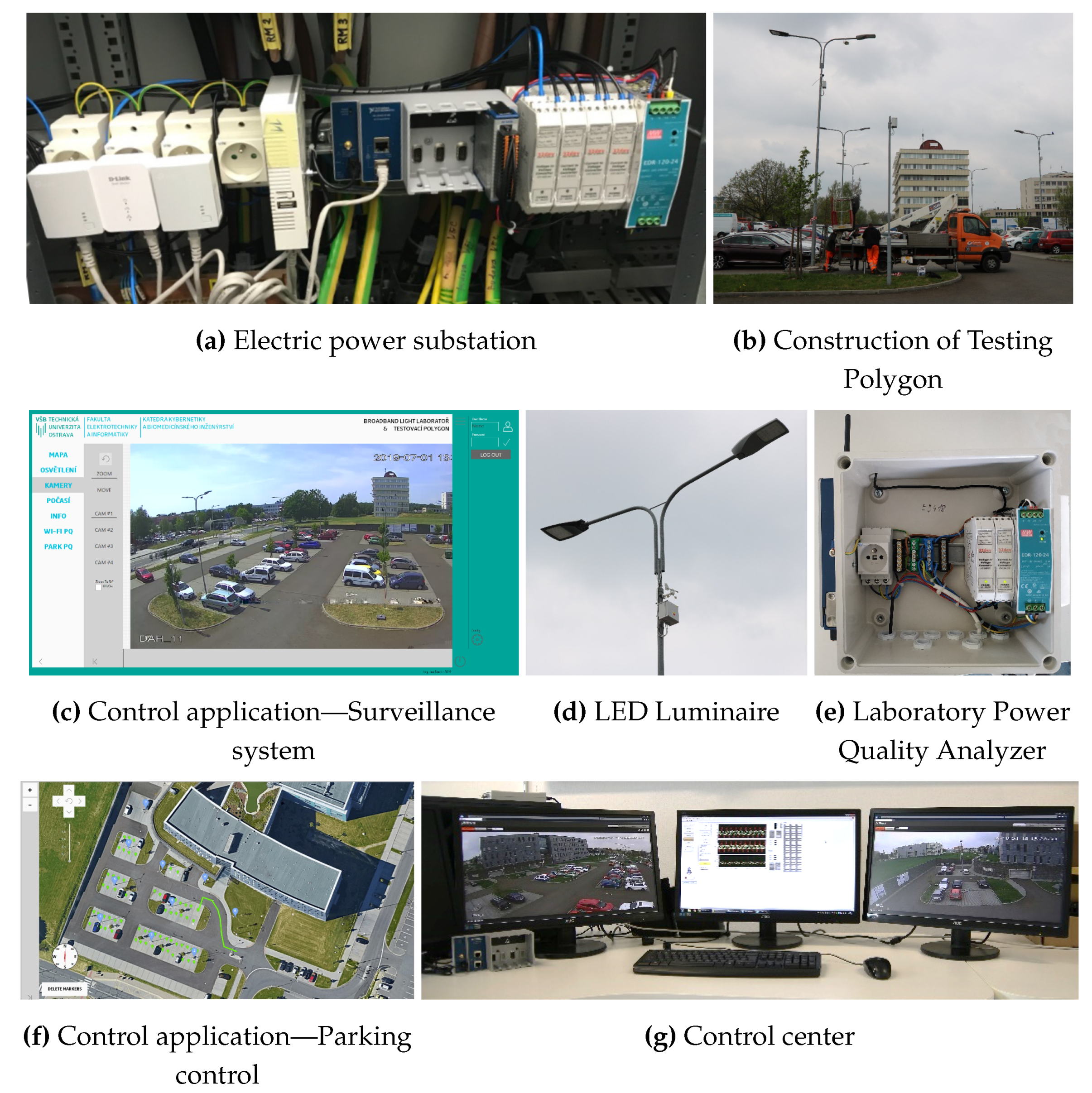
3. SMART BROADBAND Test Polygon
3.1. Luminaires in the Polygon
3.2. System for Measurement and Evaluation of Electrical Power Quality
3.3. Data Acquisition HW
3.4. Signal Conditioning Modules for Voltage and Current Signals
3.5. Server
3.6. Control Applications
4. Experiments
4.1. Comparison of Various Luminaries
- Because of the morning arrivals of people to work, as the polygon fills up, the individual lighting poles responds and light up to almost full power.
- Daily testing of the various components of the testing polygon.
- A similar scenario as A), but, in addition, the rising sun was taken into account—with gradually higher ambient light intensity, there was no need to illuminate at higher power.
- The consumption of SMART elements on the polygon is approximately 45W.
- In the case of no recorded event (passing car, pedestrian, etc.), SMART lighting operation is maintained at 60% of total power.
4.2. Filter Settings Optimization
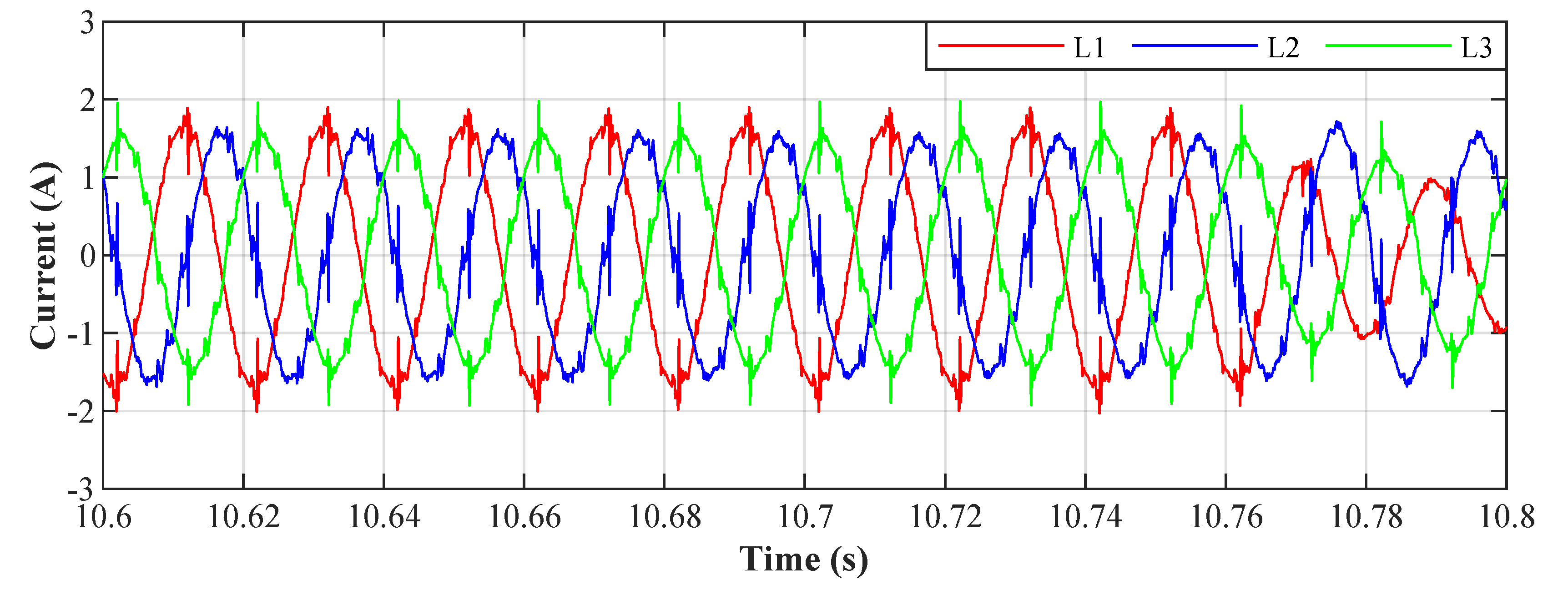
4.3. Laboratory Experiment
4.4. FPGA Experiment
4.5. Results
4.5.1. Total Harmonic Distortion
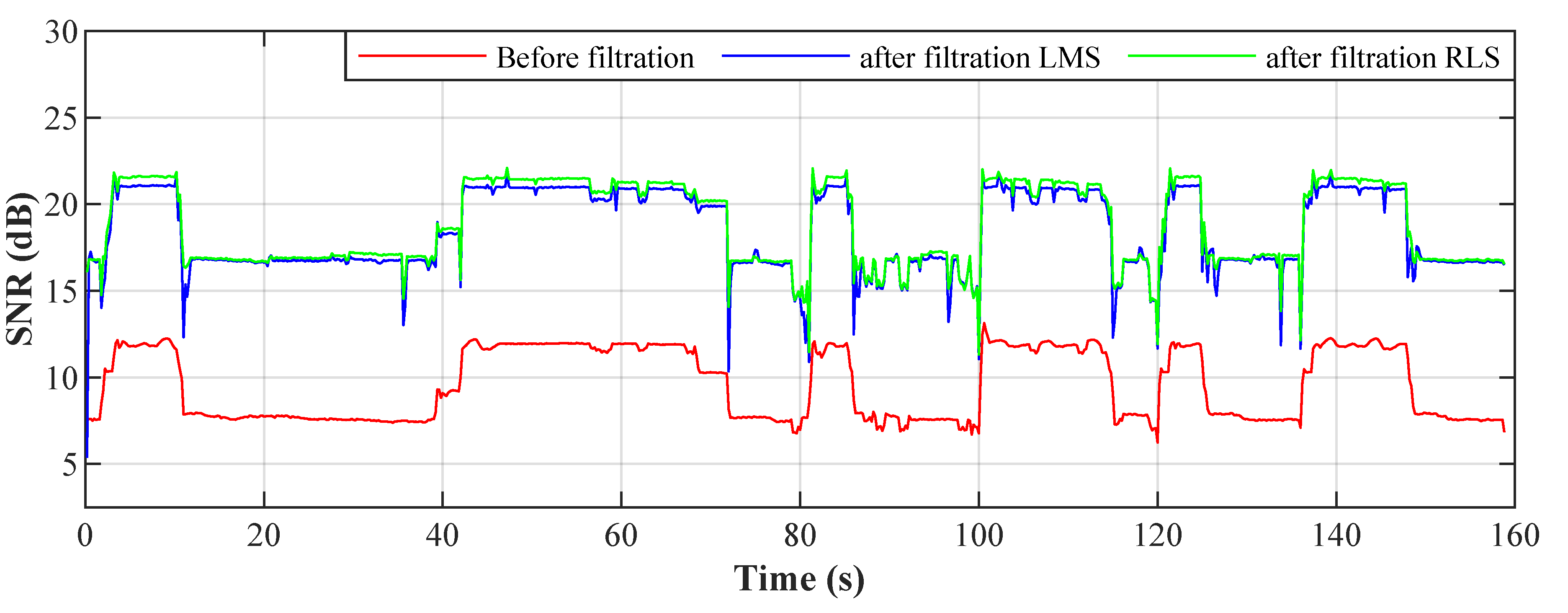
4.5.2. Signal-to-Noise Ratio
4.6. Implementation on FPGA
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dolara, A.; Faranda, R.; Guzzetti, S.; Leva, S. Power quality in public lighting systems. In Proceedings of the 14th International Conference on Harmonics and Quality of Power—ICHQP 2010, Bergamo, Italy, 26–29 September 2010; pp. 1–7. [Google Scholar] [CrossRef]
- Martirano, L. A smart lighting control to save energy. In Proceedings of the 6th IEEE International Conference on Intelligent Data Acquisition and Advanced Computing Systems, Prague, Czech Republic, 15–17 September 2011; pp. 132–138. [Google Scholar] [CrossRef]
- Novak, T.; Sokansky, K.; Koudelka, P.; Martinek, R. Implementation of smart technologies into cities and villages using elements of public lighting. Light 2017, 20, 46–52. [Google Scholar]
- National Energy Efficiency Action Plan of the Czech Republic; Ministry of Industry and Trade, Department of Energy Efficiency and Savings: Prague, Czech Republic, 2016.
- Cacciatore, G.; Fiandrino, C.; Kliazovich, D.; Granelli, F.; Bouvry, P. Cost analysis of smart lighting solutions for smart cities. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Half of the public lighting in the Czech Republic will have to undergo an overall renovation by 2025. Available online: https://ec.europa.eu/energy/sites/ener/files/ener-2017-00343-00-00-en-tra-00.pdf (accessed on 10 February 2020).
- Noshahr, J.B.; Meykhosh, M.H.; Kermani, M. Current harmonic losses resulting from first and second generation LED lights replacement with sodium vapor lights in a LV feeder. In Proceedings of the 2017 IEEE International Conference on Environment and Electrical Engineering and 2017 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Milan, Italy, 6–9 June 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Zak, P.; Vodrackova, S. Conception of public lighting. In Proceedings of the 2016 IEEE Lighting Conference of the Visegrad Countries (Lumen V4), Karpacz, Poland, 13–16 September 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Karawia, H.; Elhoseiny, M.; Mahmoud, M. Harmonic analysis for street lighting lamps. CIRED-Open Access Proc. J. 2017, 2017, 655–658. [Google Scholar] [CrossRef]
- Dolara, A.; Leva, S. Power Quality and Harmonic Analysis of End User Devices. Energies 2012, 5, 5453–5466. [Google Scholar] [CrossRef]
- Phannil, N.; Jettanasen, C.; Ngaopitakkul, A. Harmonics and Reduction of Energy Consumption in Lighting Systems by Using LED Lamps. Energies 2018, 11, 3169. [Google Scholar] [CrossRef]
- Qi, W.; Li, S.; Yuan, H.; Tan, S.C.; Hui, S.Y. High-Power-Density Single-Phase Three-Level Flying-Capacitor Buck PFC Rectifier. IEEE Trans. Power Electron. 2019, 34, 10833–10844. [Google Scholar] [CrossRef]
- Kolar, J.W.; Friedli, T. The Essence of Three-Phase PFC Rectifier Systems—Part I. IEEE Trans. Power Electron. 2013, 28, 176–198. [Google Scholar] [CrossRef]
- Friedli, T.; Hartmann, M.; Kolar, J.W. The Essence of Three-Phase PFC Rectifier Systems—Part II. IEEE Trans. Power Electron. 2014, 29, 543–560. [Google Scholar] [CrossRef]
- Bieliński, K.; Cieślik, S. Experimental Study of Higher Harmonics Content in Street Lighting System Current. Acta Energetica 2016, 2, 45–52. [Google Scholar] [CrossRef]
- Kuncicky, R.; Kolarik, J.; Soustek, L.; Kuncicky, L.; Martinek, R. IoT Approach to Street Lighting Control Using MQTT Protocol. In AETA 2018-Recent Advances in Electrical Engineering and Related Sciences: Theory and Application; Zelinka, I., Brandstetter, P., Trong Dao, T., Hoang Duy, V., Kim, S.B., Eds.; Springer International Publishing: Cham, Spain, 2020; Volume 554, pp. 429–438. [Google Scholar] [CrossRef]
- Sanjay, J.S.; Misra, B. Power Quality Improvement for Non Linear Load Applications using Passive Filters. In Proceedings of the 2019 3rd International Conference on Recent Developments in Control, Automation & Power Engineering (RDCAPE), Noida, India, 10–11 October 2019; pp. 585–589. [Google Scholar] [CrossRef]
- Martinek, R.; Rzidky, J.; Jaros, R.; Danys, L.; Baros, J.; Bilik, P. Shunt Active Power Filter Control Using Adaptive Algorithms NLMS and QR-RLS. Int J. Simul. Syst. Sci. Technol. 2019. [Google Scholar] [CrossRef]
- Martinek, R.; Danys, L.; Jaros, R. Visible Light Communication System Based on Software Defined Radio: Performance Study of Intelligent Transportation and Indoor Applications. Electronics 2019, 8, 433. [Google Scholar] [CrossRef]
- Danys, L.; Martinek, R.; Jaros, R.; Baros, J.; Bilik, P. Visible Light Communication System Based on Virtual Instrumentation. IFAC-PapersOnLine 2019, 52, 311–316. [Google Scholar] [CrossRef]
- Soustek, L.; Martinek, R.; Kuncicky, R.; Danys, L.; Baros, J. Possibilities of intelligent camera system based on virtual instrumentation: Technology of Broadband LIGHT for ’Smart City’ concept. IFAC-PapersOnLine 2019, 52, 170–174. [Google Scholar] [CrossRef]
- Baros, J.; Danys, L.; Jaros, R.; Martinek, R. Wireless Power Quality Analyser based on Virtual Instrumentation. IFAC-PapersOnLine 2019, 52, 465–472. [Google Scholar] [CrossRef]
- Baros, J.; Martinek, R.; Jaros, R.; Danys, L.; Soustek, L. Development of application for control of SMART parking lot. IFAC-PapersOnLine 2019, 52, 19–26. [Google Scholar] [CrossRef]
- Tsengenes, G.; Adamidis, G. An improved current control technique for the investigation of a power system with a shunt active filter. In Proceedings of the 2010 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM 2010), Pisa, Italy, 14–16 June 2010; pp. 239–244. [Google Scholar] [CrossRef]
- Wamane, S.S.; Baviskar, J.; Wagh, S.R. A Comparative Study on Compensating Current Generation Algorithms for Shunt Active Filter under Non-linear Load Conditions. Int. J. Sci. Res. Publ. 2013, 3, 1–6. [Google Scholar]
- Montero, M.I.M.; Cadaval, E.R.; Gonzalez, F.B. Comparison of Control Strategies for Shunt Active Power Filters in Three-Phase Four-Wire Systems. IEEE Trans. Power Electron. 2007, 22, 229–236. [Google Scholar] [CrossRef]
- Patel, P.J.; Patel, R.M.; Patel, V. Implementation of FFT Algorithm using DSP TMS320F28335 for Shunt Active Power Filter. J. Inst. Eng. India Ser. B. 2017, 98, 321–327. [Google Scholar] [CrossRef]
- Hrbac, R.; Mlcak, T.; Kolar, V. Improving Power Quality with the Use of a New Method of Serial Active Power Filter (SAPF) Control. Elektronika Elektrotechnika 2017, 23, 15–20. [Google Scholar] [CrossRef]
- Pigazo, A.; Moreno, V.M.; EstÉbanez, E.J. A Recursive Park Transformation to Improve the Performance of Synchronous Reference Frame Controllers in Shunt Active Power Filters. IEEE Trans. Power Electron. 2009, 24, 2065–2075. [Google Scholar] [CrossRef]
- Sabo, A.; Abdul Wahab, N.I.; Mohd Radzi, M.A.; Mailah, N.F. A modified artificial neural network (ANN) algorithm to control shunt active power filter (SAPF) for current harmonics reduction. In Proceedings of the 2013 IEEE Conference on Clean Energy and Technology (CEAT), Lankgkawi, Malaysia, 18–20 November 2013; pp. 348–352. [Google Scholar] [CrossRef]
- Martinek, R.; Vanus, J.; Kelnar, M.; Bilik, P. Control Methods of Active Power Filters Using Soft Computing Techniques. In Proceedings of the 8th International Scientific Symposium on Electrical Power Engineering (Elektroenergetika), Stara Lesna, Slovakia, 16–18 September 2015; p. 5. [Google Scholar]
- Akagi, H.; Kanazawa, Y.; Nabae, A. Instantaneous Reactive Power Compensators Comprising Switching Devices without Energy Storage Components. IEEE Trans. Ind. Appl. 1984, IA-20, 625–630. [Google Scholar] [CrossRef]
- Akagi, H.; Watanabe, E.H.; Aredes, M. Instantaneous Power Theory and Applications to Power Conditioning; Wiley-Interscience: Hoboken, NJ, USA, 2007. [Google Scholar]
- Kumar, P.; Mahajan, A. Soft Computing Techniques for the Control of an Active Power Filter. IEEE Trans. Power Deliv. 2009, 24, 452–461. [Google Scholar] [CrossRef]
- Zhao, H.J.; Pang, Y.F.; Qiu, Z.M.; Chen, M. Study on UPF Harmonic Current Detection Method Based on DSP. J. Phys. Conf. Ser. 2006, 48, 1327–1331. [Google Scholar] [CrossRef]
- Mercy, E.L.; Karthick, R.; Arumugam, S. A comparative performance analysis of four control algorithms for a three phase shunt active power filter. Int. J. Comput. Sci. Netw. Secur. 2010, 10, 1–7. [Google Scholar]
- Bajaj, M.; Rautela, S.; Sharma, A. A comparative analysis of control techniques of SAPF under source side disturbance. In Proceedings of the 2016 International Conference on Circuit, Power and Computing Technologies (ICCPCT), Nagercoil, India, 18–19 March 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Kabir, M.A.; Mahbub, U. Synchronous detection and digital control of Shunt Active Power Filter in power quality improvement. In Proceedings of the 2011 IEEE Power and Energy Conference, Urbana, IL, USA, 25–26 Febuary 2011; pp. 1–5. [Google Scholar] [CrossRef]
- Bhattacharya, S.; Divan, D. Synchronous frame based controller implementation for a hybrid series active filter system. In Proceedings of the IAS ’95. Conference Record of the 1995 IEEE Industry Applications Conference Thirtieth IAS Annual Meeting, Orlando, FL, USA, 8–12 October 1995; Voulme 3, pp. 2531–2540. [Google Scholar] [CrossRef]
- Karslı, V.M.; Tümay, M.; Süslüoğlu, B. An evaluation of time domain techniques for compensating currents of shunt active power filters. In Proceedings of the 11th International Conference on Electrical and Electronics Engineering, Bursa, Turkey, 28–30 November 2019; pp. 1–5. [Google Scholar]
- Martinek, R.; Rzidky, J.; Jaros, R.; Bilik, P.; Ladrova, M. Least Mean Squares and Recursive Least Squares Algorithms for Total Harmonic Distortion Reduction Using Shunt Active Power Filter Control. Energies 2019, 12, 1545. [Google Scholar] [CrossRef]
- Zhang, J.; Wen, H.; Teng, Z.; Martinek, R.; Bilik, P. Power System Dynamic Frequency Measurement Based on Novel Interpolated STFT Algorithm. Adv. Electr. Electron. Eng. 2017, 15, 365–375. [Google Scholar] [CrossRef]
- Zhang, J.; Tang, L.; Mingotti, A.; Peretto, L.; Wen, H. Analysis of White Noise on Power Frequency Estimation by DFT-based Frequency Shifting and Filtering Algorithm. IEEE Trans. Instrum. Meas. 2019, 1. [Google Scholar] [CrossRef]
- Zhang, J.; Wen, H.; Tang, L. Improved Smoothing Frequency Shifting and Filtering Algorithm for Harmonic Analysis With Systematic Error Compensation. IEEE Trans. Ind. Electron. 2019, 66, 9500–9509. [Google Scholar] [CrossRef]
- Wen, H.; Li, C.; Yao, W. Power System Frequency Estimation of Sine-Wave Corrupted With Noise by Windowed Three-Point Interpolated DFT. IEEE Trans. Smart Grid 2018, 9, 5163–5172. [Google Scholar] [CrossRef]
- Wen, H.; Zhang, J.; Meng, Z.; Guo, S.; Li, F.; Yang, Y. Harmonic Estimation Using Symmetrical Interpolation FFT Based on Triangular Self-Convolution Window. IEEE Trans. Ind. Inf. 2015, 11, 16–26. [Google Scholar] [CrossRef]
- Vo, H.H.; Brandstetter, P.; Tran, T.C.; Dong, C.S.T. An Implementation of Rotor Speed Observer for Sensorless Induction Motor Drive in Case of Machine Parameter Uncertainty. Adv. Electr. Electron. Eng. 2018, 16, 426–434. [Google Scholar] [CrossRef]
- Pereira, R.R.; da Silva, C.H.; da Silva, L.E.B.; Lambert-Torres, G.; Pinto, J.O.P. New Strategies for Application of Adaptive Filters in Active Power Filters. IEEE Trans. Ind. Appl. 2011, 47, 1136–1141. [Google Scholar] [CrossRef]
- Pereira, R.R.; da Silva, C.H.; Veloso, G.F.C.; da Silva, L.E.B.; Torres, G.L. A New Strategy to Step-Size Control of Adaptive Filters in the Harmonic Detection for Shunt Active Power Filter. In Proceedings of the 2009 IEEE Industry Applications Society Annual Meeting, Houston, TX, USA, 4–8 October 2009; pp. 1–5. [Google Scholar] [CrossRef]
- Chen, Y.; Kong, Q.; Qian, H.; Xing, S. Shunt Active Power Filter Using Average Power and RLS Self-adapting Algorithms. In Proceedings of the Sixth International Conference on Intelligent Systems Design and Applications, Jian, China, 16–18 October 2006; Voulme 2, pp. 25–30. [Google Scholar] [CrossRef]
- Garanayak, P.; Panda, G.; Ray, P.K. Harmonic estimation using RLS algorithm and elimination with improved current control technique based SAPF in a distribution network. Int. J. Electr. Power Energy Syst. 2015, 73, 209–217. [Google Scholar] [CrossRef]
- Tsengenes, G.; Adamidis, G. Shunt active power filter control using fuzzy logic controllers. In Proceedings of the 2011 IEEE International Symposium on Industrial Electronics, Gdansk, Poland, 27–30 June 2011; pp. 365–371. [Google Scholar] [CrossRef]
- Pedapenki, K.K.; Gupta, S.P.; Pathak, M.K. Comparison of PI & fuzzy logic controller for shunt active power filter. In Proceedings of the 2013 IEEE 8th International Conference on Industrial and Information Systems, Peradeniya, Sri Lanka, 17–20 December 2013; pp. 42–47. [Google Scholar] [CrossRef]
- Sahu, I.; Gadanayak, D.A. Comparison between two types of current control techniques applied to shunt active power filters and development of a novel fuzzy logic controller to improve SAPF performance. Int. J. Eng. Res. Dev. 2012, 2, 1–10. [Google Scholar]
- Bhattacharya, A.; Chakraborty, C. A Shunt Active Power Filter With Enhanced Performance Using ANN-Based Predictive and Adaptive Controllers. IEEE Trans. Ind. Electron. 2011, 58, 421–428. [Google Scholar] [CrossRef]
- Tey, L.; So, P.; Chu, Y. Improvement of Power Quality Using Adaptive Shunt Active Filter. IEEE Trans. Power Deliv. 2005, 20, 1558–1568. [Google Scholar] [CrossRef]
- Marks, J.; Green, T. Predictive transient-following control of shunt and series active power filters. IEEE Trans. Power Electron. 2002, 17, 574–584. [Google Scholar] [CrossRef]
- EL-Kholy, E.; EL-Sabbe, A.; El-Hefnawy, A.; Mharous, H.M. Three-phase active power filter based on current controlled voltage source inverter. Int. J. Electr. Power Energy Syst. 2006, 28, 537–547. [Google Scholar] [CrossRef]
- Lenwari, W.; Sumner, M.; Zanchetta, P. The Use of Genetic Algorithms for the Design of Resonant Compensators for Active Filters. IEEE Trans. Ind. Electron. 2009, 56, 2852–2861. [Google Scholar] [CrossRef]
- Mishra, S.; Bhende, C.N. Bacterial Foraging Technique-Based Optimized Active Power Filter for Load Compensation. IEEE Trans. Power Deliv. 2007, 22, 457–465. [Google Scholar] [CrossRef]
- Zanchetta, P.; Sumner, M.; Marinelli, M.; Cupertino, F. Experimental modeling and control design of shunt active power filters. Control Eng. Pract. 2009, 17, 1126–1135. [Google Scholar] [CrossRef]
- Benyamina, A.; Moulahoum, S.; Colak, I.; Bayindir, R. Hybrid fuzzy logic-artificial neural network controller for shunt active power filter. In Proceedings of the 2016 IEEE International Conference on Renewable Energy Research and Applications (ICRERA), Birmingham, UK, 20–23 November 2016; pp. 837–844. [Google Scholar] [CrossRef]
- Buła, D.; Pasko, M. Model of Hybrid Active Power Filter in the Frequency Domain. In Analysis and Simulation of Electrical and Computer Systems; Gołębiowski, L., Mazur, D., Eds.; Springer International Publishing: Cham, Spain, 2015. [Google Scholar] [CrossRef]
- Clarke and Inverse Clarke Transformations HardwareImplementation User Guide. Available online: https://www.microsemi.com/document-portal/doc_view/132801-clarke-and-inverse-clarke-transformations-hardware-implementation-user-guide (accessed on 10 February 2020).
- McCool, J.; Widrow, B. Principles and Applications of Adaptive Filters: A Tutorial Review; Defense Technical Information Center: Fort Belvoir, VA, USA, 1977.
- Pereira, R.R.; da Silva, C.H.; da Silva, L.E.B.; Lambert-Torres, G.; Pinto, J.O.P. Improving the convergence time of adaptive notch filters to harmonic detection. In Proceedings of the IECON 2010-36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010; pp. 521–525. [Google Scholar] [CrossRef]
- Wang, Y.; Teng, Z.; He, W.; Li, J.; Martinek, R. A State Evaluation Adaptive Differential Evolution Algorithm for FIR Filter Design. Adv. Electr. Electron. Eng. 2018, 15, 770–779. [Google Scholar] [CrossRef]
- Haykin, S.S.; Widrow, B. Least-Mean-Square Adaptive Filters; Wiley-Interscience: Hoboken, NJ, USA, 2003. [Google Scholar]
- Haykin, S.S. Adaptive Filter Theory; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Hoon, Y.; Mohd Radzi, M.; Hassan, M.; Mailah, N. Control Algorithms of Shunt Active Power Filter for Harmonics Mitigation: A Review. Energies 2017, 10, 2038. [Google Scholar] [CrossRef]
- Hoon, Y.; Mohd Radzi, M. PLL-Less Three-Phase Four-Wire SAPF with STF-dq0 Technique for Harmonics Mitigation under Distorted Supply Voltage and Unbalanced Load Conditions. Energies 2018, 11, 2143. [Google Scholar] [CrossRef]
- Hamoudi, F.; Amimeur, H. Analysis and Sliding Mode Control of Four-Wire Three-Leg Shunt Active Power Filter. Adv. Electr. Electron. Eng. 2015, 13, 430–441. [Google Scholar] [CrossRef]
- Baros, J. Sensor System Based on Virtual Instrumentation. Available online: https://dspace.vsb.cz/bitstream/handle/10084 (accessed on 13 February 2020).
- IEC 61000-4-30. Available online: https://webstore.iec.ch/publication/22270 (accessed on 21 February 2020).
- CSN EN 50160. Available online: https://www.technicke-normy-csn.cz/inc/nahled_normy.php?norma=330122-csn-en-50160-ed-3&kat=87467 (accessed on 21 February 2020).
- Voltage/Voltage Convertor. Available online: https://en.32dev.cz/subdom/en/products/voltage-voltage-convertor/ (accessed on 10 February 2020).
- Current/Voltage Convertor. Available online: https://en.32dev.cz/subdom/en/products/current-voltage-convertor/ (accessed on 10 February 2020).
- Martinek, R.; Konecny, J.; Koudelka, P.; Zidek, J.; Nazeran, H. Adaptive Optimization of Control Parameters for Feed-Forward Software Defined Equalization. Wirel. Pers. Commun. 2017, 95, 4001–4011. [Google Scholar] [CrossRef]

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Time (s) | Method | Power (%) | Wait After (s) |
|---|---|---|---|---|
| 0 | 0 | Full OFF | 0 | 5 |
| 1 | 5 | Full ON | 100 | 10 |
| 2 | 15 | Full OFF | 0 | 10 |
| 3 | 25 | 2 - ON | 100 | 3 |
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ |
| 43 | 153 | 8,9,10 - OFF | 0 | 3 |
| 44 | 156 | 11 - OFF | 0 | 3 |
| 45 | 159 | Full Off | 0 | 5 |
| Phase | THD(%) | THD (%) | THD (%) |
|---|---|---|---|
| L1 | 27.83 | 4.01 | 3.62 |
| L2 | 39.91 | 8.00 | 7.02 |
| L3 | 31.08 | 6.17 | 5.25 |
| Phase | THD(%) | THD (%) | THD (%) |
|---|---|---|---|
| L1 | 38.06 | 13.07 | 6.59 |
| L2 | 43.33 | 12.91 | 7.89 |
| L3 | 32.37 | 9.46 | 5.70 |
| THD (%) without Filtration | THD (%) (μ = 0.00025) | THD (%) (μ = 0.0005) | THD (%) (μ = 0.001) | THD (%) (μ = 0.002) | THD (%) (μ = 0.005) | |
|---|---|---|---|---|---|---|
| L1 | 22.66 | 1.25 | 2.48 | 4.83 | 8.86 | 15.8 |
| L2 | 27.29 | 1.6 | 3.003 | 5.67 | 10.27 | 18.323 |
| L3 | 21.75 | 0.9 | 1.96 | 3.98 | 7.49 | 13.938 |
| Adaptation time (ms) | - | 100 | 60 | 40 | 15 | 5 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martinek, R.; Bilik, P.; Baros, J.; Brablik, J.; Kahankova, R.; Jaros, R.; Danys, L.; Rzidky, J.; Wen, H. Design of a Measuring System for Electricity Quality Monitoring within the SMART Street Lighting Test Polygon: Pilot Study on Adaptive Current Control Strategy for Three-Phase Shunt Active Power Filters. Sensors 2020, 20, 1718. https://doi.org/10.3390/s20061718
Martinek R, Bilik P, Baros J, Brablik J, Kahankova R, Jaros R, Danys L, Rzidky J, Wen H. Design of a Measuring System for Electricity Quality Monitoring within the SMART Street Lighting Test Polygon: Pilot Study on Adaptive Current Control Strategy for Three-Phase Shunt Active Power Filters. Sensors. 2020; 20(6):1718. https://doi.org/10.3390/s20061718
Chicago/Turabian StyleMartinek, Radek, Petr Bilik, Jan Baros, Jindrich Brablik, Radana Kahankova, Rene Jaros, Lukas Danys, Jaroslav Rzidky, and He Wen. 2020. "Design of a Measuring System for Electricity Quality Monitoring within the SMART Street Lighting Test Polygon: Pilot Study on Adaptive Current Control Strategy for Three-Phase Shunt Active Power Filters" Sensors 20, no. 6: 1718. https://doi.org/10.3390/s20061718
APA StyleMartinek, R., Bilik, P., Baros, J., Brablik, J., Kahankova, R., Jaros, R., Danys, L., Rzidky, J., & Wen, H. (2020). Design of a Measuring System for Electricity Quality Monitoring within the SMART Street Lighting Test Polygon: Pilot Study on Adaptive Current Control Strategy for Three-Phase Shunt Active Power Filters. Sensors, 20(6), 1718. https://doi.org/10.3390/s20061718