3D Trajectory Planning Method for UAVs Swarm in Building Emergencies





Abstract
1. Introduction
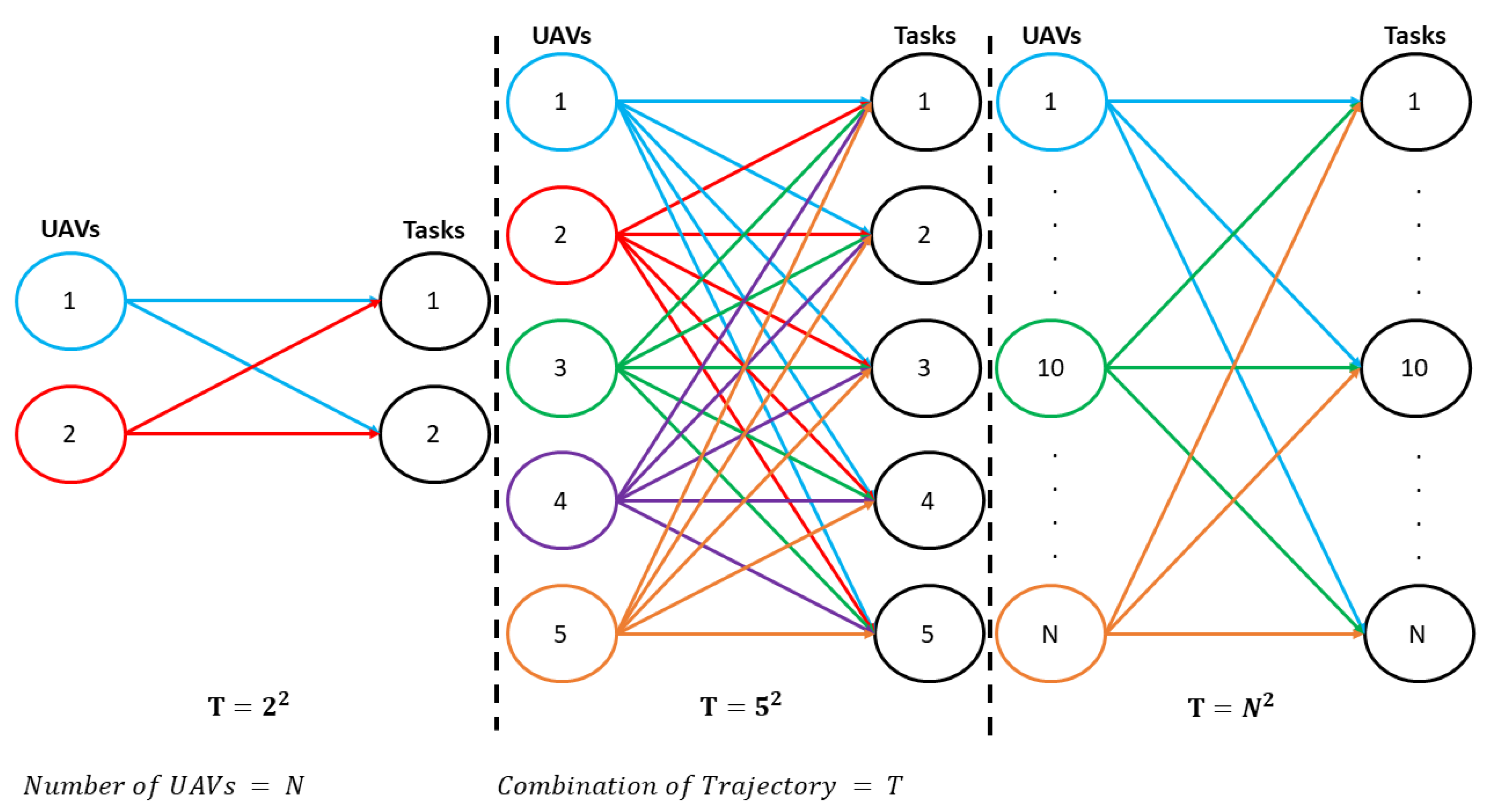
- Task Planning: For a set of vehicles and set of destinations, the most optimal vehicle-objective combination is established, considering aspects such as the speed and endurance of the vehicle, the distance to the goal, and the task to be undertaken [13].
- Trajectory Planning (or required movements): Once the objective has been assigned, safe and efficient paths are generated for one or more vehicles to be able capable of reaching this location [14].
2. Related Works
2.1. 3D Path Planning
2.2. Emergency Drones Applications
3. 3D Multi-Trajectory Planning Based on PRM
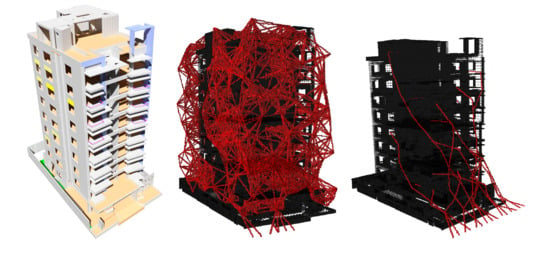
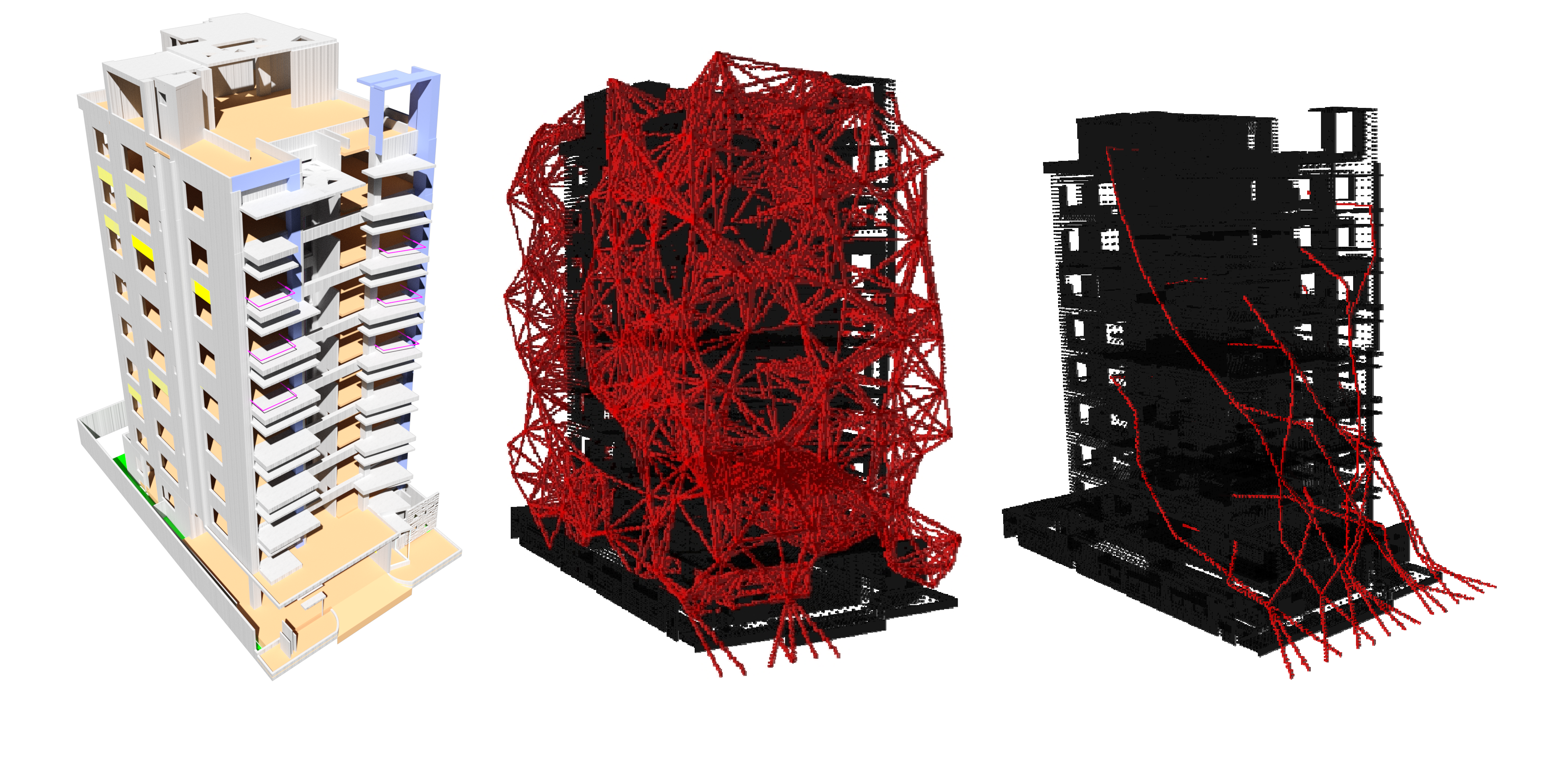
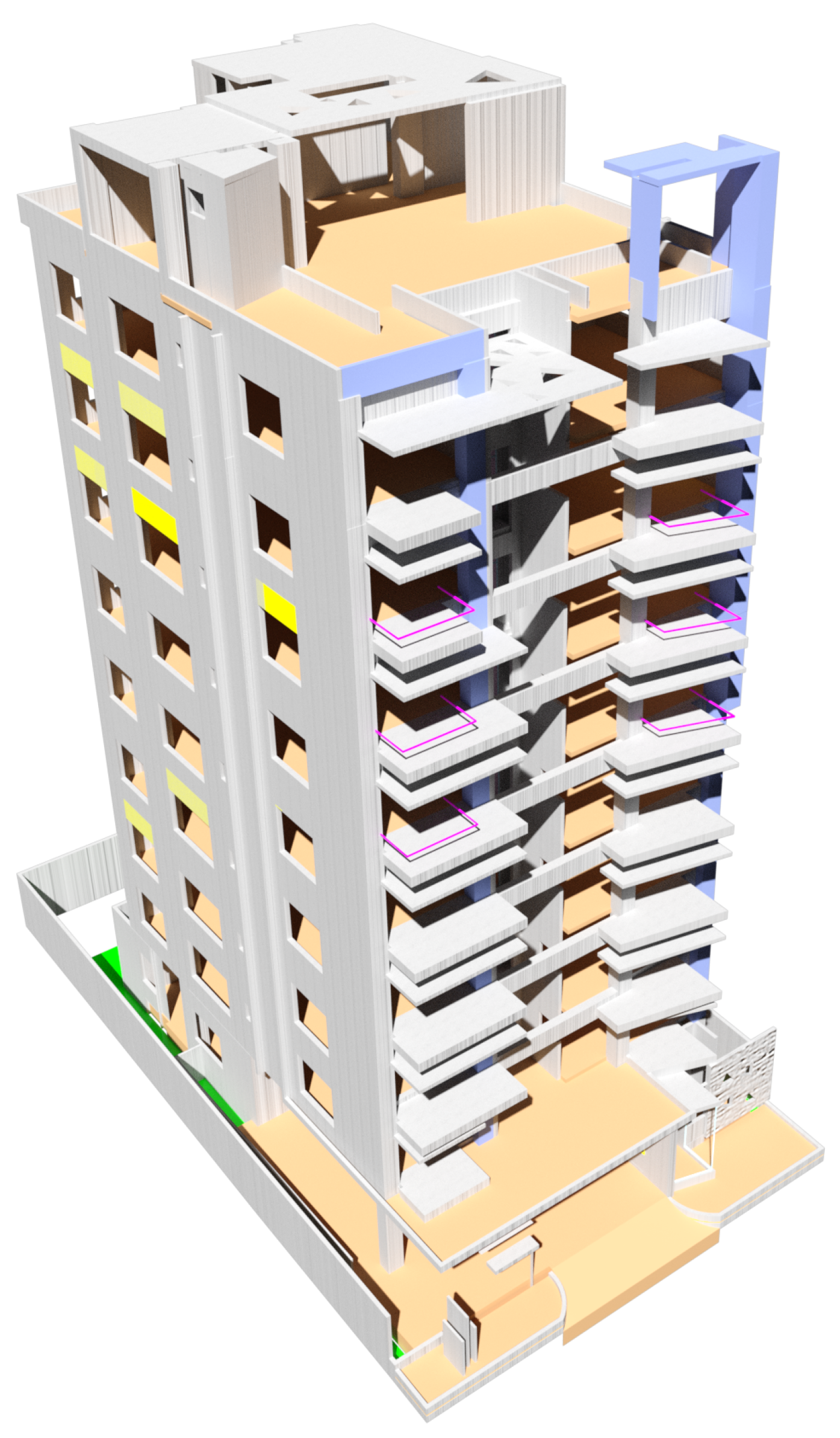
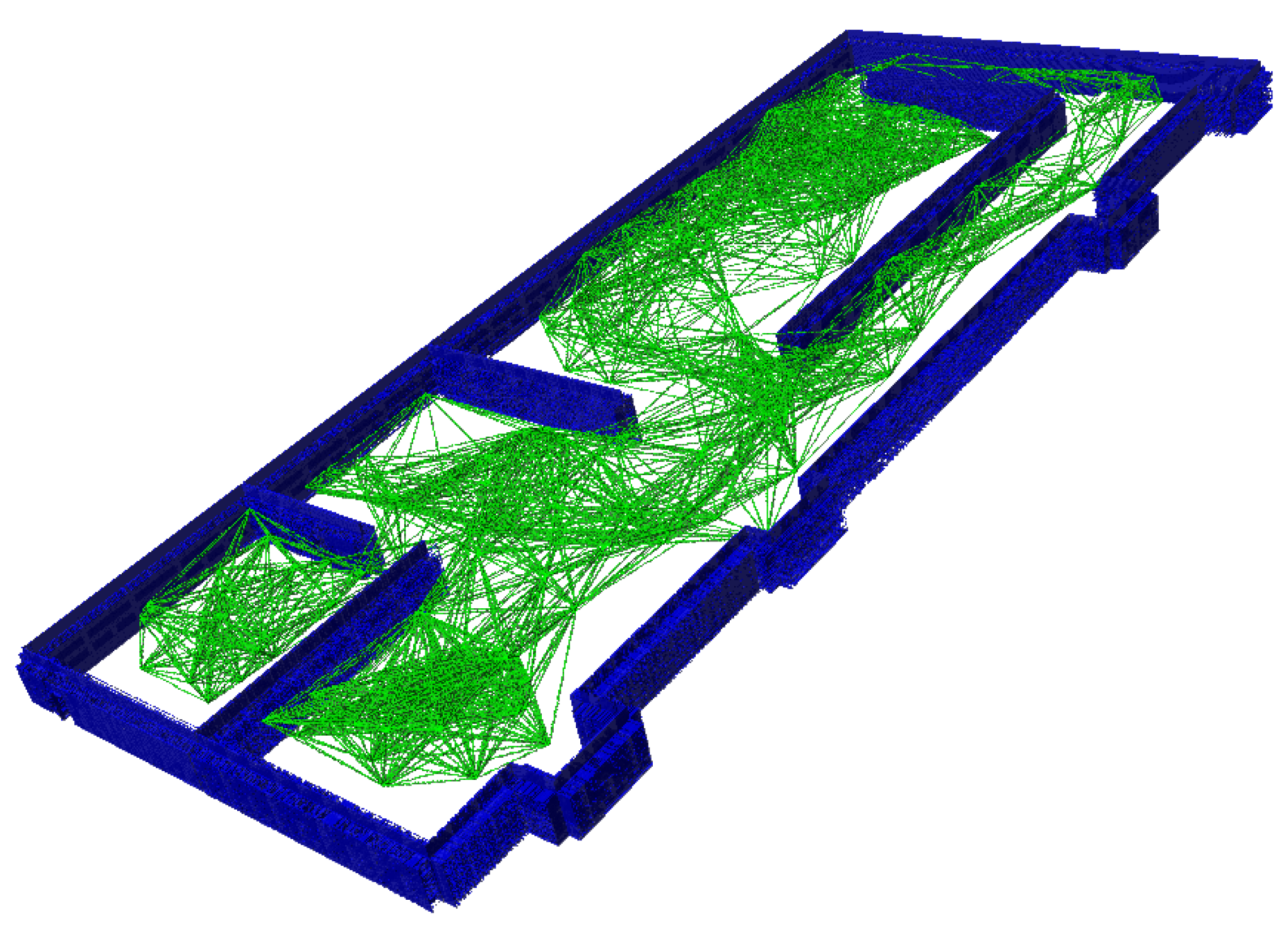
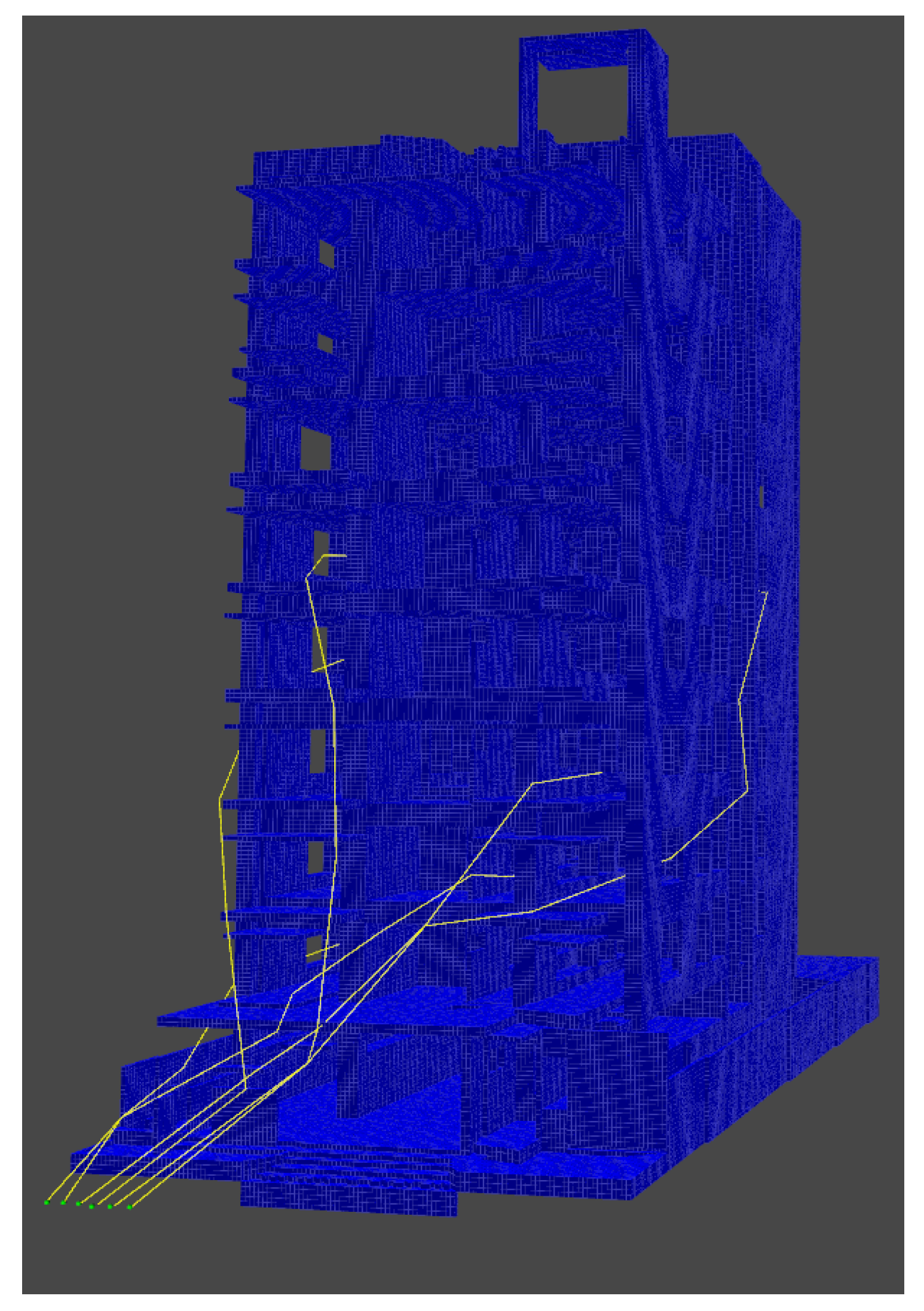
3.1. 3D Occupancy Map Generation
3.2. Exploration of the 3D Environment Based on PRM
| Algorithm 1: 3D probabilistic roadmaps. |
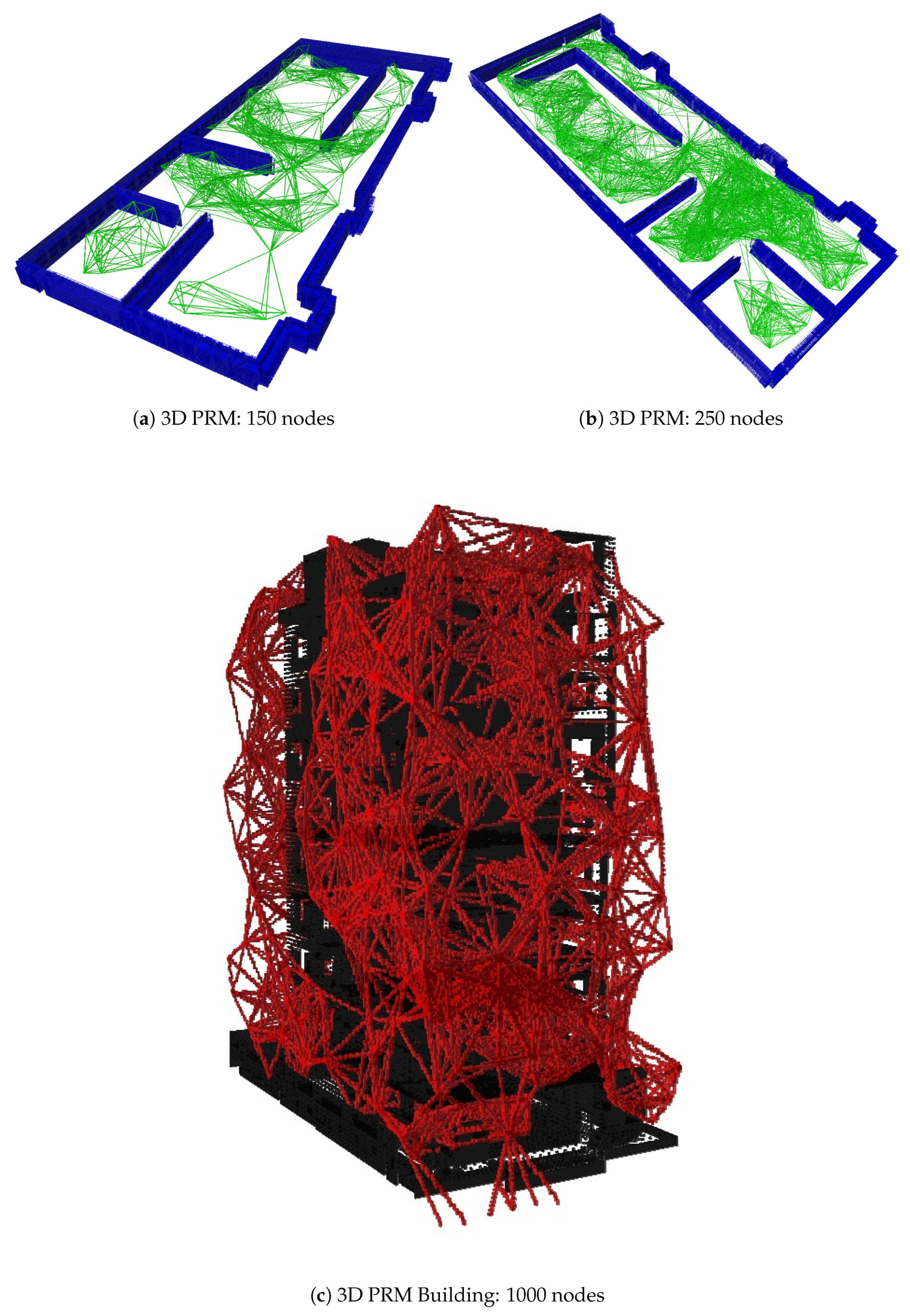
| Input: 3D Occupancy Map Output: 3D Probabilistic Roadmap (Figure 3).  |
- : A file containing the initial positions of the vehicles. In this case, these positions are established concerning (0,0,0) of Gazebo. In the real application, the conversion of the global coordinates to a local reference system is required taking into account the initial position of one of the vehicles. Knowing the position of the goals and each of the vehicles, it is possible to establish a common reference system for all agents involved in the mission.
- : A file containing the final positions of the goals to be achieved. As in the previous case, these coordinates appear in meters with respect to the coordinates of the origin simulation. As indicated, the idea is to introduce intermediate processing that is in charge of taking the position of each vehicle and the locations to reach, referencing all data to a common reference system.
- , , , , , : Sets of the maximum and minimum values of the coordinate of a node in the X, Y, and Z axes, respectively. These values are fixed taking into account the size of the Octree, and they are extracted through functions collected in the Octomap library.
- : Variable that allows parameterizing the number of nodes to explore the environment. As mentioned above, it is important to establish a balance between computing time and a high possibility of finding all possible solutions. The greater is the number of nodes, the longer is the computation time, but the greater are the chances of finding a solution and making it as short as possible. If the number of nodes is decreased, the computation time is minimized, but the possibility of finding a possible solution is reduced.
- , : To improve the creation of the PRM, these values are introduced in such a way that the generated edges are in a range of distance. That leads to eliminate the path of two very close nodes. The maximum distance is limited to increase the possibility to find a free collision path. In the case of the number of nodes, it is necessary to establish a balance between these distances and the total size of the Octree.
- Generation of nodes: Nodes are generated with random coordinate values, as shown on Lines 8–10 of Algorithm 1. To do this, it is necessary to use the variable , which corresponds to a constant of C++ that returns the maximum value of the function . Once the node is generated, the next step is to look for this node inside the Octree, and check if it corresponds to free space. If so, it is added to the set of PRM nodes.
- Edge generation: The next step is to establish all possible connections between the generated nodes. To achieve this, first the algorithm checks if the nodes are at a valid distance according to the established range, and then verifies if the line connects both nodes is free collision path. This process is carried out using the Octomap libraries, which have functions that allow throwing rays from one point to another, receiving if the ray is hitting an obstacle or not, and checking that the end of the ray is the destination and not an intermediate point. In addition, this function takes into account the direction in which the beam must be launched and its distance, thus it ensures that the path sought is between the two nodes generated. Once the check is done, the edge is saved.
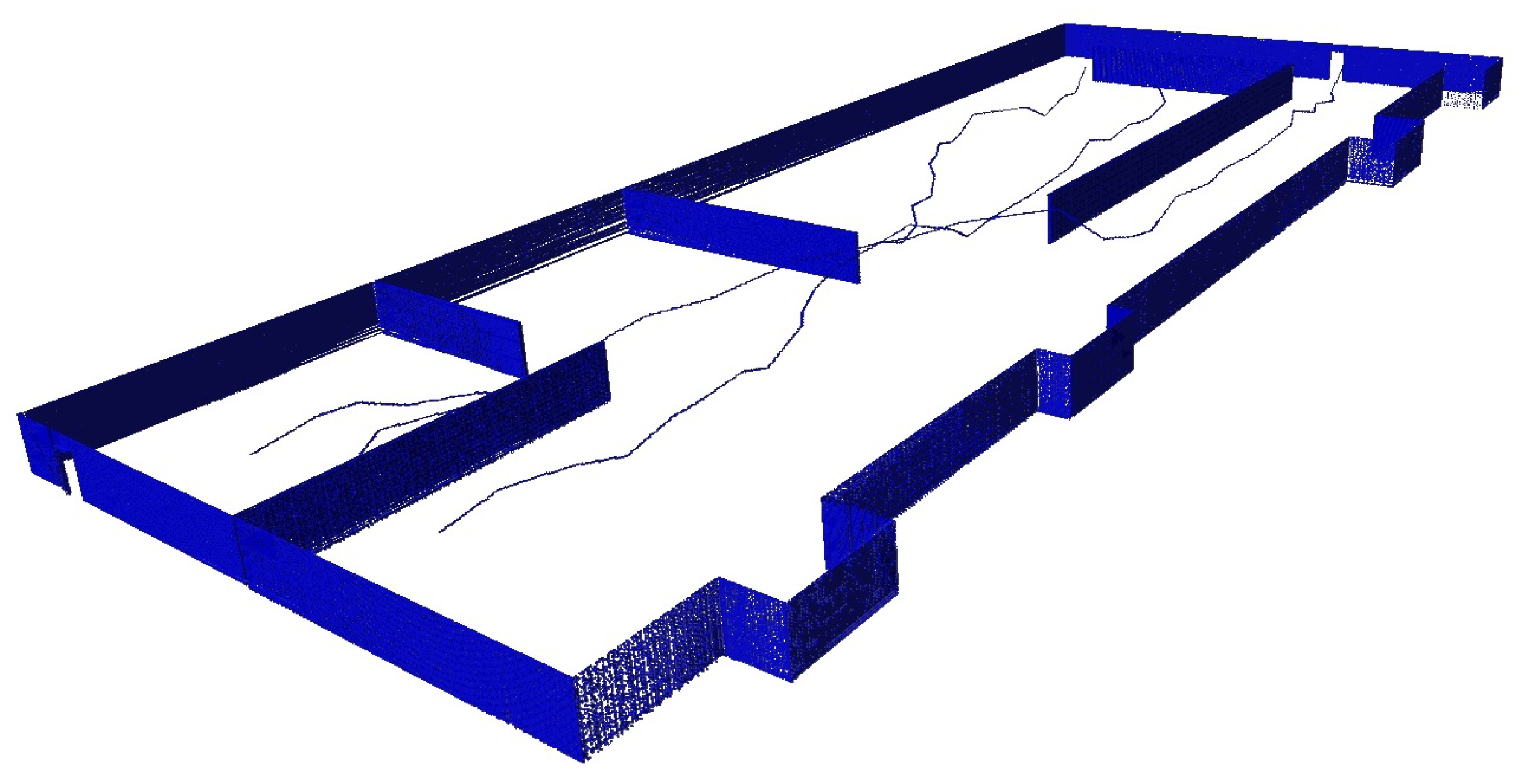
3.3. Generation of Paths
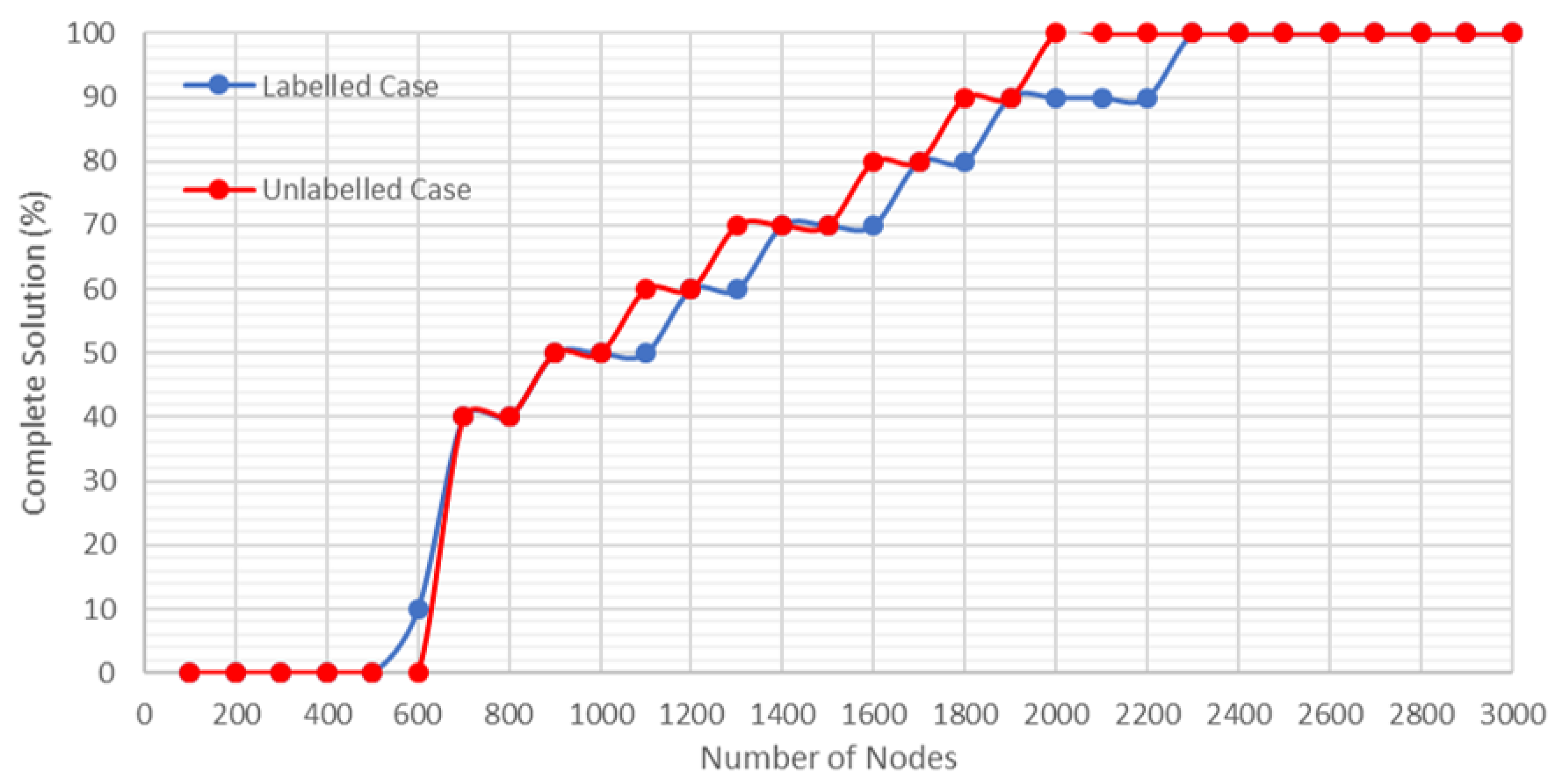
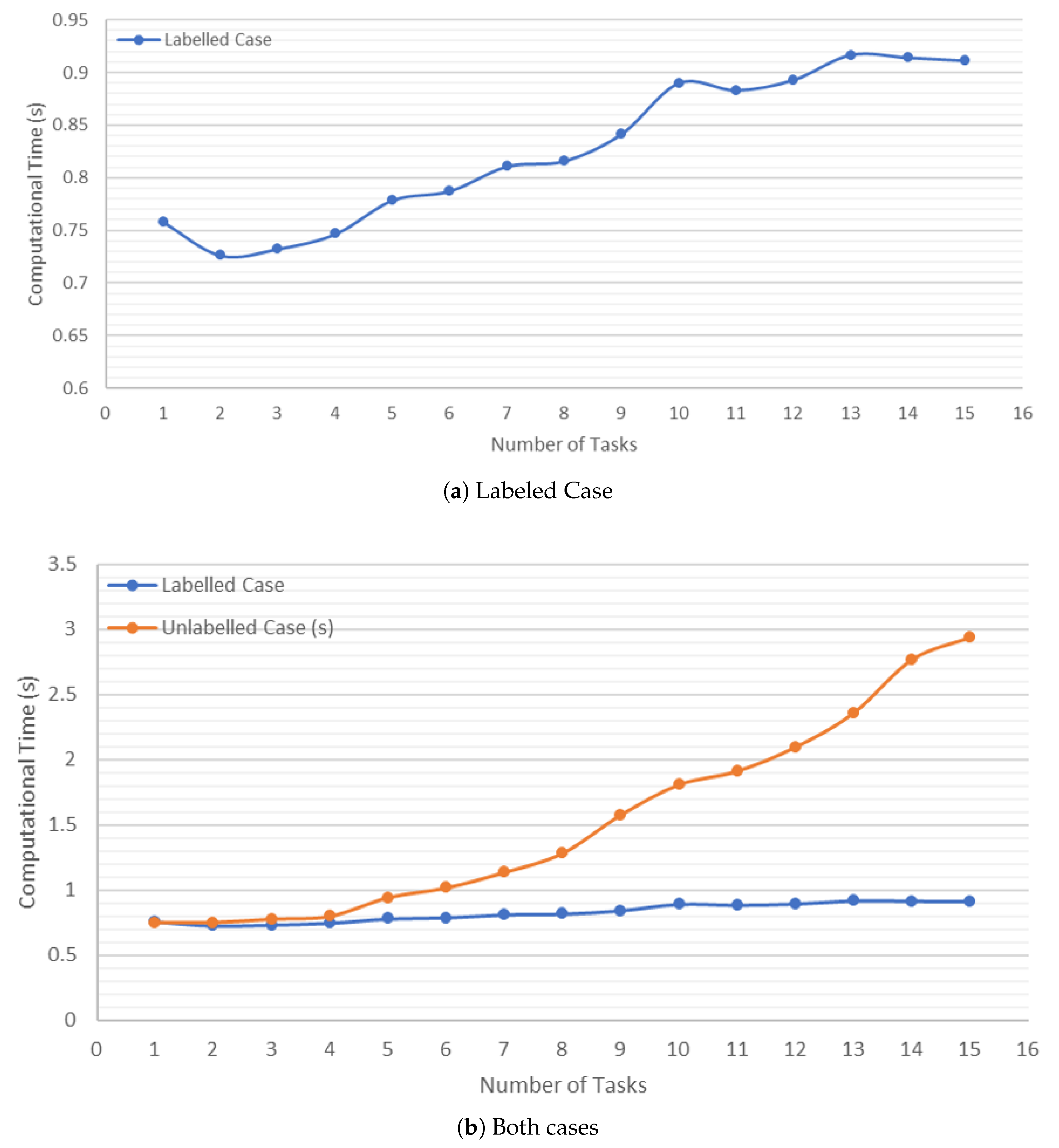
3.3.1. Generation of Paths for the Labeled Case
3.3.2. Generation of Paths for the Unlabeled Case
3.4. Collision Avoidance
| Algorithm 2: Collision avoidance between UAVs. |
 |
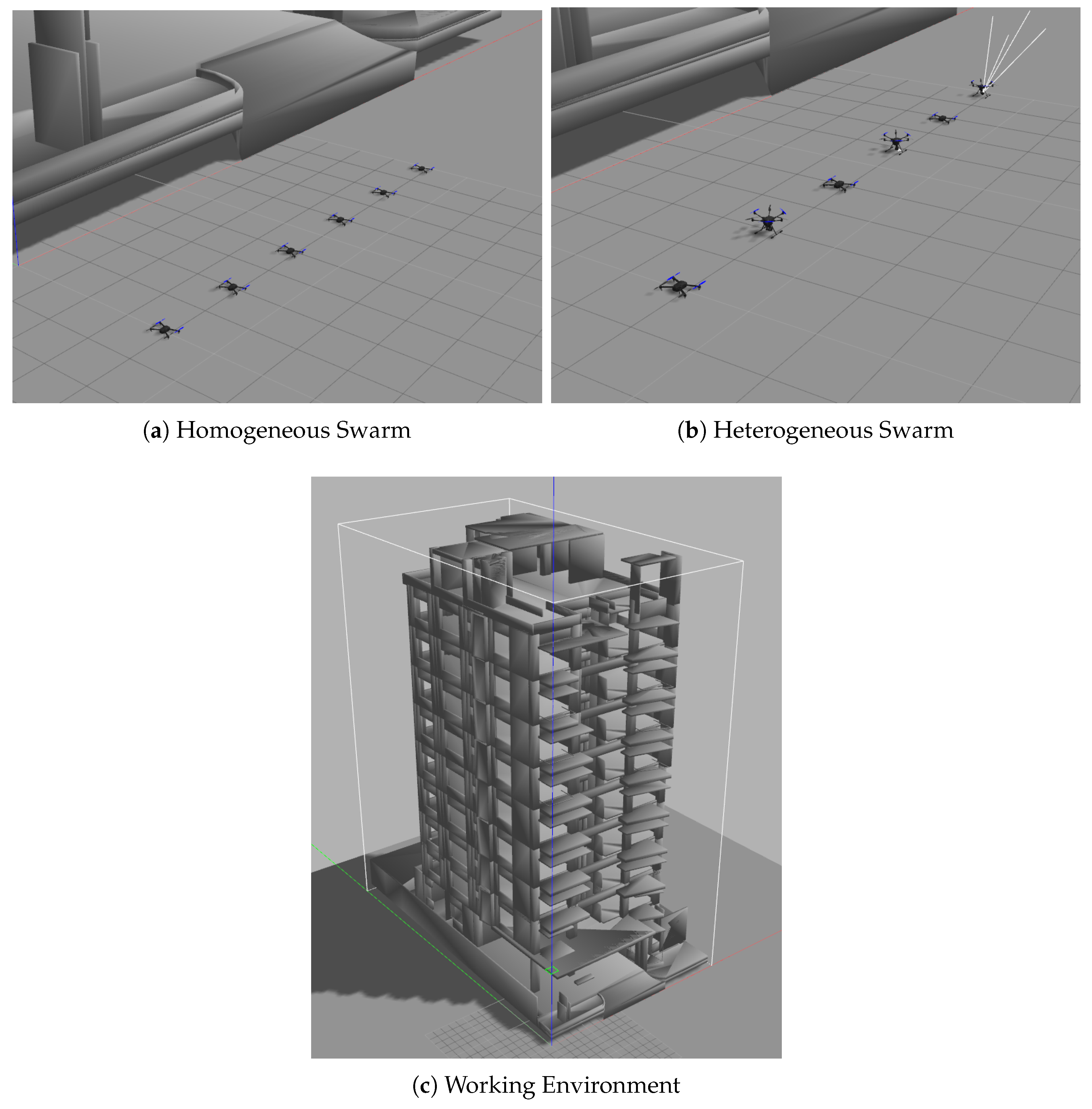
4. Simulation and Results
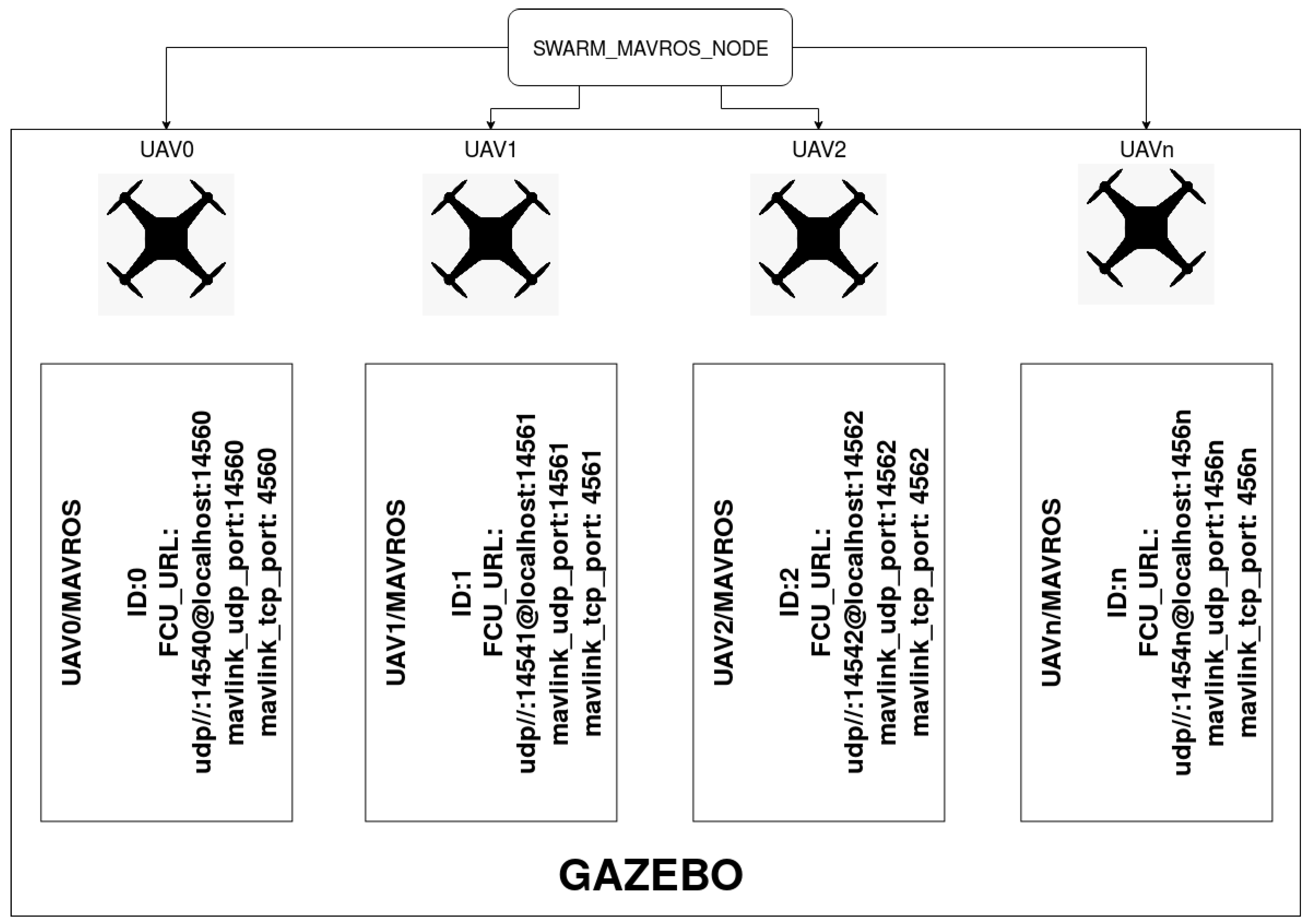
4.1. Control Architecture and Simulation
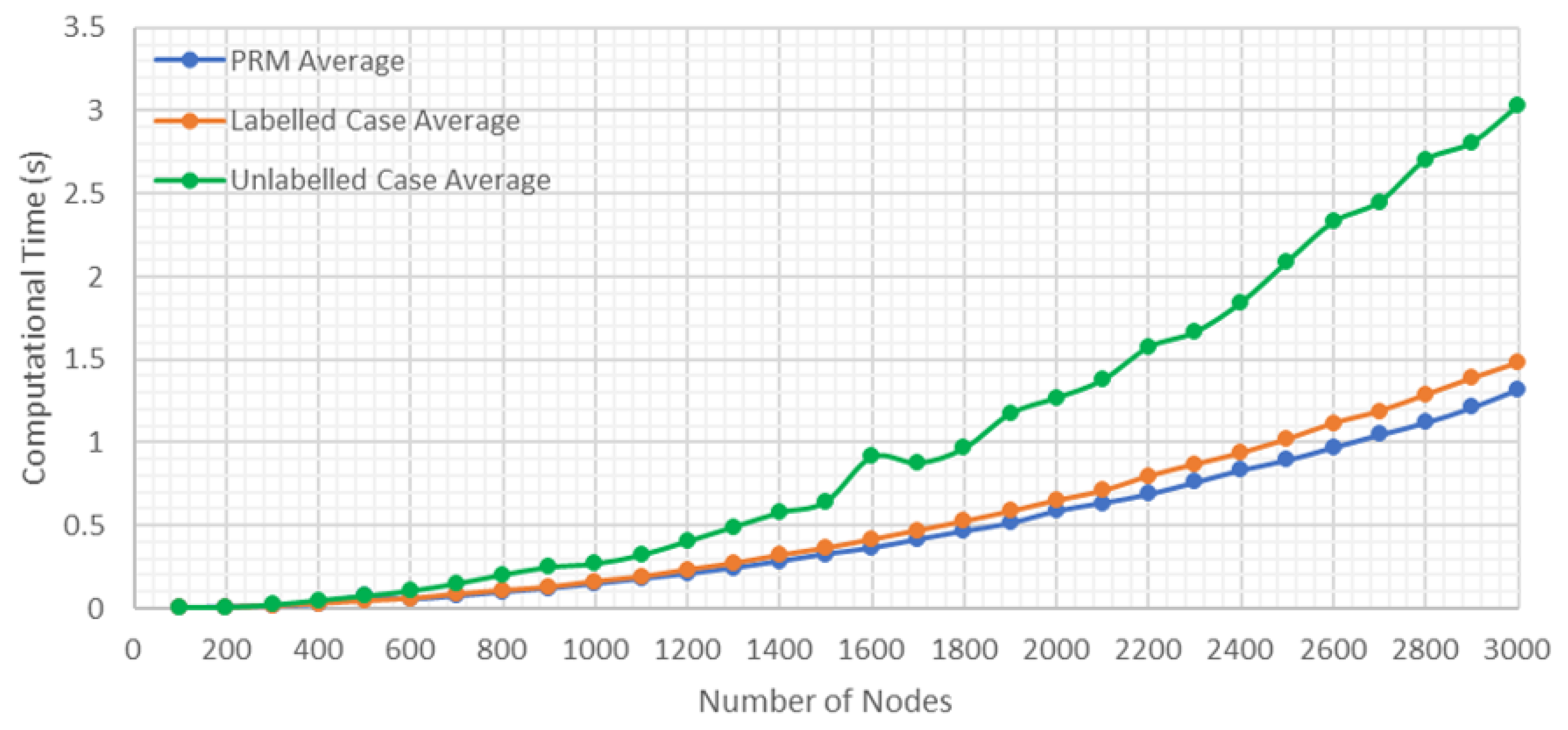
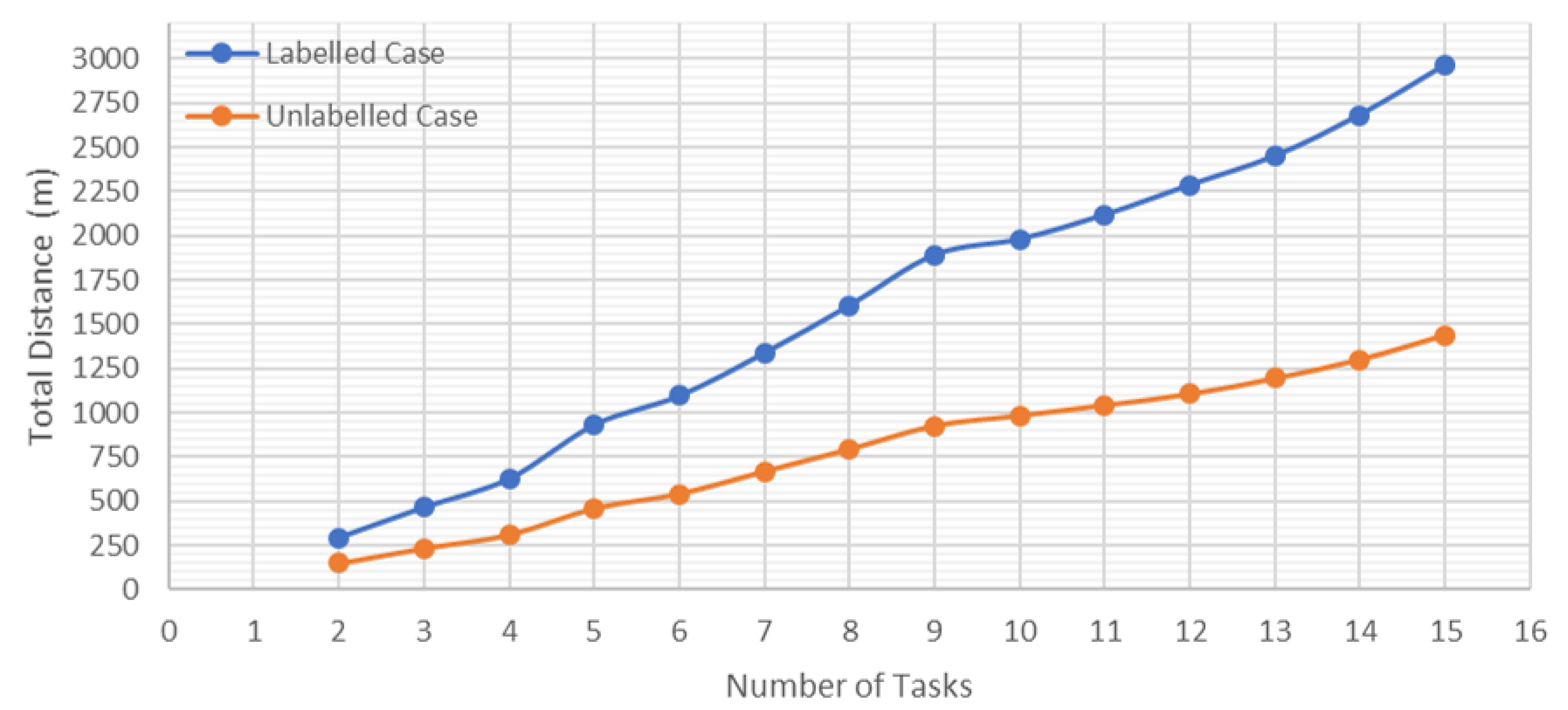
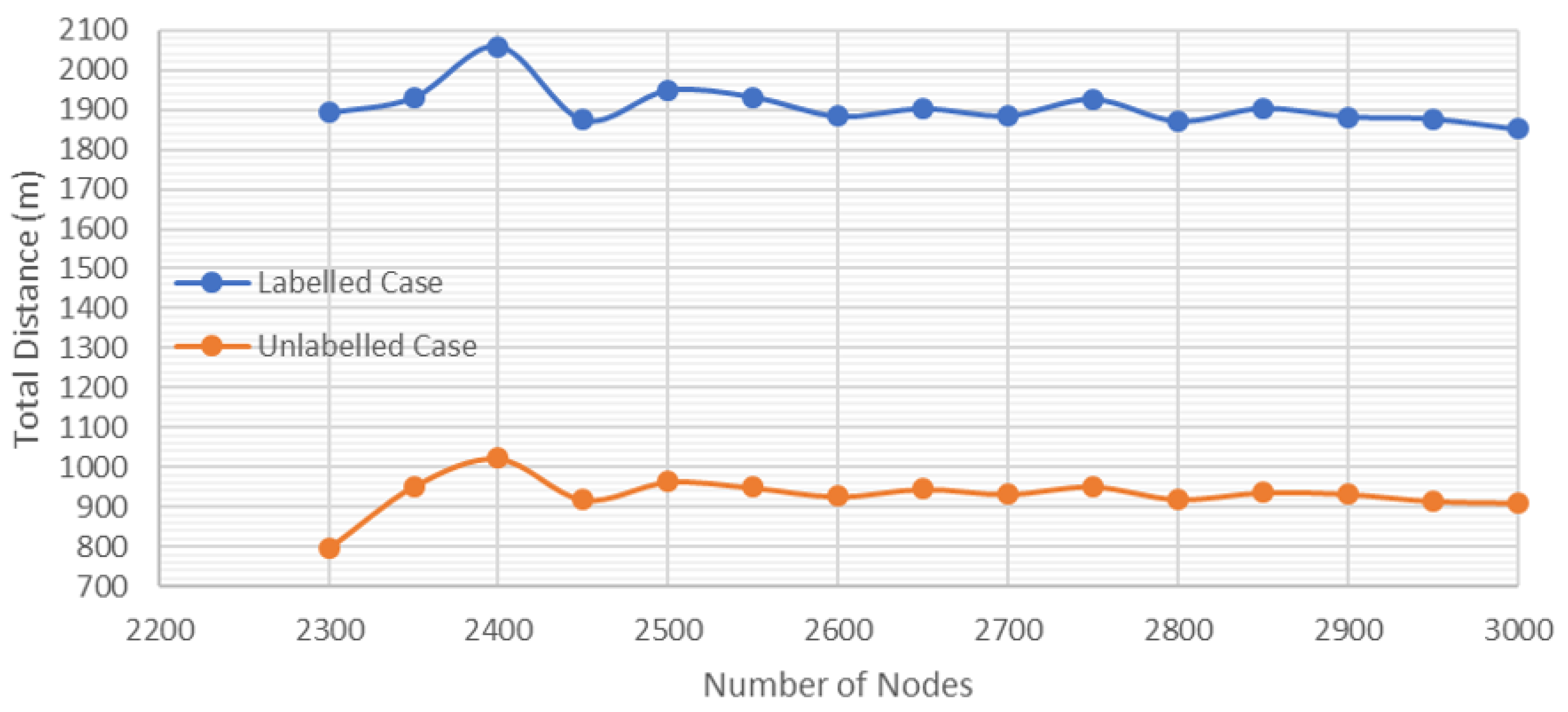
4.2. Results
- PRM Average: It is the average computational time for generating PRM without considering if it is labeled or unlabeled case.
- Labeled Case Average: It is the average computational time for generating the solution for the labeled case.
- Unlabeled Case Average: It is the average computational time for generating the solution for the unlabeled case.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Frederiksen, M.H.; Mouridsen, O.A.V.; Knudsen, M.P. Drones for Inspection of Infrastructure: Barriers, Opportunities and Successful Uses. Available online: https://findresearcher.sdu.dk:8443/ws/files/153908491/Final_Infrastructure_Memo_29.05.2019.pdf (accessed on 22 January 2020).
- Besada, J.; Bergesio, L.; Campaña, I.; Vaquero-Melchor, D.; López-Araquistain, J.; Bernardos, A.; Casar, J. Drone mission definition and implementation for automated infrastructure inspection using airborne sensors. Sensors 2018, 18, 1170. [Google Scholar] [CrossRef] [PubMed]
- Díaz, M.W.; Cáceres, J.J. A novel application of drones: thermal diagnosis of electrical and telecommunications infrastructure. In Proceedings of the IEEE 38th Central America and Panama Convention (CONCAPAN XXXVIII), San Salvador, El Salvador, 7–9 November 2018; pp. 1–6. [Google Scholar]
- Al-Kaff, A.; Moreno, F.M.; San José, L.J.; García, F.; Martín, D.; de la Escalera, A.; Nieva, A.; Garcéa, J.L.M. VBII-UAV: Vision-based infrastructure inspection-UAV. In Proceedings of the World Conference on Information Systems and Technologies, Madeira, Portugal, 11–13 April 2017; pp. 221–231. [Google Scholar]
- Long, T.; Ozger, M.; Cetinkaya, O.; Akan, O.B. Energy neutral internet of drones. IEEE Commun. Mag. 2018, 56, 22–28. [Google Scholar] [CrossRef]
- Sarkar, S.; Totaro, M.W.; Elgazzar, K. Intelligent drone-based surveillance: application to parking lot monitoring and detection. In Proceedings of the Unmanned Systems Technology XXI, Anaheim, CA, USA, 28–30 April 2019; Volume 11021, p. 1102104. [Google Scholar]
- Karaca, Y.; Cicek, M.; Tatli, O.; Sahin, A.; Pasli, S.; Beser, M.F.; Turedi, S. The potential use of unmanned aircraft systems (drones) in mountain search and rescue operations. Am. J. Emerg. Med. 2018, 36, 583–588. [Google Scholar] [CrossRef] [PubMed]
- Al-Kaff, A.; Moreno, F.M.; de la Escalera, A.; Armingol, J.M. Intelligent vehicle for search, rescue and transportation purposes. In Proceedings of the IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Shanghai, China, 11–13 October 2017; pp. 110–115. [Google Scholar]
- Quan, A.; Herrmann, C.; Soliman, H. Project Vulture: A Prototype for Using Drones in Search and Rescue Operations. In Proceedings of the International Conference on Distributed Computing in Sensor Systems (DCOSS), Santorini Island, Greece, 29–31 May 2019; pp. 619–624. [Google Scholar]
- Claesson, A.; Fredman, D.; Svensson, L.; Ringh, M.; Hollenberg, J.; Nordberg, P.; Rosenqvist, M.; Djarv, T.; Österberg, S.; Lennartsson, J.; et al. Unmanned aerial vehicles (drones) in out-of-hospital-cardiac-arrest. Scand. J. Trauma Resusc. Emerg. Med. 2016, 24, 124. [Google Scholar] [CrossRef] [PubMed]
- Murray, C.; Raj, R. The Multiple Flying Sidekicks Traveling Salesman Problem: Parcel Delivery with Multiple Drones. Transp. Res. Part C Emerg. Technol. 2019, 110, 368–398. [Google Scholar] [CrossRef]
- Goerzen, C.; Kong, Z.; Mettler, B. A survey of motion planning algorithms from the perspective of autonomous UAV guidance. J. Intell. Robot. Syst. 2010, 57, 65. [Google Scholar] [CrossRef]
- Russell, S.J.; Norvig, P. Artificial Intelligence: A Modern Approach; Pearson Education Limited: Kuala Lumpur, Malaysia, 2016. [Google Scholar]
- Yan, Z.; Jouandeau, N.; Cherif, A.A. A survey and analysis of multi-robot coordination. Int. J. Adv. Robot. Syst. 2013, 10, 399. [Google Scholar] [CrossRef]
- Madridano, Á.; Al-Kaff, A.; Gómez, D.M.; de la Escalera, A. Multi-Path Planning Method for UAVs Swarm Purposes. In Proceeding of the IEEE International Conference of Vehicular Electronics and Safety (ICVES), Cairo, Egypt, 4–6 September 2019; pp. 1–6. [Google Scholar]
- Korkmaz, M.; Durdu, A. Comparison of optimal path planning algorithms. In Proceedings of the 14th International Conference on Advanced Trends in Radioelecrtronics, Telecommunications and Computer Engineering (TCSET), Slavske, Ukraine, 20–24 February 2018; pp. 255–258. [Google Scholar] [CrossRef]
- Yang, L.; Qi, J.; Xiao, J.; Yong, X. A literature review of UAV 3D path planning. In Proceedings of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014; pp. 2376–2381. [Google Scholar]
- Dias, A.; Fernandes, T.; Almeida, J.; Martins, A.; Silva, E. 3D PATH PLANNING METHODS FOR UNMANNED AERIAL VEHICLES IN SEARCH AND RESCUE SCENARIOS. Int. J. Artif. Intell. Tools 2018, 26. [Google Scholar]
- Wang, Z.; Cai, J. Probabilistic roadmap method for path-planning in radioactive environment of nuclear facilities. Prog. Nucl. Energy 2018, 109, 113–120. [Google Scholar] [CrossRef]
- Upadhyay, A.; Shrimali, K.R.; Shukla, A. UAV-Robot Relationship for Coordination of Robots on a Collision Free Path. Procedia Comput. Sci. 2018, 133, 424–431. [Google Scholar] [CrossRef]
- Yan, F.; Liu, Y.S.; Xiao, J.Z. Path planning in complex 3D environments using a probabilistic roadmap method. Int. J. Autom. Comput. 2013, 10, 525–533. [Google Scholar] [CrossRef]
- Samaniego, F.; Sanchis, J.; García-Nieto, S.; Simarro, R. UAV motion planning and obstacle avoidance based on adaptive 3D cell decomposition: Continuous space vs. discrete space. In Proceedings of the IEEE Second Ecuador Technical Chapters Meeting (ETCM), Salinas, Ecuador, 16–20 October 2017; pp. 1–6. [Google Scholar]
- Guastella, D.C.; Cavallaro, N.D.; Melita, C.D.; Savasta, M.; Muscato, G. 3D path planning for UAV swarm missions. In Proceedings of the 2nd International Conference on Mechatronics Systems and Control Engineering, Amsterdam, The Netherlands, 21–23 February 2018; pp. 33–37. [Google Scholar]
- Falomir, E.; Chaumette, S.; Guerrini, G. A 3D Mobility Model for Autonomous Swarms of Collaborative UAVs. In Proceeding of the International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 196–204. [Google Scholar] [CrossRef]
- Capitan, J.; Mantecon, D.; Soriano, P.; Ollero, A. Autonomous perception techniques for urban and industrial fire scenarios. In Proceeding of the IEEE International Workshop on Safety, Security and Rescue Robotics, Rome, Italy, 27–29 September 2007; pp. 1–6. [Google Scholar]
- Sinha, A.; Tsourdos, A.; White, B. Multi uav coordination for tracking the dispersion of a contaminant cloud in an urban region. Eur. J. Control 2009, 15, 441–448. [Google Scholar] [CrossRef]
- Allauddin, M.S.; Kiran, G.S.; Kiran, G.R.; Srinivas, G.; Mouli, G.U.R.; Prasad, P.V. Development of a Surveillance System for Forest Fire Detection and Monitoring using Drones. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 9361–9363. [Google Scholar]
- Couceiro, M.S.; Portugal, D.; Ferreira, J.F.; Rocha, R.P. SEMFIRE: Towards a new generation of forestry maintenance multi-robot systems. In Proceedings of the 2019 IEEE/SICE International Symposium on System Integration (SII), Paris, France, 14–16 January 2019; pp. 270–276. [Google Scholar]
- Kristensen, A.S.; Mehmood, S.; Ahmed, S.; Ahsan, D.; Zamora, R. Rescue Emergency Drone (Red) network for assessment of traffic accidents in Denmark. In Proceedings of the 28th International European Safety and Reliability Conference (ESREL), Trondheim, Norway, 17–21 June 2018; pp. 1887–1892. [Google Scholar]
- Ranjan, A.; Panigrahi, B.; Rath, H.K.; Misra, P.; Simha, A.; Sahu, H. A Study on Pathloss Model for UAV Based Urban Disaster and Emergency Communication Systems. In Proceedings of the Twenty Fourth National Conference on Communications (NCC), Hyderabad, India, 25–28 February 2018; pp. 1–6. [Google Scholar]
- Rokhsaritalemi, S.; Sadeghi-Niaraki, A.; Choi, S.M. Drone Trajectory Planning Based on Geographic Information System for 3D Urban Modeling. In Proceedings of the International Conference on Information and Communication Technology Convergence (ICTC), Jeju, South Korea, 17–19 October 2018; pp. 1080–1083. [Google Scholar]
- Meier, L.; Tanskanen, P.; Fraundorfer, F.; Pollefeys, M. Pixhawk: A system for autonomous flight using onboard computer vision. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2992–2997. [Google Scholar]
- Hornung, A.; Wurm, K.M.; Bennewitz, M.; Stachniss, C.; Burgard, W. OctoMap: An Efficient Probabilistic 3D Mapping Framework Based on Octrees. Auton. Robot 2013, 34, 189–206. [Google Scholar] [CrossRef]
- Meyer, J. Hector Quadrotor ROS Package Website. Available online: http://wiki.ros.org/hector_quadrotor (accessed on 22 January 2020).
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 17 May 2009; Volume 3, p. 5. [Google Scholar]
- Nooruddin, F.S.; Turk, G. Simplification and Repair of Polygonal Models Using Volumetric Techniques. IEEE Trans. Vis. Comput. Graph. 2003, 9, 191–205. [Google Scholar] [CrossRef]
- Min, P. binvox. Available online: http://www.patrickmin.com/binvox (accessed on 22 January 2020).
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Kuhn, H.W. The Hungarian method for the assignment problem. Naval Res. Logist. Q. 1955, 2, 83–97. [Google Scholar] [CrossRef]
- Chopra, S.; Notarstefano, G.; Rice, M.; Egerstedt, M. A distributed version of the hungarian method for multirobot assignment. IEEE Trans. Robot. 2017, 33, 932–947. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Safety Margin as UAV Size (m) | T1 | T2 | T3 | T4 | T5 | T6 | T7 | T8 | T9 | T10 |
|---|---|---|---|---|---|---|---|---|---|---|
| 0.5 | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y |
| 1.0 | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y |
| 1.5 | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y |
| 2.0 | Y | Y | Y | N | Y | Y | Y | Y | Y | Y |
| 2.5 | Y | Y | Y | N | Y | Y | Y | N | Y | Y |
| 3.0 | Y | Y | N | N | Y | Y | Y | N | Y | Y |
| 3.5 | N | Y | N | N | Y | N | N | N | Y | N |
| 4.0 | N | N | N | N | Y | N | N | N | N | N |
| 4.5 | N | N | N | N | Y | N | N | N | N | N |
| 5.0 | N | N | N | N | N | N | N | N | N | N |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Madridano, Á.; Al-Kaff, A.; Martín, D.; de la Escalera, a.A. 3D Trajectory Planning Method for UAVs Swarm in Building Emergencies. Sensors 2020, 20, 642. https://doi.org/10.3390/s20030642
Madridano Á, Al-Kaff A, Martín D, de la Escalera aA. 3D Trajectory Planning Method for UAVs Swarm in Building Emergencies. Sensors. 2020; 20(3):642. https://doi.org/10.3390/s20030642
Chicago/Turabian StyleMadridano, Ángel, Abdulla Al-Kaff, David Martín, and and Arturo de la Escalera. 2020. "3D Trajectory Planning Method for UAVs Swarm in Building Emergencies" Sensors 20, no. 3: 642. https://doi.org/10.3390/s20030642
APA StyleMadridano, Á., Al-Kaff, A., Martín, D., & de la Escalera, a. A. (2020). 3D Trajectory Planning Method for UAVs Swarm in Building Emergencies. Sensors, 20(3), 642. https://doi.org/10.3390/s20030642