The Prediction of Geocentric Corrections during Communication Link Outages in PPP

 , , and
, , and
Abstract
1. Introduction
- If a communication link outage occurs between the IODE value change;
- If a communication link outage occurs during the ephemeris change.
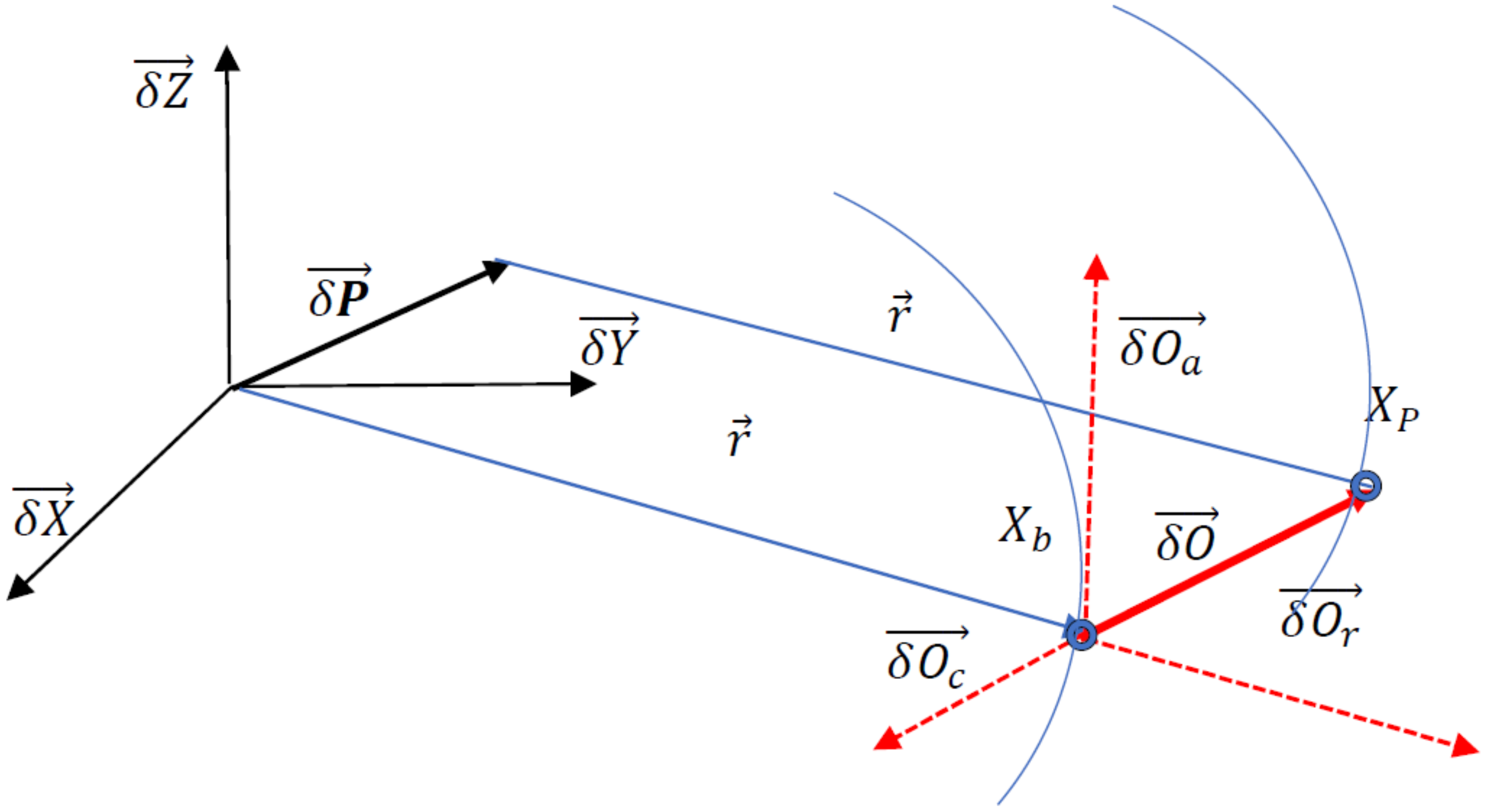
2. Satellite Orbit Corrections
3. Methods
- If the communication link outage occurs between the IODE value change;
- If the communication link outage occurs during the IODE value change.
4. Results of Geocentric Correction Prediction
4.1. Geocentric Correction Extrapolation (GPS G13): The Communication Link Outage Occurs during the Ephemeris Change
4.2. Geocentric Correction Extrapolation (GPS G28): The Communication Link Outage Occurs between the IODE Value Changes
4.3. Influence of Prediction Errors on PPP Results
- The coordinates of four satellites and one receiver were selected for a certain epoch;
- The satellite·receiver distances were calculated on the basis of their coordinates;
- A small amount of noise (max 1.5 cm) was added to all observations;
- The satellite coordinates were burdened with noise (a random walk) for 200 epochs;
- The receiver coordinates were calculated for each epoch using the minimum sum of the square satellite·receiver distance residuals as an objective function;
- The distance Di from the true coordinates to the coordinates obtained from the minimization of the objective function was calculated;
- A plot of the dxi, dyi, dzi increments of the satellite positions and Di was then created.
5. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wubbena, G.; Schmitz, M.; Bagge, A. PPP-RTK: Precise Point Positioning Using State-Space Representation in RTK Networks. In Proceedings of the ION-GNSS-2005, Institute of Navigation, Long Beach, CA, USA, 13–16 September 2005; pp. 2584–2594. [Google Scholar]
- Weber, G.; Dettmering, D.; Gebhard, H. Networked transport of RTCM via Internet Protocol (NTRIP). IAG Symp. 2005, 128, 60–64. [Google Scholar]
- Weber, G.; Mervart, L.; Lukes, Z.; Rocken, C.; Dousa, J. Real-Time Clock and Orbit Corrections for Improved Point Positioning via NTRIP. In Proceedings of the ION-GNSS-2007, Institute of Navigation, Fort Worth, TX, USA, 25–28 September 2007; pp. 1992–1998. [Google Scholar]
- Choy, S.; Bisnath, S.; Rizos, C. Uncovering common misconceptions in GNSS precise point positioning and its future prospect. GPS Solut. 2017, 21, 13–22. [Google Scholar] [CrossRef]
- Kim, M.; Park, K.-D. Development and Positioning Accuracy Assessment of Single-Frequency Precise Point Positioning Algorithms by Combining GPS Code-Pseudorange Measurements with Real-Time SSR Corrections. Sensors 2017, 17, 1347. [Google Scholar] [CrossRef]
- Krypiak-Gregorczyk, A.; Wielgosz, P.; Borkowski, A. Ionosphere Model for European Region Based on Multi-GNSS Data and TPS Interpolation. Remote Sens. 2017, 9. [Google Scholar] [CrossRef]
- Hadas, T.; Krypiak-Gregorczyk, A.; Hernández-Pajares, M.; Kaplon, J.; Paziewski, J.; Wielgosz, P.; Sierny, J. Impact and Implementation of Higher-Order Ionospheric Effects on Precise GNSS Applications. J. Geophys. Res. Solid Earth 2017, 122, 9420–9436. [Google Scholar]
- Dawidowicz, K.; Krzan, G. Analysis of PCC model dependent periodic signals in glonass position time series using lomb-scargle periodogram. Acta Geodyn. Geromater. 2016, 13, 299–315. [Google Scholar]
- Collins, P.; Gao, Y.; Lahaye, F.; He’roux, P.; MacLeod, K.; Chen, K. Accessing and Processing Real-Time GPS Corrections for Precise Point Positioning—Some User Considerations. In Proceedings of the ION-GNSS-2005, Institute of Navigation, Long Beach, CA, USA, 13–16 September 2005; pp. 1483–1491. [Google Scholar]
- Leandro, R.; Landau, H.; Nitschke, M.; Glocker, M.; Seeger, S.; Chen, X.; Deking, A.; BenTahar, M.; Zhang, F.; Ferguson, K.; et al. RTX Positioning: The Next Generation of Cm-Accurate Real-Time GNSS Positioning. In Proceedings of the ION GNSS+ 2011, Institute of Navigation, Portland, OR, USA, 20–23 September 2011; pp. 1460–1475. [Google Scholar]
- Li, Y.; Gao, Y. Navigation Performance Using Long-Term Ephemeris Extension for Mobile Device. In Proceedings of the ION GNSS 2012, Nashville, TN, USA, 16–20 September 2013; pp. 1642–1651. [Google Scholar]
- Bisnath, S.; Gao, Y. Current State of Precise Point Positioning and Future Prospect and Limitations. In International Association of Geodesy Symposia: Observing Our Changing Earth; Springer: Berlin, Germany, 2009; Volume 133, pp. 615–623. [Google Scholar]
- Álvaro, M.; Calle, J.D.; Navarro, P.; Piriz, R.; Rodriguez, D.; Tobias, G. Demonstrating in-the-Field Real-Time Precise Positioning. In Proceedings of the ION GNSS+ 2012, Institute of Navigation, Nashville, TN, USA, 17–21 September 2012; pp. 3066–3076. [Google Scholar]
- Hadas, T.; Bosy, J. IGS-RTS Precise Orbits and Clocks Verification and Quality Degradation over Time. GPS Solut. 2015, 19, 93–105. [Google Scholar]
- Janicka, J.; Tomaszewski, D.; Rapinski, J. Extrapolation of Geocentric Corrections during Loss of Communication Link—Analysis of Different Methods. In Proceedings of the 25th Saint Petersburg International Conference on Integrated Navigation Systems, St. Petersburg, Russia, 28–30 May 2018. [Google Scholar]
- Gao, Y.; Zhang, W.; Li, Y. A New Method for Real-Time PPP Correction Updates. In Proceedings of the International Symposium on Earth and Environmental Sciences for Future Generations, Prague, Czech Republic, 22 June–2 July 2015. [Google Scholar]
- Gao, Y.; Zhang, W.; Li, Y. Methods and Systems for Performing Global Navigation Satellite System (GNSS) Orbit and Clock Augmentation and Position Determination. U.S. Patent US20160370467A1, 17 June 2016. [Google Scholar]
- Radio Technical Commision for Maritime Services. Differential GNSS (Global Navigation Satellite Systems) Services—Version 3; Standard RTCM 10403.2; RTCM: Arlington, VA, USA, 2013. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Linear 65 Maximum Data-Stream | Polynomial 65 Maximum Data-Stream | Linear 15 Minimum Data-Stream | Polynomial 15 Minimum Data-Stream | Constant Value | |
|---|---|---|---|---|---|
| RMSδX [m] | 0.006 | 0.016 | 0.017 | 0.02 | 0.008 |
| RMSδY [m] | 0.184 | 0.143 | 0.127 | 0.118 | 0.114 |
| RMSδZ [m] | 0.079 | 0.108 | 0.093 | 0.092 | 0.102 |
| Linear 50 Maximum Data-Stream | Polynomial 50 Maximum Data-Stream | Linear 15 Minimum Data-Stream | Polynomial 15 Minimum Data-Stream | Constant Value | |
|---|---|---|---|---|---|
| RMSδX [m] | 0.007 | 0.002 | 0.002 | 0.002 | 0.013 |
| RMSδY [m] | 0.031 | 0.022 | 0.012 | 0.004 | 0.019 |
| RMSδZ [m] | 0.019 | 0.011 | 0.001 | 0.001 | 0.019 |
| Linear Maximum Data-Stream | Polynomial Maximum Data-Stream | Linear 15 Minimum Data-Stream | Polynomial 15 Minimum Data-Stream | Constant Value | |
|---|---|---|---|---|---|
| RMSδX [m] | 0.166 | 0.418 | 0.348 | 0.338 | 0.342 |
| RMSδY [m] | 0.074 | 0.126 | 0.102 | 0.091 | 0.1 |
| RMSδZ [m] | 0.243 | 0.118 | 0.141 | 0.149 | 0.142 |
| Linear Maximum Data-Stream | Polynomial Maximum Data-Stream | Linear 15 Minimum Data-Stream | Polynomial 15 Minimum Data-Stream | Constant Value | |
|---|---|---|---|---|---|
| RMSδX [m] | 0.211 | 0.035 | 0.019 | 0.004 | 0 |
| RMSδY [m] | 0.138 | 0.005 | 0.018 | 0.003 | 0 |
| RMSδZ [m] | 0.078 | 0.019 | 0.016 | 0.004 | 0.001 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Janicka, J.; Tomaszewski, D.; Rapinski, J.; Jagoda, M.; Rutkowska, M. The Prediction of Geocentric Corrections during Communication Link Outages in PPP. Sensors 2020, 20, 602. https://doi.org/10.3390/s20030602
Janicka J, Tomaszewski D, Rapinski J, Jagoda M, Rutkowska M. The Prediction of Geocentric Corrections during Communication Link Outages in PPP. Sensors. 2020; 20(3):602. https://doi.org/10.3390/s20030602
Chicago/Turabian StyleJanicka, Joanna, Dariusz Tomaszewski, Jacek Rapinski, Marcin Jagoda, and Miloslawa Rutkowska. 2020. "The Prediction of Geocentric Corrections during Communication Link Outages in PPP" Sensors 20, no. 3: 602. https://doi.org/10.3390/s20030602
APA StyleJanicka, J., Tomaszewski, D., Rapinski, J., Jagoda, M., & Rutkowska, M. (2020). The Prediction of Geocentric Corrections during Communication Link Outages in PPP. Sensors, 20(3), 602. https://doi.org/10.3390/s20030602