MVDT-SI: A Multi-View Double-Triangle Algorithm for Star Identification



Abstract
1. Introduction
- Our new star identification algorithm does not depend on the magnitude information of the observed star map;
- The algorithm constructs multi-view double-triangle features to identify stars, which effectively improves the identification accuracy and robustness of the algorithm.
- Our new star identification algorithm is not affected by the focal length and the shooting angle of the star sensor.
2. Related Work
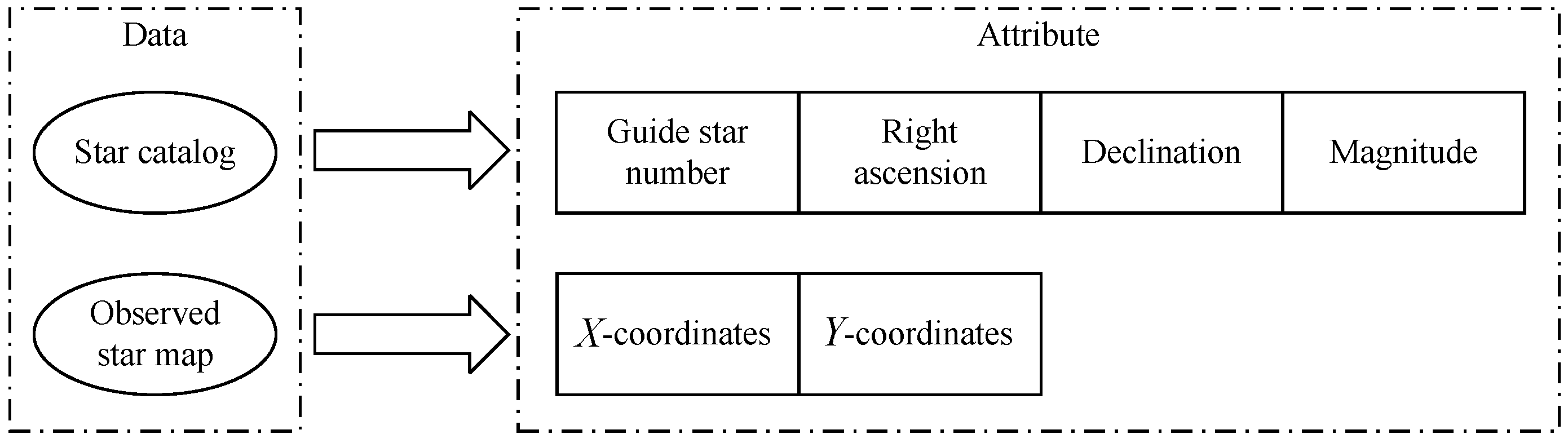
3. The Basic Star Catalog
4. Multi-View Double-Triangle Algorithm for Star Identification (MVDT-SI)
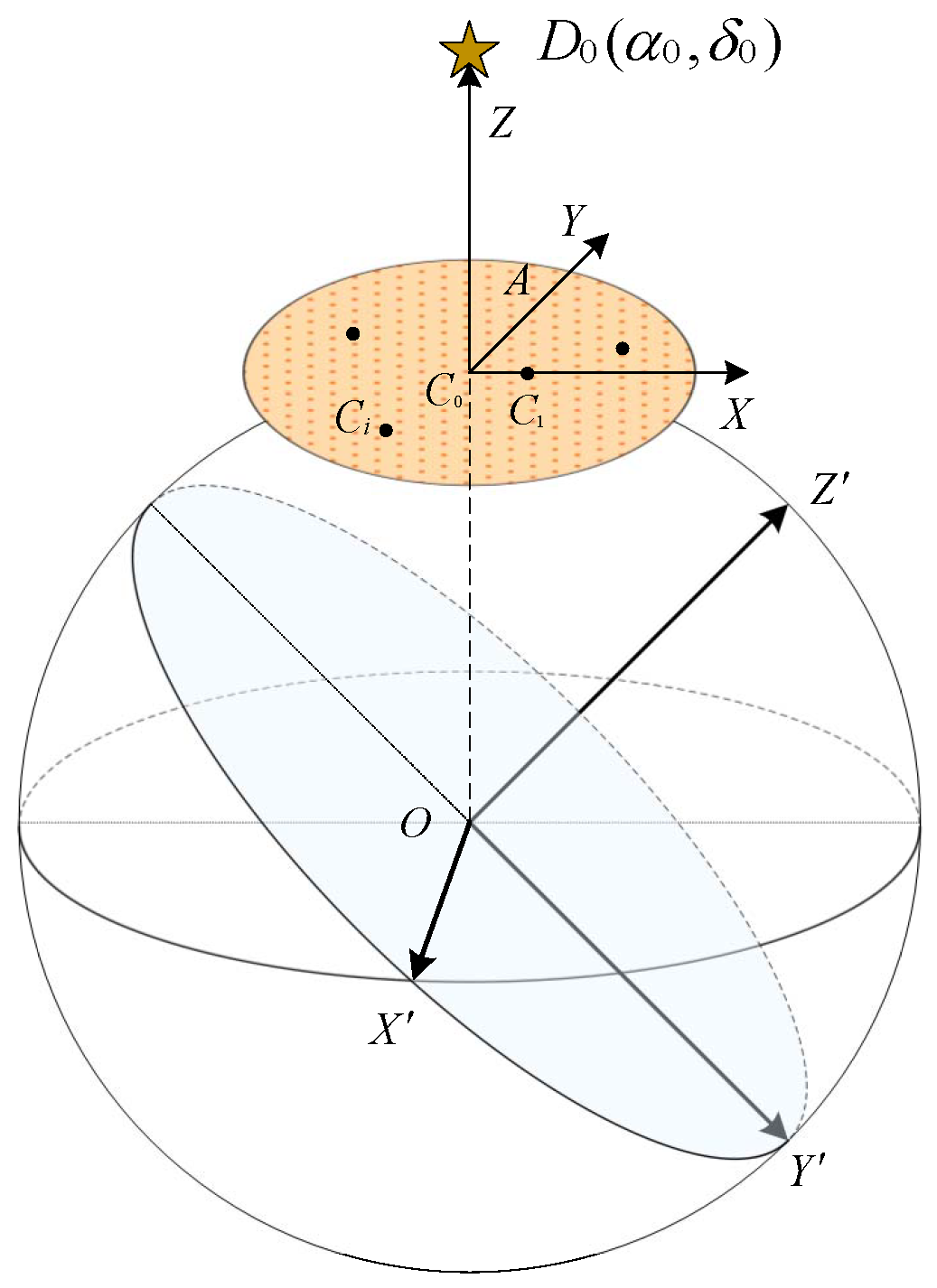
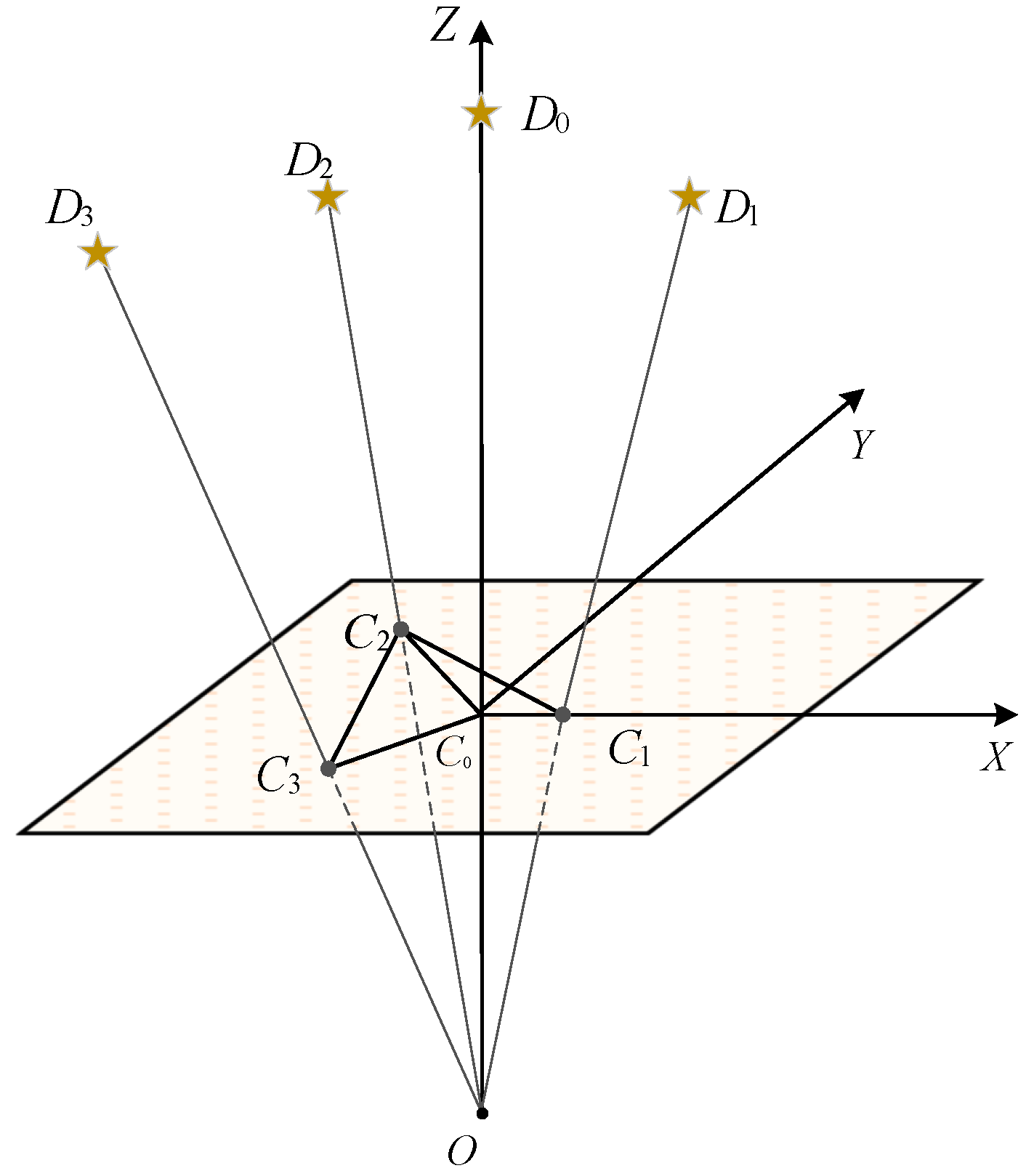
4.1. Coordinate Transformation of the Guide Star Catalog
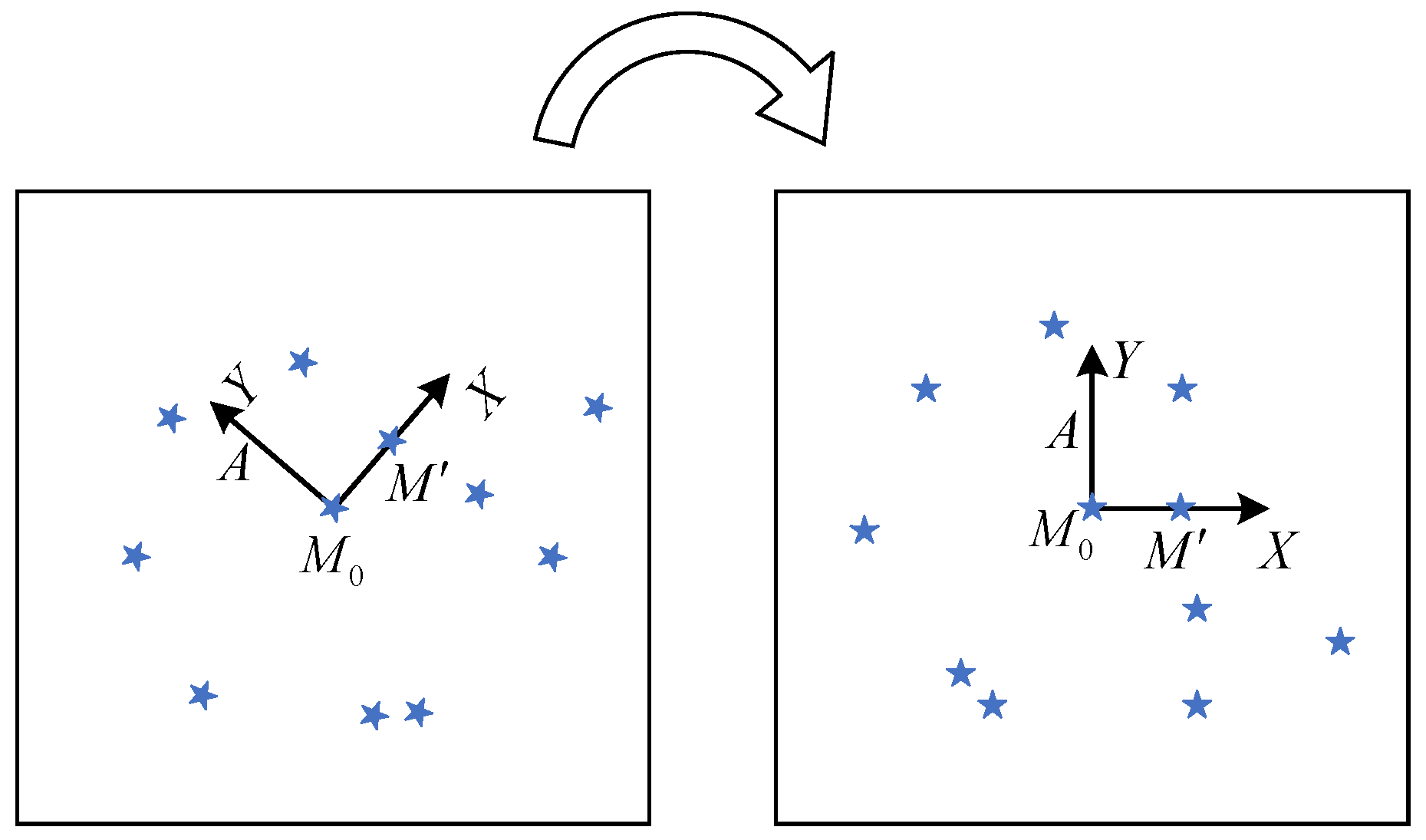
4.2. Rotation Invariance of the Observed Star Map
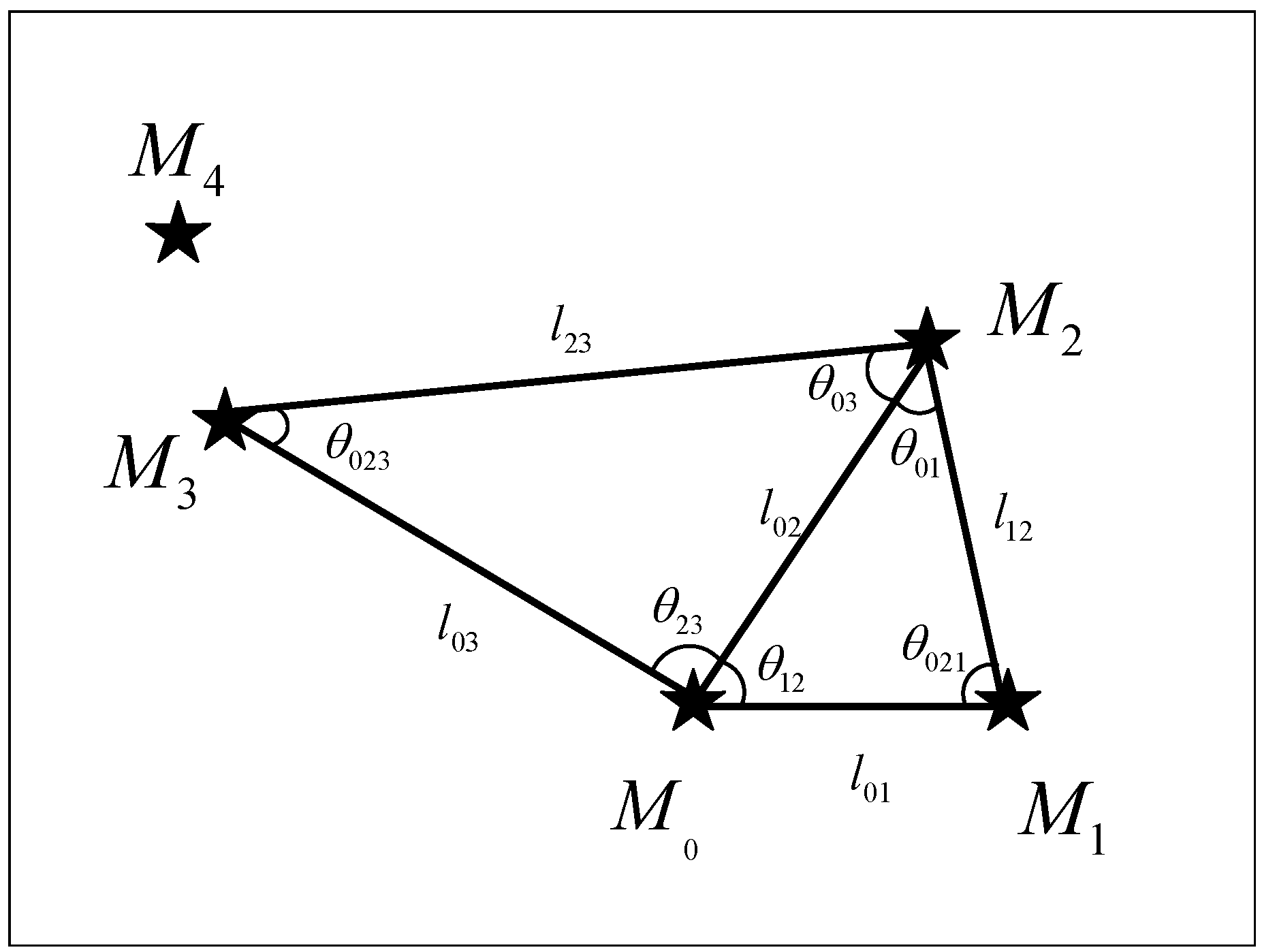
- We selected a star in the observed star map randomly named the reference star , and then we selected the auxiliary star according to certain rules (as shown in Section 4.3);
- We took the direction of vector as X-axis and its counter-clockwise orthogonal vector as Y-axis to establish a new coordinate system;
- The coordinates of all stars in the observed star map are represented in the new coordinate system;
- We standardized the coordinates of all stars in the new coordinate system by taking the module of vector as unit length.
4.3. Multi-View Double-Triangle Features of the Observed Star Map
4.4. Features of the Guide Star Catalog
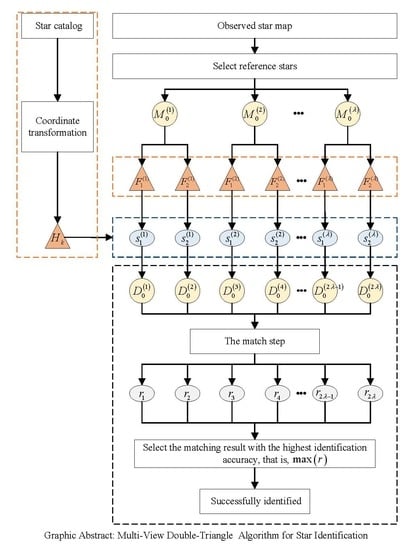
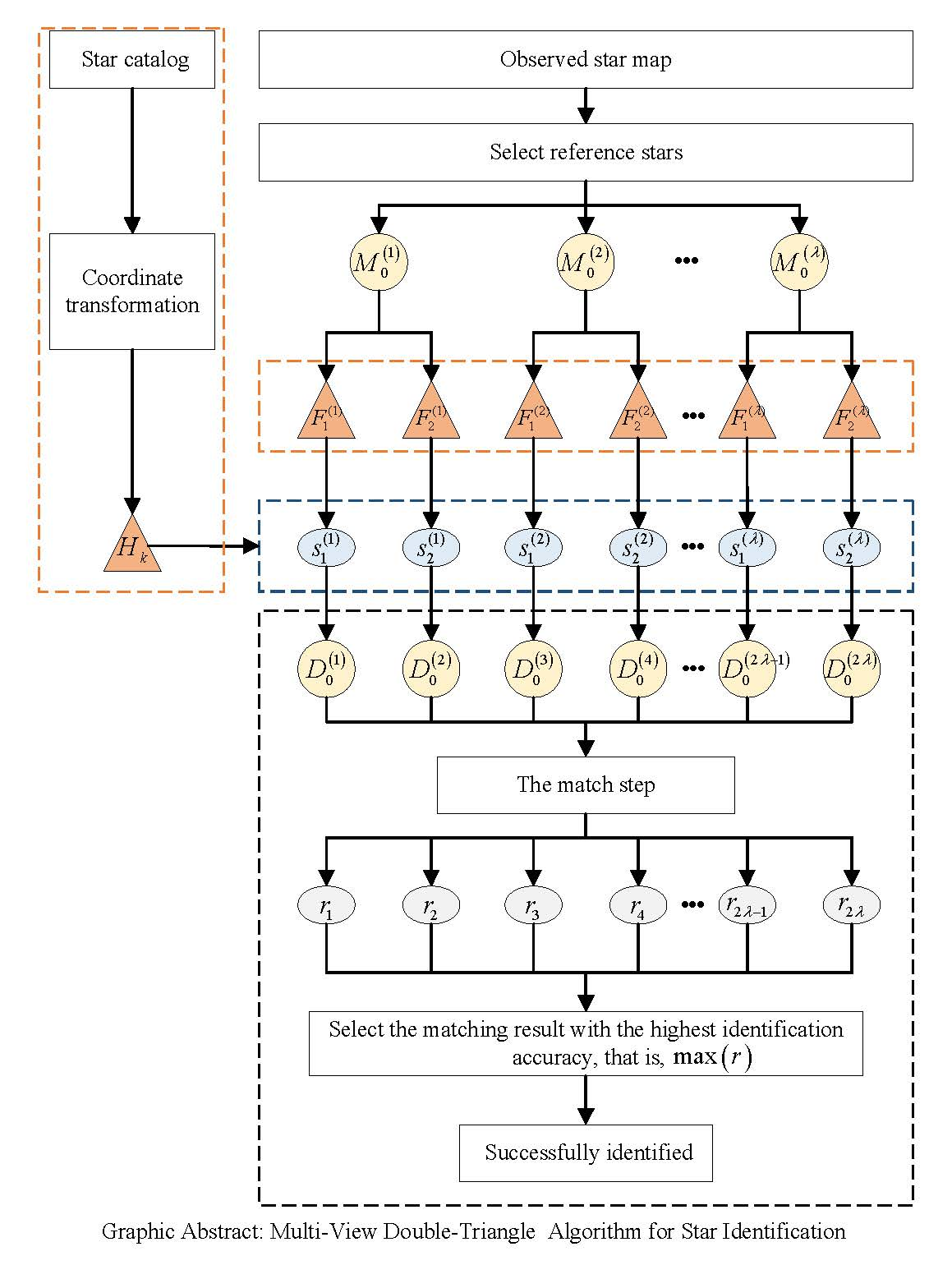
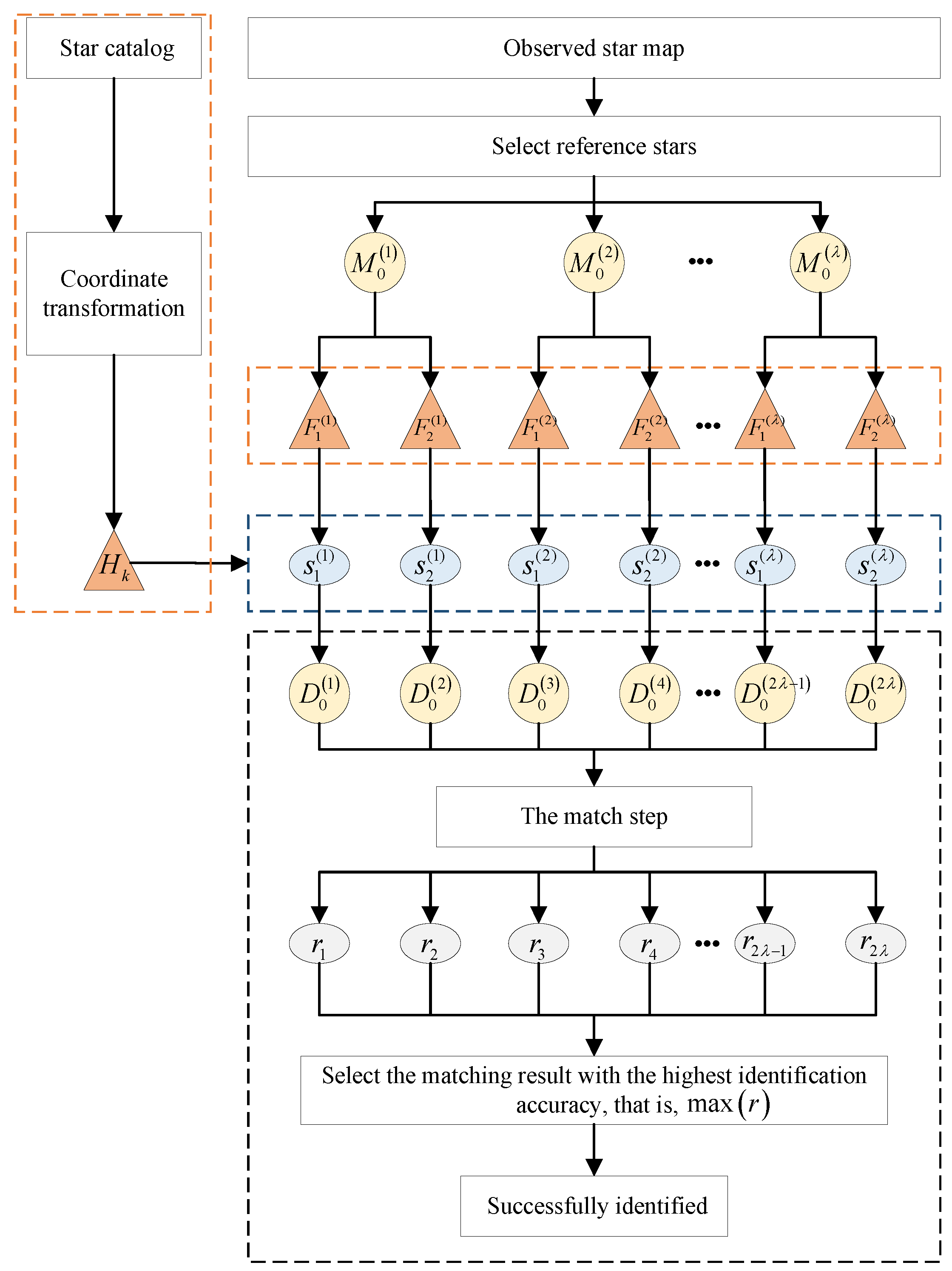
4.5. MVDT-SI Algorithm Flow
- Suppose there are N star points on the observed star map, and is the maximum number of the selected reference stars. If , the observed stars cannot be identified; If , one star point by one on the observed star map is used as the reference star to construct the double-triangle feature; If , we randomly selected star points as the reference stars and constructed the double-triangle features, i.e., the set of reference stars is .
- The second step is to identify the reference stars in the observed map. For the i-th reference star , their double-triangle features are constructed based on different auxiliary stars and respectively. In other words, each reference star has features of double views. Then, we compared the feature information on different views of the observed star map with the feature in the feature database . In other words, we calculated the sum of the differences between their features, i.e.,To reduce the computational complexity of , we only select stars in the feature database for matching. stars that meet the following conditions will be selected:where is the sum of the edge length feature of the reference star in the observed star map, is the sum of the edge length feature of the k-th star in the feature database, and is the sum of the edge length feature of the -th selected star in the feature database. represents the minimum value of the difference between the sum of the edge length of the reference star in the observed star map and the star in the feature database . After selection, is only about 3% of K (the number of guide star catalog). At this time, the selected feature database is and the is calculated as follows:Next, we respectively selected the corresponding star number with the smallest difference in the guide star catalog as the number of star in the observed star map. At this time, we got the most likely stars corresponding to different reference stars on the views.
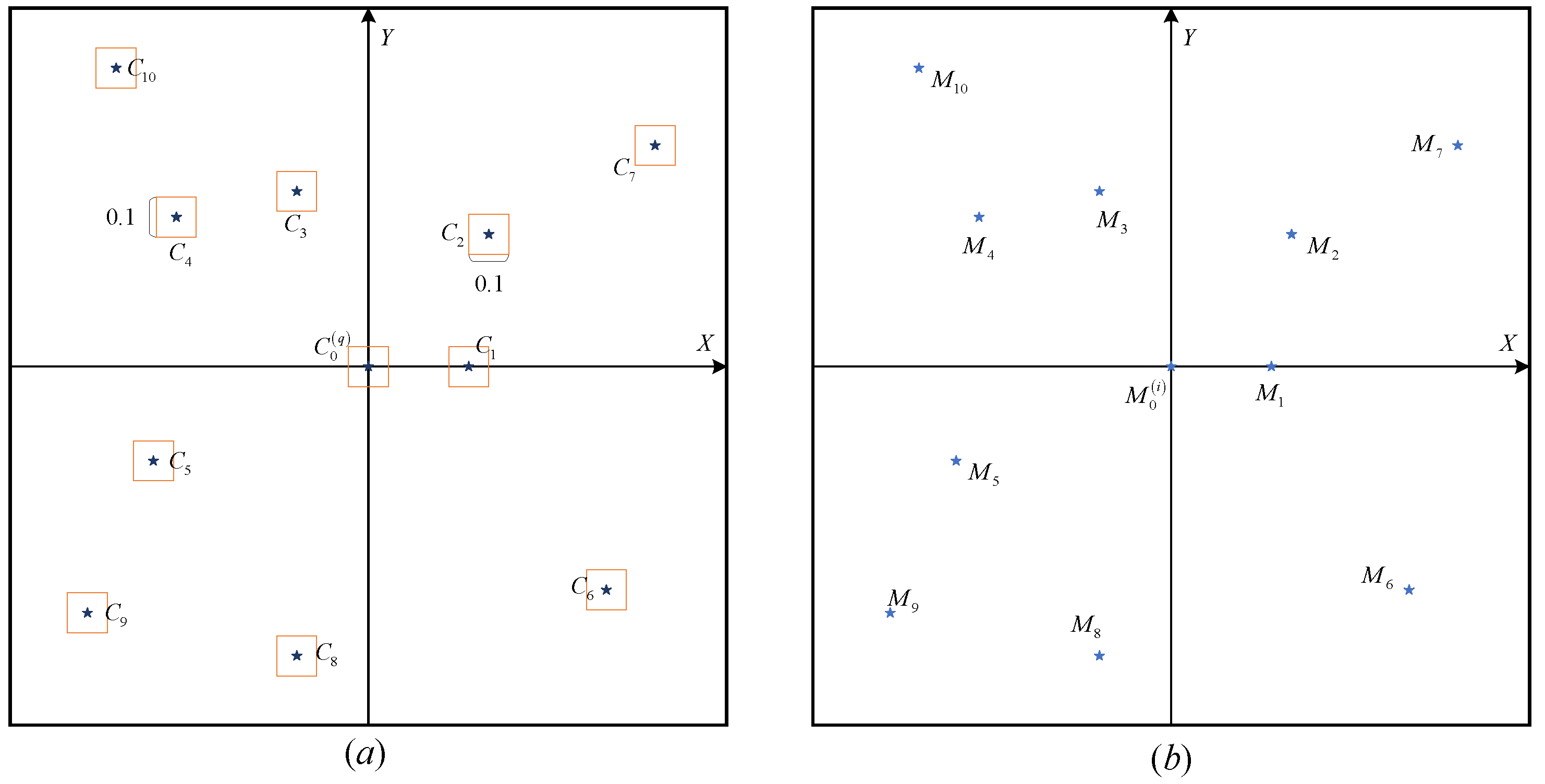
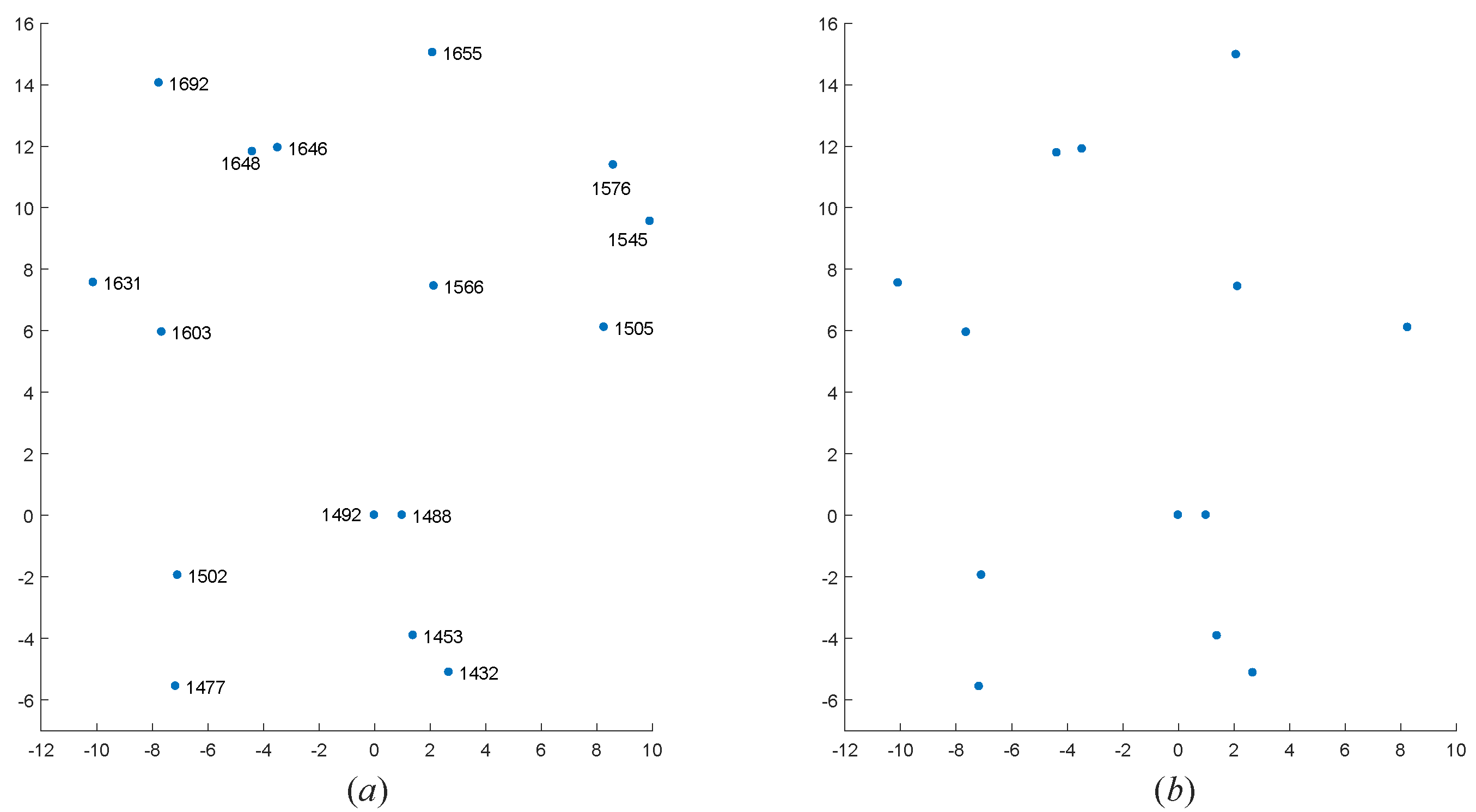
- The third step is to identify all the star points in the observed map based on the reference stars. Based on the second step, we can obtain the number of the reference star in the observed star map which is corresponding to the star (the projection point is , ) in the guide star catalog. Therefore, through the operation of the Section 4.1 and Section 4.2, we can get the standardized star maps of the guide star map and the observed star map. First, as shown in the Figure 6, we created boxes (size unit) whose centers are stars in the guide star map. Next, we determined whether the stars in the observed star map are in these boxes. If one star point on the observed star map falls into a box of the guide star map, the star point will be marked with the corresponding number of the guide star. If the star point falls into multiple boxes at the same time, the point is marked with the corresponding number of the guide star with the smallest magnitude within the box. Otherwise, it is marked as −1.
- Finally, the star identification results r of different star points in different views are calculated. The statistical value of star identification result r is increased by 1 for each successful star identification. In other words, the star identification results r is the number of star points on the observed map which is not marked as −1. According to the identification results of reference stars in different views, the results with the most successful star identification is selected as the final number of the star points in the observed star map.
5. Experiments
5.1. Experiment Settings
5.2. Experiments on the Simulated Star Map
5.2.1. Results without False/Missing Stars
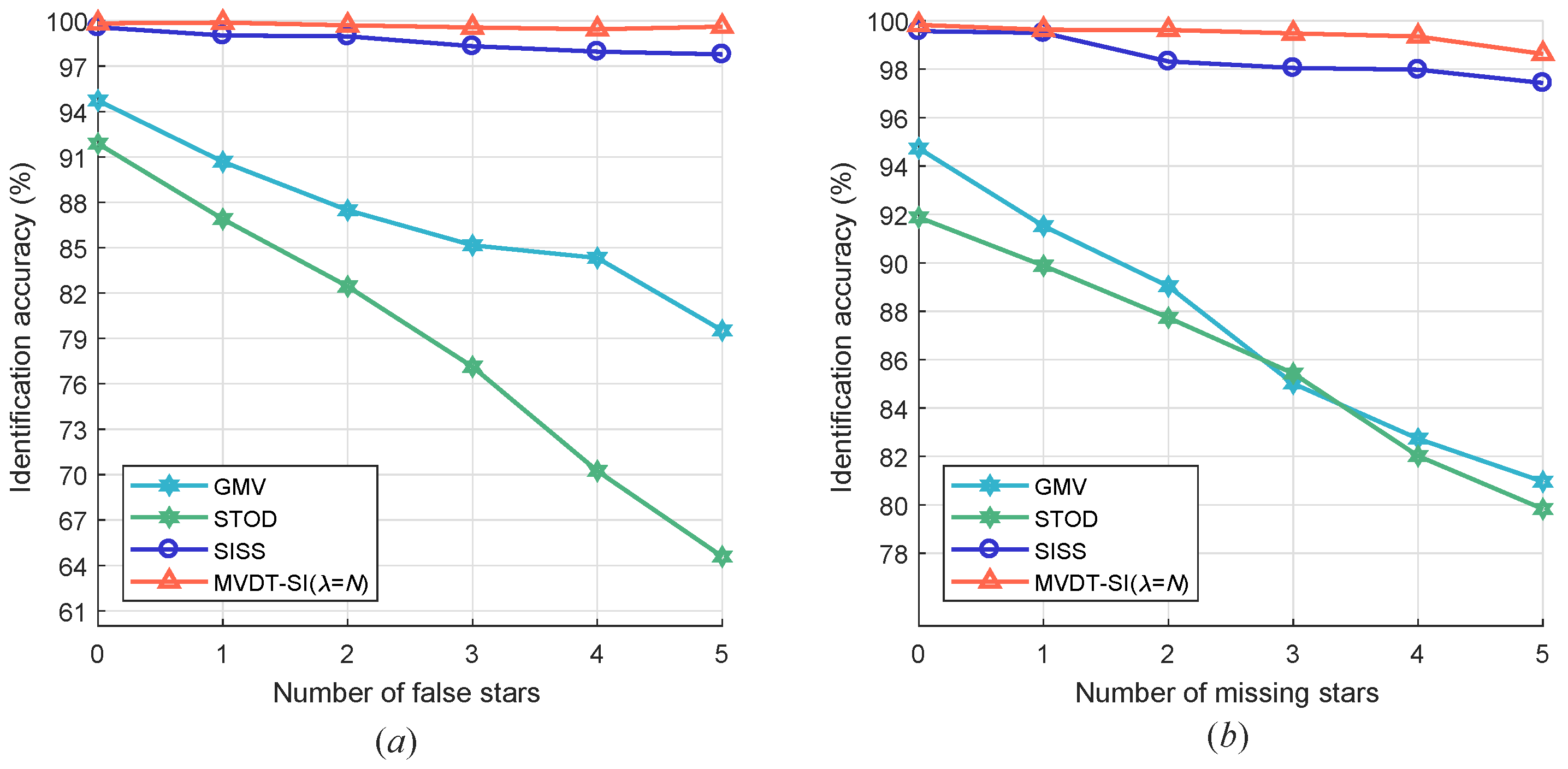
5.2.2. Results with False/Missing Stars Only
5.2.3. Results with Both False and Missing Stars
5.3. Experiments on the Real Star Map
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, A.G. Modern celestial navigation and the key techniques. Tien Tzu Hsueh Pao/Acta Electron. Sin. 2007, 35, 2347–2353. [Google Scholar]
- Liebe, C.C. Accuracy performance of star trackers—A tutorial. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 587–599. [Google Scholar] [CrossRef]
- Xu, W.; Li, Q.; Feng, H.J.; Xu, Z.H.; Chen, Y.T. A novel star image thresholding method for effective segmentation and centroid statistics. Optik 2013, 124, 4673–4677. [Google Scholar] [CrossRef]
- Ozkan, S.; Tola, E.; Soysal, M. Performance of star centroiding methods under near-real sensor artifact simulation. In Proceedings of the 2015 7th International Conference on Recent Advances in Space Technologies (RAST), Istanbul, Turkey, 16–19 June 2015; pp. 615–619. [Google Scholar]
- Wei, X.; Wen, D.; Song, Z.; Xi, J.; Zhang, W.; Liu, G.; Li, Z. A Systematic Error Compensation Method Based on an Optimized Extreme Learning Machine for Star Sensor Image Centroid Estimation. Appl. Sci. 2019, 9, 4751. [Google Scholar]
- Spratling, B.B.; Mortari, D. A Survey on Star Identification Algorithms. Algorithms 2009, 2, 93–107. [Google Scholar] [CrossRef]
- Vogiatzis, C.; Camur, M.C. Identification of Essential Proteins Using Induced Stars in Protein-Protein Interaction Networks. INFORMS J. Comput. 2019, 31, 703–718. [Google Scholar] [CrossRef]
- Mehta, D.S.; Chen, S.; Low, K.S. A Hamming Distance and Spearman Correlation Based Star Identification Algorithm. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 17–30. [Google Scholar] [CrossRef]
- Accardo, D.; Rufino, G. Brightness-independent start-up routine for star trackers. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 813–823. [Google Scholar] [CrossRef]
- Padgett, C.; Kreutz-Delgado, K.; Udomkesmalee, S. Evaluation of Star Identification Techniques. J. Guid. Control Dyn. 1997, 20, 259–267. [Google Scholar] [CrossRef]
- Junkins, J.L.; White, C.C.; Turner, J.D. Star pattern recognition for real time attitude determination. J. Astronaut. Sci. 1977, 25, 251–270. [Google Scholar]
- Der Heide, E.V.; Kruijff, M.; Avanzini, A.; Liedtke, V.; Karlovsky, A. Thermal Protection Testing of the Inflatable Capsule for YES2. In Proceedings of the 54th International Astronautical Congress of the International Astronautical Federation, the International Academy of Astronautics, and the International Institute of Space Law, Bremen, Germany, 29 September–3 October 2003. [Google Scholar]
- Mortari, D.; Samaan, M.; Bruccoleri, C.; Junkins, J. The Pyramid Star Identification Technique. Navigation 2004, 51, 171–183. [Google Scholar] [CrossRef]
- Li, J.; Wei, X.; Zhang, G. Iterative algorithm for autonomous star identification. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 536–547. [Google Scholar] [CrossRef]
- Wang, G.; Li, J.; Wei, X. Star Identification Based on Hash Map. IEEE Sens. J. 2017, 18, 1591–1599. [Google Scholar] [CrossRef]
- Padgett, C.; Kreutz-Delgado, K. A grid algorithm for autonomous star identification. IEEE Trans. Aerosp. Electron. Syst. 1997, 33, 202–213. [Google Scholar] [CrossRef]
- Zhang, G.; Wei, X.; Jiang, J. Full-sky autonomous star identification based on radial and cyclic features of star pattern. Image Vis. Comput. 2008, 26, 891–897. [Google Scholar] [CrossRef]
- Zhao, Y.; Wei, X.; Li, J.; Wang, G. Star Identification Algorithm Based on KL Transformation and Star Walk Formation. IEEE Sens. J. 2016, 16, 5202–5210. [Google Scholar] [CrossRef]
- Zhang, G. Star Identification Utilizing Neural Networks; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Paladugu, L.; Schoen, M.; Seisie-Amoasi, E.; Williams, B. Intelligent Star Pattern Recognition for Attitude Determination: The “Lost in Space” Problem. J. Aerosp. Comput. Inf. Commun. 2006, 3, 538–549. [Google Scholar] [CrossRef]
- Hong, J.; Dickerson, J. Neural-Network-Based Autonomous Star Identification Algorithm. J. Guid. Control Dyn. 2000, 23, 728–735. [Google Scholar] [CrossRef]
- Xu, L.; Jiang, J.; Liu, L. RPNet: A Representation Learning-Based Star Identification Algorithm. IEEE Access 2019, 7, 92193–92202. [Google Scholar] [CrossRef]
- Delabieo, T.; Durt, T.; Vandersteen, J. Highly Robust Lost-in-Space Algorithm Based on the Shortest Distance Transform. J. Guidance Control Dyn. 2013, 36, 476–484. [Google Scholar]
- Sohrabi, S.; Shirazi, A.B. A novel, smart and fast searching method for star pattern recognition using star magnitudes. In Proceedings of the 2010 25th International Conference of Image and Vision Computing New Zealand, Queenstown, New Zealand, 8–9 November 2010. [Google Scholar]
- Mortari, D.; Junkins, J.L.; Samaan, M. Lost-in-space pyramid algorithm for robust star pattern recognition. Guid. Control 2001, 2001, 49–68. [Google Scholar]
- Needelman, D.D.; Alstad, J.P.; Lai, P.C.; Elmasri, H.M. Fast Access and Low Memory Star Pair Catalog for Star Pattern Identification. J. Guid. Control Dyn. 2010, 33, 1396–1403. [Google Scholar] [CrossRef]
- Pham, M.D.; Low, K.; Chen, S. An Autonomous Star Recognition Algorithm with Optimized Database. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1467–1475. [Google Scholar]
- Kolomenkin, M.; Pollak, S.; Shimshoni, I.; Lindenbaum, M. Geometric voting algorithm for star trackers. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 441–456. [Google Scholar]
- Mehta, D.S.; Chen, S.; Low, K.S. A robust star identification algorithm with star shortlisting. Adv. Space Res. 2018, 61, 2647–2660. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technique | Identification Accuracy (%) | Identification Time (s) | Storage Size (MB) |
|---|---|---|---|
| GMV [28] | 92.97 | 0.758 | 1.31 |
| STOD [27] | 91.26 | 0.415 | 1.40 |
| SISS [29] | 99.08 | 0.420 | 1.70 |
| SVST-SI | 27.72 | 0.031 | 0.23 |
| MVDT-SI () | 99.51 | 0.102 | 0.44 |
| MVDT-SI () | 99.75 | 0.285 | 0.44 |
| Technique | Identification Accuracy (%) | Identification Time (s) | Storage Size (MB) |
|---|---|---|---|
| GMV [28] | 94.73 | 0.767 | 1.31 |
| STOD [27] | 91.88 | 0.412 | 1.40 |
| SISS [29] | 99.57 | 0.501 | 1.70 |
| SVST-SI | 17.36 | 0.034 | 0.23 |
| MVDT-SI () | 98.56 | 0.112 | 0.44 |
| MVDT-SI () | 99.83 | 0.483 | 0.44 |
| 0 | 1 | 2 | 0 | 1 | 2 | |
|---|---|---|---|---|---|---|
| 0 | 99.75% | 99.67% | 99.64% | 99.83% | 99.63% | 99.62% |
| 1 | 99.88% | 99.72% | 99.52% | 99.88% | 99.69% | 99.67% |
| 2 | 99.56% | 98.54% | 98.47% | 99.70% | 99.43% | 99.44% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, L.; Zhou, Y. MVDT-SI: A Multi-View Double-Triangle Algorithm for Star Identification. Sensors 2020, 20, 3027. https://doi.org/10.3390/s20113027
Sun L, Zhou Y. MVDT-SI: A Multi-View Double-Triangle Algorithm for Star Identification. Sensors. 2020; 20(11):3027. https://doi.org/10.3390/s20113027
Chicago/Turabian StyleSun, Lijian, and Yun Zhou. 2020. "MVDT-SI: A Multi-View Double-Triangle Algorithm for Star Identification" Sensors 20, no. 11: 3027. https://doi.org/10.3390/s20113027
APA StyleSun, L., & Zhou, Y. (2020). MVDT-SI: A Multi-View Double-Triangle Algorithm for Star Identification. Sensors, 20(11), 3027. https://doi.org/10.3390/s20113027