An Empirical Study on Transmission Beamforming for Ultrasonic Guided-Wave Based Structural Health Monitoring

 , , and
, , and
Abstract
1. Introduction
2. Phased-Array Systems for Beamforming
2.1. Background of Beamforming Techniques
2.2. Transmission Beamforming Fundamentals
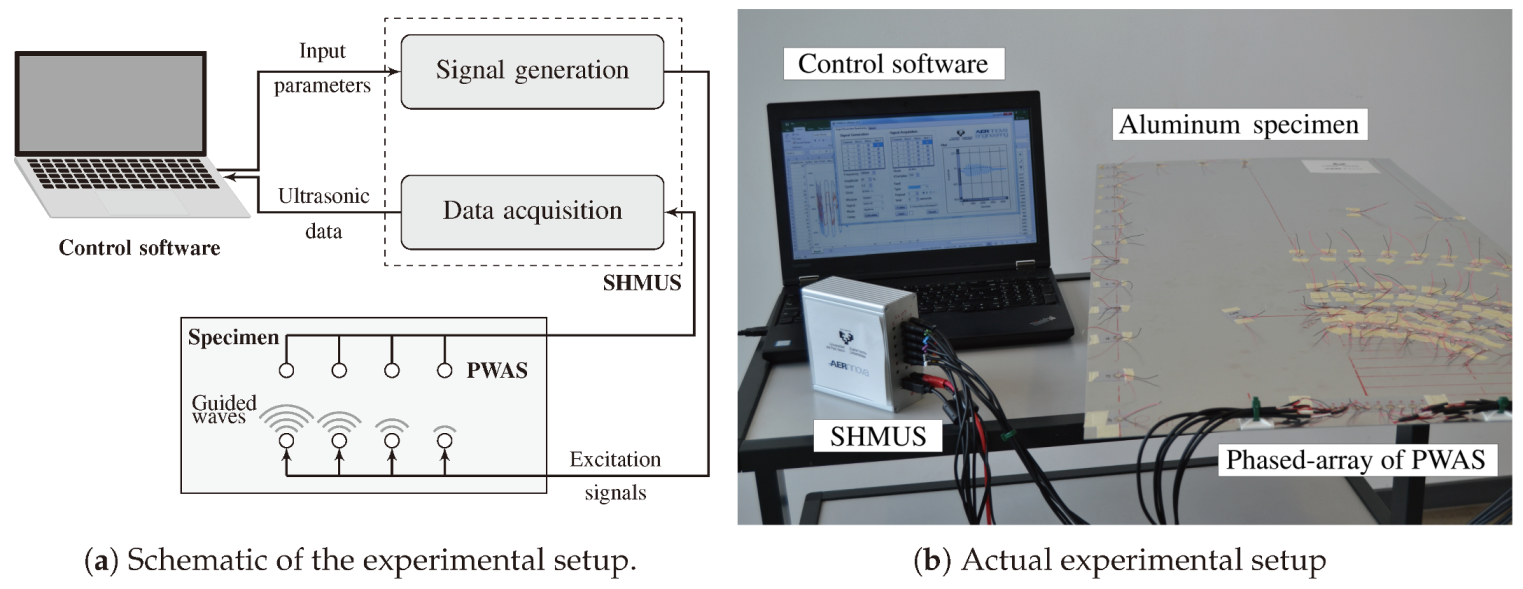
3. Experimental Setup
3.1. Hardware of the SHMUS
3.2. Setup of the Isotropic Plate-Like Structure
3.3. Generation of Ultrasonic Signals
4. Experimental Results and Analysis
4.1. Effect of the Number of Actuators
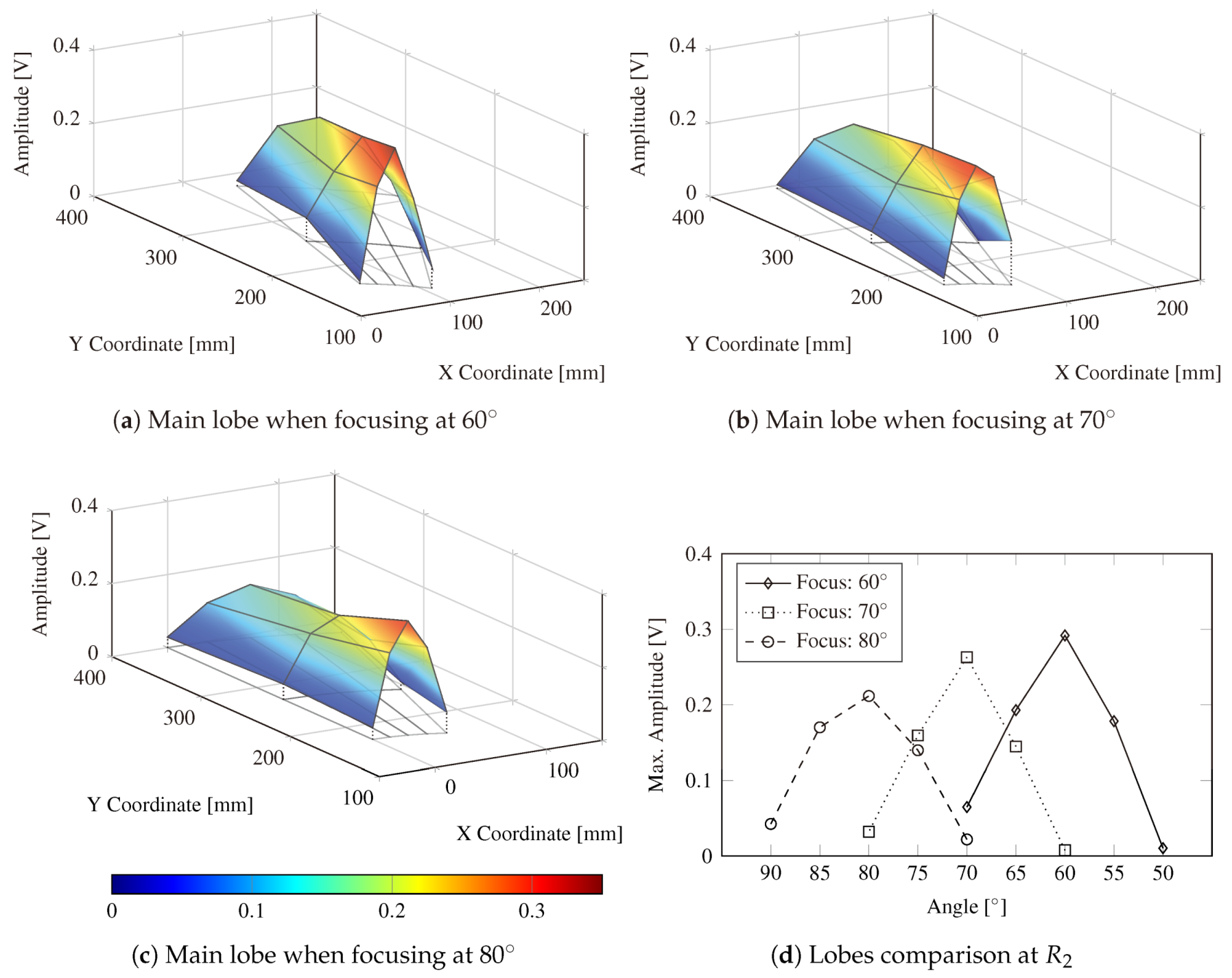
4.2. Angular Precision and Attenuation Effects
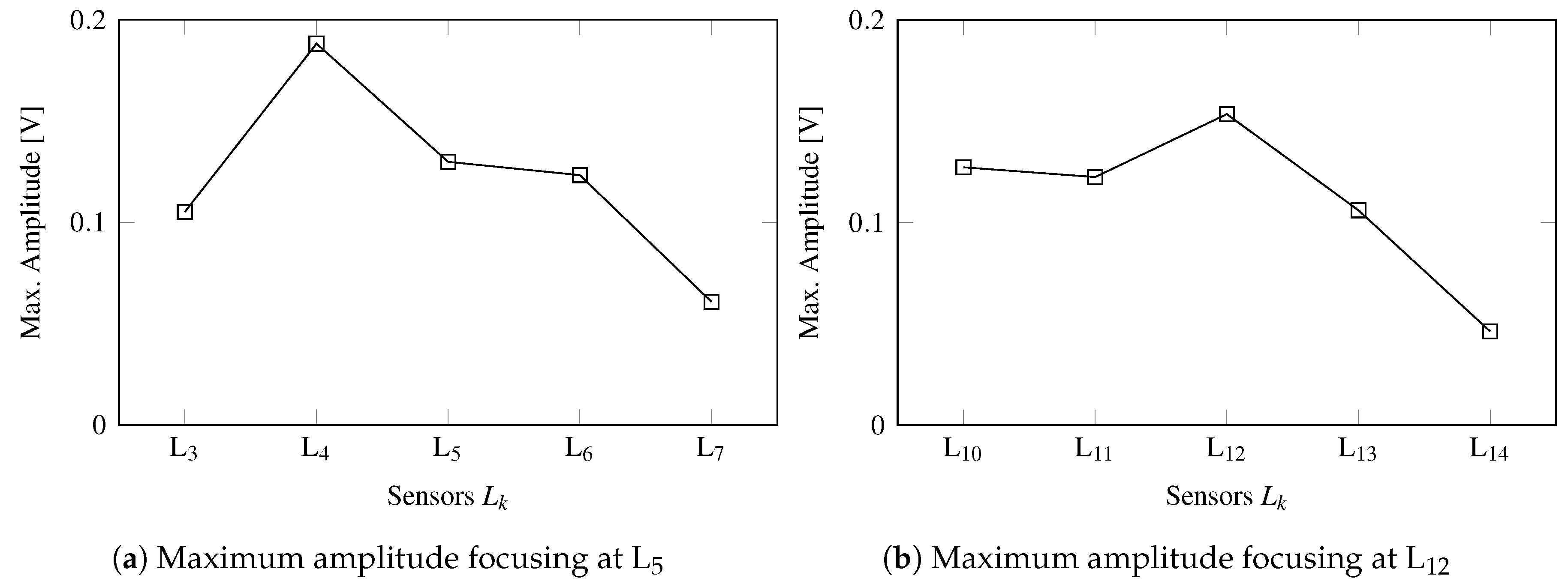
4.3. Effect of the Edges
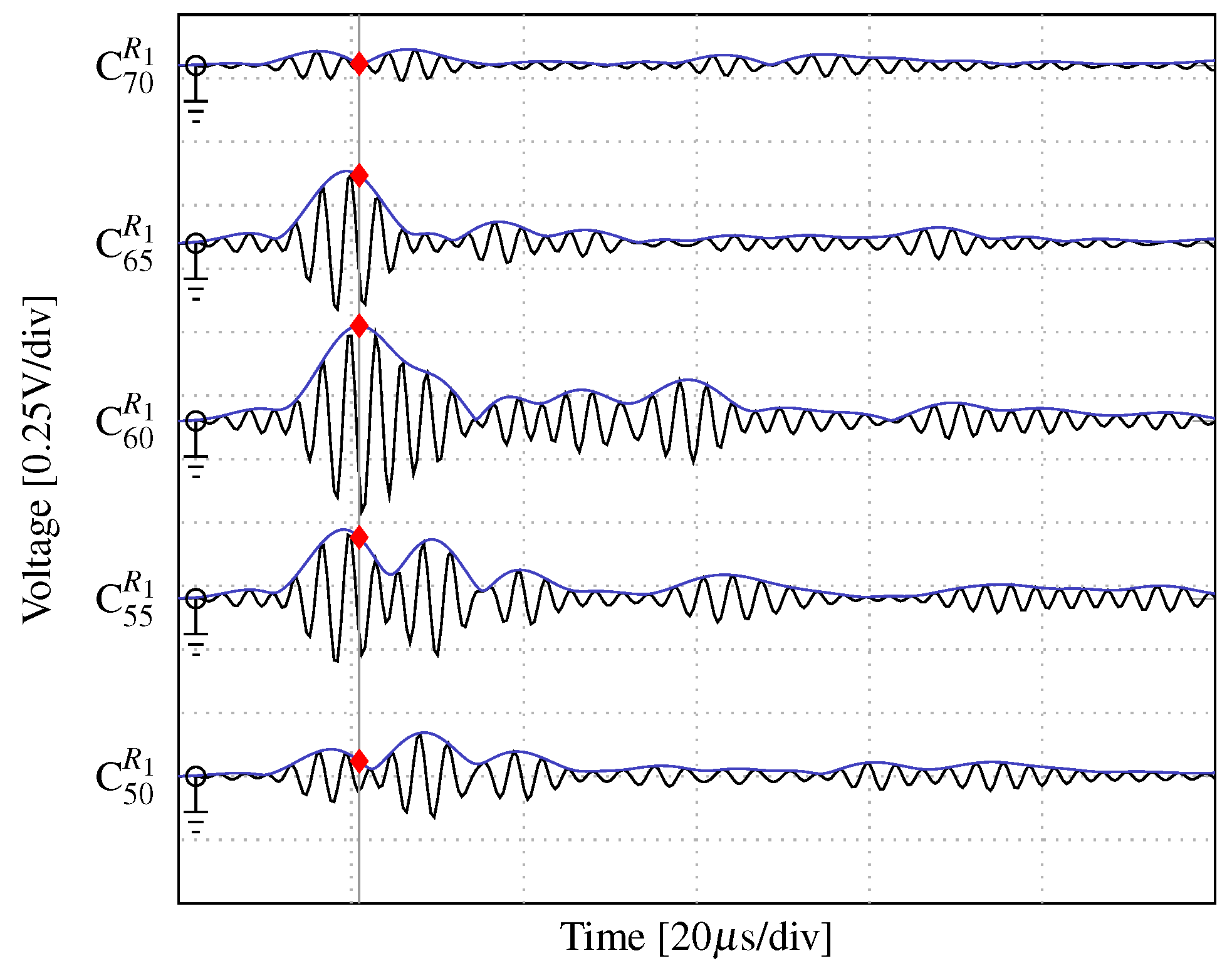
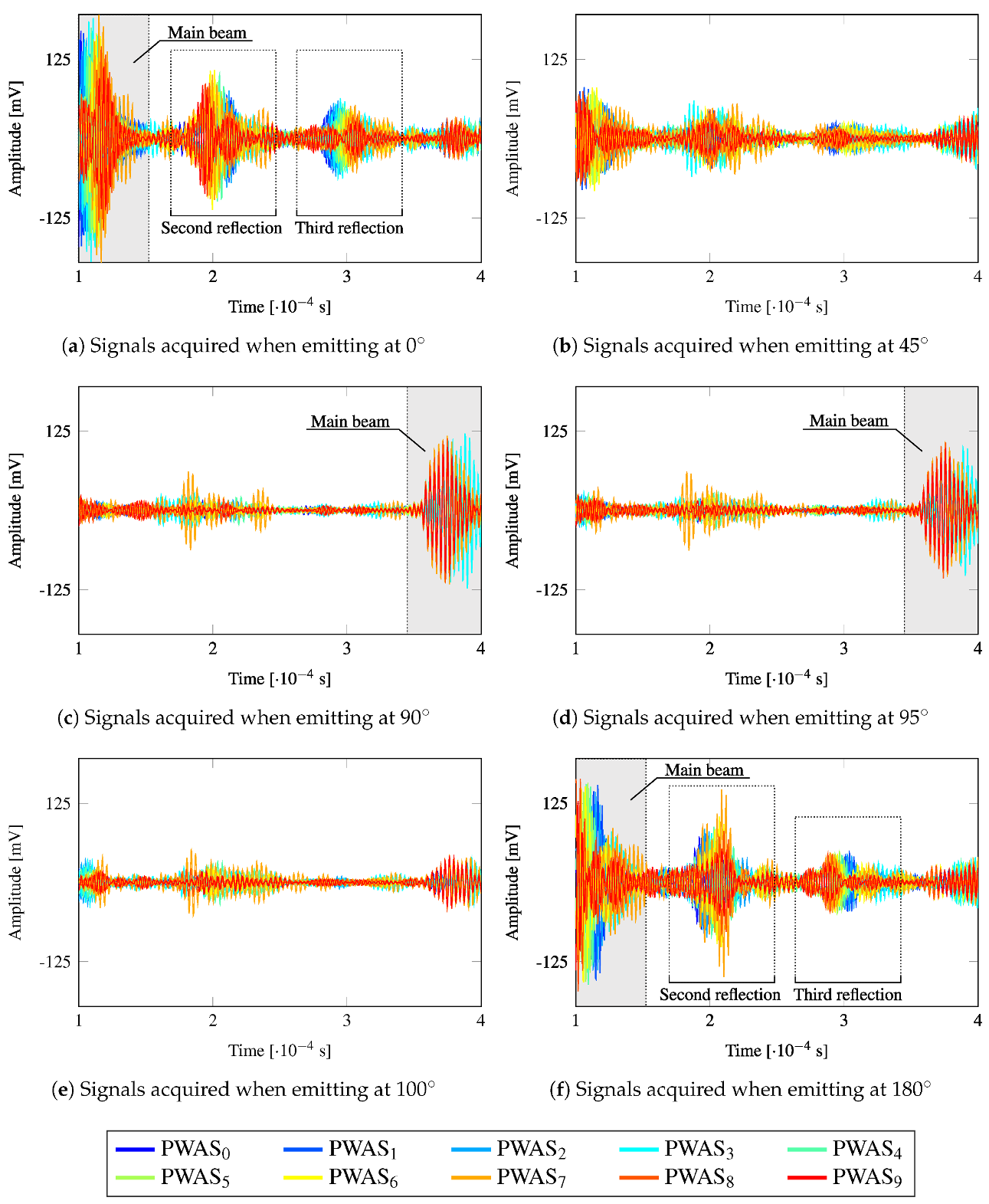
4.4. Acquired Signals
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Beamforming Simulation Setup
Appendix A.1. Geometry and Material Properties

Appendix A.2. Boundary Conditions
Appendix A.3. Meshing Parameters
Appendix A.4. Explicit Step Properties
References
- Cartz, L. Nondestructive Testing; ASM International: Materials Park, OH, USA, 1995. [Google Scholar]
- Crowe, G. An Introduction to Nondestructive Testing; American Society for Nondestructive Testing: Columbus, OH, USA, 2009. [Google Scholar]
- Jardine, A.K.; Lin, D.; Banjevic, D. A review on machinery diagnostics and prognostics implementing condition-based maintenance. Mech. Syst. Signal Process. 2006, 20, 1483–1510. [Google Scholar] [CrossRef]
- Su, Z.; Ye, L.; Lu, Y. Guided Lamb waves for identification of damage in composite structures: A review. J. Sound Vib. 2006, 295, 753–780. [Google Scholar] [CrossRef]
- Bhowmik, B.; Tripura, T.; Hazra, B.; Pakrashi, V. First-order eigen-perturbation techniques for real-time damage detection of vibrating systems: Theory and applications. Appl. Mech. Rev. 2019, 71, 060801. [Google Scholar] [CrossRef]
- Brownjohn, J.M.; De Stefano, A.; Xu, Y.L.; Wenzel, H.; Aktan, A.E. Vibration-based monitoring of civil infrastructure: Challenges and successes. J. Civ. Struct. Health Monit. 2011, 1, 79–95. [Google Scholar] [CrossRef]
- Wandowski, T.; Malinowski, P.; Ostachowicz, W. Circular sensing networks for guided waves based structural health monitoring. Mech. Syst. Signal Process. 2016, 66, 248–267. [Google Scholar] [CrossRef]
- Diamanti, K.; Soutis, C. Structural health monitoring techniques for aircraft composite structures. Prog. Aerosp. Sci. 2010, 46, 342–352. [Google Scholar] [CrossRef]
- Giurgiutiu, V.; Bao, J. Embedded-ultrasonics structural radar for in situ structural health monitoring of thin-wall structures. Struct. Health Monit. 2004, 3, 121–140. [Google Scholar] [CrossRef]
- Cantero-Chinchilla, S.; Chiachío, J.; Chiachío, M.; Chronopoulos, D.; Jones, A. A robust Bayesian methodology for damage localization in plate-like structures using ultrasonic guided-waves. Mech. Syst. Signal Process. 2019, 122, 192–205. [Google Scholar] [CrossRef]
- Giurgiutiu, V. Chapter 6—Piezoelectric Wafer Active Sensors. In Structural Health Monitoring of Aerospace Composites; Giurgiutiu, V., Ed.; Academic Press: Oxford, UK, 2016; pp. 177–248. [Google Scholar]
- Olson, S.E.; DeSimio, M.P.; Derriso, M.M. Beam forming of Lamb waves for structural health monitoring. J. Vib. Acoust. 2007, 129, 730–738. [Google Scholar] [CrossRef]
- Jung, H.K.; Park, G.; Jeon, J.Y. Development of an asymmetric sensor array with beamforming. In Proceedings of the EWSHM-9th European Workshop on Structural Health Monitoring, Manchester, UK, 10–13 July 2018. [Google Scholar]
- David, G.; Robert, J.; Zhang, B.; Laine, A.F. Time domain compressive beam forming of ultrasound signals. J. Acoust. Soc. Am. 2015, 137, 2773–2784. [Google Scholar] [CrossRef]
- Thomenius, K.E. Evolution of ultrasound beamformers. In Proceedings of the 1996 IEEE Ultrasonics Symposium, San Antonio, TX, USA, 3–6 November 1996; Volume 2, pp. 1615–1622. [Google Scholar]
- Santoni, G.B.; Yu, L.; Xu, B.; Giurgiutiu, V. Lamb wave-mode tuning of piezoelectric wafer active sensors for structural health monitoring. J. Vib. Acoust. 2007, 129, 752–762. [Google Scholar] [CrossRef]
- Yu, L.; Giurgiutiu, V. In situ 2-D piezoelectric wafer active sensors arrays for guided wave damage detection. Ultrasonics 2008, 48, 117–134. [Google Scholar] [CrossRef] [PubMed]
- Li, F.; Peng, H.; Meng, G. Quantitative damage image construction in plate structures using a circular PZT array and lamb waves. Sens. Actuators A Phys. 2014, 214, 66–73. [Google Scholar] [CrossRef]
- Mhamdi, L.; Schumacher, T. A Comparison Between Time-of-Arrival and Novel Phased Array Approaches to Estimate Acoustic Emission Source Locations in a Steel Plate. J. Nondestruct. Eval. 2015, 34, 38. [Google Scholar] [CrossRef]
- Yu, L.; Tian, Z. Guided wave phased array beamforming and imaging in composite plates. Ultrasonics 2016, 68, 43–53. [Google Scholar] [CrossRef]
- Tian, Z.; Yu, L.; Leckey, C. Rapid guided wave delamination detection and quantification in composites using global-local sensing. Smart Mater. Struct. 2016, 25, 085042. [Google Scholar] [CrossRef]
- Tian, Z.; Howden, S.; Ma, Z.; Xiao, W.; Yu, L. Pulsed laser-scanning laser Doppler vibrometer (PL-SLDV) phased arrays for damage detection in aluminum plates. Mech. Syst. Signal Process. 2019, 121, 158–170. [Google Scholar] [CrossRef]
- Sundararaman, S.; Adams, D.E.; Rigas, E.J. Structural damage identification in homogeneous and heterogeneous structures using beamforming. Struct. Health Monit. 2005, 4, 171–190. [Google Scholar] [CrossRef]
- Hall, J.S.; Michaels, J.E. Minimum variance ultrasonic imaging applied to an in situ sparse guided wave array. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2010, 57, 2311–2323. [Google Scholar] [CrossRef]
- Hall, J.S.; Michaels, J.E. Adaptive dispersion compensation for guided wave imaging. In AIP Conference Proceedings; American Institute of Physics: New York, NY, USA, 2012; Volume 1430, pp. 623–630. [Google Scholar]
- Hall, J.S.; Michaels, J.E. Multipath ultrasonic guided wave imaging in complex structures. Struct. Health Monit. 2015, 14, 345–358. [Google Scholar] [CrossRef]
- Lee, S.J.; Gandhi, N.; Hall, J.S.; Michaels, J.E.; Xu, B.; Michaels, T.E.; Ruzzene, M. Baseline-free guided wave imaging via adaptive source removal. Struct. Health Monit. 2012, 11, 472–481. [Google Scholar] [CrossRef]
- Adams, C.; Harput, S.; Cowell, D.; Carpenter, T.M.; Charutz, D.M.; Freear, S. An adaptive array excitation scheme for the unidirectional enhancement of guided waves. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2017, 64, 441–451. [Google Scholar] [CrossRef] [PubMed]
- Senyurek, V.Y.; Baghalian, A.; Tashakori, S.; McDaniel, D.; Tansel, I.N. Localization of multiple defects using the compact phased array (CPA) method. J. Sound Vib. 2018, 413, 383–394. [Google Scholar] [CrossRef]
- Moulin, E.; Bourasseau, N.; Assaad, J.; Delebarre, C. Lamb-wave beam-steering for integrated health monitoring applications. In Nondestructive Evaluation and Health Monitoring of Aerospace Materials and Composites II; International Society for Optics and Photonics: San Diego, CA, USA, 2003; Volume 5046, pp. 124–132. [Google Scholar]
- Deutsch, W.; Cheng, A.; Achenbach, J.D. Self-focusing of Rayleigh waves and Lamb waves with a linear phased array. J. Res. Nondestruct. Eval. 1997, 9, 81–95. [Google Scholar] [CrossRef]
- Clay, A.C.; Wooh, S.C.; Azar, L.; Wang, J.Y. Experimental study of phased array beam steering characteristics. J. Nondestruct. Eval. 1999, 18, 59–71. [Google Scholar] [CrossRef]
- Tian, Z.; Yu, L. Elastic Phased Diffraction Gratings for Manipulation of Ultrasonic Guided Waves in Solids. Phys. Rev. Appl. 2019, 11, 024052. [Google Scholar] [CrossRef]
- Johnson, D.H.; Dudgeon, D.E. Array Signal Processing: Concepts and Techniques; PTR Prentice Hall: Englewood Cliffs, NJ, USA, 1993. [Google Scholar]
- Yu, L.; Giurgiutiu, V. Improvement of Damage Detection with the Embedded Ultrasonics Structural Radar for Structural Health Monitoring. In Proceedings of 5th International Workshop on Structural Health Monitoring; Stanford University: Stanford, CA, USA, 2005. [Google Scholar]
- Aranguren, G.; Etxaniz, J.; Barrera, E.; Ruiz, M.; Olivares, M.A.; Taboada, I.; Urrutia, A.; Melendez, R. Structural Health Monitoring Ultrasound System. In Proceedings of the EWSHM-8th European Workshop on Structural Health Monitoring, Bilbao, Spain, 5–8 July 2016. [Google Scholar]
- Van Veen, B.D.; Buckley, K.M. Beamforming: A versatile approach to spatial filtering. IEEE ASSP Mag. 1988, 5, 4–24. [Google Scholar] [CrossRef]
- Smith, S.W. The Scientist and Engineer’s Guide to Digital Signal Processing; California Technical Pub.: San Diego, CA, USA, 1997. [Google Scholar]
- Cohen, L. Time-Frequency Analysis: Theory and Applications; Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 1995. [Google Scholar]
- Cantero-Chinchilla, S.; Chiachío, J.; Chiachío, M.; Chronopoulos, D.; Jones, A. Optimal sensor configuration for ultrasonic guided-wave inspection based on value of information. Mech. Syst. Signal Process. 2020, 135, 106377. [Google Scholar] [CrossRef]
- ABAQUS. Abaqus Documentation; Dassault Systèmes: Providence, RI, USA, 2016. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Direction | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Parameters | [μs] | [μs] | [μs] | [μs] | [μs] | [μs] | ||||||
| PWAS | 0 | 0 | 0 | 0 | 0 | 0 | 86 | 170 | 984 | |||
| PWAS | 110 | 78 | 0 | 0 | 76 | 151 | 874 | |||||
| PWAS | 219 | 115 | 0 | 0 | 67 | 132 | 765 | |||||
| PWAS | 328 | 232 | 0 | 0 | 57 | 113 | 656 | |||||
| PWAS | 437 | 309 | 0 | 0 | 48 | 94 | 547 | |||||
| PWAS | 547 | 387 | 0 | 0 | 38 | 76 | 437 | |||||
| PWAS | 656 | 464 | 0 | 0 | 29 | 57 | 328 | |||||
| PWAS | 765 | 541 | 0 | 0 | 19 | 38 | 219 | |||||
| PWAS | 874 | 618 | 0 | 0 | 10 | 19 | 110 | |||||
| PWAS | 984 | 696 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cantero-Chinchilla, S.; Aranguren, G.; Malik, M.K.; Etxaniz, J.; Martín de la Escalera, F. An Empirical Study on Transmission Beamforming for Ultrasonic Guided-Wave Based Structural Health Monitoring. Sensors 2020, 20, 1445. https://doi.org/10.3390/s20051445
Cantero-Chinchilla S, Aranguren G, Malik MK, Etxaniz J, Martín de la Escalera F. An Empirical Study on Transmission Beamforming for Ultrasonic Guided-Wave Based Structural Health Monitoring. Sensors. 2020; 20(5):1445. https://doi.org/10.3390/s20051445
Chicago/Turabian StyleCantero-Chinchilla, Sergio, Gerardo Aranguren, Muhammad Khalid Malik, Josu Etxaniz, and Federico Martín de la Escalera. 2020. "An Empirical Study on Transmission Beamforming for Ultrasonic Guided-Wave Based Structural Health Monitoring" Sensors 20, no. 5: 1445. https://doi.org/10.3390/s20051445
APA StyleCantero-Chinchilla, S., Aranguren, G., Malik, M. K., Etxaniz, J., & Martín de la Escalera, F. (2020). An Empirical Study on Transmission Beamforming for Ultrasonic Guided-Wave Based Structural Health Monitoring. Sensors, 20(5), 1445. https://doi.org/10.3390/s20051445