Aircraft Engine Prognostics Based on Informative Sensor Selection and Adaptive Degradation Modeling with Functional Principal Component Analysis †


Abstract
1. Introduction
2. Related Theories
2.1. Basics of FPCA
2.2. Bayesian Inference
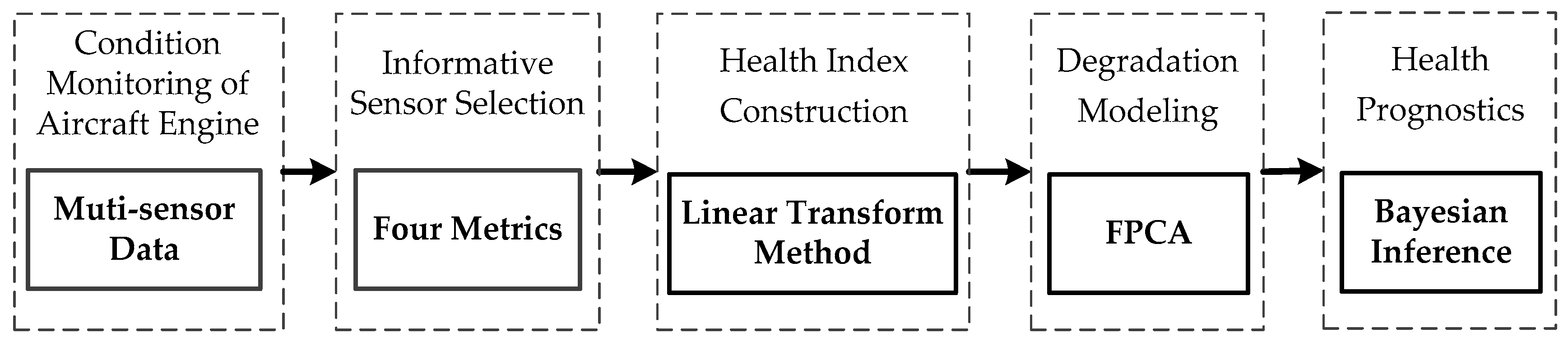
3. The Proposed Method
3.1. Informative Sensor Selection
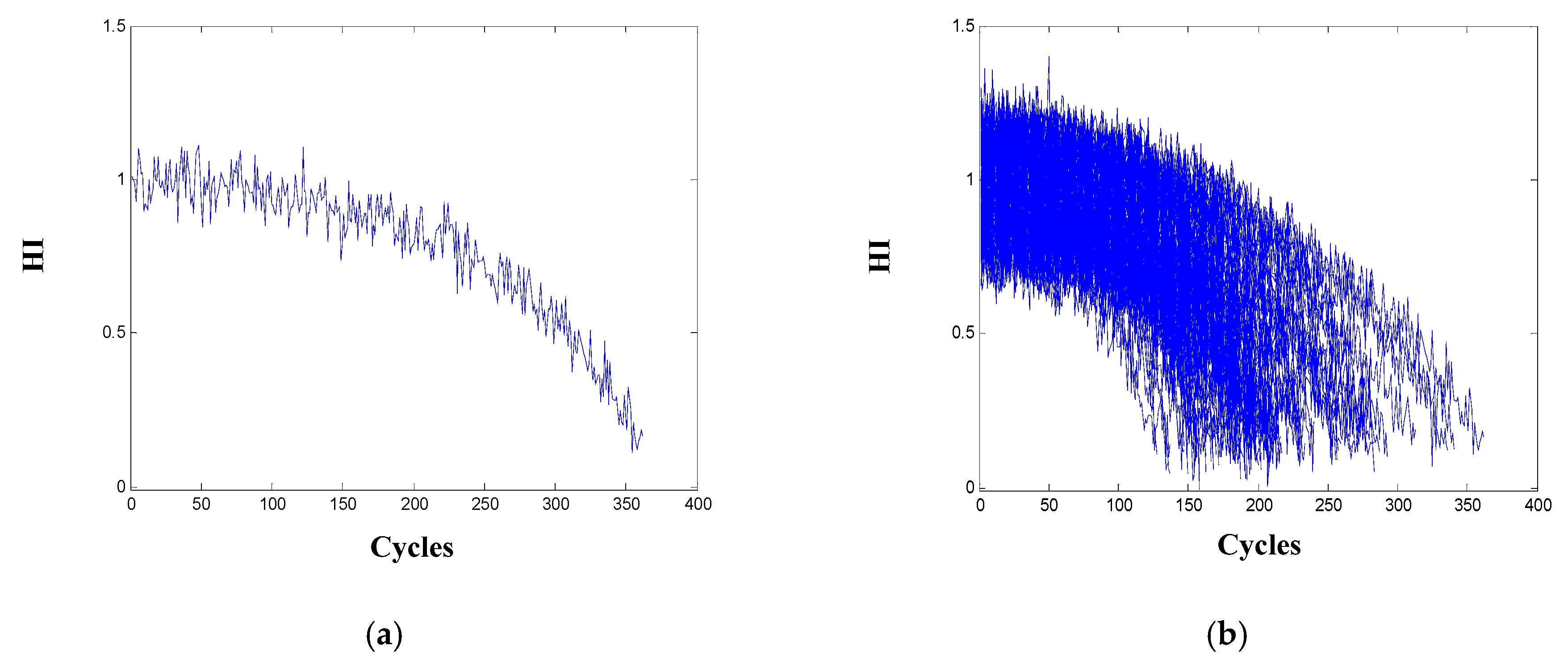
3.2. Health Index Construction
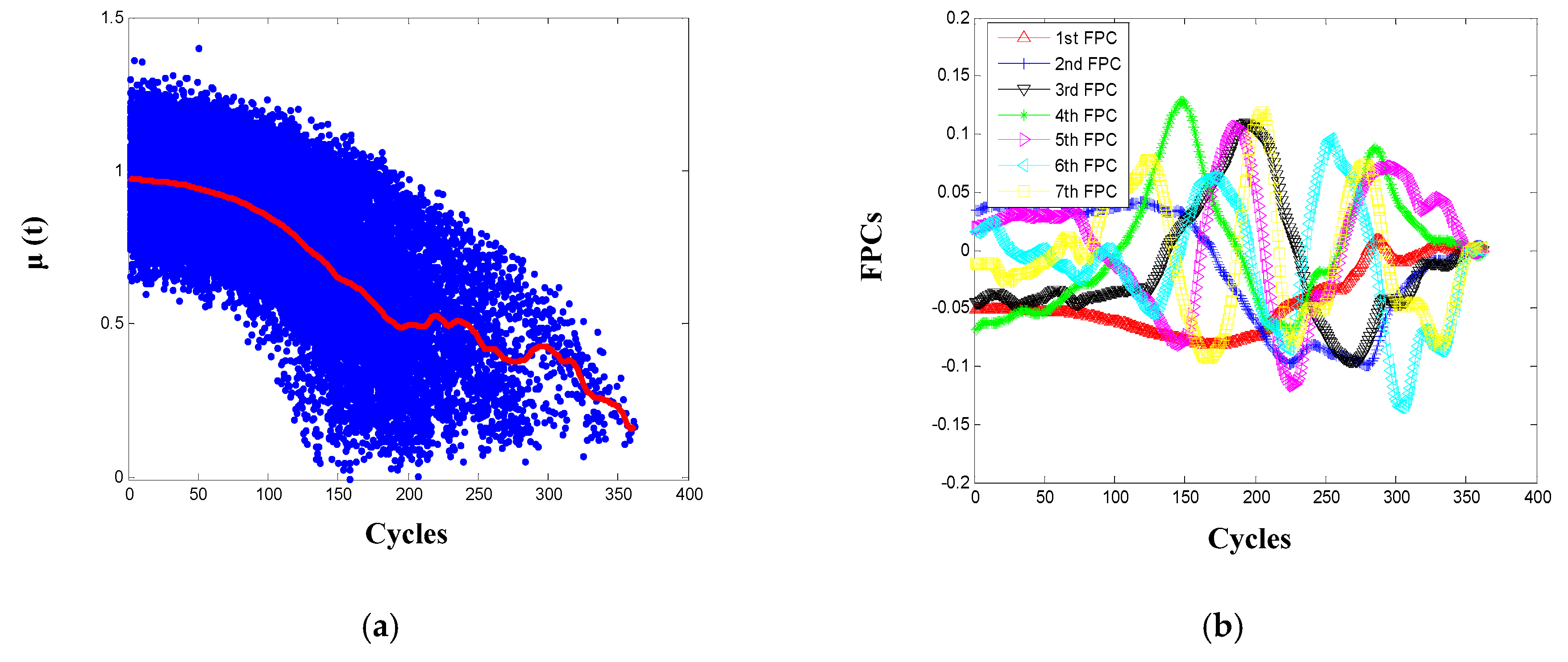
3.3. Degradation Modeling by FPCA
3.4. Prognostics with Bayesian Inference
4. Case Studies and Results Analysis
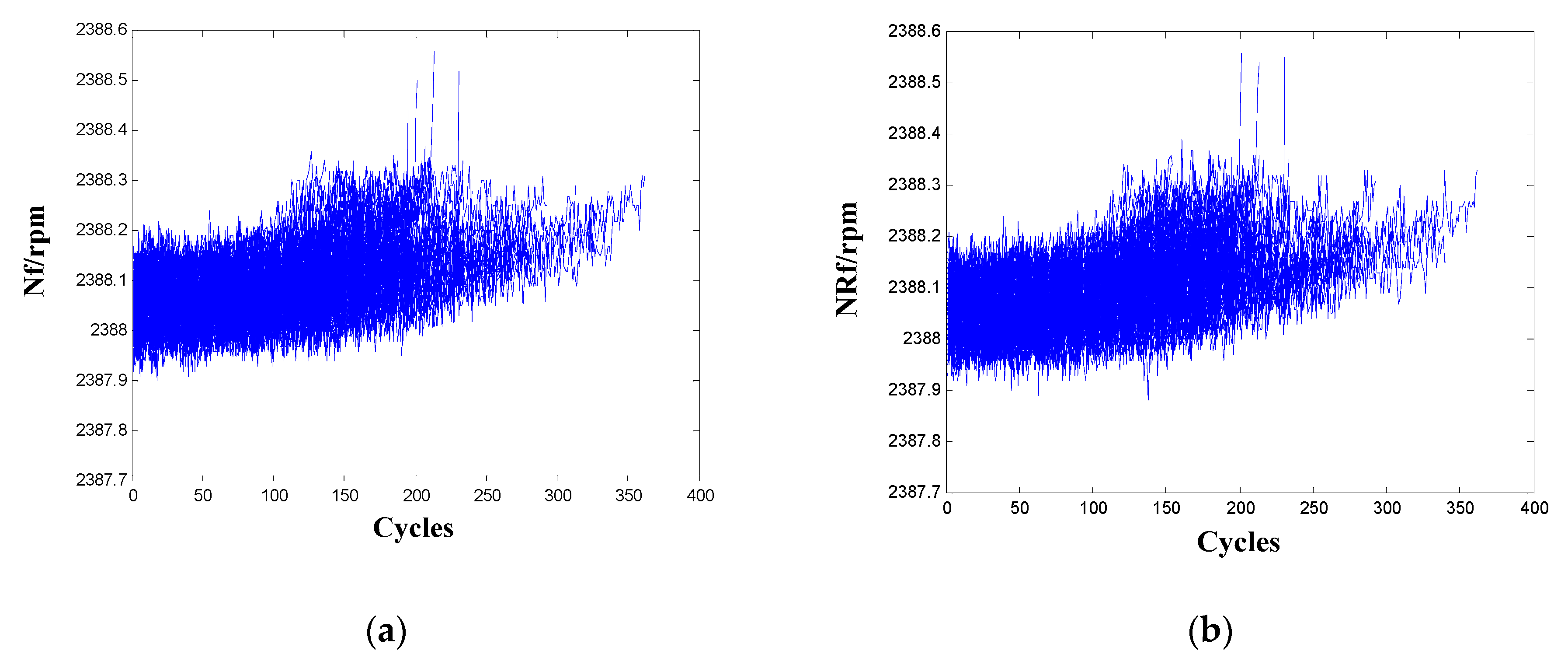
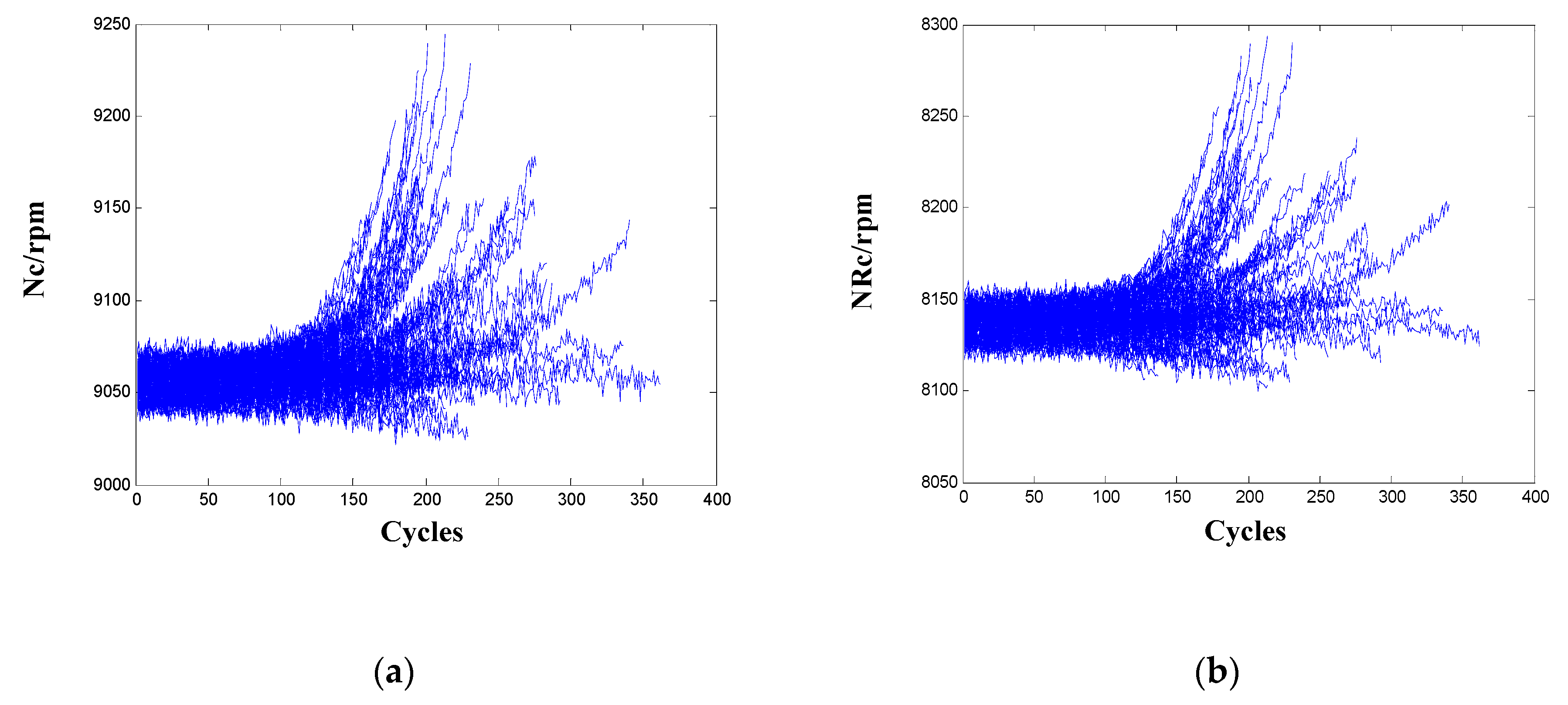
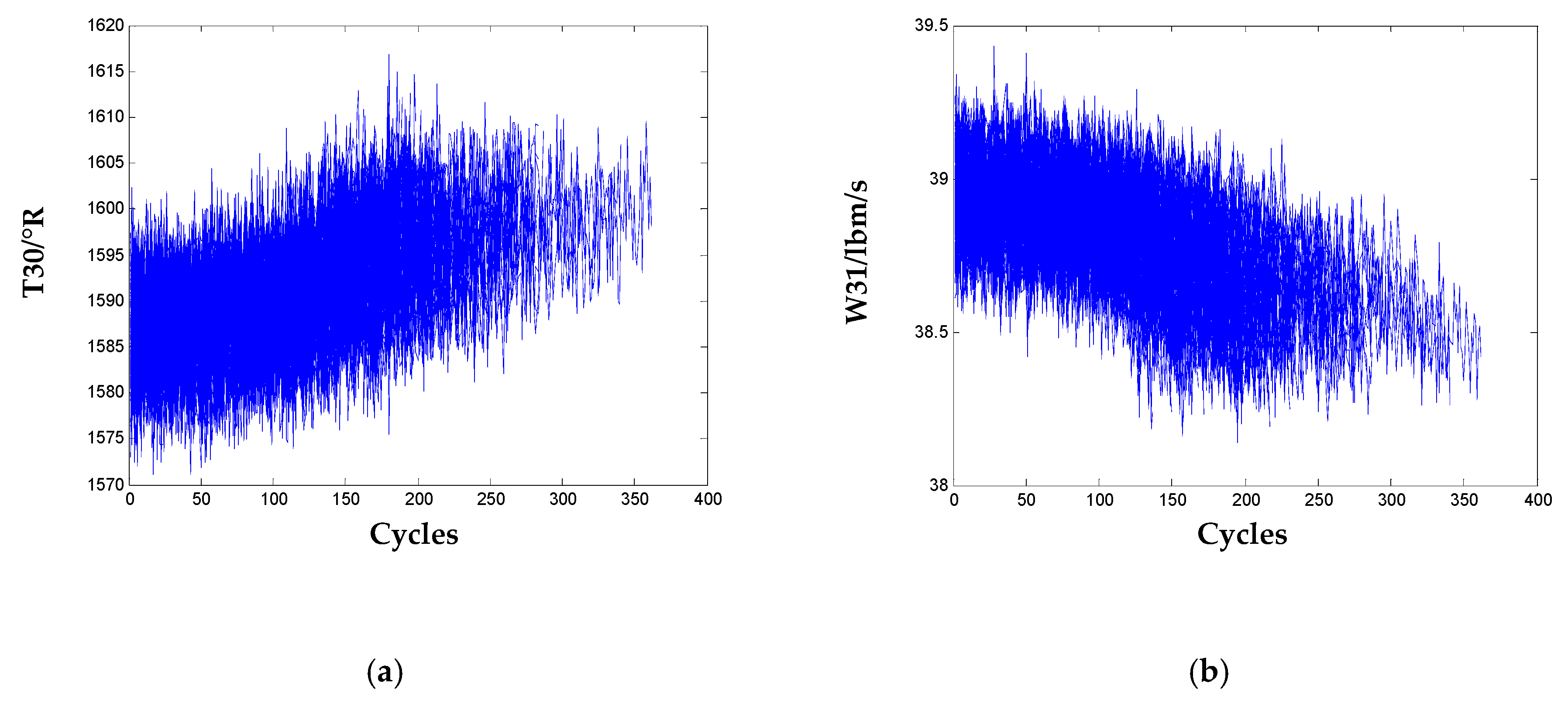
4.1. Sensor Data of Aircraft Engine
4.2. Results and Analysis on Informative Sensor Selection
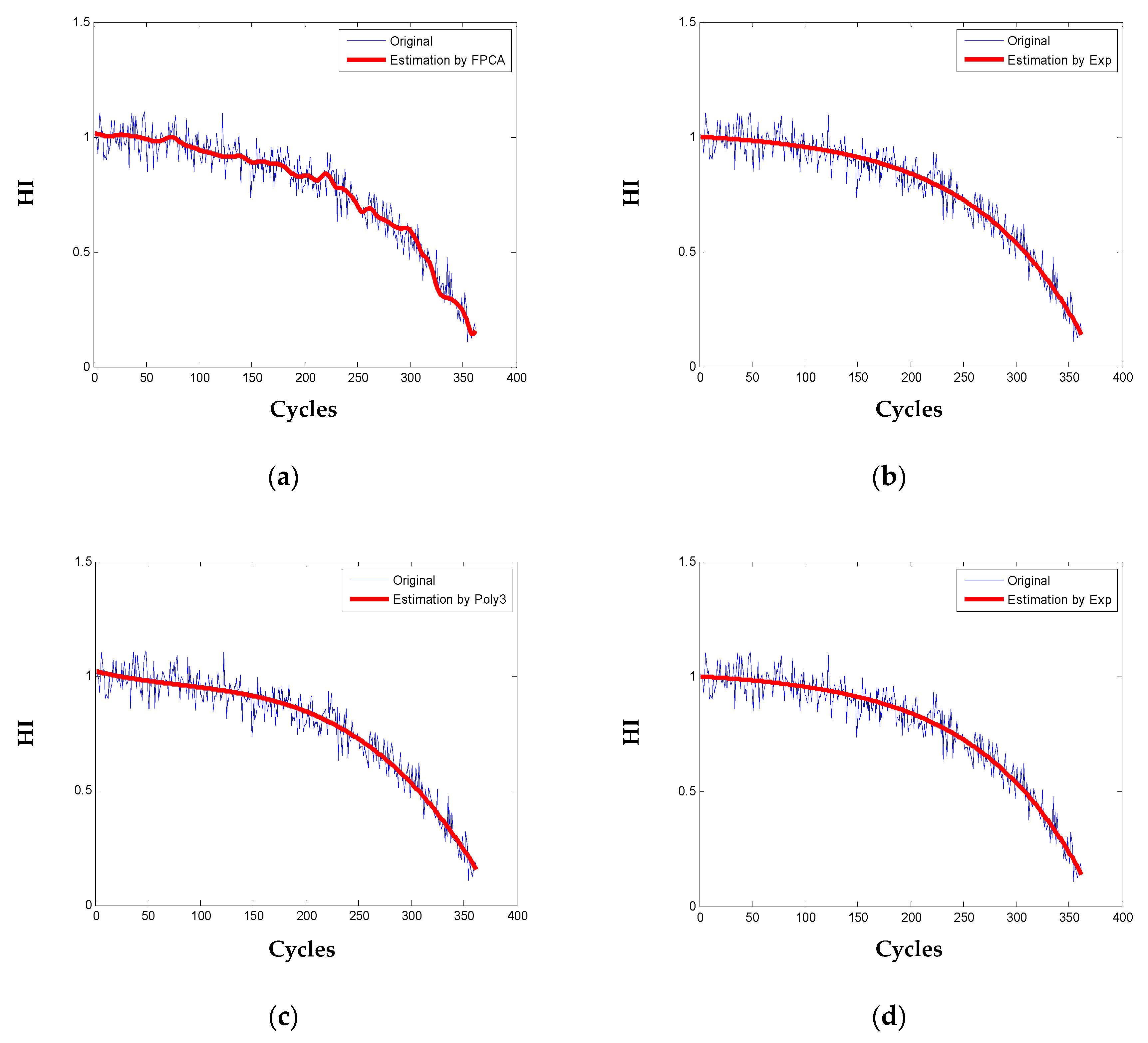
4.3. Results and Analysis on Degradation Modeling
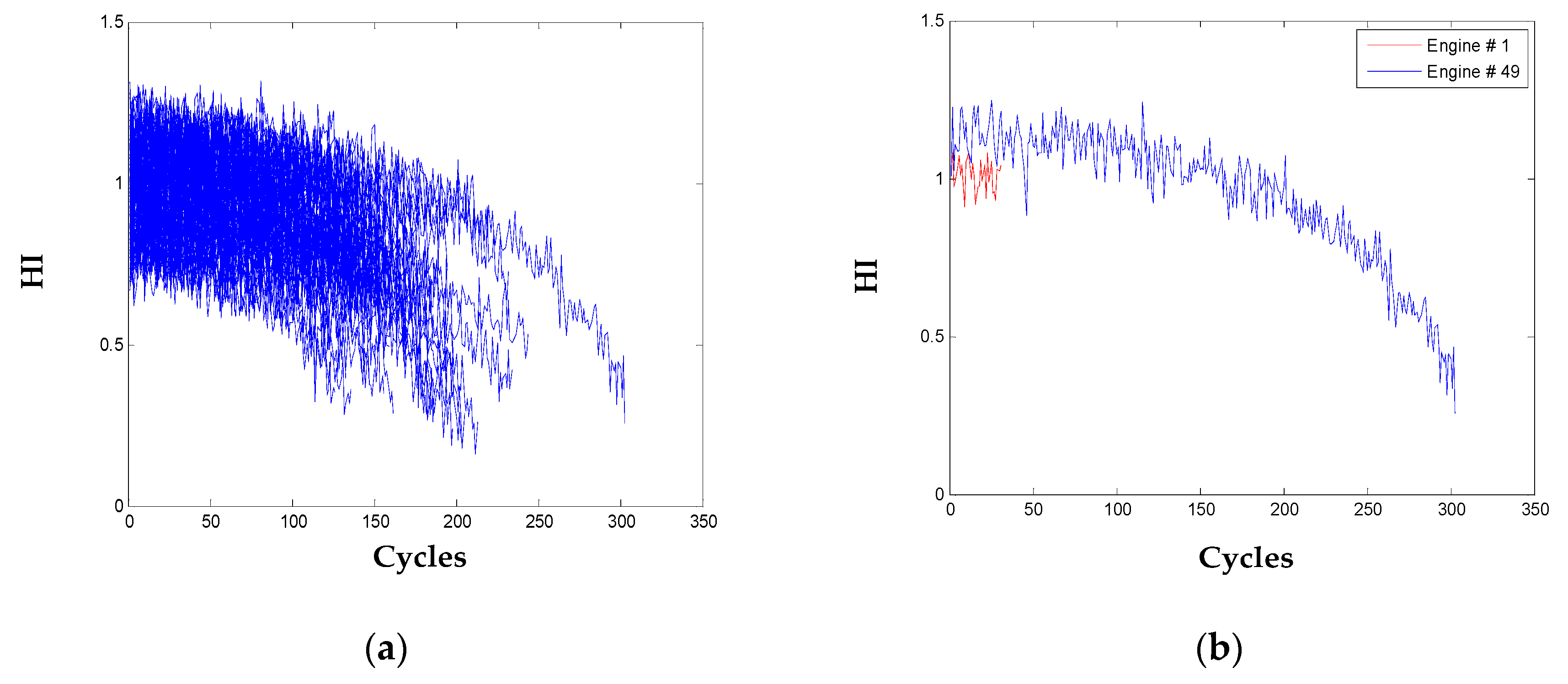
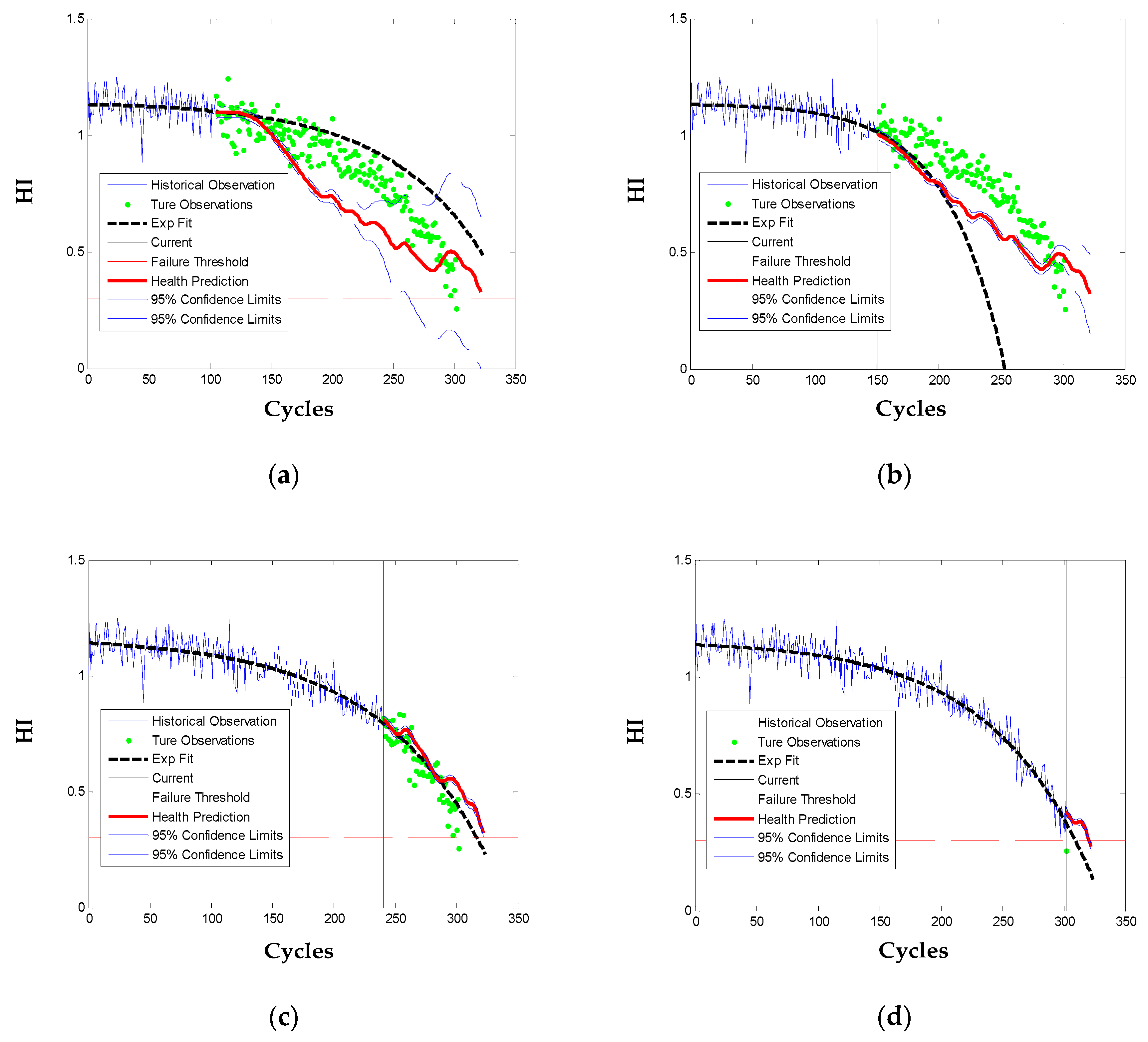
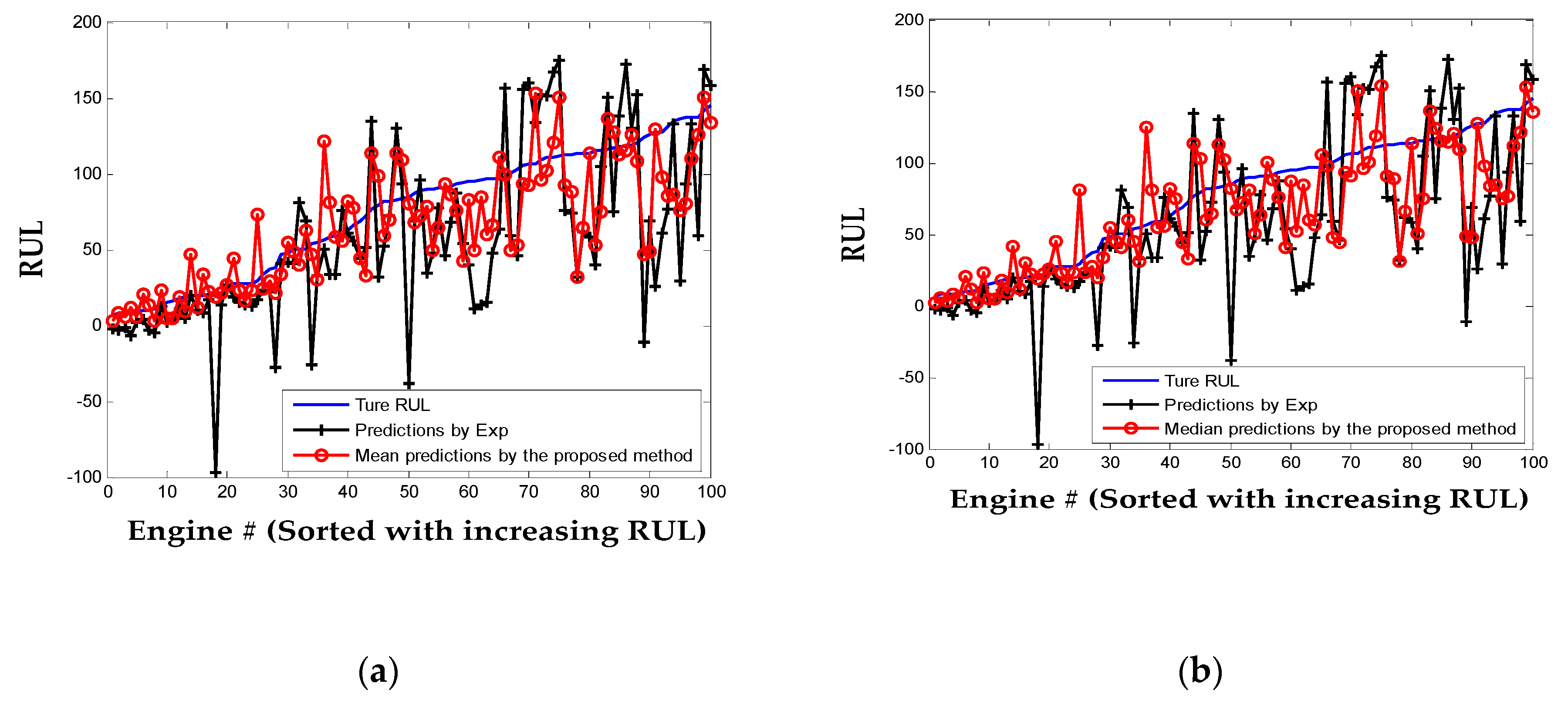
4.4. Results and Analysis on Health Prognostics
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Volponi, A.J. Gas turbine engine health management: Past, present, and future trends. J. Eng. Gas Turbines Power 2014, 136, 051201. [Google Scholar] [CrossRef]
- Lei, Y.G.; Li, N.P.; Guo, L.; Li, N.B.; Yao, T.; Lin, J. Machinery health prognostics: A systematic review from data acquisition to RUL prediction. Mech. Syst. Signal Process. 2018, 104, 799–834. [Google Scholar] [CrossRef]
- Hanachi, H.; Mechefske, C.; Liu, J.; Banerjee, A.; Chen, Y. Performance-based gas turbine health monitoring, diagnostics, and prognostics: A survey. IEEE Trans. Reliab. 2018, 67, 1340–1363. [Google Scholar] [CrossRef]
- Wang, P.; Gao, R.X. Markov nonlinear system estimation for engine performance tracking. J. Eng. Gas Turbines Power 2016, 138, 091201. [Google Scholar] [CrossRef]
- Al-Dahidi, S.; Di Maio, F.; Baraldi, P.; Zio, E. Remaining useful life estimation in heterogeneous fleets working under variable operating conditions. Reliab. Eng. Syst. Saf. 2016, 156, 109–124. [Google Scholar] [CrossRef]
- Yu, J.B. Aircraft engine health prognostics based on logistic regression with penalization regularization and state-space-based degradation framework. Aerosp. Sci. Technol. 2017, 68, 345–361. [Google Scholar] [CrossRef]
- Skordilis, E.; Moghaddass, R. A double hybrid state-Space model for real-time sensor-driven monitoring of deteriorating systems. IEEE Trans. Autom. Sci. Eng. 2019. [Google Scholar] [CrossRef]
- Mosallam, A.; Medjaher, K.; Zerhouni, N. Data-driven prognostic method based on Bayesian approaches for direct remaining useful life prediction. J. Intell. Manuf. 2016, 27, 1037–1048. [Google Scholar] [CrossRef]
- Wang, C.S.; Lu, N.Y.; Cheng, Y.H.; Jiang, B. A data-driven aero-engine degradation prognostic strategy. IEEE Trans. Cybern. 2019. [Google Scholar] [CrossRef]
- Khelif, R.; Chebel-Morello, B.; Malinowski, S.; Laajili, E.; Fnaiech, F.; Zerhouni, N. Direct remaining useful life estimation based on support vector regression. IEEE Trans. Ind. Electron. 2016, 64, 2276–2285. [Google Scholar] [CrossRef]
- Lu, F.; Wu, J.D.; Huang, J.Q.; Qiu, X.J. Aircraft engine degradation prognostics based on logistic regression and novel OS-ELM algorithm. Aerosp. Sci. Technol. 2019, 84, 661–671. [Google Scholar] [CrossRef]
- Huang, C.G.; Huang, H.Z.; Li, Y.F. A Bi-Directional LSTM prognostics method under multiple operational conditions. IEEE Trans. Ind. Electron. 2019, 66, 8792–8802. [Google Scholar] [CrossRef]
- Li, Z.X.; Goebel, K.; Wu, D.Z. Degradation modeling and remaining useful life prediction of aircraft engines using ensemble learning. J. Eng. Gas Turbines Power 2019, 141, 041008. [Google Scholar] [CrossRef]
- Si, X.S.; Wang, W.; Hu, C.H.; Zhou, D.H. Remaining useful life estimation–a review on the statistical data driven approaches. Eur. J. Oper. Res. 2011, 213, 1–14. [Google Scholar] [CrossRef]
- Lasheras, S.F.; Nieto, P.J.G.; De Cos Juez, F.J.; Bayón, R.M.; Suárez, V.M.G. A hybrid PCA-CART-MARS-based prognostic approach of the remaining useful life for aircraft engines. Sensors 2015, 15, 7062–7083. [Google Scholar] [CrossRef] [PubMed]
- Zaidan, M.A.; Mills, A.R.; Harrison, R.F.; Fleming, P.J. Gas turbine engine prognostics using Bayesian hierarchical models: A variational approach. Mech. Syst. Signal Process. 2016, 70–71, 120–140. [Google Scholar] [CrossRef]
- Liu, K.B.; Huang, S. Integration of data fusion methodology and degradation modeling process to improve prognostics. IEEE Trans. Autom. Sci. Eng. 2016, 13, 344–354. [Google Scholar] [CrossRef]
- Song, C.Y.; Liu, K.B. Statistical degradation modeling and prognostics of multiple sensor signals via data fusion: A composite health index approach. IISE Trans. 2018, 50, 853–867. [Google Scholar] [CrossRef]
- Zhang, Z.X.; Si, X.S.; Hu, C.H.; Lei, Y.G. Degradation data analysis and remaining useful life estimation: A review on Wiener-process-based methods. Eur. J. Oper. Res. 2018, 271, 775–796. [Google Scholar] [CrossRef]
- Le Son, K.; Fouladirad, M.; Barros, A. Remaining useful lifetime estimation and noisy gamma deterioration process. Reliab. Eng. Syst. Saf. 2016, 149, 76–87. [Google Scholar] [CrossRef]
- Peng, W.W.; Li, Y.F.; Yang, Y.J.; Mi, J.; Huang, H.Z. Bayesian degradation analysis with inverse Gaussian process models under time-varying degradation rates. IEEE Trans. Reliab. 2017, 66, 84–96. [Google Scholar] [CrossRef]
- Wang, P.F.; Youn, B.D.; Hu, C. A generic probabilistic framework for structural health prognostics and uncertainty management. Mech. Syst. Signal Process. 2012, 28, 622–637. [Google Scholar] [CrossRef]
- Kim, M.; Song, C.; Liu, K. A generic health index approach for multisensor degradation modeling and sensor selection. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1426–1437. [Google Scholar] [CrossRef]
- Coble, J.; Hines, J.W. Applying the general path model to estimation of remaining useful life. Int. J. Progn. Health Manag. 2011, 2, 71–82. [Google Scholar]
- Liu, L.S.; Wang, S.J.; Liu, D.T.; Peng, Y. Quantitative selection of sensor data based on improved permutation entropy for system remaining useful life prediction. Microelectron. Reliab. 2017, 75, 264–270. [Google Scholar] [CrossRef]
- Chehade, A.; Shi, Z.Y. Sensor fusion via statistical hypothesis testing for prognosis and degradation analysis. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1774–1787. [Google Scholar] [CrossRef]
- Fang, X.L.; Paynabar, K.; Gebraeel, N. Multistream sensor fusion-based prognostics model for systems with single failure modes. Reliab. Eng. Syst. Saf. 2017, 159, 322–331. [Google Scholar] [CrossRef]
- Ye, Z.S.; Xie, M. Stochastic modelling and analysis of degradation for highly reliable products. Appl. Stoch. Models Bus. Ind. 2015, 31, 16–32. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, L.J.; Xu, J.W. Degradation feature selection for remaining useful life prediction of rolling element bearings. Qual. Reliab. Eng. Int. 2016, 32, 547–554. [Google Scholar] [CrossRef]
- Shang, H.L. A survey of functional principal component analysis. AStA Adv. Stat. Anal. 2014, 98, 121–142. [Google Scholar] [CrossRef]
- Wang, J.L.; Chiou, J.; Müller, H.G. Functional data analysis. Annu. Rev. Stat. Its Appl. 2016, 3, 257–295. [Google Scholar] [CrossRef]
- Chung, S.; Kontar, R. Functional principal component analysis for extrapolating multi-stream longitudinal data. arXiv Preprint 2019, arXiv:1903.03871. [Google Scholar]
- Ghahramani, Z. Bayesian non-parametrics and the probabilistic approach to modelling. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2013, 371, 20110553. [Google Scholar] [CrossRef] [PubMed]
- Fang, X.L.; Zhou, R.R.; Gebraeel, N. An adaptive functional regression-based prognostic model for applications with missing data. Reliab. Eng. Syst. Saf. 2015, 133, 266–274. [Google Scholar] [CrossRef]
- Yao, F.; Müller, H.G.; Wang, J.L. Functional data analysis for sparse longitudinal data. J. Am. Stat. Assoc. 2005, 100, 577–590. [Google Scholar] [CrossRef]
- Zhou, R.R.; Serban, N.; Gebraeel, N. Degradation applied to residual lifetime prediction using functional data analysis. Ann. Appl. Stat. 2011, 5, 1586–1610. [Google Scholar] [CrossRef]
- Saxena, A.; Goebel, K.; Simon, D.; Eklund, N. Damage Propagation for Aircraft Engine Run-To-Failure Simulation. In Proceedings of the International Conference on Prognostics and Health Management, Denver, CO, USA, 6–9 October 2008. [Google Scholar]
- Saxena, A.; Goebel, K. Turbo Fan Engine Degradation Simulation Dataset. In NASA Ames Prognostics Data Repository; NASA Ames: Moffett Field, CA, USA, 2012. Available online: http://ti.arc.nasa.gov/tech/dash/pcoe/prognostic-data-repository (accessed on 15 August 2018).
- Singh, S.K.; Kumar, S.; Dwivedi, J.P. A novel soft computing method for engine RUL prediction. Multimed. Tools Appl. 2019, 78, 4065–4087. [Google Scholar] [CrossRef]
- Nieto, P.J.G.; García-Gonzalo, E.; Lasheras, S.F.; De Cos Juez, F.J. Hybrid PSO–SVM-based method for forecasting of the remaining useful life for aircraft engines and evaluation of its reliability. Reliab. Eng. Syst. Saf. 2015, 138, 219–231. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Units |
|---|---|---|
| T2 | Total temperature at fan inlet | °R |
| T24 | Total temperature at LPC outlet | °R |
| T30 | Total temperature at HPC outlet | °R |
| T50 | Total temperature at LPT outlet | °R |
| P2 | Pressure at fan inlet | Psia |
| P15 | Total pressure in bypass-duct | Psia |
| P30 | Total pressure at HPC outlet | Psia |
| Nf | Physical fan speed | Rpm |
| Nc | Physical core speed | Rpm |
| epr | Engine pressure ratio (P50/P2) | -- |
| Ps30 | Static pressure at HPC outlet | Psia |
| phi | Ratio of fuel flow to Ps30 | pps/psi |
| NRf | Corrected fan speed | Rpm |
| NRc | Corrected core speed | Rpm |
| BPR | Bypass Ratio | -- |
| farB | Burner fuel-air ratio | -- |
| htBleed | Bleed Enthalpy | -- |
| Nf_dmd | Demanded fan speed | Rpm |
| PCNfR_dmd | Demanded corrected fan speed | Rpm |
| W31 | HPT coolant bleed | lbm/s |
| W32 | LPT coolant bleed | lbm/s |
| Symbol | Mon | Corr | Rob | Pre | Pro | Tre | |||
|---|---|---|---|---|---|---|---|---|---|
| Mean | std | Mean | std | Mean | std | ||||
| T24 | 0.0715 | 0.0397 | 0.8365 | 0.0391 | 0.9997 | 2.1 × 10−5 | 0.8048 | 0.8048 | 0.9679 |
| T30 | 0.0515 | 0.0395 | 0.8241 | 0.0397 | 0.9982 | 1.1 × 10−4 | 0.7619 | 0.7624 | 0.9709 |
| T50 | 0.0929 | 0.0456 | 0.8751 | 0.0294 | 0.9980 | 1.5 × 10−4 | 0.8709 | 0.8709 | 0.9642 |
| P30 | 0.0756 | 0.0533 | 0.8660 | 0.0382 | 0.9995 | 3.0 × 10−5 | 0.8381 | 0.8381 | 0.9660 |
| Nf | 0.1517 | 0.0554 | 0.7986 | 0.1639 | 1.0000 | 6.3 × 10−5 | 0.6543 | 0.6543 | 0.9667 |
| Nc | 0.1482 | 0.1137 | 0.7535 | 0.1797 | 0.9997 | 2.2 × 10−5 | 0.2632 | 0.3250 | 0.9198 |
| Ps30 | 0.1317 | 0.0531 | 0.8818 | 0.0262 | 0.9985 | 8.9 × 10−5 | 0.8671 | 0.8671 | 0.9668 |
| phi | 0.0997 | 0.0494 | 0.8744 | 0.0312 | 0.9996 | 2.6 × 10−5 | 0.8466 | 0.8466 | 0.9693 |
| NRf | 0.1565 | 0.0541 | 0.8027 | 0.1592 | 1.0000 | 5.2 × 10−7 | 0.6630 | 0.6630 | 0.9650 |
| NRc | 0.1574 | 0.1211 | 0.7623 | 0.2004 | 0.9997 | 1.7 × 10−5 | 0.1820 | 0.3106 | 0.9074 |
| BPR | 0.0743 | 0.0451 | 0.8546 | 0.0305 | 0.9983 | 1.0 × 10−4 | 0.8419 | 0.8419 | 0.9719 |
| W31 | 0.0559 | 0.0348 | 0.8544 | 0.0334 | 0.9982 | 1.2 × 10−4 | 0.8289 | 0.8289 | 0.9704 |
| W32 | 0.0661 | 0.0405 | 0.8558 | 0.0366 | 0.9982 | 1.1 × 10−4 | 0.8091 | 0.8091 | 0.9682 |
| Symbol | Mon | Corr | Rob | Pre | Pro | Tre | |||
|---|---|---|---|---|---|---|---|---|---|
| Mean | std | Mean | std | Mean | std | ||||
| T24 | 0.0711 | 0.0427 | 0.8415 | 0.0350 | 0.9997 | 2.7 × 10−5 | 0.7723 | 0.7723 | 0.9708 |
| T30 | 0.0670 | 0.0420 | 0.8261 | 0.0367 | 0.9982 | 1.0 × 10−4 | 0.7991 | 0.7991 | 0.9707 |
| T50 | 0.1020 | 0.0499 | 0.8781 | 0.0253 | 0.9980 | 1.0 × 10−4 | 0.8542 | 0.8542 | 0.9691 |
| P30 | 0.0868 | 0.0404 | 0.8741 | 0.0283 | 0.9995 | 3.0 × 10−5 | 0.8348 | 0.8348 | 0.9714 |
| Nf | 0.1545 | 0.0514 | 0.8334 | 0.1098 | 1.0000 | 6.2 × 10−7 | 0.7024 | 0.7040 | 0.9664 |
| Nc | 0.1339 | 0.1143 | 0.7656 | 0.1827 | 0.9997 | 1.8 × 10−5 | 0.2071 | 0.2946 | 0.9198 |
| Ps30 | 0.1371 | 0.0506 | 0.8847 | 0.0217 | 0.9985 | 8.9 × 10−5 | 0.8878 | 0.8878 | 0.9709 |
| phi | 0.1020 | 0.0501 | 0.8838 | 0.0213 | 0.9996 | 2.8 × 10−5 | 0.8659 | 0.8659 | 0.9649 |
| NRf | 0.1530 | 0.0551 | 0.8256 | 0.1225 | 1.0000 | 6.6 × 10−7 | 0.6990 | 0.6998 | 0.9665 |
| NRc | 0.1388 | 0.1098 | 0.7479 | 0.2379 | 0.9997 | 1.9 × 10−5 | 0.1386 | 0.2760 | 0.9183 |
| BPR | 0.0740 | 0.0473 | 0.8583 | 0.0305 | 0.9983 | 1.1 × 10−4 | 0.8487 | 0.8489 | 0.9660 |
| W31 | 0.0549 | 0.0368 | 0.8532 | 0.0376 | 0.9982 | 1.2 × 10−4 | 0.8388 | 0.8388 | 0.9691 |
| W32 | 0.0607 | 0.0351 | 0.8544 | 0.0330 | 0.9982 | 8.3 × 10−5 | 0.8280 | 0.8280 | 0.9719 |
| Method | SSE | R-Square | RMSE | |||
|---|---|---|---|---|---|---|
| Mean | std | Mean | std | Mean | std | |
| FPCA | 0.6597 | 0.1571 | 0.9305 | 0.0224 | 0.0565 | 0.0026 |
| Exp | 0.6423 | 0.1567 | 0.9324 | 0.0219 | 0.0562 | 0.0025 |
| Poly3 | 0.6673 | 0.1592 | 0.9210 | 0.0219 | 0.0570 | 0.0026 |
| Pow | 0.6736 | 0.1658 | 0.9194 | 0.0222 | 0.0575 | 0.0027 |
| Engine # | RMSE | |||||||
|---|---|---|---|---|---|---|---|---|
| 35% | 50% | 80% | 90% | |||||
| Exp | FPCA | Exp | FPCA | Exp | FPCA | Exp | FPCA | |
| 20 | 3.4 × 104 | 0.0800 | 0.0591 | 0.0880 | 0.0570 | 0.0737 | 0.0664 | 0.0910 |
| 31 | 0.1568 | 0.1345 | 0.9053 | 0.1395 | 0.0638 | 0.0954 | 0.0532 | 0.0829 |
| 34 | 3.4 × 103 | 0.1688 | 1.4623 | 0.1506 | 0.0649 | 0.0981 | 0.0677 | 0.0921 |
| 35 | 0.1599 | 0.0818 | 0.1701 | 0.0730 | 0.1091 | 0.0813 | 0.0535 | 0.0727 |
| 42 | 1.5788 | 0.0960 | 0.1034 | 0.0971 | 0.0710 | 0.0863 | 0.0534 | 0.0659 |
| 49 | 0.1345 | 0.1149 | 0.9053 | 0.1119 | 0.0638 | 0.0752 | 0.0532 | 0.0795 |
| 68 | 2.4974 | 0.1100 | 0.5035 | 0.1246 | 0.0621 | 0.0959 | 0.0844 | 0.0962 |
| 76 | 20.285 | 0.1038 | 0.1593 | 0.1264 | 0.0701 | 0.0969 | 0.0594 | 0.0666 |
| 81 | 0.3026 | 0.1242 | 0.1005 | 0.1292 | 0.1672 | 0.1216 | 0.0624 | 0.0936 |
| 82 | 3.1 × 104 | 0.1052 | 0.5006 | 0.1391 | 0.0735 | 0.0903 | 0.0671 | 0.0661 |
| mean | 6.8 × 103 | 0.1119 | 0.4869 | 0.1179 | 0.0796 | 0.0915 | 0.0611 | 0.0807 |
| Method | Score | RMSE | Rang of Prediction Errors | Under-Predictions | Correct- Predictions | Over-Predictions | |
|---|---|---|---|---|---|---|---|
| Exp | 67,352 | 45.40 | [−135, 63] | 76 | 1 | 23 | |
| FPCA | mean | 3092 | 28.06 | [−82, 65] | 65 | 3 | 32 |
| median | 3567 | 28.70 | [−83, 68] | 67 | 5 | 28 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, B.; Zheng, K.; Huang, Q.; Feng, S.; Zhou, S.; Zhang, Y. Aircraft Engine Prognostics Based on Informative Sensor Selection and Adaptive Degradation Modeling with Functional Principal Component Analysis. Sensors 2020, 20, 920. https://doi.org/10.3390/s20030920
Zhang B, Zheng K, Huang Q, Feng S, Zhou S, Zhang Y. Aircraft Engine Prognostics Based on Informative Sensor Selection and Adaptive Degradation Modeling with Functional Principal Component Analysis. Sensors. 2020; 20(3):920. https://doi.org/10.3390/s20030920
Chicago/Turabian StyleZhang, Bin, Kai Zheng, Qingqing Huang, Song Feng, Shangqi Zhou, and Yi Zhang. 2020. "Aircraft Engine Prognostics Based on Informative Sensor Selection and Adaptive Degradation Modeling with Functional Principal Component Analysis" Sensors 20, no. 3: 920. https://doi.org/10.3390/s20030920
APA StyleZhang, B., Zheng, K., Huang, Q., Feng, S., Zhou, S., & Zhang, Y. (2020). Aircraft Engine Prognostics Based on Informative Sensor Selection and Adaptive Degradation Modeling with Functional Principal Component Analysis. Sensors, 20(3), 920. https://doi.org/10.3390/s20030920