In the present section, both phase and code observation weight proportions of all Multi-GNSS baselines are discussed separately at first. Afterwards, the positioning performance of HVCE posterior weighting method is evaluated for all baselines. Finally, based on the stability of the weight proportion of both phase and code observations, the effectiveness of FVUW Multi-GNSS strategy in positioning is assessed.
4.1. Weight Proportions of Multi-GNSS Phase and Code Observations
As mentioned in
Section 2, the variance of unit weight generated from the HVCE posterior weighting strategy is a criterion to evaluate the quality of different observation types from various GNSSs. The variances of unit weight in a time series of baseline SUT obtained by HVCE Multi-GNSS are shown as an example in
Figure 3, where the variances of unit weights of both phase and code jump around a certain value are indicated from epoch to epoch, and the relationship among the variances of unit weight of different GNSSs is stable within a day. Hence in this section, the daily average variances of unit weight obtained by HVCE Multi-GNSS strategy are analyzed in detail to assess the weight proportion of phase and code separately.
Since phase observations play a more significant role in achieving high accuracy positioning, the weight proportion of phase observations has to be treated carefully.
Figure 4 presents the time series of daily averaged phase variance of unit weight for the whole 30 days. Note that the GPS phase variances of unit weight
are not shown because its value is 1.0, by definition in Equation (12).
It can be seen that all phase variances of unit weights of BDS, GLONASS and Galileo are higher than 1.0 and lower than 2.5 with a rather similar pattern. However, the result differs from baseline to baseline. The phase weight proportions in baselines DAE, GOD, STR and SUT present a more stable feature than the other two baselines. In baselines DAE and SUT, the variances of unit weight and are close to each other and higher than , while the difference between , and is not obvious in baselines GOD and STR. For baselines CHP and TLS, the phase weight proportion fluctuates over time, and is slightly higher than and in CHP, while the phase variances of unit weight are similar in TLS.
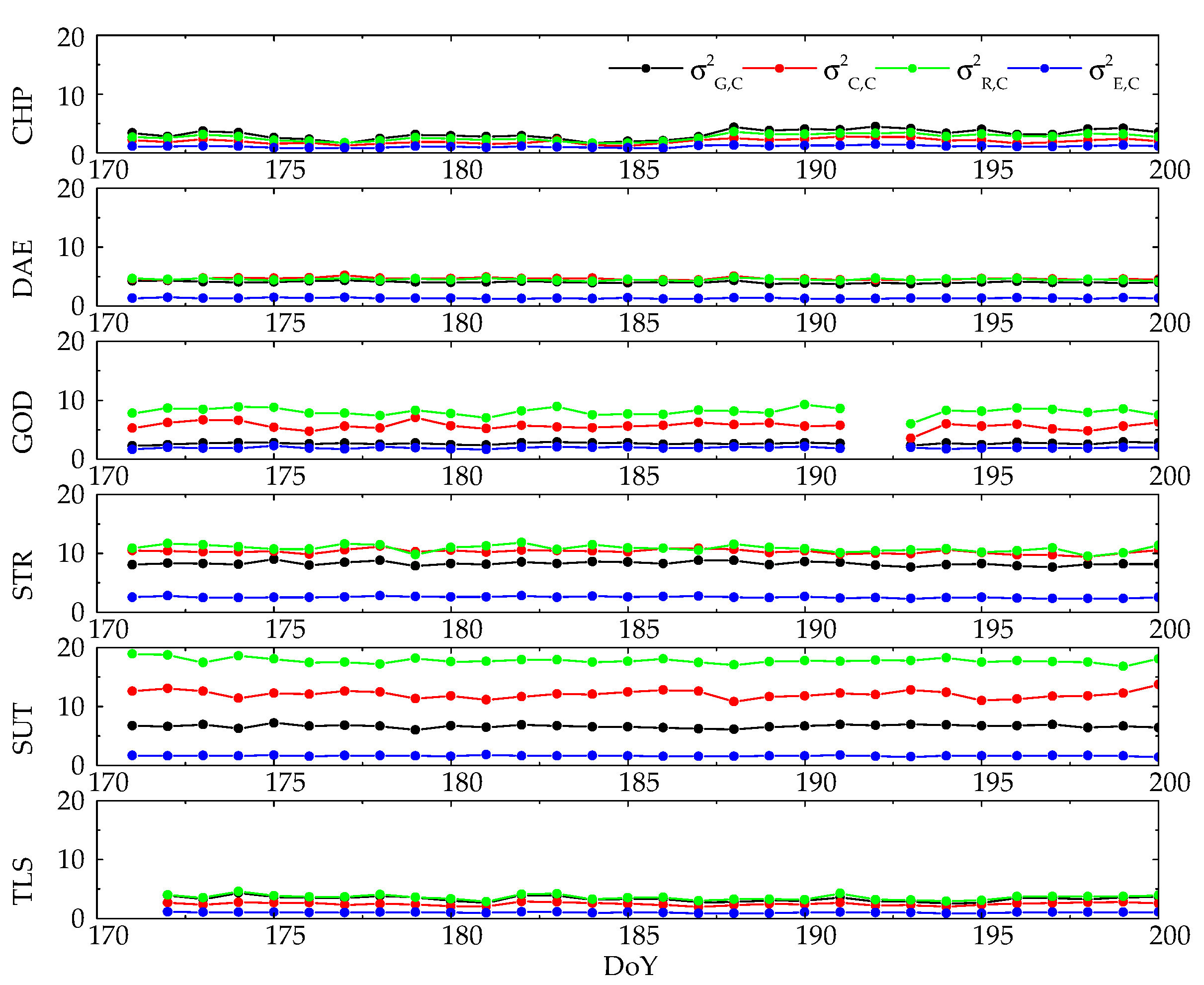
On the contrary, the discrepancy of code weight proportion between different baselines is quite evident. In this part, the GPS code unit weight
is estimated because the GPS phase unit weight
is set as the reference. It should be noted that the initial noise ratio between GPS phase and code is
, as mentioned in
Section 2.
Figure 5 depicts differences of code variance of unit weight for GPS, BDS, GLONASS and Galileo are obvious in all baselines. It is found that
in the test of GOD, STR and SUT, and the code variances of unit weight ranging from 2.5 to 11.0 in baseline GOD and STR, while
reaches 17.8 in SUT. In baseline DAE, the
,
and
are similar to each other, while the
is the smallest one. The relationships
and
are found in CHP and TLS.
As the variances of unit weight for both phase and code observations present such consistency from day to day, we averaged their values for the entire 30 days period for all baselines; see
Table 4. The RMS values of all variances of unit weight over 30 days for all baselines are also shown as their superscripts in
Table 4, which is 0.3–0.5 of the corresponding
value. From the last row of
Table 4, it is confirmed that the weight proportion of phase is almost equal among GPS, BDS, GLONASS and Galileo, as their average variances of unit weight are nearly 1.0 in all baselines. Generally, the variances of unit weight of
,
and
are higher than 1.4 in baseline CHP, DAE, GOD and TLS, which means that the phase observations of GPS present a smaller variance than other three GNSSs in these baselines. On the other hand, phase observations from different GNSSs express a more coincident variance in baseline STR and SUT, as their phase variances of unit weight are closer to 1.0.
From the right panel in
Table 4, the average code variances of unit weight present a higher variability than phase variances of unit weight. From the view of GNSS constellations, the average code variance of unit weight of Galileo
is 1.59, which is the lowest value in comparison with the other three GNSSs and indicates the outstanding performance of Galileo code observations. However, the relationship of the code variances of unit weights among GPS, BDS and GLONASS differs between baselines, as discussed in the previous paragraph, and the average values of these three GNSSs are higher than 4.5 with the sequence of
.
4.2. Accuracy of HVCE Posterior Weighting-Based Multi-GNSS Positioning
The positioning accuracy is a critical factor to evaluating the performance of HVCE Multi-GNSS strategy [
24,
30]; hence, statistical positioning results of the first four strategies are presented in this section. The relative positioning was implemented in the kinematic mode for all baseline campaigns and reset at midnight, and the final RMS was calculated for the entire 30 days. The positioning errors in time series of baseline SUT obtained by four strategies over 3 days are shown as an example in
Figure 6.
As mentioned in the introduction, Multi-GNSS can be beneficial to positioning accuracy compared with single-GNSS [
3,
4,
5,
6]. The RMSs of the four strategies with respect to each baseline over 30 days are shown in
Figure 7, and it is obvious that the RMSs obtained by Multi-GNSS strategies are lower than by GPS-only strategies in all baselines.
Table 5 presents the accuracy improvement percentages obtained by ED and HVCE Multi-GNSS strategies compared with the corresponding GPS-only strategies for all baselines. The improvement obtained by the Multi-GNSS strategy differs between baselines, but is more than 20% in every baseline. Generally, the Multi-GNSS achieves more than 30% improvement in each component in the ED method, and more than 40% in the HVCE method, compared with the corresponding GPS-only strategy.
Since the HVCE method was applied in both GPS-only and Multi-GNSS positioning, positioning improvements obtained by HVCE method were calculated, compared with the corresponding ED methods; see
Table 6. In GPS-only strategy, HVCE method improves the positioning ENU accuracy by 7.4%, 6.1% and 5.9%. Meanwhile, HVCE improves the positioning ENU accuracy of Multi-GNSS strategy over GPS-only, with the improvements of 20.5%, 15.6% and 12.3%.
4.3. Frozen Variance of Unit Weight-Based Multi-GNSS Positioning
The previous section showed that the HVCE method improved the accuracy of Multi-GNSS positioning. However, the implementation of the HVCE method requires a heavy computational load [
23]. We have calculated the computational costs of the aforementioned different positioning strategies, averaging the time consumption at adjustment process per epoch in
Table 7. It is clear that GPS-only is the most time-saving strategy, because it only uses observations of common satellites one time. In contrast, the HVCE Multi-GNSS presents the highest computational cost, more than eight times that of the ED Multi-GNSS method.
To reduce the time consumption of the HVCE Multi-GNSS method, the previously obtained variances of unit weight over 30 days in
Table 4 were averaged and then frozen as a priori information in the positioning experiment, the aforementioned FVUW strategy. As no additional variances of unit weight needed to be estimated, the time consumption of the FVUW Multi-GNSS method was compared to the ED Multi-GNSS method; see
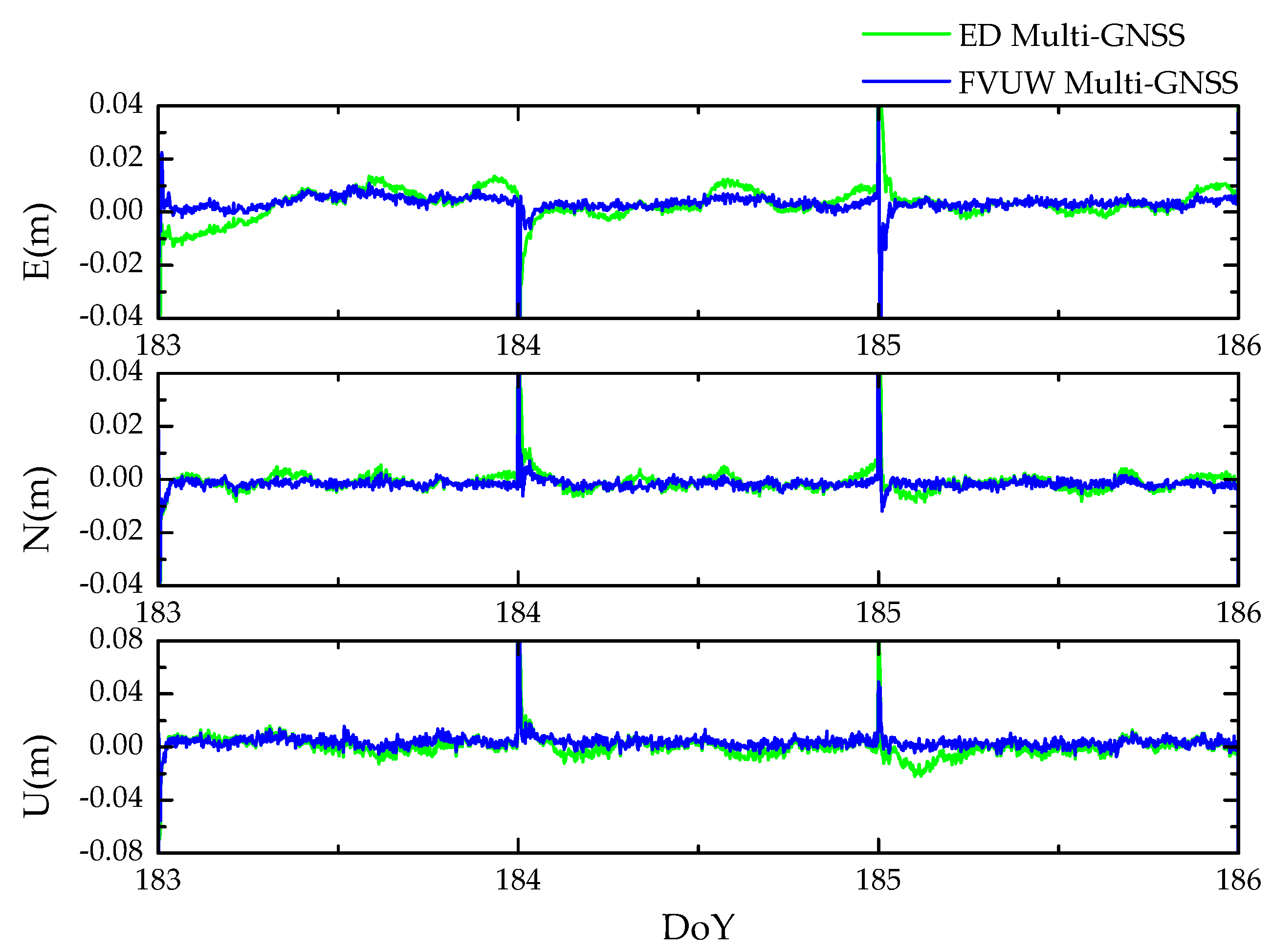
Table 7. Indeed, compared to the HVCE Multi-GNSS method, the FVUW Multi-GNSS method saves 88% time on the adjustment process. The positioning performance of the FWUV Multi-GNSS method is presented in the following, and time series of positioning errors for SUT are depicted in
Figure 8 as examples.
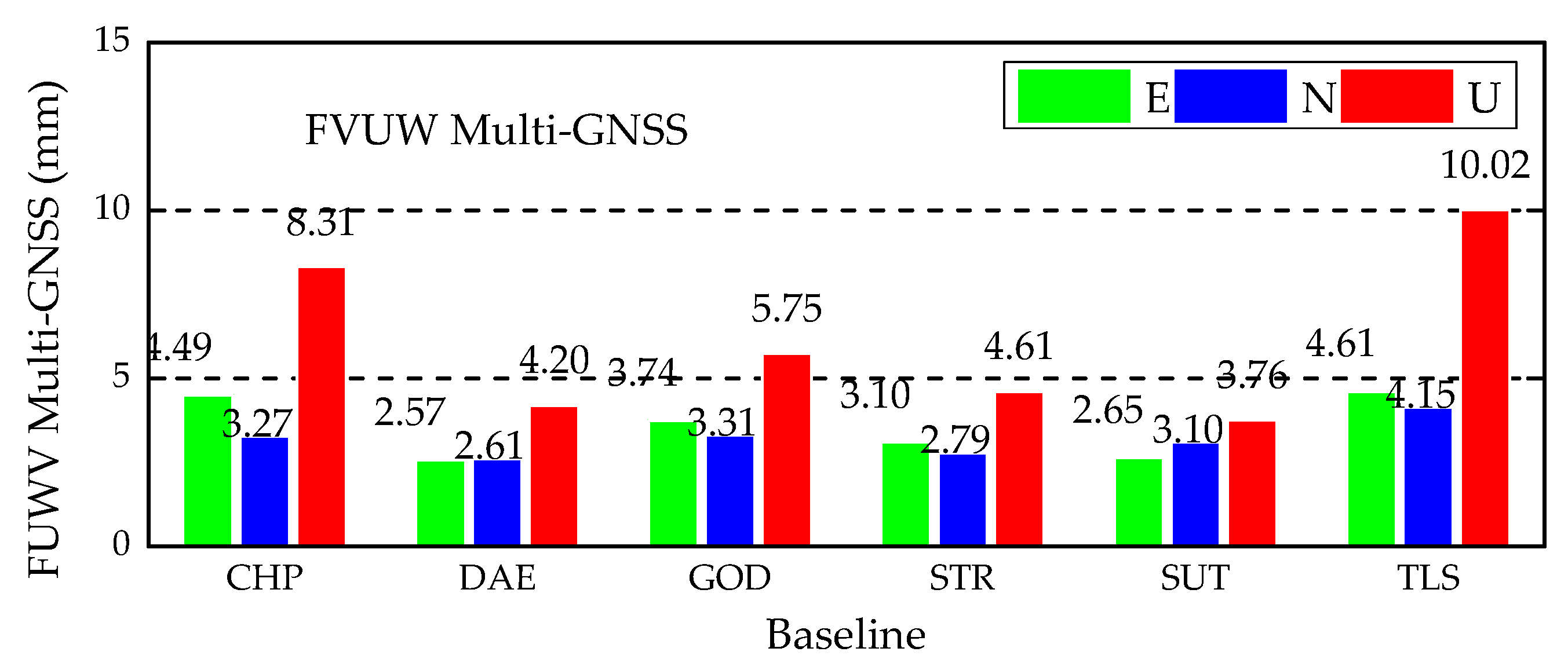
The Multi-GNSS positioning RMSs of FVUW Multi-GNSS from DoY 171 to 200 in 2019 are shown in
Figure 9, and are lower than the RMSs of ED Multi-GNSS shown in the third panel of
Figure 7. Moreover,
Table 8 shows that the Multi-GNSS positioning accuracy is improved by FVUW method with regard to ED method. Referring to
Table 8, the improvement obtained by FVUW Multi-GNSS is comparable to the HVCE Multi-GNSS, as the differences between the improvement percentages of the two strategies are lower than 3% for the most of baselines. The average improved percentages of all baselines are presented in the right-most column of
Table 8. Generally, the improvement obtained by FVUW method is 1% lower than HVCE, but it still improves the HVCE accuracy by more than 10%, compared with ED Multi-GNSS.
Finally, we assessed the effectiveness of the computed frozen variances of unit weight by extending the positioning experiment for the next 30 days, from DoY 201 to 230 in 2019. The RMSs of the Multi-GNSS positioning with ED and FVUW are presented in
Figure 10. The RMS values obtained by the FVUW method are lower than those obtained by the ED method in all baselines.
The average improved percentages of all baselines are presented in the right most column of
Table 9, yielding comparable results to those of
Table 8. At the bright side of this result, we can conclude that the positioning accuracies achieved by FVUW Multi-GNSS in the experiment extended by 30 days are as high as the improvements in the first 30 days. Specifically, the FVUW Multi-GNSS improved the positioning accuracy by more than 10% in all components, compared with ED Multi-GNSS.

 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}