A Framework for Agricultural Pest and Disease Monitoring Based on Internet-of-Things and Unmanned Aerial Vehicles



Abstract
1. Introduction
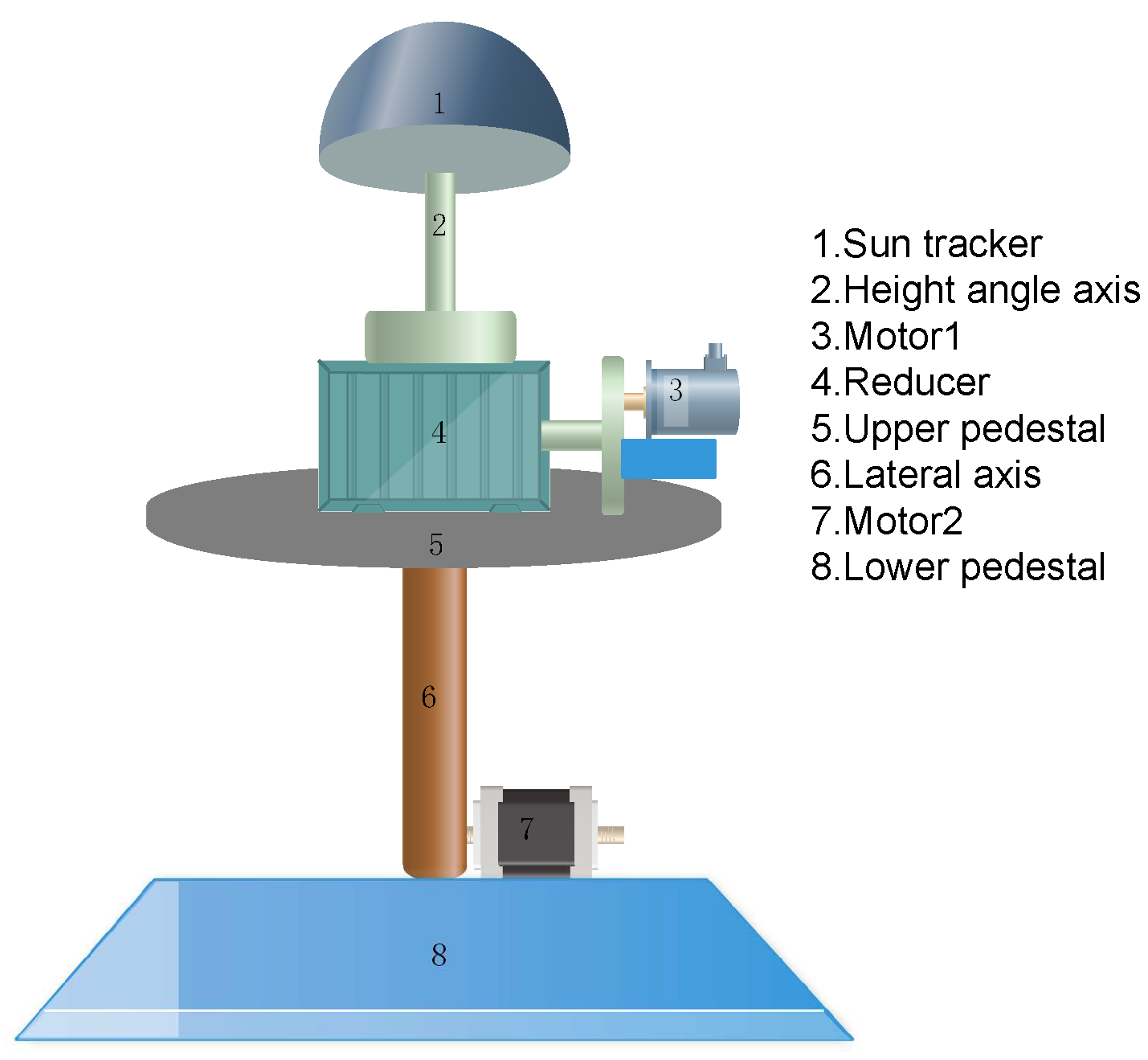
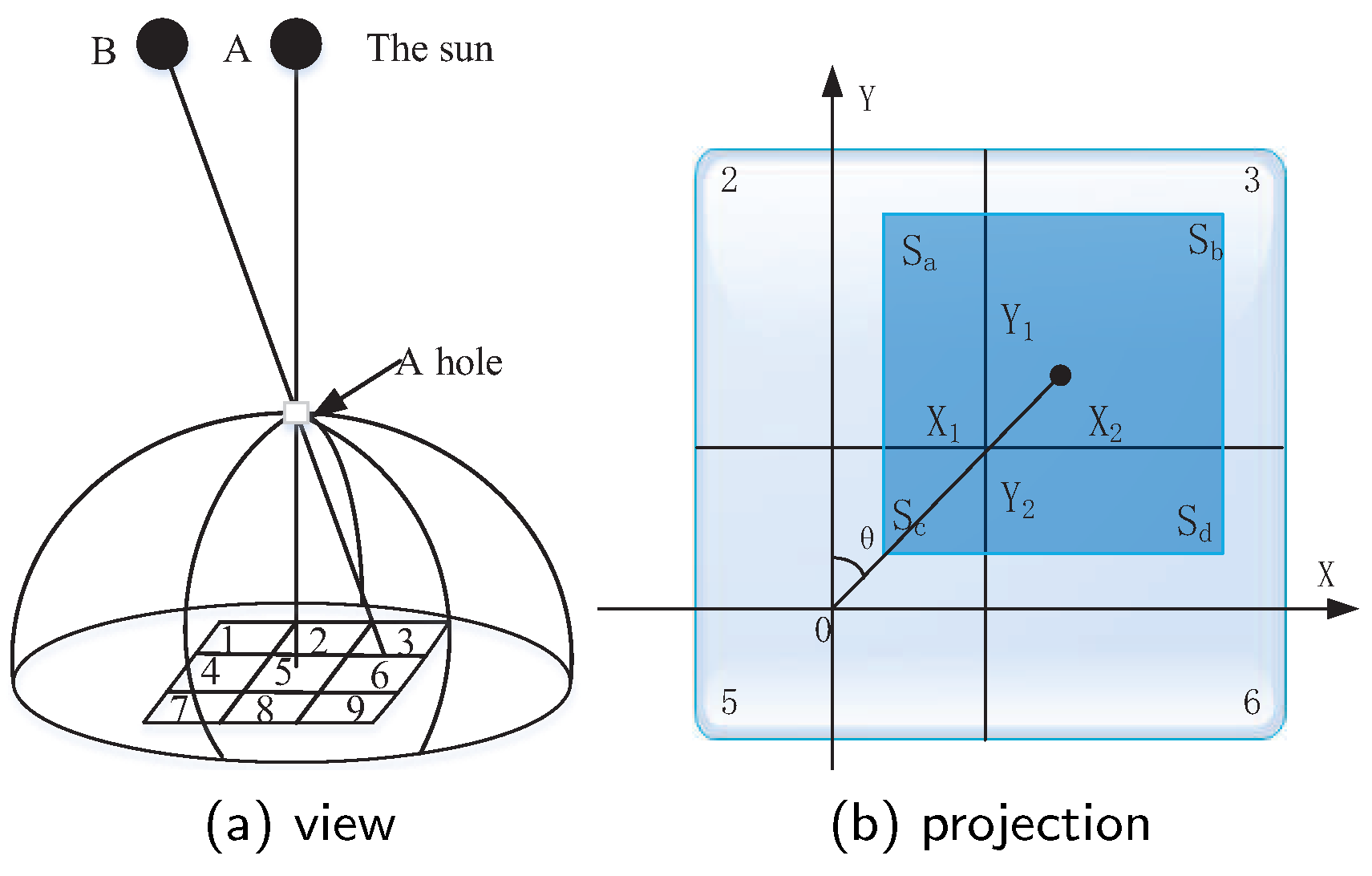
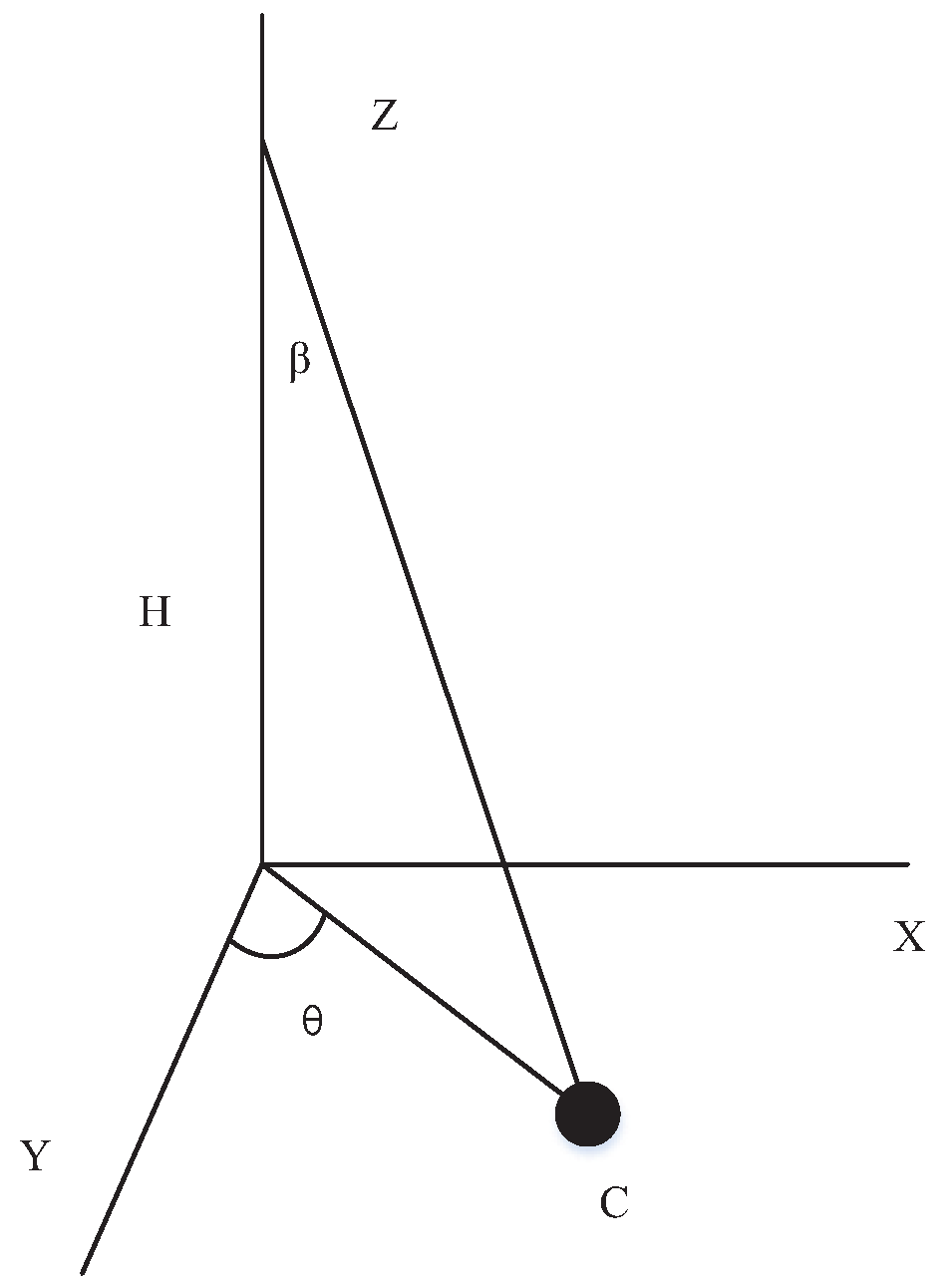
- An automatic rotary-device based on angle perception of sun illumination is designed for ensuring the solar panel is always perpendicular to sunlight and improving the energy-harvesting rate from solar power.
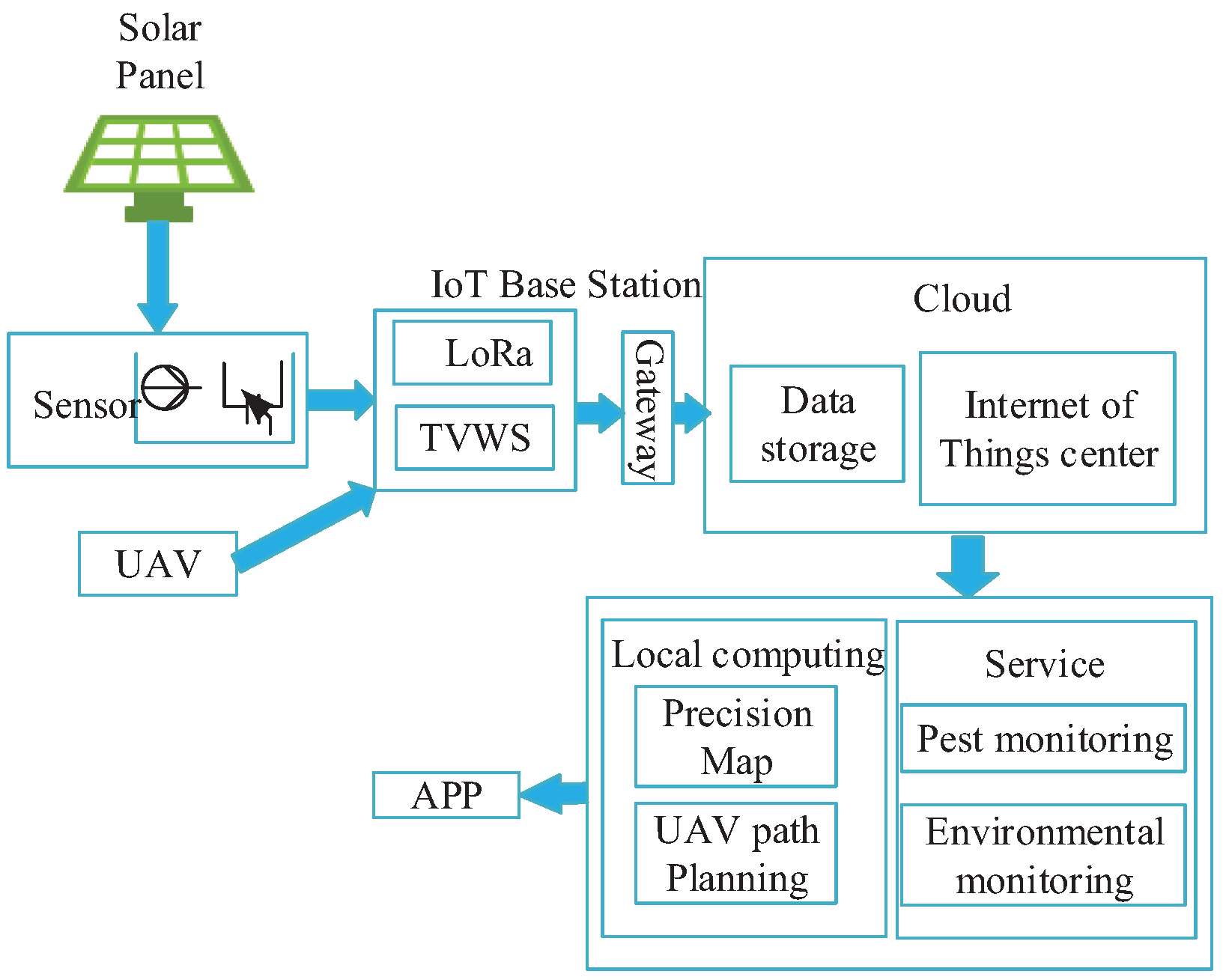
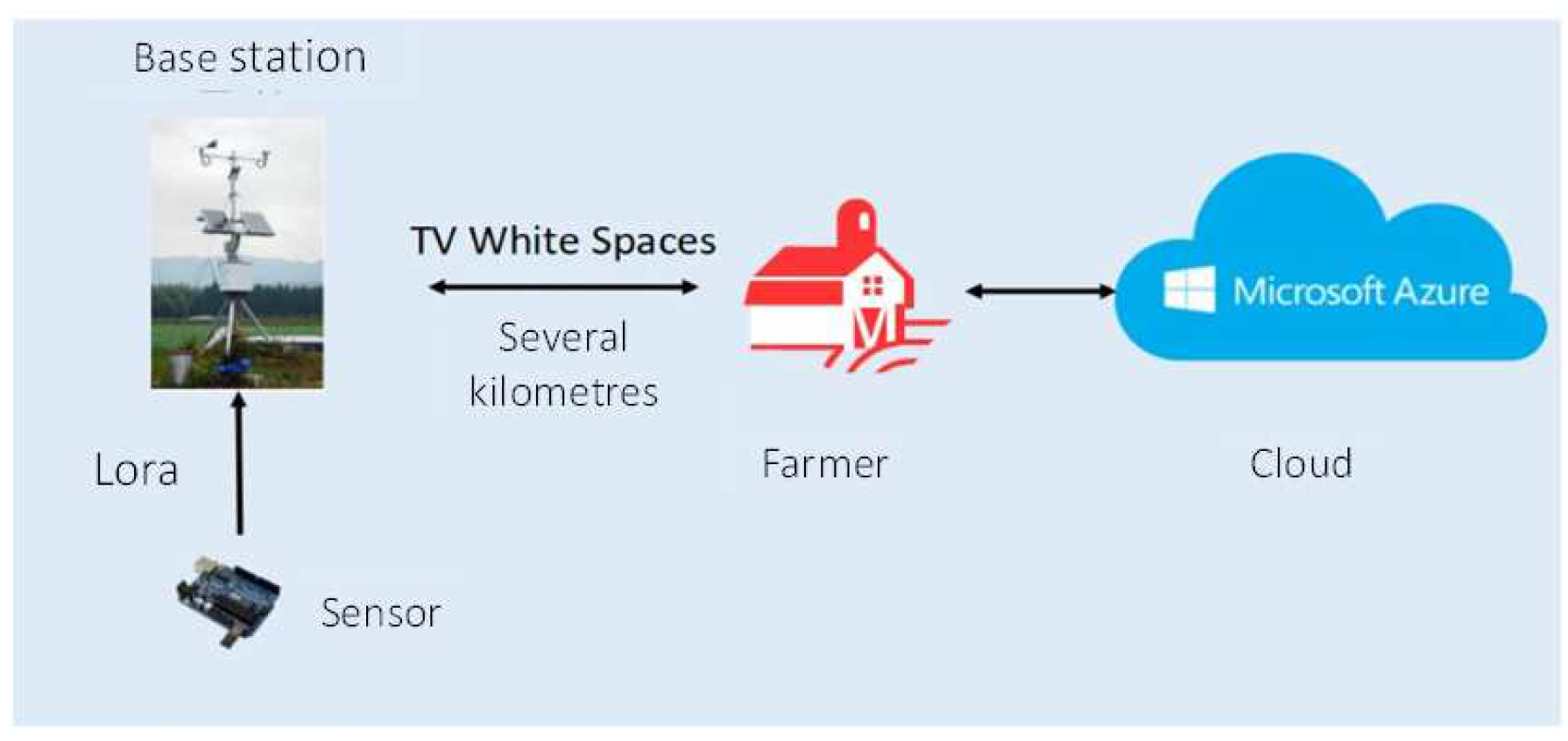
- An IoT framework containing multiple wireless technologies (e.g., LoRa, ZigBee, TVWS) is proposed for collecting information and transmitting the collected data to the base station/gateway.
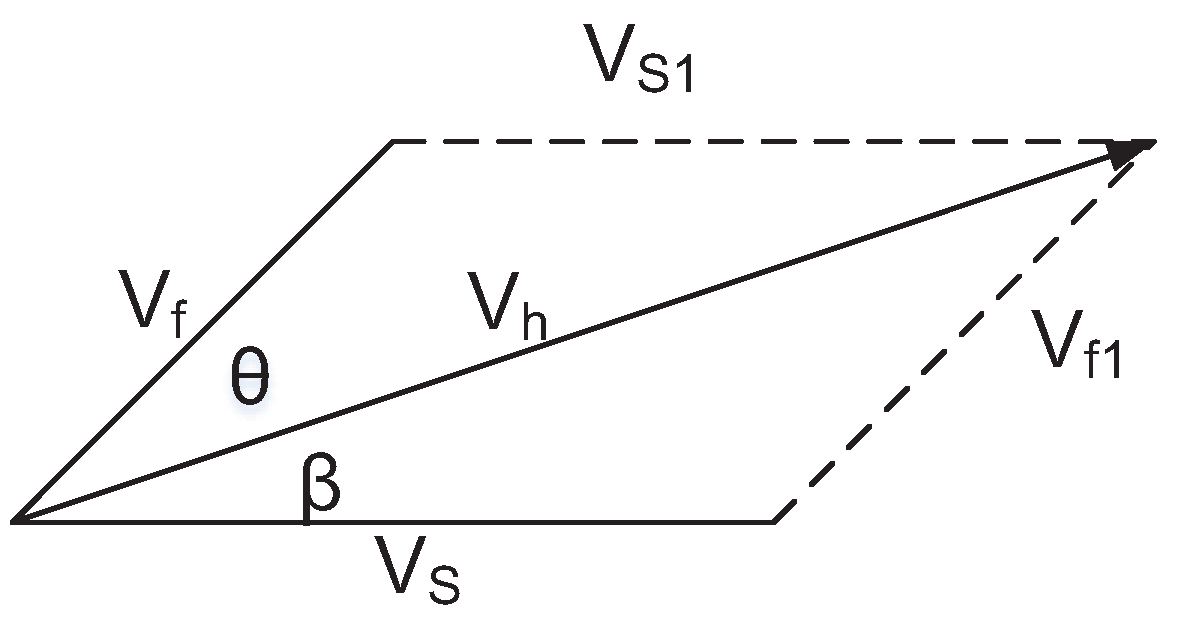
- A strategy to prolong the flight time of a drone is introduced by planning the flying path with the largest proportion of downwind and ensuring the maximum utilization of wind force.
2. Related Work
3. System Model
3.1. The Agricultural IoT Platform
3.2. Energy Supply Based on an Automatic Rrotary Alignment Device
3.3. Communication Systems of the Agricultural IoT Platform
3.4. The Path Planning of Unmanned Aerial Vehicle
4. Analysis
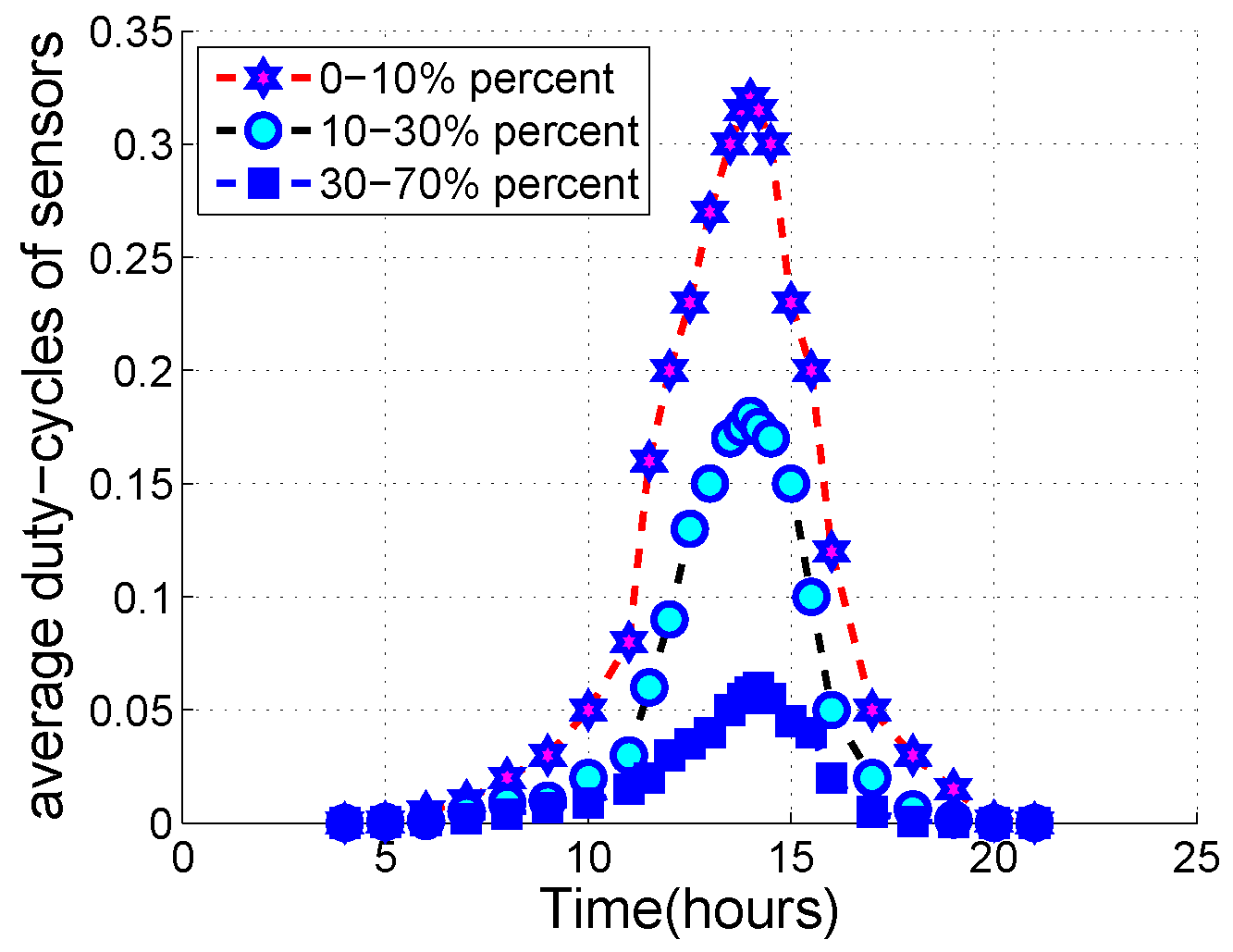
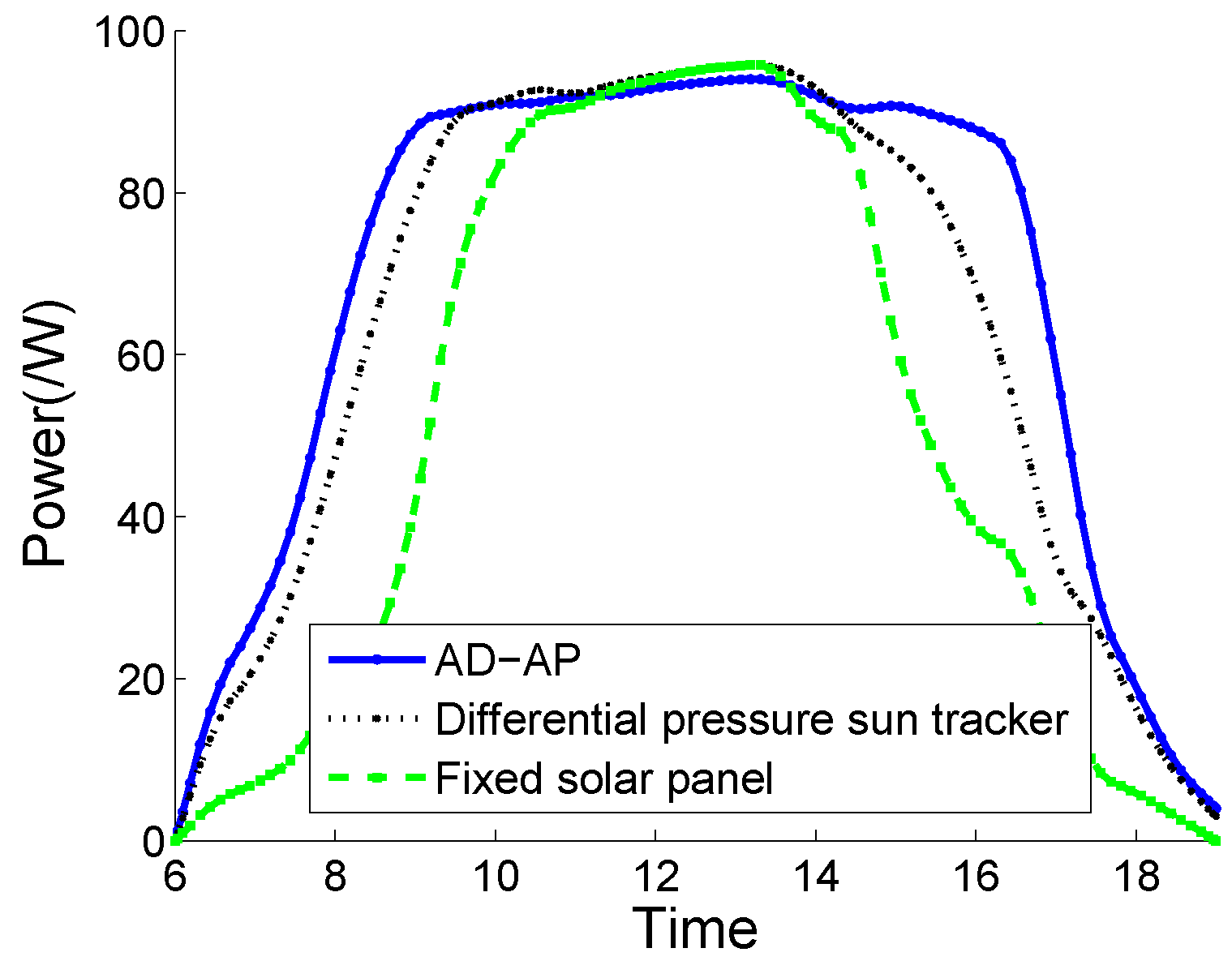
4.1. Energy Harvesting Analysis
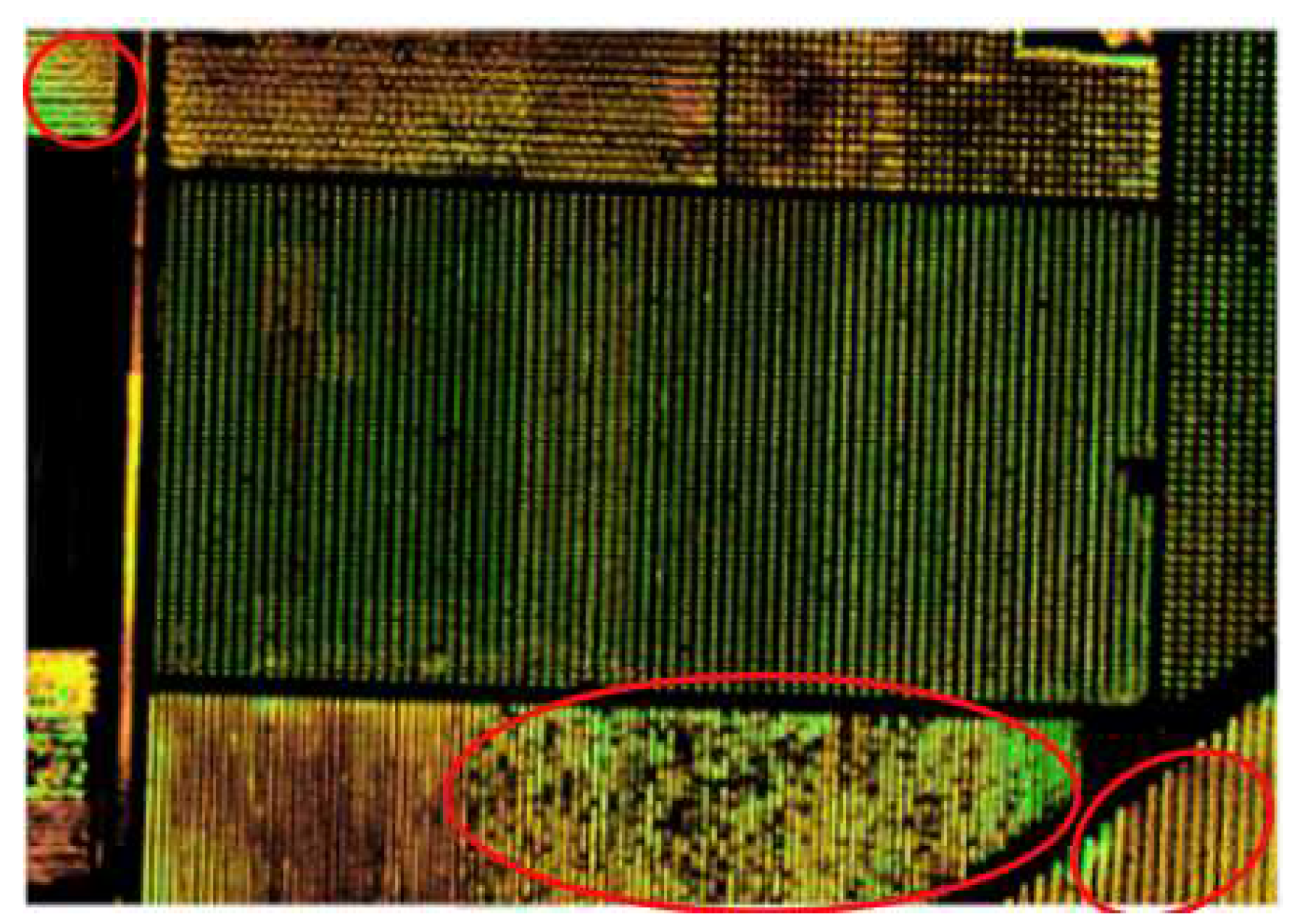
4.2. Generating Accurate Maps for Farms
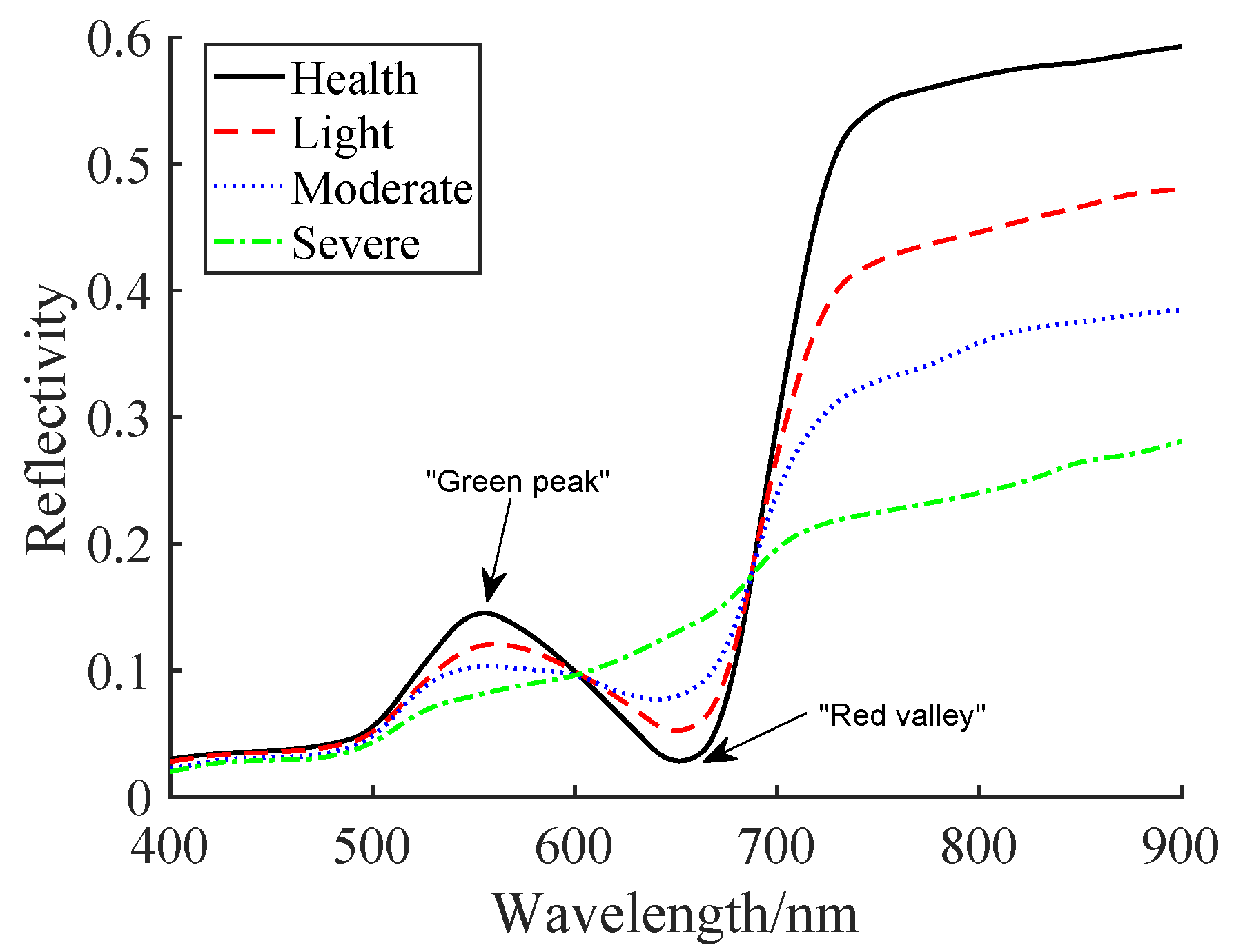
4.3. Pests and dIseases of Crops Are Analyzed Through Reflection Spectrum
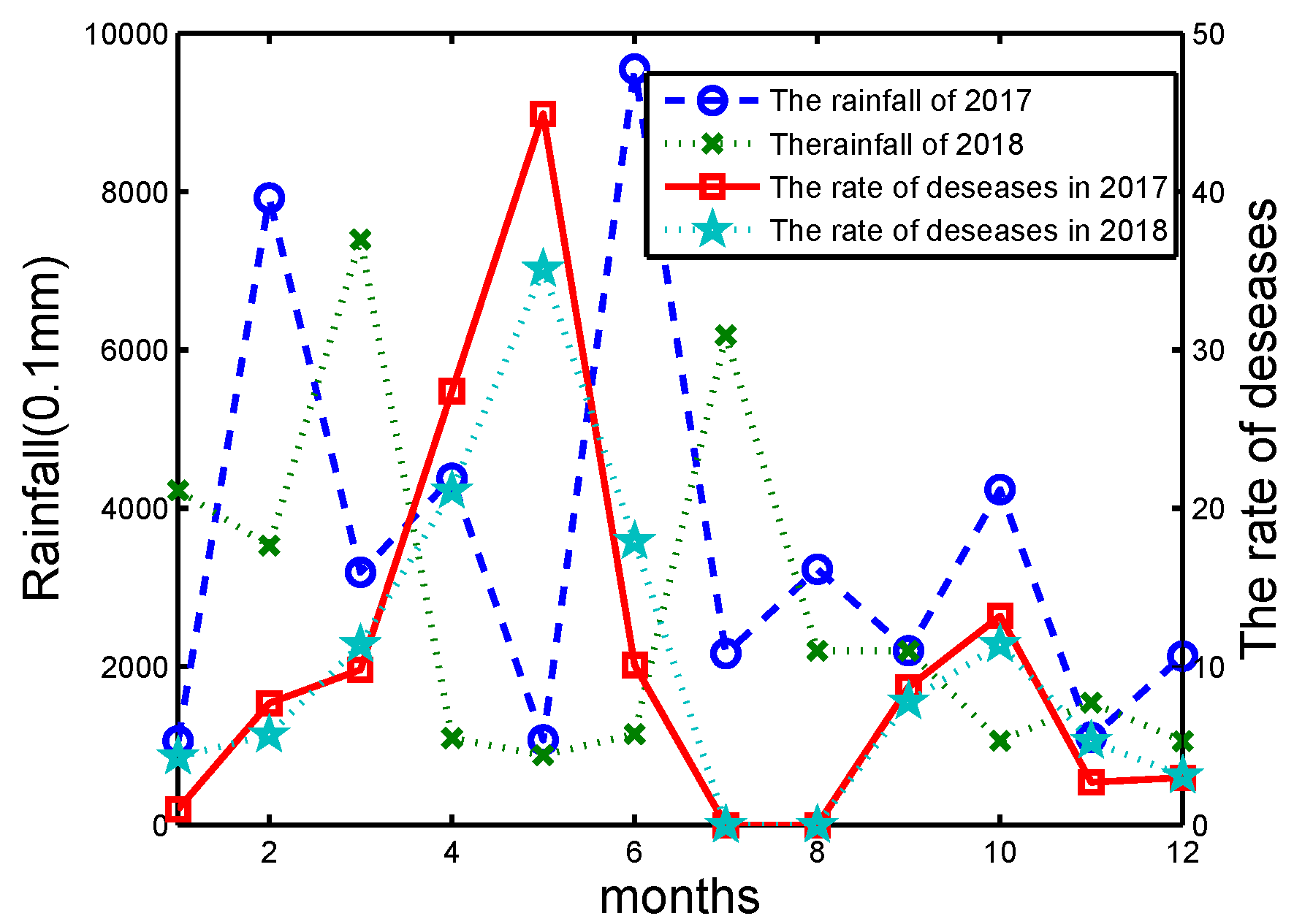
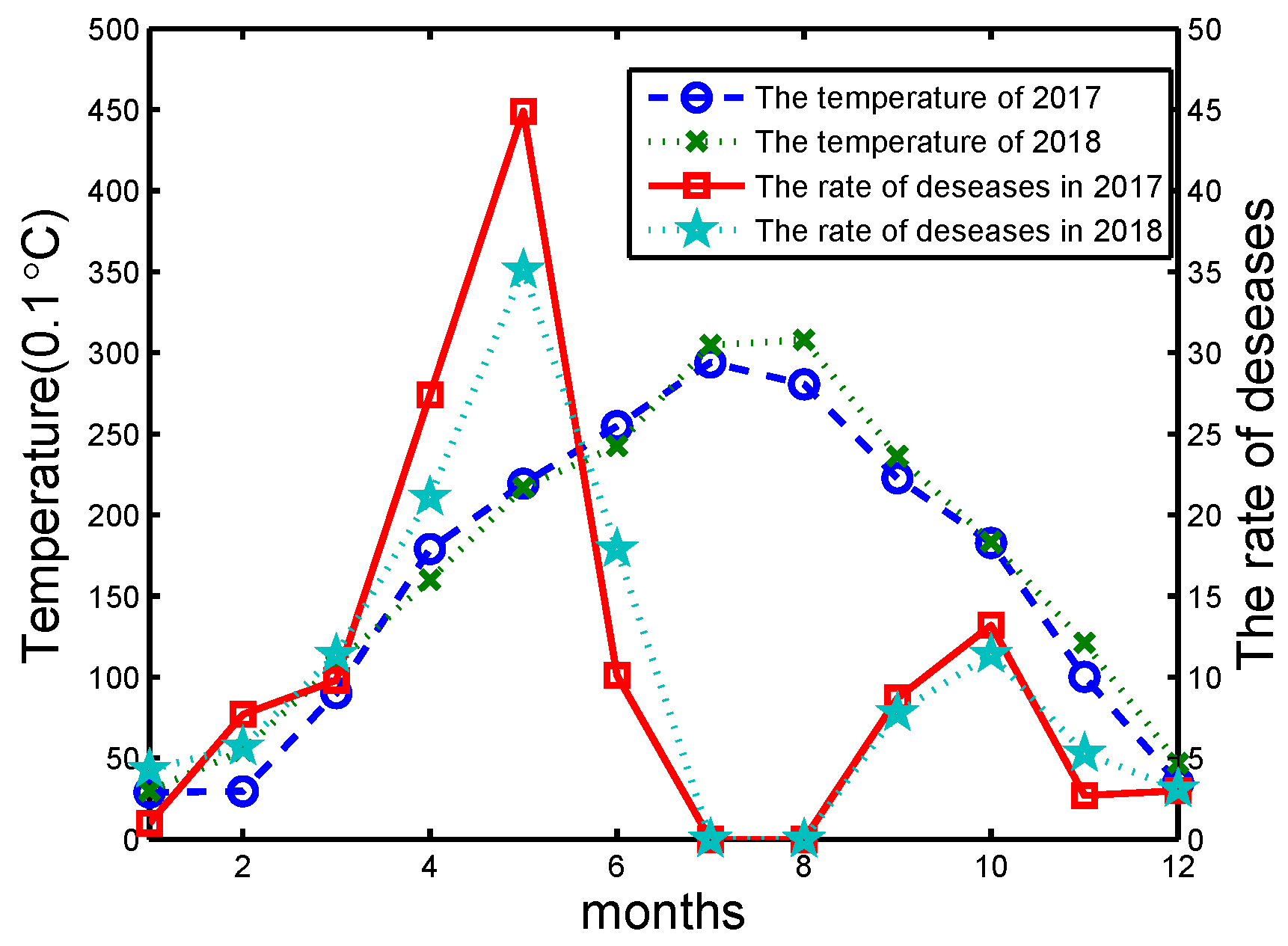
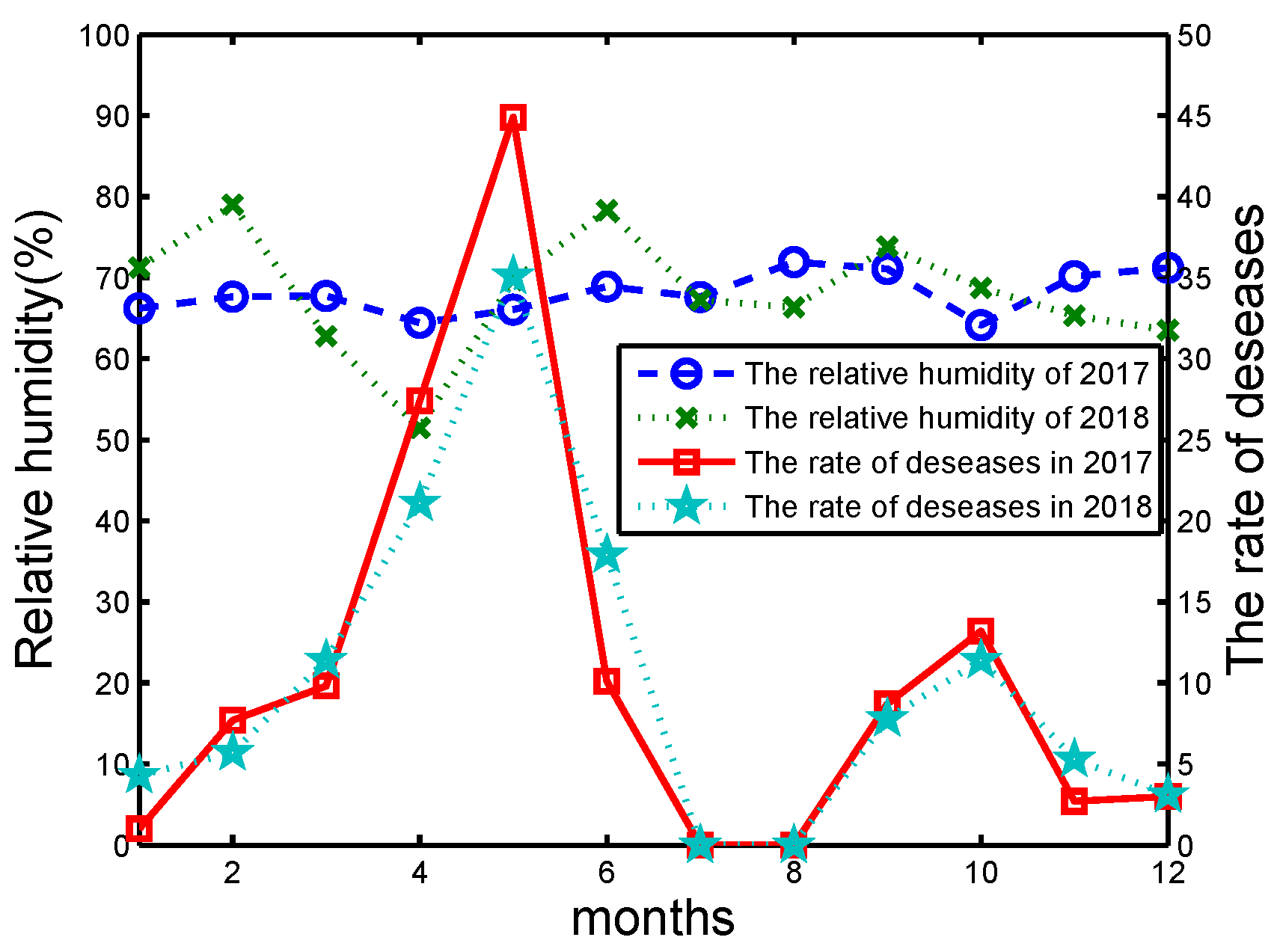
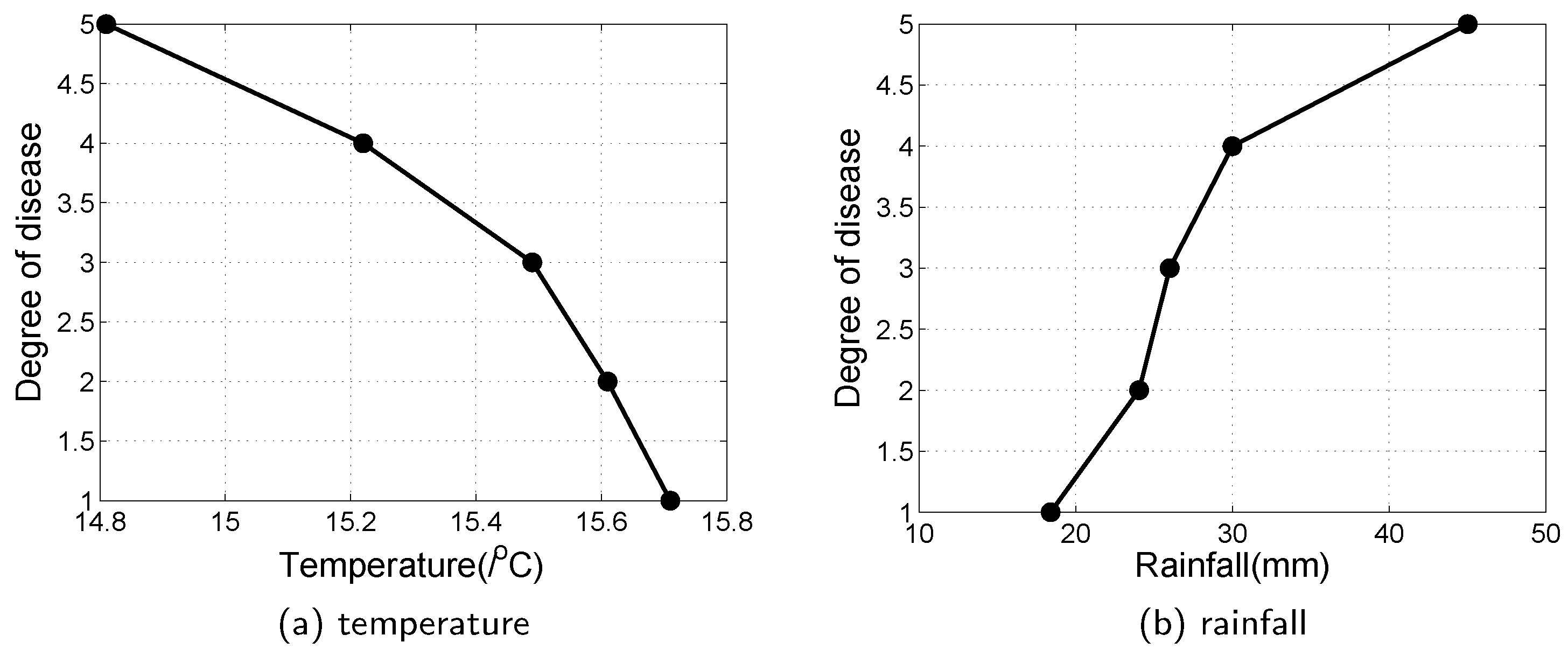
4.4. Relationship between Pests/Diseases and Weather Parameters
5. Conclusions And Future Planning
Author Contributions
Funding
Conflicts of Interest
References
- United Nations General Assembly. Food Production Must Double by 2050 to Meet Demand from Worlds Growing Population, Innovative Strategies Needed to Combat Hunger, Experts Tell Second Committee. Available online: http://www.un.org/press/en/2009/gaef3242.doc.htm (accessed on 9 October 2009).
- Dayan, M.P. Survey, identification and pathogenicity of pests and diseases of bamboo in the Philippines. Sylvatrop 1988, 13, 61–77. [Google Scholar]
- Guru-Pirasanna-Pandi, G.; Adak, T.; Gowda, B.; Patil, N.; Annamalai, M.; Jena, M. Toxicological effect of underutilized plant, Cleistanthus collinus leaf extracts against two major stored grain pests, the rice weevil, Sitophilus oryzae and red flour beetle, Tribolium castaneum. Ecotoxicol. Environ. Safe. 2018, 154, 92–99. [Google Scholar] [CrossRef]
- CCTV News, [EB/OL], Pests and Diseases Cause 40 Million Tons of Grain Loss Each Year in China. Available online: http://news.cctv.com/2017/02/11/ARTIPy3JBOkTuecw4r9lP7JF170211.shtml (accessed on 2 November 2017).
- Zheng, Q.; Huang, W.; Cui, X.; Shi, Y.; Liu, L. New Spectral Index for Detecting Wheat Yellow Rust Using Sentinel-2 Multispectral Imagery. Sensors 2018, 18, 868. [Google Scholar] [CrossRef]
- Li, X.; Pak, C.; Bi, K. Analysis of the development trends and innovation characteristics of Internet of Things technology-based on patentometrics and bibliometrics. Technol. Anal. Strateg. Manag. 2020, 32, 104–118. [Google Scholar] [CrossRef]
- Pan, X.; Wang, J.; Zhang, X.; Mei, Y.; Shi, L.; Zhong, G. A deep-learning model for the amplitude inversion of internal waves based on optical remote-sensing images. Int. J. Remote Sens. 2018, 39, 607–618. [Google Scholar] [CrossRef]
- Wang, B.; Li, N.; Li, W.; Hao, J. Application of 3S Technology to Land Consolidation in Chernozem Region of China. Comput. Comput. Technol. Agric. II 2009, 1, 145–153. [Google Scholar]
- Huang, Y.; Reddy, K.N.; Fletcher, R.S.; Pennington, D. UAV Low-Altitude Remote Sensing for Precision Weed Management. Weed Technol. 2018, 32, 1–5. [Google Scholar] [CrossRef]
- Wu, Y.; Chen, J.; Yao, S.; Xu, B. Application of UAV low-altitude remote sensing. Remote Sens. Land Resour. 2017, 29, 120–125. [Google Scholar]
- Bansod, B.; Singh, R.; Thakur, R.; Singhal, G. A comparision between satellite based and drone based remote sensing technology to achieve sustainable development: A review. J. Agric. Environ. Int. Dev. 2017, 111, 383–407. [Google Scholar]
- Wei, Z.; Han, Y.; Li, M.; Yang, K.; Yang, Y.; Luo, Y.; Ong, S.H. A small UAV based multi-temporal image registration for dynamic agricultural terrace monitoring. Int. J. Remote Sens. 2017, 9, 904. [Google Scholar] [CrossRef]
- Collier, R.H. Pest and Disease Prediction Models. Encycl. Appl. Plant Sci. 2017, 31, 120–123. [Google Scholar]
- Yan, X.; Cao, J.; Sun, L.; Zhou, J.; Wang, S.; Song, A. Accurate analytical-based multi-hop localization with low energy consumption for irregular networks. IEEE Trans. Veh. Technol. 2019, 69, 2021–2033. [Google Scholar] [CrossRef]
- Elijah, O.; Rahman, T.A.; Orikumhi, I.; Leow, C.Y.; Hindia, M.N. An overview of Internet of Things (IoT) and data analytics in agriculture: Benefits and challenges. IEEE Internet Things J. 2018, 5, 3758–3773. [Google Scholar] [CrossRef]
- Piano, S.L.; Mayumi, K. Toward an integrated assessment of the performance of photovoltaic power stations for electricity generation. Appl. Energy 2017, 186, 167–174. [Google Scholar] [CrossRef]
- Chung, W.Y.; Luo, R.H.; Chen, C.L.; Heythem, S.; Chang, C.F.; Po, C.C.; Li, Y.C. Solar powered monitoring system development for smart farming and Internet of Thing applications, Meeting Abstracts. Electrochem. Soc. 2019, 28, 1371–1375. [Google Scholar] [CrossRef]
- Liu, H.; Xu, X.; Meng, Y.; Yu, D.; Shi, K. A Research for the Influence of Tilt Angles of the Solar Panel on Photovoltaic Power Generation. In Proceedings of the 2018 International Conference on Smart Grid and Clean Energy Technologies (ICSGCE), Kajang, Malaysia, 6 December 2018; pp. 95–100. [Google Scholar]
- Donatelli, M.; Magarey, R.D.; Bregaglio, S.; Willocquet, L.; Whish, J.P.; Savary, S. Modelling the impacts of pests and diseases on agricultural systems. Agric. Syst. 2017, 155, 213–224. [Google Scholar] [CrossRef]
- Donatelli, M.; Magarey, R.D.; Bregaglio, S.; Willocquet, L.; Whish, J.P.; Savary, S. An early warning system of diseases and pests for blueberry based on WSN. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Liaoning, China, 26–28 July 2017. [Google Scholar]
- Yan, X.; Sun, L.; Sun, Z.; Zhou, J.; Song, A. Improved hop-based localisation algorithm for irregular networks. IET Commun. 2018, 13, 520–527. [Google Scholar] [CrossRef]
- Meissner, H.E.; Fritz, J.M.; Kohl, L.M.; Moylett, H.C.; Moan, M.J.; Emerine, S.E.; Kaye, A.C. PestLens: An early-warning system supporting US safeguarding against exotic plant pests. EPPO Bull. 2015, 45, 304–310. [Google Scholar] [CrossRef]
- Brust, G.E.; Gotoh, T. Mites: Biology, Ecology, and Management. In Sustainable Management of Arthropod Pests of Tomato; Academic Press: Cambridge, MA, USA, 2018; Volume 12, pp. 111–130. [Google Scholar]
- Vallad, G.E.; Messelink, G.J.; Smith, H.A. Crop Protection: Pest and Disease Management Tomatoes; CABI: Wallingford, UK, 2018; Volume 13, pp. 207–257. [Google Scholar]
- Swiergiel, W.; Manduric, S.; Ramert, B.; Porcel, M.; Tasin, M. Development of sustainable plant protection programs through multi-actor Co-innovation: An 8-year case study in Swedish apple production. J. Clean. Prod. 2019, 234, 1178–1191. [Google Scholar] [CrossRef]
- Yan, X.; Sun, L.; Zhou, J.; Song, A. DV-hop localisation algorithm based on optimal weighted least square in irregular areas. Electron. Lett. 2018, 54, 1243–1245. [Google Scholar] [CrossRef]
- Wang, S.; Kim, S.M.; Kong, L.; He, T. Concurrent transmission aware routing in wireless networks. IEEE Trans. Commun. 2018, 66, 6275–6286. [Google Scholar] [CrossRef]
- Gao, D.; Zhang, S.; Zhang, F.; Fan, X.; Zhang, J. Maximum Data Generation Rate Routing Protocol Based on Data Flow Controlling Technology for Rechargeable Wireless Sensor Networks. CMC-Comput. Mater. Cont. 2019, 59, 649–667. [Google Scholar] [CrossRef]
- Wang, S.; Basalamah, A.; Kim, S.M.; Guo, S.; Tobe, Y.; He, T. Link-correlation-aware opportunistic routing in wireless networks. IEEE Trans. Wirel. Commun. 2014, 14, 47–56. [Google Scholar] [CrossRef]
- Hang, S.; Gao, D.; Lin, H.; Sun, Q. Wildfire detection using sound spectrum analysis based on the internet of things. Sensors 2019, 19, 5093–5113. [Google Scholar]
- Zhuhua, H.; Yaochi, Z. Construction and application of intelligent video monitoring system for agricultural diseases and insect pests. J. Chin. Agric. Mechan. 2016, 31, 42–43. [Google Scholar]
- Wang, J.; Chu, M.; Ma, Y. Measuring rice farmer’s pesticide overuse practice and the determinants: A statistical analysis based on data collected in Jiangsu and Anhui Provinces of China. Sustainability 2018, 10, 677. [Google Scholar] [CrossRef]
- Ma, J.; Zhang, X.Y. Application of Internet of Things Technology in Monitoring and Early Warning of Diseases and Pests in Ningxia. Forest Investig. Plan. 2018, 43, 71–74. [Google Scholar]
- Dimitrios, P.; Konstantinos, A. SensoTube: A Scalable Hardware Design Architecture for Wireless Sensors and Actuators Networks Nodes in the Agricultural Domain. Sensors 2016, 16, 1227–1246. [Google Scholar]
- Vanegas, F.; Bratanov, D.; Powell, K.; Weiss, J.; Gonzalez, F. A Novel Methodology for Improving Plant Pest Surveillance in Vineyards and Crops Using UAV-Based Hyperspectral and Spatial Data. Sensors 2018, 18, 260. [Google Scholar] [CrossRef]
- Yuan, L.; Zhang, J.; Wang, J. Research progress of crop diseases and pests monitoring-based on remote sensing. Trans. Chin. Soc.Agric. Eng. 2012, 28, 1–11. [Google Scholar]
- Rademacher, W. Plant growth regulators: backgrounds and uses in plant production. J. Plant Growth Regul. 2015, 34, 845–872. [Google Scholar] [CrossRef]
- Christiansen, M.P.; Laursen, M.S.; Jargensen, R.N.; Skovsen, S.; Gislum, R. Designing and Testing a UAV Mapping System for Agricultural Field Surveying. Sensors 2017, 17, 2703–2723. [Google Scholar] [CrossRef] [PubMed]
- Vazquez-Arellano, M.; Griepentrog, H.W.; Reiser, D.; Paraforos, D.S. 3-D Imaging Systems for Agricultural Applications-A Review. Sensors 2016, 16, 618–636. [Google Scholar] [CrossRef] [PubMed]
- Cheng, X.; Zhang, Y.H.; Wu, Y.Z.; Yue, Y. Agricultural pests tracking and identification in video surveillance based on deep learning. In Proceedings of the International Conference on Intelligent Computing; Springer: Cham, Switzerland, 2017; pp. 58–70. [Google Scholar]
- Polo, J.; Hornero, G.; Duijneveld, C.; Garcia, A.; Casas, O. Design of a low-cost Wireless Sensor Network with UAV mobile node for agricultural applications. Comput. Electron. Agric. 2015, 119, 19–32. [Google Scholar] [CrossRef]
- Tongle, H.; Yuxin, Z.; Shutong, W. Construction and implementation of China-blight: a monitoring and warning system on potato late blight in China. Plant Prot. 2010, 5, 135–143. [Google Scholar]
- Bai, J.; Xu, G.; Zhou, T.; Zhao, Z. Study on temporal distribution and trend prediction of rice plant diseases and insect pests in Chongqing Municipality. J. Nat. Disasters 2016, 21, 3–4. [Google Scholar]
- Shi, X.; An, X.; Zhao, Q.; Liu, H.; Xia, L.; Sun, X.; Guo, Y. State-of-the-art internet of things in protected agriculture. Sensors 2019, 19, 1833. [Google Scholar] [CrossRef]
- Kamilaris, A.; Prenafeta-Boldu, F.X. A review on the practice of big data analysis in agriculture. Comput. Electron. Agric. 2017, 143, 23–37. [Google Scholar] [CrossRef]
- Osborne, L.F.; Shaw, B.L.; Mewes, J.J.; Salentiny, D.M. Continual Crop Development Profiling Using Dynamical Extended Range Weather Forecasting With Routine Remotely-Sensed Validation Imagery. U.S. Patent 10,241,098, 26 March 2019. [Google Scholar]
- Salgado-Salazar, C.; Shiskoff, N.; Daughtrey, M.; Palmer, C.L.; Crouch, J.A. Downy mildew: A serious disease threat to rose health worldwide. Plant Dis. 2018, 102, 1873–1882. [Google Scholar] [CrossRef]
- China’s 4G Network Users Grow to 1.24 billion[EB/OL]. Available online: http://english.cqnews.net/html/2019-08/29/content_50648950.htm (accessed on 29 August 2019).
- Gao, D.; Liu, Y.; Zhang, F.; Song, J. Anycast routing protocol for forest monitoring in rechargeable wireless sensor networks. Int. J. Distrib. Sens. Netw. 2013, 9, 239860. [Google Scholar] [CrossRef]
- OpenWeatherMap, Inc. OpenWeather API. Available online: http://openweathermap.org/ (accessed on 1 January 2010).
- Gao, D.; Zhang, S.; Zhang, F.; He, T.; Zhang, J. RowBee: A Routing Protocol Based on Cross-Technology Communication for Energy-Harvesting Wireless Sensor Networks. IEEE Access 2019, 7, 40663–40673. [Google Scholar] [CrossRef]
- Al-Rubaye, M.J.M.; Ali, A.; Chisab, R. A smart monitoring and controlling for agricultural pumps using LoRa IOT technology. Indones. J. Electri. Eng. Comput. Sci. 2019, 13, 286–292. [Google Scholar]
- Zhang, Y.; Chen, Z.; Dong, F.; Chen, B. Maritime wireless broadband communication system based on TVWS. In Proceedings of the 2015 4th International Conference on Mechatronics, Materials, Chemistry and Computer Engineering, Mechatronics, Materials; Atlantis Press: Paris, France, 2015. [Google Scholar]
- Lin, W.; Deng, G.; Wang, T.; Sun, L.; Du, L. A self-calibrating sun tracker based on a differential pressure control system. In Proceedings of the 2013 International Conference on Materials for Renewable Energy and Environment, Chengdu China, 6 August 2014; pp. 450–453. [Google Scholar]
- Xu, X. Gaussian process regression method and its prediction model. Sci. Technol. Inf. 2016, 14, 97–99. [Google Scholar]
- Blaaberg, S.; Like, T.; Baarstad, I.; Fridman, A.; Koirala, P. HySpex ODIN-1024: A new high-resolution airborne HSI system. In Infrared Technology and Applications XL; International Society for Optics and Photonics: Pittsfield, MA, USA, 10 June 2014. [Google Scholar]
- Ding, Y.J.; Li, M.Z.; Li, S.Q.; An, D.K. Predicting chlorophyll content of greenhouse tomato with ground-based remote sensing. In Multispectral, Hyperspectral, and Ultraspectral Remote Sensing Technology, Techniques, and Applications III; International Society for Optics and Photonics: Bellingham, WA, USA, 2010; Volume 7857, p. 785715. [Google Scholar]
- Granke, L.L.; Quesada-Ocampo, L.; Lamour, K.; Hausbeck, M.K. Advances in research on Phytophthora capsici on vegetable crops in the United States. Plant Dis. 2012, 96, 1588–1600. [Google Scholar] [CrossRef] [PubMed]
- Chen, P.C.; Zhang, J.H.; Lei, Y.H. Research Progress of Hyperspectral Remote Sensing for Monitoring Crop Diseases and Pests. Chin. Agric. Sci. Bull. 2006, 22, 388. [Google Scholar]
- Juroszek, P.; Tiedemann, A. Linking plant disease models to climate change scenarios to project future risks of crop diseases: A review. J. Plant Diseases Prot. 2015, 122, 3–15. [Google Scholar] [CrossRef]
- Erlina, A.; Istas, P.; Adhi, D.W. Expert system for diagnosis pests and diseases of the rice plant using forward chaining and certainty factor method. In Proceedings of the 2017 International Seminar on Intelligent Technology and Its Applications (ISITIA), Surabaya, Indonesia, 28–29 August 2017. [Google Scholar]
- Larsolle, A.; Muhammed, H.H. Measuring crop status using multivariate analysis of hyperspectral field reflectance with application to disease severity and plant density. Precis. Agric. 2007, 8, 37–47. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| the wind speed on the farm | |
| the actual flight speed, which combination of | |
| the speed of drone and the wind | |
| the planing flight speed of the drone | |
| the angle between and | |
| the angle between and |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, D.; Sun, Q.; Hu, B.; Zhang, S. A Framework for Agricultural Pest and Disease Monitoring Based on Internet-of-Things and Unmanned Aerial Vehicles. Sensors 2020, 20, 1487. https://doi.org/10.3390/s20051487
Gao D, Sun Q, Hu B, Zhang S. A Framework for Agricultural Pest and Disease Monitoring Based on Internet-of-Things and Unmanned Aerial Vehicles. Sensors. 2020; 20(5):1487. https://doi.org/10.3390/s20051487
Chicago/Turabian StyleGao, Demin, Quan Sun, Bin Hu, and Shuo Zhang. 2020. "A Framework for Agricultural Pest and Disease Monitoring Based on Internet-of-Things and Unmanned Aerial Vehicles" Sensors 20, no. 5: 1487. https://doi.org/10.3390/s20051487
APA StyleGao, D., Sun, Q., Hu, B., & Zhang, S. (2020). A Framework for Agricultural Pest and Disease Monitoring Based on Internet-of-Things and Unmanned Aerial Vehicles. Sensors, 20(5), 1487. https://doi.org/10.3390/s20051487