Performance Analysis of Direct GPS Spoofing Detection Method with AHRS/Accelerometer

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. The Structure of the First-half of the Proposed Direct GPS Spoofing Detection Method
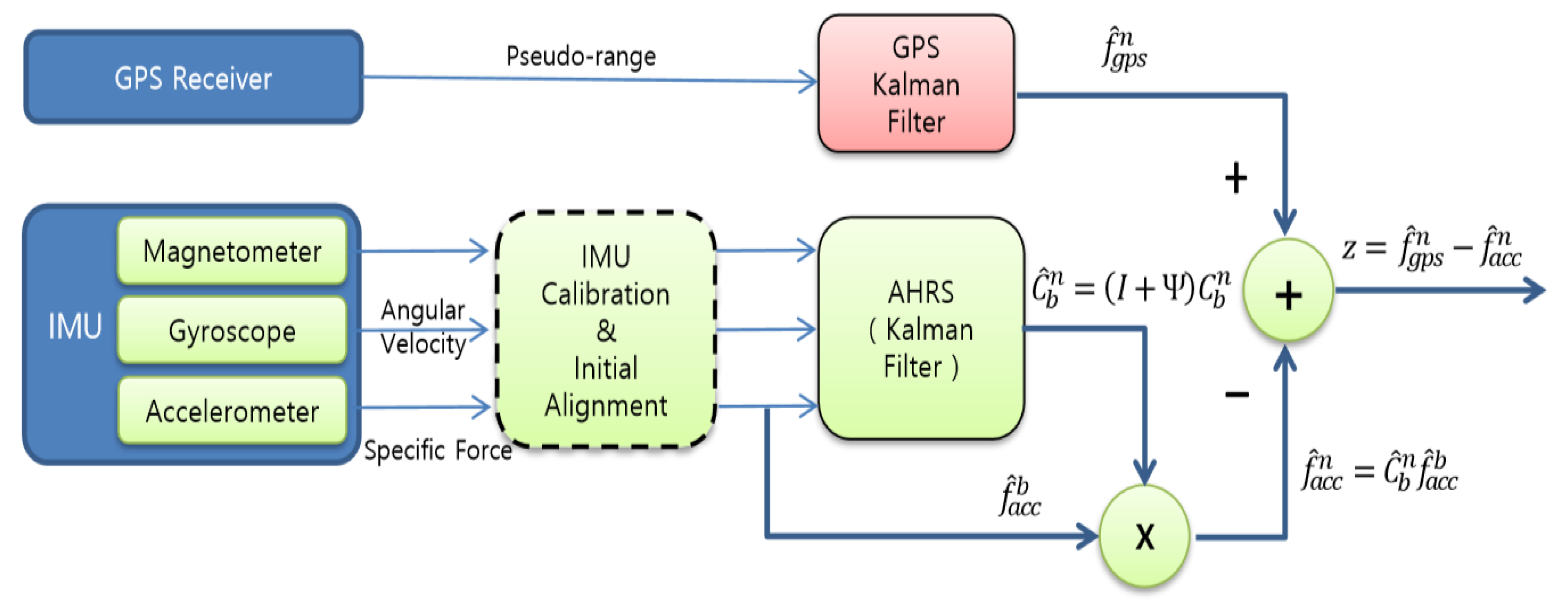
2.1. Block Diagram to Obtain the Acceleration Error from GPS Receiver and Accelerometer
2.2. GPS Kalman Filter
2.3. AHRS
3. Definition of the Decision Variables and the Structure of the Second-half of the Proposed Direct GPS Spoofing Detection
3.1. Acceleration Error Equation
3.2. Decision Variable as the Magnitude of the Horizontal Acceleration Error
3.2.1. Probability Density Function of the Magnitude of the Horizontal Acceleration Error
3.2.2. Threshold to Detect GPS Spoofing for the Decision Variable
3.3. Decision Variable (or ) as the Magnitude of the North (or East) Direction Acceleration Error
3.3.1. Probability Density Function of the Magnitude of The North (or East) Acceleration Error (or )
3.3.2. Threshold to Detect GPS Spoofing for the Decision Variable
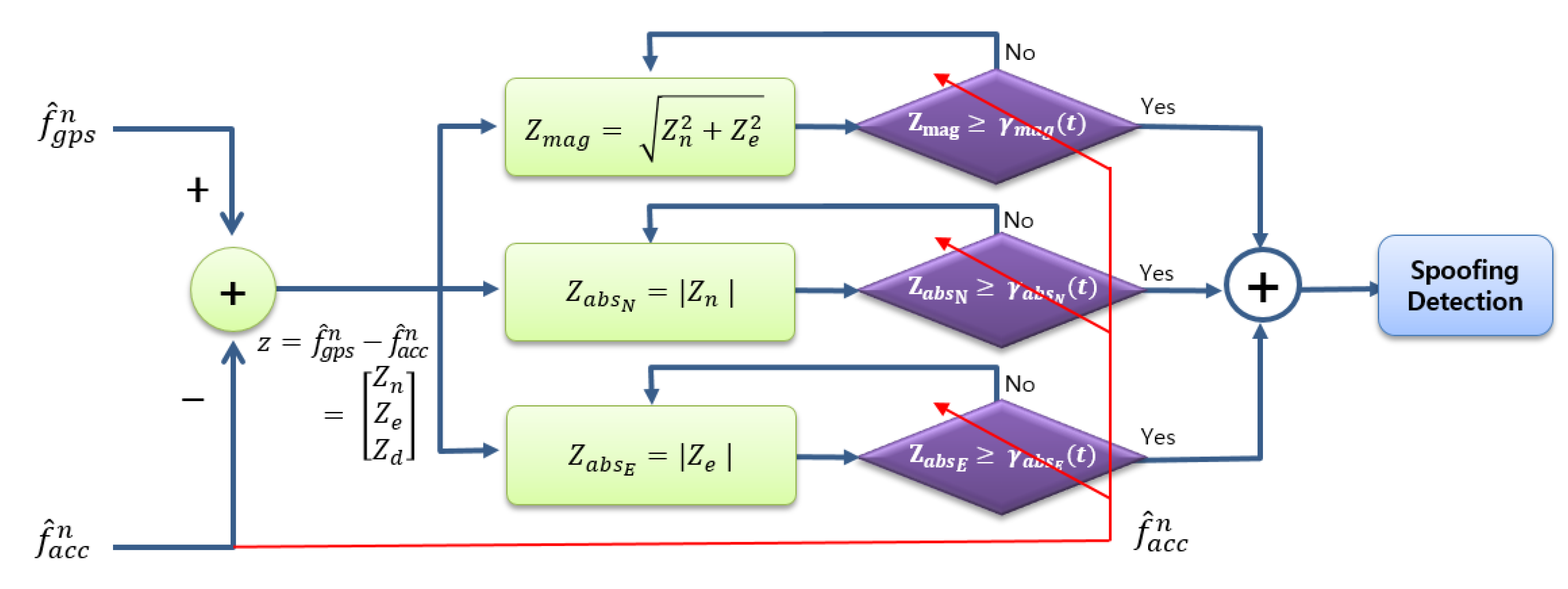
3.4. The Structure of the Second-Half of the Proposed Direct GPS Spoofing Detection
4. Performance Analysis of the Decision Variables using the Probability of Detection
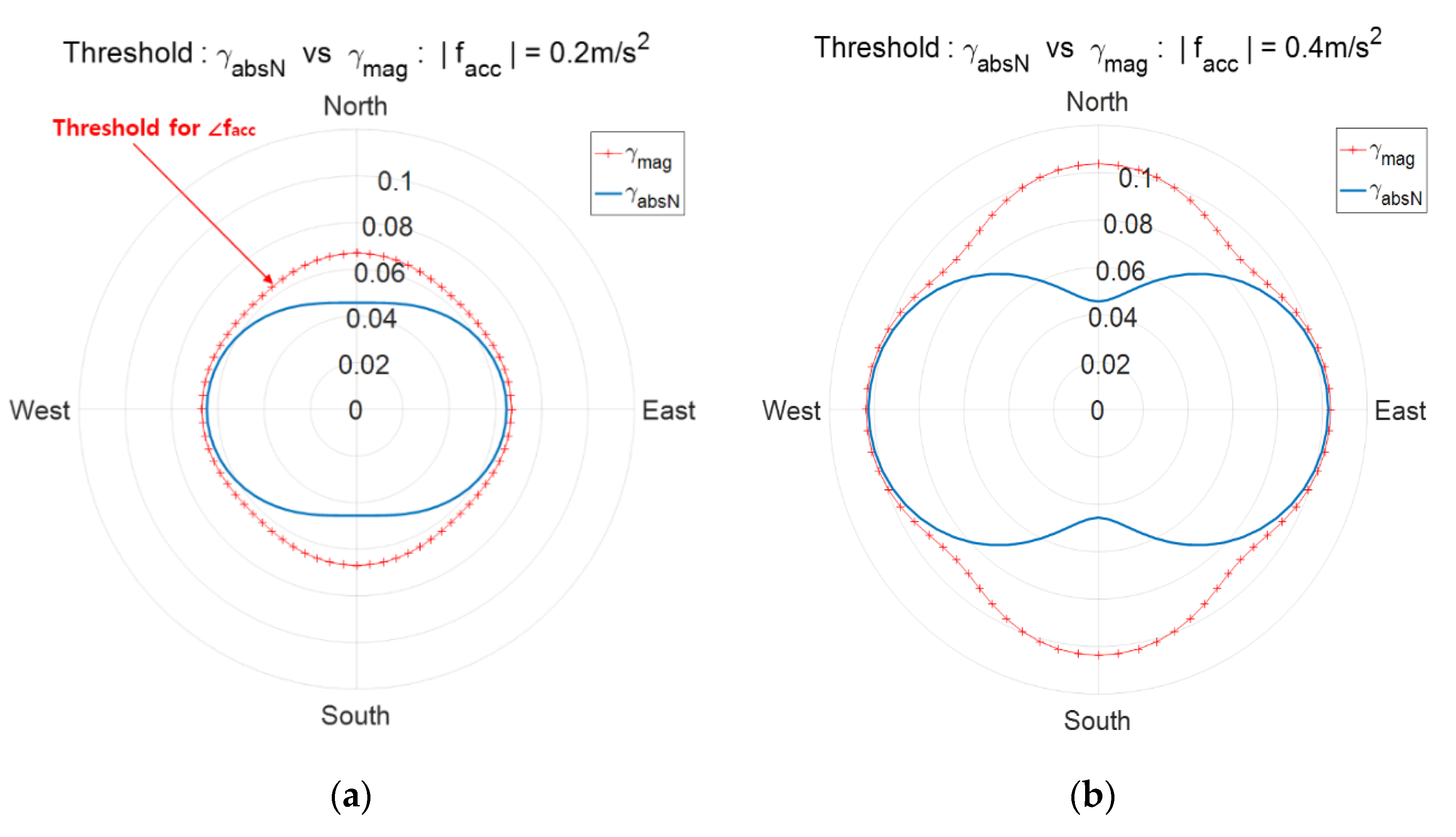
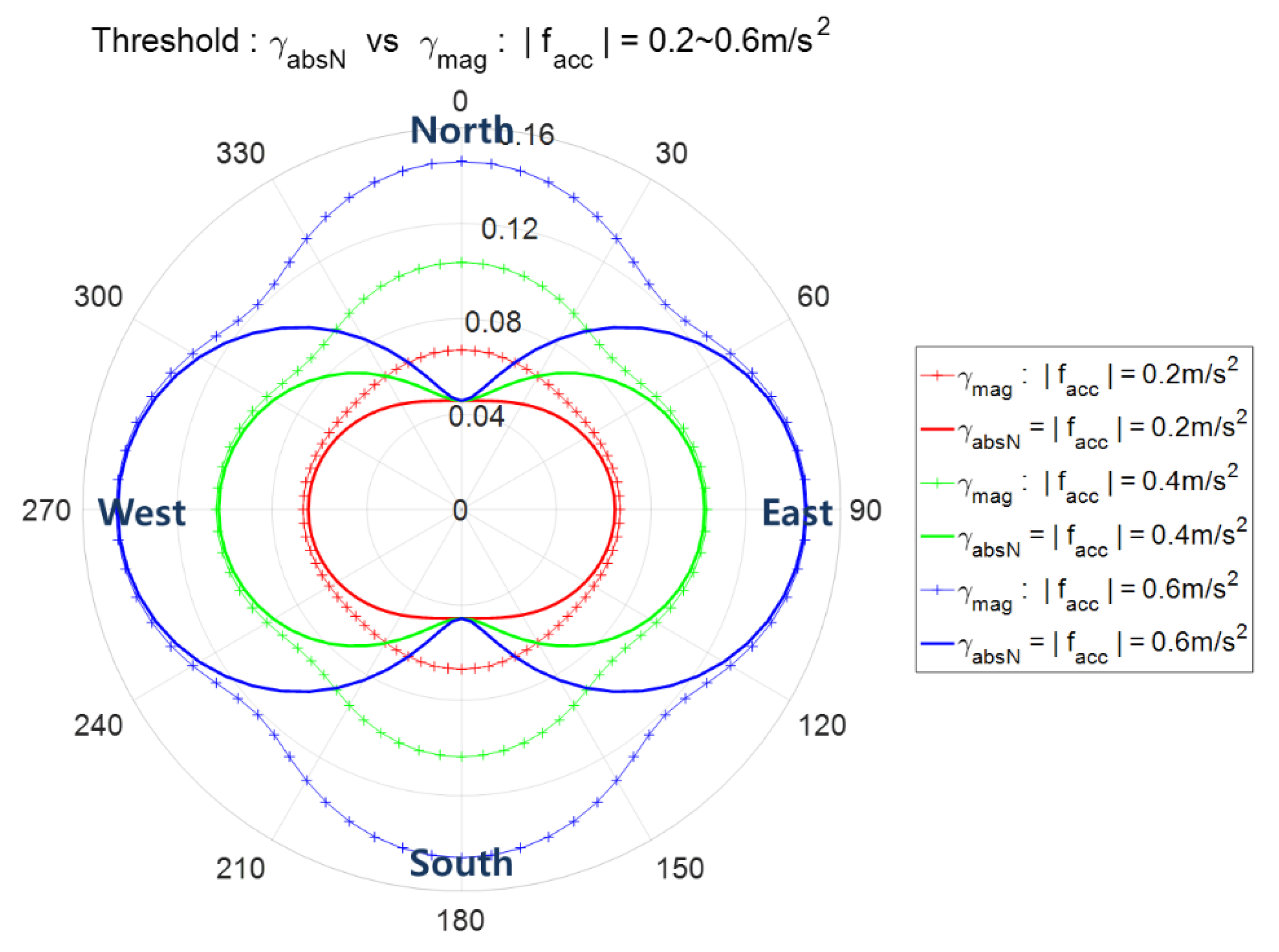
4.1. Detection Threshold According to Moving Acceleration
4.2. Effects of Moving Acceleration on the Performance of Spoofing Detection
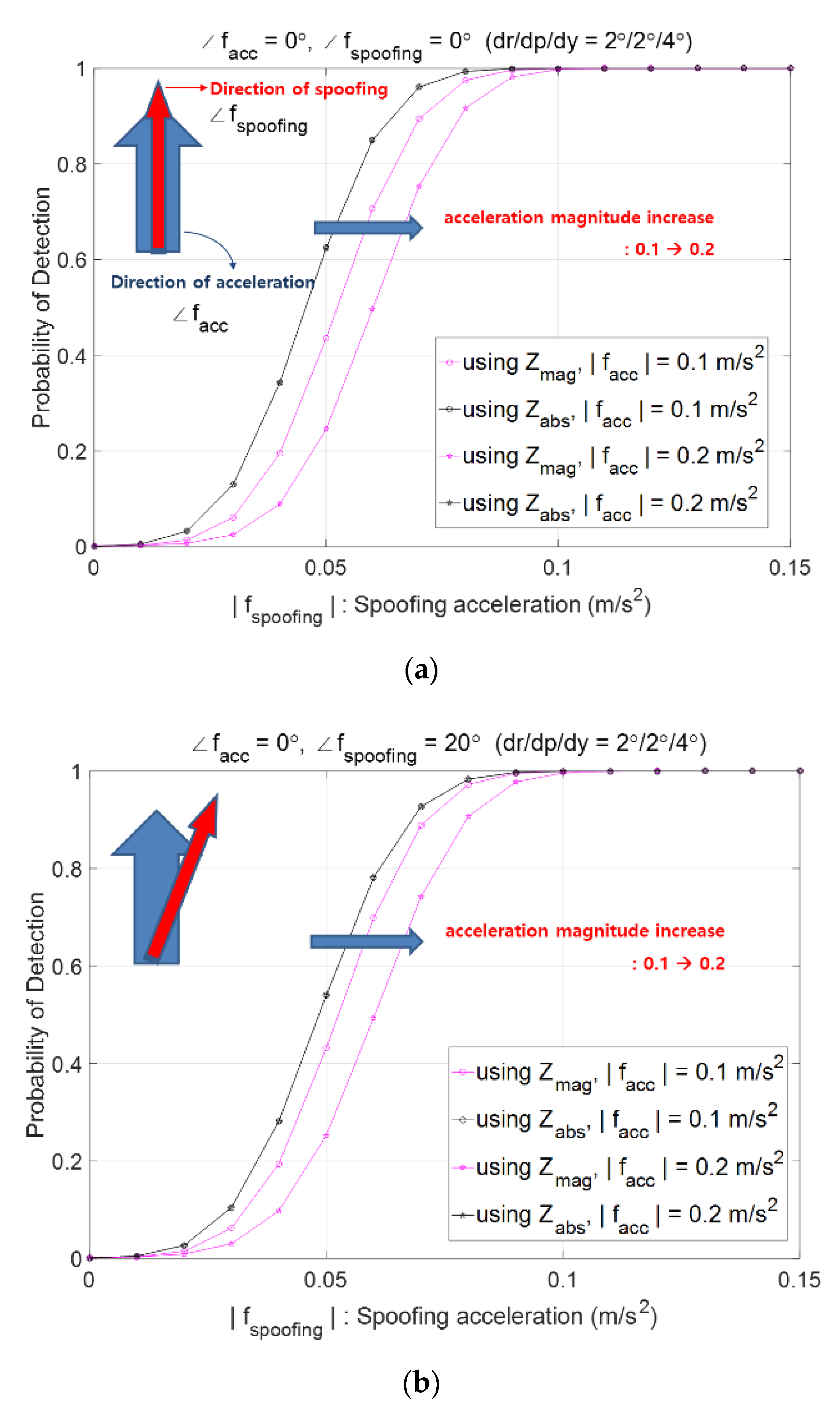
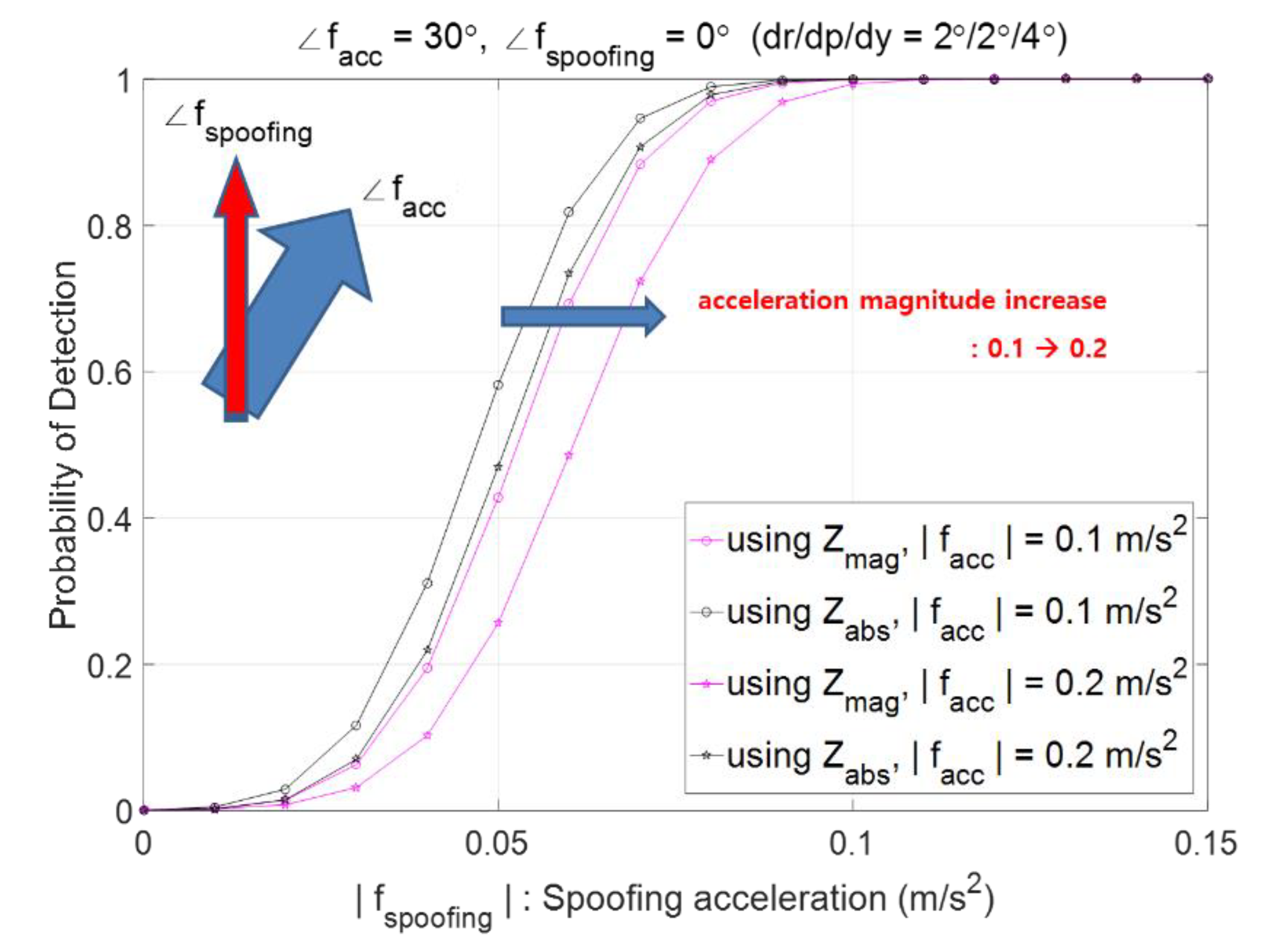
4.2.1. Performance of Spoofing Detection According to the Magnitude of Moving Acceleration
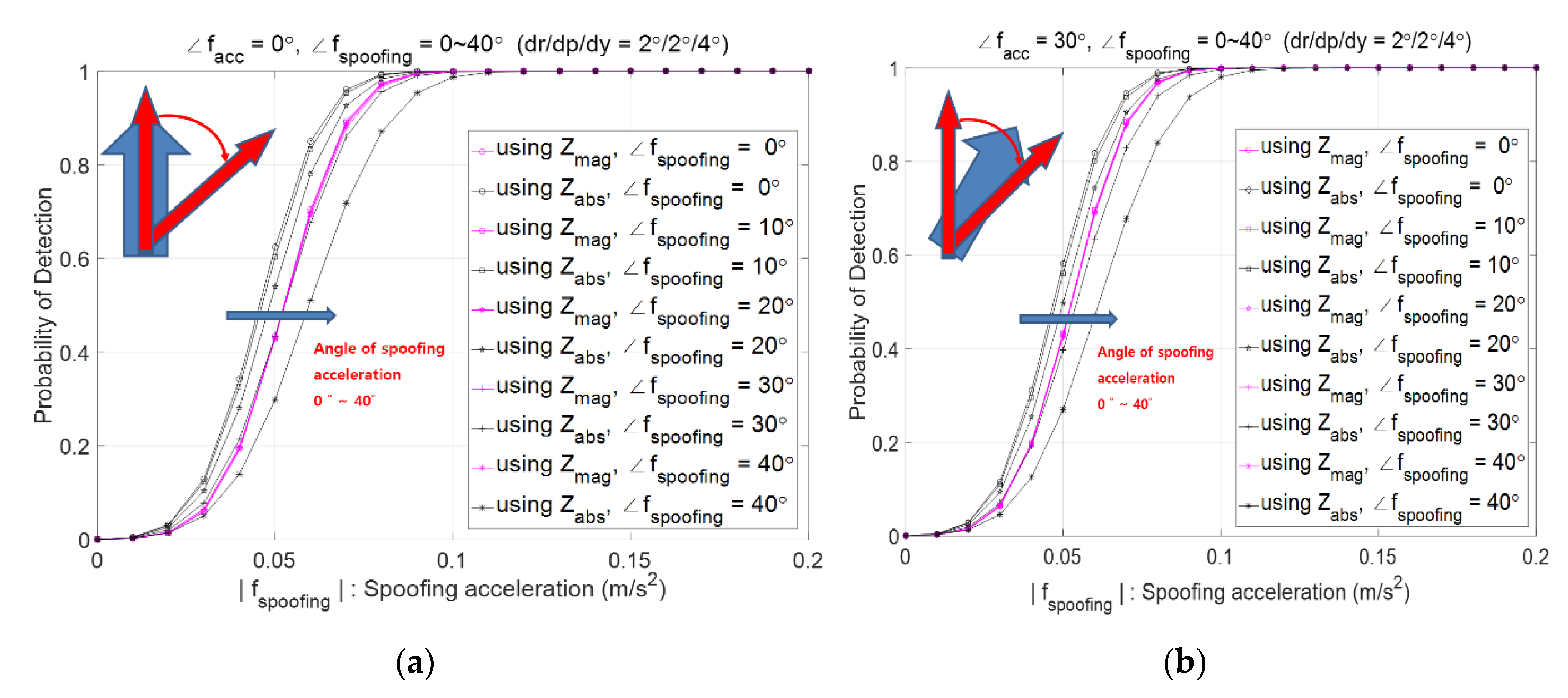
4.2.2. Performance of Spoofing Detection According to the Direction of Moving Acceleration
4.3. Effects of Spoofing Acceleration on the Performance of Spoofing Detection
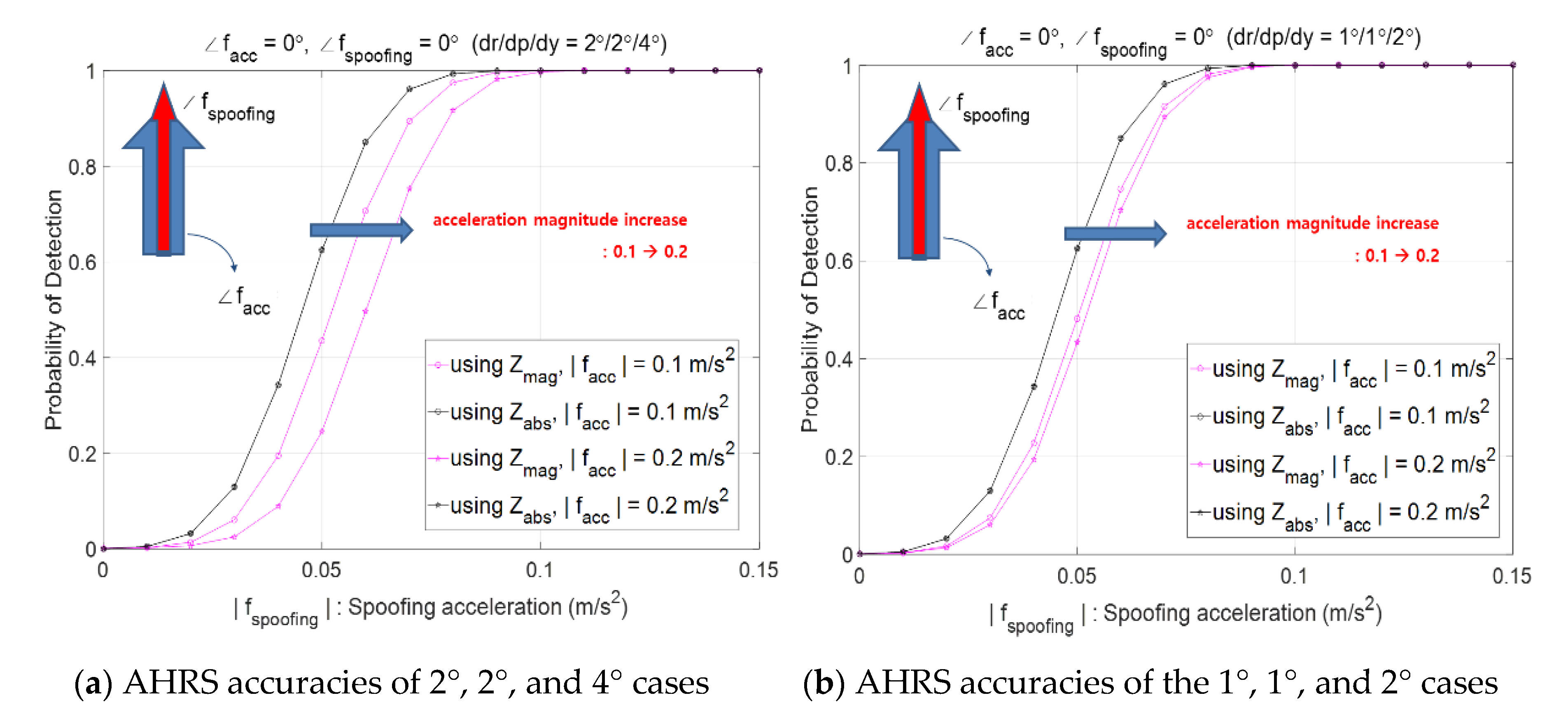
4.4. Effects of Sensor Accuracy on the Performance of Spoofing Detection
5. Performance Analysis of the Decision Variables Using the Detectable Minimum Spoofing Acceleration (DMSA)
5.1. Spoofing Detection Threshold According to Moving Acceleration
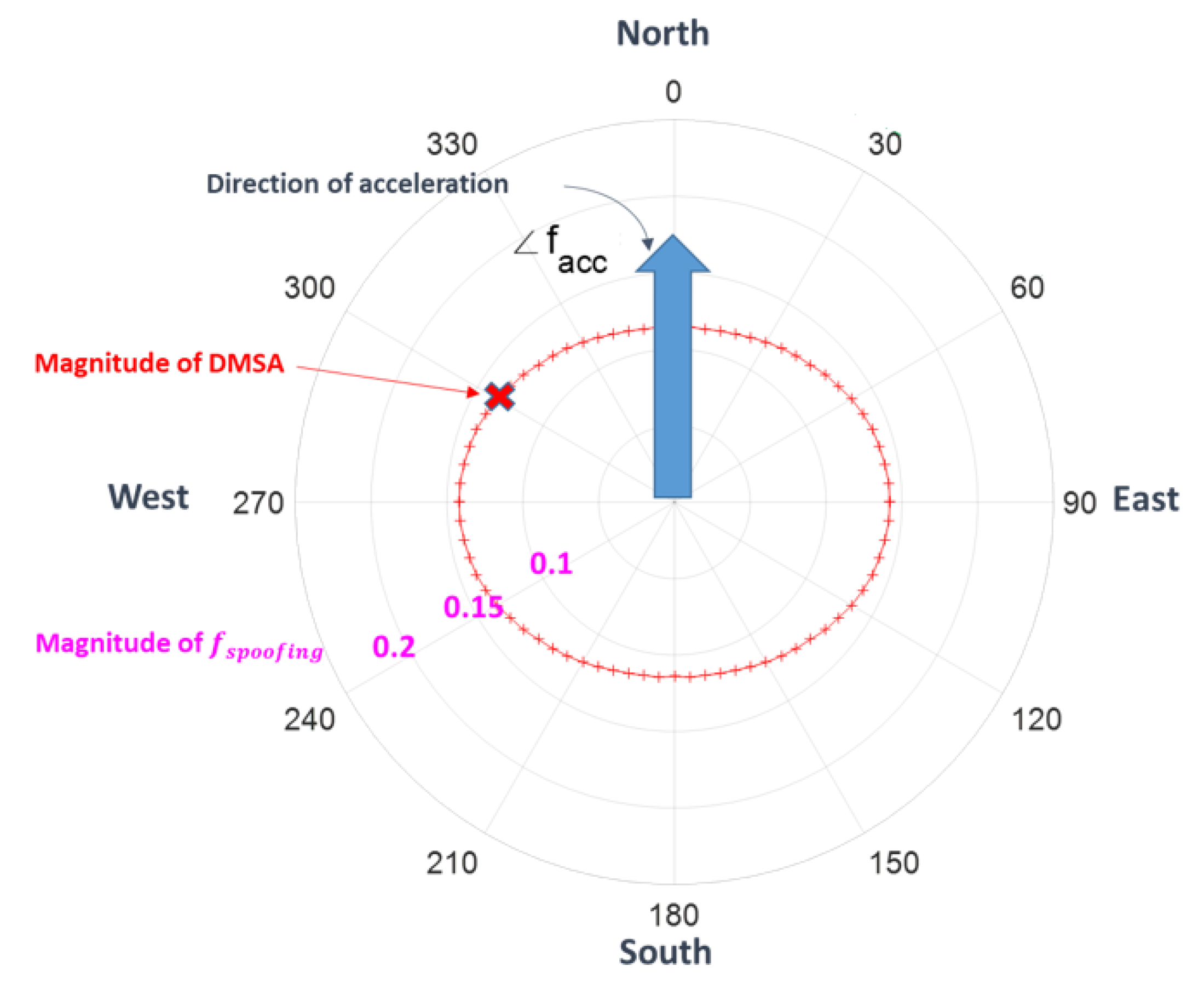
5.2. Definition of DMSA
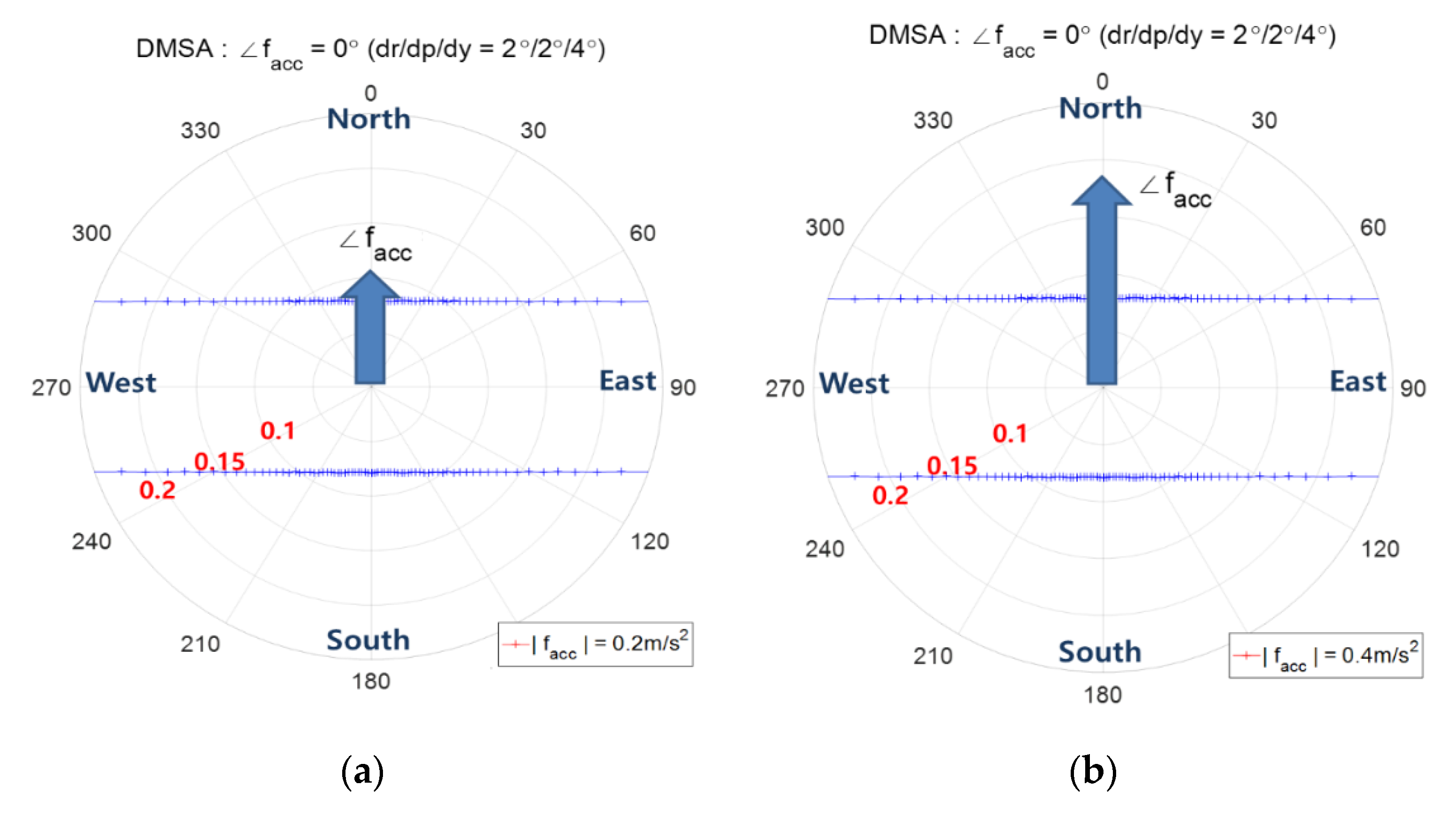
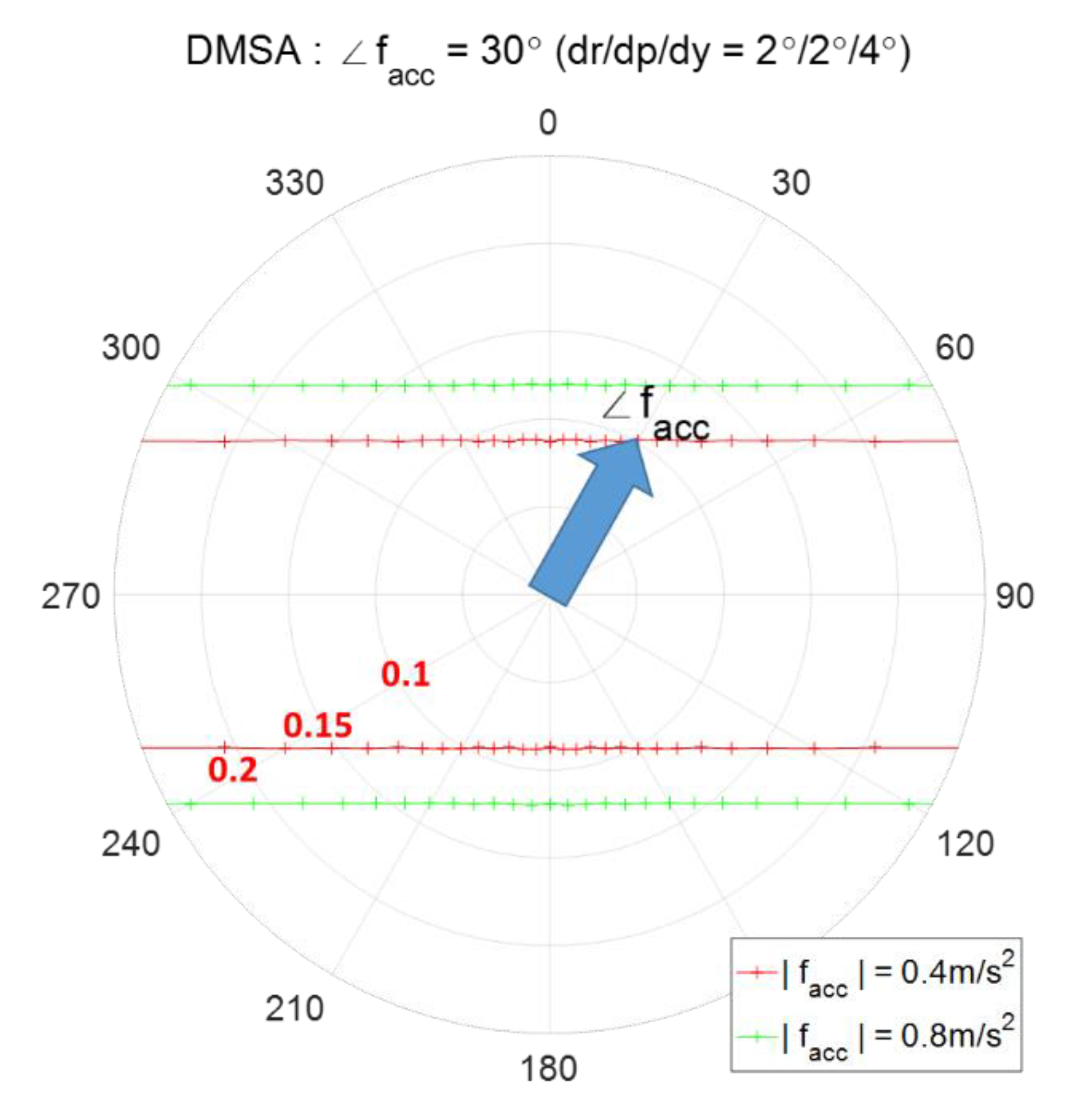
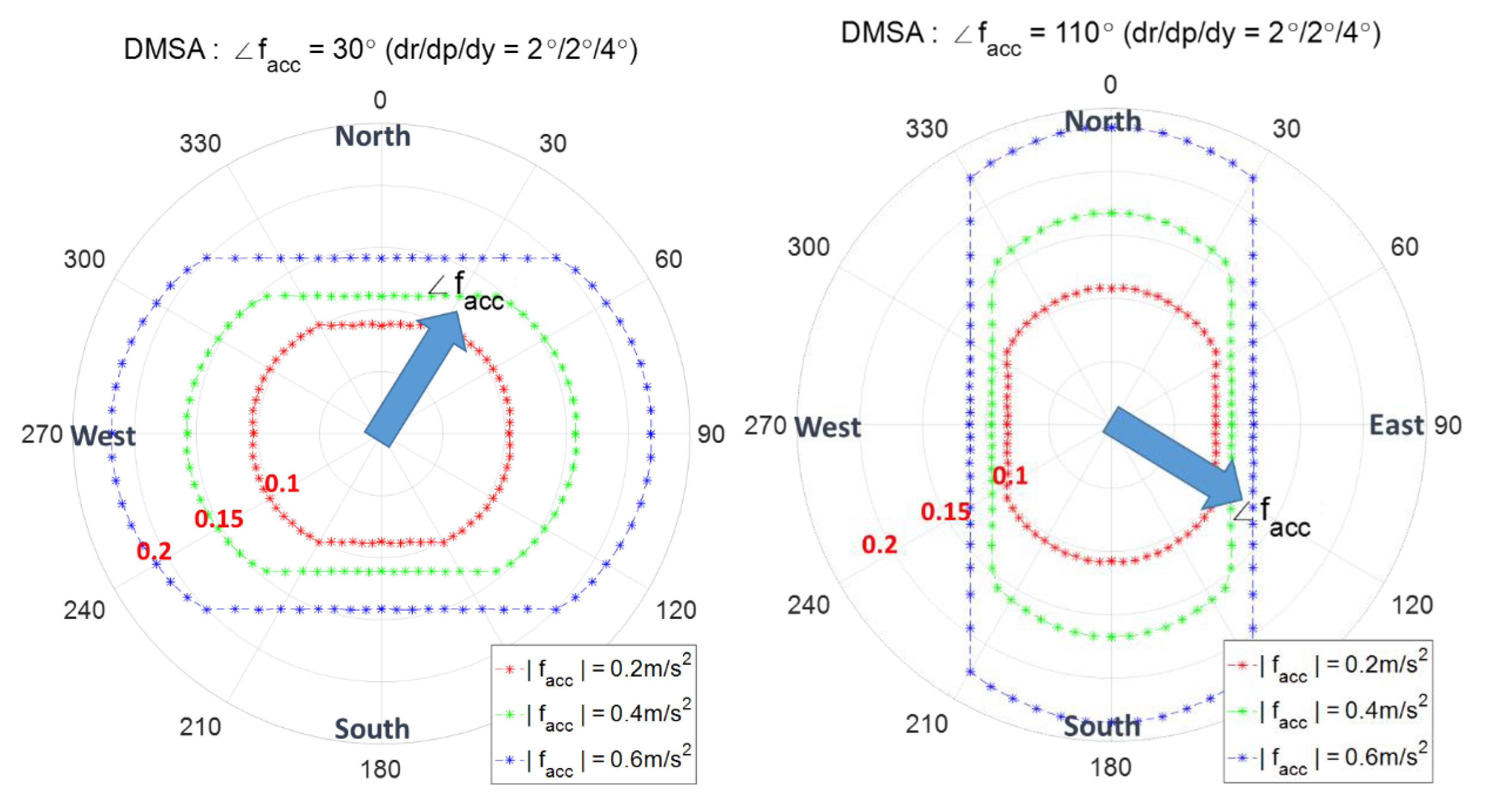
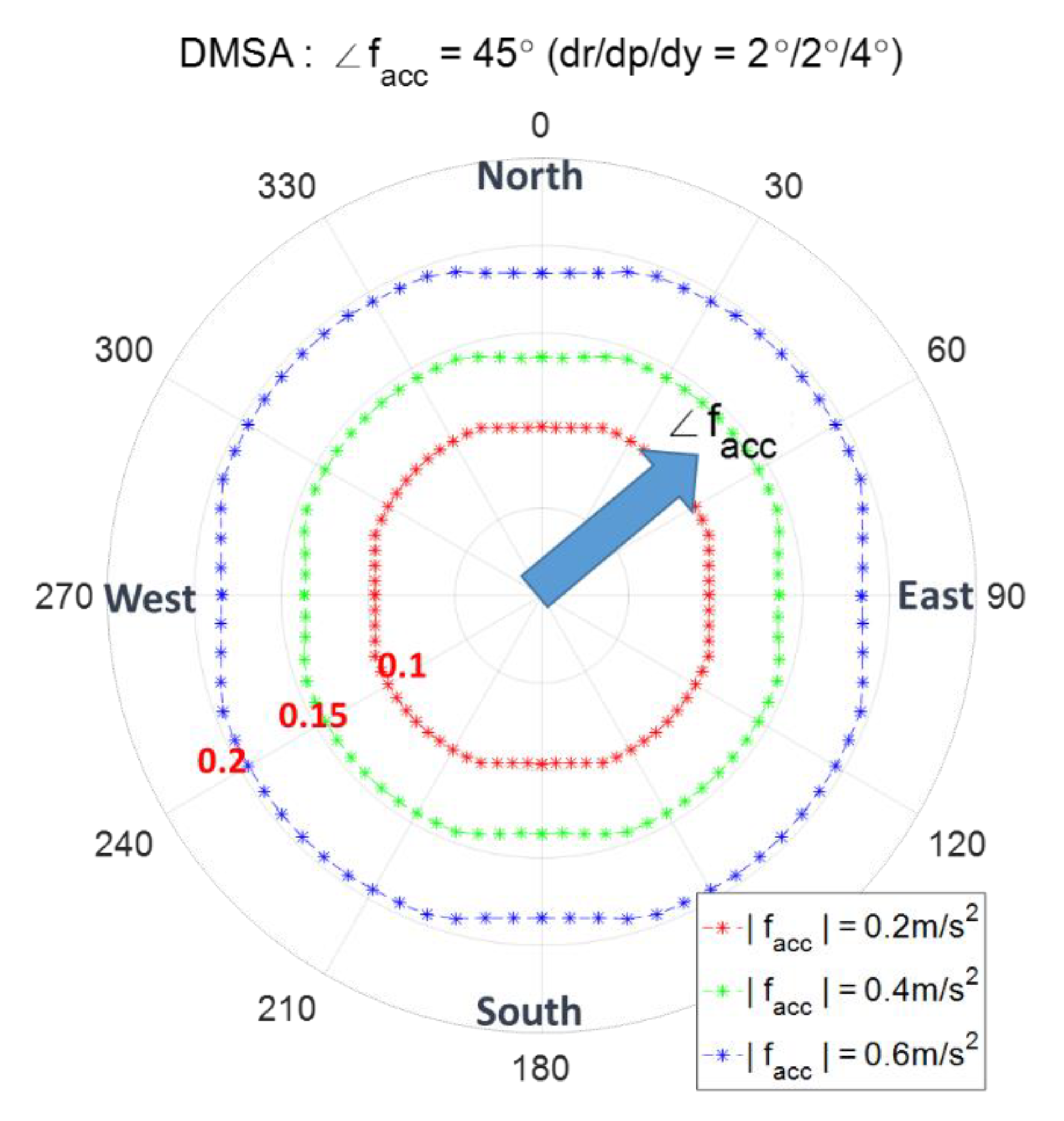
5.2.1. Contour of DMSA Using The Decision Variable Depending on The Moving Acceleration
5.2.2. Contour of DMSA Using The Decision Variable Depending on the Moving Acceleration
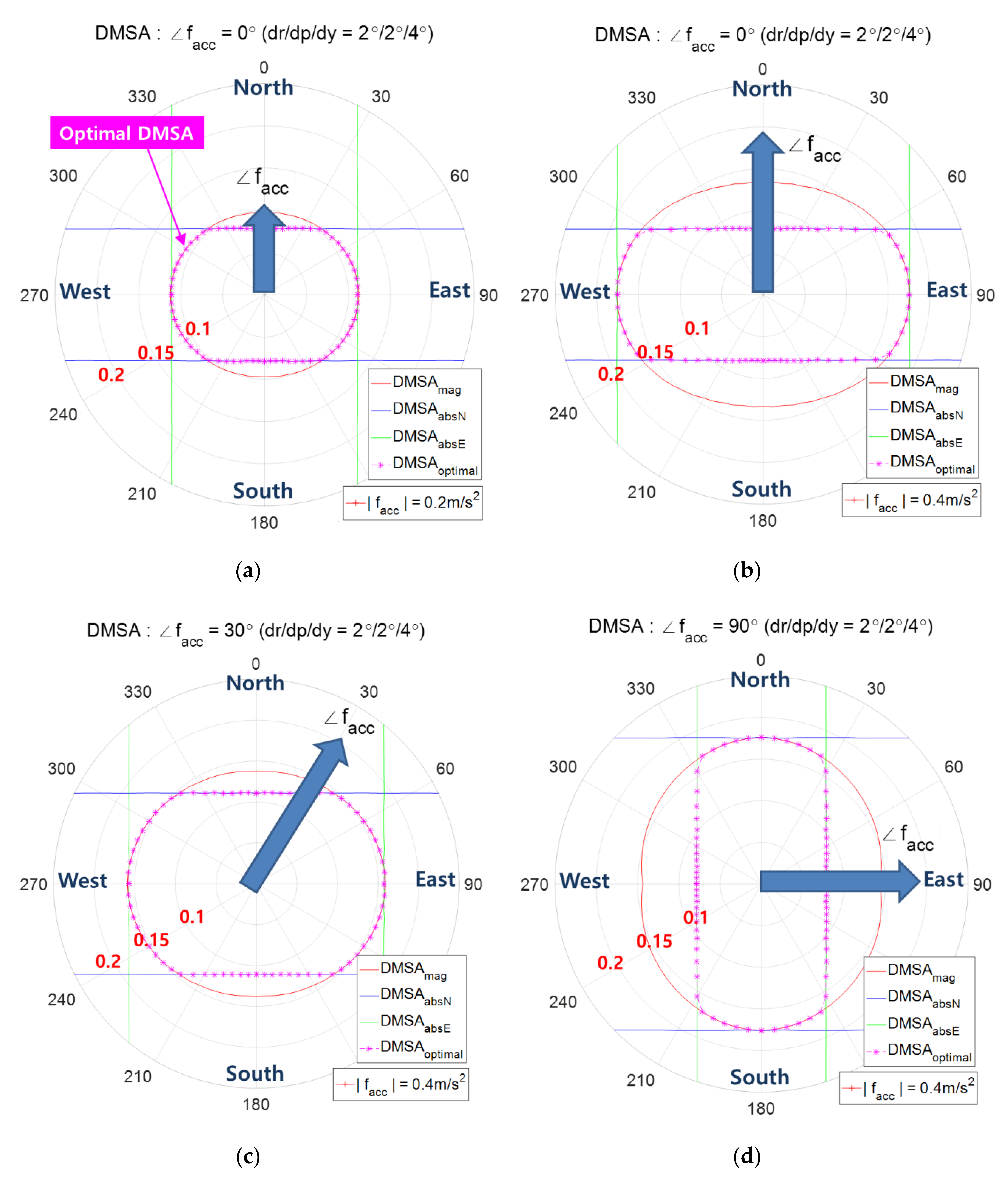
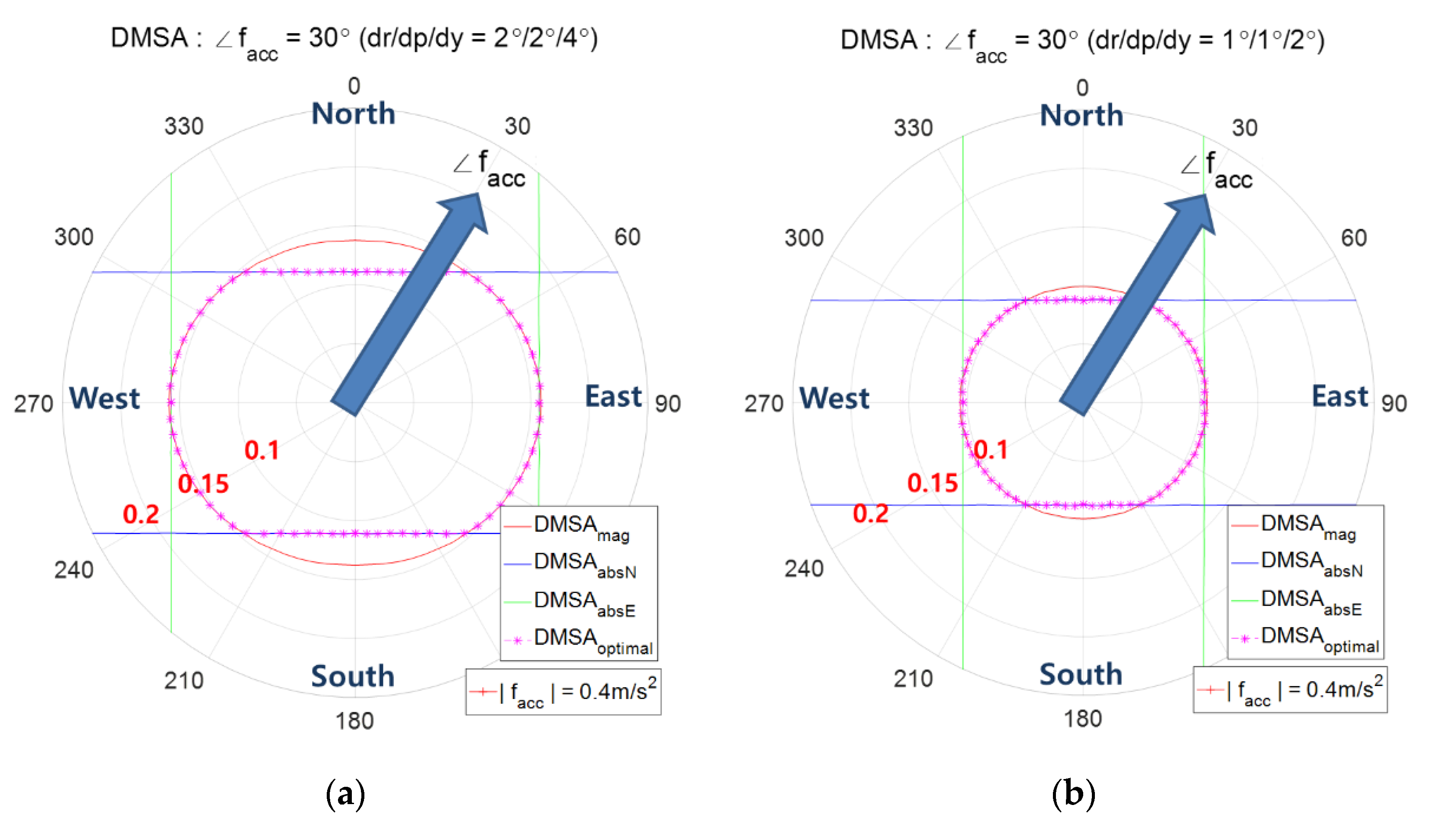
5.3. Optimal Combined Contour of DMSA Using Both and (or
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kaplan, E.D. Understanding GPS, Principles and Applications, 2nd ed.; Artech House: Norwood, MA, USA, 2006; pp. 123–132. [Google Scholar]
- Tsui, J.B.-Y. Fundamentals of Global Positioning System Receivers: A Software Approach, 2nd ed.; Wiley: Hoboken, NJ, USA, 2005; pp. 73–78. [Google Scholar]
- Volpe, J.A. Vulnerability Assessment of the Transportation Infrastructure Relying On the Global Positioning System. J. Naviga. 2003, 56, 185–193. [Google Scholar]
- Warner, J.; Johnston, R. A Simple Demonstration That the Global Positioning System (GPS) is Vulnerable to Spoofing. J. Secur. Admin. 2002, 25, 19–28. [Google Scholar]
- Humphreys, T.E.; Ledvina, B.M.; Psiaki, M.L.; O Hanlon, B.W.; Kintner, P.M., Jr. Assessing the Spoofng Threat—Development of a Portable GPS Civilian Spoofer. In Proceedings of the 2008 ION GNSS Conference, Savanna, GA, USA, 16–19 September 2008; pp. 1–12. [Google Scholar]
- Tippenhauer, N.O.; Pöpper, C.; Rasmussen, K.B.; Cˇapkun, S. On the Requirements for Successful GPS Spoofing Attacks. In Proceedings of the 18th ACM Conference on Computer and Communications Security, CCS 2011, Chicago, IL, USA, 17–21 October 2011; pp. 1–11. [Google Scholar]
- Cavaleri, A.B.; Motella, M.P.; Fantino, M. Detection of Spoofed GPS Signals at Code and Carrier Tracking Level. In Proceedings of the 5th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC), Noordwijk, The Netherlands, 8–10 December 2010; pp. 1–6. [Google Scholar]
- Wen, H.; Huang, P.Y.-R.; Dyer, J.; Archinal, A.; Fagan, J. Countermeasures for GPS Signal Spoofing. In Proceedings of the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2005), Long Beach, CA, USA, 13–16 September 2005. [Google Scholar]
- Dehghanian, V.; Nielsen, J. GNSS Spoofing Detection Based on a Sequence of RSS Measurements. ION GPS GNSS 2013, 26, 2931–2935. [Google Scholar]
- Borio, D. PANOVA Tests and their Application to GNSS Spoofing Detection. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 381–394. [Google Scholar] [CrossRef]
- Wang, F.; Li, H.; Lu, M. GNSS Spoofing Detection and Mitigation Based on Maximum Likelihood Estimation. Sensors 2017, 17, 1532. [Google Scholar] [CrossRef] [PubMed]
- Jafarnia-Jahromi, A.; Broumandan, A.; Nielsen, J.; Lachapelle, G. GPS Vulnerability to Spoofing Threats and a Review of Anti-spoofing Techniques. Int. J. Navig. Obs. 2012, 2012, 127072. [Google Scholar]
- Wesson, K.D.; Shepard, D.P.; Humphreys, T.E. Straight talk on anti-spoofing. GPS World 2012, 23, 32–39. [Google Scholar]
- Konovaltsev, A.; Cuntz, M.; Haettich, C.; Meurer, M. Autonomous Spoofing Detection and Mitigation in a GNSS Receiver with an Adaptive Antenna Array. ION GPS GNSS 2013, 26, 2937–2948. [Google Scholar]
- Swaszek, P.F.; Pratz, S.A.; Arocho, B.N.; Seals, K.C.; Hartnett, R.J. GNSS Spoof Detection Using Shipboard IMU Measurements. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014; pp. 745–758. [Google Scholar]
- Khanafseh, S.; Roshan, N.; Langel, S.; Chan, F.-C.; Joerger, M.; Pervan, B. GPS Spoofing Detection using RAIM with INS Coupling. In Proceedings of the PLANS 2014, 2014 IEEE/ION, Monterey, CA, USA, 5–8 May 2014; pp. 1232–1239. [Google Scholar]
- Tanil, C.; Khanafseh, S.; Joerger, M.; Pervan, B. An INS monitor to detect GNSS spoofers capable of tracking vehicle position. IEEE Trans. Aerosp. Electron. Syst. 2017, 54, 131–143. [Google Scholar] [CrossRef]
- Lee, J.-H.; Kwon, K.-C.; An, D.-S.; Shim, D.-S. GPS Spoofing Detection using Accelerometers and Performance Analysis with Probability of Detection. Int. J. Control Autom. Syst. 2015, 13, 951–959. [Google Scholar] [CrossRef]
- Bekkeng, J.K. Calibration of a Novel MEMS Inertial Reference Unit. IEEE Trans. Instrum. Meas. 2009, 58, 1967–1974. [Google Scholar] [CrossRef]
- Gao, W.; Zhang, Y.; Wang, J. Research on Initial Alignment and Self-Calibration of Rotary Strapdown Inertial Navigation Systems. Sensors 2015, 15, 3154–3171. [Google Scholar] [CrossRef] [PubMed]
- Grewal, M.S.; Andrews, A.P. Kalman Filtering Theory and Practice; Prentice Hall: Englewood Cliffs, NJ, USA, 1993; pp. 108–118. [Google Scholar]
- Han, S.; Wang, J. A novel method to integrate IMU and magnetometers in attitude and heading reference systems. J. Navig. 2011, 64, 727–738. [Google Scholar] [CrossRef]
- Khedr, M.; El-Sheimy, N. A Smartphone Step Counter Using IMU and Magnetometer for Navigation and Health Monitoring Applications. Sensors 2017, 17, 2573. [Google Scholar] [CrossRef]
- Hellmers, H.; Kasmi, Z.; Norrdine, A.; Eichhorn, A. Accurate 3D Positioning for a Mobile Platform in Non-Line-of-Sight Scenarios Based on IMU/Magnetometer Sensor Fusion. Sensors 2018, 18, 126. [Google Scholar] [CrossRef] [PubMed]
- Patonis, P.; Patias, P.; Tziavos, I.N.; Rossikopoulos, D.; Margaritis, K.G. A Fusion Method for Combining Low-Cost IMU/Magnetometer Outputs for Use in Applications on Mobile Devices. Sensors 2018, 18, 2616. [Google Scholar] [CrossRef]
- Hoyt, R.S. Probability functions for the modulus and angle of the normal complex variate. Bell Syst. Tech. J. 1947, 26, 318–359. [Google Scholar] [CrossRef]
- Youssef, N.; Wang, C.-X.; P¨atzold, M. A Study On The Second Order Statistics Of Nakagami Hoyt Mobile Fading Channelsv. IEEE Trans. Veh. Technol. 2005, 54, 1259–1265. [Google Scholar] [CrossRef]
- Tsagris, M.; Beneki, C.; Hassani, H. On the Folded Normal Distribution. Mathematics 2014, 2, 12–28. [Google Scholar] [CrossRef]

















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kwon, K.-C.; Shim, D.-S. Performance Analysis of Direct GPS Spoofing Detection Method with AHRS/Accelerometer. Sensors 2020, 20, 954. https://doi.org/10.3390/s20040954
Kwon K-C, Shim D-S. Performance Analysis of Direct GPS Spoofing Detection Method with AHRS/Accelerometer. Sensors. 2020; 20(4):954. https://doi.org/10.3390/s20040954
Chicago/Turabian StyleKwon, Keum-Cheol, and Duk-Sun Shim. 2020. "Performance Analysis of Direct GPS Spoofing Detection Method with AHRS/Accelerometer" Sensors 20, no. 4: 954. https://doi.org/10.3390/s20040954
APA StyleKwon, K.-C., & Shim, D.-S. (2020). Performance Analysis of Direct GPS Spoofing Detection Method with AHRS/Accelerometer. Sensors, 20(4), 954. https://doi.org/10.3390/s20040954