Honeycomb Map: A Bioinspired Topological Map for Indoor Search and Rescue Unmanned Aerial Vehicles

 , , ,
, , ,  and
and
Abstract
1. Introduction
2. Related Works
2.1. Map Generation
2.1.1. Metric Maps
2.1.2. Topological Maps
2.1.3. Hybrid Maps
2.2. Multiple Robots in Environment Mapping
3. Methodology—Bioinspired Mapping Method
3.1. Environment Exploration
3.1.1. Checking If “Not Visited Hexagon List” Is Empty
3.1.2. Getting Id/Hexagon to Explore
3.1.3. Go to Hexagon
3.1.4. Add Hexagon Id into “Visited Hexagon List”
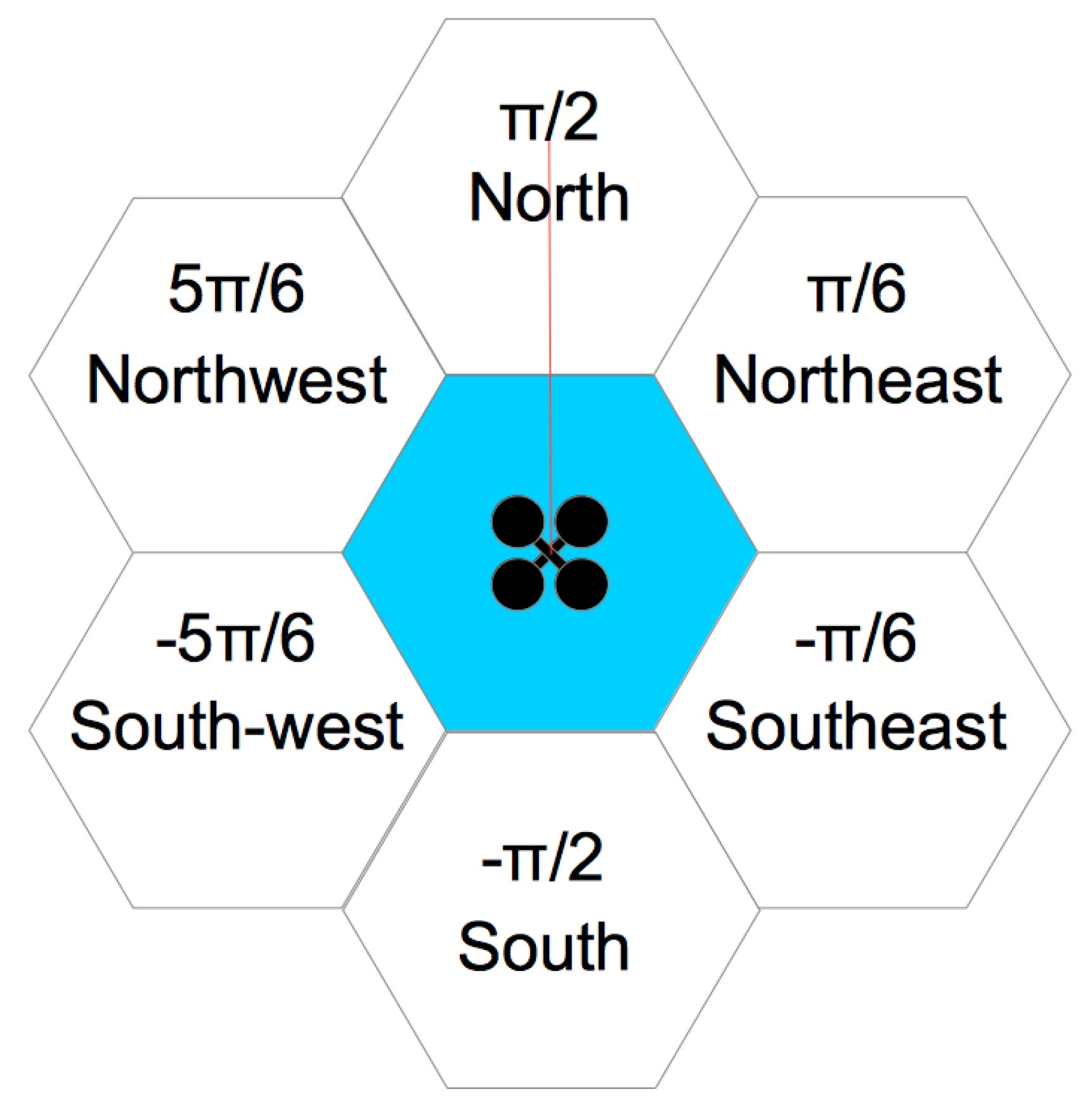
3.1.5. Rotate to Angle and Check If Angle Has Adjacent Hexagon
3.1.6. Add Adjacent Hexagon Id into “Not Visited Hexagon List”
3.1.7. Perform RFB-D and Temperature Reads
| Algorithm 1: RGB-D transformation algorithm. | |||
| 1 | function [ xc , yc , zc ] = TransformRGBD(R, amplitudeRGBD, | ||
| 2 | buffer , xn , yn , angUAV, posUAV) | ||
| 3 | xc = 0 ; | ||
| 4 | yc = 0 ; | ||
| 5 | zc = 0 ; | ||
| 6 | deltaAngleRGBD = double ( amplitudeRGBD)/double ( xn ) ; | ||
| 7 | for i =1:yn | ||
| 8 | for j =1: xn | ||
| 9 | if ( double ( buffer ( i , j ) ) <0.99) | ||
| 10 | angUAVz=rad2deg (angUAV(3) ) ; | ||
| 11 | —nz is the distance in meter. | ||
| 12 | —RGB-D is set to 2m | ||
| 13 | nz=double ( buffer ( i , j ) ) * 2 ; | ||
| 14 | if ( j ==1) | ||
| 15 | dtAng=0; | ||
| 16 | elseif ( j ==xn ) | ||
| 17 | dtAng=amplitudeRGBD ; | ||
| 18 | else | ||
| 19 | dtAng=deltaAngleRGBD*double ( j ) ; | ||
| 20 | end | ||
| 21 | if ( dtAng < amplitudeRGBD/2) | ||
| 22 | alfa =double (angUAVz) +( ( amplitudeRGBD/2)−dtAng ) ; | ||
| 23 | else | ||
| 24 | alfa =double (angUAVz)−(dtAng−(amplitudeRGBD/2) ) ; | ||
| 25 | end | ||
| 26 | alfarad=deg2rad ( alfa ) ; | ||
| 27 | —Sine’ s Law | ||
| 28 | dy = double (nz * sin ( double ( alfarad ) )/sin ( deg2rad ( 9 0 ) ) ) ; | ||
| 29 | dx = nz * sin ( double ( deg2rad(180−90−alfa ) ) )/sin ( deg2rad ( 9 0 ) ) ; | ||
| 30 | —calculate dz | ||
| 31 | angUAVx = rad2deg (angUAV( 1 ) ) ; | ||
| 32 | if ( i ==1) | ||
| 33 | dtAngz=0; | ||
| 34 | elseif ( i==xn ) | ||
| 35 | dtAngz=amplitudeRGBD ; | ||
| 36 | else | ||
| 37 | dtAngz = deltaAngleRGBD*double ( i ) ; | ||
| 38 | end | ||
| 39 | if ( dtAngz < amplitudeRGBD/2) | ||
| 40 | alfaz=double (angUAVx) +( ( amplitudeRGBD/2)−dtAngz ) ; | ||
| 41 | else | ||
| 42 | alfaz=double (angUAVx)−(dtAngz−(amplitudeRGBD/2) ) ; | ||
| 43 | end | ||
| 44 | dz = nz * sin ( double ( deg2rad ( alfaz ) ) )/sin ( deg2rad ( 9 0 ) ) ; | ||
| 45 | xp = posUAV( 1 ) + dx ; | ||
| 46 | yp = posUAV( 2 ) + dy ; | ||
| 47 | zp = posUAV( 3 ) + dz ; | ||
| 48 | —Discretizing values. | ||
| 49 | xc = round ( xp/R) * R; | ||
| 50 | yc = round ( yp/R) * R; | ||
| 51 | zc = round ( zp/R) * R; | ||
| 52 | end | ||
| 53 | end | ||
| 54 | end | ||
| 55 | end | ||
3.1.8. Remove Id from “Not Visited Hexagon List”
3.2. Lock Path Resolution
- Case 1— and :In this scenario, UAV A wants to move to the hexagon of UAV B, and at the same time, UAV B wants to move to the hexagon where UAV A. Here, each UAV calculates its adjacent degree (AD). The UAV that has the largest AD will open the way to the other UAV.
- Case 2—:In this scenario, only UAV A shows that it wants to move to the hexagon of UAV B; however, B will not go to the hexagon of A is. In this case, UAV B may be in an “in exploration” or “stopped” state. If it is in an “in exploration” state, UAV A will recalculate a new path trying to deflect the hexagon occupied by B. If there is only one path, UAV A waits for UAV B to complete its exploration. On the other hand, if UAV B is in a “stopped” state, UAV B itself will identify that UAV A wants to go to the hexagon it occupies. That way, it will calculate your AD and compare it with the UAV A. If your AD is greater, it will move to a free adjacent hexagon, and otherwise, it will try to move to a hexagon adjacent to the UAV A, which causes them to find themselves in Case 1.
- Case 3—, and :In this case, two UAVs are unable to mutually identify a deadlock. So, it is necessary to check if there is a cyclically blocking. Thus, from the hexagon to which you want to move, UAV A checks if there are any others that want to move to where it is. If this block is detected, the UAV calculates its AD, and if it is greater than 0, it will give space for the resolution of the deadlock. After that, the path to the defined hexagon will be recalculated, and then continue your task.
3.3. Simulation
4. Results
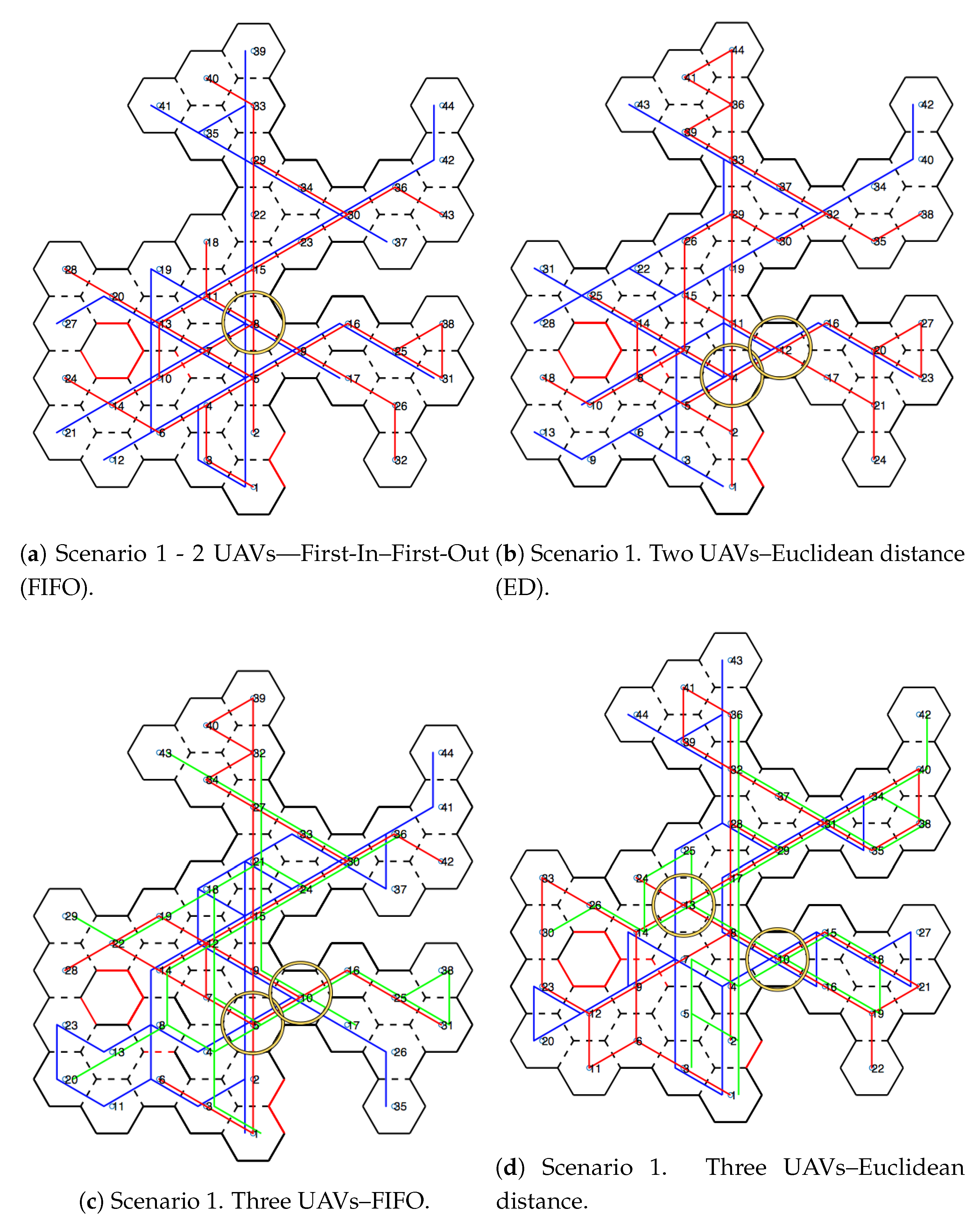
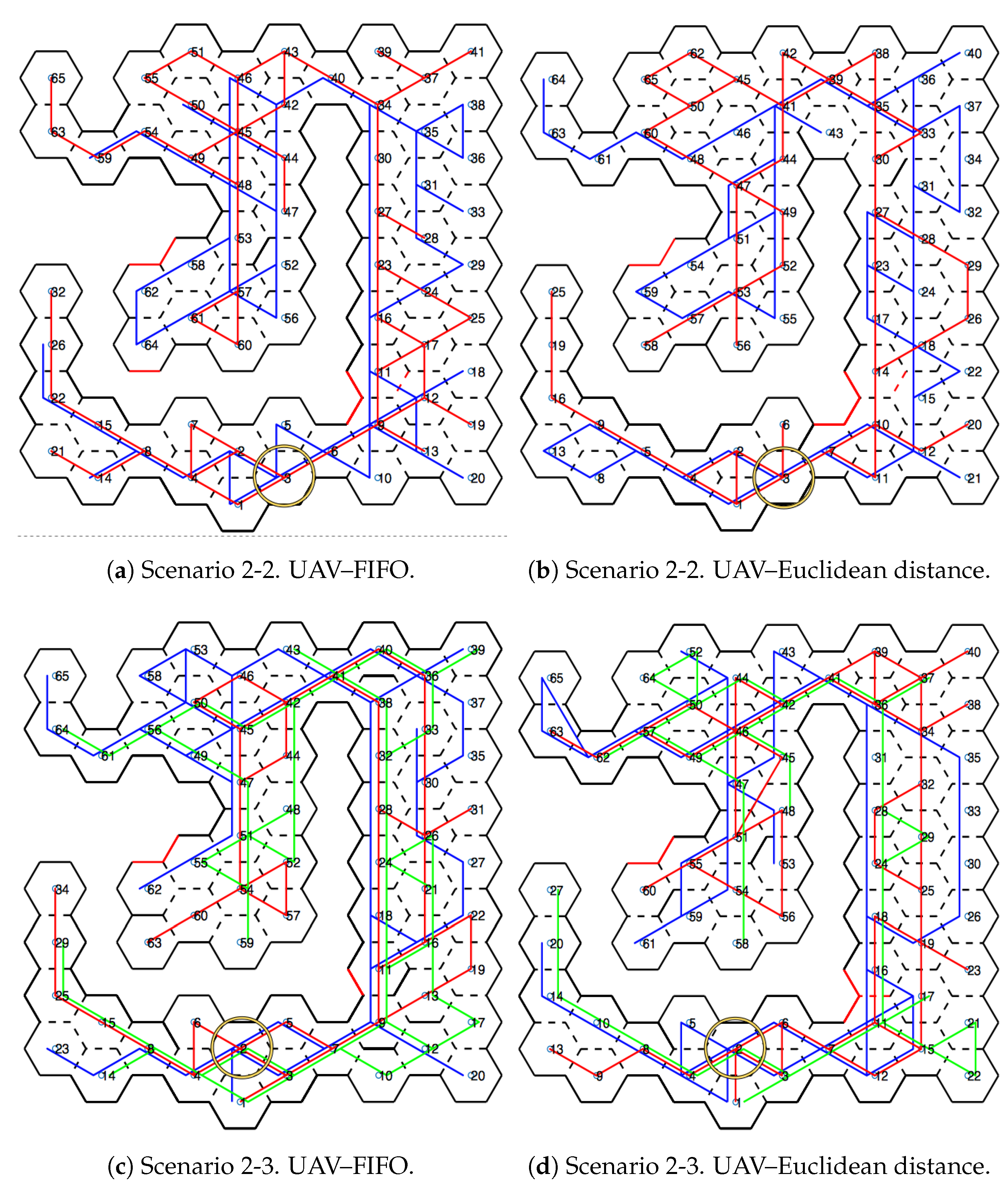
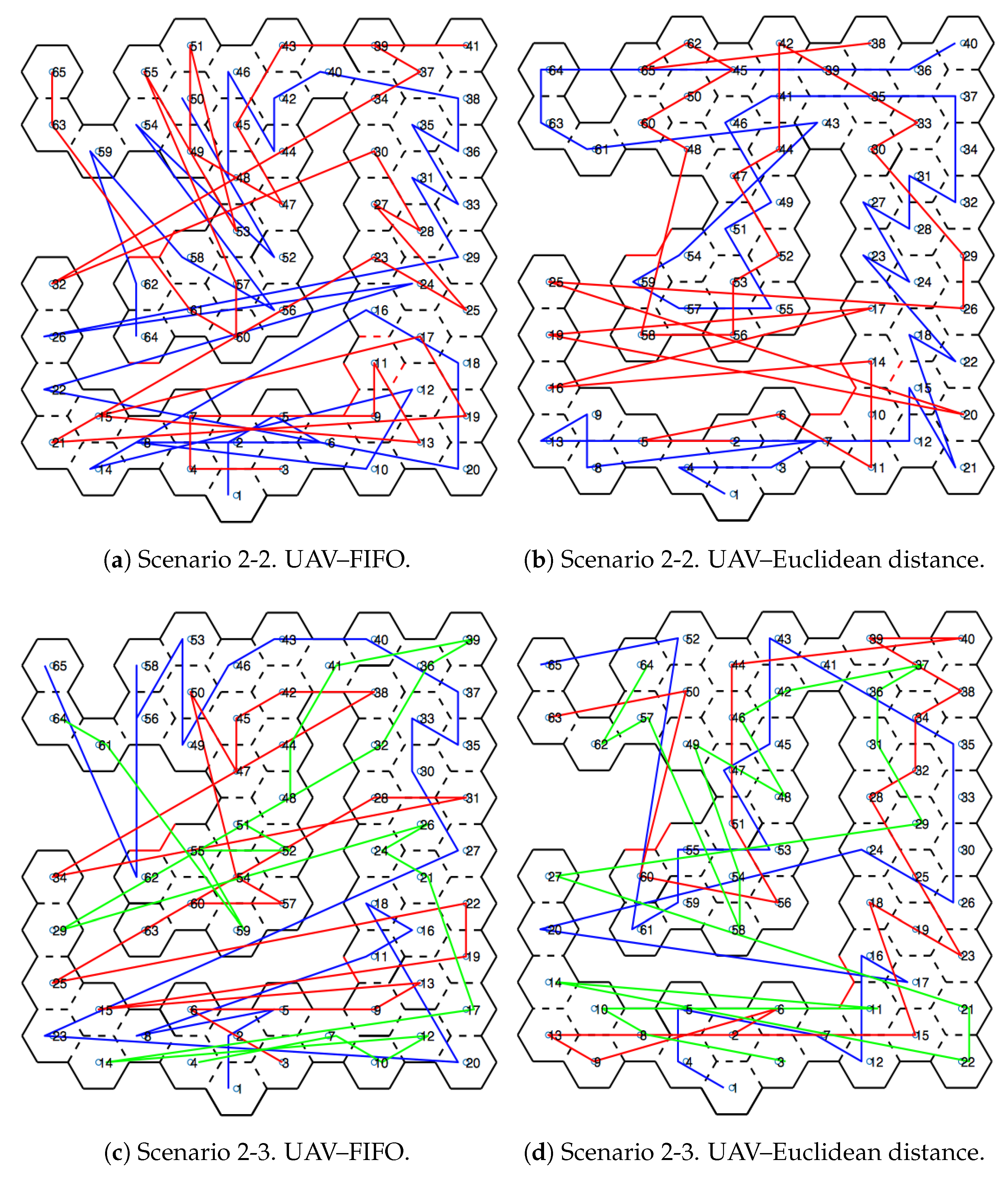
4.1. Scenarios and Honeycomb-Map Generation
4.2. Cube View and Temperature Caption
5. Discussion
6. Conclusions
Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AD | Adjacent Degree |
| ED | Euclidean Distance |
| EKF | Extended Kalman Filter |
| FIFO | First-In–First-Out |
| GPS | Global Positioning Systems |
| IMU | Inertial Measurement Unit |
| IR | Infrared |
| JCBB | Join-compatibility Branch and Bound |
| PTAM | Parallel Tracking and Mapping |
| PTAMM | Parallel Tracking and Multiple Mapping |
| RGB-D | Red, Green, Blue and depth |
| SLAM | Simultaneous Localization and Mapping |
| SPF | Stigmergic Potential Field |
| UAV | Unmanned Aerial Vehicle |
| UGV | Unmanned Ground Vehicle |
| VSLAM | Visual SLAM |
References
- Thrun, S. Robotic Mapping: A Survey; Research paper; School of Computer Science, Carnegie Mellon University: Pittsburgh, PA, USA, 2002. [Google Scholar]
- Saeedi, S.; Trentini, M.; Seto, M.; Li, H. Multiple-Robot Simultaneous Localization and Mapping: A Review. J. Field Robot. 2016, 33, 3–46. [Google Scholar] [CrossRef]
- Nazzi, F. The hexagonal shape of the honeycomb cells depends on the construction behavior of bees. Sci. Rep. 2016, 6, 28341. [Google Scholar] [CrossRef] [PubMed]
- Dhiman, N.K.; Deodhare, D.; Khemani, D. Where am I? Creating spatial awareness in unmanned ground robots using SLAM: A survey. Sadhana 2015, 40, 1385–1433. [Google Scholar] [CrossRef]
- Douglas, D.H.; Peucker, T.K. Algorithms for the Reduction of the Number of Points Required to Represent a Diditized Line or its Caricature. Cartographica 1973, 10, 112–122. [Google Scholar] [CrossRef]
- Jelinek, A. Vector Maps in Mobile Robotics. Acta Polytech. CTU Proc. 2015, 2, 22–28. [Google Scholar] [CrossRef]
- Reimer, A. Cartographic Modelling for Automated Map Generation. Ph.D. Thesis, Technische Universiteit Eindhoven, Eindhoven, The Netherlands, 2015. [Google Scholar]
- Stachniss, C. Coordinated multi-robot exploration. In Robotic Mapping and Exploration; Springer: Berlin, Germany, 2009; pp. 43–71. [Google Scholar]
- Mahendran, A.; Dewan, A.; Soni, N.; Krishna, K.M. UGV-MAV Collaboration for Augmented 2D Maps. In AIR ’13, Proceedings of the Conference on Advances in Robotics; ACM: New York, NY, USA, 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Michael, N.; Shen, S.; Mohta, K.; Mulgaonkar, Y.; Kumar, V.; Nagatani, K.; Okada, Y.; Kiribayashi, S.; Otake, K.; Yoshida, K.; et al. Collaborative mapping of an earthquake-damaged building via ground and aerial robots. J. Field Robot. 2012, 29, 832–841. [Google Scholar] [CrossRef]
- Dewan, A.; Mahendran, A.; Soni, N.; Krishna, K.M. Heterogeneous UGV-MAV exploration using integer programming. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 5742–5749. [Google Scholar]
- McCune, R.R.; Madey, G.R. Agent-based Simulation of Cooperative Hunting with UAVs. In Proceedings of the Agent-Directed Simulation Symposium, Society for Computer Simulation International, San Diego, CA, USA, 7–10 April 2013; p. 8. [Google Scholar]
- Williams, R.; Konev, B.; Coenen, F. Multi-agent Environment Exploration with AR.Drones. In Advances in Autonomous Robotics Systems, Proceedings of the 15th Annual Conference, TAROS 2014, Birmingham, UK, 1–3 September 2014; Mistry, M., Leonardis, A., Witkowski, M., Melhuish, C., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 60–71. [Google Scholar] [CrossRef]
- Loianno, G.; Thomas, J.; Kumar, V. Cooperative localization and mapping of MAVs using RGB-D sensors. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Washington, DC, USA, 26–30 May 2015; pp. 4021–4028. [Google Scholar]
- Rogers, J.G.; Baran, D.; Stump, E.; Young, S.; Christensen, H.I. Cooperative 3D and 2D mapping with heterogenous ground robots. In SPIE Defense, Security, and Sensing; International Society for Optics and Photonics: Bellingham, WA, USA, 2012; p. 838708. [Google Scholar]
- Stipes, J.; Hawthorne, R.; Scheidt, D.; Pacifico, D. Cooperative localization and mapping. In Proceedings of the 2006 IEEE International Conference on Networking, Sensing and Control, Ft. Lauderdale, FL, USA, 23–25 April 2006; pp. 596–601. [Google Scholar]
- Wu, M.; Huang, F.; Wang, L.; Sun, J. Cooperative Multi-Robot Monocular-SLAM Using Salient Landmarks. In Proceedings of the 2009 International Asia Conference on Informatics in Control, Automation and Robotics, Bangkok, Thailand, 1–2 February 2009; pp. 151–155. [Google Scholar] [CrossRef]
- Chellali, R. A distributed multi robot SLAM system for environment learning. In Proceedings of the 2013 IEEE Workshop on Robotic Intelligence in Informationally Structured Space (RiiSS), Singapore, 16–19 April 2013; pp. 82–88. [Google Scholar] [CrossRef]
- Schuster, M.J.; Brand, C.; Hirschmuller, H.; Suppa, M.; Beetz, M. Multi-robot 6D graph SLAM connecting decoupled local reference filters. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 5093–5100. [Google Scholar] [CrossRef]
- Makarenko, A.A.; Williams, S.B.; Bourgault, F.; Durrant-Whyte, H.F. An experiment in integrated exploration. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002; Volume 1, pp. 534–539. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef]
- Aryo, D. Dijkstra Algorithm. MATLAB Central File Exchange. 2020. Available online: https://www.mathworks.com/matlabcentral/fileexchange/36140-dijkstra-algorithm (accessed on 2 January 2020).
- Fukushima, H.; Kon, K.; Matsuno, F. Model Predictive Formation Control Using Branch-and-Bound Compatible With Collision Avoidance Problems. IEEE Trans. Robot. 2013, 29, 1308–1317. [Google Scholar] [CrossRef]
- Gan, S.K.; Fitch, R.; Sukkarieh, S. Real-time decentralized search with inter-agent collision avoidance. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, St Paul, MN, USA, 14–19 May 2012; pp. 504–510. [Google Scholar] [CrossRef]
- Morgan, D.; Chung, S.; Hadaegh, F. Model Predictive Control of Swarms of Spacecraft Using Sequential Convex Programming. J. Guid. Control Dyn. 2014, 37, 1–16. [Google Scholar] [CrossRef]
- Pamosoaji, A.K.; Hong, K. A Path-Planning Algorithm Using Vector Potential Functions in Triangular Regions. IEEE Trans. Syst. Man Cybern. Syst. 2013, 43, 832–842. [Google Scholar] [CrossRef]
- Bekris, K.E.; Grandy, D.K.; Moll, M.; Kavraki, L.E. Safe distributed motion coordination for second-order systems with different planning cycles. Int. J. Robot. Res. 2012, 31, 129–150. [Google Scholar] [CrossRef]
- Zhou, Y.; Hu, H.; Liu, Y.; Ding, Z. Collision and Deadlock Avoidance in Multirobot Systems: A Distributed Approach. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 1712–1726. [Google Scholar] [CrossRef]
- Alonso-Mora, J.; DeCastro, J.A.; Raman, V.; Rus, D.; Kress-Gazit, H. Reactive mission and motion planning with deadlock resolution avoiding dynamic obstacles. Auton. Robot. 2018, 42, 801–824. [Google Scholar] [CrossRef]
- Kanehiro, F.; Hirukawa, H.; Kajita, S. OpenHRP: Open Architecture Humanoid Robotics Platform. Int. J. Robot. Res. 2004, 23, 155–165. [Google Scholar] [CrossRef]
- Koenig, N.P.; Howard, A. Design and use paradigms for Gazebo, an open-source multi-robot simulator. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No.04CH37566), Sendai, Japan, 28 September–2 October 2004; Volume 3, pp. 2149–2154. [Google Scholar]
- Michel, O. WebotsTM: Professional Mobile Robot Simulation. Int. J. Adv. Robot. Syst. 2004, 1. [Google Scholar] [CrossRef]
- Rohmer, E.; Singh, S.P.N.; Freese, M. V-REP: A versatile and scalable robot simulation framework. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1321–1326. [Google Scholar] [CrossRef]
- The Mathworks, Inc. MATLAB Version 9.6.0.1114505 (R2019a). Available online: https://www.mathworks.com/ (accessed on 2 January 2020).




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation | Scenario 1 | Scenario 2 | ||
|---|---|---|---|---|
| Id Hexagon | Traffic Number | Id Hexagon | Traffic Number | |
| Two UAVs–FIFO | 8 | 17 | 3 | 19 |
| Two UAVs–Euclidean distance | 4 and 12 | 8 | 3 | 13 |
| Three UAVs–FIFO | 5 and 10 | 15 | 2 | 21 |
| Three UAVs–Euclidean distance | 10 and 13 | 9 | 12 | 14 |
| Simulation | FIFO | Average/UAV | Euclidean Distance | Average/UAV |
|---|---|---|---|---|
| Two UAVs | 196 | 98 | 143 | 71.5 |
| Three UAVs | 203 | 67 | 169 | 56.33 |
| Variation | - | 31.63% | - | 21.21% |
| Simulation | FIFO | Average/UAV | Euclidean Distance | Average/UAV |
|---|---|---|---|---|
| Two UAVs | 290 | 145 | 206 | 103 |
| Three UAVs | 324 | 108 | 271 | 90.33 |
| Variation | - | 25.51% | - | 12.29% |
| Simulation | Scenario 1 | Scenario 2 |
|---|---|---|
| Two UAVs–FIFO | 2:30:32 | 3:00:17 |
| Two UAVs–Euclidean distance | 2:24:56 | 2:27:58 |
| Three UAVs–FIFO | 3:44:25 | 2:08:09 |
| Three UAVs–Euclidean distance | 3:54:17 | 1:56:08 |
| Scenarios | UAV Number | Exploration Order | |
|---|---|---|---|
| Scenario 1 | Three UAV - Euclidean Distance | ||
| UAV 1 | 1 2 4 7 16 15 14 20 23 27 31 35 34 39 44 43 | ||
| UAV 2 | 3 6 9 11 12 22 21 24 29 28 33 37 40 41 | ||
| UAV 3 | 5 10 8 19 18 13 17 26 25 30 32 38 36 42 | ||
| Two UAV - Euclidean Distance | |||
| UAV 1 | 1 3 6 9 7 10 11 14 16 13 23 19 22 28 30 31 33 37 34 40 43 42 | ||
| UAV 2 | 2 5 4 8 12 17 21 24 20 15 18 25 27 26 29 32 35 38 39 36 41 44 | ||
| Three UAV - FIFO | |||
| UAV 1 | 1 2 6 8 11 15 18 21 23 26 30 33 35 37 41 44 | ||
| UAV 2 | 3 5 9 12 14 16 19 22 25 28 31 34 39 40 42 | ||
| UAV 3 | 4 7 10 13 17 20 24 27 29 32 36 38 43 | ||
| Two UAV - FIFO | |||
| UAV 1 | 1 2 5 7 8 10 12 15 17 19 21 23 25 27 29 31 33 35 37 39 41 42 44 | ||
| UAV 2 | 3 4 6 9 11 13 14 16 18 20 22 24 26 28 30 32 34 36 38 40 43 | ||
| Scenario 2 | Three UAV - Euclidean Distance | ||
| UAV 1 | 1 4 5 7 12 16 17 20 24 26 30 33 35 41 43 45 47 53 55 59 61 52 65 | ||
| UAV 2 | 2 6 9 13 15 18 19 23 25 28 32 34 38 39 40 44 51 56 60 50 63 | ||
| UAV 3 | 3 8 10 11 14 22 21 27 29 31 36 37 42 46 48 49 54 58 57 62 64 | ||
| Two UAV - Euclidean Distance | |||
| UAV 1 | 1 4 3 7 8 9 13 12 15 21 18 22 23 24 27 28 31 32 34 37 41 46 49 51 55 57 59 54 43 61 63 64 36 40 | ||
| UAV 2 | 2 5 6 11 10 14 16 17 19 20 25 26 29 30 33 35 39 42 44 47 52 53 56 58 48 60 50 45 62 65 38 | ||
| Three UAV - FIFO | |||
| UAV 1 | 1 2 5 8 11 16 18 20 23 27 30 33 35 37 40 43 46 49 53 56 58 62 65 | ||
| UAV 2 | 3 6 9 13 15 19 22 25 28 31 34 38 42 45 47 50 54 57 60 63 | ||
| UAV 3 | 4 7 10 12 14 17 21 24 26 29 32 36 39 41 44 48 51 52 55 59 61 64 | ||
| Two UAV - FIFO | |||
| UAV 1 | 1 2 5 6 8 10 12 14 16 18 20 22 24 26 29 31 33 35 36 38 40 42 44 46 48 50 52 54 56 58 59 62 64 | ||
| UAV 2 | 3 4 7 9 11 13 15 17 19 21 23 25 27 28 30 32 34 37 39 41 43 45 47 49 51 53 55 57 60 61 63 65 | ||
| Scenarios | UAV Number | Exploration Order | |
|---|---|---|---|
| Scenario 1 | Three UAV - Euclidean Distance | ||
| UAV 1 | 1 2 4 7 4 10 16 15 10 4 7 14 9 12 20 23 12 9 7 4 10 15 18 21 27 18 15 10 8 17 29 31 35 34 31 29 28 32 39 44 39 36 43 36 32 28 25 13 7 5 3 1 | ||
| UAV 2 | 1 3 6 9 6 11 12 9 7 8 10 16 19 22 19 21 18 15 10 8 13 24 13 17 29 28 17 13 14 9 12 23 30 33 26 14 13 17 28 32 37 31 35 38 40 34 31 29 28 32 36 41 39 32 28 17 8 4 2 | ||
| UAV 3 | 1 2 5 2 4 10 8 10 16 19 18 15 10 8 13 17 13 14 26 14 24 25 13 14 26 30 26 14 13 17 28 32 28 29 31 35 38 34 31 37 32 36 32 37 31 34 40 42 40 34 31 29 17 8 4 7 5 3 | ||
| Two UAV - Euclidean Distance | |||
| UAV 1 | 1 3 6 9 6 5 7 8 10 8 7 11 7 14 7 4 12 16 12 4 5 6 9 13 9 6 5 4 12 16 20 23 20 16 12 11 19 15 22 25 28 25 14 15 19 30 19 15 14 25 31 25 22 26 29 33 37 32 34 40 34 32 37 33 39 43 39 33 37 32 34 40 42 40 34 32 30 19 11 4 5 3 1 | ||
| UAV 2 | 1 2 5 4 5 8 5 4 12 17 21 24 21 20 16 12 11 15 7 8 10 18 10 8 14 25 14 7 4 12 16 20 23 27 20 16 12 11 15 26 29 30 32 35 38 35 32 37 33 39 36 41 44 36 33 29 19 11 4 2 | ||
| Three UAV - FIFO | |||
| UAV 1 | 1 2 5 2 3 6 8 6 11 6 8 4 5 9 15 18 21 15 12 14 8 6 11 20 23 13 8 4 5 10 17 26 17 10 9 15 24 30 33 21 15 9 10 17 26 35 26 17 10 9 12 18 21 24 30 37 36 41 44 41 36 30 24 15 9 5 4 | ||
| UAV 2 | 1 3 6 3 1 2 5 9 12 14 7 5 10 16 10 9 12 19 22 14 7 5 10 16 25 16 10 5 7 14 22 28 22 14 7 5 10 16 25 31 25 16 10 5 7 12 15 21 27 34 32 39 40 32 27 33 30 36 42 36 30 24 15 9 5 2 | ||
| UAV 3 | 1 3 4 7 5 10 5 4 8 13 8 4 5 10 17 10 5 4 8 13 20 13 8 14 12 15 24 21 27 21 18 19 22 29 22 19 18 21 27 32 27 33 30 36 30 24 15 9 10 16 25 31 38 25 16 10 9 15 21 27 34 43 34 27 21 18 12 7 4 3 | ||
| Two UAV - FIFO | |||
| UAV 1 | 1 2 5 7 8 7 10 6 12 6 4 5 8 15 8 9 17 9 8 11 19 13 10 14 21 14 10 7 8 15 23 15 8 9 16 25 16 9 5 7 13 20 27 20 13 11 15 22 29 22 15 8 9 16 25 31 25 16 9 8 15 22 29 33 35 29 34 30 37 30 34 29 33 39 33 35 41 35 29 34 30 36 42 44 42 36 30 23 15 8 5 4 3 1 | ||
| UAV 2 | 1 3 4 6 4 5 9 8 11 13 10 14 6 4 5 9 16 9 8 11 18 11 13 20 13 11 15 22 15 8 7 10 14 24 14 6 4 5 9 17 26 17 9 5 7 13 20 28 20 13 11 15 23 30 23 15 8 9 17 26 32 26 17 9 8 15 22 29 34 30 36 30 23 15 8 9 16 25 31 38 25 16 9 8 15 22 29 33 40 33 29 34 30 36 43 36 30 23 15 8 5 2 | ||
| Scenario 2 | Three UAV - Euclidean Distance | ||
| UAV 1 | 1 4 5 2 3 7 12 11 16 17 11 7 3 2 4 8 10 14 20 14 10 8 4 2 3 7 12 15 17 16 18 24 18 19 26 30 33 35 34 36 41 43 42 45 47 46 47 48 53 48 47 51 55 59 61 59 54 51 47 46 44 52 44 50 57 62 65 63 62 57 49 46 42 41 36 31 28 24 18 16 11 7 6 2 1 | ||
| UAV 2 | 1 2 3 6 2 4 8 9 13 9 8 4 2 6 7 11 15 11 16 18 19 23 19 25 24 28 32 34 38 34 36 39 37 40 37 36 41 42 44 46 45 51 48 51 55 51 48 53 56 54 55 60 55 51 47 46 50 57 49 57 50 57 50 57 49 57 62 63 62 57 49 46 42 41 39 37 34 32 29 25 19 17 15 12 7 6 2 | ||
| UAV 3 | 1 3 7 3 2 4 8 10 8 4 2 3 7 11 7 3 2 4 8 10 14 10 8 4 2 3 7 11 15 22 21 15 11 17 11 7 3 2 4 8 10 14 20 27 20 14 10 8 4 2 3 7 11 16 18 24 29 28 31 36 37 36 41 42 46 45 48 45 46 49 47 51 54 58 54 51 47 49 57 62 57 50 57 50 52 64 50 44 42 41 36 31 28 24 18 16 11 7 3 | ||
| Two UAV - Euclidean Distance | |||
| UAV 1 | 1 4 1 3 7 3 2 4 5 8 5 9 13 8 5 4 2 3 7 10 12 15 12 21 12 15 18 15 22 18 17 23 24 23 27 28 31 32 34 37 33 35 39 41 46 41 44 49 51 49 52 55 53 57 59 54 51 47 44 41 43 41 46 48 60 61 63 64 63 61 60 48 46 41 39 35 36 40 36 33 31 28 24 18 15 12 11 7 3 1 | ||
| UAV 2 | 1 2 4 5 4 2 3 6 3 7 11 10 14 10 7 3 1 4 5 9 16 9 5 4 2 3 7 10 14 17 14 10 7 3 2 4 5 9 16 19 16 9 5 4 2 3 7 10 12 20 12 10 7 3 2 4 5 9 16 19 25 19 16 9 5 4 2 3 7 10 14 18 26 29 28 27 30 33 35 39 42 41 44 47 49 52 53 56 53 57 58 57 53 51 47 48 60 50 45 62 65 50 45 41 39 38 35 30 27 23 17 14 10 7 3 2 | ||
| Three UAV - FIFO | |||
| UAV 1 | 1 2 5 2 4 8 4 2 3 7 9 11 16 18 11 9 12 20 12 9 7 3 2 4 8 14 23 14 8 4 2 3 7 9 11 16 22 27 26 30 33 30 35 37 36 40 36 39 36 38 41 40 41 38 41 40 41 40 41 38 43 46 45 49 45 46 53 50 56 50 53 58 50 45 47 51 55 62 55 51 47 49 56 61 56 49 56 61 64 65 64 61 56 49 45 42 41 38 32 28 24 18 11 9 7 5 2 1 | ||
| UAV 2 | 1 3 2 3 2 3 2 4 6 2 3 7 9 13 9 7 3 2 4 8 15 8 4 2 3 7 9 13 19 22 16 11 9 7 3 2 4 8 15 25 15 8 4 2 3 7 9 11 18 24 28 26 31 26 21 16 11 9 7 3 2 4 8 15 25 29 34 29 25 15 8 4 2 3 7 9 11 18 24 28 32 38 41 42 45 47 44 42 46 50 45 47 51 54 52 57 54 60 63 60 54 51 47 44 42 41 40 36 33 30 26 21 16 11 9 7 5 2 | ||
| UAV 3 | 1 3 7 3 2 4 8 10 8 4 2 3 7 11 7 3 2 4 8 10 14 10 8 4 2 3 7 11 15 22 21 15 11 17 11 7 3 2 4 8 10 14 20 27 20 14 10 8 4 2 3 7 11 16 18 24 29 28 31 36 37 36 41 42 46 45 48 45 46 49 47 51 54 58 54 51 47 49 57 62 57 50 57 50 52 64 50 44 42 41 36 31 28 24 18 16 11 7 3 | ||
| Two UAV - FIFO | |||
| UAV 1 | 1 2 3 5 6 3 2 4 8 4 2 3 6 10 9 12 9 6 3 2 4 8 14 8 4 2 3 6 9 11 16 11 12 18 12 13 20 13 9 6 3 2 4 8 15 22 15 8 4 2 3 6 9 11 16 24 16 11 9 6 3 2 4 8 15 22 26 22 15 8 4 2 3 6 9 11 16 24 29 28 31 33 31 35 36 38 35 34 40 42 44 42 46 45 48 45 50 45 44 47 52 47 48 49 54 49 48 47 52 56 57 53 58 53 48 49 54 59 54 49 48 53 58 62 64 61 57 52 47 44 42 40 34 30 27 23 16 11 9 6 3 1 | ||
| UAV 2 | 1 3 1 4 7 2 3 6 9 11 9 13 9 6 3 2 4 8 15 8 4 2 3 6 9 11 17 12 19 12 9 6 3 2 4 8 14 21 14 8 4 2 3 6 9 11 16 23 16 17 25 24 23 27 28 27 30 27 23 16 11 9 6 3 2 4 8 15 22 26 32 26 22 15 8 4 2 3 6 9 11 16 23 27 30 34 37 39 37 41 37 34 40 43 42 45 44 47 44 45 49 45 46 51 46 45 48 53 48 45 46 51 55 50 45 48 53 48 53 57 60 61 57 53 48 49 54 59 63 65 63 59 54 49 45 46 43 40 34 30 27 23 16 11 9 6 3 2 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
da Rosa, R.; Aurelio Wehrmeister, M.; Brito, T.; Lima, J.L.; Pereira, A.I.P.N. Honeycomb Map: A Bioinspired Topological Map for Indoor Search and Rescue Unmanned Aerial Vehicles. Sensors 2020, 20, 907. https://doi.org/10.3390/s20030907
da Rosa R, Aurelio Wehrmeister M, Brito T, Lima JL, Pereira AIPN. Honeycomb Map: A Bioinspired Topological Map for Indoor Search and Rescue Unmanned Aerial Vehicles. Sensors. 2020; 20(3):907. https://doi.org/10.3390/s20030907
Chicago/Turabian Styleda Rosa, Ricardo, Marco Aurelio Wehrmeister, Thadeu Brito, José Luís Lima, and Ana Isabel Pinheiro Nunes Pereira. 2020. "Honeycomb Map: A Bioinspired Topological Map for Indoor Search and Rescue Unmanned Aerial Vehicles" Sensors 20, no. 3: 907. https://doi.org/10.3390/s20030907
APA Styleda Rosa, R., Aurelio Wehrmeister, M., Brito, T., Lima, J. L., & Pereira, A. I. P. N. (2020). Honeycomb Map: A Bioinspired Topological Map for Indoor Search and Rescue Unmanned Aerial Vehicles. Sensors, 20(3), 907. https://doi.org/10.3390/s20030907