Fault Detection and Exclusion for Tightly Coupled GNSS/INS System Considering Fault in State Prediction


Abstract
1. Introduction
2. Tightly Coupled GNSS/INS Integration
2.1. Tightly Coupled GNSS/INS Integration Model
2.2. Error Analysis of Tight Integration Model
2.3. Fault Analysis of Tight Integration Model
3. FG-AIME: A Novel Fault Detection Scheme with Two Detectors
3.1. Fault Detection Based on AIME
3.2. Enhanced AIME Scheme Based on Fault Grouping
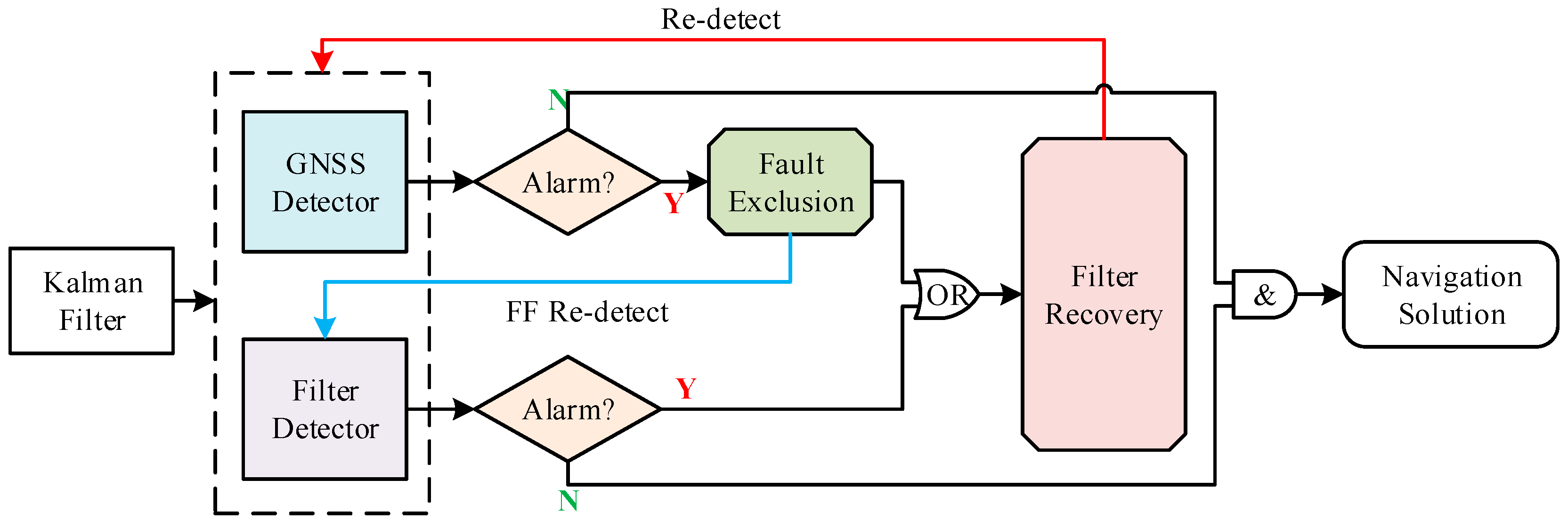
4. Fault Exclusion with Two Steps: GNSS Fault Exclusion and Filter Recovery
4.1. Complete Fault Detection and Exclusion Scheme
4.2. GNSS Fault Exclusion: Statistics and Decision Strategy
4.2.1. Alternative Hypotheses and Statistics for GNSS Fault Exclusion
4.2.2. Decision Strategy for GNSS Fault Exclusion
- All the satellites labeled as faulty in subset are labeled as faulty in subset ;
- The difference of the statistics between subset and subset is smaller than the corresponding threshold . The determination of and is given in Appendix B.
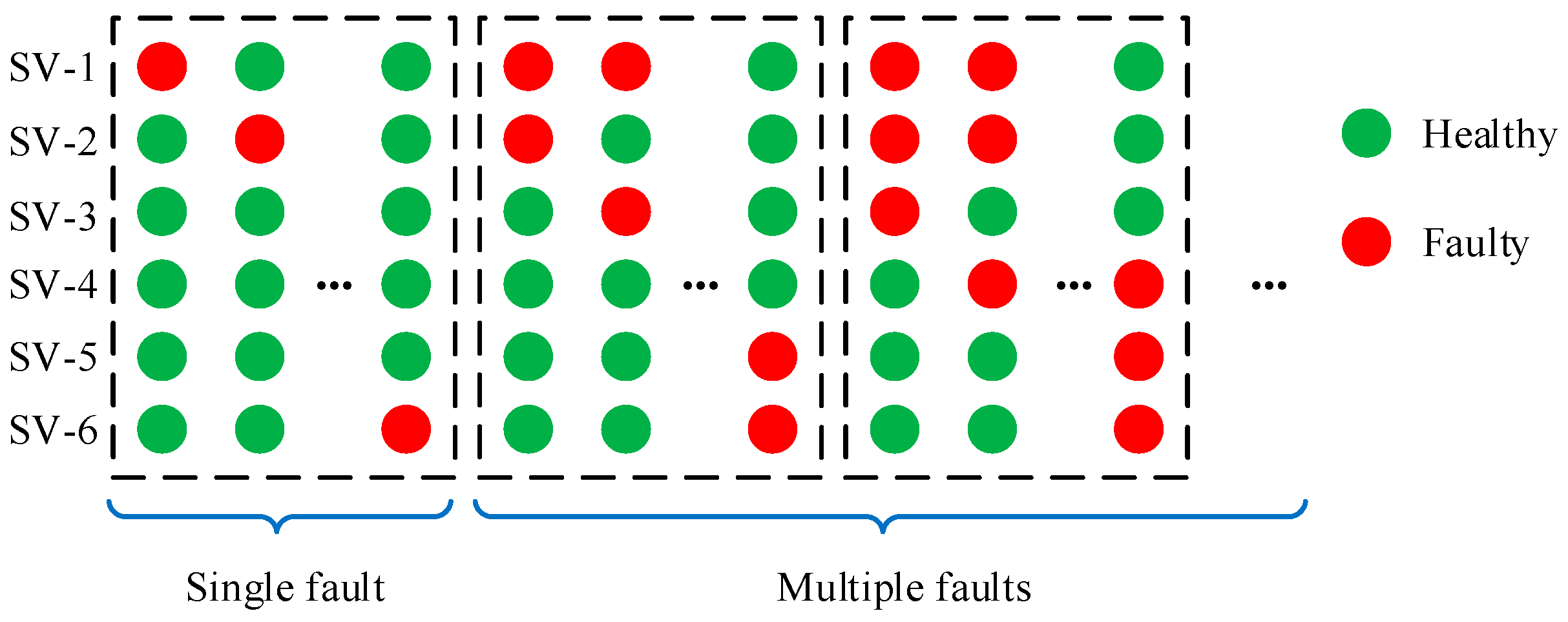
4.2.3. Analysis of Fault Separation Problem
4.3. Filter Recovery After GNSS Fault Exclusion
5. Simulation and Discussion
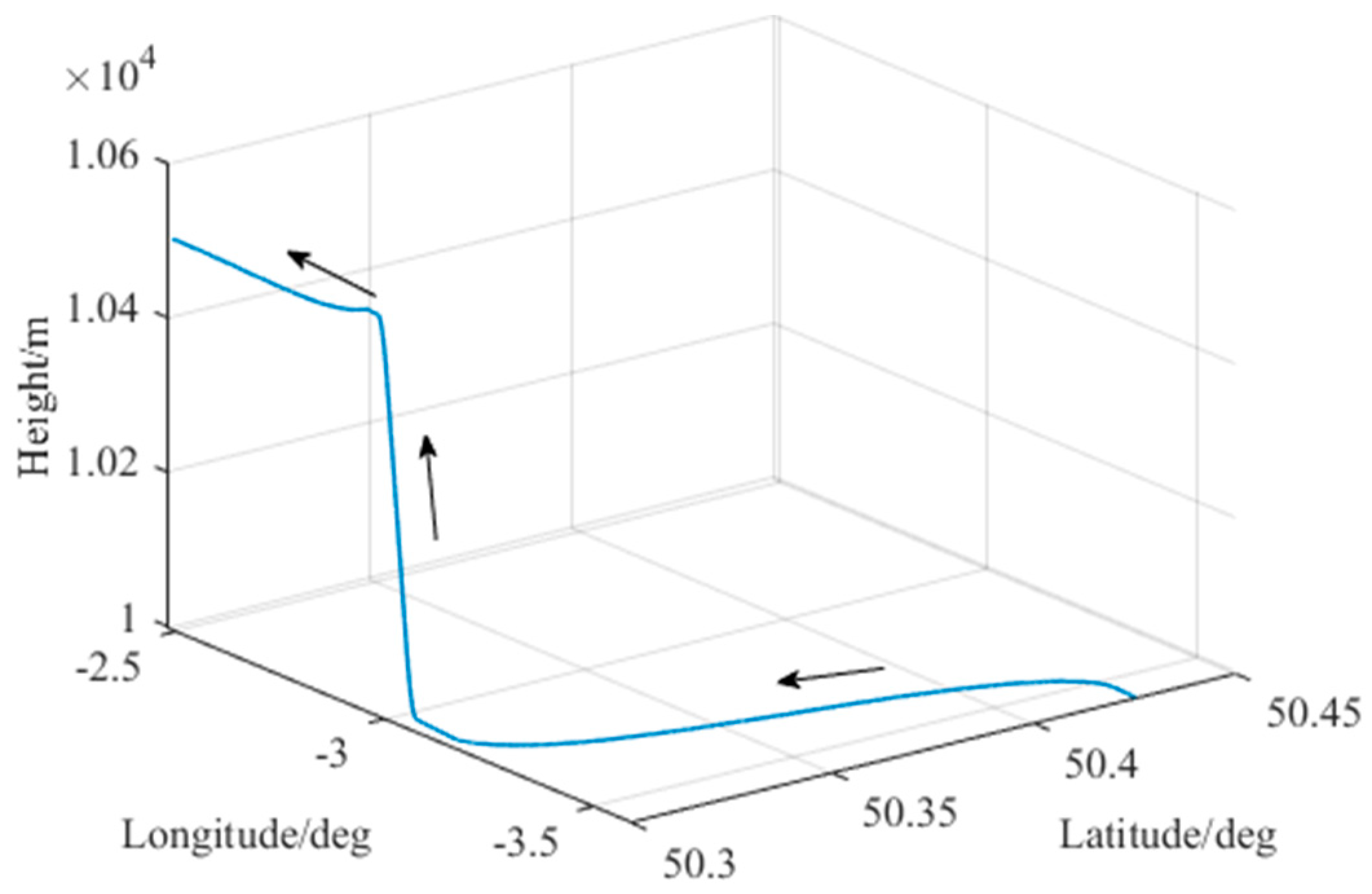
5.1. Simulation Description
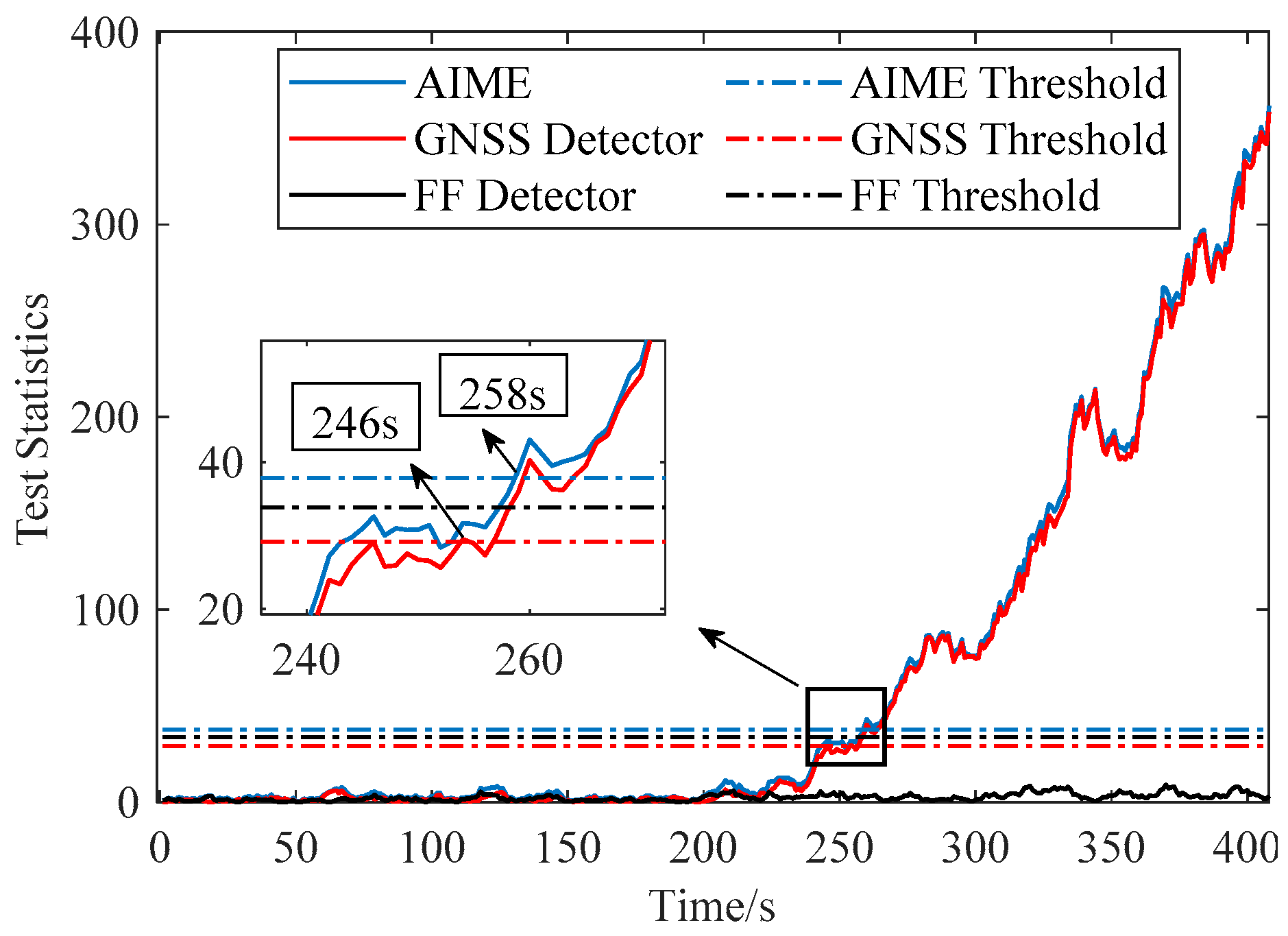
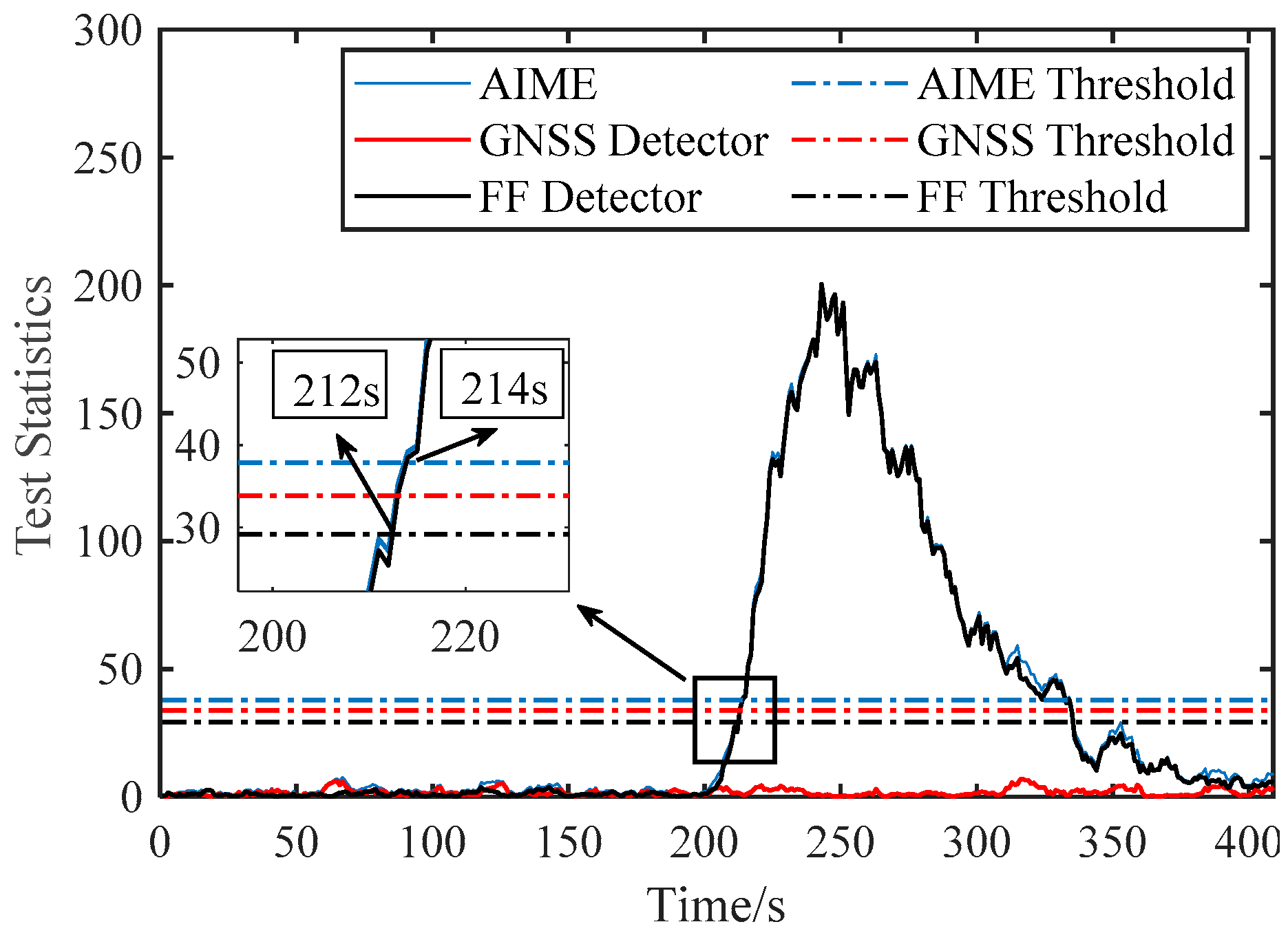
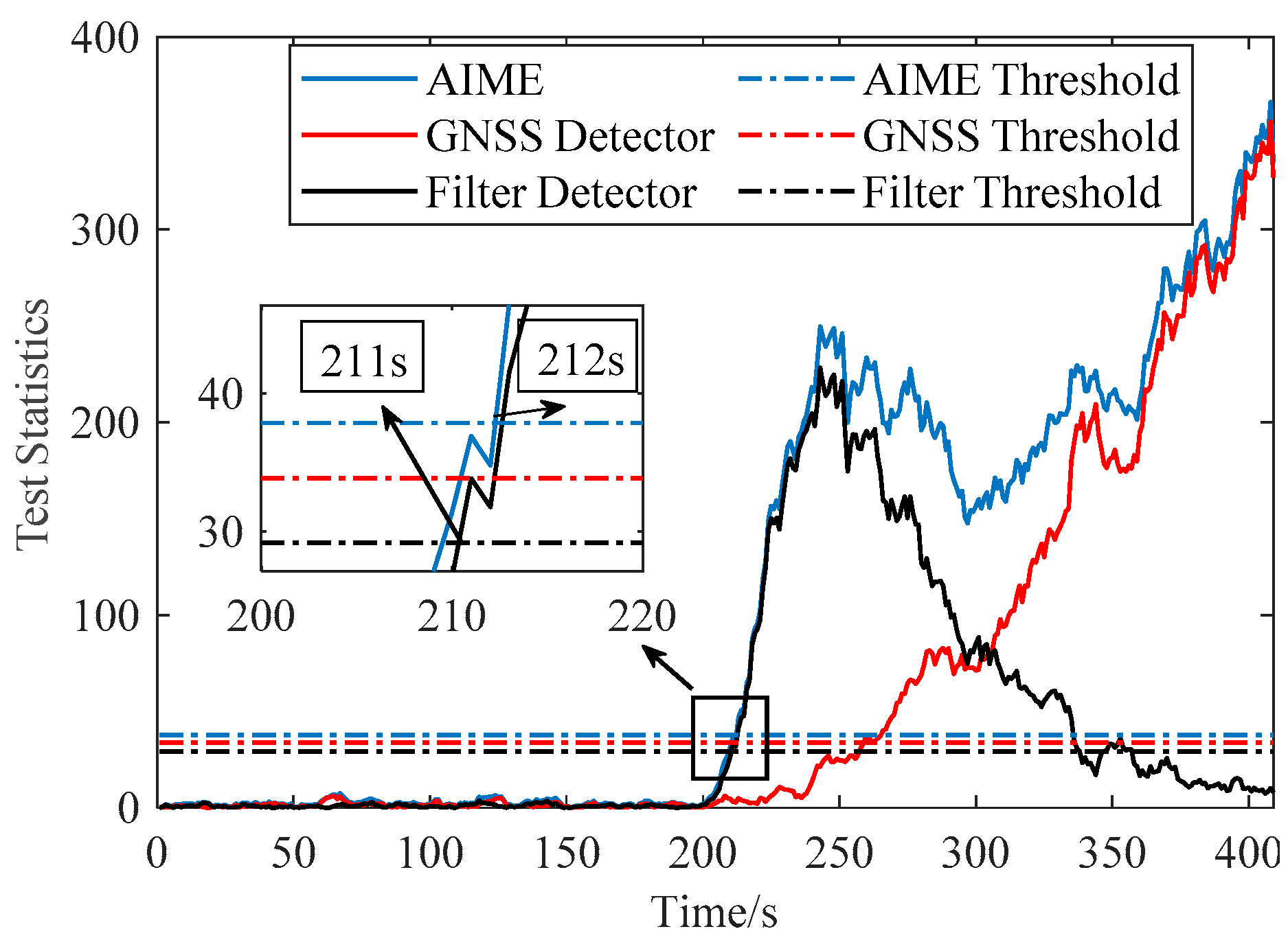
5.2. Fault Detection Based on AIME and FG-AIME
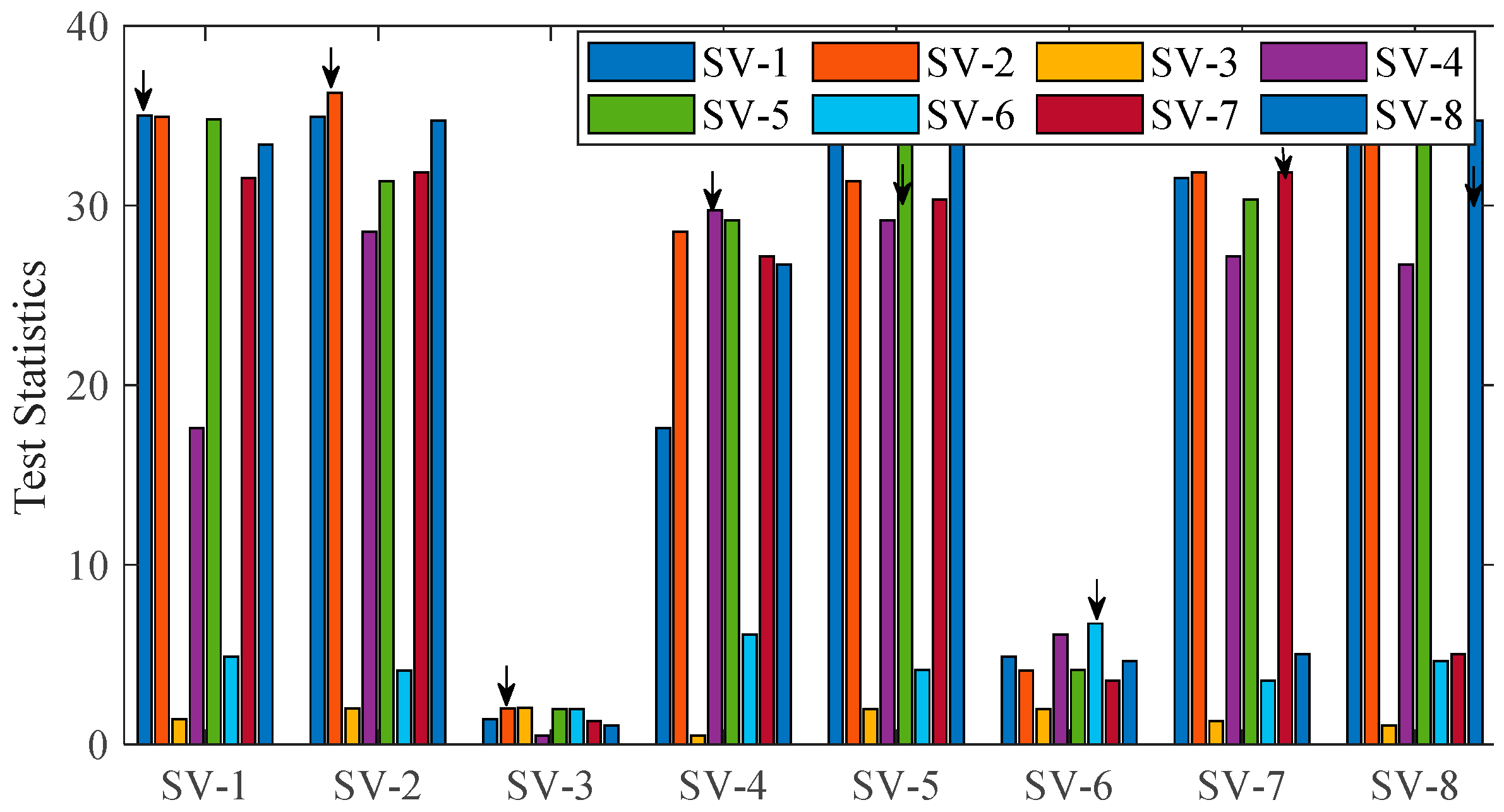
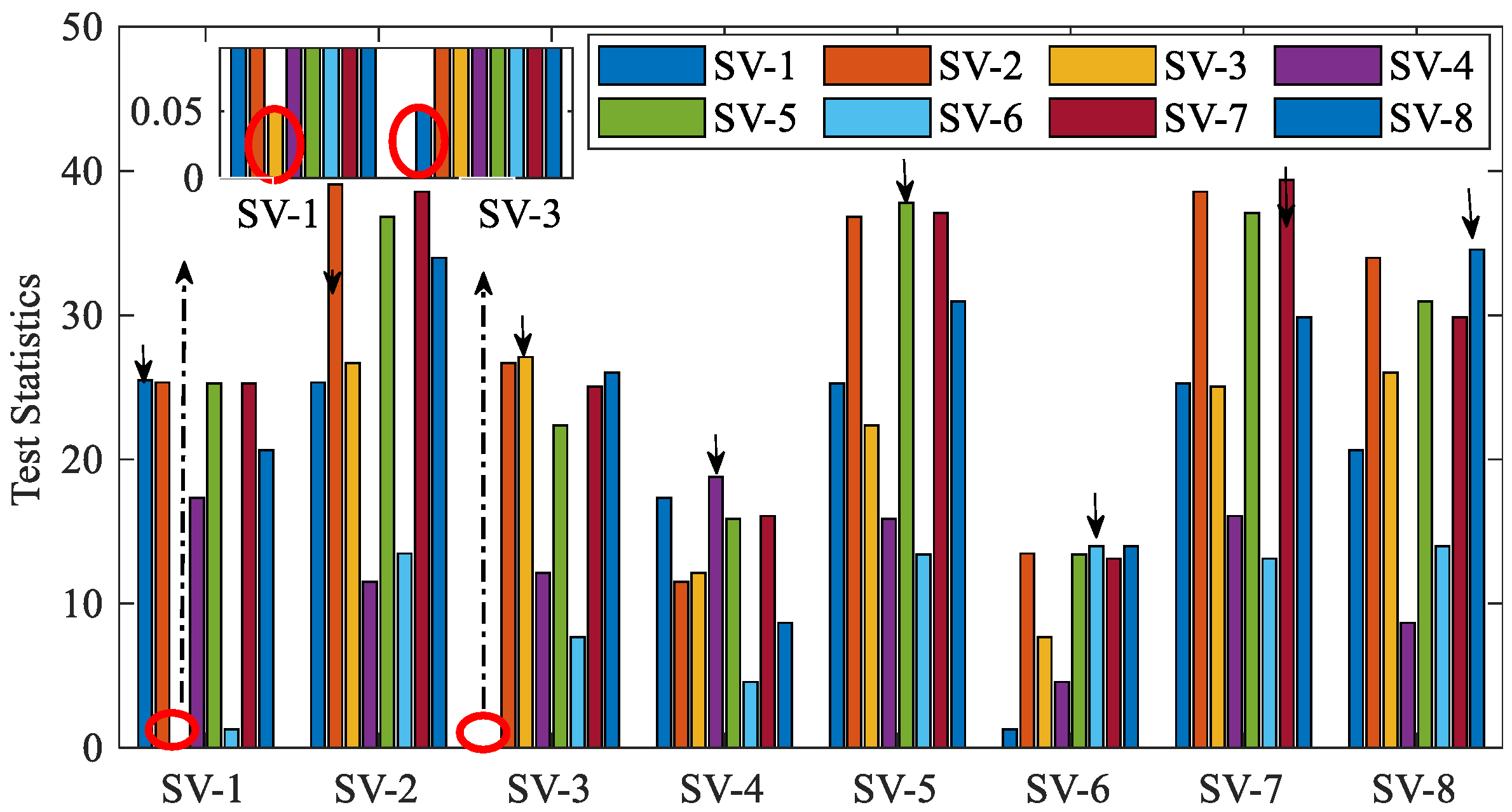
5.3. GNSS Fault Exclusion, Fault Separation, and Filter Recovery
6. Conclusions and Prospects
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Faults’ Effects on the Navigation Solution
Appendix B. Determination of and in COMPARE Module
Appendix C. Determination of the Optimal Preceding Horizon Length for Re-Filter Method
References
- Groves, P. Book Principles of GNSS, Inertial and Multi-Sensor Integrated Navigation Systems, 2nd ed.; Artech House: London, UK, 2013; ISBN 978-1-60807-005-3. [Google Scholar]
- Noureldin, A.; El-Shafie, A.; Bayoumi, M. GPS/INS integration utilizing dynamic neural networks for vehicular navigation. Inf. Fusion 2011, 12, 48–57. [Google Scholar] [CrossRef]
- Angrisano, A. GNSS/INS Integration Methods. Ph.D. Thesis, University of Calgary, Calgary, AB, Canada, 2010. [Google Scholar]
- Joerger, M.; Pervan, B. Kalman filter-based integrity monitoring against sensor faults. J. Guid. Control Dyn. 2013, 36, 349–361. [Google Scholar] [CrossRef]
- Vascik, P.D.; Hansman, R.J.; Dunn, N.S. Analysis of Urban Air Mobility Operational Constraints. J. Air Transp. 2018, 26, 133–146. [Google Scholar] [CrossRef]
- Zhai, Y.; Joerger, M.; Pervan, B. Fault Exclusion in Multi-Constellation Global Navigation Satellite Systems. J. Navig. 2018, 71, 1281–1298. [Google Scholar] [CrossRef]
- Lee, J.; Kim, M.; Min, D.; Lee, J. Integrity Algorithm to Protect against Sensor Faults in Tightly-coupled KF State Prediction. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 16–20 September 2019; pp. 594–627. [Google Scholar]
- Ober, P.B.; Harriman, D. On the Use of Multiconstellation-RAIM for Aircraft Approaches. In Proceedings of the 19th International Technical Meeting of the Satellite Division of the Institute of Navigation, Fort Worth, TX, USA, 26–29 September 2006; pp. 2587–2596. [Google Scholar]
- Blanch, J.; Walker, T.; Enge, P.; Lee, Y.; Pervan, B.; Rippl, M.; Spletter, A.; Kropp, V. Baseline advanced RAIM user algorithm and possible improvements. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 713–732. [Google Scholar] [CrossRef]
- Diesel, J.; Luu, S. GPS/IRS AIME: Calculation of Thresholds and Protection Radius Using Chi-Square Methods. In Proceedings of the 8th International Technical Meeting of the Satellite Division of the Institute of Navigation, Palm Springs, CA, USA, 12–15 September 1995; pp. 1959–1964. [Google Scholar]
- Crespillo, O.G.; Grosch, A.; Skaloud, J.; Meurer, M. Innovation vs. Residual KF Based GNSS/INS Autonomous Integrity Monitoring in Single Fault Scenario. In Proceedings of the 30th International Technical Meeting of the Satellite Division of the Institute of Navigation, Portland, OR, USA, 25–29 September 2006; pp. 2126–2136. [Google Scholar]
- Call, C.; Ibis, M.; McDonald, J.; Vanderwerf, K. Performance of Honey well’s Inertial/GPS Hybrid (HIGH) for RNP operations. In Proceedings of the IEEE/ION PLANS 2006, San Diego, CA, USA, 25–27 April 2006; pp. 244–255. [Google Scholar]
- Bhatti, U.I.; Ochieng, W.Y. Detecting Multiple failures in GPS/INS integrated system: A Novel architecture for Integrity Monitoring. J. Glob. Position. Syst. 2010, 8, 26–42. [Google Scholar] [CrossRef][Green Version]
- Yang, L.; Li, Y.; Wu, Y.; Rizos, C. An enhanced MEMS-INS/GNSS integrated system with fault detection and exclusion capability for land vehicle navigation in urban areas. GPS Solut. 2014, 18, 593–603. [Google Scholar] [CrossRef]
- Giremus, A.; Escher, A.C. A GLR algorithm to detect and exclude up to two simultaneous range failures in a GPS/Galileo/IRS case. In Proceedings of the 20th International Technical Meeting of the Satellite Division of the Institute of Navigation, Fort Worth, TX, USA, 25–28 September 2007; pp. 2911–2923. [Google Scholar]
- Hewitson, S.; Wang, J. Extended Receiver Autonomous Integrity Monitoring (eRAIM) for GNSS/INS Integration. J. Surv. Eng. 2010, 136, 13–22. [Google Scholar] [CrossRef]
- Bhatti, U.I.; Ochieng, W.Y.; Feng, S. Performance of rate detector algorithms for an integrated GPS/INS system in the presence of slowly growing error. GPS Solut. 2012, 16, 293–301. [Google Scholar] [CrossRef]
- Zhong, L.; Liu, J.; Li, R.; Wang, R. Approach for Detecting Soft Faults in GPS/INS Integrated Navigation based on LS-SVM and AIME. J. Navig. 2017, 70, 561–579. [Google Scholar] [CrossRef]
- Guo, C.; Li, F.; Tian, Z.; Guo, W.; Tan, S. Intelligent active fault-tolerant system for multi-source integrated navigation system based on deep neural network. Neural Comput. Appl. 2019, 1, 1–18. [Google Scholar] [CrossRef]
- Crespillo, O.G.; Medina, D.; Skaloud, J.; Meurer, M. Tightly coupled GNSS/INS integration based on robust M-estimators. In Proceedings of the IEEE/ION PLANS 2018, Monterey, CA, USA, 23–26 April 2018; pp. 1554–1561. [Google Scholar]
- Miao, L.; Shi, J. Model-based robust estimation and fault detection for MEMS-INS/GPS integrated navigation systems. Chin. J. Aeronaut. 2014, 27, 947–954. [Google Scholar] [CrossRef]
- Wang, S.; Zhan, X.; Pan, W. GNSS/INS tightly coupling system integrity monitoring by robust estimation. J. Aeronaut. Astronaut. Aviat. Ser. A 2018, 50, 61–80. [Google Scholar]
- Liang, Y.; Jia, Y. A nonlinear quaternion-based fault-tolerant SINS/GNSS integrated navigation method for autonomous UAVs. Aerosp. Sci. Technol. 2015, 40, 191–199. [Google Scholar] [CrossRef]
- Roysdon, P.F.; Farrell, J.A. GPS-INS outlier detection & elimination using a sliding window filter. In Proceedings of the 2017 American Control Conference, Seattle, WA, USA, 24–26 May 2017; pp. 1244–1249. [Google Scholar]
- Zhu, N.; Marais, J.; Betaille, D.; Berbineau, M. GNSS Position Integrity in Urban Environments: A Review of Literature. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2762–2778. [Google Scholar] [CrossRef]
- Arana, G.D.; Hafez, O.A.; Joerger, M.; Spenko, M. Recursive Integrity Monitoring for Mobile Robot Localization Safety. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 305–311. [Google Scholar] [CrossRef]
- Tanıl, Ç.; Khanafseh, S.; Joerger, M.; Pervan, B. Sequential integrity monitoring for Kalman filter innovations-based detectors. In Proceedings of the 31st International Technical Meeting of the Satellite Division of the Institute of Navigation, Miami, FL, USA, 24–28 September 2018; pp. 2440–2455. [Google Scholar]
- Lee, J.; Kim, M.; Lee, J.; Pullen, S. Integrity assurance of Kalman-filter based GNSS/IMU integrated systems against IMU faults for UAV applications. In Proceedings of the 31st International Technical Meeting of the Satellite Division of the Institute of Navigation, Miami, FL, USA, 24–28 September 2018; pp. 2484–2500. [Google Scholar]
- Crispoltoni, M.; Fravolini, M.L.; Balzano, F.; D’Urso, S.; Napolitano, M.R. Interval fuzzy model for robust aircraft imu sensors fault detection. Sensors 2018, 18, 2488. [Google Scholar] [CrossRef]
- Bhatti, U.I.; Ochieng, W.Y. Failure modes and models for integrated GPS/INS systems. J. Navig. 2007, 60, 327–348. [Google Scholar] [CrossRef]
- RTCA Special Committee. Minimum Operational Performance Standards for GPS WAAS Airborne Equipment (DO-229D); RTCA Inc.: Washington, WA, USA, 2006. [Google Scholar]
- Pasquale, G.; Somà, A. Reliability testing procedure for MEMS IMUs applied to vibrating environments. Sensors 2010, 10, 456–474. [Google Scholar] [CrossRef]
- Grover Brown, R. A Baseline GPS RAIM Scheme and a Note on the Equivalence of Three RAIM Methods. Navigation 1992, 39, 301–316. [Google Scholar] [CrossRef]
- Avram, R.C.; Zhang, X.; Muse, J. Quadrotor Sensor Fault Diagnosis with Experimental Results. J. Intell. Robot. Syst. Theory Appl. 2017, 86, 115–137. [Google Scholar] [CrossRef]
- Bhattacharyya, S.; Gebre-Egziabher, D. Kalman filter-based RAIM for GNSS receivers. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2444–2459. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sources | Causes | Models |
|---|---|---|
| GNSS pseudoranges | They are caused by Signal-In-Space errors, ionosphere and troposphere propagation delay, multipath and receiver noise, etc. | The measurement noise is modeled as zero-mean GWN with covariance matrix Rk. |
| IMU measurements | For high-end IMU, only bias drift and random noises should be considered 1. | Bias drift is modeled as a first order Gauss-Markov process and is included in the error states; random noises are modeled as zero-mean GWN and their covariance is given in Qk. |
| Last navigation solution | The noises in last navigation solution are caused by the noises in previous prediction and update steps. | The noises are described by a zero-mean multi-dimensional Gaussian distribution, whose covariance matrix is PK−1. |
| Sources | Causes | Types |
|---|---|---|
| GNSS pseudoranges (labeled as ) | They are caused by satellite clock jump, clock drift, incorrect ephemeris, etc. | Typical fault types include: ramp faults and step faults [31]. |
| IMU measurements (included in ) | IMU faults, including bias instability and scale-factor non-linearity, gyro drift, etc., may occur due to various internal and external causes, e.g., mechanical failures, abnormal temperature, excessive humidity, severe vibration, etc. [32]. | Typical faults in IMU are in the form of ramp faults, step faults, periodic faults, and constant output. |
| Last navigation solution (included in ) | The faults in last navigation solution are caused by the undetected faults occurring prior to current time, including the previous faults in IMU and GNSS. | The type of this fault is related to the types and duration of the previous faults in GNSS and IMU [28], and it can be stepped, ascending or descending. |
| Results | Exclude All Faulty Satellites? | Exclude Any Healthy Satellites? |
|---|---|---|
| Right exclusion | YES | NO |
| Over exclusion | YES | YES |
| Incomplete exclusion | NO | YES/NO |
| Sensors | Parameter | Value |
|---|---|---|
| IMU | Accelerometer noise root PSD 1 | |
| Gyro noise root PSD | ||
| Accelerometer biases (body frame) | ||
| Gyro biases (body frame) | [−0.0009; 0.0013; 0.0008] °/hr | |
| Output rate | 100 Hz | |
| GNSS | Pseudorange noise (1) | 2.5 m |
| Output rate | 1 Hz | |
| Number of visible satellites | 8 |
| No. | Sources | Fault Information | Fault Duration |
|---|---|---|---|
| 1 | GNSS | Add 0.1 m/s ramp fault to SV-1 or SV-3 1 | 200 s-end |
| 2 | Add 0.1 m/s ramp faults to SV-1 and SV-3 | ||
| 3 | IMU | Add 0.2 m/s2 step faults to each accelerometer axis | |
| 4 | GNSS&IMU | Add 0.1m/s ramp fault to SV-1 and 0.2 m/s2 step faults to each accelerometer axis |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Zhan, X.; Zhai, Y.; Liu, B. Fault Detection and Exclusion for Tightly Coupled GNSS/INS System Considering Fault in State Prediction. Sensors 2020, 20, 590. https://doi.org/10.3390/s20030590
Wang S, Zhan X, Zhai Y, Liu B. Fault Detection and Exclusion for Tightly Coupled GNSS/INS System Considering Fault in State Prediction. Sensors. 2020; 20(3):590. https://doi.org/10.3390/s20030590
Chicago/Turabian StyleWang, Shizhuang, Xingqun Zhan, Yawei Zhai, and Baoyu Liu. 2020. "Fault Detection and Exclusion for Tightly Coupled GNSS/INS System Considering Fault in State Prediction" Sensors 20, no. 3: 590. https://doi.org/10.3390/s20030590
APA StyleWang, S., Zhan, X., Zhai, Y., & Liu, B. (2020). Fault Detection and Exclusion for Tightly Coupled GNSS/INS System Considering Fault in State Prediction. Sensors, 20(3), 590. https://doi.org/10.3390/s20030590