Author Contributions
F.P., L.S., C.C., A.S., A.L., G.C., F.C., A.E. participated to the site integrated geophysics and geomatic surveys. L.S. and C.C. were responsible for ERT and GM data collection, processing and interpretation, while G.C. for GPR investigation. Concerning geomatics 3D surveys: A.L. was responsible for topographical measures and processing, F.C. and P.M. for photogrammetric and LiDAR data collection; A.S. was responsible for MMS survey and A.C. for 3D model web visualization. L.S., C.C., A.C., A.S., F.C., G.C. and F.P. wrote the manuscript and all authors contributed to data or figures elaborations; project coordination: Francesco Porcelli. All authors have read and agreed to the published version of the manuscript.
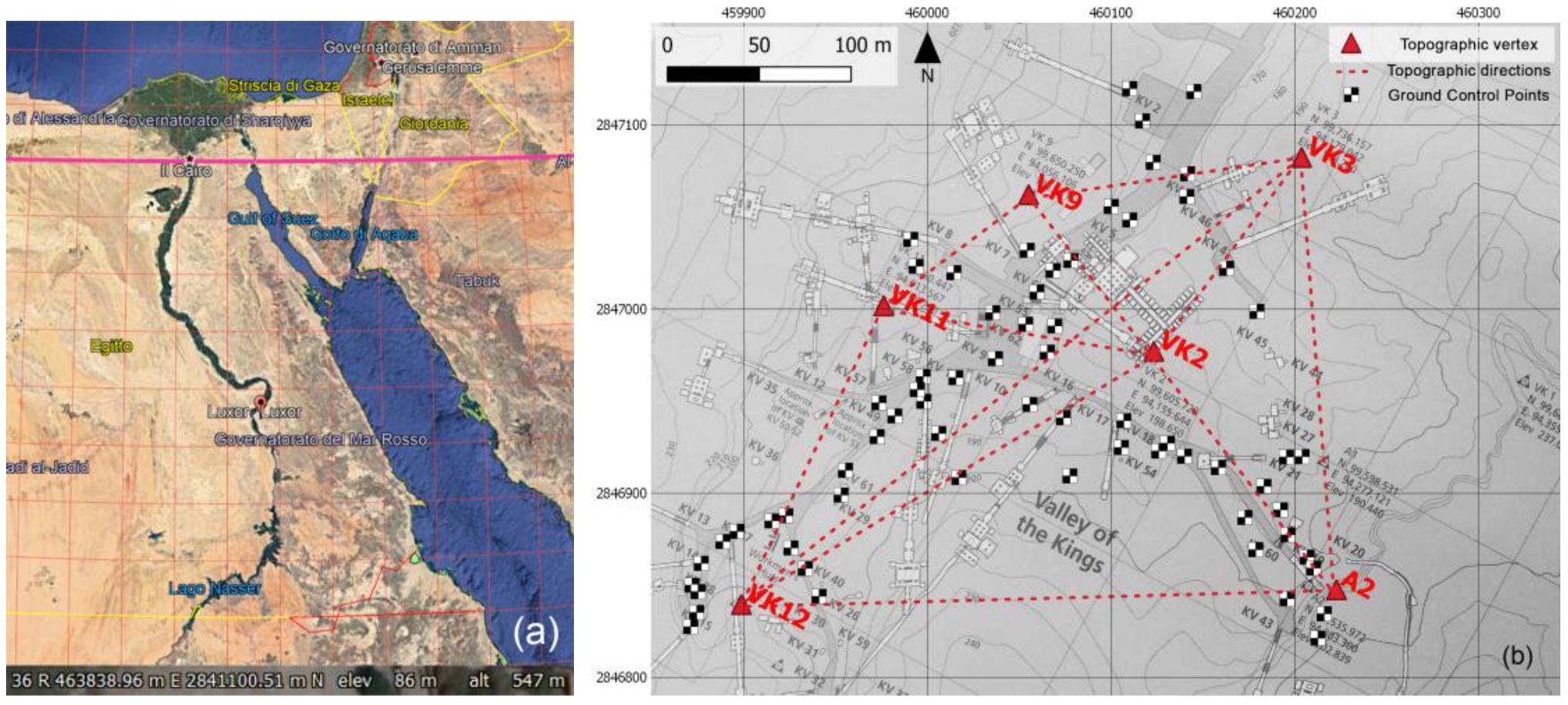
Figure 1.
The Valley of Kings (VOK) in Luxor: (a) VOK location in UTM (source Google Earth). (b) The measured topographic network (red triangles) and the localization of Ground Control Points (black and white markers) derived from total station measurements, superimposed to the Sheet 1/70, KV and WV extracted from the Atlas of the Theban Mapping Project (TMP), page 13, Plan 1:2500, Contour interval 10 m.
Figure 1.
The Valley of Kings (VOK) in Luxor: (a) VOK location in UTM (source Google Earth). (b) The measured topographic network (red triangles) and the localization of Ground Control Points (black and white markers) derived from total station measurements, superimposed to the Sheet 1/70, KV and WV extracted from the Atlas of the Theban Mapping Project (TMP), page 13, Plan 1:2500, Contour interval 10 m.
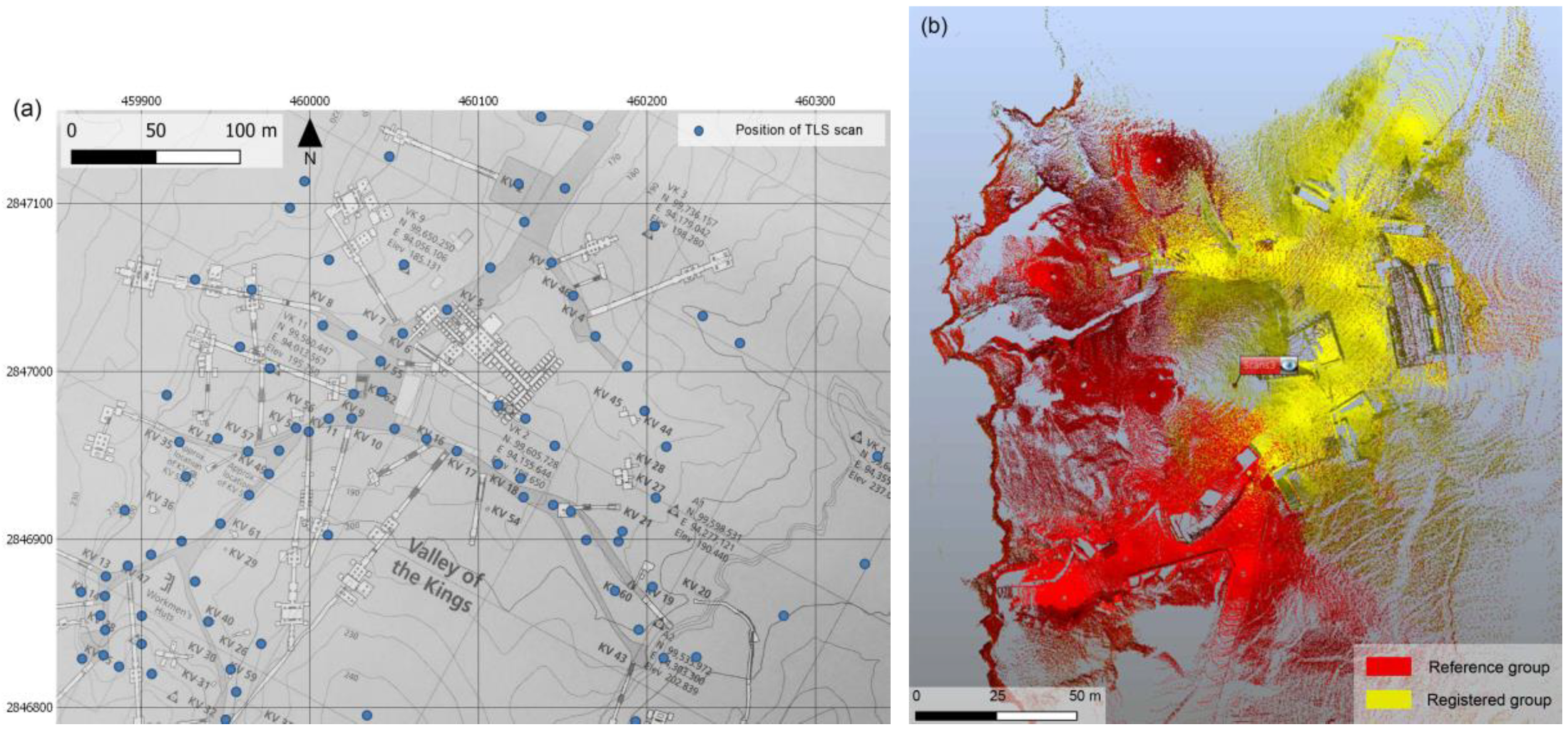
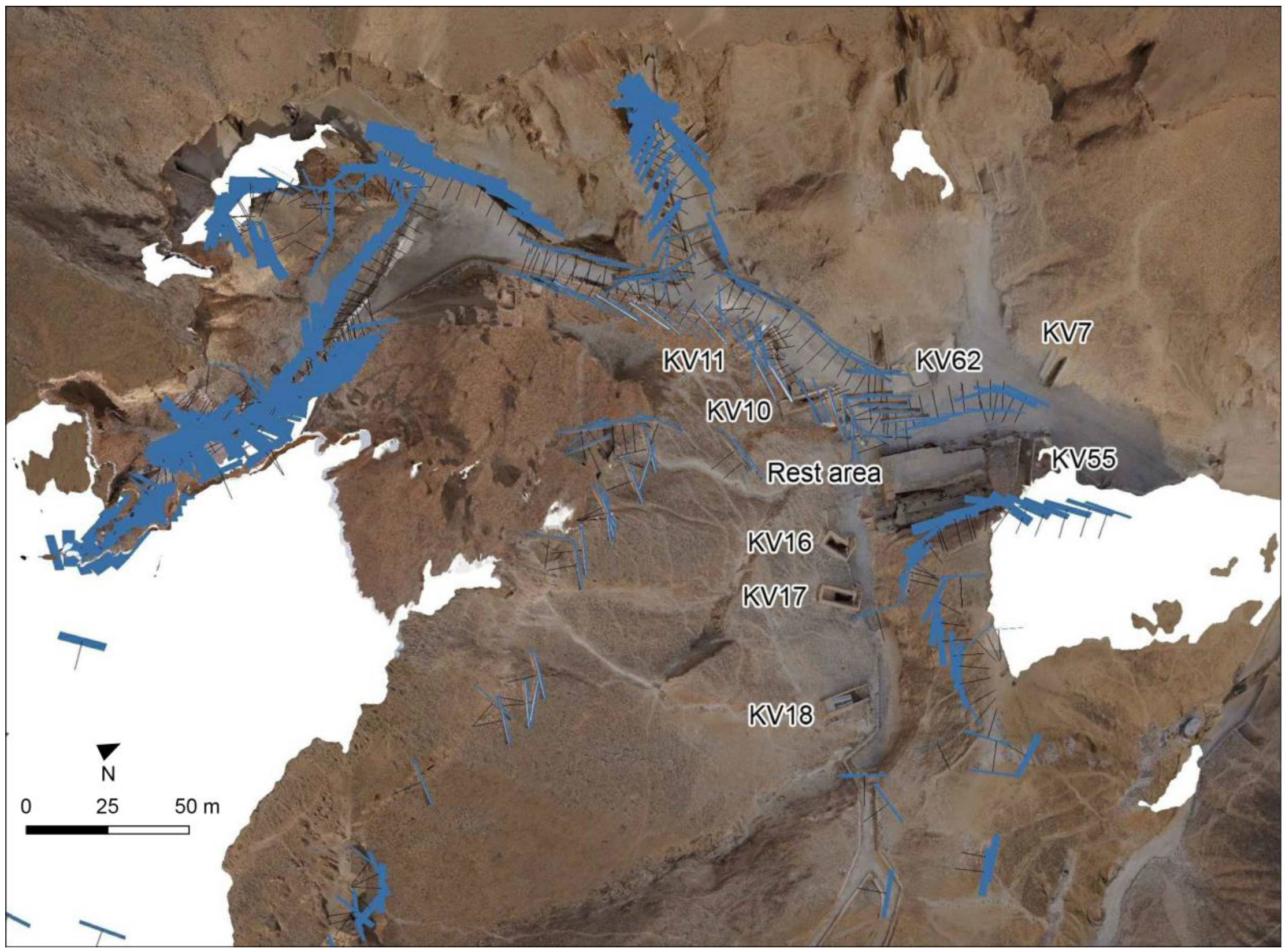
Figure 2.
Laser scanning survey: (a) position of each of the acquired TLS scans (blue dots), superimposed to the Sheet 1/70, KV and WV extracted from the Atlas of the TMP, page 13, Plan 1:2500, Contour interval 10 m. (b) The registration process of the scans groups performed via the software Faro SCENE.
Figure 2.
Laser scanning survey: (a) position of each of the acquired TLS scans (blue dots), superimposed to the Sheet 1/70, KV and WV extracted from the Atlas of the TMP, page 13, Plan 1:2500, Contour interval 10 m. (b) The registration process of the scans groups performed via the software Faro SCENE.
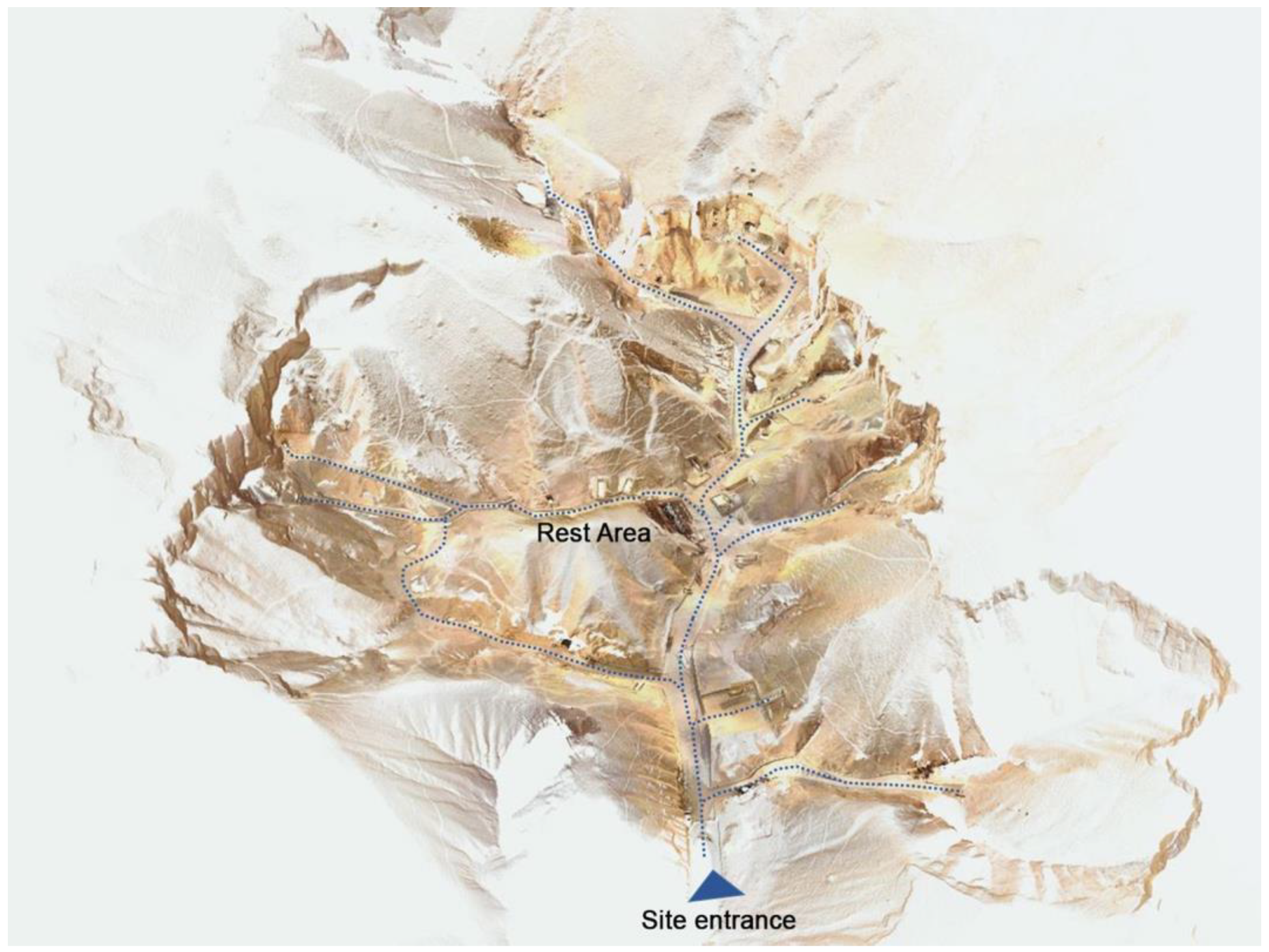
Figure 3.
Image of the resulting merged point clouds (102 single scans) with more than 2 billion of points, and with superimposed visiting paths (open and closed).
Figure 3.
Image of the resulting merged point clouds (102 single scans) with more than 2 billion of points, and with superimposed visiting paths (open and closed).
Figure 4.
General map of the more than thirty scan trajectories acquired by the MMS platform in the VOK. Different colors represent different surveyed paths.
Figure 4.
General map of the more than thirty scan trajectories acquired by the MMS platform in the VOK. Different colors represent different surveyed paths.
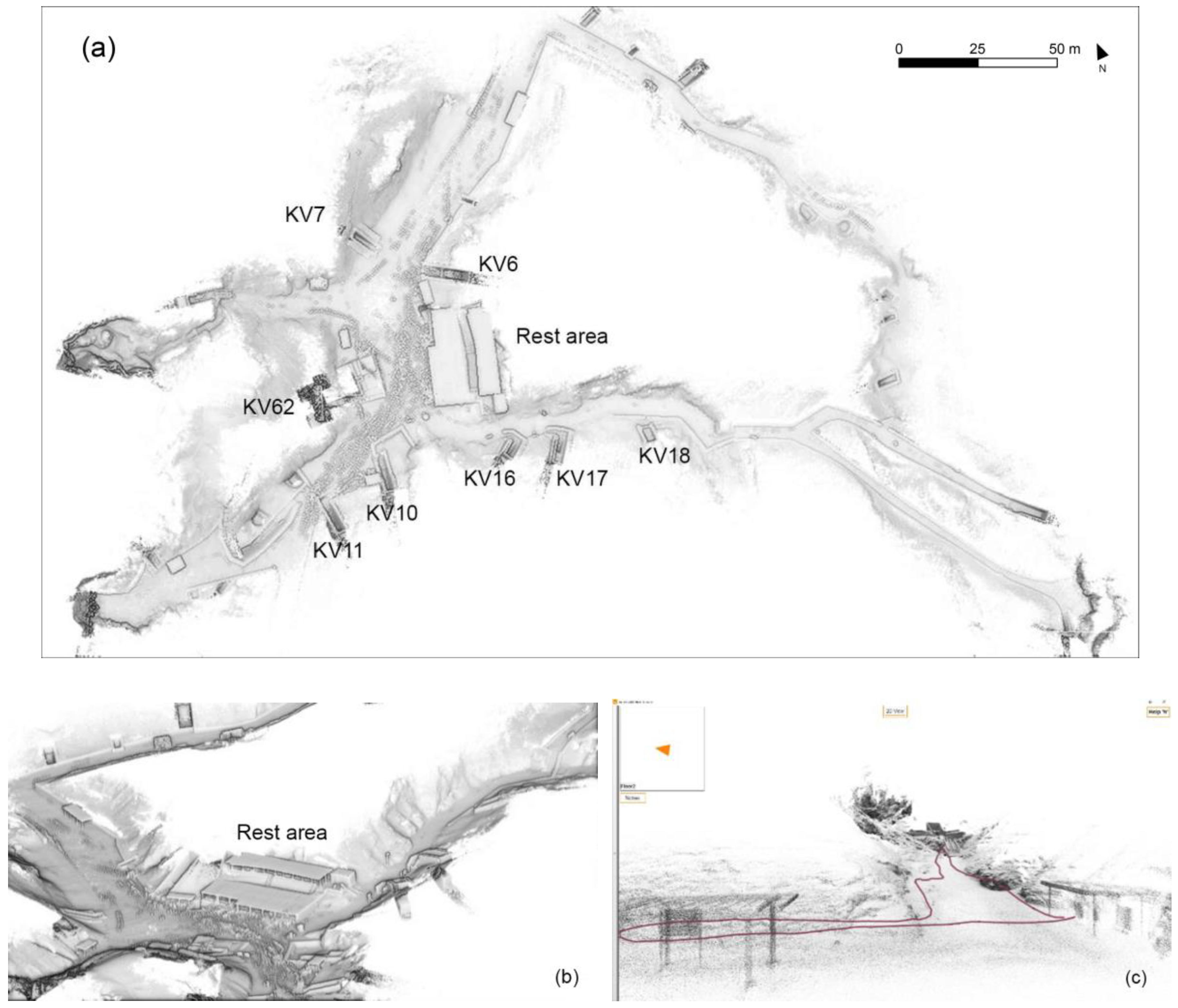
Figure 5.
Mobile Mapping System survey: (a) the plan view of several registered point clouds acquired by MMS (b,c) Some views of the 3D model, in shaded features (b) and with the trajectory (c).
Figure 5.
Mobile Mapping System survey: (a) the plan view of several registered point clouds acquired by MMS (b,c) Some views of the 3D model, in shaded features (b) and with the trajectory (c).
Figure 6.
The position of the estimated camera centers after the photogrammetric block orientation, superimposed on the orthophoto generated from the subsequent photogrammetric process.
Figure 6.
The position of the estimated camera centers after the photogrammetric block orientation, superimposed on the orthophoto generated from the subsequent photogrammetric process.
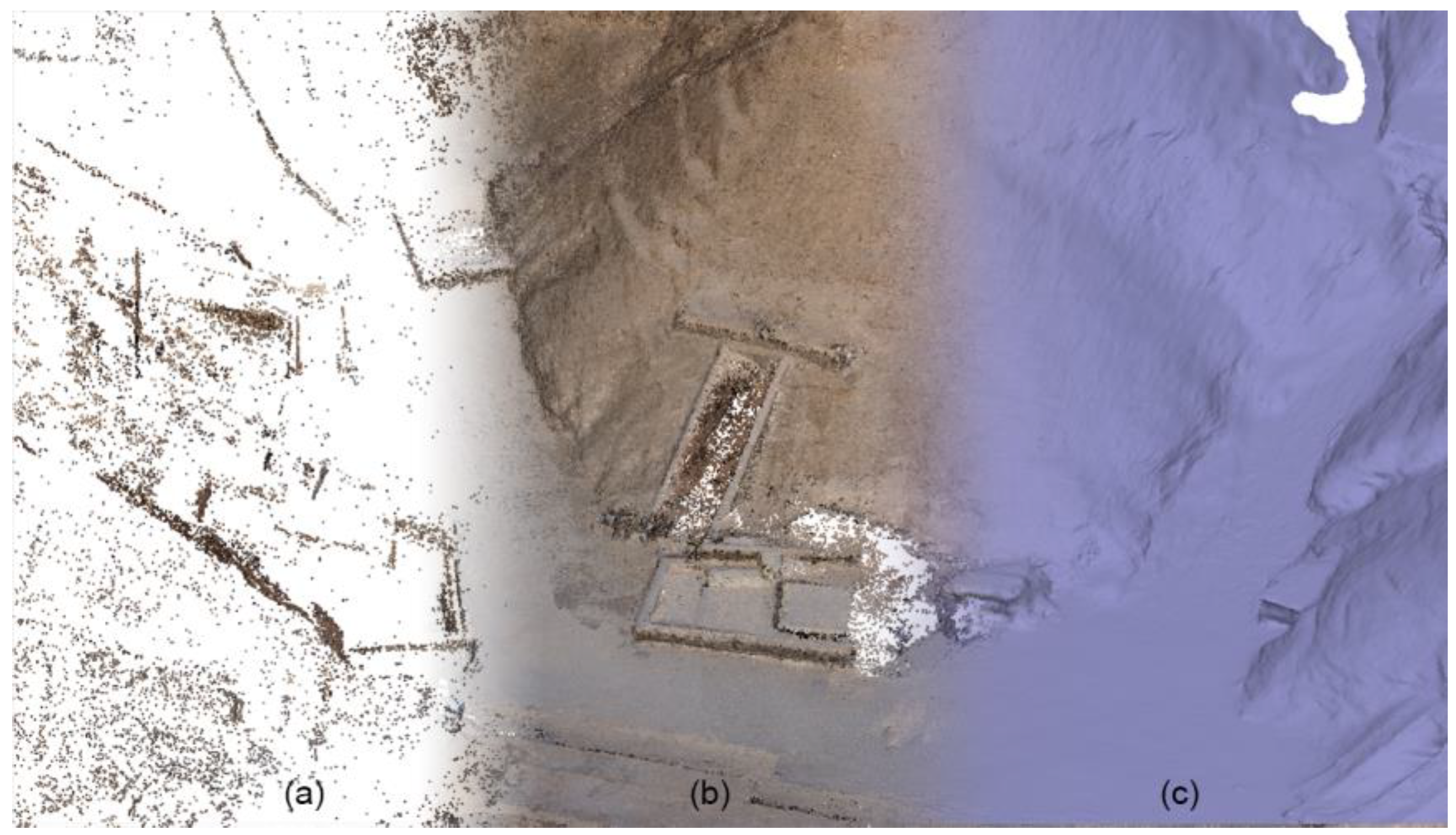
Figure 7.
A picture presenting the different 3D photogrammetric products: Sparse point cloud (a) dense point cloud (b), triangulated mesh (c).
Figure 7.
A picture presenting the different 3D photogrammetric products: Sparse point cloud (a) dense point cloud (b), triangulated mesh (c).
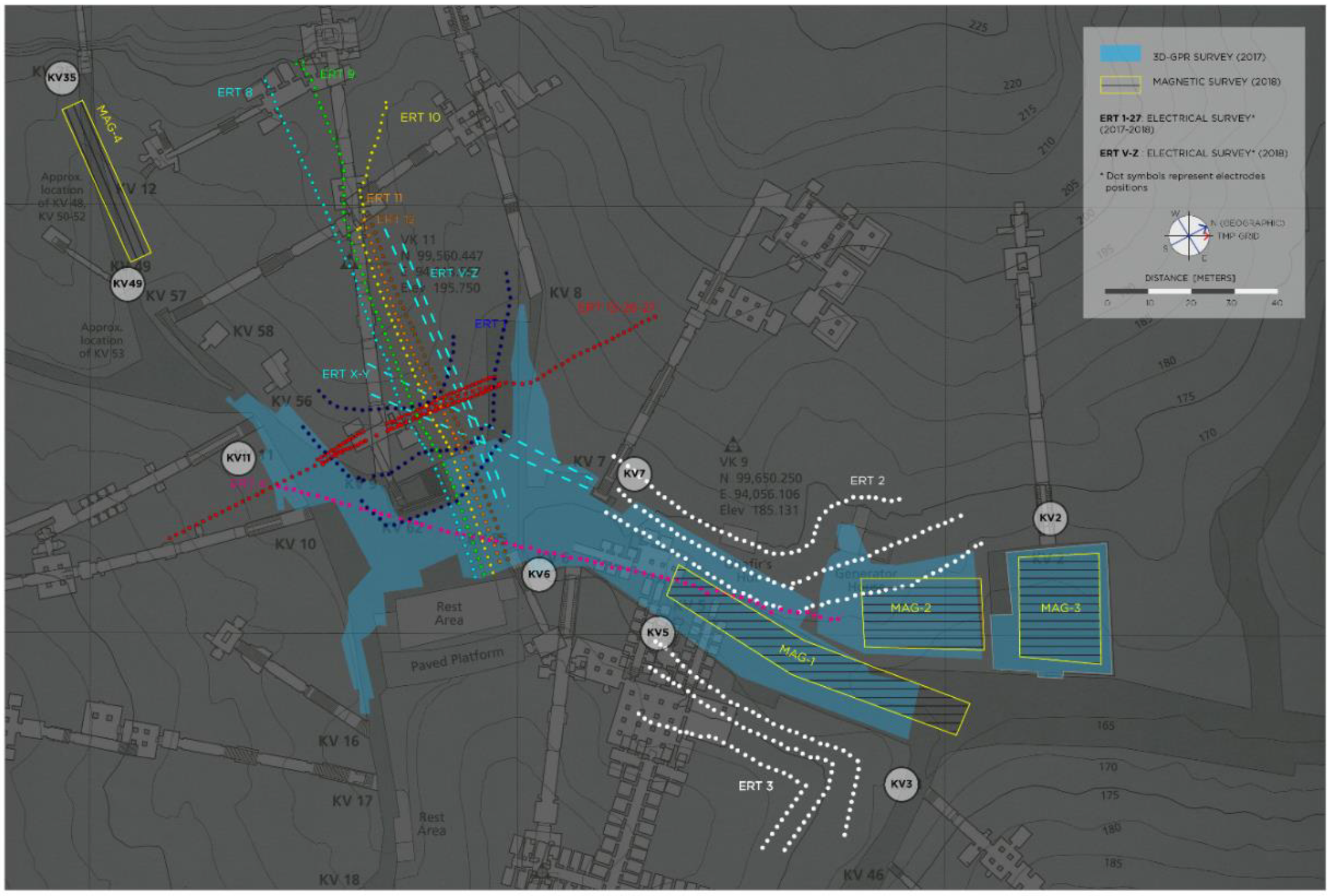
Figure 8.
Map of the geophysical surveys performed in the area which contribute to the presented results. The different colored lines refer to the different Electrical Resistivity Tomography (ERT) surveys executed.
Figure 8.
Map of the geophysical surveys performed in the area which contribute to the presented results. The different colored lines refer to the different Electrical Resistivity Tomography (ERT) surveys executed.
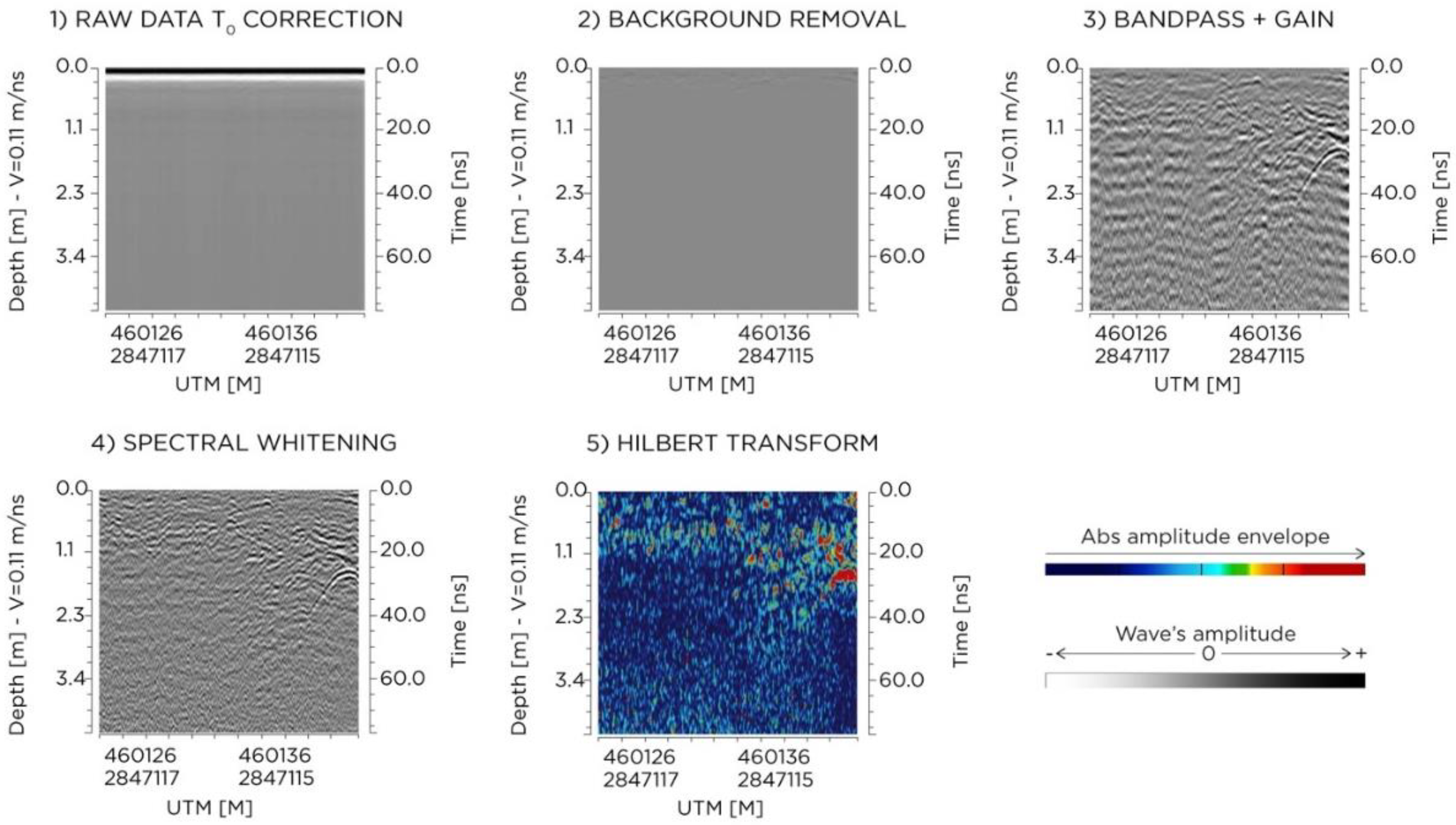
Figure 9.
Example of processing step effects on a single radargram.
Figure 9.
Example of processing step effects on a single radargram.
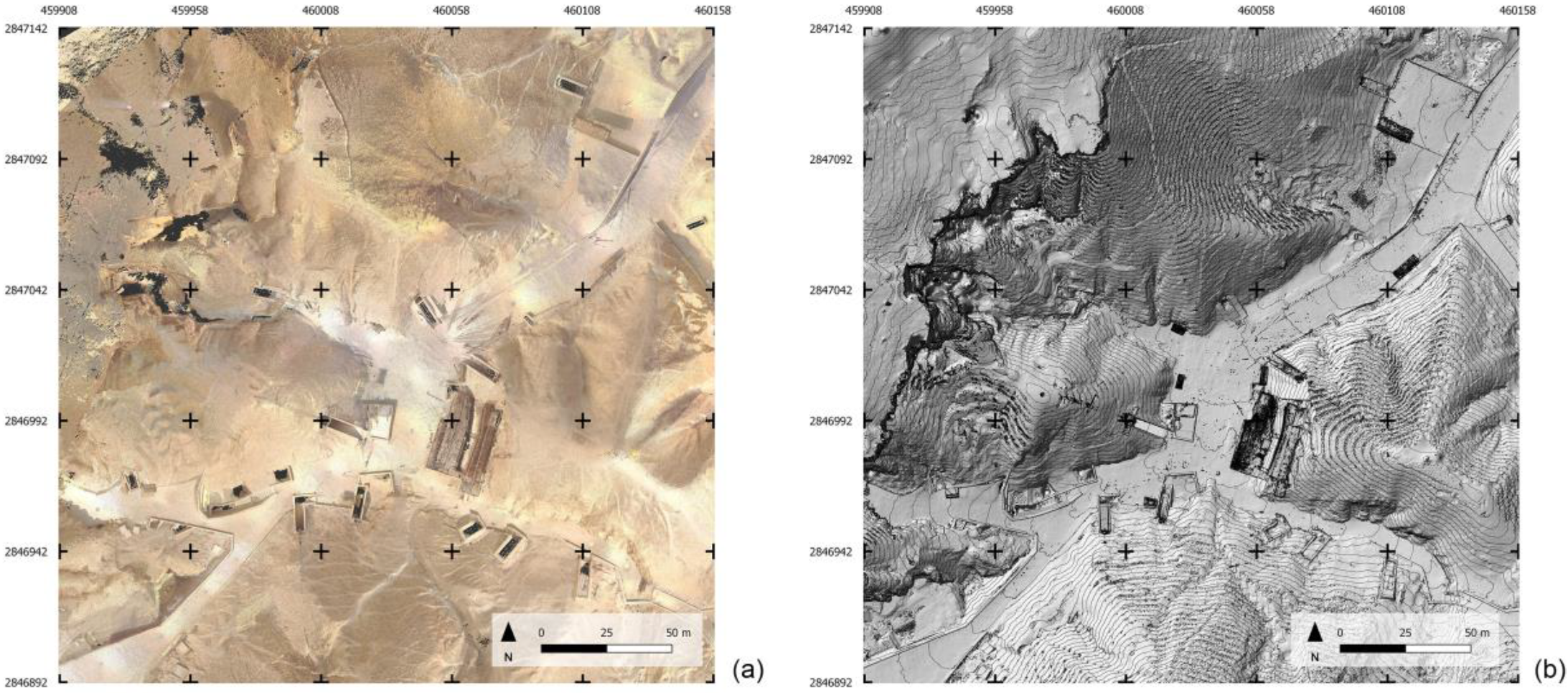
Figure 10.
Orthophoto generated from the terrestrial photogrammetry dataset (a); Digital Elevation Model (DEM) with contour lines generated from the TLS dataset (b).
Figure 10.
Orthophoto generated from the terrestrial photogrammetry dataset (a); Digital Elevation Model (DEM) with contour lines generated from the TLS dataset (b).
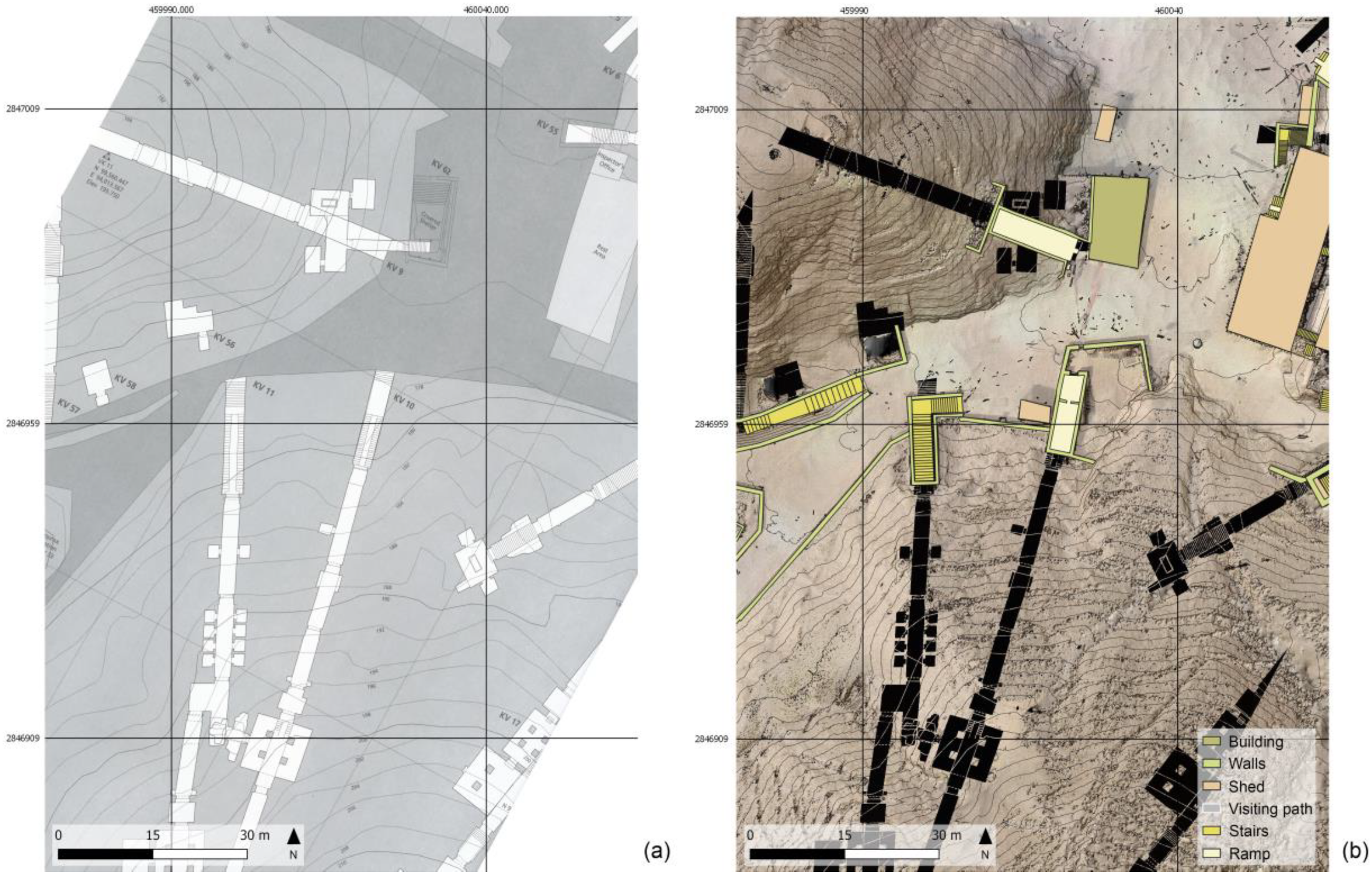
Figure 11.
Different survey products and underground tombs derived from the Theban mapping project sheets integrated into the Geographic Information System (GIS) environment. (a) Sheet 5/70, KV (3/4) extracted from the Atlas of the TMP, page 21, with superimposed the new global grid (50 m interval), Plan 1:400, Contour interval 2 m; (b) the corresponding area with the up-to-date geoinformation in GIS environment, Plan 1:100, contour interval 1 m, same global grid as on the left.
Figure 11.
Different survey products and underground tombs derived from the Theban mapping project sheets integrated into the Geographic Information System (GIS) environment. (a) Sheet 5/70, KV (3/4) extracted from the Atlas of the TMP, page 21, with superimposed the new global grid (50 m interval), Plan 1:400, Contour interval 2 m; (b) the corresponding area with the up-to-date geoinformation in GIS environment, Plan 1:100, contour interval 1 m, same global grid as on the left.
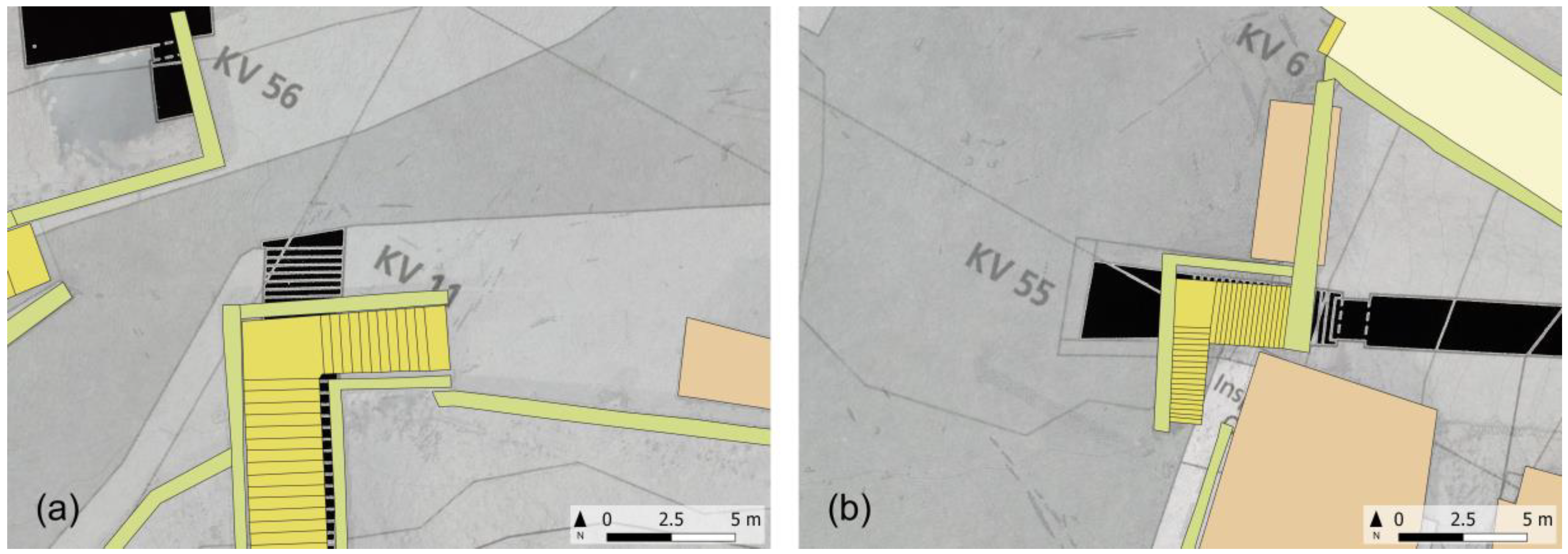
Figure 12.
Zooming in from the
Figure 11, upgraded mapping of modern artifacts concerning the entrance of KV11 (
a) and KV55 (
b) in comparison with the Theban Mapping Project.
Figure 12.
Zooming in from the
Figure 11, upgraded mapping of modern artifacts concerning the entrance of KV11 (
a) and KV55 (
b) in comparison with the Theban Mapping Project.
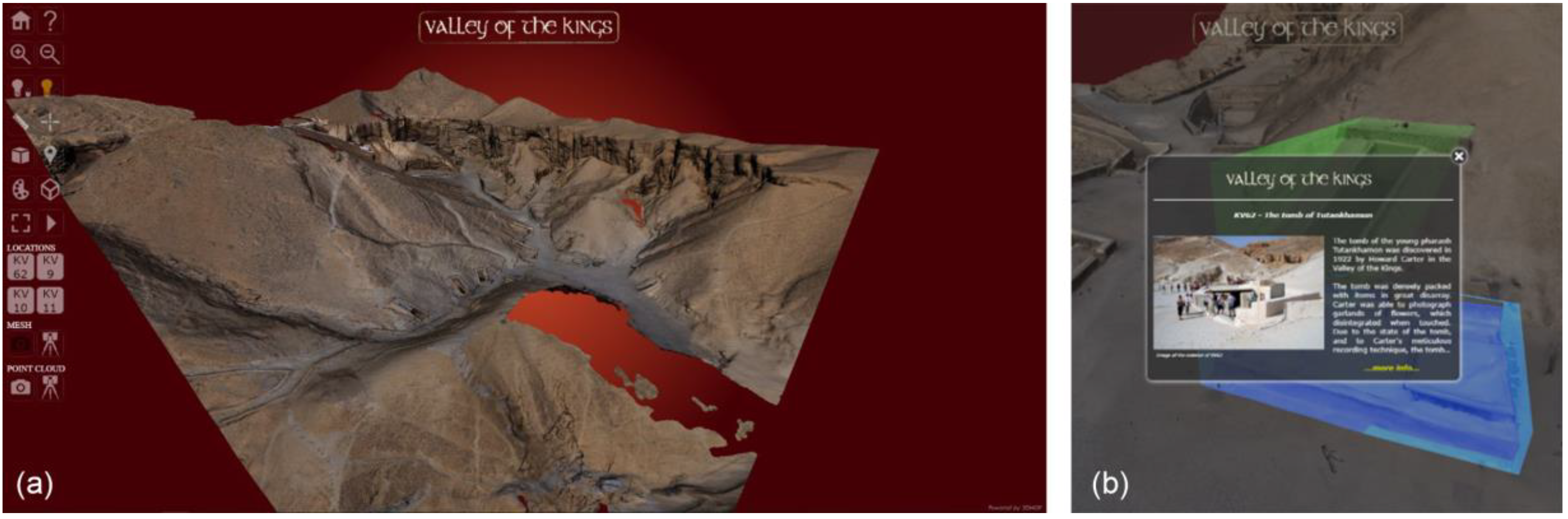
Figure 13.
Virtual visit of VOK: (a) interactive Web presentations of the high-resolution 3D model; (b) hot-Spot function embedded in the 3D viewer.
Figure 13.
Virtual visit of VOK: (a) interactive Web presentations of the high-resolution 3D model; (b) hot-Spot function embedded in the 3D viewer.
Figure 14.
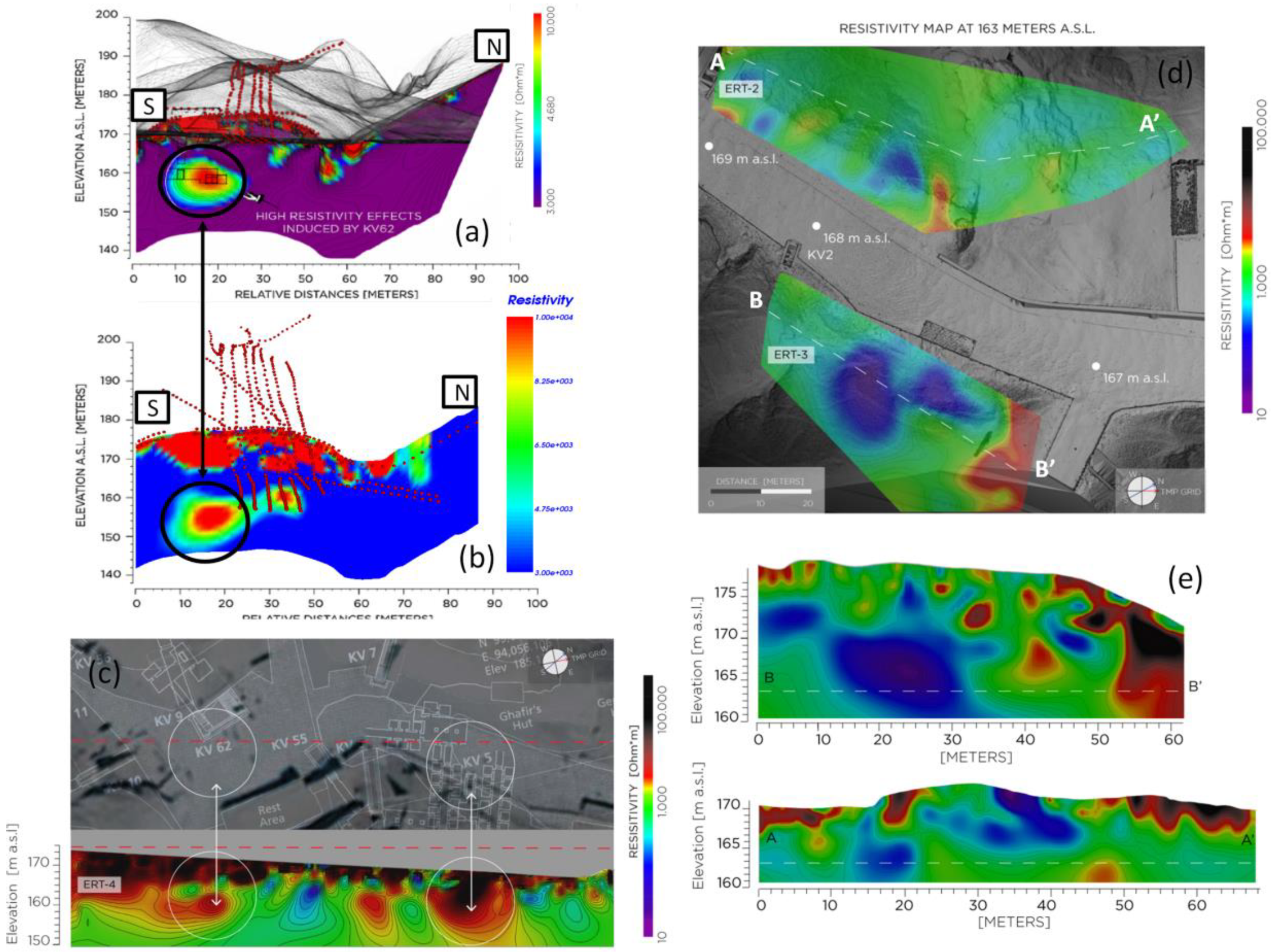
Results from ERT surveys: (a) and (b) representative cross-section of the 3D model over the KV62 tomb (a from 2017 surveys and b from 2018 surveys); (c) the electric resistivity variation reconstructed by ERT-4 and comparison with known voids. The electric resistivity variation reconstructed by ERT-2 and -3 shown by representative maps (d) and their associated cross-sections (e). Dashed white lines show where each map and its vertical section intersect.
Figure 14.
Results from ERT surveys: (a) and (b) representative cross-section of the 3D model over the KV62 tomb (a from 2017 surveys and b from 2018 surveys); (c) the electric resistivity variation reconstructed by ERT-4 and comparison with known voids. The electric resistivity variation reconstructed by ERT-2 and -3 shown by representative maps (d) and their associated cross-sections (e). Dashed white lines show where each map and its vertical section intersect.
Figure 15.
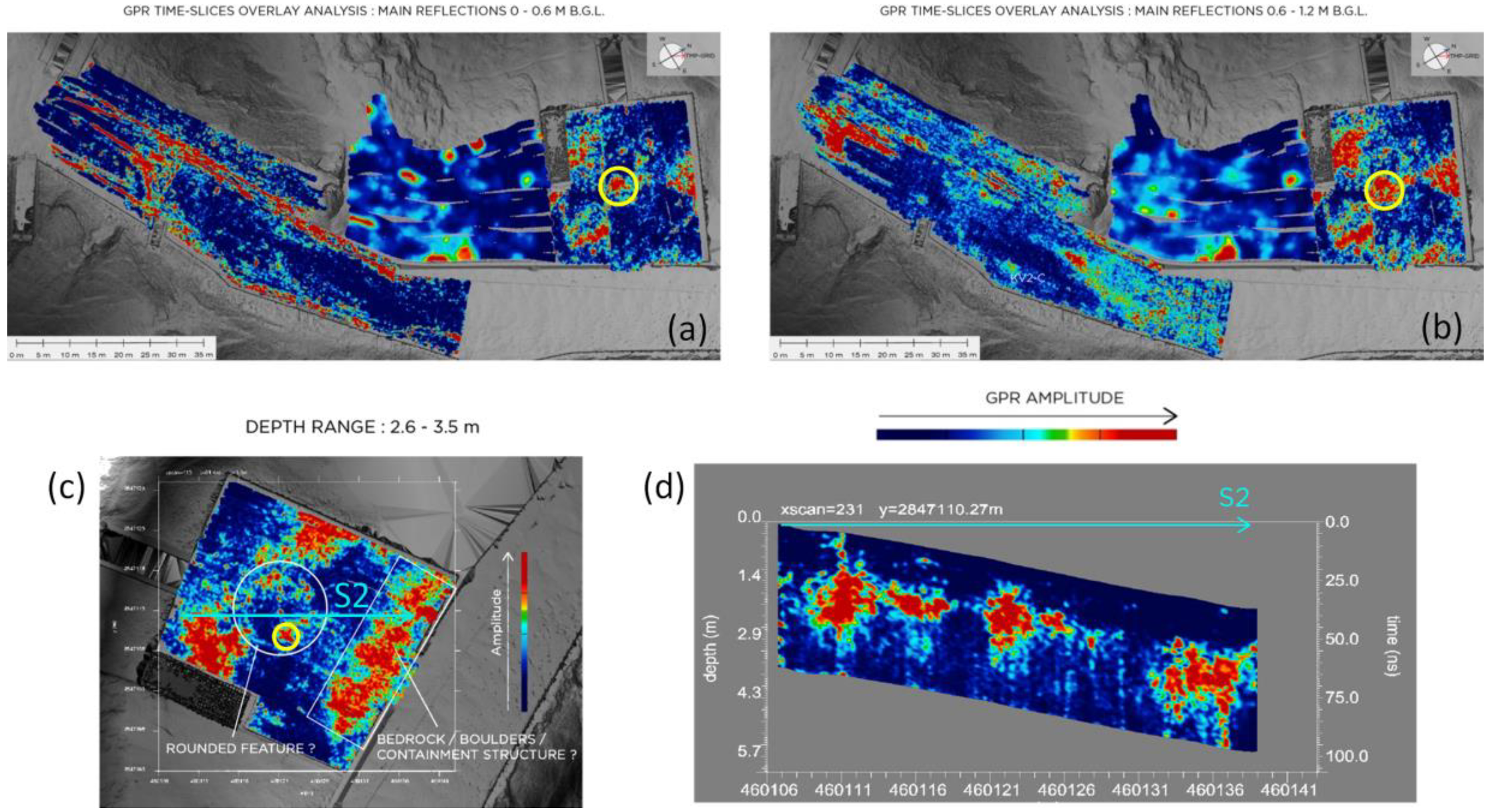
Results of GPR time slice overlay analysis over and around the KV2-A area. In (a) and (b) a sequence of time slices for two representative depth ranges is reported. In (c) and (d) a focus on the area in front of KV2 with: a time slice for a representative depth range (c) and the corresponding cross-section S2 (d) showing the distribution at depth of the main anomalies.
Figure 15.
Results of GPR time slice overlay analysis over and around the KV2-A area. In (a) and (b) a sequence of time slices for two representative depth ranges is reported. In (c) and (d) a focus on the area in front of KV2 with: a time slice for a representative depth range (c) and the corresponding cross-section S2 (d) showing the distribution at depth of the main anomalies.
Figure 16.
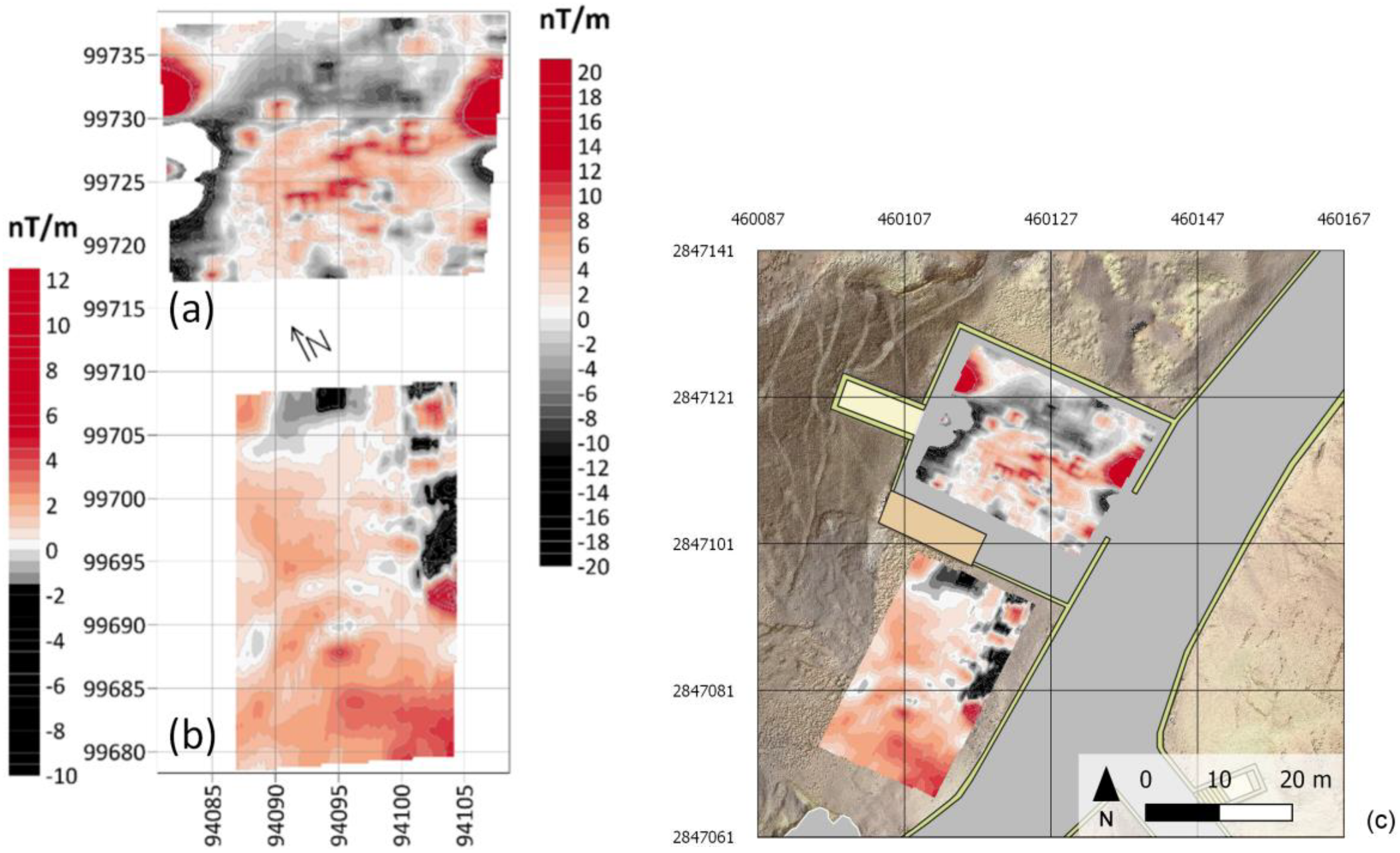
VGTMF map (local coordinates system) of (a) MAG-3 and (b) MAG-2 areas. The left color scale refers to MAG-2, the right color scale refers to MAG-3. The color scales have different ranges to enhance the peculiarity of the two areas. In (c) the same VGTMF maps are integrated in the geomatics GIS environment (georeferenced in the UTM WGS 84 system).
Figure 16.
VGTMF map (local coordinates system) of (a) MAG-3 and (b) MAG-2 areas. The left color scale refers to MAG-2, the right color scale refers to MAG-3. The color scales have different ranges to enhance the peculiarity of the two areas. In (c) the same VGTMF maps are integrated in the geomatics GIS environment (georeferenced in the UTM WGS 84 system).
Table 1.
Geomatics instruments used in the data acquisition phase.
Table 1.
Geomatics instruments used in the data acquisition phase.
| Type of Survey | Systems | Employed Sensors |
|---|
| Range-based | TLS | Faro® Focus3D X330 |
| MMS | GeoSLAM ZEB Revo |
| Image-based | DSLR cameras | Canon EOS 5DS R |
| Sony ILCE-7RM3 |
| Topography | GNSS | Geomax Zenith 35 |
| TS | LEICA NOVA M250 |
Table 2.
Coordinates of topographical vertcies characterized by the accuracies shown in the last three columns on the right.
Table 2.
Coordinates of topographical vertcies characterized by the accuracies shown in the last three columns on the right.
| Vertex | Est (m) | North (m) | Elevation (m) | RMSE (m) |
|---|
| Planimetric | Altimetric | Total |
|---|
| VK3 [fixed] | 460,203.524 | 2,847,082.428 | 210.444 | - | - | - |
| A2 | 460,222.492 | 2,846,847.688 | 215.056 | 0.002 | 0.003 | 0.003 |
| VK11 | 459,976.111 | 2,847,001.856 | 207.945 | 0.001 | 0.002 | 0.002 |
| VK12 | 459,898.698 | 2,846,839.672 | 213.886 | 0.002 | 0.003 | 0.003 |
| VK2 [fixed] | 460,123.102 | 2,846,977.174 | 210.864 | - | - | - |
| VK9 | 460,054.954 | 2,847,062.238 | 197.300 | 0.001 | 0.002 | 0.002 |
Table 3.
Main specifications of the Faro® Focus3D X330 scanner used for the Terrestrial Laser Scanning (TLS) survey.
Table 3.
Main specifications of the Faro® Focus3D X330 scanner used for the Terrestrial Laser Scanning (TLS) survey.
| Main Specifications of the Faro® Focus3D X330 Scanner | |
|---|
| Operational range | 0.6–330 (m) |
| Ranging error | ± 2 (mm) |
| Vertical/horizontal FoV (Field of View) | 300/360 (°) |
| RGB sensor (size of the final stitched image) | Up to 70 (Mpx) |
| Acquisition speed | Up to 976.000 (pt/s) |
Table 4.
Main specifications of the GeoSlam ZEB Revo RT platform used for the Mobile Mapping System (MMS) survey.
Table 4.
Main specifications of the GeoSlam ZEB Revo RT platform used for the Mobile Mapping System (MMS) survey.
| Specifications of the GeoSlam ZEB Revo RT Scanner | |
|---|
| Wavelength | 905 (nm) |
| Eye-safe laser | Class 1 |
| Laser speed (repetition rate) | 100 (Hz) |
| Laser lines | 100 (lines/s) |
| Scan speed | × 2.5 |
| Maximum range | 15–30 (m) |
| Points density | ~ 43,200 (pps) |
| 3D measurement declared accuracy | 2–3 cm (relative accuracy) |
| FoV | 270° HFOV/100° VFOV |
| Weight/portability (head + data logger) | ~ 2 (kg) |
Table 5.
Information concerning the quality of the photogrammetric processing, and the achieved accuracy, represented by the RMSE of the markers used for the generation of the photogrammetric model.
Table 5.
Information concerning the quality of the photogrammetric processing, and the achieved accuracy, represented by the RMSE of the markers used for the generation of the photogrammetric model.
| Average Distance (m) | Average GSD (mm/pix) | Coverage Area (km2) | Tie Points | Projections | Reprojection Error (pix) | Markers’ RMSE (m) |
|---|
| 104 | 8.5 | 0.04 | 719,697 | 2,351,918 | 0.937 pix | 0.015 |
Table 6.
Acquisition parameters of the Geomagnetic Surveys (GM) survey.
Table 6.
Acquisition parameters of the Geomagnetic Surveys (GM) survey.
| | GEM | MFAM |
|---|
| TMF/GRAD Sampling rate (S/s) | 5 | 1000 |
| Height of the lower sensor (m) | 0.3 | 0.3 |
| Height of the upper sensor (m) | 1.3 | 1 |
| Profile interval (m) | 0.25 | 0.25 |
Table 7.
Details concerning the extension of the MAG-3 and MAG-2 surveyed area.
Table 7.
Details concerning the extension of the MAG-3 and MAG-2 surveyed area.
| Site | Dimension (m × m) | Instrument | Area (m2) | n. of Profiles | Total Profile’s Length (m) |
|---|
| KV2a | ≈ 20.5 × 26.5 | MFAM | 545 | 83 | 2199 |
| KV2b | 18 × 30 | GEM + MFAM | 540 (×2) | 73 (×2) | 2190 (×2) |
| TOTAL | 1625 | 229 | 6579 |
Table 8.
Summary of the results of the gross statistical analysis performed on magnetic data in MAG-3 and MAG-2.
Table 8.
Summary of the results of the gross statistical analysis performed on magnetic data in MAG-3 and MAG-2.
| Area | Date | Begin (U.T.) | End (U.T.) | n. of Samples | Mean (nT) | St. Dev. (nT) | St. Dev. of Mean (nT) |
|---|
| MAG-3MAFM | Mon Oct 22 2018 | 14:35:47 | 15:25:46 | 1765244 | 4.195565 × 104 | 1.1234 × 102 | 8 × 10−2 |
| MAG-2 MAFM | Tue Oct 23 2018 | 04:28:05 | 05:10:42 | 1634117 | 4.199083 × 104 | 7.86 | 1 × 10−2 |
| MAG-2 GEM | Tue Oct 23 2018 | 05:44:51 | 06:47:03 | 11330 | 4.198193 × 104 | 6.89 | 7 × 10−2 |

 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}